Способ относится к технике испытаний колесных транспортных средств, в частности измерения и регулировки углов развала и схождения колес автомобилей.
Известны устройства регулировки углов установки колеса автомобиля, реализующие соответствующие способы (см., например, стенды американской фирмы "HUNTER" с измерительными системами DSP250, DSP300. Сайт www.hunter.com). Измерительные системы этих стендов, в которых используют емкостные датчики углов, встроенные специализированные цифровые процессоры, инфракрасную технику, кабельные или эфирные каналы для связи с ЭВМ и т.п., требуют ручной установки на колеса автомобиля, проведения частой калибровки и юстировки, а для выполнения ряда операций - вывешивать автомобиль.
При известных достоинствах этих способов, реализуемых с помощью соответствующих устройств, следует отметить их сложность, в том числе и в эксплуатации, и низкую степень автоматизации.
Наиболее близким по технической сущности и достигаемым результатам является способ регулировки углов установки колеса автомобиля, реализуемый с помощью американского стенда "Hunter 811" (см. сайт www.hunter.com., компакт - диск). Этот способ принят за прототип.
В основу способа положена современная технология Three Dimensions (3D), посредством которой, в частности, реализуются пространственные измерения, например, с помощью оптико-электронных устройств.
При реализации этого способа регулировки углов установки колеса автомобиля автомобиль устанавливают продольной плоскостью параллельно оптической оси телевизионной камеры, на колесо монтируют оптическую мишень с плоским односторонним практически изотропным детерминированным контрастным изображением (светлые треугольники на темном фоне, расположенные рядами). Вначале прокатывают автомобиль, например, на один оборот колеса в направлении телевизионной камеры. В этом процессе считывают изображения оптической мишени телевизионной камерой, видеосигналы которой запоминают в ЭВМ, по ним определяют смещения изображений оптической мишени, с помощью которых вычисляют углы установки колеса автомобиля. В частности, так можно измерить радиальное и осевое биения колеса. Затем останавливают колесо автомобиля на заданном расстоянии от телевизионной камеры, вновь считывают изображения оптической мишени телевизионной камерой, видеосигналы которой запоминают в ЭВМ, по ним определяют смещения изображений оптической мишени, с помощью которых вычисляют углы установки колеса автомобиля и проводят дополнительные регулировки.
При всех достоинствах этого способа регулировки углов установки колеса автомобиля процессы определения смещений изображений оптической мишени явно усложнены, т.к. требуют применения сложных алгоритмов и значительных вычислительных мощностей, например, из-за того, что в процессе прокатывания автомобиля изображение оптической мишени в поле зрения телевизионной камеры претерпевает кардинальные изменения.
Техническим результатом создания предлагаемого способа регулировки углов установки колеса автомобиля является устранение этого недостатка прототипа, в частности, тем, что оптическую мишень выполняют в виде круглого цилиндра, на который наносят случайное изображение, обладающее ортогональной изотропией. Такое выполнение оптической мишени, в частности, упрощает процессы получения и использования информации о смещениях изображений оптической мишени, например, в известных пределах, вне зависимости от ширины колеи автомобиля и диаметра его колеса.
Технический результат достигается тем, что:
1. В способе регулировки углов установки колеса автомобиля, в котором устанавливают автомобиль продольной плоскостью параллельно оптической оси телевизионной камеры, монтируют на его колесо оптическую мишень с контрастным изображением, прокатывают автомобиль, например, на один оборот колеса в направлении телевизионной камеры, останавливают колесо автомобиля на заданном расстоянии от телевизионной камеры, для каждого положения колеса автомобиля считывают изображения оптической мишени телевизионной камерой, видеосигналы которой запоминают в ЭВМ, по ним определяют смещения изображений оптической мишени, с помощью которых вычисляют и регулируют углы установки колеса автомобиля, - оптическую мишень выполняют в виде круглого цилиндра, наносят на него случайное изображение, обладающее ортогональной изотропией, для каждого положения колеса автомобиля считывают изображения с помощью телевизионной камеры, например, тремя равноотстоящими строками, вычисляют с помощью ЭВМ функции взаимной корреляции запомненных видеосигналов крайних считывающих строк и крайних считывающих строк относительно центральной строки, определяют их экстремумы, по положениям которых определяют соответствующие смещения изображений оптической мишени, в процессе прокатывания автомобиля на каждом значении угла поворота колеса минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют смещение изображений крайних считывающих строк и по их отношению к расстоянию между крайними считывающими строками телевизионной камеры определяют сумму угла развала колеса и угла осевого биения колеса как функцию угла поворота колеса, по переменной составляющей которой определяют угол осевого биения колеса, а по постоянной составляющей определяют угол развала колеса, радиальное биение колеса находят по смещению телевизионной камеры, на заданном расстоянии колеса от телевизионной камеры минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса, увеличивают коэффициент увеличения объектива телевизионной камеры до тех пор, пока это значение угла развала колеса постоянно, до соответствующего максимального значения коэффициента увеличения объектива телевизионной камеры, определяют смещения изображений крайних считывающих строк относительно центральной строки, а угол схождения определяют как отношение суммы этих смещений к размеру между крайними строками телевизионной камеры, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса.
2. В способе по п.1 - на заданном расстоянии колеса от телевизионной камеры минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса, определяют смещения изображений крайних считывающих строк относительно центральной строки и определяют угол схождения как отношение половины суммы этих смещений к расстоянию между проекциями этих строк на оптическую мишень вдоль оптической оси телевизионной камеры, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса.
Реализацию способа поясняют фиг.1 и фиг.2. Измеряемые углы малы (их значения обычно не превышают 2 угловых градусов).
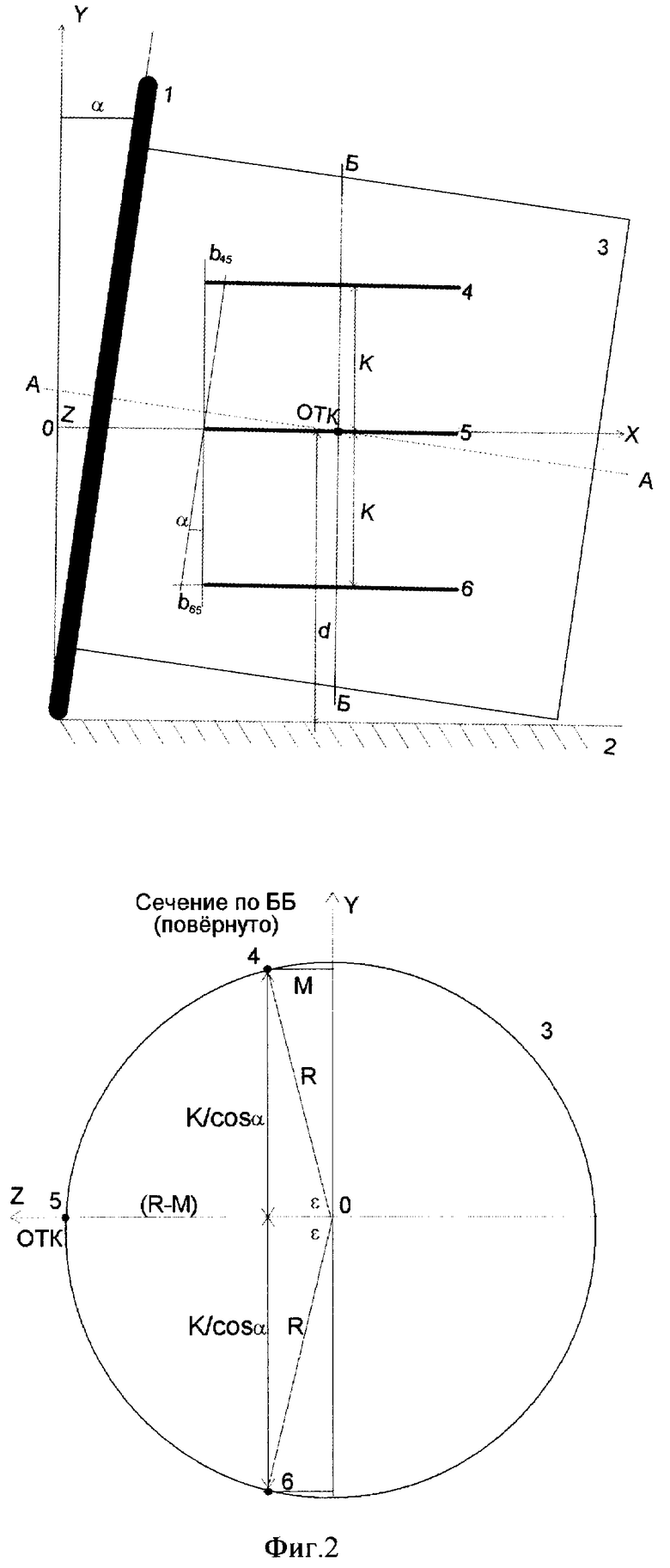
На фиг.1 приведен принцип измерения относительных перемещений соответствующих изображений при измерении углов установки колеса автомобиля.
Примем правую систему координат 0XYZ, начало которой совпадает с осью АА колеса автомобиля и условной осью вращения ее относительно подвески, например, левого переднего колеса автомобиля. Нас интересуют относительные параметры установки колеса автомобиля за счет поворота оси колеса АА вокруг оси 0Z (угол развала α колеса автомобиля) и вокруг оси Y (угол схождения γ колеса автомобиля). Относительный радиус (R-М) и ось АА колеса перпендикулярны.
При повороте колеса на угол развала α его плоскость станет параллельна линии
CC1. Будем полагать, что при заданном К возможно измерение относительных смещений b вдоль оси 0Х и, соответственно, можно определить угол развала α как α≈tgα=b/К.
Дополнительный поворот оси АА относительно оси 0Y вызовет соответствующий поворот плоскости колеса на угол схождения γ, что на относительном радиусе (R-М) создаст относительное смещение g вдоль оси 0Х. Аналогично, будем полагать, что при известном (R-М) возможно измерение относительных смещений g вдоль оси 0Х и, соответственно, можно определить угол схождения γ как γ≈sinγ=g/(R-М).
Телевизионная камера (ТК) установлена так, что ее оптическая ось (ОТК) пересекает ось 0Х и перпендикулярна плоскости 0XY. С помощью ТК считывают соответствующие изображения (не показаны), связанные с осью АА колеса, которые позволяют непосредственно в фокальной плоскости ТК определить относительные смещения этих изображений. ТК имеет возможность перемещаться вдоль оси Y. Видеосигналы соответствующих изображений запоминают в ЭВМ (не показана).
Для измерения указанных смещений они должны иметь соответствующие признаки, позволяющие их определить. Такие признаки присущи исходному случайному изображению, обладающему ортогональной изотропией и связанному с осью АА колеса. Предложенное изображение (на фиг.1 не показано) относительно просто выполнить в виде перпендикулярных оси АА колеса случайно расположенных параллельных линий, ширина которых также случайна. Строгая изотропия изображения вдоль этих линий позволяет найти относительные смещения изображений (которые представлены в ЭВМ соответствующими видеосигналами) вдоль оси Х с помощью вычисления этих смещений по положению экстремума функции взаимной корреляции (ФВК) соответствующих видеосигналов. В свою очередь, изотропия по ортогональному направлению позволяет исключить многозначность вычисления положения экстремума ФВК. В целом, относительные смещения изображений могут быть найдены для любых точек исходного случайного изображения. При этом необходимым условием получения измерительной информации является считывание видеосигналов указанного изображения, а достаточным - наличие различимого экстремума ФВК. Как известно из теории оптимального приема сообщений, точность определения такого смещения пропорциональна количеству информации, содержащейся в сигнале (видеосигнале). Отметим важную особенность выбранного способа измерения относительных смещений b и g - он исключает погрешности измерений за счет параллакса.
На фиг.2 приведен вид на колесо 1 автомобиля (не показан). Для нее γ=0. Плоскость 0XZ расположена на расстоянии d и параллельна горизонтальной жесткой базе 2, на которой установлено оборудование (например, ТК) и автомобиль. Колесо 1 находится в поле зрения объектива ТК (на фиг.2 не показана). При осевом биении колеса 1 его мгновенная ось вращения образует с осью АА угол осевого биения β (не показан). При радиальном биении колеса его ось АА перемещается вдоль оси Y при прокатывании автомобиля (меняется размер d).
Оптическая ось ТК проходит через ось установленной на колесо 1 быстросъемной технологической оптической мишени (ОМ) 3, выполненной в виде круглого цилиндра, имеющего радиус R. На нем нанесено случайное изображение, обладающее ортогональной изотропией (на фиг.2 не показано). Ось ОМ 3 совпадает с осью АА колеса 1. Исполнение ОМ 3 в виде цилиндра позволяет получить относительные смещения g, определяемые углом схождения γ. ТК формирует на ОМ 3 считывающий растр, например, из трех строк 4, 5 и 6 (показаны условно), которые параллельны оси 0Х и расположены на фиксированных расстояниях К. Строками 4, 5 и 6 растра ТК соответствующие изображения ОМ 3 могут быть считаны и запомнены, например, в ЭВМ (не показана). При этом, как следует из фиг.2, видеосигнал, например, строки 4 опережает видеосигнал строки 5 по фазе, а строки 6 - отстает. Значения отрезков b45 и b65 прямо пропорциональны таким смещениям фазы, а отрезок b46 (не показан) - смещению фазы видеосигнала строки 4 относительно строки 6, причем из фиг.2 следует: b46=2 b45=2b65. Из представленных фигур также следует, что относительные смещения изображений b45 и b65 имеют противоположные знаки, a g45 и g65 - одинаковые.
Автомобиль можно перекатывать по горизонтальной жесткой базе 2 вдоль оси 0Z в процессе работы способа. При этом изображение всегда будет образовывать с осью Y угол развала α, если отсутствует осевое биение колеса 1 относительно оси АА автомобиля. В противном случае угол биения β будет переменной составляющей угла развала α (при вращении колеса на угол ω). Аналогично, переменная составляющая размера d будет определять радиальное биение колеса 1.
Заметное осевое биение колеса 1 практически исключает целесообразность регулировки его углов установки, т.е. такое колесо должно быть забраковано.
Сечение по ББ позволяет найти относительный радиус (R-М), необходимый при определении относительных смещений изображений g при γ≠0. Относительные смещения g45 и g65 (на фиг.2 не показаны) изображений строк 4 и 6 относительно строки 5 изображения ОМ 3 определяются поворотом этого радиуса вокруг оси Y на угол γ (в соответствии с фиг.1). Поэтому: g45/(R-М)=sinγ, g65/(R-М)=sinγ. Значения относительных смещений g45, g65 видеосигналов определяются углом схождения γ колеса, положением ОТК в вертикальной плоскости относительно ее положения на фиг.2 (например, за счет радиального биения колеса 1) и расстоянием М, определяемым с помощью радиуса R и вспомогательного угла ε.
Если М→0 и ОТК проходит через ось АА колеса 1 (как на фиг.2), то выражение для sinγ существенно упрощается: g45/К=sinγ≈γ (при К=R). Очевидно, последнее равенство позволяет проводить все вычислительные операции через величины, определяемые только в фокальной плоскости ТК. Для того чтобы обеспечить выполнение этого равенства (или К≈R), можно увеличить коэффициент увеличения объектива ТК, а в качестве критерия предельного значения увеличения этого параметра ТК использовать значение экстремума ФВК. Его значение упадет до значения шума сигнала ФВК (т.е. станет невозможно правильно определять смещения изображений), если строки 4 и 6 "вылезут" за границы изображения ОМ 3 (К>R).
Отметим, что некоторое изменение масштаба изображений, считываемых, например, строками 4 и 5, 6 и 5 ТК (они разнесены вдоль оси 0Z - см. фиг.2) сказывается лишь на значении экстремума ФВК и не вносит погрешностей при определении смещений изображений ОМ 3.
Способ по п.1 осуществляется следующим образом. При его реализации на основе принципа суперпозиции учитываются оба угла (α и γ) установки колеса 1.
Процесс 1.1.
1.1.1. Оптическую мишень выполняют в виде круглого цилиндра и наносят на него случайное изображение, обладающее ортогональной изотропией.
1.1.2. Автомобиль заводят на жесткую базу 2 и устанавливают так, чтобы его продольная плоскость была параллельна плоскости 0YZ. Устанавливают на колесо 1 ОМ 3 и фиксируют ее так, чтобы ее ось совпадала с осью АА колеса 1, а сама ОМ 3 находилась в поле зрения телекамеры.
1.1.3. Считывают изображения ОМ 3 строками 4, 5, 6 растра ТК и запоминают видеосигналы, например, в ЭВМ. Вычисляя затем с помощью ЭВМ функции взаимной корреляции (ФВК) видеосигналов строк 4 и 5, 6 и 5, определяют положения экстремумов ФВК на строках 4 и 6, т.е. определяют размеры (g45+b45) и (g65-b65). Находят сумму (g45+b45)+(g65-b65). Из фиг.2 видно, а из примера выполнения фрагментов способа (см. ниже) следует, что эта сумма имеет минимум, если ОТК пересекает ось АА колеса 1. В этом же положении |b45|=|-b65|, g45=g65 или (g45+b45)+(g65-b65)=(g45+g65). Поэтому меняют размер d (положение ТК) так, чтобы минимизировать сумму до величины (g45+g65)=2g45 =2g65.
1.1.4. Вычисляют с помощью экстремума ФВК смещение b46 изображения строки 4 относительно строки 6.
1.1.5. 3апоминают значения b46 и положение ТК.
1.1.6. Прокатывают автомобиль, например, в направлении ТК (поворачивают колесо 1 на приращение угла ω).
1.1.7. Повторяют операции 1.1.3, 1.1.4, 1.1.5, 1.1.6 требуемое число раз с тем, чтобы получить и запомнить зависимости b46(ω) и положения ОТК d(ω) от угла поворота ω колеса, например, на один его оборот.
1.1.8. Определяют переменные составляющие полученных в операциях 1.1.3, 1.1.4, 1.1.5, 1.1.6, 1.1.7 зависимостей и по ним судят о наличии осевого и радиального биения колеса. Переменная составляющая bβ(ω) зависимости b46(ω) определяет угол осевого биения β(ω)=bβ(ω)/2К, а переменная составляющая d(ω) - радиальное биение колеса 1.
1.1.9. Определяют постоянные составляющие зависимостей d(ω) и b46(ω) колеса 1. По постоянной составляющей bα процесса b46(ω) находят α≈tgα=bα/2К, а постоянная составляющая d(ω) определяет положение оси АА колеса относительно жесткой базы 2.
По полученным результатам измерения биений колеса принимают, при необходимости, решение о замене колеса 1 кондиционным.
Процесс 1.2.
1.2.1. Фиксируют положение колеса 1 на заданном расстоянии от ТК.
1.2.2. Выполняют п.1.1.3.
1.2.3. Вычисляют с помощью экстремума ФВК b46 и находят α≈tgα=b46/2К, принимают, при необходимости, это значение в качестве угла развала колеса.
1.2.4. Изменяют в сторону увеличения коэффициент увеличения объектива ТК и выполняют п.п.1.2.3, 1.2.4 до границы устойчивого определения соотношения п.1.2.3.
1.2.5. Определяют смещения изображений (g45+b45) и (g65-b65). При этом g45=g65.
1.2.6. Вычисляют γ≈sinγ=[(g45+b45)+(g65-b65)]/2К.
1.2.7. При необходимости, устанавливают исходное положение рулевого колеса; регулируют угол схождения γ так, чтобы получить g45 или g65, соответствующее требуемому углу схождения γ.
Способ по п.2 осуществляется следующим образом. При его реализации на основе принципа суперпозиции учитываются оба угла (α и γ) установки колеса 1.
Процесс 2.1.
2.1.1. Выполняют операции 1.1.1…1.1.8, 1.2.1…1.2.5 процесса способа по п.1.
Процесс 2.2.
2.2.1. Находят g45=g65=0,5[(g45+b45)+(g65-b65)].
2.2.2. Вычисляют γ≈sinγ=g45/R{1-cos[arcsin(K/R cosα)]} либо γ≈sinγ=g65/R{1-cos[arcsin(K/R cosα)]}.
2.2.3. При необходимости, устанавливают исходное положение рулевого колеса; регулируют угол схождения γ так, чтобы получить g45 или g65, соответствующее требуемому углу схождения γ.
Операции можно проводить для всех четырех колес автомобиля, используя четыре ТК и внеся необходимые коррекции. Они определяются положением ОТК d относительно горизонтальной жесткой базы 2 (например, если ТК для задних колес расположены над ТК передних колес) и геометрическими параметрами автомобиля, например расстоянием между его передними и задними осями. Как следует из приведенного выше, угловое перемещение ТК при известных условиях эквивалентно ее линейному перемещению.
Пример выполнения фрагментов способа
Пусть R=150 мм или 1050 пиксел (в размерности фокальной плоскости ТК), α=γ=2°. В ТК используется твердотельная светочувствительная матрица размером 2048×2048 пиксел (4 мегапиксела), оптика ТК обеспечивает требуемое разрешение. Каждый пиксел имеет размеры δ×δ=0,003×0,003 мм. Считывающий растр на матрице организуем строками №1 (например, строка 4), 1024 (строка 5) и №2047 (строка 6), т.е. размер 2·К=2046 пиксел (на матрице). Очевидно, используемая матрица избыточна и желательно применение специальной матрицы, например, с заявленными выше характеристиками.
1. Определим g45 и g65 при γ=2° (операция 1.1.3).
Получены (при α=0) соотношение для размеров:
g45=R sinγ{cos[arcsin(Δ/R)]-cos[arcsin((К/cosα+Δ)/R)]};
g65=R sinγ{cos[arcsin(Δ/R)]-cos[arcsin((K/cosα-Δ)/R)]}.
Здесь Δ - значение возможного смещения считывающего растра ТК вдоль оси Y относительно положения, приведенного на фиг.2. Расчетные значения этих величин приведены в таблице 1.
После этого для определения угла (α+β) необходимо найти катет b46 прямоугольного треугольника, т.е: b46=2К tg(α+β). Для α=2° и β=0 получаем: b46=2К tgα=2046·tg 2°=2046·0,035=71,61 пиксела или: 71,61 пиксела / 120`=0,6 пиксела на 1 угловую минуту угла развала α (tgα≈α для малых углов).
2. Определим смещение изображений при γ=2° (операция 2.2.2).
Получено (при α=0) соотношение для размера g45=R sinγ{1-cos[arcsin(K/R)]}. Найдем g45=1050 sin 2° {1-cos[arcsin(1023/1050)]}=20,39 пиксел. Или: 20,39 пиксел / 120`=0,2366 пиксел на 1 угловую минуту угла схождения γ. Значение параметра g45, как и параметров b (для угла α), находится в процессах работы способа (см. выше) и не требует вычисления по приведенной в примере формуле.
Таким образом, предлагаемый "Способ регулировки углов установки колеса автомобиля" вполне реализуем, не обладает значимыми источниками погрешностей измерений, обеспечивает минимальную трудоемкость и высокое качество работы за счет высокой степени автоматизации измерений. Потенциально способ может быть достаточно просто сопряжен с человеком - оператором с помощью специальной интерактивной программы, реализованной, например, на ЭВМ, его обслуживающей. Прототип работает с аналогичной программой.
Проведя анализ уровня техники по научно-техническим источникам информации, заявитель не обнаружил аналог с признаками, идентичными признакам предлагаемого изобретения "Способ регулировки углов установки колеса автомобиля".
Выбранный прототип позволил выявить в заявляемом способе совокупность существенных и явным образом не следующих из уровня техники по отношению к усматриваемому техническому результату отличительных признаков, изложенных в формуле предлагаемого изобретения. Следовательно, заявляемое предлагаемое изобретение "Способ регулировки углов установки колеса автомобиля" соответствует критериям новизны и изобретательского уровня.
Критерий промышленной применимости заявляемого "Способа регулировки углов установки колеса автомобиля" подтверждается его потенциальной эффективностью.
Изобретение относится к технике измерения и регулировки углов развала и схождения колес автомобилей. Способ заключается в том, что оптическую мишень выполняют в виде круглого цилиндра, наносят на него случайное изображение. Для каждого положения колеса автомобиля считывают изображения с помощью телевизионной камеры. Вычисляют с помощью ЭВМ функции взаимной корреляции запомненных видеосигналов крайних считывающих строк и крайних считывающих строк относительно центральной строки, определяют их экстремумы, по положениям которых определяют соответствующие смещения изображений оптической мишени. Определяют смещение изображений крайних считывающих строк. Определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса. Увеличивают коэффициент увеличения объектива телевизионной камеры до тех пор, пока это значение угла развала колеса постоянно, до соответствующего максимального значения коэффициента увеличения объектива телевизионной камеры. Определяют смещения изображений крайних считывающих строк относительно центральной строки и определяют угол схождения, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса. Технический результат заключается в упрощении процесса получения и использования информации о смещениях изображений оптической мишени. 2 з.п. ф-лы, 2 ил., 1 табл.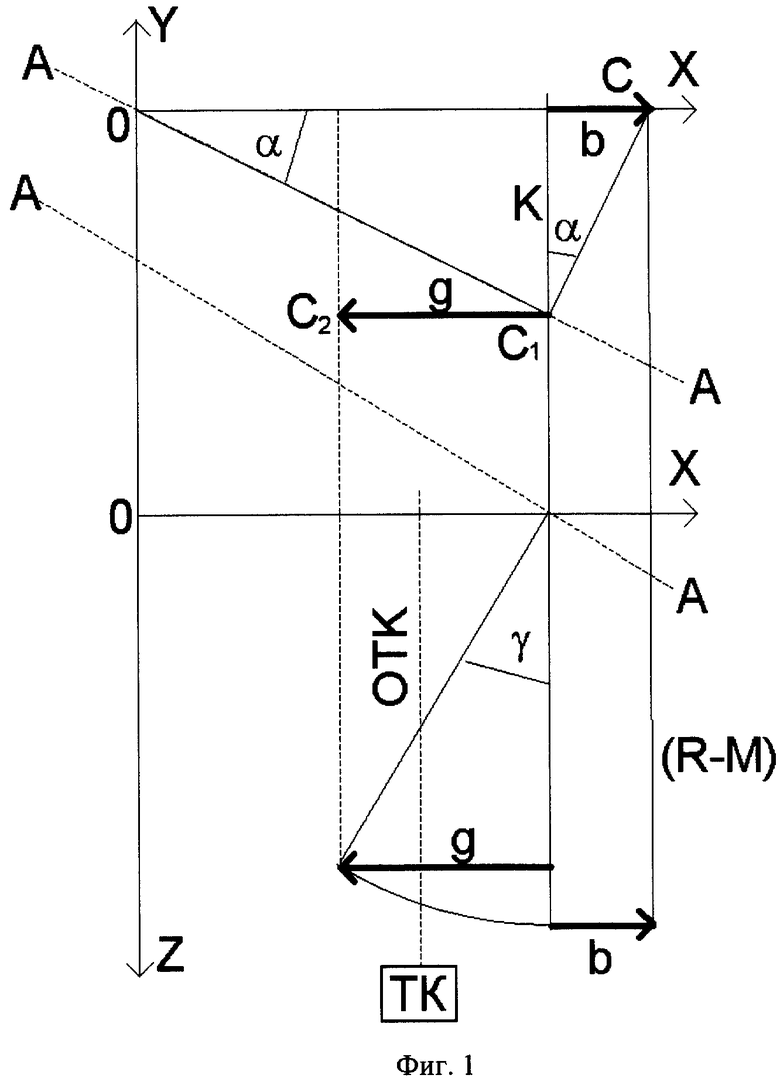
1. Способ регулировки углов установки колеса автомобиля, в котором устанавливают автомобиль продольной плоскостью параллельно оптической оси телевизионной камеры, монтируют на его колесо оптическую мишень с контрастным изображением, прокатывают автомобиль, например, на один оборот колеса в направлении телевизионной камеры, останавливают колесо автомобиля на заданном расстоянии от телевизионной камеры, для каждого положения колеса автомобиля считывают изображения оптической мишени телевизионной камерой, видеосигналы которой запоминают в ЭВМ, по ним определяют смещения изображений оптической мишени, с помощью которых вычисляют и регулируют углы установки колеса автомобиля, отличающийся тем, что оптическую мишень выполняют в виде круглого цилиндра, наносят на него случайное изображение, обладающее ортогональной изотропией, для каждого положения колеса автомобиля считывают изображения с помощью телевизионной камеры, например, тремя равноотстоящими строками, вычисляют с помощью ЭВМ функции взаимной корреляции запомненных видеосигналов крайних считывающих строк и крайних считывающих строк относительно центральной строки, определяют их экстремумы, по положениям которых определяют соответствующие смещения изображений оптической мишени, в процессе прокатывания автомобиля на каждом значении угла поворота колеса минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют смещение изображений крайних считывающих строк и по их отношению к расстоянию между крайними считывающими строками телевизионной камеры определяют сумму угла развала колеса и угла осевого биения колеса как функцию угла поворота колеса, по переменной составляющей которой определяют угол осевого биения колеса, а по постоянной составляющей определяют угол развала колеса, радиальное биение колеса находят по смещению телевизионной камеры, на заданном расстоянии колеса от телевизионной камеры минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса, увеличивают коэффициент увеличения объектива телевизионной камеры до тех пор, пока это значение угла развала колеса постоянно до соответствующего максимального значения коэффициента увеличения объектива телевизионной камеры, определяют смещения изображений крайних считывающих строк относительно центральной строки и определяют угол схождения, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса.
2. Способ по п.1, отличающийся тем, что на заданном расстоянии колеса от телевизионной камеры минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса, определяют смещения изображений крайних считывающих строк относительно центральной строки и определяют угол схождения как отношение половины суммы этих смещений к расстоянию между проекциями этих строк на оптическую мишень вдоль оптической оси телевизионной камеры, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса.
3. Способ по п.1, отличающийся тем, что на заданном расстоянии колеса от телевизионной камеры минимизируют сумму смещений изображений крайних считывающих строк относительно центральной строки перемещением телевизионной камеры, определяют отношение смещения изображений крайних считывающих строк к расстоянию между крайними считывающими строками телевизионной камеры и принимают его значение, при необходимости, за угол развала колеса, определяют смещения изображений крайних считывающих строк относительно центральной строки и определяют угол схождения как отношение суммы этих смещений к размеру между крайними строками телевизионной камеры, устанавливают рулевое колесо в исходное положение и регулируют угол схождения колеса.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ УСТАНОВКИ КОЛЕС И ПОЛОЖЕНИЯ ОСЕЙ И МОСТОВ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 1998 |
|
RU2223463C2 |
| СТЕНД ДЛЯ ЗАМЕРА УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС АВТОМОБИЛЯ | 0 |
|
SU299399A1 |
| ОПТИЧЕСКИЙ СТЕНД ДЛЯ КОНТРОЛЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2034261C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ (ИЗМЕРЕНИЯ) ПЛОТНОСТИ ЖИДКОЙ СРЕДЫ И ПЛОТНОМЕР ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2004 |
|
RU2270435C2 |

