Изобретение относится к сигнальной ленте, развернутой в длину, с множеством сигнальных сегментов по длине ленты и к системе с такой сигнальной лентой для определения состояния движения движущегося тела.
Для большинства движущихся тел, как например: транспортные средства в области автоматизации, техники подачи или в виде подъемников и т.п., в целях гарантированного эффективного рабочего процесса, а также для обеспечения безопасности рабочего персонала определение и контроль скорости движущегося тела имеют решающее значение.
У движущихся тел в форме лифтовых кабин в течение десятков лет зарекомендовала себя механическая предохранительная система, при которой в дополнение к обычным несущим тросам к движущимся деталям, например к кабине, крепится добавочный трос через один или несколько направляющих роликов.
Такая предохранительная система в форме центробежного ограничителя описана, к примеру, в патенте DE 29912544 U1. При определенной установленной повышенной скорости кабины, к примеру на 20% выше нормы, на направляющем ролике срабатывает центробежное регулирующее приспособление или подобное устройство, стопорящее направляющий ролик, в результате чего включается шахтный парашют.
Подобного типа одноступенчатый механический ограничитель скорости все же не нов. Он известен с начала производства подъемников и имеет ряд недостатков. Эти недостатки заключаются в поддержании состояния готовности другого направляющего ролика (n) и дополнительного троса, что вызывает увеличение рабочего объема всей установки и в целом приводит к увеличению нагрузок на конструкцию подъемника. Эта известная система вследствие ведомого предохранительного троса и вращающегося направляющего ролика приводит к значительному шуму и пригодна только для ограниченных скоростей кабины. Наконец, такая система требует больших затрат на техобслуживание; в аварийном случае она срабатывает несколько замедленно, а в случае загрязнения и старения, а также при недостаточном техобслуживании функционирует неудовлетворительно и во многих случаях применения имеет визуальные помехи.
В патенте WO 00/37348 описаны другие предохранительные системы для подъемников, у которых вместо отдельного предохранительного троса, протаскиваемого вслед за кабиной, предусмотрены магнитные предохранительные или тормозные устройства. Однако и такие системы имеют недостаток, состоящий в том, что в основу предохранительного устройства кабины заложен только магнитный принцип. Этим самым в случае выбора этого физического принципа использование иного предохранительного устройства движущейся кабины не гарантировано.
Кроме предохранительных систем для лифтов и прочих подъемников в патенте DE 2031186101 описано устройство для определения места положения и/или длины хода кабины с опорным узлом, с абсолютной магнитной кодировкой длины хода и измерительным элементом во взаимодействии с опорным узлом. Измерительный элемент движется относительно опорного узла и имеет магнитный датчик, при этом последний соединен с электронным прибором обработки данных. Удлиненный опорный узел одноканальным соединением снабжен элементом кодировки длины, при этом вдоль кодирующего элемента предусматривается множество кодирующих сегментов с упорядоченным полюсным шагом. Определение места положения и/или длины хода посредством измерительного элемента относительно опорного узла основывается тем самым всего лишь на определении соответствующей полярности определенных кодирующих сегментов на опорном узле с помощью измерительного элемента, перемещающегося относительно опорного узла. Иначе говоря, определение места положения и/или длины хода основывается только на принципе магнетизма опорного узла. В случае помехи в измерительном принципе, основанном на вышеуказанном свойстве, надежное определение места положения и/или длины хода движущегося тела не гарантируется.
В патенте DE 19732713 А1 описаны устройство и способ определения места положения движущегося тела, в основу которых положен принцип магнетизма. Устройство содержит измерительную головку, включающую чувствительный элемент, при этом датчик измерений относительно измерительной головки подвижен. Датчик измерений выполнен в виде продолговатого элемента из намагниченного материала. По всей длине датчика измерений предусмотрены параллельно размещенные дорожки, периодически намагничиваемые в соответствии с полюсным шагом и в упорядоченном интервале по всей длине датчика. Таким образом, и это устройство имеет недостаток, заключающийся в том, что определение места положения измерительной головки относительно датчика измерений основывается только на принципе магнетизма.
В соответствии с этим в основу изобретения поставлена задача создания такого сигнального устройства ленточного типа и системы определения места положения и состояния движения движущегося тела, при которых конструктивно простыми средствами обеспечивалась бы более высокая эксплуатационная надежность.
Задача, поставленная в основу изобретения, решается созданием сигнального устройства ленточного типа с признаками п.1 формулы изобретения, системы определения состояния движения движущегося тела с признаками п.19 формулы изобретения и устройства ограничения скорости движущегося тела с признаками п.29 формулы изобретения. Преимущественные модификации изобретения являются предметом соответствующих пунктов формулы изобретения.
Сигнальная лента согласно изобретению имеет по всей своей длине сигнальные сегменты, причем эти сигнальные сегменты, следующие поочередно друг за другом по меньшей мере через один сегмент, содержат минимум две различные информации, основывающиеся соответственно на физическом эффекте и определяемые по меньшей мере одним датчиком. Соответствующие сигнальные сегменты могут также содержать по меньшей мере три различные информации, основывающиеся соответственно на определенном физическом эффекте сигнального сегмента. Несмотря на неопределенное количество информации в соответствующем сигнальном сегменте эти информации считываются определенным датчиком, который может состоять по меньшей мере из одного измерительного элемента для определения одной информации из нескольких на этой сигнальной ленте и одного устройства для обработки данных, при этом принцип измерений измерительного элемента согласуется с соответствующим физическим эффектом сигнального сегмента.
При наличии информации в соответственных следующих друг за другом сигнальных сегментах информации в чередующихся сигнальных сегментах, основывающиеся на равном физическом эффекте, будут соответственно отличаться друг от друга.
В преимущественной модификации изобретения информации в соответственных следующих друг за другом сигнальных сегментах через один сигнальный сегмент, основывающиеся на одинаковом эффекте, совпадают. Иначе говоря, информации в каждом втором сигнальном сегменте соответственно идентичны. При этом целесообразно, чтобы либо все сигнальные сегменты, либо сигнальные сегменты с соответствующим согласованным физическим эффектом имели по существу равную ширину по всей протяженности сигнальной ленты. Благодаря этому достигается равномерное распределение информации на сигнальной ленте при равномерной чередующейся очередности. Альтернативой этому может стать, если сигнальные сегменты с различными физическими эффектами будут иметь различные размеры.
В преимущественной модификации изобретения физический эффект может основываться на излучении, посылаемом соответствующим сигнальным сегментом. Для этого сигнальный сегмент может быть оснащен транспондерной лентой, катушкой, радиопередатчиком, светодиодами и т.п., испускающими излучение. Излучение может образовывать электрическое поле, магнитное поле и/или электромагнитное поле. Посредством соответствующего датчика такое поле может быть детектировано, из чего делается заключение о соответствующих информациях сигнального сегмента.
В преимущественной модификации изобретения физический эффект может исходить из физического свойства соответствующего сигнального сегмента. Это физическое свойство может быть оптическим, магнитным свойством, свойством теплопроводности, свойством относительно отражения электромагнитных волн или другим.
В преимущественной модификации сигнальные сегменты поочередно могут визуально отличаться друг от друга. Такое отличие достигается соответствующей контрастирующей окраской сегментов, например, черный - белый и т.п. Альтернативой этому визуальное свойство соответствующего сигнального сегмента может быть создано посредством иных оптически воспринимаемых структур, например штриховка, отражаемость различных красок и т.п.
В преимущественной модификации сигнальные сегменты могут переменно иметь различную магнитную поляризацию. Некоторое количество сигнальных сегментов может иметь, к примеру, магнитную поляризацию южного направления, в то время как сигнальные сегменты, размещенные между вышеуказанными сегментами, имеют магнитную поляризацию северного направления. Такая чередующаяся поляризация достигается, к примеру, посредством отливки соответствующего металла. Альтернативой этому может стать нанесение магнитного покрытия на субстрат.
В преимущественной модификации изобретения может по меньшей мере один сигнальный сегмент из пары соседних сигнальных сегментов с поочередно различной информацией быть снабжен материалом, отражающим различным образом электромагнитные волны. Это свойство отражения может касаться, к примеру, электромагнитных волн с длиной волны ультразвукового диапазона и/или радара. Это физическое свойство относительно электромагнитных волн может быть достигнуто посредством нанесения покрытия определенным металлом, при этом должно быть обеспечено требование, чтобы такой металл во избежание помех не вызывал гетеродинирования, описанного выше магнитного действия соответствующего сигнального сегмента.
Относительно названного выше физического свойства достаточно будет, чтобы только каждый второй сигнальный сегмент покрывался слоем из упомянутого материала или же чтобы два соседних сигнальных сегмента покрывались различными материалами. Этим достигается требуемое свойство относительно отражения электромагнитных волн. Альтернативой этому возможно также покрытие чередующихся сигнальных сегментов различными металлами. Сигнальные сегменты с такими покрытиями отражают электромагнитные волны, например, в диапазоне ультразвука и/или радара по-разному. С этой целью может быть применено вслед за металлом попеременно неметаллический материал, если последний обеспечивает описанное выше действие. В дополнение к покрытию возможно также применение указанного металла в соответствующем сигнальном сегменте с широким диапазоном различных физических свойств.
В преимущественной модификации изобретения сигнальные сегменты могут поочередно показывать различную теплопроводность и/или разную температуру. В частности, при различной теплопроводности сигнальных сегментов, граничащих друг с другом, эти сигнальные сегменты соответственно могут настраиваться на разную температуру, детектируемую определенным датчиком.
Существенное преимущество сигнального ленточного устройства по данному изобретению в сравнении с обычными известными намагниченными опорными материалами заключается в том, что отдельные сигнальные сегменты сигнальной ленты содержат по меньшей мере две разные информации, основывающиеся на различных физических эффектах. Эти физические эффекты определяются с помощью соответствующих датчиков, сконструированных на основе разных физических принципов измерения. Среди множества разных датчиков принципы измерения некоторых из них диверситарно несходны и не подвержены взаимному воздействию. Выход из строя одного датчика или сбой в определении физического эффекта одного сигнального сегмента на сигнальной ленте не повлияют на остальные датчики, а также не скажутся на определении того или иного физического эффекта соответствующего сигнального сегмента сигнальной ленты. Если, к примеру, в окружении сигнальной ленты в силу возникновения пожара образуется сильное задымление, так что оптический датчик не в состоянии определить визуальные свойства соответственных сигнальных сегментов, то несмотря на сложившуюся ситуацию определение северной или южной поляризации и/или определение отражаемости сигнального сегмента относительно электромагнитных волн или иного физического эффекта, разумеется, кроме визуального, остаются возможными. В случае отказа измерительного принципа в силу помех внешнего порядка определение другого физического эффекта или двух других физических эффектов соответственного сигнального сегмента сигнальной ленты может быть осуществлено с помощью других датчиков. Эксплуатационная надежность системы в связи с определением местоположения движущегося тела благодаря выше названному значительно повышается.
Каждый сигнальный сегмент может иметь слои материалов, покрытые один поверх другого, при этом эти слои могут иметь различные физические свойства. Подобным образом также возможно подбирать в соответствующем сигнальном сегменте такие материалы, соприкасаемые друг с другом, которые бы создавали то или иное физическое свойство. Альтернативно этому возможно располагать в соответствующем сигнальном сегменте рядом друг с другом два материала с различными физическими свойствами и другой слой материала с иным физическим свойством поверх вышеназванных двух материалов или под ними.
В преимущественной модификации изобретения на поверхность сигнальной ленты может быть нанесен защитный слой и т.п., устойчивый против истирания, растрескивания и/или маслоотталкивающий. Такой защитный слой обеспечивает гарантию того, что при эксплуатации сигнального ленточного устройства в самом жестком рабочем режиме физический эффект и свойства сигнальной ленты, в особенности оптическое свойство и свойство отражения электромагнитных волн, по причине возможного повреждения сигнальной ленты нарушены не будут.
Описанная выше сигнальная лента предназначена для системы согласно изобретению, определяющей состояние движения движущегося тела. Далее, такая система, рассчитанная по меньшей мере на две информации от каждого сигнального сегмента сигнальной ленты, содержит по меньшей мере два датчика. Каждый датчик имеет минимум один измерительный элемент для определения одной из ряда информаций сигнальной ленты и схему расшифровки. Принцип измерения данного измерительного элемента подогнан под одно из физических свойств соответствующего сигнального сегмента, при этом принципы измерения датчиков взаимно диверситарны, несходны. При этом на движущемся теле могут быть размещены либо сигнальная лента, либо датчики так, чтобы в результате при движении тела сигнальная лента и датчики относительно друг друга были подвижны.
Далее, система содержит регулирующее устройство, при этом схема расшифровки каждого датчика, реагирующая на физический эффект сигнального сегмента, генерирует сигнал и выдает его в блок управления. Регулирующее устройство сконструировано таким образом, что на основе электрических сигналов датчиков может быть определена скорость, направление движения и/или актуальное положение тела относительно сигнальной ленты и датчиков. Датчики могут быть размещены на движущемся теле, при этом сигнальная лента размещается стационарно, например, в шахте лифта так, чтобы тело двигалось относительно сигнальной ленты, примыкая к ней. Альтернативой этому сигнальная лента также может размещаться на теле, а датчики будут размещены стационарно, к примеру, в шахте лифта или подобно этому, при этом тело в этом случае будет подвижным относительно датчиков, примыкая к ним.
Система, согласованная с сигнальной лентой, у которой каждый сигнальный сегмент содержит три информации, согласно преимущественной модификации изобретения может иметь дополнительный датчик. Этот дополнительный датчик таким же образом содержит минимум один измерительный элемент для определения одной из ряда информаций сигнальной ленты и схему расшифровки, при этом принцип измерения измерительного элемента этого дополнительного датчика подогнан под одно из физических свойств сигнального сегмента, и принципы измерения отдельных датчиков диверситарно несходны. Дополнительный датчик, реагирующий на соответствующее свойство сигнального сегмента, производит электрический сигнал и передает его в блок управления системы. Такая система тем самым имеет всего три датчика, которые относительно своего принципа измерения целесообразным образом согласованны с соответствующим физическим свойством сигнальной ленты. Эта система имеет то преимущество, что она дает возможность определения движения тела относительно сигнальной ленты и датчиков на основании трех различных физических принципов измерения, благодаря чему обеспечивается высокая эксплуатационная надежность системы.
Независимо от количества датчиков дальнейшее существенное преимущество изобретения состоит в том, что определение физических эффектов или свойств сигнальной ленты может происходить без соприкосновений, вследствие чего обеспечиваются минимальный износ сигнальной ленты и, соответственно, высокий срок эксплуатации.
В преимущественной модификации изобретения электрический сигнал, произведенный схемой расшифровки соответствующего датчика, может иметь прямоугольную форму. Схема расшифровки при этом программируется так, что частота выданного электрического сигнала прямо пропорциональна скорости движущегося тела. Альтернативно этому частота выданного электрического сигнала может быть также обратно пропорциональной скорости движущегося тела. Далее, датчики сконструированы таким образом, что в случае нарушений в рабочем режиме относительно сигнальной ленты схема расшифровки, относящаяся к датчикам, выдает частоту сигнала помехи. Неправильный рабочий режим может возникнуть, к примеру, в результате отсутствия сигнальной ленты, при котором не производится определение соответствующего физического эффекта, в результате загрязнения сигнальной ленты, которое особенно негативно сказывается на оптических свойствах, в результате неверного кода сигнальной ленты в результате пониженного напряжения или перенапряжения датчика, вследствие чрезмерно высокой скорости движущегося тела и т.п. Таким образом, благодаря системе согласно изобретению возможным становится не только определение местоположения и скорости движения тела относительно сигнальной ленты или датчиков, но и определение недопустимо больших отклонений датчика от сигнальной ленты. Вследствие этого могут быть предприняты соответствующие меры безопасности, как например, останов тела непосредственно при поступлении электрического сигнала с частотой помехи или альтернативно в заранее заданном положении.
В преимущественной модификации изобретения система может иметь не более одного датчика, основывающегося на оптическом принципе измерения. В случае использования более трех датчиков целесообразно также предусматривать больше одного оптического датчика. Определение соответствующего оптического свойства сигнальной ленты на основе оптического принципа измерения имеет из-за чувствительности к ограничению видимости в форме пара, задымления и т.п. то преимущество, что благодаря такому свойству возникновение пожара в окружении движущегося тела без проблем определяется сразу. Что касается определения возникновения пожара и т.п., будет достаточно иметь не более одного датчика, работающего на оптическом принципе. С целью более широкого применения датчиков могут использоваться дополнительные датчики, а именно устройства в качестве магнитного датчика и датчика для регистрации отражения электромагнитных волн.
В преимущественной модификации изобретения используется многоканальное регулирующее устройство, при этом датчики выдают минимум один электрический сигнал, который подается в регулирующее устройство. Во избежание помех в работе для соблюдения норм безопасности, предписанных для эксплуатации многих установок, в частности лифтовых и т.п., отдельные каналы блока управления относительно технического обеспечения и/или относительно их программного обеспечения могут быть диверситарно несходными. Иначе говоря, у отдельных каналов, к примеру, используются различные процессоры, благодаря чему вероятность одновременного отказа различных процессоров значительно снижается. Надежность измерения местоположения и/или скорости движущегося тела повышается также благодаря тому, что отдельные каналы относительно друг друга подвергаются корректировке.
Посредством системы согласно изобретению, содержащей сигнальную ленту с тремя различными информациями в каждом сигнальном сегменте и в соответствии с этим три датчика с различными принципами измерения, обеспечивается надежное в эксплуатации измерение местоположения и/или скорости движущегося тела, если каждый датчик посылает минимум один выходной сигнал в каждый канал регулирующего устройства. Такой аспект надежности системы достаточен, исходя из принципа «выбора 2 из 3», по которому каждый датчик из трех направляет два выходных сигнала в соответствующие каналы регулирующего устройства. Электрические сигналы датчика основываются либо на одинаковом физическом принципе измерения для всех датчиков, либо альтернативно на двух различных физических принципах измерения. В последнем случае каждый датчик содержит минимум один измерительный элемент, основанный на оптическом принципе, чем придается большое значение определению пожаров или задымления, индицируемых с помощью именно этого принципа измерения.
Согласно изобретению предусматривается также устройство ограничения скорости движущегося тела. Такое устройство содержит сигнальную ленту и систему, описанные выше. Названное устройство имеет также тормозное устройство и/или улавливатель, воздействующие на движущееся тело, причем блок управления имеет электрическое соединение с тормозным устройством и улавливателем и сконструирован таким образом, что при определении скорости тела, превышающей первое заданное пороговое значение, выдается первый электрический сигнал управления, вследствие чего активируется тормозное устройство, воздействующее на тело. Затем от блока управления при определении скорости тела, превышающей второе заданное пороговое значение, выдается второй электрический сигнал управления, вследствие чего активируется улавливатель, воздействующий на движущееся тело и приводящий его непосредственно в состояние покоя. Такое устройство ограничения скорости движущегося тела выгодно использовать при эксплуатации лифтов для обеспечения контроля за скоростью кабины и при необходимости ограничения скорости. По сравнению с вышеназванной обычной механической системой безопасности для лифтов устройство согласно изобретению, используемое при эксплуатации лифтов, имеет большое преимущество. С этим устройством не требуется много места для его установки, так как не требуется установочное пространство ни сверху лифта, ни на полу шахты; монтаж, к примеру, сигнальной ленты и датчиков прост и занимает немного времени, кроме этого, обеспечен низкий шумовой уровень вследствие бесконтактного считывания импульсов с сигнальной ленты.
Для выполнения критериев безопасности лифтов и прочих подъемников согласно руководству по эксплуатации этих механизмов устройство по данному изобретению в преимущественной модификации может иметь по меньшей мере одно защитное реле, включаемое между регулирующим устройством и тормозным устройством или улавливателем, при этом электрические сигналы от регулирующего устройства подаются на защитное реле. Для увеличении уровня защиты защитное релейное устройство может быть сдвоенным: первое и второе реле срабатывают через собственную цепь тока. Первый сигнал от регулирующего устройства посылается к первому защитному реле, второй сигнал - ко второму реле. Если в результате помехи при движении тела, например, вследствие превышения его скорости или в результате отсутствия сигнала от датчика с регулирующего устройства выдается первый электрический сигнал или второй электрический сигнал на соответствующее защитное реле, чтобы, как это требуется, притормозить тело или вообще остановить его, то дальнейшая эксплуатация тела становится возможной только тогда, когда от соответствующего защитного реле в соответствующий канал регулирующего устройства будет послан обратный сигнал. Такой обратный сигнал будет сгенерирован, к примеру, только в том случае, если обслуживающий персонал устранит установленную помеху и включит соответствующее защитное реле - в случае моностабильного реле - в рабочее положение.
В преимущественной модификации изобретения вышеназванный улавливатель может быть соединен с активатором, управляемым через второй электрический сигнал управления. При поступлении второго электрического сигнала управления на активатор включается улавливатель, вследствие чего движущееся тело или кабина лифта останавливается. Улавливатель может состоять из обычного известного заклинивающего устройства, которое останавливает движущееся тело, в частности лифтовую кабину, обычным образом. Подобный улавливатель в лифтовой сфере известен с давних пор, поэтому здесь на нем подробно останавливаться не будем.
В случае нескольких улавливателей предусматривается несколько активаторов, а именно: на каждый улавливатель по активатору. На лифтовой установке могут при необходимости использоваться два активатора для движения кабины вниз и два активатора для движения ее вверх. Это делается для придания улавливателю большего остановочного усилия.
В преимущественной модификации изобретения сигнальная лента может содержать в каждом сигнальном сегменте по три информации. Подстраиваясь под такую сигнальную ленту, используют соответственно три датчика, которые для определения физических свойств сигнальной ленты сконструированы с разными принципами измерения. К движущемуся телу крепится либо сигнальная лента, либо датчик. Регулирующее устройство выполнено таким образом, что в случае ошибочного сигнала только от одного датчика или же в случае подачи электрического сигнала с частотой помехи только от одного датчика тело будет остановлено не сразу, а в заранее запрограммированном положении. При этом регулирующее устройство выдает соответствующий электрический сигнал для останова движущегося тела. Возможна также подача дополнительного электрического сигнала в блок управления для приведения тела в состояние покоя.
При эксплуатации устройства согласно изобретению в лифтовой установке имеются три ступени защиты кабины. С первой ступенью защиты при отказе одного датчика, то есть при поступлении одного электрического сигнала с частотой помехи, продвижение кабины до следующей позиции или следующего этажа продолжается и там затем кабина останавливается для проверки рабочего состояния лифта техперсоналом. На основе «защитного резерва» еще двух датчиков отказ только одного датчика не приводит к немедленному аварийному останову, в результате чего случаев травматизма или раздражения у пассажиров в кабине не возникает.
Со второй ступенью защиты в устройстве согласно изобретению регулирующим устройством генерируется первый электрический сигнал для активирования тормозного устройства, когда на основе электрических сигналов от одного датчика или еще лучше от двух датчиков определяется скорость, несколько превышающая заданную скорость кабины. Произведенным электрическим сигналом управления, как пояснялось ранее, цепь тока защитного реле прерывается, в результате чего активируется тормозное устройство, воздействующее на кабину снижением ее скорости. Воздействие тормозного устройства на процесс движения кабины может быть так отрегулировано, что изменение ее скорости происходит плавно.
С третьей ступенью защиты устройства согласно изобретению регулирующим устройством генерируется второй электрический сигнал управления, активирующий улавливатель, когда на основе электрических сигналов от одного датчика или еще лучше от двух датчиков определяется скорость, превышающая заданную скорость кабины в значительной мере, например на 20%. Второй электрический сигнал управления инициирует активатор и тем самым улавливатель, вследствие чего кабина останавливается. Срабатывание улавливателя происходит исключительно в аварийном случае, при котором кабина находится в свободном падении, например в случае разрыва троса, или когда по другим причинам движение кабины вниз или вверх происходит с превышением установленной скорости.
Согласно следующему аспекту защиты устройства тело или кабина независимо от определенной скорости останавливается тогда, когда от двух датчиков выдается в регулирующее устройство электрический сигнал с частотой помехи.
Как пояснено ранее, в устройстве согласно изобретению общий аспект защиты заключается в том, что первый электрический сигнал управления и второй электрический сигнал активирования тормозного устройства или улавливателя поступают в разобщенные друг от друга реле защиты, активируемые раздельными цепями тока. В случае нарушения в цепи тока одного реле защиты срабатывает второе реле защиты.
В преимущественной модификации изобретения электрический сигнал с частотой помехи от одного из датчиков в регулирующем устройстве может вызвать следующий электрический сигнал, поступающий в блок управления, регулирующий движение тела. Это может быть центральный блок управления лифтом, соединенный раздельно с первым и со вторыми защитными реле. При поступлении этого последующего электрического сигнала в центральный блок управления последний в согласовании с другими информациями, содержащимися в нем, относительно скорости и/или местонахождения кабины может сгенерировать следующий сигнал для размыкания цепи тока первого защитного реле, чтобы притормозить кабину или остановить ее в заранее установленной позиции. Альтернативно или дополнительно центральный блок управления может выдать так называемый сервисный сигнал, по которому обслуживающий персонал будет проинформирован о ненормальном состоянии в эксплуатации лифта.
В преимущественной модификации изобретения сигнальная лента может быть размещена на направляющей движущегося тела. Для эксплуатации лифта сигнальную ленту целесообразно закреплять магнитным способом к направляющей, никаких других способов не требуется.
Если сигнальная лента со своими сигнальными сегментами оснащена абсолютным кодированием, то система согласно изобретению обеспечивает не только определение скорости и направления движения движущегося тела, но и абсолютное местоположение тела относительно сигнальной ленты или датчиков. При эксплуатации такой сигнальной ленты для лифтов положение кабины может быть смоделировано, что позволяет, в частности, эксплуатировать несколько кабин по одной направляющей или рельсу, исключая при этом столкновение кабин.
Другие преимущества и исключения изобретения приводятся ниже в описании и прилагаемых чертежах.
Разумеется, названные выше и поясняемые ниже признаки не выходят из рамок данного изобретения и могут осуществляться не только в приведенной комбинации, но и в других комбинациях или же совершенно отдельно.
На примере исполнения согласно чертежам изобретение проиллюстрировано схематически и в дальнейшем описывается со ссылкой на чертежи.
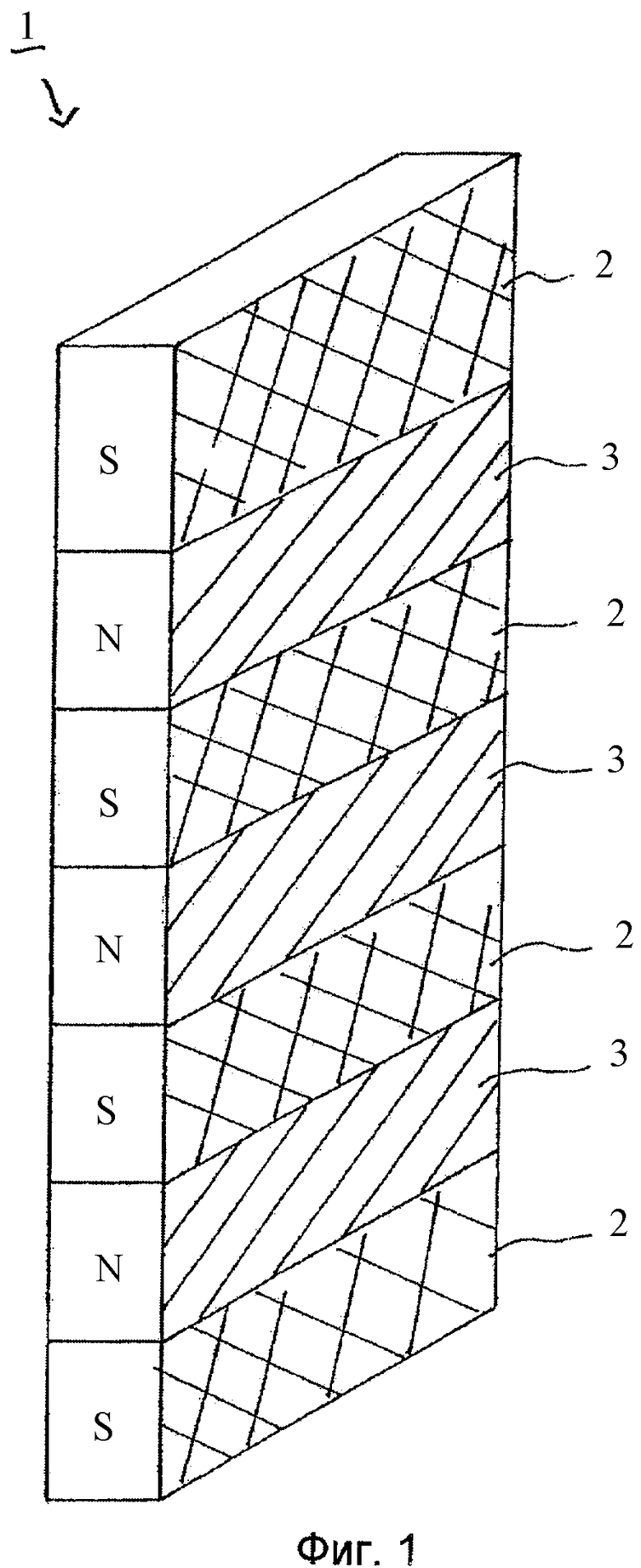
На фиг.1 показан перспективный местный вид сигнальной ленты согласно изобретению.
На фиг.2 показана сигнальная лента фиг.1 для эксплуатации лифтов.
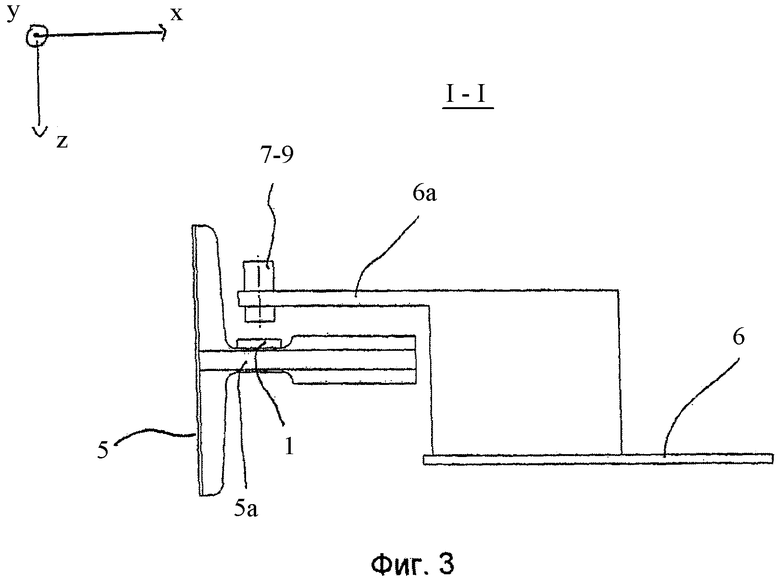
Фиг.3 - вид в сечении вдоль линии I-I фиг.2.
На фиг.4 показана структурная диаграмма функционирования устройства согласно изобретению для ограничения скорости движущегося тела; устройство предусматривается для эксплуатации лифтов по фиг.2.
На фиг.1 показана сигнальная лента 1 согласно изобретению с перспективным местным видом. Сигнальная лента 1 по всей своей длине имеет сигнальные сегменты 2, 3. Чередующиеся сигнальные сегменты 2, 3 содержат по три разных информации, основывающихся на свойствах сигнальной ленты, а именно оптическое свойство, магнитное свойство и свойство отражаемости электромагнитных волн. В частности, сигнальные сегменты сконструированы таким образом, что информации, основывающиеся на одном и том же свойстве, в чередующихся сигнальных сегментах отличаются друг от друга, чему будет пояснение ниже.
В исполнении, как показано на фиг.1, все сигнальные сегменты 2, следующие через один сегмент, имеют южную магнитную поляризацию, что обозначено буквой «S». Далее, сигнальные сегменты 2 покрыты слоем меди, что заштриховано в клетку. Благодаря медному покрытию сигнальные сегменты 2 приобретают определенное свойство относительно отражения электромагнитных волн, например ультразвуковых волн. Наконец, сигнальные сегменты 2 покрашены в белый цвет, благодаря чему они приобретают определенное оптическое свойство. В дополнение к меди в качестве покрытия может применяться для сигнальной ленты другой металл, если это не касается названного магнитного свойства.
В дополнение или для замены покрытия сигнальных сегментов 2 можно таким же образом размещать металл с определенным свойством относительно отражения электромагнитных волн рядом с участками сигнальных сегментов с иным физическим свойством.
Сигнальные сегменты 3, размещенные между сигнальными сегментами 2, имеют магнитную северную поляризацию «N». В отличие от сигнальных сегментов 2 сигнальные сегменты 3 не покрыты медью и в отношении отражаемости ультразвуковых волн и т.п. отличаются от сигнальных сегментов 2. Наконец, сигнальные сегменты 3 покрыты черной краской, в результате чего они приобретают оптическое свойство, но совсем иное, чем сигнальные сегменты 2.
Поясненные выше различные информации сигнальной ленты 1, основанные на определенных физических свойствах, определяются с помощью соответствующих датчиков. Такие датчики содержат измерительный элемент, принцип измерения которого согласован с определенным физическим свойством соответствующего сигнального сегмента сигнальной ленты, и схему расшифровки, которая преобразует определенную информацию в соответствующий электрический сигнал.
В дополнение к исполнению, проиллюстрированному на фиг.1, есть также возможность, чтобы отдельные сигнальные сегменты испускали излучение, благодаря которому возникают различные физические эффекты. Излучение может создавать электрическое, магнитное и/или электромагнитное поле. Для этого на сигнальных сегментах могут размещаться соответствующие технические средства, которые передают это излучение, как например транспондерная лента, катушка, радио или радиопередатчик. Поле, сгенерированное вокруг сигнального сегмента, обнаруживается соответственно настроенным датчиком.
Сигнальная лента 1 согласно изобретению отлично подходит для определения местоположения и скорости тела, движущегося относительно сигнальной ленты 1. Ниже под движущимся телом понимается кабина лифта, хотя целевое назначение изобретения не ограничивается только лифтом. Настроенные на три различные информации сигнального сегмента у кабины лифта размещаются соответственно три датчика, в основе которых в согласовании с различными физическими свойствами сигнальной ленты заложены различные принципы измерения. Иначе говоря, принципы измерения отдельных датчиков диверситарно несходны.
В процессе эксплуатации лифта, то есть когда кабина лифта с закрепленными на ней датчиками движется относительно сигнальной ленты 1, каждый датчик определяет информацию соответствующего сигнального сегмента 2, 3 сигнальной ленты 1, а также смену этих информаций. Смена информации обрабатывается соответствующей схемой расшифровки датчиков, выдающих прямоугольный сигнал с характерной частотой, зависящей от скорости. Схемы расшифровки при этом так спрограммированы, что частота произведенного электрического сигнала с возрастанием скорости кабины относительно сигнальной ленты 1 убывает. Частота прямоугольного сигнала на выходе может быть рассчитана, к примеру, по следующей формуле:
где
f - скорость на выходе в Гц,
Zoi - характерное значение для каждого датчика,
Vakt - актуальная скорость датчика или кабины относительно сигнальной ленты в м/с,
k - пропорциональный коэффициент в согласовании с лифтовой установкой.
С выбором для каждого датчика определенного характерного значения Zoi частота выходного сигнала соответствующего датчика будет находиться в определенном диапазоне, по которому можно делать заключение о датчике.
Из выше названного уравнения выходная частота прямоугольного сигнала обратно пропорциональна актуальной скорости кабины.
Альтернативно выходная частота прямоугольного сигнала может определяться как прямо пропорциональная к актуальной скорости кабины, а именно по уравнению:
f=k(Zoi+Vakt) [Гц]
Названные здесь значения соответствуют значениям упомянутого выше уравнения с обратной пропорциональностью.
На фиг.2 показана, в принципе, сильно упрощенная лифтовая установка 4, на которой используется сигнальная лента 1. Сигнальная лента 1 закрепляется вертикально вдоль направляющего рельса 5 лифта. Сигнальную ленту 1 рекомендуется закреплять к направляющему рельсу 5 магнитным способом, никакие дополнительные крепежные средства для крепления сигнальной ленты 1 не требуются. На кабине 6 с помощью консоли 6а крепятся три датчика 7, 8, 9, при этом консоль 6а исполняется с такими размерами, чтобы датчики 7, 8, 9 при движении кабины 6 могли находиться в положении против сигнальной ленты 1.
Фиг.3 демонстрирует направляющий рельс 5 и часть кабины 6 в разрезе по линии I-I фиг.2. Направляющий рельс 5 выполнен в форме тавровой балки. Сигнальная лента 1 крепится магнитным способом к поверхности средника 5а тавровой балки.
Датчики 7-9, размещенные на консоли 6а, находятся в положении против сигнальной ленты 1, закрепленной к тавровой балке 5. При эксплуатации лифта, то есть во время движения кабины в направлении У фиг.2 и фиг.3 датчики 7-9 находятся в положении против сигнальной ленты 1, так что информации с сигнальной ленты 1 могут без проблем быть определены датчиками 7-9.
Датчики 7-9 сконструированы, как это пояснено выше, на основе различных принципов измерения, а именно согласуясь с определенным физическим свойством сигнальной ленты 1. В частности, первый датчик 7 имеет исполнение магнитного чувствительного элемента, посредством которого определяется соответствующая магнитная поляризация сигнальной ленты (например, посредством эффекта Холла, GMR, AMR и т.д.). Второй датчик 8 имеет исполнение чувствительного элемента, с помощью которого определяется свойство сигнальной ленты 1 относительно отражения электромагнитных волн. К тому же второй датчик 8 имеет чувствительный элемент, который посылает электромагнитные волны в направлении сигнальной ленты 1, например в форме ультразвуковых волн. Соответственно, второй датчик 8 имеет также элемент, принимающий электромагнитные волны, отраженные от сигнальной ленты 1, и эту информацию направляет дальше в соответствующую схему расшифровки второго датчика 8. На основе электромагнитных волн, принятых элементом-приемником, схема расшифровки второго датчика 8 генерирует соответствующий электрический сигнал. Наконец, третий датчик 9 выполнен в форме оптического чувствительного элемента, с помощью которого определяются чисто оптические свойства сигнальной ленты 1. В данном случае третий датчик 9 реагирует на контрастные цвета сигнальной ленты 1, так что черный и белый цвет покрытия соответствующих сигнальных сегментов 2, 3 сигнальной ленты 1 определяются третьим датчиком 9. Иначе говоря, физические принципы активности и схемы расшифровки датчиков различны. Итак, если и возникает какая-либо помеха, вызванная извне, то ее воздействие преимущественным образом сказывается только на одном датчике.
Электрические сигналы, производимые схемами расшифровки трех датчиков 7-9, поступают в регулирующее устройство, выполненное таким образом, что на основе отдельных электрических сигналов трех датчиков 7-9 обеспечивается определение направления движения и/или актуальная позиция кабины 6 относительно сигнальной ленты 1. Сигнальная лента 1, отдельные датчики 7-9, размещенные на кабине 6, и регулирующее устройство объединены в одну систему согласно изобретению, которая предназначена для определения состояния движения кабины 6. Регулирующее устройство можно обозначить как микроконтроллер, в последующем он так и будет называться. Ниже о нем будет дано подробное объяснение.
Отдельные конструктивные элементы системы согласно изобретению в форме датчиков 7-9 и микроконтроллера, который может быть размещен, к примеру на кабине, по своему исполнению соответствуют общим жестким требованиям эксплуатации в лифтовой шахте. Датчики и микроконтроллер имеют полную защиту от прикосновений, защиту от попадания пыли и, кроме этого, защищены от водяных брызг. Далее, названные конструктивные электрические элементы системы защищены экраном против переменных внешних магнитных полей и прочих излучений от мобильной радиоаппаратуры, радио. Корпус этих элементов имеет такую изоляцию, что, к примеру, окружающая температура от - 20°С до +85°С не сказывается на их надежной эксплуатации.
При эксплуатации кабины лифта 6 расстояние от датчиков 7-9 до сигнальной ленты 1 в силу возникающих при движении кабины колебаний, вибраций и др. не постоянно. Точность определения информаций с сигнальной ленты 1 через датчики установлена такой, что отключение датчиков по вертикали (направление Z, фиг.2 и фиг.3) и по горизонтали (направление У, фиг.2 и фиг.3) относительно сигнальной ленты может варьироваться в пределах нескольких миллиметров. До тех пор, пока такие отклонения в расстоянии между датчиками и сигнальной лентой 1 находятся в этих пределах, рабочее состояние датчиков считается в норме. Только в случае когда отклонение в расстоянии между каким-либо датчиком и сигнальной лентой 1 превысит выше названный предел, рабочее положение датчика относительно сигнальной ленты будет считаться ненормально, и такое состояние будет предупреждено датчиками электрическим сигналом с частотой помехи. Об этом ниже дается пояснение.
Рабочий диапазон трех датчиков 7-9 охватывает различный диапазон скоростей, например скорости от 0 м/сек до 23 м/сек. Этот диапазон скоростей в свою очередь может быть разбит на несколько частей, при этом каждый датчик покрывает только один рабочий диапазон скорости. Далее, вибрация датчиков в вертикальном направлении, вызывающая изменение частоты, допустима лишь в тех пределах, насколько она соответствует фактической скорости кабины 6 и датчиков относительно сигнальной ленты 1. В частности, вибрация около одной и той же боковой поверхности сигнального сегмента сигнальной ленты 1 не должна приводить к изменению частоты. Само собой разумеется, что движения датчиков в горизонтальном направлении в рабочем диапазоне, при котором обеспечивается нормальный режим эксплуатации кабины, не должны допускать изменения частоты.
При движении кабины 6 три датчика 7-9 перемещаются с определенной скоростью относительно сигнальной ленты 1. Произведенные прямоугольные сигналы основываются на смене информации сигнальной ленты в ее чередующихся сигнальных сегментах 2, 3. Частота прямоугольного сигнала на выходе, исходящего от схем расшифровки датчиков 7-9, в соответствии с приведенными выше уравнениями обратно пропорциональна или прямо пропорциональна скорости кабины 6. Согласно этому посредством системы по данному изобретению обеспечивается определение местоположения, направления движения и/или скорости кабины 6. Сигнальная лента 1 и система согласно изобретению могут кроме выше сказанного быть составной частью устройства ограничения скорости кабины 6, при этом такое устройство содержит также тормозное приспособление или улавливатель, воздействующие на кабину. При таком устройстве микроконтроллер системы соединен электропроводом с тормозным приспособлением и улавливателем. Микроконтроллер выполнен таким образом, что при определении скорости кабины 6, превысившей первое заданное пороговое значение, выдается первый электрический сигнал управления VV, в результате которого активируется тормозное устройство, действующее на тело. При определении скорости кабины 6, превысившей второе заданное пороговое значение, микроконтроллер выдает второй электрический сигнал управления VA, в результате которого активируется улавливатель, воздействующий на кабину и немедленно останавливающий ее. На структурной диаграмме фиг.4 такое устройство 30 проиллюстрировано схематически.
Устройство 30, наряду с сигнальной лентой 1 и датчиками 7-9, содержит также микроконтроллер 10, подключенное к нему защитное релейное устройство в форме первого защитного реле 11 и второго защитного реле 12, тормозное устройство (здесь не указано) и активатор 13, подключенный к первому защитному реле 12 и приводящий в действие улавливатель 14. На фиг.4 слева показаны сигнальная лента 1 и три датчика 7-9, при этом датчики 7-9 размещены на кабине и в рабочем движении кабины перемещаются по сигнальной ленте 1. Каждый из датчиков 7-9 содержит элементы измерения (здесь не указаны), соединенные соответствующей схемой расшифровки датчика. При перемещении мимо сигнальной ленты 1 каждый датчик 7-9 в соответствии с информациями сигнального сегмента 2, 3 производит электрические сигналы, которые поступают в микроконтроллер. В центральной части фиг.4 показан микроконтроллер 10, охватывающий первый канал А и второй канал В. Конструкция микроконтроллера 10 подробно пояснена ниже. Далее, может быть предусмотрен (на фиг.4 показано справа) блок управления лифтом 31, соединенный отдельно с микроконтроллером 10 и первым и вторым защитными реле 11, 12.
Первое защитное реле 11 и второе защитное реле 12 подключены соответственно к первому каналу А и второму каналу В микроконтроллера 10. Первое защитное реле 11 соединено с активатором 13, который включает и выключает улавливатель 14. Второе защитное реле 12 действует на тормозное устройство (здесь не показано) и в случае соответствующего сигнала управления может приводить тормозное устройство в действие.
Блок управления 30, показанный на структурной диаграмме фиг.4, вместо обычной механической предохранительной системы с добавочным тросом, как было описано выше, может использоваться в качестве защитного приспособления, например для ограничения и контроля скорости кабины. Блок управления 30 по сравнению с известной механической системой отличается повышенной надежностью, он бесшумно работает даже при высокой скорости кабины. Блок управления 30 легко монтируется в лифтовых установках, не вызывает проблем с наладкой и переналадкой даже в самых высоких зданиях. Так как применение в обычных случаях необходимых направляющих роликов и натяжного груза отпадает, то в голове и у подножия шахты лифта никакого установочного пространства не требуется, в результате чего производственные расходы снижаются. Микроконтроллер 10 содержит, как пояснялось выше, первый канал А и второй канал В. Каждый канал соответственно содержит три таймер-модуля 15-17, в которые поступают электрические сигналы S1-S3 от датчиков 7-9. Для увеличения эксплуатационной надежности устройства эти оба канала имеют различное техническое обеспечение, к примеру два различных процессора. В состав каждого микроконтроллера 10 может быть включено по одному элементу: RAM 21 (оперативное ЗУ), Flash-Memory 22 (ЗУ), EPROM 23 (электр. прогр. ЗУ), OSC-Watchdog 24 (сторожевая схема обеспечения безопасности), CAN-модуль и отдельные таймер-модули 15-17. Состав технического обеспечения микроконтроллера 10 соответствует стандартам электронной техники, выпускаемой промышленностью и имеющейся в продаже, поэтому состав технического обеспечения и функция вычислительного процесса подробного описания в дальнейшем не требуют.
Электрические сигналы трех датчиков 7-9 поступают в таймер-модули 15-17 соответствующих каналов А, В. В заключение производится интегрирование и считывание поступившего в таймер-модули прямоугольного сигнала, на основе чего определяется фактическая скорость кабины 6. Для дальнейшего повышения эксплуатационной надежности первый и второй каналы А и В непрерывно сравниваются друг с другом, чтобы на основании сравнения вычислительных значений первого канала А и второго канала В можно было бы заранее обнаружить разницу между электрическими сигналами датчиков 7-9, допущенную, например, вследствие ошибки.
Первое защитное реле 11 и второе защитное реле 12, исходя из аспекта надежности, активируются отдельными цепями тока. К каждому каналу микроконтроллера 10 может быть подключено множество защитных реле, которые также активируются отдельными цепями тока. Защитные реле 11, 12 соединены электропроводом с отдельными каналами А, В микроконтроллера так, что сигналы управления (об этом ниже следует пояснение) от каналов А, В могут поступать в защитные реле 11, 12 и, наоборот, от защитных реле 11, 12 обратная информация может быть послана в микроконтроллер 10.
Второе защитное реле 12, как пояснено выше, соединено с активатором 12, приводящим в действие улавливатель 14. Под улавливателем такого типа понимается известное с давних пор клиновое устройство, которое для останова кабины в аварийном случае всаживается между направляющим рельсом лифта и бортовым участком кабины. В неподвижном состоянии кабины 6 активатор можно с целью тестирования электрическим сигналом Sa активировать и деактивировать. По окончании тестирования лифт может быть приведен в нормальный режим работы.
Ниже отдельно рассматривается ограничение скорости с помощью устройства относительно принципа работы микроконтроллера.
В рабочем режиме кабины 6 на таймер-модули 15-17 первого канала А и второго канала В подаются электрические сигналы S1-S3. При этом электрический сигнал S1 обозначает сигнал первого датчика 7, S2 - электрический сигнал второго датчика 8 и, соответственно, S3 - электрический сигнал третьего датчика 9. На основе сигналов
S1-S3 в каждом канале А, В микроконтроллера определяется фактическая скорость кабины 6. Эта фактическая скорость сравнивается с заданной допустимой скоростью, на основе чего при определенных условиях генерируются дальнейшие сигналы управления для активации тормозного устройства или улавливателя 14. В случае если определенная фактическая скорость превышает установленную заданную скорость на первое запрограммированное пороговое значение, то есть незначительно, то первый канал А и/или второй канал В генерирует первый электрический сигнал управления VV, который поступает, соответственно, в первое защитное реле 11. Это приводит к размыканию цепи тока, которым активируется первое защитное реле 11, в результате чего срабатывает тормозное устройство, воздействующее на кабину 6. Переменное действие тормозного устройства на кабину приводит к тому, что слегка увеличенная скорость кабины 6 уменьшается до величины допустимой заданной скорости или что при необходимости кабина 6 притормаживается.
Если фактическая скорость кабины 6, определенная микроконтроллером 10, превысит допустимую заданную скорость и второе запрограммированное пороговое значение, то есть на значительную величину, то первым каналом А и/или вторым каналом В генерируется второй электрический сигнал управления VA и посылается, соответственно, во второе защитное реле 12. Вследствие взаимодействия между вторым защитным реле 12 и активатором 13 последний срабатывает и приводит в действие улавливатель 14. Второй электрический сигнал управления VА генерируется при аварийном случае, когда, как уже было описано выше, определенная скорость кабины 6 слишком высока, в результате чего кабина 6 под воздействием улавливателя 14 мгновенно останавливается.
Сигналы датчиков на выходе в форме прямоугольных сигналов (фиг.4, слева изображение символикой), поступающие в таймер-элементы 15-17 микроконтроллера 10, являются пульсовыми волнами (соответственно выше приведенному уравнению для обратной пропорциональности) с самой высокой частотой при скорости 0 и наименьшей сенсорно-удельной частотой при скорости (превышение первого или второго порогового значения) и сенсорно-удельной наивысшей частотой при малой скорости кабины. Как выше было описано, в случае ненормального функционирования, к примеру при отсутствии сигнальной ленты 1, датчики выдают электрический сигнал с частотой помехи, после которого может быть выдан второй электрический сигнал управления VA.
После срабатывания тормозного устройства первым сигналом управления VV или улавливателя 14 вторым электрическим сигналом управления VA дальнейшее функционирование устройства согласно изобретению возможно только после того, как техническим персоналом будет проверено рабочее состояние лифтовой установки. После произведенной проверки посылается соответствующий разрешающий сигнал SR, 11 и SR, 12 от соответствующих защитных реле 11 и 12 обратно в кабины А, В, и нормальный рабочий процесс лифта может быть продолжен.
Устройство согласно изобретению с контролем скорости кабины включает три ступени защиты. Например, в случае отказа одного датчика или когда с него в микроконтроллер 10 поступает электрический сигнал с частотой помехи, то движение кабины 6 продолжается до следующего этажа, и там, на этом этаже, кабина останавливается для проверки ее состояния техническим персоналом. Согласно второй ступени защиты при незначительном увеличении скорости кабины 6 производится первый электрический сигнал управления VV, вследствие чего активируется тормозное устройство для уменьшения скорости кабины. В третьей ступени защиты при существенно увеличенной скорости кабины 6 посредством второго электрического сигнала управления VA активатором 13 приводится в действие улавливатель 14, и кабина в результате немедленно останавливается.
Математическое обеспечение преимущественным образом составлено так, что отсутствие индикации сигнальной ленты, например вследствие задымления или чрезмерного загрязнения, что влечет к соответствующему электрическому сигналу с частотой помехи, не будет означать сразу аварийную ситуацию. Нет, вместо этого при электрическом сигнале с частотой помехи от одного из трех датчиков нормальный рабочий режим кабины 6 продолжается до следующего этажа и затем на этом этаже кабина останавливается для проверки ее рабочего состояния. Выполненная таким образом ступенчатая архитектура защиты устройства согласно изобретению способствует безопасности пассажиров в лифте и исключает ненужные меры аварийного останова кабины, например в результате загрязнения сигнальной ленты.
Далее, устройство может быть выполнено таким образом, что при электрическом сигнале с частотой помехи в регулирующем устройстве 10 производится следующий электрический сигнал управления, поступающий в блок управления лифтом 31. Блок управления лифтом 31 с учетом дальнейших информаций относительно состояния движения или актуальной позиции кабины может затем принять решение, в каком положении кабину затормозить или остановить. Для этого блок управления 31 посылает соответствующий сигнал в первое или во второе реле защиты 11, 12 для размыкания их цепей тока. Дополнительно или в качестве альтернативы этому блок управления 31 может генерировать так называемый сервисный сигнал, посредством которого технический персонал ставится в известность об отказе в работе лифта.
Поясненное выше устройство с помощью сигнальной ленты 1 и взаимодействующих оптических и электрических компонентов гарантирует эффективное ограничение и контроль скорости кабины лифта. Устройство тем самым может заменить обычные механические системы безопасности для ограничения скорости лифта. Так как при использовании данного устройства отпадает надобность в применении предохранительного троса, движущегося вместе с кабиной, то возникает существенное преимущество относительно износоустойчивости и бесшумной работы лифта в сочетании с повышенной скоростью кабины в допустимых пределах. Устройство на основе изложенной выше концепции безопасности полностью отвечает всем требованиям директив относительно подъемников и согласно последнему уровню техники соответствует третьей степени защиты известной четырехступенчатой концепции безопасности. Сигнальная лента, система и устройство, описанные выше, могут подобным образом быть использованы и в других случаях применения, а именно там, где речь идет об эффективном контроле и ограничении скорости движущегося тела.

Изобретение относится к транспортным средствам в области автоматизации, например к технике подачи или к подъемникам. Сигнальная лента (1), развернутая в длину, содержит сигнальные сегменты (2, 3), каждый из которых, по меньшей мере, содержит две различные информации, связанные с оптическими, магнитными свойствами или свойствами, относящимися к отражению электромагнитных волн от сигнальных секций (2, 3), воспринимаемых по крайней мере одним датчиком (7-9). Информация, относящаяся к тем же свойствам в альтернативных сигнальных сегментах (2, 3), различна. Сигнальная лента применяется для определения состояния движения движущегося тела, в частности кабины лифта. Техническим результатом изобретения является обеспечение безопасности и контроля скорости движущегося тела. 4 н. и 37 з.п. ф-лы, 4 ил.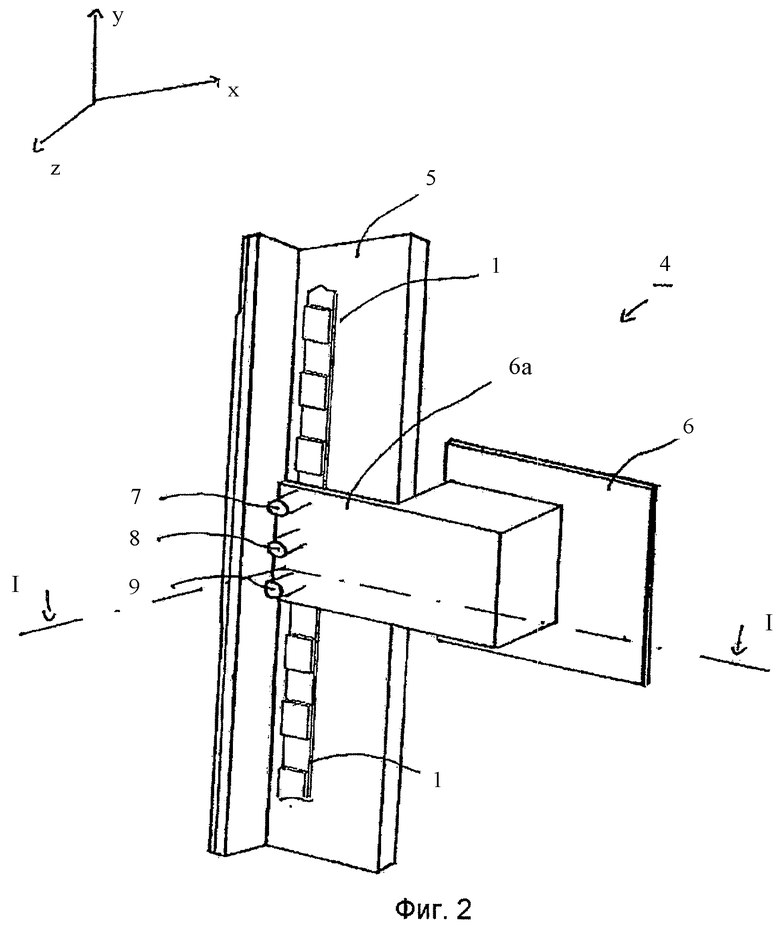
1. Сигнальная лента (1), развернутая в длину, содержащая сигнальные сегменты (2, 3) по всей своей протяженности, поочередно следующие друг за другом, причем по меньшей мере через один сегмент содержат минимум две различные информации, основывающиеся соответственно на физическом эффекте и определяемые по меньшей мере одним датчиком.
2. Сигнальная лента (1) по п.1 с сигнальными сегментами (2, 3), поочередно следующими друг за другом через один сегмент, которые содержат по меньшей мере три различные информации.
3. Сигнальная лента (1) по п.1, содержит соответствующие следующие друг за другом сигнальные сегменты (2, 3), при этом информации в чередующихся сигнальных сегментах (2, 3), основывающиеся на равном физическом эффекте, отличаются друг от друга.
4. Сигнальная лента (1) по п.1, у которой информации, основывающиеся на равном физическом эффекте, в соответствующих сигнальных сегментах, следующих друг за другом через один сегмент, совпадают.
5. Сигнальная лента (1) по п.1, у которой физический эффект основывается на излучении, посылаемом соответствующим сигнальным сегментом.
6. Сигнальная лента (1) по п.5, у которой излучение производит электрическое поле, магнитное поле и/или электромагнитное поле.
7. Сигнальная лента (1) по п.1, у которой физический эффект определяется физическим свойством соответствующего сигнального сегмента.
8. Сигнальная лента (1) по п.7, у которой физическое свойство соответствующего сигнального сегмента (2, 3) является оптическим свойством, магнитным свойством, свойством теплопроводности, свойством относительно отражения электромагнитных волн или другим.
9. Сигнальная лента (1) по п.8, у которой сигнальные сегменты (2, 3) попеременно имеют различную магнитную поляризацию.
10. Сигнальная лента (1) по п.8, у которой сигнальные сегменты (2, 3) попеременно оптически отличаются друг от друга.
11. Сигнальная лента (1) по п.8, у которой по меньшей мере один сигнальный сегмент из пары соседних сигнальных сегментов (2, 3) с поочередно различной информацией снабжен материалом, отражающим электромагнитные волны различным образом по сравнению с соседним сигнальным сегментом.
12. Сигнальная лента (1) по п.11, у которой материал отражает электромагнитные волны с длиной волн ультразвукового диапазона и/или радара по-разному.
13. Сигнальная лента (1) по п.12, у которой определенный сигнальный сегмент покрыт материалом.
14. Сигнальная лента (1) по п.8, у которой сигнальные сегменты (2, 3) показывают поочередно различную теплопроводность и/или различную температуру.
15. Сигнальная лента (1) по п.1, у которой соответствующие информации сигнальных сегментов (2, 3) определяются датчиком бесконтактно.
16. Сигнальная лента (1) по п.1, у которой отдельные сигнальные сегменты (2, 3) имеют абсолютное кодирование.
17. Сигнальная лента (1) по п.1, у которой сигнальные сегменты (2, 3) с совпадающими физическими эффектами имеют в основном одинаковую ширину на протяжении сигнальной ленты (1).
18. Сигнальная лента (1) по п.1, у которой на одной ее поверхности нанесено защитное покрытие, устойчивое против истирания, растрескивания и/или маслоотталкивающее.
19. Система для определения состояния движения движущегося тела, снабженная:
сигнальной лентой (1) по любому из пп.1-18,
по меньшей мере двумя датчиками (7, 8, 9), которые содержат минимум один измерительный элемент для определения одной из информации сигнальной ленты (1) и одну схему расшифровки, при этом принцип измерения соответствующего измерительного элемента настроен на какой-либо физический эффект сигнального сегмента (2, 3), а принципы измерения датчиков (7, 8, 9) различны относительно друг друга, при этом сигнальная лента или датчики устанавливаются на теле так, чтобы сигнальная лента и датчики относительно друг друга были подвижны,
регулирующим устройством (10), соединенным с датчиками (7, 8, 9) электропроводом, при этом схема расшифровки соответствующего датчика, реагирующая на физический эффект сигнального сегмента (2, 3), генерирует электрический сигнал и выдает его в регулирующее устройство (10), при этом регулирующее устройство (10) выполнено таким образом, что на основе электрических сигналов датчиков (7, 8, 9) определяется скорость, направление движения и/или актуальное положение тела относительно сигнальной ленты (1) или датчиков.
20. Система по п.19, у которой предусмотрен дополнительный датчик, содержащий минимум один измерительный элемент для определения одной из ряда информации сигнальной ленты (1) и схему расшифровки, при этом принцип измерения измерительного элемента дополнительного датчика адаптирован под один из физических эффектов сигнального сегмента (2, 3), и принципы измерения датчиков (7, 8, 9) несходны, причем реагируя на соответствующее физическое свойство сигнального сегмента (2, 3) дополнительный датчик выдает электрический сигнал и передает его на регулирующее устройство (10).
21. Система по п.19, у которой электрический сигнал соответствующего датчика является прямоугольным.
22. Система по п.21, у которой частота прямоугольного сигнала прямо пропорциональна или обратно пропорциональна относительной скорости между сигнальной лентой (1) и соответствующим датчиком (7, 8, 9).
23. Система по п.19, у которой датчики (7, 8, 9) при нештатном рабочем состоянии относительно сигнальной ленты (1) выдают электрический сигнал с частотой помехи.
24. Система по п.23, у которой нештатная рабочая позиция выдается заданным интервалом между минимум одним датчиком (7, 8, 9) и сигнальной лентой (1).
25. Система по п.19, у которой по крайней мере один датчик (7, 8, 9) выполнен на основе оптического измерительного принципа.
26. Система по п.19, у которой регулирующее устройство (10) имеет множество каналов (А, В), и датчики (7, 8, 9) производят минимум один электрический сигнал, который поступает в отдельные каналы регулирующего устройства (10).
27. Система по п.26, у которой отдельные каналы относительно их технического и/или программного обеспечения несходны.
28. Система по п.27, у которой отдельные каналы (А, В), подвергаясь постоянной регулировке, сбалансированы.
29. Устройство для ограничения скорости движущегося тела, снабженное:
системой по любому из пп.19-28,
тормозным устройством и/или улавливателем (14), действующим на движущееся тело, при этом регулирующее устройство (10) соединено с тормозным устройством и улавливателем (14) электропроводом и выполнено так, что при определении скорости тела, превышающей первое заданное пороговое значение, выдается первый электрический сигнал VV, которым активируется тормозное устройство, действующее на тело, и при определении скорости тела, превышающей второе заданное пороговое значение, выдается второй электрический сигнал управления VA, в результате которого активируется улавливатель (14), воздействующий на тело и приводящий его к останову.
30. Устройство по п.29, у которого между регулирующим устройством (10) и тормозным устройством или улавливателем (14) включено минимум одно защитное релейное устройство (11, 12), при этом электрические сигналы от регулирующего устройства (10) поступают на защитное релейное устройство (11, 12).
31. Устройство по п.30, у которого защитное релейное устройство составлено из минимум одного первого защитного реле (11) и одного второго защитного реле (12), при этом первый сигнал управления VV поступает в первое защитное реле (11), а второй сигнал управления VA - во второе защитное реле (12).
32. Устройство по п.31, у которого первое защитное реле (11) и второе защитное реле (12) активируются раздельными цепями.
33. Устройство по п.31 с системой по любому из пп.26-28, у которой большинство каналов соединены электрически по меньшей мере с первым защитным реле (11) и вторым защитным реле (12).
34. Устройство по п.29, дополнительно содержащее активатор (13), соединенный с улавливателем (14) и управляемым вторым сигналом управления (VA).
35. Устройство по п.29 с сигнальной лентой (1) по любому из пп.2-18 и системой по любому из пп.20-28, с применением которого движущееся тело при использовании по меньшей мере трех датчиков (7, 8, 9) и наличии электрического сигнала с частотой помехи только от одного датчика останавливается по достижении запрограммированного положения.
36. Устройство по п.35, у которого электрический сигнал с частотой помехи от одного из датчиков (7, 8, 9) в регулирующем устройстве (10) вызывает второй электрический сигнал VA.
37. Устройство по п.35, у которого электрический сигнал с частотой помехи от одного из датчиков (7, 8, 9) в регулирующем устройстве (10) генерирует следующий электрический сигнал, который поступает в блок управления (31) для управления движением движущегося тела, чтобы в запрограммированной позиции остановить названное тело и/или произвести сервисный сигнал.
38. Устройство по п.29, согласно которому тело в случае сигнала помехи от двух датчиков (7, 8, 9) останавливается посредством улавливателя (14).
39. Устройство по п.29, у которого сигнальная лента (1) закрепляется на направляющей движущегося тела.
40. Устройство по п.39, у которого сигнальная лента (1) крепится магнитным способом к направляющей движущегося тела.
41. Применение устройства по п.29 для ограничения скорости кабины лифта (6).
| DE 20311861 U1, 13.11.2003 | |||
| US 5648645 A, 15.07.1997 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛИФТА | 1996 |
|
RU2179143C2 |
| RU 96115405 A, 27.11.1998. | |||

