Способ относится к области измерительной техники определения местоположения и курса воздушных транспортных средств и предназначен для использования в системах автоматической посадки беспилотных летательных аппаратов (БЛА) самолетного типа с возможностью дистанционного управления.
В большинстве своем все построенные и проектируемые БЛА снабжаются панорамной бортовой телевизионной камерой (ТК), предназначаемой для решения целевых задач, а также для дистанционного выполнения посадки наземным оператором.
Известен подход к решению задачи автоматической посадки с применением на борту БЛА телевизионного координатора на поворотной платформе с сервоприводом [1]. Оператор наземного пункта, выбрав предполагаемую точку посадки, совмещает с ней оптическую ось (ОО) координатора, который переключается при этом на режим слежения. Изображение подстилающей поверхности в тот момент запоминается и принимается как эталонное. Коррекция параметров движения ЛА осуществляется по сигналам рассогласования курса самолета и ВПП и углам линии визирования в вертикальной и боковой плоскостях (угла между проекциями продольной оси самолета и ОО на соответствующую плоскость). При таком подходе телевизионный координатор постоянно направлен на выбранный участок подстилающей поверхности, а вектор скорости ЛА совмещается с ОО.
К недостаткам такого подхода можно отнести следующее.
- Необходимость знания значения курсового угла ВПП, что означает проведение необходимых работ по подготовке площадки посадки.
- Погрешности определения курса ЛА приводят к соответствующим погрешностям захода на посадку.
- Ограничения на конструкцию ТК - предполагается ее установка на поворотной платформе сервоприводом, что связано с увеличением массы ТК.
Предлагаемый способ основан на использовании минимального набора средств на борту БЛА: инерциальной навигационной системы (ИНС), панорамной бортовой ТК, системы анализа и сопровождения элементов видеоизображения, бортовой цифровой вычислительной системы (БЦВС), высотомера малых высот, а также линии связи с наземным пунктом управления, имеющим в своем составе видеоконтрольное устройство оператора. Для измерения дальности до начала ВПП может использоваться лазерный дальномер.
Цель достигается тем, что информация с видеоизображения от ТК используется для определения: смещения ЛА от глиссады по вертикали, бокового отклонения от нее и дальности до начала ВПП.
1. Угловое положение линии визирования начала ВПП.
Пусть на видеоизображении опознается и отслеживается опорная точка (ОТ) для построения глиссады - точка на поверхности ВПП, отстоящая от расчетной точки приземления на расстояние, необходимое для выравнивания. Знание координат ОТ (условно - точки начала ВПП) на изображении позволяет восстановить орт направления на нее в системе координат, связанной с ТК. Указанный орт далее можно преобразовать в нормальную подвижную систему координат (НПСК) места ЛА, после чего углы положения линии визирования ОТ относительно горизонта и меридиана будут определены. Это преобразование может быть записано в виде:

где eg и ek - орты направления ОТ в НПСК и в системе координат, связанной с ТК, соответственно;
Mcg - матрица преобразования вектора из НПСК в систему координат ЛА;
Mkc - матрица преобразования вектора из системы координат ЛА в систему координат, связанную с ТК.
Матрица Mcg определяется значениями углов ЛА относительно НПСК от навигационной системы. Матрица Mkc определяется углами установки ТК на носителе (постоянными или меняющимися).
Знание текущего угла линии визирования ОТ относительно горизонта позволяет определять смещение ЛА от глиссады по вертикали и использовать его для удержания на глиссаде.
Описанный подход не требует установки ТК на носителе на подвесе, что способствует сокращению массы оборудования и расширяет возможности использования его на разработанных БЛА.
2. Дальность до начала ВПП.
В источнике [2] дальность до начала ВПП предлагается определять по видимому горизонтальному размеру специального маркера начала полосы. Для этого требуется подготовка площадки - разметка этого маркера на ее поверхности.
Если отказываться от подготовки площадки, для определения дальности до ОТ на больших удалениях возможно ее оценивание по связи вариаций поперечных координат ЛА с соответствующими вариациями углов положения линии визирования ОТ. Математическим аппаратом такого оценивания является метод динамической фильтрации. Текущие углы положения линии визирования ОТ определяются по ее координатам на видеоизображении.
Другим возможным способом определения дальности до ОТ на больших удалениях является применение лазерного дальномера, жестко установленного на ЛА, излучение которого направляется по текущей линии визирования начала ВПП системой отклоняющих дефлекторов.
На меньших удалениях, на которых высота подстилающей поверхности близка к высоте ВПП, следует использовать измерения высоты с помощью высотомера малых высот. Если текущий угол линии визирования ОТ относительно горизонта известен, то знание текущей высоты ЛА над уровнем ВПП позволяет контролировать удаление ЛА от ОТ.
3. Боковое отклонение ЛА от глиссады.
Если на оси ВПП, в ОТ, установить вертикальный шест, то угловое отклонение этого шеста от оси ВПП, видимое с приближающегося ЛА, может служить мерой бокового отклонения ЛА от глиссады (фиг.1). Учитывая, что положение местной вертикали на видеоизображении может быть восстановлено виртуально, изложенная образная картина приобретает практический смысл. Исследуем связь рассматриваемых параметров более подробно.
Возьмем систему координат ВПП Oxyz с началом в ОТ, ось Ох направлена по оси ВПП в направлении посадки, ось Oy направлена вверх по местной вертикали, ось Oz дополняет систему до правой.
Введем систему координат видеокамеры Oxkykzk, в которой ось Oxk направлена по оптической оси, а оси Oyk и Ozk располагаются соответственно по вертикали и горизонтали в плоскости изображения (поверхность сенсора). Пусть в условиях полета система координат видеокамеры повернута из исходного положения, в котором ее оси параллельны соответствующим осям системы Oxyz, последовательно по трем углам: на угол α вокруг оси Oyk (азимут), на угол η вокруг оси Ozk (угол места), на угол γ вокруг оптической оси Oxk. Будем предполагать, что в результате этих поворотов оптическая ось направлена в ОТ. Угол α, таким образом, есть азимутальный угол наблюдения ВПП; ему соответствует боковое отклонение ЛА от вертикальной плоскости, проходящей через ось ВПП.
Путем проектирования ортов из системы координат ВПП в систему координат ТК можно определить проекции ортов осей Ох и Oy ВПП на плоскость изображения Oykzk.
Элементы матрицы М из (1) для этих условий определяются согласно таблице 1.
Орту оси Ox ВПП на изображении соответствует двумерный вектор X с координатами

Орту оси Oy ВПП на изображении соответствует двумерный вектор Y с координатами

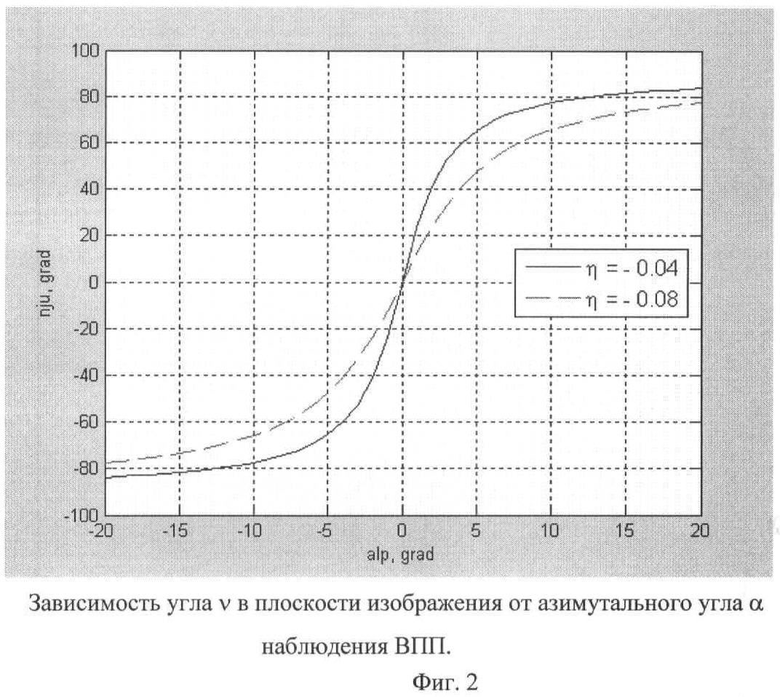
Эти результаты позволяют определить угол ν между векторами и зависимость этого угла от условий наблюдения, определяемых углами α, η, γ. Соответствующие выкладки приводят к простой формуле

На фиг.2 приведен график зависимости ν(α), рассчитанный для значений углов η (углы наклона глиссады), η=-0.04 рад и η=-0.08 рад.
Ввиду малости углов α и η в условиях посадки полученная формула может быть упрощена до вида

Ошибки такого упрощения для условий в диапазоне α (фиг.2) не превысят 0.005 рад по ν, 0.012 рад по α, т.е. незначимы для практики.
В приведенных построениях использована проекция на плоскость изображения местной вертикали, проходящей через ОТ. В условиях наблюдения ВПП с глиссады (под малыми углами относительно горизонта) угловые расхождения проекций на плоскость изображения местных вертикалей, проходящих через любую точку в окрестности ОТ, малы. Это позволяет упростить задачу, используя, например, для описанных геометрических построений проекцию местной вертикали, проходящей через оптическую ось камеры (т.е. ее проекцию, проходящую через центр поля изображения).
Углы α, η связаны с линейными параметрами: наклонной дальностью до ОТ D, высотой ЛА над плоскостью ВПП h, боковым отклонением ЛА от глиссады Sb соотношениями

Принимая во внимание ограниченность углов α, η, можно получить следующие формы соотношений для определения бокового отклонения ЛА Sb по величине наблюдаемого на изображении угла ν:

и

Форму (3) следует применять на больших удалениях в условиях, когда высоту ЛА над поверхностью ВПП оценить невозможно, а дальность D оценивается тем или иным способом. На меньших удалениях появляется возможность измерения высоты с помощью высотомера малых высот и соответственно применения формы (4). Важно учитывать, что последняя форма позволяет определять боковые отклонения от оси ВПП как при подходе, так и на пробеге по ВПП. В последнем случае высота h есть высота ТК над поверхностью ВПП в положении ЛА на шасси.
Данный подход к определению бокового отклонения от глиссады не требует знания курсового угла ВПП, а погрешности знания угла курса ЛА не влияют на точность захода на посадку.
При работе с предлагаемой системой оператор наземного пункта управления имеет изображение на видеоконтрольном устройстве, формируемое бортовой ТК, что позволяет ему выполнить распознавание ВПП - определить предполагаемую точку начала (ОТ) и оси ВПП. Оператор может указать положение этих ориентиров на изображении курсором (первая точка - ОТ, вторая - определяющая направление оси ВПП). Координаты выбранных точек передаются в систему анализа изображения с ТК. Получив эти координаты, система обработки изображения ТК осуществляет запоминание видеоконтрастных элементов в окрестностях указанных начала и оси ВПП (запоминание эталонов). Используя эти эталоны, система выполняет восстановление положения указанных ориентиров на последующих кадрах видеоизображения.
Текущее оцениваемое системой обработки изображения положение начала и оси ВПП может быть соответствующим образом представлено на видеоконтрольном устройстве оператора (наложено на изображение местности). Это позволит оператору контролировать ошибки восстановления этих ориентиров, возникающих в процессе посадки, и вносить коррекции при необходимости. Скорость коррекции координат ограничивается для исключения недопустимых динамических возмущений по параметрам движения ЛА.
В отличие от прямого пилотирования ЛА на участке посадки, возложение на оператора задач распознавания начала и оси ВПП не требует от него специальных навыков управления динамическим объектом конкретного типа. С другой стороны, исключение задачи распознавания ВПП на борту позволит существенно упростить решаемые там задачи обработки изображения. При этом возможности выполнения посадки на необорудованные площадки значительно расширяются.
Предлагаемое изобретение не требует непрерывной устойчивой связи по радиоканалу «борт - земля» на всем продолжении посадки, возможность применения посадки с использованием видеоизображения по метеоусловиям подтверждается данными источника [3], а именно вероятность появления облаков в обширной области умеренных широт не превышает: ниже высоты 500 м - 8%, ниже высоты 300 м - 2.5%.
Предлагаемый способ получения навигационной информации на борту может использоваться как единственный для обеспечения автоматической посадки, так и совмещаемый с применением спутниковой навигационной системы - с целью повышения точности и надежности системы посадки.
В настоящее время предложенный способ предполагается использовать на одном из изделий среднего класса беспилотных летательных аппаратов.
Источники информации, принятые во внимание
1. Патент РФ №2018785, кл. G01C 21/00. Система автоматической посадки летательных аппаратов;
2. И.М.Макаров, С.В.Манько. Интеллектуальная система управления автоматической посадкой беспилотного летательного аппарата на основе комплексного применения технологии нечеткой логики. Авиакосмическое приборостроение, №10, 2004.
3. И.П.Мазин. Облака и облачная атмосфера. Гидрометеоиздат, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2348981C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления | 1991 |
|
SU1836642A3 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
Изобретение относится к области измерительной техники и может быть использовано в системах автоматической посадки беспилотных летательных аппаратов (БЛА). Технический результат - повышение автономности, надежности, точности, уровня отказоустойчивости системы автоматической посадки, а также снижение требований по уровню подготовки оператора и расширение возможностей эксплуатации БЛА. Для достижения данного результата осуществляют формирование независимой системы получения и обработки навигационной информации по изображению со штатной бортовой стационарной панорамной телевизионной камеры (ТК). При этом осуществляют передачу в систему анализа изображения с ТК координат двух опорных точек - начала взлетно-посадочной полосы (ВПП) и произвольной точки ВПП, определяющей направление ее оси, запоминание видеоконтрастных элементов изображения в окрестностях указанных целей с восстановлением их положения на последующих кадрах. По видеоизображению с ТК определяется угловое положение линии визирования начала ВПП относительно линий горизонта и меридиана, а также с использованием высоты над поверхностью ВПП, боковое отклонение от глиссады. 3 з.п. ф-лы, 2 ил.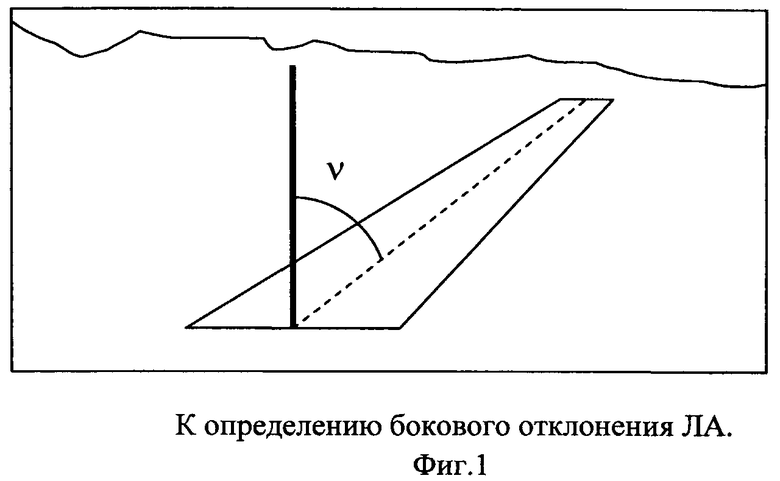
1. Способ получения навигационной информации для автоматической посадки беспилотных летательных аппаратов (БЛА) с использованием видеоизображения от бортовой панорамной телевизионной камеры, передаваемого по линии связи на видеоконтрольное устройство, расположенное на наземном пункте управления, отличающийся тем, что наземный оператор выполняет распознавание начала и оси взлетно-посадочной полосы (ВПП), указывает на видеоизображении курсором точку начала ВПП и вторую точку, определяющую вместе с первой положение оси ВПП, по координатам этих точек на борту запоминают эталоны изображения, производят автоматическое восстановление положения начала и оси ВПП на последующих кадрах изображения, по координатам начала ВПП на изображении, угловому положению телевизионной камеры на БЛА, угловому положению БЛА в нормальной подвижной системе координат определяют угловое положение линии визирования начала ВПП относительно горизонта и меридиана, по углу между осью ВПП на изображении и восстановленной на нем местной вертикалью и по высоте над поверхностью ВПП определяют боковое отклонение от глиссады, в том числе на пробеге по ВПП.
2. Способ получения навигационной информации для автоматической посадки БЛА по п.1, отличающийся тем, что текущую дальность до начала ВПП определяют на борту по соотношению вариаций поперечных координат БЛА и соответствующих вариаций углов положения линии визирования начала ВПП, а по дальности до начала ВПП и по углу наклона линии визирования начала ВПП к горизонту определяют высоту над поверхностью ВПП.
3. Способ получения навигационной информации для автоматической посадки БЛА по п.1, отличающийся тем, что текущую дальность до начала ВПП определяют на борту с помощью лазерного дальномера, излучение которого направляется по текущей линии визирования начала ВПП системой отклоняющих дефлекторов, а по дальности до начала ВПП и по углу наклона линии визирования начала ВПП к горизонту определяют высоту над поверхностью ВПП.
4. Способ получения навигационной информации для автоматической посадки БЛА по п.1, отличающийся тем, что оцениваемое на борту текущее положение начала и оси ВПП на видеоизображении индицируют на видеоконтрольном устройстве наземного оператора, а оператору предоставляют возможность коррекции этих ориентиров в ходе посадки путем выполнения предусмотренных воздействий на органы управления.
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| ТОПЛИВНАЯ КОМПОЗИЦИЯ | 2000 |
|
RU2154665C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1991 |
|
RU1823356C |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СОЕДИНИТЕЛЬНЫЙ ЗАЖИМ КОМБИНИРОВАННОГО ТИПА | 2004 |
|
RU2272343C1 |

