Изобретение относится к комплексным охранным системам, способным проводить видеонаблюдение за охраняемой территорией с использованием видео и тепловизионной аппаратуры дальнего обзора, привязанной к электронной карте охраняемой местности и срабатывающей по сигналам от сенсоров охранной системы с целью предупреждения попыток наземного или воздушного проникновения на охраняемую территорию, что может быть использовано в комплексной защите охраняемого периметра от несанкционированного доступа физических лиц, техники, животных и т.п., в том числе для охраны протяженных участков государственной границы.
В настоящее время для защиты протяженных объектов, в том числе государственной границы, используются различные системы охраны, позволяющие не только задержать на определенное время нарушителя, но и передать на пост охраны координаты того места, где произошла попытка несанкционированного проникновения, причем негласно для нарушителя. Указанные системы сигнализации могут быть полностью автономными и предусматривать различные комбинации сенсоров, которые позволяют каким-либо примитивным образом (по массе, скорости или изменению физических характеристик) идентифицировать нарушителя. Однако указанные алгоритмы распознавания малодостоверны, поэтому велика вероятность появления «ложной тревоги», что не отменяет выезд на место группы захвата. Наиболее частой причиной срабатывания сенсоров являются животные, на которые сенсоры реагируют. Для исключения выездов группы захвата на места срабатывания сенсоров по «ложным тревогам» охранные системы должны дополняться средствами видеоконтроля, способными с большой дальности (до 10 км) просматривать любое место на охраняемой территории на предмет реальной угрозы проникновения.
К комплексу технического наблюдения, позволяющему проводить контроль охраняемой территории, должны быть предъявлены следующие жесткие требования.
Во-первых, комплекс должен иметь возможность осуществлять наблюдение контролируемой местности круглосуточно и круглогодично, в том числе независимо от состояния текущих погодных условий (снегопада, дождя, тумана и т.п.).
Во-вторых, комплекс должен иметь возможность осуществлять быструю и точную наводку на ту точку местности, в которой сработал сенсор сигнализации.
В-третьих, комплекс должен иметь возможность функционировать как в автоматическом, так и в ручном режиме наведения. Вся получаемая информация о нарушителе должна передаваться на пост охраны для контроля оператором, который должен иметь возможность в ручном режиме отслеживать нарушителя, а полученную видеоинформацию сохранять в архиве нарушений.
В-четвертых, комплекс должен иметь возможность быстрого изменения конфигурации, то есть добавления или перемещение сенсоров, расположенных в зоне его действия, что позволит повысить надежность системы охраны и быстро реагировать на изменение ситуации в охраняемой зоне.
В-пятых, комплекс должен иметь возможность визуального контроля за мобильными группами, действующими в зоне его ответственности и имеющими при себе автоматические средства определения координат и передачи их по радиоканалу на пульт оператора, что позволит идентифицировать мобильные группы и скоординировать их действия, например, по захвату нарушителя.
Известна система видеомониторинга леса, содержащая высотное сооружение и размещенное на высотном сооружении оборудование, включающее видеокамеру на поворотном устройстве и устройство управления видеокамерой, выполненное с возможностью определять текущую пространственную ориентацию видеокамеры в собственной системе координат видеокамеры (см. патент РФ №2458407, кл. G08B 25/10, 2012 г.).
Система позволяет вести наблюдение за пожарным состоянием лесов на довольно большом расстоянии (до нескольких десятков километров) от места расположения системы в ручном и автоматическом режимах. За счет возможности определения текущей ориентации камеры наблюдения система позволяет указать направление на очаг пожара и фактически определить его координаты (во взаимодействии с такими же системами) на картах и планах местности.
Однако в ночное время суток система может зарегистрировать только очаги с высокой яркостью в видимом диапазоне спектра. Кроме того, в плохую погоду (туман, дождь, снег и т.п.) наблюдение в видимом диапазоне спектра сильно затруднено и дальность действия системы сильно уменьшается.
Кроме того, время необходимое на просмотр всей, доступной камере, площади леса достаточно велико. Из-за этого система может уверенно регистрировать только большие и медленно перемещающиеся объекты типа очага возгорания или фронт пожара.
Известен мобильный комплекс технических средств охраны, содержащий пункт управления и периметровую охранную систему, состоящую из периметровых средств обнаружения и периметровых оптикоэлектронных средств наблюдения, включающих средства объемно-кругового обзора на основе телевизионной и тепловизионной аппаратуры с поисковым прожектором (см. патент РФ №2427039, кл. G08B 13/19, 2011 г.).
Известный мобильный комплекс предназначен в основном для охраны огороженных замкнутых территорий (военный склад, закрытый ангар, подземный завод и т.п.). Для охраны протяженных объектов (участок границы) такой комплекс мало подходит, т.к. зону обнаружения размером порядка 10 километров невозможно просмотреть «средствами объемно-кругового обзора» за разумное время. Скорость перемещения нарушителя такова, что время пересечения им видеокадра много меньше полного времени просмотра зоны обнаружения. Соответственно вероятность попадания нарушителя в кадр крайне мала (ниже приведена экспертная оценки этой вероятности). Имеющиеся в составе комплекса периметровые средства обнаружения и средства объемно-кругового обзора на основе телевизионной и тепловизионной аппаратуры с поисковым прожектором не имеют привязки к какой-нибудь общей системе координат. Поэтому наведение платформы с телевизионной и тепловизионной аппаратурой на каждое средство обнаружения осуществляется вручную и, соответственно, занимает много времени, что ставит под сомнение даже «мобильность» комплекса. Работа же платформы с телевизионной и тепловизионной аппаратурой как независимого средства обнаружения имеет крайне низкое быстродействие и поэтому не способно обнаруживать нарушителя с приемлемой вероятностью.
Для примера рассмотрим работу поста наблюдения с дальностью действия 6 км. В таком случае периметр, за которым камере необходимо наблюдать, составляет 2π·6=37,7 км. Для того чтобы оператор поста наблюдения на рабочем месте смог распознать человека в кадре, размер кадра на местности должен быть не более 70 метров. Соответственно, чтобы просмотреть весь периметр оператору потребуется просмотреть 37,7 км / 70 м = 538 кадров (не менее). Если предположить, что оператор потратит на изучение каждого кадра не более 30 секунд (что очень мало для обнаружения и надежной оценке угрозы), то на просмотр всего периметра он должен затратить 30 сек ·538 кадров = 4,5 часа. За такое время пешеход проходит около 9 км по пересеченной местности. Поэтому заметить его при таком способе обнаружения, не имея априорной информации, можно только случайно.
Наиболее близким к заявляемому техническому решению по технической сути является выбранный в качестве прототипа пункт технического наблюдения (см. патент РФ №128753, кл. G08B 13/00, 2013 г.), включающий мачту с установленной системой видеонаблюдения в составе видеокамеры дальнего обзора и тепловизора, размещенных на поворотной платформе, а также систему приема и передачи данных по радиоканалу связи с пультом оператора.
Основным недостатком указанной системы является ее функциональная ограниченность, что не позволяет обнаруживать быстро перемещающегося нарушителя. Как показывает вышеприведенный экспертный расчет, дальнодействующая система наблюдения как средство обнаружения нарушителя абсолютно бесполезна без предварительного точного указания направления на нарушителя и поймать его в кадр практически невозможно.
Другим недостатком известной системы является сложность указания углов поворотной платформы для направления камер наблюдения на выделенные (наиболее опасные в смысле попыток несанкционированного проникновения) места на местности. Пользуясь известной системой необходимо ориентировать пост наблюдения по ориентирам на местности с последующим запоминанием углов поворотной платформы. Если ориентиры имеются, то они находятся визуально в режиме ручного управления поворотной платформой. В противном случае необходимо посылать человека для искусственного создания ориентира (заметим, что дальность действия системы порядка 10 км и доступность некоторых мест может быть затруднена, что потребует значительных временных затрат).
Задачей, решаемой заявляемым техническим решением, является устранение указанных недостатков, а именно расширение функциональных возможностей устройства за счет обеспечения координатной привязки известной системы видеонаблюдения к конкретной местности со всем размещенным там оборудованием охранной сигнализации, также имеющим координатную привязку к местности, что позволит гарантированно поймать в кадр нарушителя, вызвавшего тревожное сообщение от любого датчика охранной сигнализации, расположенного в зоне ее ответственности.
Указанная задача в комплексе технического наблюдения за охраняемой территорией, включающем пульт оператора, соединенный каналом связи с мачтой, на которой установлена размещенная на поворотной платформе система дальнего обзора местности в составе видеокамеры и тепловизора, решена тем, что поворотная платформа оснащена системой координатного позиционирования, которая привязана к локальной или к географической системе координат, а пульт оператора соединен каналами связи с датчиками охранной сигнализации, расположенными на охраняемой территории и имеющими индивидуальную привязку к той же локальной или к географической системе координат.
Указанное исполнение комплекса практически в реальном времени позволяет по сигналам с датчиков охранной сигнализации наводить систему дальнего обзора при помощи поворотной платформы на место с координатами, переданными в тревожном сообщении от датчика, при этом пост наблюдения с минимальной задержкой может показывать тепловизионную и/или видеокартинку с места события. За время реакции комплекса (менее 5 секунд) даже нарушитель типа «автотранспортного средство», переместится не более чем на 50 метров, т.е. останется в кадре.
Для расширения функциональных возможностей комплекса пульт оператора выполнен на базе стационарного или мобильного пункта управления и связи и снабжен многозадачным вычислительным устройством с источником бесперебойного питания и накопителем видеоинформации, что позволяет ему круглосуточно и в любое время года зафиксировать информационные события, вызванные срабатыванием датчиков на любом участке охраняемой территории.
Для повышения информативности комплекса вычислительное устройство пульта оператора снабжено блоком памяти с цифровой картой или планом местности в 2D или 3D формате, а каждый датчик охранной сигнализации снабжен автономным GPS-приемником, соединенным по каналу связи с пультом оператора, при этом в качестве каналов связи использованы радиоканалы и/или оптические каналы и/или кабельные каналы связи.
В качестве устройства индивидуальной привязки датчика охранной сигнализации к локальной или к географической системе координат использован модуль идентификации абонента с предварительно записанными координатами датчика.
Для точного позиционирования поворотной платформы, она снабжена автономным вычислительным устройством, в блок памяти которого занесена цифровая карта или план местности в 2D или 3D формате. Наведение курсором на точку на экране монитора автоматически позиционирует поворотную платформу на указанное место на цифровой карте или плане местности в 2D или 3D формате.
Таким образом, заявляемый комплекс за счет привязки поворотной платформы системы дальнего обзора местности и датчиков охранной сигнализации к единой локальной или к географической системе координат, позволяет в реальном времени произвести ориентирование видеокамеры и тепловизора дальнего обзора на место попытки несанкционированного проникновения нарушителя и своевременно его идентифицировать, что не имеет аналогов среди известных инженерных комплексов технического наблюдения за охраняемой территорией, а значит, соответствует критерию «изобретательский уровень».
На фиг.1 представлен рисунок, поясняющий взаимодействие отдельных систем заявляемого комплекса технического наблюдения. Комплекс включает: 1 - пульт оператора (он условно показан как мобильный пункт управления и связи), соединенный каналом связи 2 с системой видеонаблюдения 3, которая состоит из мачты 4 с поворотной платформой 5 с видеокамерой 6 и тепловизором 7; расположенную на охраняемой территории систему охранной сигнализации 8, состоящую из датчиков 9а, 9б, … 9n, соединенных между собой локальными каналам связями 10а, 10б, … 10n и каналом связи 11 с пультом оператора 1.
Заявляемый комплекс работает следующим образом. Для простоты понимания технической сути заявляемого технического решения поясним, что одновременно с установкой на местности датчиков 9а-9n осуществляется их привязка к системе координат. Более подробно об установке датчиков на местности и определении их координат при помощи мобильного изделия КОПР можно познакомиться на сайте производителя изделия (http://www.radiobarier.ru/). Вкратце это происходит следующим образом. При включении (сразу после установки) датчиков 9а-9n, их GPS координаты автоматически определяются изделием КОПР и по радиоканалу передаются на пульт оператора 1, где наносятся на электронную карту местности, которая представляет собой план местности в 2D или 3D формате, где индивидуальными заводскими номерами обозначены все установленные датчики. Аналогичная карта местности зашита в память системы координатного позиционирования поворотной платформы 5. Теперь рассмотрим непосредственно работу комплекса технического наблюдения за охраняемой территорией после срабатывания одного из датчиков 9а-9n. Сигнал тревоги от любого из датчиков 9а-9n по локальным каналам связями 10а-10n поступает на тот из датчиков 9 (на рисунке это датчик 9а), который находится в зоне приема канала связи 11 пульта оператора 1. Допустим, датчик 9n передает сигнал тревоги, который по каналам связи 10а-10n поступает на датчик 9a и через него на пульт оператора 1. Локальная система связи 10a-10n организована таким образом, что каждый из датчиков 9а-9n выступает ретранслятором сигнала, который он принял от ближайшего датчика (9в) и передает его другому ближайшему датчику (9а) в неизменном виде. Таким образом, сигнал тревоги, который передал датчик 9n, заложив в него свои GPS координаты, поступил на пульт оператора 1. Поскольку в памяти компьютера пульта оператора 1 содержится электронная карта местности с указанием GPS координат всех датчиков 9а-9n, а в памяти системы координатного позиционирования поворотной платформы 5 находится аналогичная электронная карта, то по переданным с пульта оператора 1 по каналу связи 2 координатам датчика 9п, передавшего тревожное сообщение, поворотная платформа 5 с видеокамерой 6 и тепловизором 7 автоматически наводится на указанную точку, поворачиваясь по азимуту и углу места. Видеокамера 6 и/или тепловизор 7 начинают автоматически передавать изображение и оператор может видеть на экране дисплея пульта оператора 1 картинку с места события и нарушителя, вызвавшего это срабатывание датчика 9n.
Рассмотрим работу комплекса в ручном режиме. В случае появления необходимости получения визуальной информации из определенного квадрата в зоне ответственности комплекса оператор может в ручном режиме ввести GPS координаты нужного места. Далее простые геометрические вычисления с использованием цифровой карты местности, выполненные специальным программным обеспечением в автоматическом режиме, позволяют вычислить азимут и угол места для поворотной платформы 5. Платформа разворачивается и наводит видеокамеру 6 и тепловизор 7 на указанную точку. Далее все, как в предыдущем примере.
При необходимости оператор может вручную осмотреть и ближайшие окрестности указанной точки, пользуясь при этом джойстиком пульта оператора 1 и трансфокатором видеокамеры 6 и тепловизора 7 (данные функции доступны оператору через программу удаленного доступа, установленную на компьютере пульта оператора 1).
Способ ввода GPS координат в комплекс может быть абсолютно любым. Координаты могут быть введены с клавиатуры руками, с сенсорного экрана монитора с картой, с цифрового носителя типа флэш карты или переданы по стандартным каналам связи типа Интернет и др. (полная аналогия с автомобильным GPS навигатором). Кроме того, координаты могут быть переданы и по специальным каналам связи типа «Радиобарьер», изделием типа КОПР.
В случае с изделием КОПР комплекс работает следующим образом. КОПР имеет встроенный GPS модуль для определения своей текущей координаты, которую он регулярно передает на пульт оператора 1. Тревожная группа, имеющая с собой КОПР, будет всегда находиться под наблюдением оператора, так как поворотное устройство 5 будет наводить видеокамеру 6 и тепловизор 7 синхронно с получаемыми координатами. Такое визуальное отслеживание оператором траектории движения группы существенно повысит ее эффективность и безопасность передвижения.
Таким образом, в комплексе реализована возможность автоматического наведения на любой участок местности без использования видимых на экране пульта оператора ориентиров.
Рассмотрим примеры работы комплекса по нарушителям разных типов.
На охраняемой территории в качестве датчиков могут использоваться пассивные инфракрасные сенсоры типа РС-ИК из охранных комплексов Радиобарьер (см. http://www.radiobarier.ru/). При включении этих датчиков GPS координаты каждого автоматически определяются изделием КОПР и по радиоканалу передаются на пульт оператора 1. Таким образом, все датчики отображаются на цифровой карте местности.
В случае появления «нарушителя» в зоне обнаружения (ЗО) датчика (датчик определяет его по изменению теплового излучения в ЗО) на пульт оператора 1 передается сигнал тревоги. Вместе с сигналом тревоги датчик передает на пульт свой индивидуальный номер и соответственно его координата становится известна на пульте оператора. Специальное программное обеспечение путем простых геометрических вычислений определяет азимут на точку расположения датчика и угол места. Поворотное устройство поворачивается по указанному азимуту и углу места. В поле зрения тепло/видео камер оказывается ЗО датчика, передавшего сигнал тревоги. Быстродействие комплекса достаточно для того, чтобы «нарушитель» не успел переместиться за пределы кадра. Если оператор увидел в кадре животное, то выезд тревожной группы на место события отменяется.
Радиосигнализаторы РС-У из охранного комплекса Радиобарьер способны обнаруживать низко летящие цели типа вертолета. При этом датчик самостоятельно может идентифицировать такого нарушителя и передать на пульт оператора сигнал тревоги с указанием типа нарушителя. Далее все происходит, как в первом примере, с той лишь разницей, что угол места поворотному устройству задается с превышением над поверхностью земли.
Для проверки работоспособности заявляемого комплекса был изготовлен опытный образец со следующими техническими характеристиками.
Тепловизионная камера:
- дальность обнаружения цели типа автомобиль - не менее 9660 м;
- дальность обнаружения цели типа человек - не менее 4365 м;
- спектральный диапазон 8-12 мкм;
- формат видеосигнала - PAL;
- диапазон рабочих температур - от минус 30 до плюс 50°C.
Телевизионная камера:
- дальность обнаружения цели типа автомобиль - не менее 25600 м;
- дальность обнаружения цели типа человек - не менее 12800 м;
- минимальная чувствительность в цветном режиме - 0,03 лк;
- минимальная чувствительность в черно-белом режиме - 0,004 лк;
- поле зрения по горизонтали - от 11,8 до 0,5°;
- формат видеосигнала - PAL;
- диапазон рабочих температур - от минус 30 до плюс 50°C.
Поворотная платформа:
- точность наведения оптических осей, не хуже 0,1°;
- диапазон углов поворота по азимуту - 360° (круговое вращение);
- диапазон углов поворота по углу места - 180° (+/-90);
- диапазон рабочих температур - от минус 30 до плюс 50°C;
- интерфейсы управления RS-485, -422, -232 (дополнительно IP Ethernet, радиомодем).
Цифровой видеорегистратор (устройство приема, обработки и архивирования видеоинформации):
- количество видеовходов/видеовыходов - 4/2;
- формат входных и выходных видеосигналов - PAL, 25 кадров/с;
- объем памяти для видеозаписи, не менее - 2 Тб, (HDD);
- максимальное разрешение записи - 720×576 точек;
- режим записи - постоянный (по тревоге от датчиков или по детектору движения или комбинированный);
- диапазон рабочих температур - от плюс 5 до плюс 35°C;
- дополнительные функции - порты USB и сетевой Ethernet, управление с помощью «мыши» или клавиатуры.
Пульт оператора:
- ноутбук с экраном 17 дюймов с установленным специальным программным обеспечением.
Функции программного обеспечения:
- управление поворотным устройством - ручное и автоматическое (по командам целеуказания от систем обнаружения и целеуказания) или пропорциональное управление скоростью поворота (в ручном режиме) или автоматическое сканирование местности по заданным предварительным установкам;
- управление тепловизионной камерой - режимы отображения ПОЗИТИВ /НЕГАТИВ, двух или четырех кратное цифровое увеличение, управление фокусировкой объектива;
- управление телевизионной камерой - включение/ выключение, управление фокусировкой и полем зрения (зумом) объектива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный комплекс видео-тепловизионного наблюдения | 2018 |
|
RU2671155C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОДНОРАНГОВОЙ ИНФОРМАЦИОННОЙ СЕТЬЮ | 2016 |
|
RU2636012C1 |
| Беспроводная самоорганизующаяся сетевая система мониторинга охраняемой территории | 2016 |
|
RU2620239C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2010 |
|
RU2427039C1 |
| Сетевая система видеонаблюдения с возможностью контроля поведенческих факторов и биометрических параметров объектов наблюдения | 2019 |
|
RU2731032C1 |
| Автоматизированный комплекс для охраны территорий объектов с робототехнической системой | 2020 |
|
RU2759345C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории | 2016 |
|
RU2629521C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
Изобретение относится к охранным системам с использованием систем видеонаблюдения и тепловизионной аппаратуры дальнего обзора, привязанных к электронной карте охраняемой местности. Технический результат заключается в повышении быстродействия и точности обнаружения. Заявленный комплекс включает пульт оператора, соединенный каналом связи с системой видеонаблюдения, установленной на поворотной платформе с видеокамерой и тепловизором. Поворотная платформа оснащена системой координатного позиционирования, которая привязана к локальной или к географической системе координат, а пульт оператора соединен каналами связи с датчиками охранной сигнализации, расположенными на охраняемой территории и имеющими индивидуальную привязку к той же локальной или к географической системе координат. 1 ил.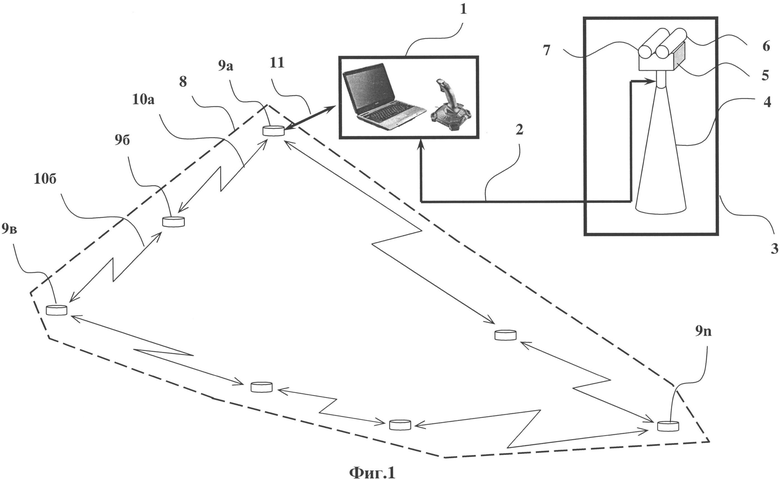
Комплекс технического наблюдения за охраняемой территорией, включающий пульт оператора, соединенный каналом связи с системой видеонаблюдения, которая состоит из мачты с поворотной платформой с видеокамерой и тепловизором, отличающийся тем, что поворотная платформа оснащена системой координатного позиционирования, которая привязана к локальной или к географической системе координат, а пульт оператора соединен каналами связи с датчиками охранной сигнализации, расположенными на охраняемой территории и имеющими индивидуальную привязку к той же локальной или к географической системе координат.
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| Устройство для выталкивания кип хлопка-волокна из пресс-камеры, гидравлических прессов | 1959 |
|
SU128753A1 |
| Активная искусственная кисть с автоматической и бесступенчатой фиксацией силового схвата | 1958 |
|
SU117687A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 6084510A1, 04.07.2000 | |||

