Текст описания представлен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА АНАЛИЗА ВНЕШНЕЙ ОБСТАНОВКИ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ | 2019 |
|
RU2735559C1 |
| СПОСОБ И СИСТЕМА ОТОБРАЖЕНИЯ МАСШТАБНЫХ СЦЕН В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2015 |
|
RU2606875C2 |
| МОДУЛЬНЫЙ КОМПЛЕКС КОНТРОЛЯ ПРОИЗВОДСТВЕННОЙ БЕЗОПАСНОСТИ И ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2020 |
|
RU2746652C1 |
| ТЕЛЕВИЗИОННЫЙ МНОГОРАКУРСНЫЙ СПОСОБ ПОЛУЧЕНИЯ, ПЕРЕДАЧИ И ПРИЕМА СТЕРЕОИНФОРМАЦИИ О НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ С ЕГО АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ. СИСТЕМА "ТРЕТИЙ ГЛАЗ" | 2013 |
|
RU2543549C2 |
| СПОСОБ ПОЛУЧЕНИЯ СТЕРЕОСКОПИЧЕСКИХ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ С АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ ПРЕДМЕТНОГО ПРОСТРАНСТВА В РЕАЛЬНОМ ВРЕМЕНИ | 2012 |
|
RU2490819C1 |
| РАСПРЕДЕЛЕННАЯ АРХИТЕКТУРА СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2554102C2 |
| СЧЕТЧИК ПОДСЧЕТА ПАССАЖИРОВ НА БАЗЕ СТЕРЕОЗРЕНИЯ | 2022 |
|
RU2785198C1 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
| СПОСОБ И СИСТЕМА ОТОБРАЖЕНИЯ ДАННЫХ С ВИДЕОКАМЕРЫ | 2018 |
|
RU2679200C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ОПТОЭЛЕКТРОННЫХ УСТРОЙСТВ | 2011 |
|
RU2484438C1 |

Изобретение относится к области ввода в ЭВМ системы слежения информации об объекте наблюдения и предназначено для задания начальных условий для автоматического определения координат объектов в результате обработки и анализа данных изображения этих объектов по последовательности телевизионных и/или тепловизионных изображений. Техническим результатом является повышение достоверности ввода в ЭВМ информации о выбираемом объекте наблюдения, повышение надежности дальнейшего автоматического слежения за объектом наблюдения при заданных временных ограничениях на ввод информации об объекте наблюдения. Каждое из устройств обработки входных данных, полученных от видеокамеры системы слежения, для ввода в ЭВМ системы слежения информации об объекте наблюдения, содержит блок инициализации, синхронизации и приема видеоданных, блок обнаружения, идентификации и определения характеристик сегментов изображения, блок определения важности и ранжирования сегментов изображения, блок формирования изображений на дисплее оператора, блок взаимодействия с оператором и ЭВМ системы слежения. Способы описывают работу указанных устройств. 4 н. и 7 з.п. ф-лы, 12 ил.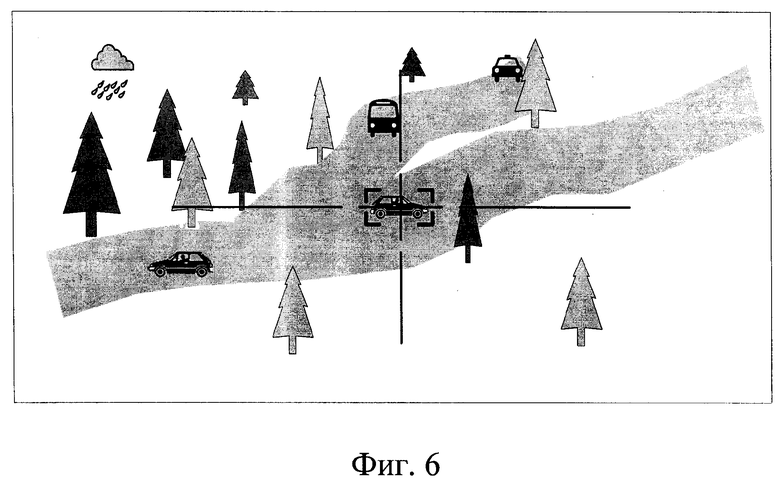
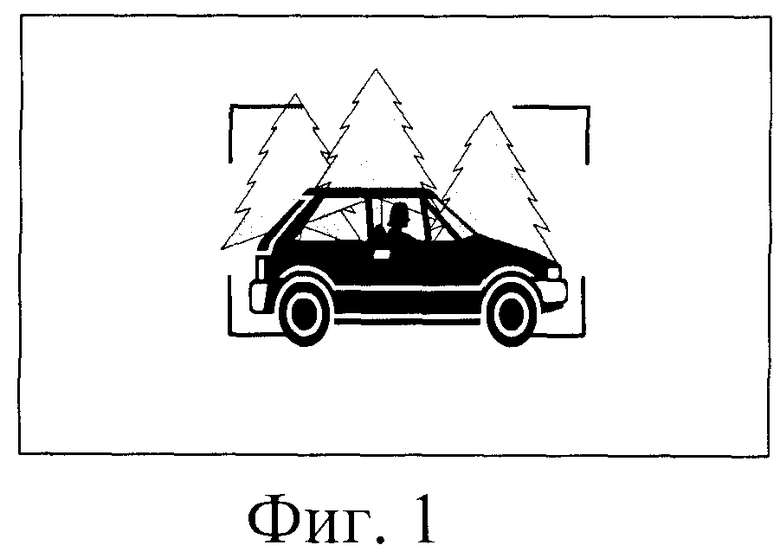
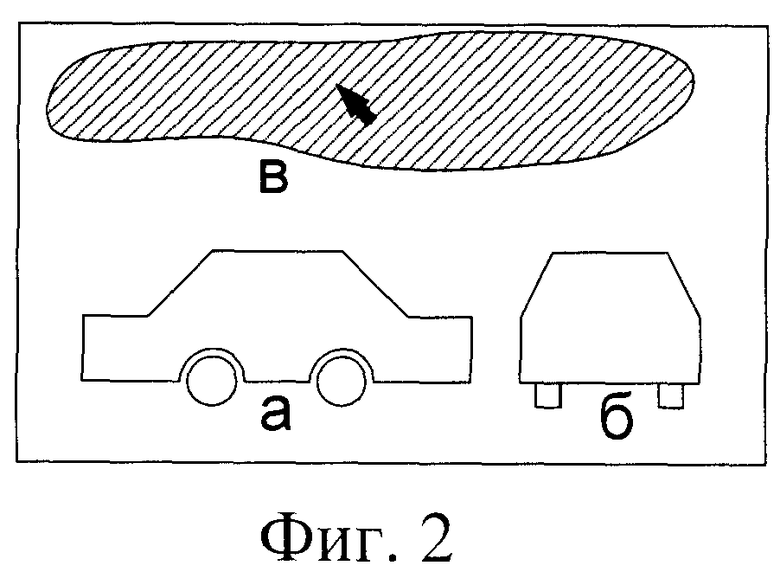
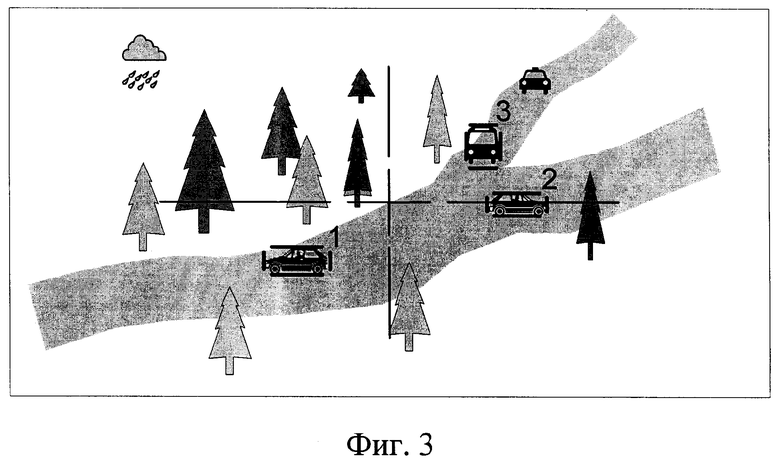
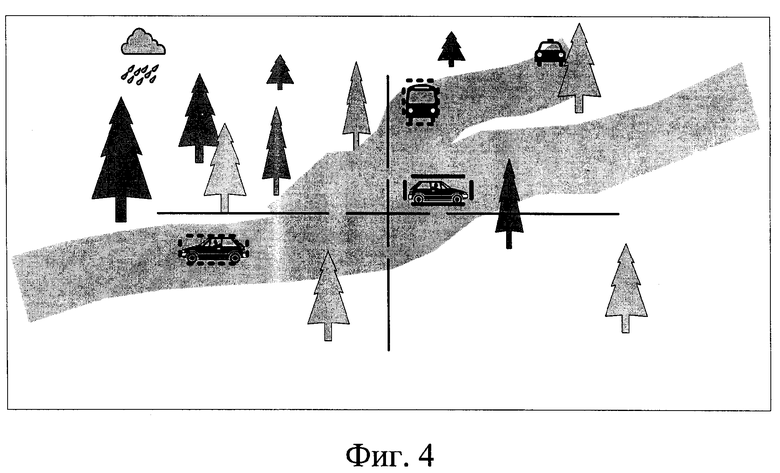
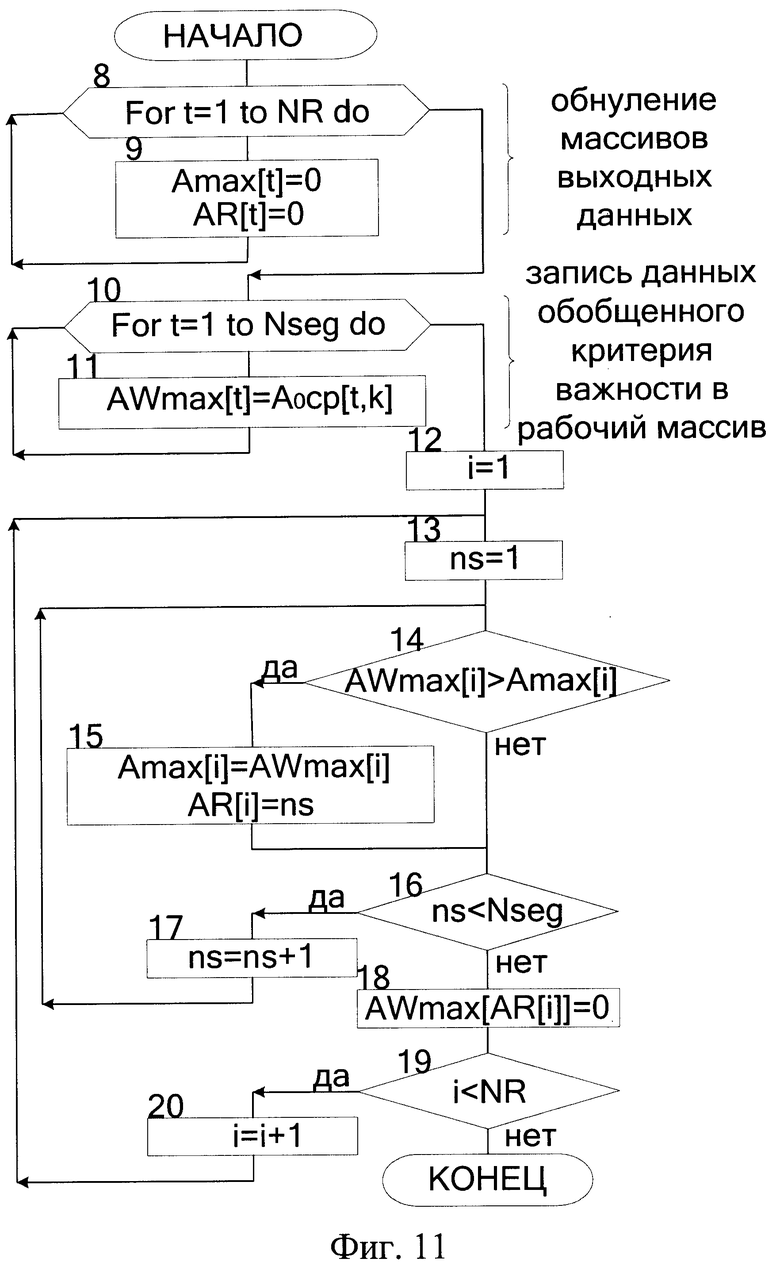
1. Способ обработки входных данных, полученных от видеокамеры системы слежения, для ввода в ЭВМ системы слежения информации об объекте наблюдения, заключающийся, по меньшей мере, в приеме от видеокамеры системы слежения и отображении на дисплее оператора телевизионных сигналов последовательности кадров тепло- и/или телевизионных изображений наблюдаемой сцены, представленных в цифровой форме, и выдаче команды завершения ввода информации об объекте наблюдения, отличающийся тем, что после приема от видеокамеры системы слежения телевизионных сигналов текущего кадра последовательности кадров тепло- и/или телевизионных изображений наблюдаемой сцены, представленных в цифровой форме, и до выдачи команды завершения ввода информации об объекте наблюдения, обнаруживают в каждом текущем кадре принятой последовательности тепло- и/или телевизионных изображений наблюдаемой сцены сегменты изображений потенциально возможных объектов наблюдения в виде совокупностей топологически связных точек изображения, соответствующих заданному критерию, определяют координаты их границ, определяют и запоминают характеристики обнаруженных сегментов изображений потенциально возможных объектов наблюдения и сохраняют их для использования в течение времени смены N кадров принятой последовательности тепло- и/или телевизионных изображений наблюдаемой сцены, причем, например, N=3, 4, 5, …, 40, определяют и анализируют траектории изменения запомненных характеристик обнаруженных сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров на основе, например, завязывания траекторий характеристик впервые обнаруженных или не идентифицированных с ранее завязанными траекториями сегментов изображений потенциально возможных объектов наблюдения, сглаживания (фильтрации), экстраполяции (прогнозировании) и отбрасывания траекторий; идентифицируют сегменты изображений потенциально возможных объектов наблюдения в последовательности кадров на основе проведенного анализа траекторий изменения запомненных характеристик обнаруженных сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров, определяют относительную частоту обнаружения сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров, прогнозируют характеристики сегментов изображений потенциально возможных объектов наблюдения на следующий кадр, определяют погрешность прогнозирования характеристик сегментов изображений потенциально возможных объектов наблюдения в текущем кадре, определяют усредненные характеристики сегментов изображений потенциально возможных объектов наблюдения, причем длина последовательности кадров, по которой определяют усредненные характеристики сегментов изображений потенциально возможных объектов наблюдения, может составить, например, N=3, 4, 5, …, 40, производят отбрасывание части завязанных траекторий характеристик сегментов изображений потенциально возможных объектов наблюдения, не удовлетворяющих заданным ограничениям, производят отбор сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, для отобранных сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, определяют соответствующие им значения A0(ns) обобщенного критерия важности сегментов, где ns - номер сегмента, которые усредняют (фильтруют) по последовательности кадров, длина которой может составлять, например, N=3, 4, 5, …, 40, ранжируют отобранные сегменты изображений потенциально возможных объектов наблюдения на основе упорядочивания по убыванию (возрастанию) усредненных (отфильтрованных) значений A0cp(ns) обобщенного критерия важности сегментов, присваивая сегменту с максимальным значением A0cp(ns1) наивысший ранг R(ns1)=1 и далее другим сегментам в порядке убывания значений A0cp(ns) значения рангов R(i,ns)=2, 3…, отображают на дисплее оператора на фоне принятого текущего кадра тепло- и/или телевизионных изображений наблюдаемой сцены границы отобранных сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, или связанные с ними метки, отображающие положение отобранных сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, отображают на дисплее оператора в непосредственной близости от границ или меток сегментов потенциально возможных объектов наблюдения соответствующие им ранги сегментов изображений потенциально возможных объектов наблюдения, выбирают один из сегментов изображений объектов, выделенных на дисплее оператора соответствующим рангом, присваивают всем элементам изображения, находящимся внутри границ выбранного оператором сегмента изображения объекта наблюдения, признак принадлежности данному объекту наблюдения.
2. Способ по п.1, отличающийся тем, что определение значений обобщенного критерия важности сегментов изображения производят с помощью вычисления значений функции, монотонно зависящей от частных критериев важности (характеристик) сегментов, конкретный вид которой выбирают в зависимости от задачи, решаемой оператором и системой слежения в целом, например,

где А(1,ns) - средняя яркость сегмента,
А(2,ns) - относительная частота обнаружения сегмента,
А(3,ns) - среднеквадратическая ошибка прогнозирования координат сегмента,
с1, с2, с3 - константы, определяющие вес частных критериев важности в обобщенном критерии A0(ns).
3. Способ по п.1, отличающийся тем, что выбирают один из сегментов изображений потенциально возможных объектов наблюдения, выделенных на дисплее оператора границами, метками и/или рангом изображений объектов, вводом в ЭВМ сигнала ранга выбранного оператором изображения объекта наблюдения.
4. Способ по п.1, отличающийся тем, что выбирают один из сегментов изображений потенциально возможных объектов наблюдения, выделенных на дисплее оператора границами, метками и/или рангом изображений объектов наблюдения, подведением координатной метки, управляемой от пульта оператора и отображаемой на дисплее оператора, к выбираемому оператором изображению объекта наблюдения.
5. Способ по п.1, отличающийся тем, что количество сегментов, границы или метки которых отображают на дисплее оператора, ограничивают, например, введением ограничения на максимальное расстояние центра маркируемого меткой сегмента от центра кадра.
6. Способ по п.1, отличающийся тем, что количество сегментов, границы, метки и/или ранги которых отображают на дисплее оператора, ограничивают, например, числом присваиваемых рангов.
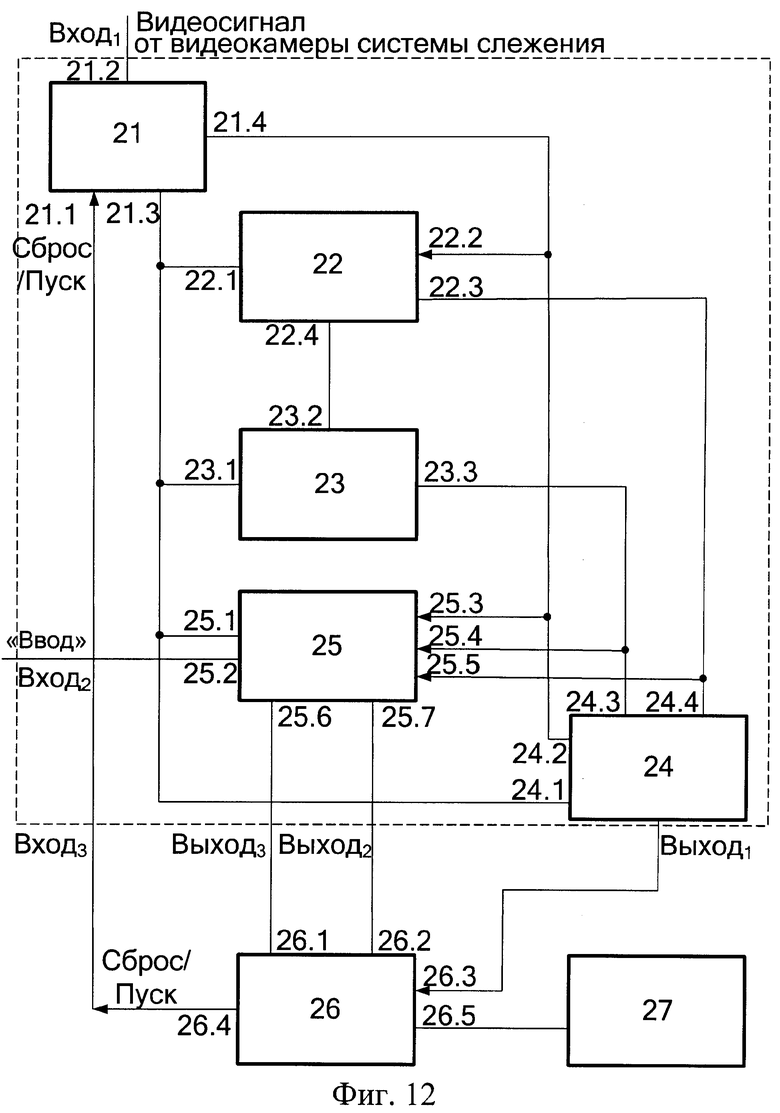
7. Устройство обработки входных данных, полученных от видеокамеры системы слежения, для ввода в ЭВМ системы слежения информации об объекте наблюдения, содержащее, по меньшей мере, блок инициализации, синхронизации и приема видеоданных системы, отличающееся тем, что оно дополнительно содержит, по меньшей мере, блок обнаружения, идентификации и определения характеристик сегментов изображения, предназначенный для обнаружения в текущем k - м кадре сегментов топологически связанных элементов изображения с заданными свойствами, определения характеристик сегментов, идентификации одноименных сегментов изображения в последовательности кадров, фильтрации и прогнозирования характеристик сегментов, отбора сегментов, характеристики которых удовлетворяют заданным ограничениям, блок определения важности и ранжирования сегментов изображения, предназначенный для определения и фильтрации значений обобщенного критерия важности отобранных сегментов, а также их ранжирования по убыванию (возрастанию) значений обобщенного критерия важности сегментов, блок взаимодействия с оператором и ЭВМ системы слежения, предназначенный для приема сигналов номера ранга сегмента, выбранного оператором, команды «Ввод» - завершения ввода информации об объекте наблюдения, формирования и выдачи в ЭВМ системы слежения видеоданных текущего кадра изображения, списка данных, идентифицирующих элементы изображения сегмента, выбранного оператором, характеристик сегмента, выбранного оператором, а также команды «Ввод» - завершения ввода информации об объекте наблюдения, блок формирования изображений на дисплее оператора, причем первый вход устройства соединен со вторым входом блока инициализации, синхронизации и приема видеоданных, первый выход которого соединен с первыми входами остальных блоков, первый вход блока инициализации, синхронизации и приема видеоданных соединен с третьим входом устройства, а второй выход блока инициализации, синхронизации и приема видеоданных соединен со вторыми входами блока обнаружения, идентификации и определения характеристик сегментов и блока формирования изображений на дисплее оператора и с третьим входом блока взаимодействия с оператором и ЭВМ системы слежения, второй вход которого соединен со вторым входом устройства, первый выход которого соединен с выходом блока формирования изображений на дисплее оператора, третий вход которого соединен с выходом блока определения важности и ранжирования сегментов, а четвертый - с первым выходом блока обнаружения, идентификации и определения характеристик сегментов, второй выход которого соединен со вторым входом блока определения важности и ранжирования сегментов, четвертый вход блока взаимодействия с оператором и ЭВМ системы слежения соединен с выходом блока определения важности и ранжирования сегментов, а пятый - с первым выходом блока обнаружения, идентификации и определения характеристик сегментов, первый и второй выходы блока взаимодействия с оператором и ЭВМ системы слежения соединены с третьим и вторым выходами устройства.
8. Способ обработки входных данных, полученных от видеокамеры системы слежения, для ввода в ЭВМ системы слежения информации об объекте наблюдения, заключающийся, по меньшей мере, в приеме от видеокамеры системы слежения и отображении на дисплее оператора телевизионных сигналов последовательности кадров тепло- и/или телевизионных изображений наблюдаемой сцены, представленных в цифровой форме и выдаче команды завершения ввода информации об объекте наблюдения, отличающийся тем, что после приема от видеокамеры системы слежения телевизионных сигналов текущего кадра последовательности кадров тепло- и/или телевизионных изображений наблюдаемой сцены, представленных в цифровой форме, и до выдачи команды завершения ввода информации об объекте наблюдения, обнаруживают в каждом текущем кадре принятой последовательности тепло- и/или телевизионных изображений наблюдаемой сцены сегменты изображений потенциально возможных объектов наблюдения в виде совокупностей топологически связных точек изображения, соответствующих заданному критерию, определяют координаты их границ, определяют и запоминают характеристики обнаруженных сегментов изображений потенциально возможных объектов наблюдения и сохраняют их для использования в течение времени смены N кадров принятой последовательности тепло- и/или телевизионных изображений наблюдаемой сцены, причем, например, N=3, 4, 5, …, 40, определяют и анализируют траектории изменения запомненных характеристик обнаруженных сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров на основе, например, завязывания траекторий характеристик впервые обнаруженных или не идентифицированных с ранее завязанными траекториями сегментов изображений потенциально возможных объектов наблюдения, сглаживания (фильтрации), экстраполяции (прогнозировании) и отбрасывания траекторий; идентифицируют сегменты изображений потенциально возможных объектов наблюдения в последовательности кадров на основе проведенного анализа траекторий изменения запомненных характеристик обнаруженных сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров, определяют относительную частоту обнаружения сегментов изображений потенциально возможных объектов наблюдения в последовательности кадров, прогнозируют характеристики сегментов изображений потенциально возможных объектов наблюдения на следующий кадр, определяют погрешность прогнозирования характеристик сегментов изображений потенциально возможных объектов наблюдения в текущем кадре, определяют усредненные характеристики сегментов изображений потенциально возможных объектов наблюдения, причем длина последовательности кадров, по которой определяют усредненные характеристики сегментов изображений потенциально возможных объектов наблюдения, может составить, например, N - 3, 4, 5, …, 40, производят отбрасывание части завязанных траекторий характеристик сегментов изображений потенциально возможных объектов наблюдения, не удовлетворяющих заданным ограничениям, производят отбор сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, отображают на дисплее оператора на фоне принятого текущего кадра тепло- и/или телевизионных изображений наблюдаемой сцены границы отобранных сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, или связанные с ними метки, отображающие положение отобранных сегментов изображений потенциально возможных объектов наблюдения, обладающих заданными свойствами, выбирают один из сегментов изображений объектов, выделенных на дисплее оператора границами или метками, присваивают всем элементам изображения, находящимся внутри границ выбранного оператором сегмента изображения объекта наблюдения, признак принадлежности данному объекту наблюдения.
9. Способ по п.8, отличающийся тем, что выбирают один из сегментов изображений потенциально возможных объектов наблюдения, выделенных на дисплее оператора границами или метками, подведением координатной метки, управляемой от пульта оператора и отображаемой на дисплее оператора, к выбираемому оператором изображению объекта наблюдения.
10. Способ по п.8, отличающийся тем, что количество сегментов, границы или метки которых отображают на дисплее оператора, ограничивают, например, введением ограничения на максимальное расстояние центра маркируемого меткой сегмента от центра кадра.
11. Устройство обработки входных данных, полученных от видеокамеры системы слежения, для ввода в ЭВМ системы слежения информации об объекте наблюдения, содержащее, по меньшей мере, блок инициализации, синхронизации и приема видеоданных системы, отличающееся тем, что содержит, по меньшей мере, блок обнаружения, идентификации и определения характеристик сегментов изображения, предназначенный для обнаружения в текущем k-м кадре сегментов топологически связанных элементов изображения с заданными свойствами, определения характеристик сегментов, идентификации одноименных сегментов изображения в последовательности кадров, фильтрации и прогнозирования характеристик сегментов, отбора сегментов, характеристики которых удовлетворяют заданным ограничениям, блок отбора сегментов изображения для отображения, предназначенный для формирования списка сегментов, информация о которых выводится на дисплей оператора, и передачи параметров этих сегментов в блоки формирования изображений на дисплее оператора и взаимодействия с оператором и ЭВМ системы слежения, блок взаимодействия с оператором и ЭВМ системы слежения, предназначенный для приема сигналов команды «Ввод» - завершения ввода информации об объекте наблюдения, формирования и выдачи в ЭВМ системы слежения видеоданных текущего кадра изображения, списка данных, идентифицирующих элементы изображения сегмента, выбранного оператором, характеристик сегмента, выбранного оператором, блок формирования изображений на дисплее оператора, причем первый вход устройства ввода в ЭВМ информации об объекте наблюдения соединен со вторым входом блока инициализации, синхронизации и приема видеоданных, первый выход которого соединен с первыми входами остальных блоков устройства ввода в ЭВМ информации об объекте наблюдения, первый вход блока инициализации, синхронизации и приема видеоданных соединен с третьим входом устройства ввода в ЭВМ информации об объекте наблюдения, а второй выход блока инициализации, синхронизации и приема видеоданных соединен со вторыми входами блока обнаружения, идентификации и определения характеристик сегментов и блока формирования изображений на дисплее оператора и с третьим входом блока взаимодействия с оператором и ЭВМ системы слежения, второй вход которого соединен со вторым входом устройства ввода в ЭВМ информации об объекте наблюдения, первый выход которого соединен с выходом блока формирования изображений на дисплее оператора, третий вход которого соединен с выходом блока отбора сегментов для отображения, а четвертый - с первым выходом блока обнаружения, идентификации и определения характеристик сегментов, второй выход которого соединен со вторым входом блока отбора сегментов для отображения, четвертый вход блока взаимодействия с оператором и ЭВМ системы слежения соединен с выходом блока отбора сегментов для отображения, а пятый - с первым выходом блока обнаружения, идентификации и определения характеристик сегментов, первый и второй выходы блока взаимодействия с оператором и ЭВМ системы слежения соединены с третьим и вторым выходами устройства ввода в ЭВМ информации об объекте наблюдения.
| US 4286289, 25.08.1981 | |||
| СИСТЕМА ОХРАНЫ И НАБЛЮДЕНИЯ | 1998 |
|
RU2120139C1 |
| Капельница | 1983 |
|
SU1109091A1 |
| US 5937079 A, 10.08.1999 | |||
| Способ получения ароматических углеводородов | 1939 |
|
SU58762A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2103744C1 |
| ФАРИНА А | |||
| и др | |||
| Цифровая обработка радиолокационной информации | |||
| Сопровождение целей | |||
| - М.: Радио и связь, 1993, разделы 1.1.3, 2, 3.5, 3.6, с.25-30, 67-201. | |||

