Изобретение относится к цифровым системам связи, в частности к локальным сетям передачи данных, и может быть использовано для тревожной сигнализации с использованием соединительных линий для предупреждения грабежей и краж, например, в отелях, гостиницах, офисах, многоквартирных домах и т.п., а также в госпиталях и больницах в палатах для тяжелобольных, в домах престарелых и т.п.
Известна система для контроля удаленных объектов [1].
Данная система содержит ряд вспомогательных (ведомых) контроллеров, каждый из которых контролирует как минимум одно устройство, например, датчик пожара, прерыватель закрытия окна, датчик температуры, сигнализатор и т.п. Эти контроллеры связаны с помощью двух линий связи с основным (ведущим) контроллером, который может запрашивать ведомые контроллеры для определения их состояния или состояния контроллируемых ими устройств, т.е. датчиков. В качестве линии связи используются витые пары.
Ведущий контроллер содержит ведущий процессор и память, которая позволяет производить запись и считывание. Процессор ведущего контроллера для каждого из ведомых контроллеров определяет в памяти аппаратный объект, т.е. совокупность обслуживаемых им устройств (датчиков). Для каждого аппаратного объекта ведущий процессор определяет как минимум один объект реагирования, например, дверь, окно, сейф и т.п. В случае нарушения связи как между ведущим и ведомым контроллерами, так и между ведомыми контроллерами и соответствующими им аппаратными объектами, система определяет место нарушения связи и класс сбоя для каждого аппаратного объекта, для чего ведущий процессор выделяет часть упомянутой памяти для каждого упомянутого объекта. Ведущий контроллер предопределяет также средства ответа для объектов реагирования, ответственные за сообщения об изменениях состояния устройств (датчиков) и объектов системных сбоев, которые сигнализируют об изменениях состояния системы, вырабатывая сигнал об этих изменениях.
Основным недостатком описанного аналога является недостаточная надежность системы при разрыве или закорачивании в удаленном от ведущего контроллера месте любой витой пары проводов, применяемой в системе для передачи информации от ведущего контроллера к ведомому контроллеру.
Сложность аппаратной реализации адаптеров сети ведомых контроллеров и адаптеров связи с контролируемыми устройствами (датчиками) при небольшом количестве таких датчиков также приводит к снижению надежности и в свою очередь к увеличению стоимости системы при большом количестве датчиков.
Отсутствие возможности фиксации срабатывания датчиков и других элементов в хронологическом порядке затрудняет восстановление действий обслуживающего персонала и работу системы на уровне датчиков при совершении несанкционированного доступа на контролируемый объект.
Ведущий контроллер, ведомые контроллеры, контролируемые ими устройства и линия связи - признаки аналога, совпадающие с существенными признаками заявляемого изобретения.
Причины, препятствующие получению требуемого технического результата в данном аналоге, обусловлены используемым методом передачи информации по каналу связи между ведущим и ведомыми контроллерами, который предполагает применение двух витых пар, используемой структурой ведомых контроллеров, предполагающей сложную аппаратную реализацию адаптеров, и отсутствием программного обеспечения, не позволяющим в хронологическом порядке фиксировать происходящие события в данной системе.
Известна также система наблюдения за локальными объектами, такими как дома [2] . В этой системе на каждом локальном объекте установлено локальное оборудование. Уникальные коды идентификации локальных объектов постоянно пересылаются между локальным оборудованием, расположенным на каждом из локальных объектов через канал связи путем сигнального процесса, который непрерывно повторяется. Любое локальное оборудование может начать этот процесс, так как генерирует внутренние сигналы для передачи своего собственного уникального кода и приема кодов от оборудования, расположенного на других локальных объектах. Оборудование на объектах начинает генерировать сигнал тревоги для определенного локального объекта, если для него не было получено правильного уникального кода. При возникновении опасной ситуации передаваемый уникальный сигнал модифицируется. Все оборудование на локальных объектах имеет один и тот же статус и может работать независимо от других объектов.
Каждое локальное оборудование снабжено индикаторным устройством, имеющим средства индикации для визуальной и/или звуковой индикации состояния других наблюдаемых объектов в остальных местах наблюдения, детектором сигнала тревоги, соединенным с индикаторным устройством, для генерации сигнала тревоги в случае обнаружения ненормальных условий (движения, возникновения дыма, огня, соответствующего события), переключателем для включения/отключения функций наблюдения детектора сигнала и источником питания, снабжающим энергией локальное оборудование.
Каждое индикаторное устройство содержит генератор точной частоты для управления работой индикаторного устройства, передатчик для передачи уникального для каждого объекта сигнала, приемник, принимающий уникальные сигналы, соответствующие остальным объектам, схему, управляемую приемником, на которую он воздействует в том случае, когда нужный уникальный сигнал, присущий каждому объекту, не получен, и средство для инициирования передачи уникального сигнала объекта, управляемого сигналом тревоги в том случае, когда активизируется заданному устройству функция наблюдения.
Признаки описанного аналога, совпадающие с существенными признаками заявляемого изобретения, следующие - ведомые контроллеры, средства индикации и линия связи.
Недостатками данной системы являются недостаточная гибкость системы в части невозможности адаптирования локального оборудования для наблюдения за объектами с большим количеством помещений, такими как отель, гостиница и т. п., недостаточная надежность, так как при отказе приемо-передатчика на закорачивание вся система перестает функционировать, и отсутствие фиксирования возникновения опасных ситуаций, что снижает контроль работы данной системы обслуживающим персоналом.
Причины, препятствующие получению требуемого технического результата в данном аналоге, обусловлены выполнением локального оборудования по жесткой логике, не позволяющей добавить новые узлы (например, гальваническую развязку и фиксирующее оборудование) без качественного изменения имеющейся структуры.
Наиболее близкой по техническому решению к предлагаемой является система последовательного и произвольного опроса с практически мгновенным временем ответа [3], в которой контроллер опрашивает адресуемые ответчики в последовательном или произвольном порядке, разрешая им отвечать только в установленные для них периоды времени. Определенные ответчики имеют возможность отвечать в течение специального, заранее определенного интервала времени, в том случае, если во-первых, ответчик запрограммирован на ответ в течение специального интервала времени, и, во-вторых, этот интервал времени наступил. Путем помещения этих интервалов в одной и той же позиции в установленном для каждого ответчика времени ответа обеспечивается общее время (publik time), позволяющее практически мгновенную идентификацию и верификацию в случае возникновения ситуации тревоги, обеспечивая таким образом высокоприоритетное прерывание. Ответчики, запрограммированные на возможность ответа в течение общего времени, могут быть разделены на отдельные группы, которые могут быть распознаны контроллером.
Ответчики подсоединены к контроллеру посредством каналов связи, в качестве которых можно использовать кабель (оптический, коаксиальный или обычный), передачу радиоволнами соответствующими приемниками и источниками и т. п. По крайней мере один ответчик (или группа ответчиков) может быть подсоединен к сенсору, который также может быть любого типа: температурным, движения, воды, инфрасенсором и т.д. По крайней мере один ответчик (или группа ответчиков) включает в себя специально спроектированную схему для вырабатывания высокоприоритетного прерывания, а также выключатель толкающего типа, соединенный с упомянутой схемой. Ответчик может быть выполнен таким образом, чтобы рядом с ним можно было расположить магнит. Кроме того, схемы ответчиков могут быть выполнены каким-либо другим способом.
Система может также включать в себя устройства для приема сигналов от ответчиков других групп.
Система обладает всеми преимуществами адресабельной системы опроса, особенно при наличии внештатной ситуации, связанной с отсутствием ответа от адресуемого ответчика. Кроме того, система обеспечивает немедленный отклик на попытку ограбления, что обеспечивается введением public time для отклика от какого либо ответчика, находящегося внутри временного сегмента адреса данного ответчика или между смежными адресами.
Другим важным преимуществом этой системы является то, что группированием сигналов тревоги (ограбления) можно создавать "зоны ограбления" внутри более широкой зоны. Более того, можно создавать много зон такого рода. В этом случае сигналы будут поступать на контроллер от таких зон, и контроллер будет идентифицировать выбор группы A, группы B и т.п. Тесты показывают, что период времени отклика public time, времени подтверждения отклика и принятия необходимых действий (например, переключение реле) составляет 1,5 с.
Недостатками системы являются недостаточная гибкость системы в части невозможности адаптирования ответчиков для наблюдения за объектами с большим количеством сенсоров и отсутствие фиксирующего устройства опасных ситуаций.
Причины, препятствующие достижению требуемого технического результата, заключаются в том, что протокол выдачи ответов ответчиками реализован на жесткой логике, не позволяющей добавлять и видоизменять диаграмму ответов, без качественного изменения структуры контроллера и ответчиков.
Задача, на решение которой направлено предлагаемое изобретение, заключается в:
а) повышении скорости реагирования на несанкционированное проникновение в охраняемую зону;
б) повышении надежности системы за счет:
распределенного съема и обработки информации, что при отказе локального узла не приводит к отказу всей системы;
упрощения схемотехники посредством применения специального программного обеспечения;
в) расширения функциональных возможностей по уровню предлагаемого перечня услуг по предотвращению несанкционированного доступа в объектах с большим количеством помещений, например, номерного фонда гостиничных комплексов, повышения эффективности работы группы захвата за счет фиксации в компьютере всей информации, представления всей оперативной и документальной информации, необходимой для ведения следствия криминальными органами;
г) устранения неполадок и отказов в минимально возможное время.
Технический результат, достигаемый при осуществлении изобретения, следующий:
скорость реагирования на несанкционированное проникновение в охраняемую зону (например, номер гостиницы) находится в интервале от 0,001 до 0,7 с и зависит от используемой элементной базы и количества обслуживаемых одним ведомым контроллером групп датчиков;
надежность системы обеспечена распределенным съемом и обработкой информации и упрощенной схемотехникой за счет переноса реализации большинства функций на программный уровень и применения специального программного обеспечения, использующего дублирующие посылки команд при сбоях в системе;
система позволяет осуществлять охрану объектов с большим количеством помещений, таких как гостиница, отель и т.п., полностью контролировать состояние охраняемых помещений, способствовать эффективной работе группы захвата по предотвращению несанкционированного доступа и по раскрытию совершенной кражи, а именно:
а) осуществлять визуальный контроль на экране монитора за нахождением ключей по номерам в различное время (во время уборки номеров, нахождения или отсутствия клиентов и т.д.), состоянием ночной охраны (охраны номера, когда в нем находится клиент), состоянием дверей (открыто/закрыто) и т.п.;
б) выполнять групповые операции одновременно над множеством датчиков номеров;
в) корректировать состояние любого бита (флага) информации по каждому номеру (ключ сдан/выдан, номер свободен/занят);
г) оперативно менять режимы работы и конфигурацию системы;
д) тестировать каждый контроллер и его части и т.д.;
е) наблюдать за всеми флагами по восьми номерам одновременно;
ж) использовать механизм повторных запросов для предотвращения ложных сбоев и ошибок и тревог;
з) фиксировать на диске компьютера и выводить на принтер все изменения битовых флагов, участвующих в вычислении сигнала тревоги как по одному помещению, группе помещений и/или по всему объекту по одному и/или нескольким событиям одновременно;
нахождение и устранение неисправностей в течение 10-15 мин за счет индикации адресов сбойнувших или вышедших из строя контроллеров и/или их узлов.
Для достижения технического результата в систему тревожной сигнализации, содержащую ведущий контроллер, линию связи и соединенные между собой n групп датчиков по B/n/ датчиков в каждой, каждая из которых через одноименный блок сопряжения подключены к одноименному ведомому контроллеру датчиков, каждый из которых и ведущий контроллер подключены к линии связи, в нее введены устройство управления, предназначенное для перевода системы из одного режима в другой, главный ведомый контролллер, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров, и вспомогательные ведомые контроллеры, причем устройство управления, предназначенное для перевода системы из одного режима в другой, соединено с ведущим контроллером, главный ведомый контроллер, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров, соединен с ведомыми контроллерами датчиков, вспомогательными ведомыми контроллерами и ведущим контроллером посредством линии связи, ведущий контроллер содержит генераторы импульсов, микропроцессор, блок сброса, регистр, запоминающие устройства, дешифратор, таймеры, адаптеры, усилитель, формирователь, выключатель, светодиодный индикатор, блок индикации, преобразователь, причем первый и второй выходы первого генератора импульсов соединены с первым и вторым входами микропроцессора, третий вход микропроцессора соединен с выходом блока сброса и вторым входом второго таймера, четвертый вход микропроцессора соединен с первым выходом первого таймера, пятый вход микропроцессора соединен с выходом последовательного адаптера, шестой вход микропроцессора соединен с выходом преобразователя, группа двунаправленных входов-выходов микропроцессора соединена с группой входов регистра, группой двунаправленных входов-выходов оперативного запоминающего устройства, группой выходов постоянного запоминающего устройства, группой двунаправленных входов-выходов первого таймера, группой двунаправленных входов-выходов последовательного адаптера, группой двунаправленных входов-выходов второго таймера и группой двунаправленных входов-выходов параллельного адаптера, первая группа выходов микропроцессора (старшие адресные 8 линий) соединена с первой группой входов дешифратора, первой группой входов оперативного запоминающего устройства и первой группой входов постоянного запоминающего устройства, вторая группа выходов микропроцессора соединена с второй группой входов дешифратора, второй группой входов оперативного запоминающего устройства, второй группой входов постоянного запоминающего устройства, группой входов второго таймера, первой группой входов последовательного адаптера, первой группой входов первого таймера и первой группой входов параллельного адаптера, линии третьей группы выходов микропроцессора соединены с входом регистра, с первым входом второго таймера, вторым входом первого таймера, второй группой входов последовательного адаптера и первым входом параллельного адаптера, линии группы выходов регистра соединены с третьей группой входов оперативного запоминающего устройства, третьей группой входов постоянного запоминающего устройства, второй группой входов первого таймера, первым входом последовательного адаптера и второй группой входов параллельного адаптера, вход оперативного запоминающего устройства соединен с первым выходом дешифратора, второй выход дешифратора соединен с вторым входом параллельного адаптера, третий выход дешифратора соединен с входом постоянного запоминающего устройства, четвертый выход дешифратора соединен с третьим входом второго таймера, пятый выход дешифратора соединен с первым входом первого таймера и шестой выход дешифратора соединен с вторым входом последовательного адаптера, линии группы выходов усилителя соединены с третьей группой входов последовательного адаптера и четвертым входом второго таймера, пятый и шестой входы второго таймера соединены с первым и вторым выходами второго генератора импульсов, второй выход первого таймера соединен с третьим входом последовательного адаптера, группа выходов которого соединена с группой входов формирователя, первый, второй и третий выходы параллельного адаптера соединены с первым, вторым и третьим входами преобразователя, первый и второй двунаправленные входы-выходы которого подсоединены к линии связи, третий вход параллельного адаптера соединен с выходом выключателя, первая группа выходов параллельного адаптера соединена с группой входов светодиодного индикатора, вторая группа выходов параллельного адаптера соединена с группой входов первого адаптера, группа выходов которого соединена с первой группой входов блока индикации, вторая группа входов которого соединена с группой выходов второго адаптера, группа входов которого соединена с третьей группой выходов параллельного адаптера, группа входов усилителя является входом ведущего контроллера, группа выходов формирователя является выходом ведущего контроллера; главный ведомый контроллер, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров, содержит генератор импульсов, микроЭВМ, блок сброса, регистр, преобразователь, постоянное запоминающее устройство (ПЗУ), светодиодный индикатор, адаптеры, клавиатуру и блок индикации, причем блок сброса первым, вторым и третьим выходами соединен с третьим, четвертым и пятым входами микроЭВМ, генератор импульсов первым и вторым выходами соединен с первым и вторым входами микроЭВМ, шестой и седьмой входы микроЭВМ соединены с вторым и первым выходами преобразователя, первый, второй и третий выходы микроЭВМ соединены с первым, вторым и третьим входами преобразователя, четвертый выход микроЭВМ соединен с входом регистра, пятый выход микроЭВМ соединен с входом ПЗУ, шестой и седьмой выходы микроЭВМ соединены с первым и вторым входами светодиодного индикатора, первая группа выходов микроЭВМ соединена с первой группой входов ПЗУ, вторая группа выходов микроЭВМ соединена с первой группой входов параллельного адаптера, группа двунаправленных входов-выходов микроЭВМ соединена с группой входов регистра, группой выходов ПЗУ и группой двунаправленных входов-выходов параллельного адаптера, вторая группа входов ПЗУ соединена с второй группой входов параллельного адаптера и группой выходов регистра, первый и второй двунаправленные вход-выход преобразователя соединены с линией связи, первая группа выходов параллельного адаптера соединена с группой входов первого адаптера, вторая группа выходов параллельного адаптера соединена с группой входов второго адаптера, третья группа входов параллельного адаптера соединена с группой выходов клавиатуры, группа выходов первого адаптера соединена с первой группой входов блока индикации, группа выходов второго адаптера соединена с второй группой входов блока индикации и группой входов клавиатуры;
ведомый контроллер датчиков состоит из генератора импульсов, микроЭВМ, блока сброса, преобразователя, регистра, запоминающих устройств, адаптеров, блока индикации и клавиатуры, причем первый и второй выходы генератора импульсов соединены с первым и вторым входами микроЭВМ, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса соответственно, и шестой и седьмой входы соединены с первым и вторым выходами преобразователя, группа двунаправленных входов-выходов микроЭВМ соединена с группой входов регистра, группой двунаправленных входов-выходов оперативного запоминающего устройства, параллельного адаптера и группой выходов постоянного запоминающего устройства, первый, второй и третий выходы микроЭВМ соединены с первым, вторым и третьим входами преобразователя соответственно, четвертый выход микроЭВМ соединен с входом регистра, группа выходов которого соединена с первой группой входов оперативного запоминающего устройства, второй группой входов постоянного запоминающего устройства и первой группой входов параллельного адаптера, пятый выход микроЭВМ соединен с входом параллельного адаптера, первая группа выходов микроЭВМ соединена с второй группой входов оперативного запоминающего устройства, вторая группа выходов микроЭВМ соединена с третьей группой входов оперативного запоминающего устройства и второй группой входов параллельного адаптера, третья группа выходов микроЭВМ соединена с первой группой входов постоянного запоминающего устройства, шестой выход микроЭВМ соединен с входом постоянного запоминающего устройства, первый и второй двунаправленные входы-выходы преобразователя соединены с линией связи, третья группа входов параллельного адаптера соединена с группой выходов клавиатуры, первая группа выходов параллельного адаптера соединена с группой входов первого адаптера, группа выходов которого соединена с первой группой входов блока индикации, вторая группа выходов параллельного адаптера соединена с группой входов второго адаптера, группа выходов которого соединена с группой входов клавиатуры и второй группой входов блока индикации, четвертая группа выходов микроЭВМ является выходом ведомого контроллера датчиков, четвертая группа входов параллельного адаптера является входом ведомого контроллера датчиков;
блок сопряжения содержит дешифратор, элементы И-НЕ, фильтры, причем группы выходов элементов И-НЕ объединены и являются группой выходов блока сопряжения, первой группой входов которого является группа входов дешифратора, выходы которого соединены с первыми входами элементов И-НЕ, другие входы которых соединены с выходами фильтров, входы которых являются второй группой входов блока сопряжения;
вспомогательный ведомый контроллер содержит генератор импульсов, микроЭВМ, блок сброса, регистр, преобразователь, постоянное запоминающее устройство, адаптеры, блок индикации и клавиатуру, причем первый и второй выходы генератора импульсов соединены с первым и вторым входами микроЭВМ, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса соответственно, шестой и седьмой входы микроЭВМ соединены с первым и вторым выходами преобразователя, первый, второй и третий входы которого соединены с первым, вторым и третьим выходами микроЭВМ, группа двунаправленных входов-выходов которой соединена с группой входов регистра, группой выходов постоянного запоминающего устройства и группой двунаправленных входов-выходов параллельного адаптера, четвертый выход микроЭВМ соединен с входом регистра, группа выходов которого соединена с первой группой входов постоянного запоминающего устройства и первой группой входов параллельного адаптера, пятый выход микроЭВМ соединен с входом постоянного запоминающего устройства, вторая группа входов которого соединена с первой группой выходов микроЭВМ, вторая группа выходов которой соединена с второй группой входов параллельного адаптера, третья группа входов которого соединена с группой выходов клавиатуры, группа входов которой соединена с второй группой входов блока индикации и группой выходов второго адаптера, группа входов которого соединена с первой группой выходов параллельного адаптера, вторая группа выходов которого соединена с группой входов первого адаптера, группа выходов которого соединена с первой группой входов блока индикации, первый и второй двунаправленные входы-выходы преобразователя соединены с линией связи;
ведомый контроллер датчиков содержит генератор импульсов, микроЭВМ, блок сброса, регистры, преобразователь, запоминающие устройства, причем первый и второй выходы генератора импульсов соединены с первым и вторым входами микроЭВМ, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса соответственно, шестой и седьмой входы микроЭВМ соединены с первым и вторым выходами преобразователя, первый, второй и третий входы которого соединены с первым, вторым и третьим выходами микроЭВМ, четвертый выход которой соединен с входом первого регистра, группа выходов которого соединена с первой группой входов оперативного запоминающего устройства и первой группой входов постоянного запоминающего устройства, вход которого соединен с пятым выходом микроЭВМ, шестой выход которой соединен с входом второго регистра, группа входов которого является группой входов ведомого контроллера датчиков, группа выходов второго регистра соединена с группой выходов постоянного запоминающего устройства, с группой двунаправленных входов-выходов оперативного запоминающего устройства, группой входов первого регистра и группой двунаправленных входов-выходов микроЭВМ, третья группа выходов которой соединена с второй группой входов постоянного запоминающего устройства, а четвертая группа выходов микроЭВМ является группой выходов ведомого контроллера датчиков, первая и вторая группы выходов микроЭВМ соединены с второй и третьей группами входов оперативного запоминающего устройства, соответственно, первый и второй двунаправленные входы-выходы преобразователя соединены с линией связи.
На фиг. 1 изображена схема системы тревожной сигнализации; на фиг.2 - схема ведущего контроллера системы; на фиг.3 - схема ведомого контроллера датчиков системы (для случая P=0); на фиг.4 - схема блока сопряжения системы; на фиг. 5 - схема главного ведомого контроллера системы; на фиг.6 - схема вспомогательного ведомого контроллера системы; на фиг.7 - схема ведомого контроллера датчиков (для случая P > 0); на фиг.8 - форматы пакетов Запрос и Ответ; на фиг.9 - фрагмент списка команд, поступающих от устройства управления 1 к ведущему контроллеру 2.
На фиг.1 изображена схема системы тревожной сигнализации, содержащая устройство 1 управления, предназначенное для перевода системы из одного режима в другой, ведущий контроллер 2, главный ведомый контроллер 3, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров.
К линии связи 4 подсоединен ведомый контроллер датчиков 5.n.Z(n) n-ой группы, к которому подсоединен блок сопряжения 6.n.Z(n) n-ой группы, к которому подсоединены датчики 7.п.Z(n).1,...,7.n.Z(n).X(n.Z(n)) n-ой группы, где n= 1,2, . ..,N, т.е. натуральный ряд. Если принять, что Z(n) -количество как ведомых контроллеров датчиков 5.n.Z(n), так и блоков сопряжения 6.n.Z(n) в n-ой группе, то тогда множество датчиков в n-ой группе можно определить как B(n)=X(n,1)+X(n,2)+...+X(n,Z(n)), где
X(n,1) - множество датчиков, обслуживаемых первым блоком сопряжения 6.n. 1 n-ой группы;
X(n,2) - множество датчиков, обслуживаемых вторым блоком сопряжения 6.n. 2 n-ой группы;
X(n, Z(n)) - множество датчиков, обслуживаемых Z(n)-ым блоком сопряжения 6.n.Z(n) n-ой группы;
Z(n)=1,2,... - множество ведомых контроллеров датчиков 5 n-ой группы.
К линии связи 4 подсоединен вспомогательный ведомый контроллер 5.N+1.1 (N+1)-ой группы, а также вспомогательные ведомые контроллеры 5.N+1.2,...,5. N+1. Z(N+1) (N+1)-ой группы, 5.N+2.1, 5.N+2.2,..., 5.N+2.Z(N+2) вспомогательные ведомые контроллеры (N+2)-ой группы и т.д., 5.N+P.1, 5.N+P.2,...,5. N+P.Z(N+P) вспомогательные ведомые контроллеры (N+P)-ой группы.
Количественные характеристики групп ведомых контроллеров датчиков, блоков сопряжения, датчиков, вспомогательных ведомых контроллеров, ровно как и соотношение их между собой, могут быть обусловлены целым рядом различных факторов, среди которых наиболее часто встречаются следующие:
архитектура объекта охраны, например, количество этажей, длина этажа (количество комнат на этаже), количество коммуникационных шахт и т.д. и т.п. ;
участие персонала в работе системы, например, контроль за продвижением ключей в службе портье или на этажах;
наличие специализированных объектов, например складов, баров, ресторанов и т.п.
Ведущий контроллер 2 содержит первый генератор импульсов 8 (фиг.2), первым выходом соединенный с первым входом микропроцессора 9, второй вход которого соединен с вторым выходом первого генератора импульсов 8. Третий вход микропроцессора 9 соединен с выходом блока сброса 10. Регистр 11 соединен группой входов с группой двунаправленных входов-выходов микропроцессора 9 и группой двунаправленных входов-выходов оперативного запоминающего устройства (ОЗУ) 12. Первая группа выходов микропроцессора 9 соединена с первой группой входов ОЗУ 12, первой группой входов дешифратора 13 и первой группой входов постоянного запоминающего устройства (ПЗУ) 14, вход которого соединен с третьим выходом дешифратора 13, первый выход которого соединен с входом ОЗУ 12, группа двунаправленных входов-выходов которого соединена с группой выходов ПЗУ 14 и группой двунаправленных входов-выходов второго таймера 15, второй вход которого соединен с выходом блока сброса 10. Третий вход второго таймера 15 соединен с четвертым выходом дешифратора 13. Пятый и шестой входы второго таймера 15 соединены с первым и вторым выходами второго генератора импульсов 16 соответственно. Первый вход первого таймера 17 соединен с пятым выходом дешифратора 13, шестой выход которого соединен с вторым входом последовательного адаптера 18, третья группа входов которого соединена с группой выходов усилителя 19 и четвертым входом второго таймера 15. Группа входов усилителя 19 соединена с входом 20 ведущего контроллера 2. Выход 21 ведущего контроллера 2 соединен с группой выходов формирователя 22, группа входов которого соединена с группой выходов последовательного адаптера 18, выход которого соединен с пятым входом микропроцессора 9, четвертый вход которого соединен с первым выходом первого таймера 17, первая группа входов которого соединена с первой группой входов последовательного адаптера 18 и первой группой входов параллельного адаптера 23, первый вход которого соединен с второй группой входов последовательного адаптера 18, вторым входом первого таймера 17, первым входом второго таймера 15, третьей группой выходов микропроцессора 9 и входом регистра 11, группа выходов которого соединена с третьей группой входов ОЗУ 12, третьей группой входов ПЗУ 14, второй группой входов первого таймера 17, первым входом последовательного адаптера 18 и второй группой входов параллельного адаптера 23. Вторая группа выходов микропроцессора 9 соединена с второй группой входов дешифратора 13, второй группой входов ОЗУ 12, второй группой входов ПЗУ 14, группой входов второго таймера 15, первой группой входов первого таймера 17 и первыми группами входов последовательного 18 и параллельного 23 адаптеров. Второй выход дешифратора 13 соединен с вторым входом параллельного адаптера 23. Второй выход первого таймера 17 соединен с третьим входом последовательного адаптера 18. Третий вход параллельного адаптера 23 соединен с выходом выключателя 24. Группа входов светодиодного индикатора 25 соединена с первой группой выходов параллельного адаптера 23, вторая группа выходов которого соединена с группой входов первого адаптера 26, группа выходов которого соединена с первой группой входов блока индикации 27, вторая группа входов которого соединена с группой выходов второго адаптера 28. Первый, второй и третий выходы параллельного адаптера 23 соединены с первым, вторым и третьим входами преобразователя 29, выход которого соединен с шестым входом микропроцессора 9. Первый и второй двунаправленные входы-выходы преобразователя 29 соединены с линией связи 4. Третья группа выходов параллельного адаптера 23 соединена с группой входов второго адаптера 28. Группа двунаправленных входов-выходов первого таймера 17 соединена с группой двунаправленных входов-выходов последовательного адаптера 18, группой двунаправленных входов-выходов параллельного адаптера 23 и группой двунаправленных входов-выходов микропроцессора 9.
Ведомые контроллеры датчиков 5 для случая, когда P=0, изображены на фиг. 3. Генератор импульсов 30 первым и вторым выходами соединен с первым и вторым входами микроЭВМ 31, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса 32. Первый, второй и третий выходы микроЭВМ 31 соединены с первым, вторым и третьим входами преобразователя 33, первый и второй выходы которого соединены с шестым и седьмым входами микроЭВМ 31, четвертый выход которой соединен с входом регистра 34. Группа выходов 35 ведомого контроллера датчиков 5 соединена с четвертой группой выходов микроЭВМ 31. Группа выходов регистра 34 соединена с первой группой входов оперативного запоминающего устройства (ОЗУ) 36, с второй группой входов постоянного запоминающего устройства (ПЗУ) 37 и первой группой входов параллельного адаптера 38. Группа двунаправленных входов-выходов микроЭВМ 31 соединена с группой входов регистра 34, с группой двунаправленных входов-выходов ОЗУ 36, группой выходов ПЗУ 37 и группой двунаправленных входов-выходов параллельного адаптера 38. Первая и вторая группы выходов микроЭВМ 31 соединены с второй и третьей группами входов ОЗУ 36. Третья группа выходов микроЭВМ 31 соединена с первой группой входов ПЗУ 37, вход которого соединен с шестым выходом микроЭВМ 31, пятый выход которой соединен с входом параллельного адаптера 38. Первые и вторые двунаправленные входы-выходы преобразователя 33 соединены с линией связи 4. Вход 39 ведомого контроллера датчиков 5 соединен с четвертой группой входов параллельного адаптера 38. Первая группа выходов параллельного адаптера 38 соединена с группой входов первого адаптера 40, а вторая группа выходов - с группой входов второго адаптера 41 и третья группа входов - с группой выходов клавиатуры 42. Группа выходов первого адаптера 40 соединена с первой группой входов блока индикации 43, вторая группа входов которого соединена с группой входов клавиатуры 42 и группой выходов второго адаптера 41. Вторая группа выходов микроЭВМ 31 соединена с второй группой входов параллельного адаптера 38.
На фиг. 4 изображена схема реализации блока сопряжения 6.1.1 первой группы, в которой используется схема И-НЕ с шестью информационными входами, шестью трехстабильными выходами и одним управляющим входом. В этом случае каждый блок сопряжения 6.1.1,...,6.N.Z(N) содержит дешифратор 44 (фиг.4), первый выход которого соединен с первым входом элемента И-НЕ 45.1.1.1,..., L-й выход соединен с первым входом элемента И-НЕ 45.1.1.L. Второй вход элемента И-НЕ 45.1.1.1 соединен с выходом фильтра 46.1.1.1, вход которого соединен с выходом датчика 7.1.1.1,..., седьмой вход элемента И-НЕ 45.1.1.1 соединен с выходом фильтра 46.1.1.6, вход которого соединен с выходом датчика 7.1.1.6. Второй вход элемента И-НЕ 45.1.1.L соединен с выходом фильтра 46.1.1. X(1,1)-5, вход которого соединен с выходом датчика 7.1.1.X(1,1)-5, и т.д., седьмой вход элемента И-НЕ 45.1.1.L соединен с выходом фильтра 46.1.1. X(1,1), вход которого соединен с выходом датчика 7.1.1.X(1,1), где L - натуральный ряд. Группа входов дешифратора 44 является группой входов 35 блока сопряжения 6.1.1. Группы выходов элементов И-НЕ 45.1.1.1,..., 45.1.1.L объединены и являются группой выходов 39 блока сопряжения 6.1.1.
Главный ведомый контроллер 3 содержит генератор импульсов 47 (фиг.5), первый и второй выходы которого соединены с первым и вторым входами микроЭВМ 48, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса 49. Четвертый выход микроЭВМ 48 соединен с входом регистра 50. Шестой и седьмой выходы микроЭВМ 48 соединены с первым и вторым входами светодиодного индикатора 51. Первый, второй и третий выходы микроЭВМ 48 соединены с первым, вторым и третьим входами преобразователя 52, первый и второй выходы которого соединены с седьмым и шестым входами микроЭВМ 48. Группа выходов регистра 50 соединена с второй группой входов постоянного запоминающего устройства (ПЗУ) 53 и второй группой входов параллельного адаптера 54, первая группа входов которого соединена с второй группой выходов микроЭВМ 48, пятый выход которой соединен с входом ПЗУ 53, первая группа входов которого соединена с первой группой выходов микроЭВМ 48, группа двунаправленных входов-выходов которой соединена с группой входов регистра 50, группой выходов ПЗУ 53 и группой двунаправленных входов-выходов параллельного адаптера 54. Первые и вторые двунаправленные входы-выходы преобразователя 52 соединены с линией связи 4. Первая группа выходов параллельного адаптера 54 соединена с группой входов первого адаптера 55, а вторая группа выходов - с группой входов второго адаптера 56, группа выходов которого соединена с группой входов клавиатуры 57 и второй группой входов блока индикации 58, первая группа входов которого соединена с группой выходов первого адаптера 55. Группа выходов клавиатуры 57 соединена с третьей группой входов параллельного адаптера 54.
Вспомогательный ведомый контроллер 5 содержит (фиг.6) генератор импульсов 59, первый и второй выходы которого соединены с первым и вторым входами микроЭВМ 60, третий, четвертый и пятый входы которой соединены с первым, вторым и третьим выходами блока сброса 61. Четвертый выход микроЭВМ 60 соединен с входом регистра 62. Первый, второй и третий выходы микроЭВМ 60 соединены с первым, вторым и третьим входами преобразователя 63, первый и второй выходы которого соединены с шестым и седьмым входами микроЭВМ 60, первая группа выходов которой соединена с второй группой входов ПЗУ 64, вход которого соединен с пятым выходом микроЭВМ 60, вторая группа выходов которой соединена с второй группой входов параллельного адаптера 65, первая группа входов которого соединена с первой группой входов ПЗУ 64 и группой выходов регистра 62, группа входов которого соединена с группой двунаправленных входов-выходов микроЭВМ 60, группой выходов ПЗУ 64 и группой двунаправленных входов-выходов параллельного адаптера 65. Двунаправленные входы-выходы преобразователя 63 соединены с линией связи 4. Вторая группа выходов параллельного адаптера 65 соединена с группой входов первого адаптера 66, а первая группа выходов - с группой входов второго адаптера 67, группа выходов которого соединена с группой входов клавиатуры 68 и с второй группой входов блока индикации 69, первая группа входов которого соединена с группой выходов первого адаптера 66. Группа выходов клавиатуры 68 соединена с третьей группой входов параллельного адаптера 65.
Ведомые контроллеры датчиков 5 при P > 0 содержат (фиг.7 ) генератор импульсов 70, первый и второй выходы которого соединены с первым и вторым входами микроЭВМ 71, третий, четвертый и пятый входы которого соединены с первым, вторым третьим выходами блока сброса 72. Первый, второй и третий выходы микроЭВМ 71 соединены с первым, вторым и третьим входами преобразователя 73, первый и второй выходы которого соединены с шестым и седьмым входами микроЭВМ 71, четвертый выход которой соединен с входом первого регистра 74. Четвертая группа выходов микроЭВМ 71 является группой выходов 75 ведомого контроллера датчиков. Двунаправленные входы-выходы преобразователя 73 соединены с линией связи 4. Группа выходов регистра 74 соединена с первыми группами входов ОЗУ 76 и ПЗУ 77, вторая группа входов которого соединена с третьей группой выходов микроЭВМ 71, пятый выход которой соединен с входом ПЗУ 77, группа выходов которого соединена с группой выходов второго регистра 78, группой двунаправленных входов-выходов ОЗУ 76, группой входов первого регистра 74 и группой двунаправленных входов-выходов микроЭВМ 71. Группа входов второго регистра 78 является группой входов 79 ведомого контроллера датчиков. Первая и вторая группы выходов микроЭВМ 71 соединены с второй и третьей группами входов ОЗУ 76. Шестой выход микроЭВМ 71 соединен с входом второго регистра 78.
Рассмотрим работу системы, например, в гостинице для охраны номеров и других помещений гостиницы для случая, когда P = 0.
В качестве устройства управления (фиг.1) может быть использована любая ПЭВМ, совместимая с компьютером типа IBM PC XT/AT, минимальная емкость винчестера -не менее 20 Мбайт, экран монитора - EGA или VGA. Желательно наличие принтера.
Для связи всех компонентов системы в единую локальную сеть типа моноканал используются два интерфейса. Связь между устройством управления 1 и ведущим контроллером 2 осуществляется через последовательный канал RS-232 C (стык C 2). Связь между ведущим контроллером 2 и ведомыми контроллерами 3 и 5 осуществляется по двухпроводной линии, выполненной в виде витой пары (контроллеры также объединены парой питания). На концах этой витой пары установлены резисторы по 150 Ом для погашения отраженной волны сигнала. Все узлы и блоки системы гальванически развязаны между собой при помощи импульсных трансформаторов. При передаче информации между компонентами системы используется специальный код HP-IL (Hewlett-Packard Interface Loop), используемый при передачи сигналов по двухпроводным линиям связи (C.J. Lansness, The Electronics Interface for the Hewlett-Packard Interface Loop, Hewlett-Packard Journal, January 1983, pp. 11-17, а также D. Del Corso, H. Kirrmann, J. D. Nicond, Microcomputer Buses and Links, Academic Press, 1986, p. 314-316).
При таких условиях количество подключаемых ведомых контроллеров 5 может быть 32 и более, количество комнат, охраняемых одним ведомым контроллером, 5-88 и более, скорость обмена информацией по локальной сети - от 10 до 100 Кбит/с.
Каждому ведущему 2 и ведомому контроллеру 3 или 5 присвоен свой индивидуальный номер - адрес, который записан в постоянной памяти программы этого контроллера.
После включения питания система охранной сигнализации может работать в одном из трех режимов: Ведомый, Ведущий без фиксации и Ведущий с фиксацией. Рассмотрим работу системы в каждом режиме.
Режим Ведомый. В этом режиме система не выполняет функций охранной сигнализации. Как ведущий контроллер 2, так и ведомые контроллеры 3 и 5, находятся в состоянии ожидания поступления команды от устройства управления 1.
Если команда, выдаваемая устройством управления 1, предназначена для ведущего контроллера 2, последний исполняет ее и выдает ответ устройству управления 1.
Если команда предназначена для ведомых контроллеров 5 или главного ведомого контроллера 3, то после того, как ведущий контроллер 2 принимает ее от устройства управления 1, он ретранслирует ее в линию связи 4. Все ведомые контроллеры 5 и главный ведомый контроллер 3 принимают команду из линии связи 4. Исполняет же ее только тот контроллер, адрес которого совпадет с содержимым поля адреса принятой команды. После исполнения команды этот ведомый контроллер 3 или 5 выдает ответ, который через линию связи 4 и ведущий контроллер 2 ретранслируется в устройство управления 1.
Данный режим возможен только при включенном устройстве управления 1 и в основном предназначен для первоначального запуска системы охранной сигнализации и тестирования контроллеров и отдельных их элементов.
Режим Ведущий без фиксации. При включении питания устройства управления 1 система охранной сигнализации автоматически переходит в режим Ведущий без фиксации. В этот режим систему можно перевести из любого другого режима, выполнив на устройства управления 1 соответствующую команду.
В этом режиме система выполняет функции охранной сигнализации и функционирует по протоколу ведущий-ведомый. В качестве ведущего всегда выступает ведущий контроллер 2, а в качестве ведомых - ведомые контроллеры 5 и главный ведомый контроллер 3.
В этом режиме ведущий контроллер 2 в бесконечном цикле поочередно опрашивает:
ведомые контроллеры 5 на предмет наличия сигнала тревоги или информации для ведущего контроллера 2;
главный ведомый контроллер 3 на предмет присутствия новой информации, например, о сданных или выданных ключах или о свободных или занятых номерах.
Если такой информации в обоих типах ведомых контроллеров нет, то ведомый контроллер 3 или 5, к которому был запрос, отвечает простой командой ответа, которая указывает на то, что данный контроллер функционирует, подключен к линии связи 4 и сама линия связи 4 работоспособна (не оборвана).
Таким образом, в течение одного цикла опроса гостиницы каждый из ведомых контроллеров должен ответить один раз. Если какой-либо ведомый контроллер в течение некоторого определенного промежутка времени после приема команды от ведущего контроллера 2 не ответил, ведущий контроллер 2 в течение 3 с выдает звуковой сигнал и на индикаторе 27 высвечивает адрес этого ведомого контроллера. Тем самым система является самоохраняемой.
Каждый ведомый контроллер датчиков 5 осуществляет охрану своих номеров, сгруппированных некоторым образом, например, по этажам. Если в процессе функционирования некоторый ведомый контроллер 5 обнаружил факт несанкционированного проникновения в охраняемое помещение, например, номер гостиницы, код этого помещения будет сохранен в оперативной памяти 36 ведомого контроллера 5. Когда же ведущий контроллер 2 очередной раз обратится к этому ведомому контроллеру, последний в команде ответа в поле данных (фиг.8, б) выдаст сигнал тревоги и код помещения, в котором произошел несанкционированный доступ. Ведущий контроллер 2 включает световую и звуковую сигнализацию (тревогу), а на цифровую индикацию 27 выдает код помещения. Эта информация горит до тех пор, пока оператор кнопкой сброс тревоги 24 не сбросит текущую тревогу.
Если в процессе функционирования системы возникнет несколько тревог, все они будут зафиксированы и сохранены в оперативной памяти 12 ведущего контроллера 2 в порядке их поступления. После сброса очередной тревоги на индикацию 27 выдается код помещения, вызвавшего следующую тревогу.
Через главный ведомый контроллер 3 система выполняет отслеживание в реальном масштабе времени состояния всех охраняемых помещений, например, по наличию или отсутствию ключей от этих помещений. Эта информация по мере работы обслуживающего персонала гостиницы (портье, горничные или дежурные) накапливается в оперативной памяти микроЭВМ 48 главного ведомого контроллера 3. При запросе на изменение состояния ключей или занятости помещения от ведущего контроллера 2 информация в поле данных пакета ответа пересылается из главного ведомого контроллера 3 в ведущий контроллер 2. Затем эта информация будет передана соответствующему ведомому контроллеру датчиков 5 при запросе его ведущим контроллером 2.
Режим Ведущий без фиксации является основным режимом системы охранной сигнализации, так как система функционирует даже при отключении сетевого питания. Данная возможность обеспечивается за счет резервного аккумуляторного питания.
Режим Ведущий с фиксацией. Использование режима Ведущий с фиксацией предполагает обязательное включение устройства управления 1. Перевести систему в этот режим можно из любого другого режима, выполнив на устройстве управления 1 соответствующую команду. Данный режим полностью включает в себя режим Ведущий без фиксации с существенным дополнением, а именно: выполнение функций охранной сигнализации осуществляется с полной фиксацией в файле на диске устройства управления 1 всех происходящих на охраняемом объекте (гостинице) событий с указанием источника этого события и точного (час, минута, секунда) времени его происхождения.
К таким событиям могут относиться:
вход в систему тревожной сигнализации через пароль с указанием самого пароля;
выход из системы через пароль с указанием самого пароля (например, когда горничная перестала вводить информацию в ведомый контроллер 5 о какой-либо операции и уходит от контроллера);
попытка входа в систему через пароль с указанием самого пароля (например, если кто-либо хочет войти в систему, но не знает пароля входа);
снятие помещения с охраны с указанием этажа и его порядкового номера (после входа в систему через пароль горничная снимает это помещение для уборки, с этого момента ответственность за сохранность вещей в данном помещении берет на себя горничная);
постановка помещения на охрану с указанием этажа и его порядкового номера (после уборки помещения горничная, войдя в систему через пароль, ставит помещение на охрану, с этого момента ответственность за сохранность вещей в данном помещении берет на себя система);
открытие двери (когда дверь открывается);
закрытие двери (когда дверь закрывается);
тревога с указанием этажа и порядкового кода помещения, в котором произошло несанкционированное проникновение;
ключ сдан с указанием этажа и порядкового номера помещения (например, клиент сдает портье ключ от этого помещения);
ключ выдан с указанием этажа и порядкового кода помещения (например, если клиент данного номера берет ключ у портье);
помещение занято с указанием этажа и порядкового кода помещения;
другие события.
Данная информация фиксируется в файле на диске устройства управления 1 в реальном масштабе времени и может храниться сколь угодно долго.
Используя соответствующие команды инструментальной оболочки в устройстве управления 1, оператор может обработать любой файл фиксации и получить протокол по любой интересующей его информации (как работают горничные, когда произошла кража из помещения и т.д. и т.п.).
Для передачи информации между устройством управления 1 и ведущим контроллером 2 используется последовательный канал RS-232C. Данные передаются по каналу в последовательном коде в асинхронном режиме побайтно.
В устройстве управления 1 данную возможность обеспечивает адаптер последовательного канала i8250 фирмы Intel (США) и приемо-передатчики 1488 и 1489, которые обеспечивают согласование ТТЛ-сигнала с сигналом, определенным стандартом RS-232C.
В ведущем контроллере 2 для этой цели используется адаптер последовательного канала KP580BB51 и приемо-передатчики K170АП2 и К170УП2.
Для достоверной передачи информации между устройством управления 1 и ведущим контроллером 2 обе микросхемы настроены на один и тот же режим работы, а именно:
асинхронный режим работы;
передача по 8 бит;
скорость передачи 9600 бит/с;
контроль по четности;
два стоповых бита.
Соответствие сигналов в канале связи RS-232C между устройством управления 1 и ведущим контроллером 2 достаточно полно описано в технической литературе (D. Del Corso, H. Kirrmann, J.D. Nicond, Microcomputer Buses and Links, Academic Press, 1986, pp. 328-340).
Для передачи байта информации по каналу RS-232C необходимо передать 12 бит данных:
стартовый бит (бит Space), который указывает адаптеру 18, что началась передача очередного байта, и по которому запускается внутренний генератор адаптера 18 (фиг.2);
8 бит данных, начиная с младшего бита D0;
бит четности (бит Parity), который имеет значение "0", если число единиц в разрядах D0-D7 четное, и "1" - если нечетное;
2 стоповых бита (биты Mark), по которым адаптер 18 приходит в исходное состояние.
Для обеспечения надежной передачи информации стандарт RS-232C определяет группу управляющих сигналов. Для связи устройства управления 1 с ведущим контроллером 2 используется следующее подмножество этих сигналов:
RxD - прием данных (Received Data) -информационный вход для приема данных в последовательном формате;
TxD - выдача данных (Transmited Data) - информационный выход для выдачи данных в последовательном формате;
DTR - готовность принять данные (Data Terminal Ready) - в системе тревожной сигнализации сигнал используется для индикации состояния устройства управления 1 (включено/ выключено);
RTS - запрос готовности передать данные (Request To Send) - сигнал используется для инициализации передачи информации между ведущим контроллером 2 и устройством управления 1;
CTS - разрешение передавать данные (Clear To Send) - используется как сигнал разрешения для выдачи информации.
Обмен информацией между устройством управления 1 и ведущим контроллером 2 осуществляется посредством пакетов Запрос и Ответ, форматы которых приведены на фиг.8.
Пакет Запрос содержит следующие поля. Первый байт пакета содержит адрес контроллера (например, ведущий контроллер 2 может иметь адрес 00). Второй байт пакета содержит код команды, который может быть передан от устройства управления 1 к ведущему контроллеру 2. Фрагмент списка возможных команд для ведущего контроллера 2 дан на фиг.9. В третьем байте пакета находится счетчик байт поля данных. Следовательно, поле данных может содержать до 255 байт. Если поле счетчика равно нулю, то пакет не содержит данных для контроллера. Таким образом, минимальная длина пакета Запрос равна 3 байтам, а максимальная 258 байтам.
В ответ на любой пакет Запрос от устройства управления 1 ведущий контроллер 2 должен выдать пакет Ответ. Его структура очень похожа на структуру пакета Запрос за исключением того, что в третьем байте пакета присутствуют два битовых флага F1 и F2. Флаг F1 индицирует работу локальной сети, а флаг F2 - работу контроллеров (выполнена необходимая команда в пакете Запрос или нет). Поля адрес и код команды в пакете Ответ дублируют соответствующие поля пакета Запрос, что сделано для повышения надежности протокола связи устройство управление 1 - ведущий контроллер 2.
В табл.1 приведено описание одной из команд, а именно тест ПЗУ 14.
Ведущий контроллер 2 и все ведомые контроллеры (вспомогательные, датчиков и главный) связаны в локальную сеть типа моноканал. Данные передаются по каналу в последовательном коде в асинхронном формате передачи.
С целью повышения надежности системы по информационному входу-выходу все контроллеры гальванически развязаны между собой. Для этих целей используется импульсный трансформатор. С учетом этого, при передаче информации между контроллерами выбран специальный метод кодирования информации, называемый HP-IL. Суть данного метола кодирования хорошо описана в D. Del Corso, H. Kirrmann, J.D. Nicond, Microcomputer Buses and Links, Academic Press, 1986, и заключается в том, что логический сигнал "0" передается в линии связи 4, как +V-V•V, где +V - положительный импульс тока, например +12 В в течение 20 мкс, -V - отрицательный импульс тока, например -12 В в течение 20 мкс, •V -покой, тока нет в течение, например, 75 мкс. Логический сигнал "1" передается в линии связи 4, как -V+V•V, где -V - отрицательный импульс тока, например -12 В в течение 20 мкс, +V - положительный импульс тока, например +12 В, в течение 20 мкс, •V - покой, тока нет в течение, например, 75 мкс.
Все контроллеры, подключенные к моноканалу, для действительной передачи информации между собой настроены на один и тот же режим работы, а именно:
асинхронный (старт-стопный) формат работы;
передача по 8 бит данных;
контроль по четности;
два стоповых бита.
Время передачи одного бита при таком формате составляет от 115 до 16 мкс в зависимости от типа используемой микроЭВМ 9, 31, 48, 60, 71 (возможно использование микроЭВМ серий 1816 или 1830).
Прием информации из моноканала всеми контроллерами выполняется программным способом, однако синхронизация по первому биту осуществляется аппаратным способом - по прерыванию, которое вырабатывает преобразователь 33 (52, 63, 73).
Рассмотрим более подробно работу ведущего контроллера 2 и ведомых контроллеров 3 и 5.
Ведущий контроллер 2 (фиг.2) периодически опрашивает все ведомые контроллеры на предмет получения от них сигнала тревоги (от контроллеров датчиков 5) или информации о движении ключей (от главного ведомого контроллера 3).
Микропроцессор 9 - главный элемент схемы, который синхронизирует работу всех остальных микросхем ведущего контроллера 2 и выполняет коды команд программы, записанной в ПЗУ 14.
В ведущем контроллере 2 можно использовать микропроцессор (МП) ИМ1821 ВМ85А, который является полным аналогом МПi8085 A фирмы Intel (США) или микроЭВМ из серии КР1816 или КР1830 (аналоги серий 8048 или 8051).
Для перевода МП 9 и всех микросхем в исходное состояние используется блок сброса 10, который включает в себя простейшую RC-цепочку и кнопку сброса.
Для тактирования МП 9 используется первый генератор импульсов 8, выполненный на кварцевом резонаторе, имеющем частоту от 4 до 12 МГц. МП 9 имеет мультиплексированную 8-битную шину адрес/данные, поэтому для правильного использования микросхем памяти ОЗУ 12 и ПЗУ 14 необходим регистр-защелка 11, который осуществляет фиксирование младшего байта адреса при выполнении микропроцессором 9 команд обращения к памяти ОЗУ 12 и ПЗУ 14 и к устройствам ввода-вывода, т.е. к первому и второму таймерам 17 и 15, и последовательному и параллельному адаптерам 18 и 23. В качестве регистра-защелки 11 можно использовать микросхему КР1533ИР22.
Дешифратор старших бит адреса 13 вырабатывает сигналы выборки для периферийных микросхем 15, 17, 18, 23 или микросхем памяти 12, 14 в зависимости от адреса, по которому обращается микропроцессор 9. В ведущем контроллере 2 можно использовать дешифратор КР1533ИД 4 или ему подобный.
ОЗУ 12 предназначено для организации стековой памяти, различных счетчиков, буферов и флагов, активно используемых программой при выполнении функций охранной сигнализации, таблиц присутствия контроллеров и датчиков в системе, карт состояния номеров гостиницы и других буферов. В качестве ОЗУ 12 в ведущем контроллере 2 может стоять микросхема КР537РУ10, КР537РУ17 или любая им подобная.
ПЗУ 14 предназначено для хранения кодов команд программы, а так же для некоторых таблиц, которые не изменяют своего содержания. ПЗУ 14 в ведущем контроллере 2 может быть выполнено на микросхеме К573РФ5 или ей подобной.
Первый таймер 17 можно реализовать на микросхеме КР580ВИ53. Он предназначен для выработки тактовой серии импульсов частотой 9600 бит/с, для синхронизации работы приемника и передатчика последовательного адаптера 18, а так же для формирования сигнала с периодом 4 мс, который является сигналом прерывания для сканирования блока индикации 27 ведущего контроллера 2.
Для получения часов реального времени в ведущем контроллере 2 используется второй таймер 15, который предназначен для периодической коррекции реального времени в устройстве управления 1. В качестве часов можно использовать микросхему КР512ВИ1 или ей подобную.
Для тактирования часов реального времени используется второй генератор импульсов 16, выполненный на кварцевом резонаторе РК-72 от электронных часов, имеющем резонансную частоту 32768 Гц.
Последовательный адаптер приема-передачи данных 18 предназначен для приема данных в последовательном коде от усилителя 19 и передачи их в МП 9 и для приема данных от МП 9 и выдачи их в формирователь 22 в последовательном коде. Все это может выполнить микросхема программируемого связного адаптера КР 580 ВВ 51 А.
Так как последовательный адаптер 18 принимает и выдает ТТЛ-сигналы, то для того, чтобы принимать сигнал из канала RS-232C (который использует импульсы амплитудой +12 В и -12 В), используется буфер-усилитель 19, который можно реализовать на микросхеме 170 УП 2 или ему подобный. Для формирования выходного сигнала в стандарте RS-232C используется буфер-формирователь 22 сигналов, который можно реализовать на микросхеме 170 АП 2.
Для управления выключателем 24, светодиодным индикатором 25 и блоком индикации 27, а так же для выработки сигналов преобразователю 29, используется параллельный адаптер 23, который можно выполнить на программируемом периферийном интерфейсе КР 580 ВВ 55 А. Сканирование индикации 25 и 27 через параллельный адаптер 23 осуществляется программным способом, а вызов программы, которая выполняет сканирование - по сигналу прерывания, формируемого первым таймером 17. Выдача информации в линию связи 4 через преобразователь 29 также выполняется по сигналам, выдаваемым с параллельного адаптера 23.
Преобразователь 29 предназначен для выдачи в канал связи 4 в последовательном коде сигнала, закодированного по методу HP-IL. Преобразователь 29 так же принимает из канала связи в последовательном коде данные, закодированные в HP-IL, и передает ТТЛ-сигнал на МП 9. Преобразователь может быть выполнен по схеме (D. Del Corso, H. Kirrmann, J.D. Nicond, Microcomputer Buses and Links, Academic Press, 1986 (два ключевых транзистора и импульсный трансформатор).
Первый адаптер 26 и второй адаптер 28 - классические транзисторные ключи, которые используются для усиления сигналов блока индикации 27.
Блок индикации 27, реализованный на индикаторах, например АЛС 324 Б, и предназначен для отображения кода номера гостиницы, в который произошел несанкционированный доступ, при возникновении сигнала тревоги.
Светодиодный индикатор 25 предназначен для отображения реального состояния локальной сети и показывает на лицевой панели ведущего контроллера 2 на светодиодах последнюю выполненную ведущим контроллером 2 операцию пересылки (по отношению к ведущему контроллеру 2). Данный блок также включает и выключает световую (сигнальная лампа красного свечения) и звуковую (динамик) сигнализацию. Формирование сигналов для лампы и динамика осуществляется программно.
Выключатель 24 предназначен для оперативного сброса оператором сигнала тревоги, если таковой возник. Блок можно реализовать на кнопке НА 3.604.006 без фиксации или любой другой.
Принцип работы ведущего контроллера 2 следующий.
При включении тумблера питания напряжение +12 В поступает на вход стабилизатора, с выхода которого стабилизированные +5 В поступают на входы питания всех микросхем (стабилизатор на фиг.2 не показан).
После подачи напряжения +5 В на МП 9 сигнал, формируемый блоком сброса 10, приводит к сбросу МП 9 и переводит его в состояние, когда программа начинает выполняться с нулевого адреса. Этот же результат может быть достигнут при нажатии кнопки сброса блока сброса 10. По окончании сигнала сброса микропроцессор 9 начинает выполнять программу, записанную в ПЗУ 14.
Младший байт адреса ячейки памяти ПЗУ 14 всегда фиксируется в регистре 11 по срезу сигнала ALE, который вырабатывается МП 9.
Все промежуточные переменные сохраняются в ОЗУ 12. Чтение и запись значений переменных выполняется по сигналам читать (RD) и писать (WR) МП 9 (третья группа выходов МП 9).
Последовательный адаптер 18 обеспечивает последовательный прием по третьей группе входов и последовательную выдачу по группе выходов данных и управляющих сигналов. Все входные и выходные сигналы последовательного адаптера 18 попадают в канал RS-232C через усилитель 19 и формирователь 22 соответственно.
Второй таймер 15 определяет состояния устройства управления 1 (включен или выключен) через свой четвертый вход.
Параллельный адаптер 23 управляет выключателем 24, светодиодным индикатором 25, преобразователем 29 и блоком индикации 27 через адаптеры 26 и 28. Распределение портов адаптера 23 может быть следующее:
порт PA - выдает восьмибитовый код, который будет отображаться в данный момент времени на блоке индикации 27. Первый адаптер 26 усиливает ток, протекающий через светодиодные сегменты индикаторов блока индикации 27;
порт PB - младшие четыре разряда используются для сканирования бегающим "0" индикаторов блока индикации 27. Второй адаптер 28 усиливает общий анодный ток индикаторов блока индикации 27. Старшие разряды порта PB используются для управления транзисторными ключами динамика и сигнальной лампы светодиодного индикатора 25, а также для сброса выходного триггера преобразователя 29;
порт PC - младший разряд PCO опрашивает состояние кнопки сброса тревоги выключателя 24. Следующие два разряда управляют светодиодным индикатором 25. Старшие два разряда используются для выдачи сигналов на преобразователь 29 для формирования последовательной посылки в канал связи 4.
Управлением выборкой всех периферийных микросхем и микросхем памяти занимается дешифратор 13.
Преобразователь 29 принимает бит информации из канала связи 4 в коде HP-IL и выдает этот бит в МП 9 в виде логического ТТЛ-сигнала. Выходной триггер преобразователя 29 после окончания передачи бита по каналу связи 4 остается в состоянии, равном значению этого бита. Съем значения с преобразователя 29 осуществляется МП 9 программным способом.
Выдача бита информации в канал связи 4 в коде HP-IL преобразователем 29 также осуществляется с помощью сигналов МП 9 программным способом через параллельный адаптер 23.
Ведомый контроллер датчиков 5 рассмотрим в работе совместно с блоком сопряжения 6 (фиг.3 и 4), которые предназначены для вычисления сигнала тревоги при несанкционированном доступе в контролируемый ведомым контроллером 5 номер, путем постоянного опроса охранных датчиков 7, установленных в номерах. Ведомый контроллер 5 подключен к линии связи 4 через витую пару.
Датчики 7 являются пассивными или активными охранными датчиками, которые устанавливаются на дверной коробке или на стенке. Для этой цели могут быть использованы герконовые датчики СМК-1, СМК-2 или им подобные, датчики разбития стекла, инфракрасные или ультразвуковые датчики пассивного и/или активного действия.
Фильтры 46 являются низкочастотными фильтрами и используются для подавления низкочастотных помех. Реализовать их можно на интегрирующей RC-цепочке.
Элементы И-НЕ 45 с выходами на 3 состояния используются в качестве усилителей-формирователей и мультиплексоров одновременно, так как все их выходы объединены.
Дешифратор 44 предназначен для циклической выборки одного из элементов И-НЕ 45, благодаря чему на выходе блока сопряжения 6 всегда находятся состояния только некоторого подмножества датчиков 7 (например, 6), а следовательно шлейф между блоком сопряжения 6 и ведомым контроллером датчиков 5 имеет малое число линий.
Датчики 7 питаются напряжением +12 В (после включения тумблера питания). Сами датчики работают на размыкание, то есть, когда дверь закрыта - датчик замкнут, на входе элемента И-НЕ 45 находится сигнал логического "0", а на выходе элемента И-НЕ 45 - сигнал логической "1". Когда дверь открылась, датчик размыкается и на входе элемента И-НЕ 45 находится сигнал логической "1", а на выходе - логический "0".
В качестве элементов И-НЕ 45 можно использовать микросхему К 561 ЛН 1 или реализовать ее на транзисторных ключах.
Разрешающий сигнал для элемента И-НЕ 45 вырабатывается дешифратором 44, который можно реализовать на КР 1533 ИД 3 или ему подобный. Управляется дешифратор 44 сигналами с порта P1 микроЭВМ 31 по четырем линиям. Таким образом, блок сопряжения 6 связан с ведомым контроллером датчиков 5 шлейфом из 14 линий (8 линий данных, 4 адресные линии и 2 линии питания).
Ядром ведомого контроллера датчиков 5 является микроЭВМ 31, например КР 1816 ВЕ 35 или КР 1830 ВЕ 31. Достоинством этой микросхемы является наличие встроенного ОЗУ и портов ввода/ вывода, с помощью которых микроЭВМ 31 управляет всеми остальными узлами.
Блок сброса 32, который включает в себя RC-цепочку и кнопку сброса, используется для перевода микроЭВМ 31 в исходное состояние при включении питания или при нажатии кнопки сброса.
Для тактирования микроЭВМ 31 используется генератор импульсов 30, который можно выполнить на кварцевом резонаторе, имеющем частоту от 4 до 12 МГц.
МикроЭВМ 31 имеет мультиплексированную 8-битовую шину адрес/данные, поэтому для правильного использования микросхем памяти ПЗУ 37 и ОЗУ 36 необходим регистр-защелка 34, который осуществляет фиксирование младшего байта адреса при выполнении микроЭВМ 31 команд обращения к памяти ПЗУ 37 и ОЗУ 36 и параллельному адаптеру 38. В качестве регистра-защелки 34 можно использовать микросхему КР 1533 ИР 22. ОЗУ 36 предназначено для хранения различных буферов и счетчиков байт, буферов фиксации паролей и других флагов, активно используемых программой для вычисления тревог. В качестве ОЗУ 36 в ведомом контроллере датчиков 5 может стоять микросхема КР 537 РУ 10 или ей подобная.
ПЗУ 37 предназначено для хранения кодов команд программы, а также для некоторых таблиц, которые не изменяют своего содержания. ПЗУ 37 в ведомом контроллере датчиков 5 может быть выполнено на микросхеме К 573 РФ 5 или ей подобной.
Параллельный адаптер 38, который можно выполнить на микросхеме КР 580 ВВ 55 А, используется для управления клавиатурой 42 и блоком индикации 43. Сканирование клавиатуры 42 и блока индикации 43 через параллельный адаптер 38 осуществляется программным способом, а вызов подпрограммы, которая выполняет сканирование - по мере выполнения основного цикла программы.
Первый адаптер 40 и второй адаптер 41 используются для усиления сигналов сканирования клавиатуры 42 и блока индикации 43.
Блок индикации 43 можно реализовать на индикаторах АЛС 324 А или любых других. Блок индикации 43 предназначен для отображения кода пароля, через который горничная или дежурная входит в систему, а также для отображения полного кода номера комнаты, который горничная снимает с охраны для уборки.
Блок клавиатуры 42 предназначен для ввода горничной или дежурной пароля и полного кода номера комнаты.
Блок индикации 43 и клавиатуру 42 можно выполнить в виде выносного пульта и установить в комнате горничной в непосредственной близости от шкафа с ключами для номеров для того, чтобы после того, как горничная взяла ключи, она сразу же могла ввести информацию в ведомый контроллер датчиков 5.
Преобразователь 33 предназначен для выдачи в канал связи 4 и приема из канала связи 4 сигнала, закодированного по методу HP-IL.
Принцип работы ведомого контроллера 5 следующий.
При подаче напряжения +12 В на стабилизатор (на фиг.3 не показан) формируется стабилизированные +5 В, которые поступают на входы питания всех микросхем ведомого контроллера датчиков 5. Появление напряжения +5 В приводит к сбросу микроЭВМ 31 и переводит ее в исходное состояние. При этом программа начнет выполняться с нуля. Этот же результат может быть достигнут при нажатии кнопки сброса в блоке сброса 32. По окончании сигнала сброса микроЭВМ 31 начинает выполнять программу, записанную в ПЗУ 37.
Все промежуточные переменные сохраняются во внутренней памяти микроЭВМ 31 и во внешней памяти ОЗУ 36. Чтение и запись ячеек памяти ПЗУ 37 и ОЗУ 36 выполняется по сигналам микроЭВМ 31. Младший байт адреса ячейки памяти всегда фиксируется во внешнем регистре-защелке 34 по срезу сигнала ALE, который вырабатывается микроЭВМ 31.
Управление блоком индикации 43 и клавиатурой 42 осуществляется параллельным адаптером 38 через транзисторные адаптеры 40 и 41. Распределение портов параллельного адаптера 38, к примеру, следующее:
порт PA - чтение состояния датчиков 7 с блока сопряжения 6;
порт PB - запись восьмибитового кода, который будет отображаться в данный момент времени на блоке индикации 43. Первый адаптер 40 усиливает ток, протекающий через светодиодные сегменты индикаторов блока индикации 43;
порт PC - младшие четыре разряда используются для сканирования бегающим "0" индикаторов блока индикации 43 и клавиатуры 42. Второй адаптер 41 используется для усиления общего катодного тока и выборки горизонтальной линии клавиатуры 42. Старшие четыре разряда используются для чтения кода нажатой клавиши.
Управление выборкой микросхем памяти ПЗУ 37 и ОЗУ 36 и параллельного адаптера 38 осуществляется линиями портов микроЭВМ 31.
Работа преобразователя 33 совпадает с работой преобразователя 29 ведущего контроллера 2.
Ведомый контроллер датчиков 5 является полностью ведомым контроллером. Он не может выдать в сеть информацию, если его об этом не попросят. Обмен с ведущим контроллером 2 происходит посредством пакетов Запрос и Ответ (фиг. 8).
Главный ведомый контроллер 3 (фиг.5) предназначен для ввода через клавиатуру контроллера информации о движении всех ключей от номеров гостиницы и о состоянии номеров, когда номер освобождается клиентом или в него въезжает. Главный ведомый контроллер 3 подключен к линии связи 4 через витую пару.
Ядром схемы главного ведомого контроллера 3 является микроЭВМ 48, например КР 1816 ВЕ 35 или КР 1830 ВЕ 31. Используя управляющие сигналы с линий портов ввода/ вывода, микроЭВМ 48 управляет всеми остальными узлами главного ведомого контроллера 3.
Блок сброса 49, который включает в себя RC-цепочку и кнопку сброса, используется для перевода микроЭВМ 48 в исходное состояние при включении питания или при нажатии кнопки сброса.
Для тактирования микроЭВМ 48 используется генератор импульсов 47, выполненный на кварцевом резонаторе, имеющем частоту от 4 до 12 МГц.
Назначение регистра-защелки 50 в главном ведомом контроллере 3 - аналогичное регистру-защелке 34 в ведомом контроллере датчиков 5 (см. выше описание работы ведомого контроллера датчиков 5 и фиг.3).
ПЗУ 53 предназначено для хранения кодов команд программы, а также для некоторых таблиц. ПЗУ 53 в главном ведомом контроллере 3 выполнено на микросхеме К 573 РФ 5 или ей подобной.
Параллельный адаптер 54 может быть выполнен на микросхеме КР 580 ВВ 55 А, используется для управления клавиатурой 57 и блока индикации 58. Сканирование клавиатуры 57 и блока индикации 58 через параллельный адаптер 54 осуществляется программным способом, а вызов подпрограммы, которая выполняет сканирование - по мере выполнения основного цикла программы.
Первый адаптер 55 и второй адаптер 56 используются для усиления сигналов сканирования клавиатуры 57 и блока индикации 58.
Блок индикации 58 можно реализовать на индикаторах АЛС 324 Б или им подобным. Предназначен блок индикации 58 для отображения полного кода номера, по которому проживающий сдал или взял ключ, или который занимается или освобождается клиентом в данный момент времени.
Клавиатура 57 предназначена для ввода оператором в холле гостиницы полного кода номера и команды "Ключ сдан" иди "Ключ выдан", если проживающий сдал или взял ключ от номера в холле, и/или для ввода полного кода номера и команды "Номер занят" или "Номер свободен", если проживающий занимает или освобождает номер в данный момент.
Светодиодный индикатор 51 предназначен для отображения на светодиодах последнего выполненного оператором действия типа "Ключ" или "Номер".
Назначение преобразователя 52 в главном ведомом контроллере 3 аналогичное, что и преобразователя 33 в ведомом контроллере датчиков 5.
Принцип работы главного ведомого контроллера 3 следующий.
При включении напряжения питания +12 В стабилизированные +5 В поступают на входы питания микросхем главного ведомого контроллера 3, что приводит к сбросу микроЭВМ 48, которая переводится в исходное состояние. При этом программа начинает выполняться с нуля. Этот же результат может быть достигнут при нажатии кнопки сброса в блоке сброса 49.
По окончании сигнала сброса микроЭВМ 48 начинает выполнять программу, записанную в ПЗУ 53. Младший байт адреса ячейки памяти всегда фиксируется во внешнем регистре-защелке 50 по срезу сигнала ALE.
Все промежуточные переменные сохраняются во внутренней памяти микроЭВМ 48.
Управление блоком индикации 58 и клавиатурой 57 осуществляется параллельным адаптером 54. Распределение портов параллельного адаптера 54, к примеру, следующее:
порт PA - вывод восьмибитового кода, который будет отображаться в данный момент времени на блоке индикации 58. Первый адаптер 55 усиливает ток, протекающий через светодиодные сегменты индикаторов блока индикации 58;
порт PB - вывод разрядов, используемых для сканирования индикаторов блока индикации 58 через второй адаптер 56. Второй адаптер 56 усиливает общий анодный ток блока индикации 58;
порт PC - используются для сканирования бегающим "0" четырех горизонтальных линий клавиатуры 57. Старшие четыре разряда используются для чтения кода нажатой клавиши.
Управление выборкой памяти ПЗУ 53 и параллельного адаптера 54 осуществляется линиями портов микроЭВМ 48.
Работа преобразователя 52 совпадает с работой преобразователя 29 ведущего контроллера 2.
Главный ведомый контроллер 3 является полностью ведомым контроллером. Он не может выдать в сеть информацию, если его об этом не попросят. Обмен с ведущим контроллером 2 происходит посредством пакетов Запрос и Ответ (фиг.8).
Работа системы тревожной сигнализации для случая P не равно 0 отличается работой вспомогательных ведомых контроллеров и ведомых контроллеров датчиков 5, обусловленной отличиями в их схемах.
Вспомогательный ведомый контроллер 5 (фиг.6) отличается от ведомого контроллера датчиков 5 (фиг.3) отсутствием ОЗУ. Назначение, исполнение и работа остальных блоков аналогичны.
микроЭВМ 60 аналогична микроЭВМ 31.
Блок сброса 61 аналогичен блоку сброса 32.
Генератор импульсов 59 аналогичен генератору импульсов 30.
Преобразователь 63 аналогичен преобразователю 33.
Регистр 62 аналогичен регистру 34.
ПЗУ 64 аналогично ПЗУ 37.
Параллельный адаптер 65 аналогичен параллельному адаптеру 38.
Первый и второй адаптеры 66 и 67 аналогичны первому и второму адаптерам 40 и 41.
Блок индикации 69 аналогичен блоку индикации 43.
Клавиатура 68 аналогична клавиатуре 42.
Особенности работы вспомогательного ведомого контроллера датчиков 5 по схеме, изображенной на фиг.6, в отличие от работы вспомогательного ведомого контроллера 5, приведенного на фиг.3, заключаются в том, что вспомогательный ведомый контроллер 5 поддерживает работу клавиатуры 68 и индикации 69, а блок сопряжения 6 не поддерживает. В связи с этим во вспомогательном ведомом контроллере 5 отсутствует память ОЗУ и группы входов-выходов для связи с блоком сопряжения 6. Отличие касается также и программной части.
Ведомый контроллер датчиков 5 (фиг.7) отличается от ведомого контроллера датчиков 5 (фиг.3) присутствием второго регистра 78 и отсутствием устройств ввода-вывода: параллельного адаптера 38, первого и второго адаптеров 40 и 41, блока индикации 43 и клавиатуры 42. Остальные блоки аналогичны и по работе, и по назначению.
МикроЭВМ 71 аналогична микроЭВМ 31.
Блок сброса 72 аналогичен блоку сброса 32.
Генератор импульсов 70 аналогичен генератору импульсов 30.
Регистр 74 аналогичен регистру 34.
Преобразователь 73 аналогичен преобразователю 33.
ОЗУ 76 аналогично ОЗУ 36.
ПЗУ 77 аналогично ПЗУ 37.
Отличия в работе ведомого контроллера датчиков 5 по схеме, приведенной на фиг.7, от работы ведомого контроллера датчиков 5, изображенного на фиг.3, состоят в том, что ведомый контроллер 5 поддерживает работу блока сопряжения 6 и не поддерживает клавиатуру и индикацию.
В состав программного обеспечения системы охранной сигнализации для случая P = 0 входят:
резидентная программа-драйвер XTSR. EXE для последовательного канала RS-32C;
программа инженерного обслуживания системы IHSS.EXE;
программа ведущего контроллера 2 - SC.EX;
программа ведомого контроллера датчиков 5 - FC.EX;
программа главного ведомого контроллера 3 - KC.EX.
Для работы программы в устройстве управления 1 требуется 4 файла:
IHSS.CP - файл, содержащий фоновый экран программы;
IHSS. HLP - файл, содержащий информацию для системы контекстной помощи. Исходный текст помощи находится в файле IHSS.TXT, который после компилируется в файл IHSS.HLP. Сам файл IHSS.TXT в системе не используется;
IHSS.INC - файл настройки программного инженерного обслуживания и содержит некоторую специфическую конфиденциальную информацию;
IHSS.PCX - файл цветной заставки-символа гостиницы.
Программа XTSR.EXE предназначена для оперативного обмена информацией через последовательный канал связи RS-232 C между ведущим контроллером 2 и программой инженерного обслуживания IHSS.EXE в устройстве управления 1.
Управление сигналами в канале RS-232 C обеспечивается посредством доступа к внутренним регистрам микросхемы 18250 фирмы Intel.
Перед тем как использовать возможности программы XTSR.EXE, ее необходимо разместить в оперативной памяти устройства управления 1. Для этого программу необходимо запустить в работу, выполнив с помощью команд операционной системы следующее:
CD \FIX <Enter>
XTSR <Enter>
После запуска программы XTSR.EXE выполняется настройка адаптера i8250 с выводом параметров настройки на экран монитора. По окончании настройки управление передается оболочке Norton Commander, хотя сама программа XTSR в оперативной памяти устройства управления 1 остается.
Программа XTSR постоянно находится в оперативной памяти и может быть вызвана двумя способами. Во-первых, если через программу инженерного обслуживания системы оператор хочет передать некоторую команду какому-либо контроллеру. В этом случае команда записывается в специальный буфер передачи команды и вызывается программное прерывание, по которому располагается программа XTSR. Программа XTSR выбирает из буфера первый байт команды и после анализа состояния канала RS-232 C выдает этот байт в микросхему i8250. Когда байт в последовательном коде будет выдан в канал, i8250 сформирует прерывание, по которому опять вызывается программа XTSR для выдачи из буфера второго байта команды. Так повторяется до тех пор, пока вся команда не будет передана по каналу RS-232 C ведущему контроллеру 2.
Во-вторых, если система работает в режиме Ведущий с фиксацией. В этом режиме ведущий контроллер 2 сам может быть инициатором передачи информации в устройство управления 1. Как только первый байт этой информации будет принят приемником i8250, последняя вырабатывает сигнал прерывания и управление передается программе XTSR. Программа считывает байт данных из микросхемы i8250, обрабатывает его записывает в свой буфер и возвращает управление операционной системе устройства управления 1, оставаясь при этом в оперативной памяти.
Для связи программы IHSS.EXE с программой XTSR используется прерывание по вектору 61H. При этом программа XTSR выполняет функцию, код которой передается ему в регистре AH.
Когда система тревожной сигнализации работает в режиме Ведущий с фиксацией, любое изменение состояния оконечного элемента (открытие или закрытие двери, вход через пароль и т.д.) фиксируется в файле фиксации на диске в устройстве управления 1. Любой файл фиксации имеет строго определенную структуру и состоит из множества n-байтовых записей. Каждая запись также имеет фиксированную структуру.
Программа IHSS. EXE предназначена для организации интерфейса с системой тревожной сигнализации гостиницы, для ее настройки и эксплуатации. Интерфейс с системой организуется при помощи пакетов Запрос, передающихся ведущему контроллеру 2 и принимаемых затем пакетов Ответ. Все множество пакетов можно условно разделить на три класса:
команды, запрашивающие какую-либо информацию о состоянии системы и ее конфигурации;
команды, устанавливающие какие-либо параметры системы;
команды, инициирующие выполнение каких-либо тестов для проверки работоспособности системы.
Интерфейс с пользователем основан на использовании трехуровневой системы меню, с помощью которой пользователь может выбрать определенную команду управления системой. Необходимая информация вводится с помощью блоков диалога (DIALOG BOXES), затем формируется и передается команда, принимается ответ и выводится в удобной для пользователя форме.
После запуска программа IHSS читает с диска необходимые файлы и затем спрашивает пароль для входа в систему. При правильном вводе пароля на экране монитора появляется главное меню, главный фон меню и адрес разработчика. Оператор может с помощью клавиш Стрелка влево и Стрелка вправо выбрать нужную команду и выполнить ее, нажав клавишу RETURN.
Программа для ведущего контроллера 2 построена таким образом, что:
прием информации от устройства управления 1 с последовательного канала связи RS-232 C осуществляется аппаратным способом через последовательный адаптер 18, который после приема всего байта из канала вырабатывает запрос прерывания на вход 5 МП 9;
выдача информации на устройство управления 1 в последовательный канал связи RS-232 C осуществляется также последовательным адаптером 18 аппаратным способом, вывод байта в последовательный адаптер 18 выполняется по мере необходимости программным способом;
прием информации от ведомого контроллера датчиков 5 или главного ведомого контроллера 3 с линии связи 4 осуществляется программным способом, причем подпрограмма приема байта вызывается по запросу прерывания, который формируется при поступлении стартового бита принимаемого байта. Запрос прерывания подается на вход 6 МП 9;
выдача информации в линию связи 4 осуществляется программным способом, причем подпрограмма выдачи байта вызывается по мере необходимости программным способом;
сканирование индикаторов выполняется программным способом, а начало сканирования - по запросу прерывания от таймера 17 с первого канала. Запрос прерывания вырабатывается с частотой 0,25 кГц и подается на вход 4 МП 9.
Опишем вкратце программу для ведущего контроллера 2.
Вначале идет определение различных флагов, используемых в программе (табл. 2).
При включении питания первой выполняется команда jmp Start и начинает выполняться главная программа. Инициализируется стек для точек возврата из подпрограммы, определяется тип старта программы (табл.3).
Очищается индикатор, устанавливаются в исходное положение различные указатели и счетчики, обнуляются флаг и счетчик приема с устройства управления 1 и устанавливается адрес первого опрашиваемого ведомого контроллера (табл.4).
Далее осуществляется настройка внешних устройств (табл.5)
и снимаются маски со всех прерываний и разрешается обработка прерываний (табл.6).
После этого начинается основной цикл программы Loop, в котором выполняется проверка принятия пакета Запрос с устройства управления 1. Если пакета нет или она принята еще не полностью, проверяется состояние тревоги и кнопки Сброс тревоги. Затем проверяется статус ведущего контроллера 2 - режим Ведомый или нет. Если контроллер Ведомый, то цикл Loop повторяется.
Если цикл опроса всех ведомых контроллеров не закончен, наращивается номер опрашиваемого ведомого контроллера. Если цикл опроса закончен, устанавливается адрес первого опрашиваемого ведомого контроллера. Сразу же по таблице проверяется подключение текущего контроллера к сети и, если он не подключен, то цикл Loop повторяется.
Если контроллер подключен к сети, то программа ведущего контроллера 2 запрещает выдачу информации устройством управления 1, делает задержку 15 мс и опрашивает текущий ведомый контроллер. После этого разрешается выдача информации устройству управления 1, и цикл Loop повторяется бесконечно.
Если пакет Запрос с устройства управления 1 принят полностью, осуществляется проверка на наличие ошибок при приеме и, если таковых нет, то принятая информация пересылается из буфера приема в буфер приема/передачи для ведомых контроллеров, и команда выполняется.
Если пакет принят с ошибкой, то внутренние счетчики увеличиваются и указатели восстанавливаются в исходное состояние, сбрасываются флаги ошибок и в буфере формируется команда с кодом ошибки (флаг F1 устанавливается в "1"), которая затем и исполняется.
Прием пакета Запрос с устройства управления 1 осуществляется программой Input 51, которая вызывается в ответ на запрос прерывания по входу 5 МП 9. Как только первый байт принят последовательным адаптером 18, формируется запрос на прерывание и по нему вызывается подпрограмма Input 51.
При этом содержимое всех регистров сохраняется в стеке, настраивается внутренний таймер и указатель на буфер приема и далее проверяется наличие байта в приемнике (табл.7).
Если байта еще нет в приемнике адаптера 18, программа идет по внутреннему таймеру, и если по истечении времени байта нет, осуществляется выход из подпрограммы. Когда байт находится в приемнике адаптера 18, он считывается в буфер приема Buf 6, и происходит проверка на ошибки.
Если ошибки есть, то устанавливается признак ошибки и происходит выход из подпрограммы. Если ошибок нет, происходит подготовка к приему следующего байта и проверка количества принятых байт.
Если заголовок пакета Запрос еще не принят, то прием продолжается. Если заголовок пакета принят, то программа перенастраивается на прием поля данных пакета (если оно есть) и продолжает прием.
Как только приняты все байты пакета от устройства управления 1, устанавливается признак полного приема пакета от устройства управления 1. После этого восстанавливается содержимое всех регистров, разрешаются прерывания и управление возвращается в точку вызова подпрограммы Input 51.
После приема всего пакета из устройства управления 1 вызывается подпрограмма MBuf, по которой осуществляется пересылка принятой информации из буфера приема в буфер ввода/вывода InOutBf. Для этого устанавливается счетчик принятых байт, настраиваются указатели на начало обоих буферов и затем побайтно данные переписываются из одного буфера в другой до тех пор, пока счетчик не обнулится.
Когда принятая информация окажется в буфере InOutBf, вызывается подпрограмма DoCmd, которая вначале определяет, кому адресован пакет: ведущему контроллеру 2 или ведомому контроллеру. Если пакет адресован ведущему контроллеру 2, то команда исполняется им.
Для передачи пакета Ответ в устройство управления 1 сначала проверяется активность (наличие включенного) самого устройства управления 1. Если оно выключено, то ведущий контроллер 2 автоматически переходит в режим "Ведущий без фиксации", сбрасывает ошибки и выходит из подпрограммы.
Если устройство управления 1 включено, то содержимое всех регистров сохраняется в стеке, устанавливается признак ошибки, настраивается счетчик передаваемых байт и внутренний таймер. Далее по готовности передатчика последовательного адаптера 18 данные из буфера InOutBf выдаются в канал RS-232 C.
После выдачи всей посылки содержимое всех регистров восстанавливается и управление возвращается в точку вызова подпрограммы.
Если принятая ведущим контроллером 2 посылка от устройства управления 1 адресована не ведущему контроллеру 2, то пакет Запрос ретранслируется в канал сети по линиям связи 4 для ведомых контроллеров. Для этого вызывается подпрограмма SayFC, которая вначале сохраняет в стеке содержимое используемых регистров, настраивает счетчик байтов и указатель на буфер InOutBf и запрещает обработку всех прерываний. Это необходимо сделать, так как выдача байт в канал сети осуществляется программным способом и его прерывать нельзя. После этого байт за байтом пакет передается в канал сети.
Когда выданы все байты пакета, преобразователь с помощью подпрограммы ImFCIn настраивается на прием пакета Ответ от ведомых контроллеров, а содержимое всех регистров восстанавливается.
Выдача байта в канал сети осуществляется программным способом с помощью подпрограммы SndByte, при этом:
в стеке сохраняется содержимое регистров;
настраиваются счетчики и вычисляется бит паритета;
выдается стартовый бит;
выдаются биты байта данных;
выдается бит паритета;
выполняется временная задержка для получения в канале стоповых бит;
восстанавливается содержимое регистров.
Выдачу в канал сети самого байта данных выполняет подпрограмма SendBit.
После того, как ведущий контроллер 2 выдал в линии связи 4 пакет Запрос, он сразу же настраивает преобразователь 29 на прием с помощью подпрограммы IniFCIn. Для этого необходимо запретить прерывания, сбросить в исходное состояние триггер приема бита преобразователя 29, сбросить внутренний триггер приема запроса прерывания по входу 6 МП 9 и опять разрешить прерывания.
Только после всех этих манипуляций преобразователь 29 готов к приему первого байта пакета Ответ от одного из ведомых контроллеров датчиков 5 или от главного ведомого контроллера 3.
После выдачи в линию связи 4 пакета Запрос ведущий контроллер 2 сразу же переходит в состояние ожидания приема пакета Ответ, вызвав подпрограмму AskFC. Вначале подпрограммы осуществляется инициализация цикла обмена, устанавливается счетчик байт и указатель приемного буфера, разрешается прием байта и запускается внутренний таймер. Одновременно проверяется флаг mfBfRDY, указывающий на прием байта данных из линии связи 4.
Если время таймера истекло, а байт данных не принят, устанавливается признак ошибки и происходит выход из подпрограммы. Если байт данных принят, то он сохраняется в буфере и проверяется -принят ли заголовок пакета. Если не принят, то цикл повторяется с перезапуском таймера. Если заголовок пакета принят, то при наличии поля данных в пакете Ответ осуществляется прием и данных. В противном случае сбрасываются флаги данного цикла обмена и происходит возврат из подпрограммы.
Прием байта из линии связи 4 осуществляется программным способом подпрограммой rst75. Вызов же самой подпрограммы выполняется по прерыванию. Подпрограмма rst75 написана таким образом, что момент съема бита байта с линии связи 4 попадает точно в середину временного интервала, когда в сети находится бит. Это возможно благодаря тому, что известна тактовая частота работы процессора, время выполнения любой команды и скорость передачи информации по линии связи 4.
После приема всего байта выполняется проверка на паритет для надежности передачи, и если паритет совпадает, принятый байт сохраняется в приемном буфере и устанавливается флаг готовности байта mfBtRDY.
Затем осуществляется инициализация преобразователя 29, разрешается обработка прерываний и осуществляется возврат из подпрограммы.
Программа для ведомого контроллера датчиков 5 построена таким образом, что:
прием информации от ведомого контроллера датчиков 5 или главного ведомого контроллера 3 с линии связи 4 осуществляется программным способом, причем подпрограмма приема байта вызывается по запросу прерывания, который формируется при поступлении стартового бита принимаемого байта; запрос прерывания подается на вход 6 микроЭВМ 31 (или 48, 60, 71);
выдача информации в линии связи 4 осуществляется программным способом, причем подпрограмма выдачи байта вызывается по мере необходимости программным способом;
сканирование индикаторов и клавиатуры выполняется программным способом по мере вызова подпрограммы сканирования;
в остальное время, свободное от приема, выдачи и сканирования, программа выполняет опрос состояния всех датчиков и вычисляет сигнал тревоги.
Рассмотрим программу ведомого контроллера датчиков 5.
Вначале идет определение флагов и мнемонических имен, используемых в программе (табл.8).
При включении питания первой выполняется команда и начинает выполняться главная программа. Настраивается параллельный адаптер 38, инициализируются его порты PC и PB, обнуляется внутренняя память данных микроЭВМ 31, очищается буфер индикации и ячейки внешнего ОЗУ 36, а также инициализируется преобразователь 33. После этого разрешается обработка запросов прерываний (табл.9).
Основной цикл программы mnLoop включает в себя следующие подпрограммы (табл.10).
Если никакая клавиша не нажата, то этот цикл повторяется снова. Рассмотрим подробнее каждую из этих подпрограмм, учитывая описанное выше.
Опрос наличия пакета Запрос от ведущего контроллера 2 выполняется подпрограммой AskSC по флагу mfBtRDY. Если флаг равен "0", то пакет еще не принят и управление возвращается в основной цикл. Когда флаг mfBtRDY равен "1", что означает окончание принятия пакета Запрос от ведущего контроллера 2, начинается обработка принятой команды на определение кода команды и передача управления на соответствующую ветку для исполнения ее.
Для перехода на соответствующую ветвь используется таблица смещения векторов AdrTab и таблица переходов JmpTab.
После выполнения принятой команды, например команды отклика Answer, формируется пакет Ответ для ведущего контроллера 2 в выходном буфере, затем этот пакет выдается в линию связи 4 по подпрограмме SaySC (табл.11).
Настраивается счетчик передаваемых байт и запрещается обработка внешнего прерывания (табл.12).
Затем байт за байтом данные из выходного буфера, косвенно адресуемые регистром RO, будут выданы в линии связи 4 подпрограммой OutByte.
После этого очищается счетчик принимаемых байт InCnt, инициализируется преобразователь 33 и разрешается обработка внешнего прерывания (табл.13).
Прием пакета Запрос ведомым контроллером датчиков 5 из линий связи 4 осуществляется программным способом подпрограммой InByte, которая вызывается аппаратно стартовым битом первого байта пакета (запросом прерывания по входу 6 микроЭВМ 31) и командой jmp InByte (адрес вектор прерывания по входу 6 равен 3).
В самом начале программы жестко выдерживаются временные задержки, так как байт пакета в линии связи 4 уже есть и его надо бит за битом принимать. Прием байта ведомым контроллером датчиков 5 похож на прием ведущим контроллером 2, поэтому приведем только текст программы (табл.14).
Когда весь байт принят, вычисляется паритет байта (табл.15)
и сравнение его с принятым паритетом (табл.16).
Если паритеты не равны, устанавливается признак ошибки (табл. 17).
В противном случае запускается таймер и определяется начало этого пакета или нет. Если таймер переполнен, то это начало нового пакета, а значит нужно инициализировать счетчик приема байт InCnt (табл.18).
И начинается определение адреса ведомого контроллера. Это необходимо делать обязательно, так как пакеты из линии связи 4 принимают все ведомые контроллеры датчиков 5 и главный ведомый контроллер 3, но она предназначена только одному ведомому контроллеру.
Когда принимается первый байт пакета (адрес контроллера), то сразу же определяется: "Посылка мне?". Если "Да", то устанавливается признак mfSelf ("Посылка моя"), если "Нет" - признак не устанавливается (табл.19).
Далее производится прием 3-х байт заголовка пакета и анализ на наличие в пакете поля данных. Если данные для ведомого контроллера датчиков 5 есть, то они также принимаются.
После обнаружения конца пакета ведомый контроллер датчиков 5 определяет -ему ли предназначен принятый пакет. Если пакет не ему, счетчик приема байт InCnt обнуляется. В противном случае устанавливается флаг принятия посылки mfBtRDY и останавливается внутренний таймер (табл.20).
В конце подпрограммы инициализируется преобразователь 33 и разрешается обработка внешнего прерывания (табл.21).
Подпрограмма съема значений датчиков 7 выполняет чтение их состояния в буфер состояния номеров этажа и фиксацию факта изменения состояния двери номера, если включен режим Ведущий с фиксацией. Датчики 7 подключены к цифровой части ведомого контроллера датчиков 5 через блок сопряжения 6.
Обработка считанных значений датчиков 7 осуществляется побитно. Для этого выбирается страница номеров ОЗУ 36, где хранятся последние значения всех датчиков 7, устанавливается счетчик обработки бит и выделяется первый датчик. Далее считанное значение этого датчика сравнивается со значением этого датчика, хранящимся в ОЗУ 36. Если значение датчика не равно биту в памяти, в память записывается новое значение датчика и затем вычисляется сигнал тревоги по данному номеру подпрограммой StatDD.
Затем проверяется состояние, в котором работает система, и если используется режим Ведуший с фиксацией, факт открытия или закрытия двери с кодом номера этого датчика фиксируется в буфере фиксации FixBuf.
Так повторяется до тех пор, пока все датчики не будут обработаны.
Сигнал тревоги по номеру i вычисляется подпрограммой StatDD по следующему алгоритму:
Alarm = \XDi• GDi•KDi•\DDi,
где XDi - поле подключения номера i;
GDi - поле установки защиты горничной номера i;
KDi - поле наличия ключа по номеру i;
DDi - состояние датчика номера i.
Если сигнал Alarm равен "0", то тревоги по номеру i нет и управление возвращается в точку возврата, иначе начинается обработка тревоги.
Определяется режим работы системы тревожной сигнализации - с фиксацией или без фиксации. Если фиксация событий выключена, то сигнал тревоги сохраняется в буфере тревог. Если фиксация включена, то событие "Тревога" фиксируется в буфере событий FixBuf и в последующем будет передано ведущему контроллеру 2, а через него в устройство управления 1.
Остальные подпрограммы являются вспомогательными и не так сложны в понимании, как описанные выше. Поэтому они не описаны.
Программа для главного ведомого контроллера 3 построена таким образом, что:
прием информации от ведущего контроллера 2 с линии связи 4 осуществляется программным способом, причем подпрограмма приема байта вызывается по запросу прерывания, который формируется при поступлении стартового бита принимаемого байта. Запрос прерывания подается на вход 6 микроЭВМ 48;
выдача информации в линию связи 4 осуществляется программным способом, причем подпрограмма выдачи байта вызывается по мере необходимости программным способом;
сканирование блока индикации 58 и клавиатуры 57 выполняется программным способом по мере вызова подпрограммы сканирования.
Все описанное ниже относится к программе для главного ведомого контроллера 3.
Вначале идет определение флагов и мнемонических имен, используемых в программе, а именно:
адреса параллельного адаптера 54;
маски состояния главного ведомого контроллера 3;
маски порта P1 и P2 микроЭВМ 48;
При включении питания первой выполняется команда jmp Start и начинает выполняться главная программа. Инициализируется преобразователь 52 и порт P2 микроЭВМ 48, настраивается параллельный адаптер 54, очищается буфер блока индикации 58. После этого разрешается обработка запроса внешнего прерывания (табл.22).
Основной цикл программы mnLoop включает в себя следующие подпрограммы (табл.23).
Если никакая клавиша не нажата, то этот цикл повторяется снова. В противном случае определяется код нажатой клавиши и выполняется соответствующее действие.
Учитывая подробное описание работы программ для ведущего контроллера 2 и ведомого контроллера датчиков 5, данное выше, а также то, что структура программы главного ведомого контроллера 3 отличается от структуры программы для ведомого контроллера датчиков 5 в незначительных деталях, причем в сторону упрощения, а часть программы, отвечающая за ввод информации из линии связи 4 вообще не отличается, эта часть программы не приводится.
Описанная выше система изготовлена и функционирует. Все контроллеры реализованы в основном на микросхемах 5-х комплектов: ИМ 1821, КР 1816, КР 580, КР 1830 и КР 1533. Микросхемы памяти взяты из серий КР 537 и КР 573. Такой выбор серий интегральных микросхем обусловлен их легкодоступностью и дешевизной. При этом ток потребления в среднем на один контроллер составляет около 250 мА. Возможно использование более современной элементной базы, а именно: серии КР 1834, КР 1850, а также более активного использования 4-х битовых однокристальных микроЭВМ серии КР 1820, КА 1013, К 1867 ВМ 1 и других новейших комплектов. Это позволяет довести ток потребления на один контроллер до уровня 10-15 мА, а также уменьшить количество микросхем средней и малой степени интеграции. Все это, в конечном итоге, приводит к повышению надежности системы и уменьшению ее стоимости.
Учитывая настоящую тенденцию к постепенному повышению стоимости сложной оргтехники, возможна реализация устройства управления 1 на базе IBM-совместимого бытового компьютера МК-88, выпускаемого Минским ПО вычислительной техники, или на базе бытового компьютера типа Sinclair.
И в том, и в другом случае бытовые компьютеры должны иметь цветной монитор (телевизор), один карман для гибкого диска, клавиатуру и адаптер канала RS-232C.
Модификация ведомого контроллера датчиков может выполняться по нескольким направлениям:
использовать новую элементную базу;
блок сопряжения 6 реализовать на дискретных элементах (транзисторах) для повышения надежности и ремонтопригодности;
увеличить возможности системы за счет нескольких алгоритмов охраны номерного фонда гостиницы.
Возможная модификация главного ведомого контроллера 3 заключается в достыковке к контроллеру микропринтера, необходимого для оперативного фиксирования на бумаге действий операторов в холле гостиницы (где находятся ключи).
Повышение скорости реагирования на несанкционированное проникновение в охраняемую зону (номер гостиницы) происходит за счет обслуживания одним ведомым контроллером некоторой группы датчиков номеров (например, один контроллер - один этаж гостиницы). Возникшая тревога в одном из номеров гостиницы этой группы будет зафиксирована в ведомом контроллере и после обращения к нему ведущего контроллера передана на центральный пульт охраны. Время реагирования ведомого контроллера на несанкционированное проникновение при использовании элементной базы серии КР 1816 находится в диапазоне от 100 мкс (в благоприятном случае) до 3 мс (в неблагоприятном случае), что зависит от расстояния между ведомым контроллером и контролируемыми им номерами, а также от расстояния между ведущим, главным ведомым и ведомыми контроллерами.
Так, если скорость распространения информации по каналу между контроллерами порядка 9000 бит/с, а обмен информацией между контроллерами осуществляется 3-байтовыми пакетами, то тревога при проникновении в номер раздается на центральном пульте через время от 0,01 с (в благоприятном случае ) до 0,7 с ( в неблагоприятном случае). Это время может незначительно изменяться как в сторону уменьшения, так и увеличения в зависимости от количества ведомых контроллеров и количества номеров, контролируемых одним контроллером. Если время реагирования увеличивается до одной секунды, за счет перераспределения количества ведомых контроллеров и номеров в группе, обслуживаемых одним контроллером, это время уменьшается.
При использовании элементной базы серии микросхем КР 1830 время обнаружения тревоги ведомым контроллером уменьшается до интервала от 10 до 300 мкс. В этом случае, при скорости обмена информацией по каналу связи около 65000 бит/с время реагирования на несанкционированный доступ на центральном пульте составит от 0,001 до 0,1 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ДОСТУПА И ОХРАННОЙ СИГНАЛИЗАЦИИ | 1999 |
|
RU2161333C1 |
| Распределенная система управления | 1989 |
|
SU1732345A1 |
| КОМПЛЕКТ АППАРАТУРЫ АВТОМАТИЗИРОВАННОЙ ТЕЛЕФОННОЙ СТАНЦИИ СИСТЕМЫ ОХРАННО-ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 2000 |
|
RU2194369C2 |
| Устройство защиты и автоматики распределительной подстанции | 1988 |
|
SU1584023A1 |
| Устройство для отладки программ микроЭВМ | 1989 |
|
SU1815643A1 |
| Автоматизированная система для круглогодичного наблюдения за жизнедеятельностью пчелиных семей | 1988 |
|
SU1588344A1 |
| КОНТРОЛЛЕР | 1991 |
|
RU2012043C1 |
| СИСТЕМА КОММУТАЦИИ ПРОЦЕССОРОВ | 1991 |
|
RU2006931C1 |
| Многопроцессорная вычислительная система | 1987 |
|
SU1792540A3 |
| Многоканальное устройство управления шаговым двигателем | 1990 |
|
SU1789970A1 |
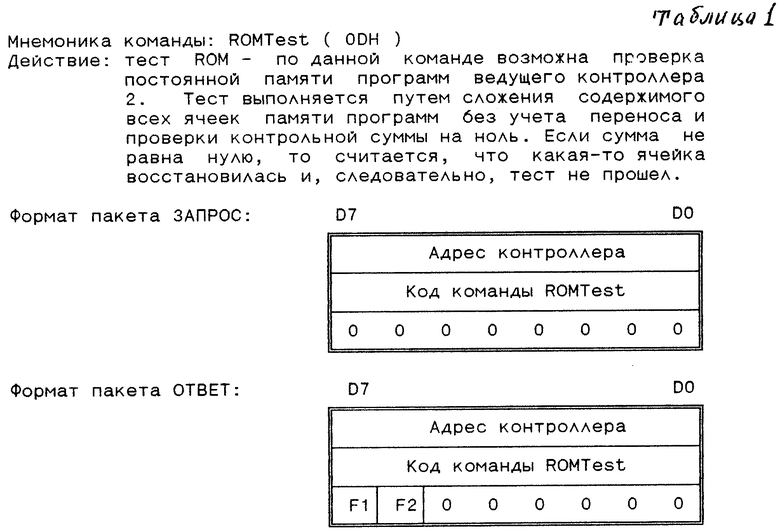
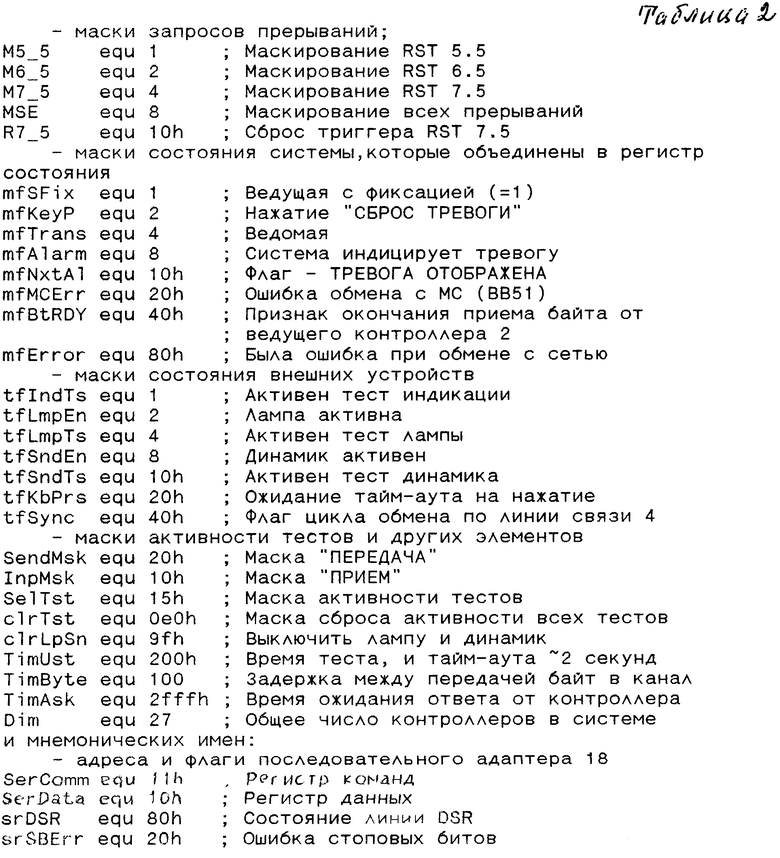
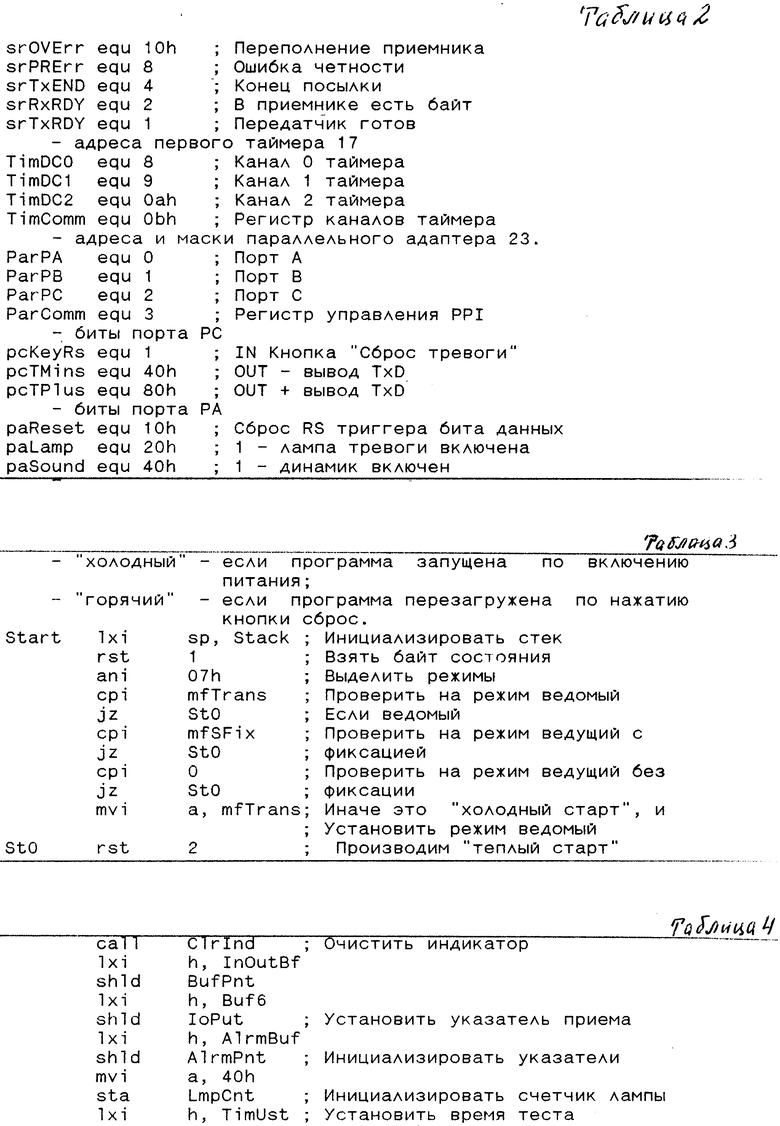
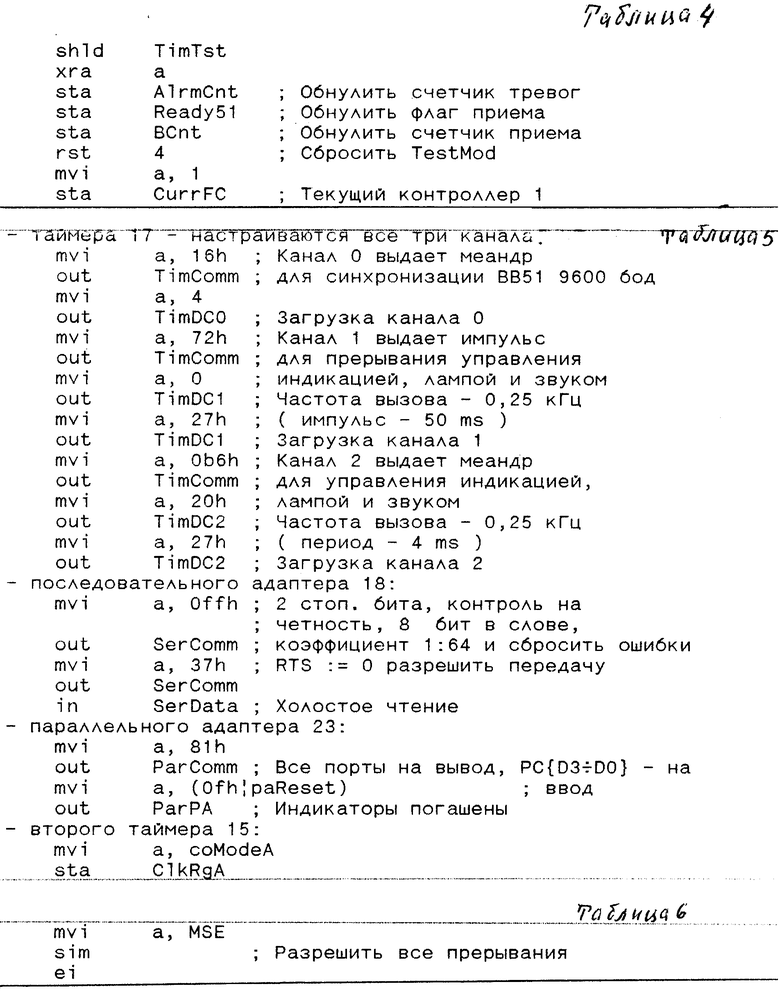
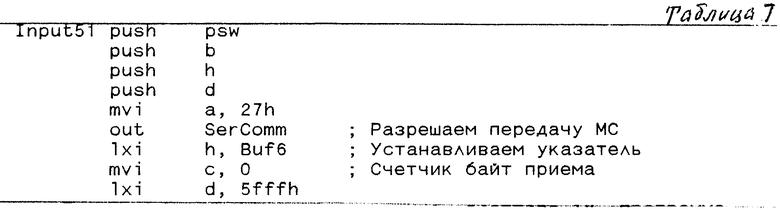

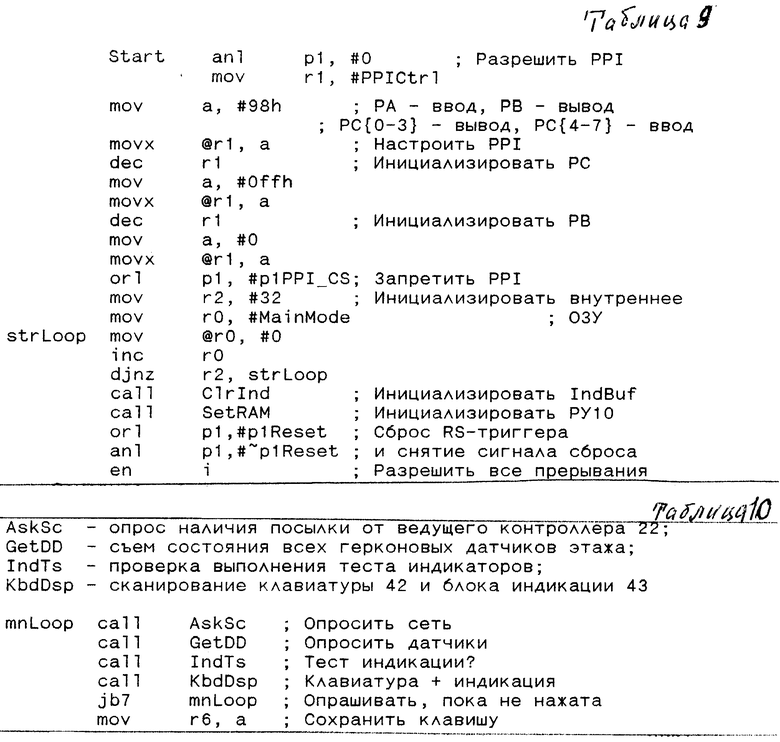
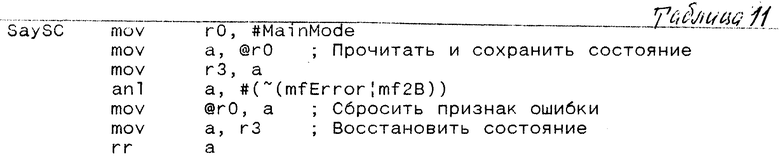
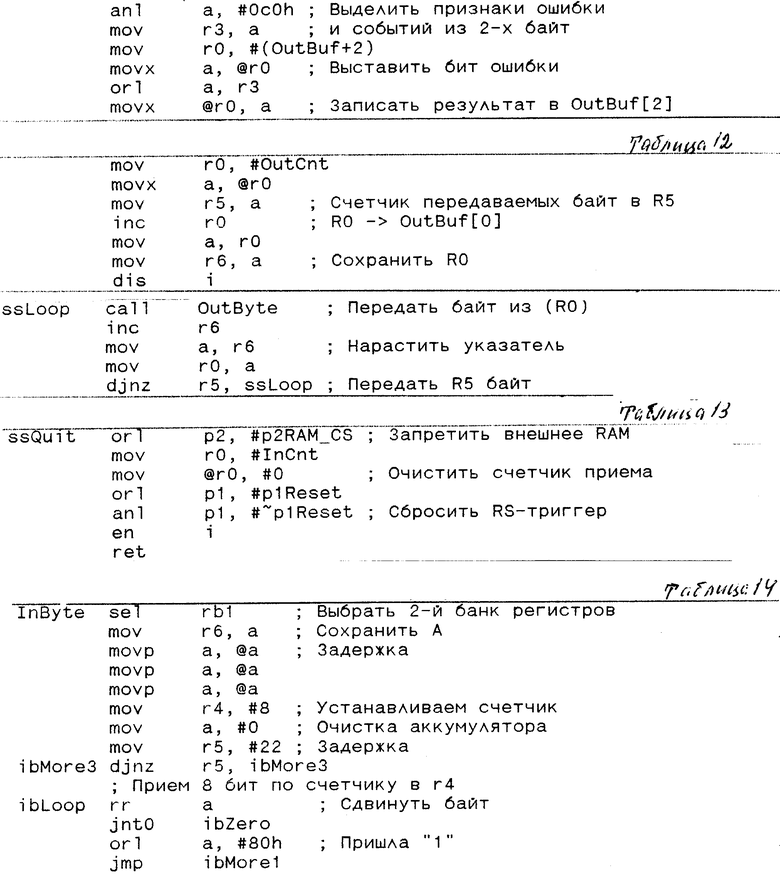
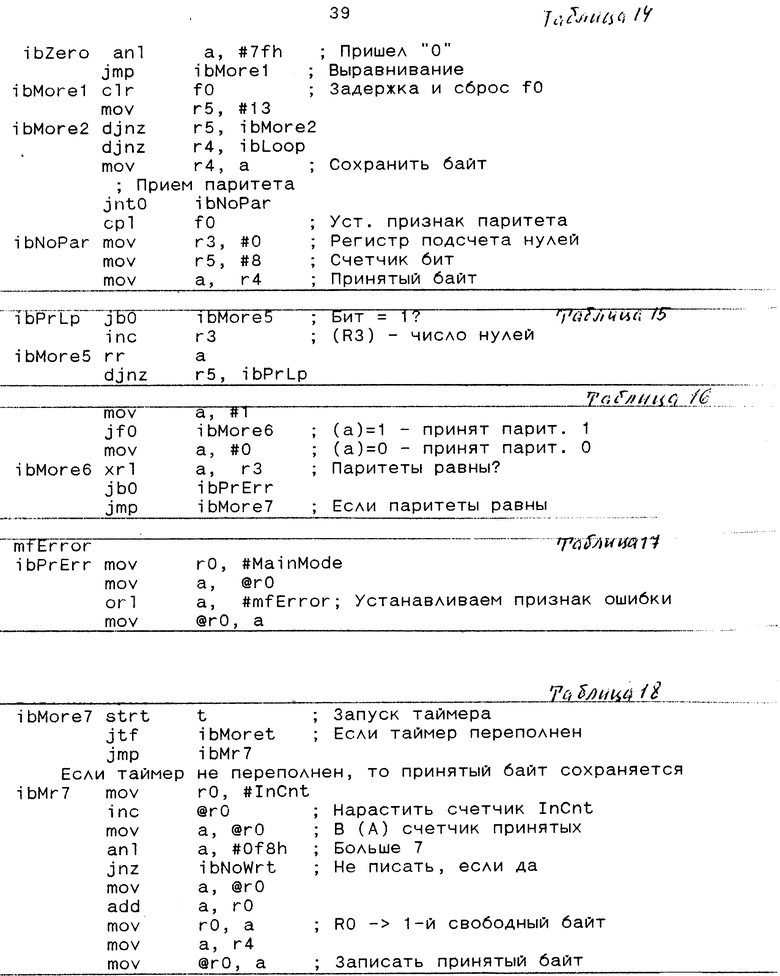

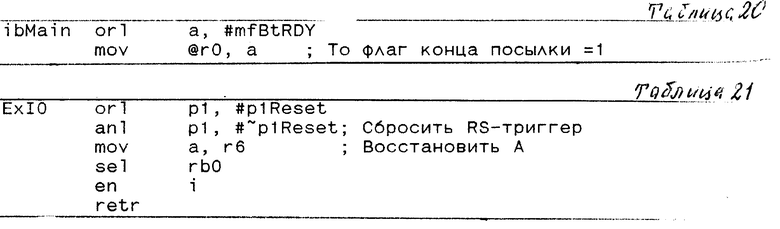
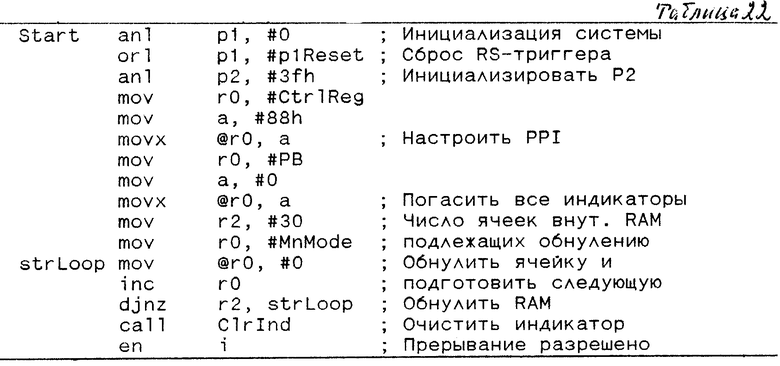
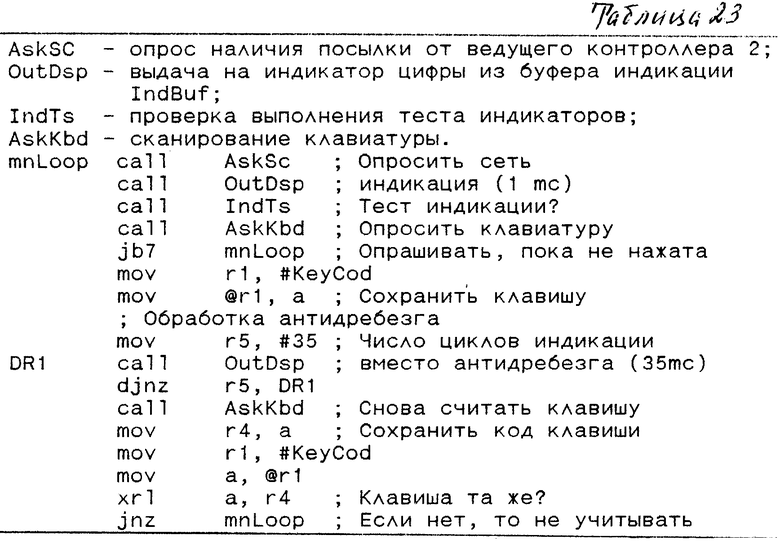
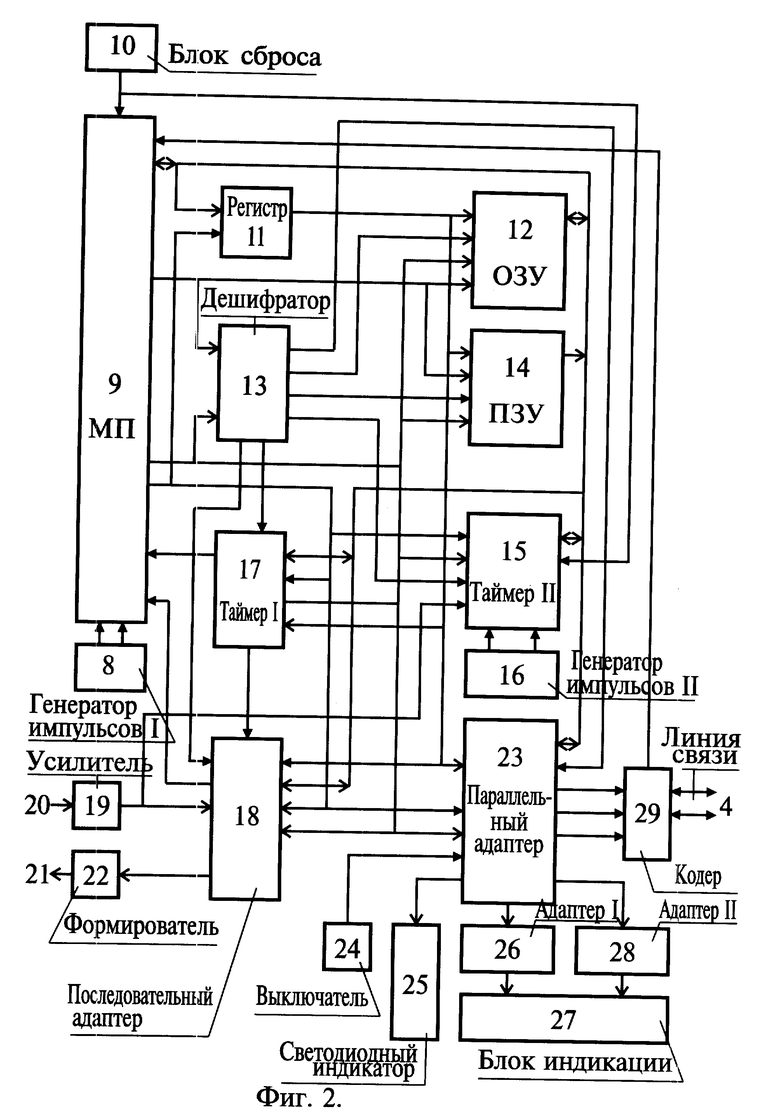
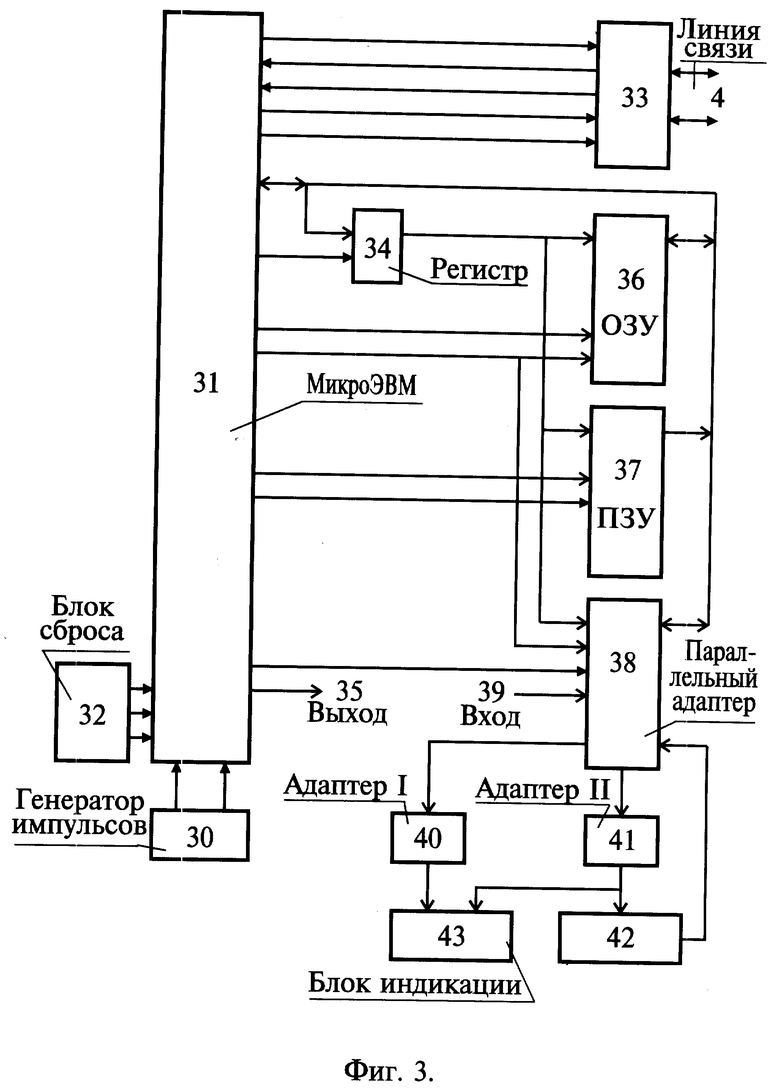
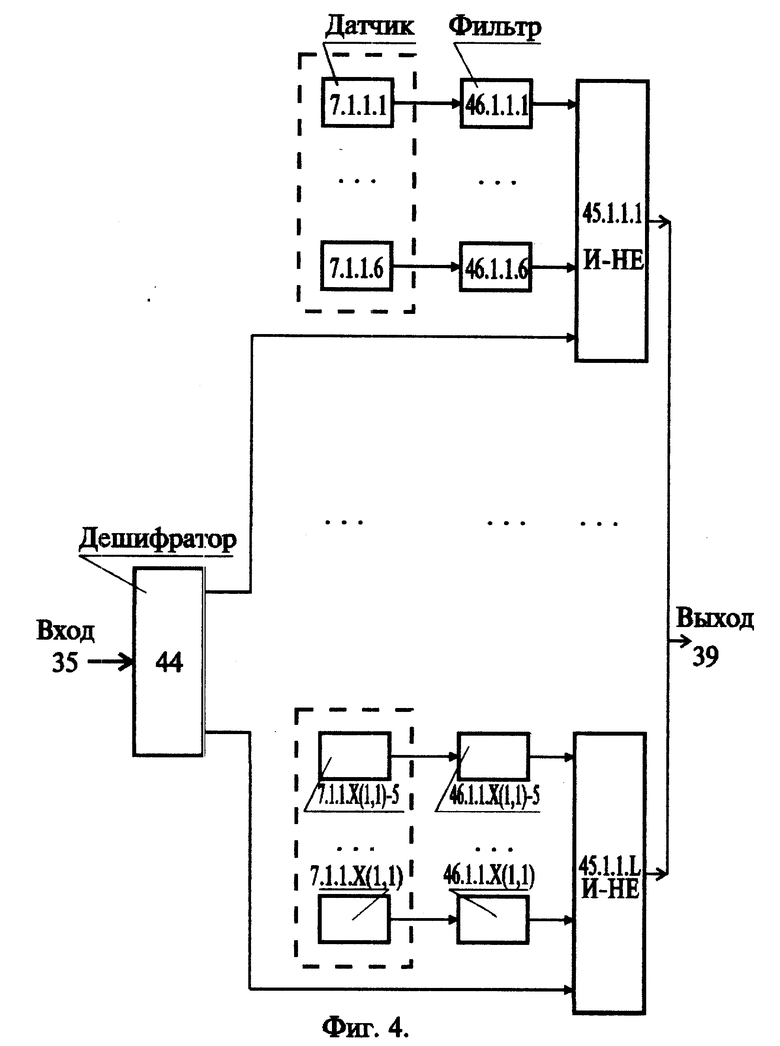
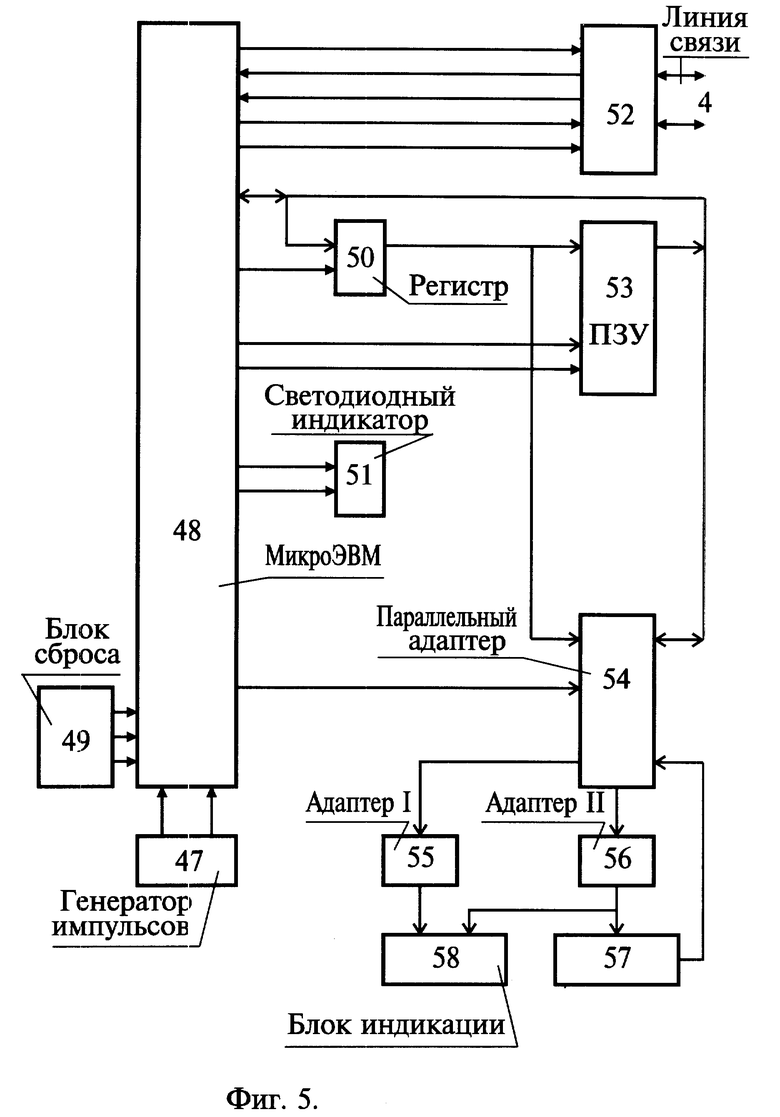
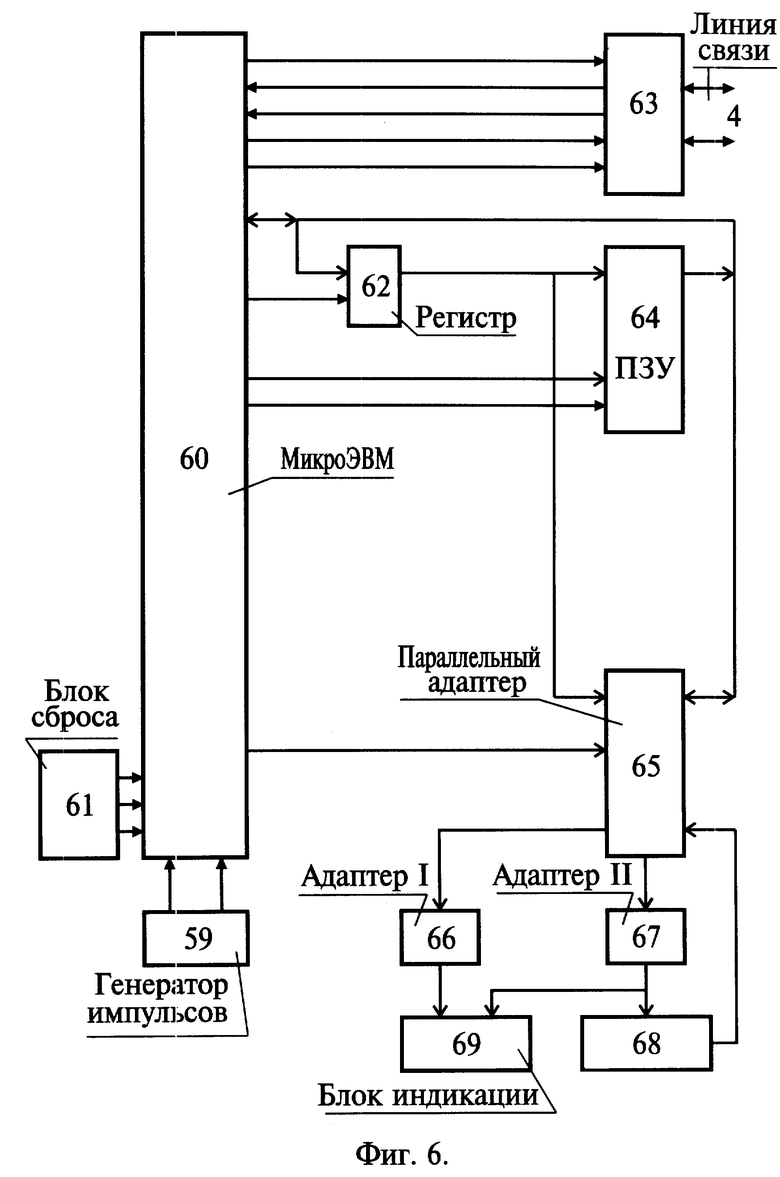
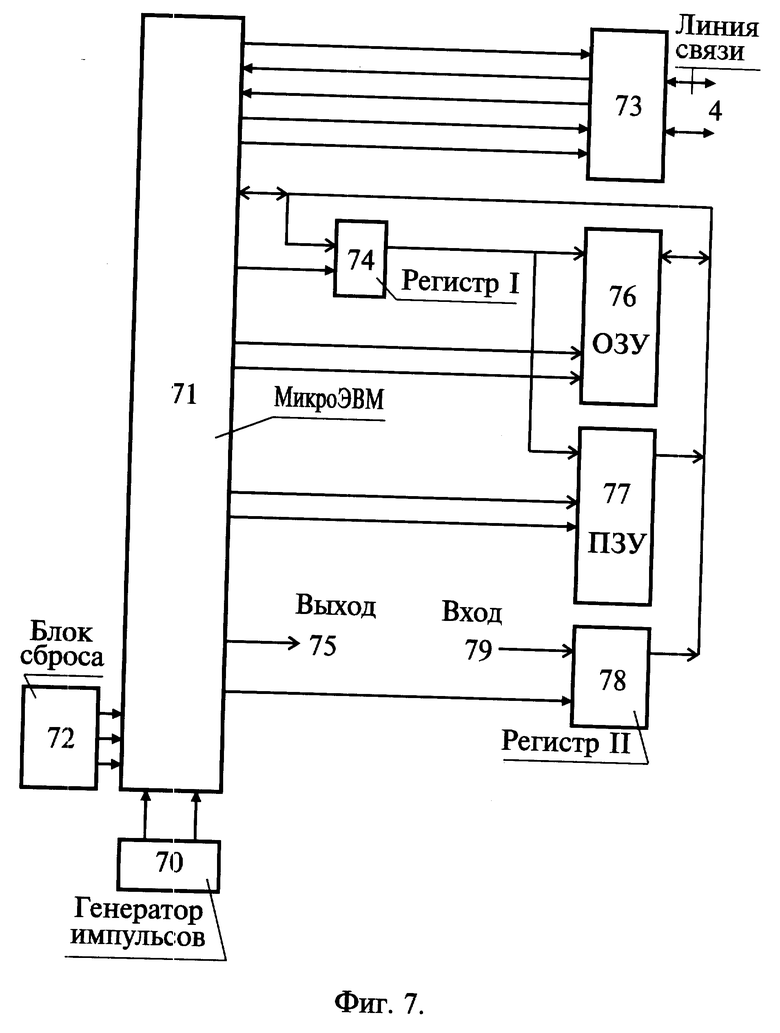
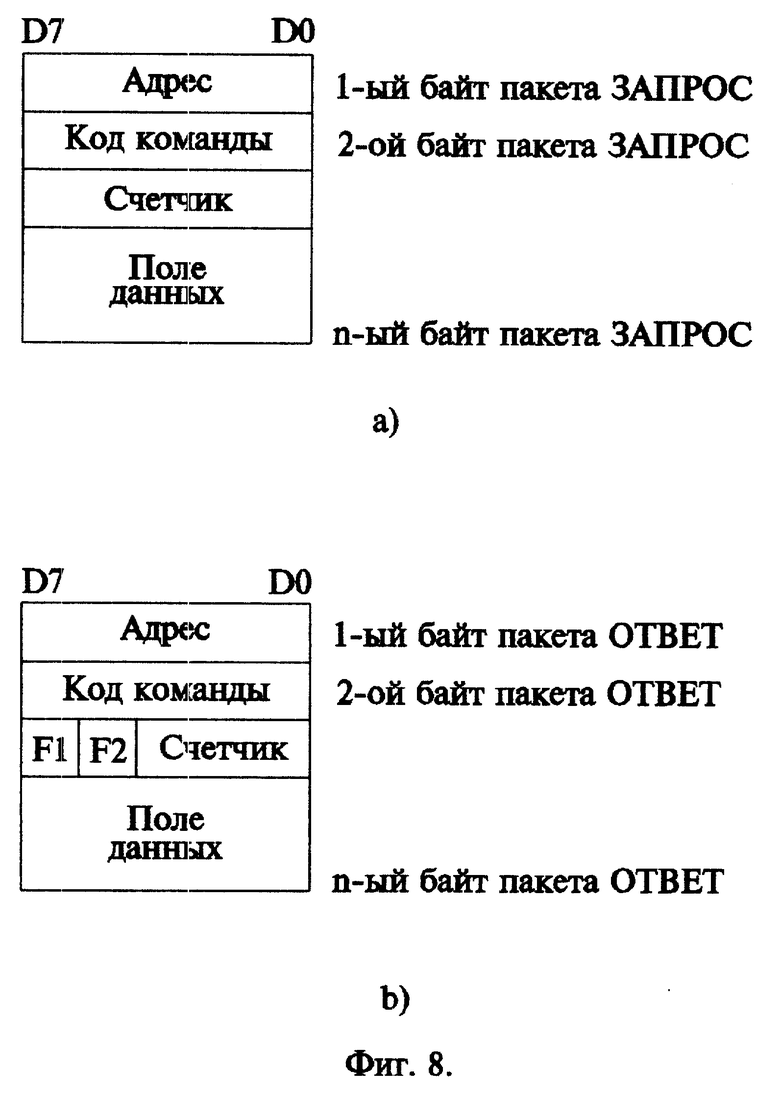
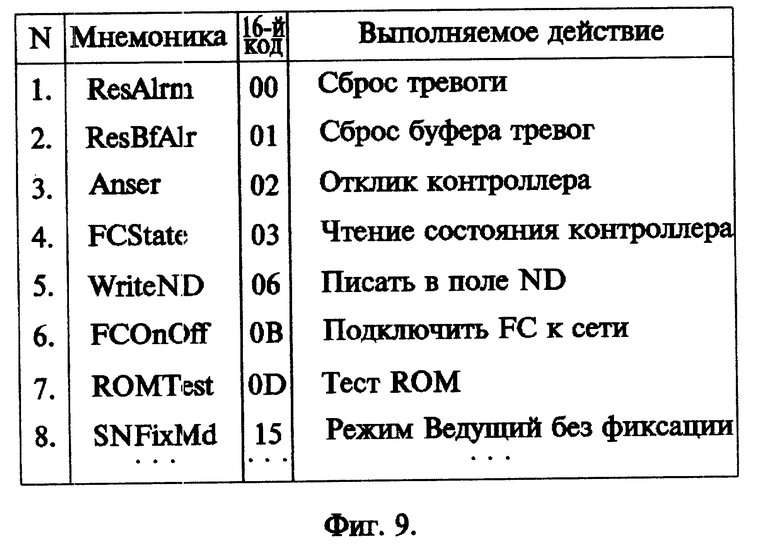
Изобретение относится к цифровым системам связи, в частности к локальным сетям передачи данных, и может быть использовано для тревожной сигнализации с использованием соединительных линий для предупреждения грабежей и краж, например, в отелях, гостиницах, офисах, многоквартирных домах и т.п., а также в госпиталях и больницах в палатах для тяжелобольных, в домах для престарелых и т. п. Техническим результатом изобретения является повышение скорости реагирования на несанкционированное проникновение в охраняемую зону, повышение надежности системы обеспечено распределенным съемом и обработкой информации и упрощенной схемотехникой за счет переноса реализации большинства функций на программный уровень и применение посылки команд при сбоях в системе. Кроме того, система позволяет осуществлять охраны объектов с большим количеством помещений, таких как гостиница, отель и т.п., полностью контролировать состояние охраняемых помещений, способствовать эффективной работе группы захвата по предотвращению несанкционированного доступа и по раскрытию совершенной кражи, нахождение и устранение неисправностей в течение 10-15 мин за счет индикации адресов сбойнувших или вышедших из строя контроллеров и/или узлов. Технический результат достигается тем, что в систему тревожной сигнализации, содержащую ведущий контроллер, линию связи и соединенные между собой И групп датчиков по B/И/ датчиков в каждой, каждая из которых через одноименный блок сопряжения подключена к одноименному ведомому контроллеру датчиков, каждый из которых и ведущий контроллер подключены к линии связи, в систему введены устройство управления, предназначенное для перевода системы из одного режима в другой, главный ведомый контроллер, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров, и вспомогательные ведомые контроллеры, причем устройство управления, предназначенное для перевода системы из одного режима в другой, соединено с ведущим контроллером, главный ведомый контроллер, предназначенный для ввода информации о движении всех ключей от номеров и о состоянии номеров, соединен с ведомыми контроллерами датчиков, вспомогательными ведомыми контроллерами и ведущим контроллером посредством линии связи. 6 з. п. ф-лы, 9 ил., 23 табл.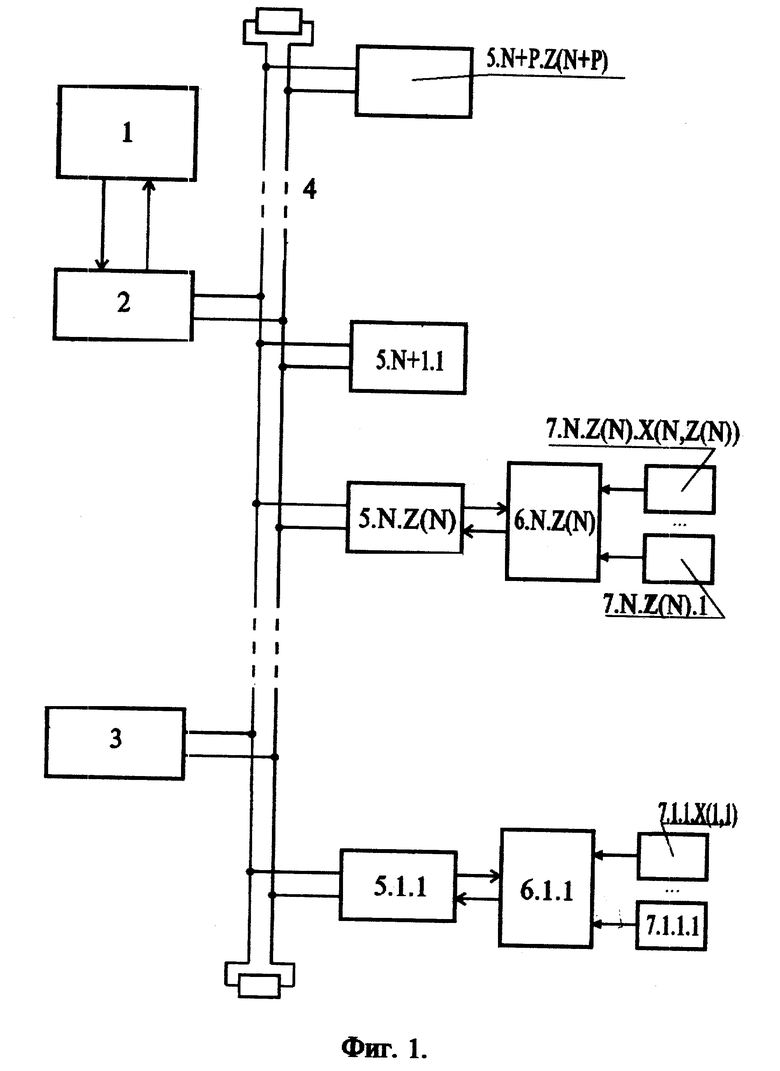
| WO, заявка, 87/03406, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| US, патент, 4660023, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| US, патент, 4742335, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

