Область техники
Настоящее изобретение относится к грузоподъемному оборудованию, в основном к лифтам, и, в частности, к регулировке выравнивания кабины лифта на заданном уровне.
Уровень техники
Современные системы лифтов используют сложные программы в контроллерах, которые управляют большей частью функций, выполняемых лифтом. Контроллеры собирают информацию от различных источников системы лифта и используют эту информацию для эффективного управления работой лифта. Таким образом, скорость кабины лифта, разгон, останов, останов на нужном этаже, позиционирование на этаже или выравнивание и другое управляется контроллером. При выполнении этих операций основным управляющим сигналом для контроллера является скорость кабины лифта. Информация о скорости особенно необходима для обеспечения точной остановки на различных площадках в здании.
Лифтовые системы обычно используют датчик контроля вала электродвигателя, который приводит в движение ведущий шкив лифта. Датчик - это кодер, который измеряет движение вала двигателя и переводит результаты измерений в сигналы, считываемые микропроцессором контроллера. Кодер имеет ось, связанную с валом двигателя так, чтобы она вращалась вместе с валом. Таким образом, количество оборотов, скорость и направление вращения оси кодера указывают на направление, скорость движения и положение кабины лифта. Однако кодер вносит дополнительные расходы и сложность в лифтовую систему. Кроме того, кодер должен быть сконфигурирован так, чтобы он мог работать с большим количеством различных моделей двигателей. Таким образом, стоимость модернизации большого числа различных лифтовых систем будет очень высокой.
Примером такого рода систем является микропроцессорная система распределенного управления гидравлическим подъемником, описанная в патенте США 4787481 и рассматриваемая заявителем в качестве ближайшего аналога изобретения. В частности, в ней используется кодер в виде ленты с щелевой перфорацией и блок датчиков селектора, установленный на кабине лифта. Во время движения лифта вдоль ленты датчики селектора генерируют импульсы с частотой, соответствующей частоте перфорации. По этим импульсам определяется текущая координата, скорость и направление движения подъемника. Как отмечено выше, недостатком такой системы является ее сложность и высокая стоимость.
Сущность изобретения
Целью данного изобретения является обеспечение экономичного устройства и способа для определения скорости выравнивания кабины лифта.
Другой целью изобретения является обеспечение экономичного устройства и способа регулировки времени выравнивания на основе скорости выравнивания кабины лифта.
Согласно изобретению эти цели достигаются в способе и устройстве для регулирования уровня положения лифта, в частности времени выравнивания кабины лифта относительно площадки.
В одном варианте предложенный способ предусматривает последовательное получение и обработку сигналов от двух датчиков, расположенных на определенном расстоянии друг от друга, во время перемещения кабины лифта в шахте лифта. Отличия этого способа от вышеуказанного ближайшего аналога заключаются в том, что при обнаружении сигнала от первого датчика начинают отсчет времени, который заканчивают при обнаружении сигнала от второго датчика с определением интервала времени между моментами обнаружения сигналов от первого и второго датчиков. Путем деления указанного расстояния между датчиками на величину указанного интервала времени вычисляют скорость выравнивания кабины лифта и регулируют время выравнивания в зависимости от вычисленной скорости выравнивания.
Во втором варианте способ регулирования уровня положения лифта, в частности времени выравнивания кабины лифта относительно площадки, предусматривает обнаружение магнита двумя датчиками, расположенными на определенном расстоянии друг от друга, во время перемещения кабины лифта в шахте лифта. Отличия этого способа от вышеуказанного ближайшего аналога заключаются в том, что при обнаружении магнита первым датчиком начинают отсчет времени, который заканчивают при обнаружении магнита вторым датчиком с определением интервала времени между моментами обнаружения магнита первым и вторым датчиками. Путем деления указанного расстояния между датчиками на величину указанного интервала времени вычисляют скорость выравнивания кабины лифта, и регулируют время выравнивания в зависимости от вычисленной скорости выравнивания.
Регулирование времени выравнивания может включать в себя определение времени выравнивания путем деления пути, который должна пройти кабина лифта на скорости выравнивания до начала торможения, на скорость выравнивания. В качестве первого и второго датчиков могут выбираться датчики выравнивания.
Предложенное устройство для осуществления вышеописанных способов содержит носитель закодированной информации, размещенный в шахте лифта, первый датчик, установленный с возможностью подачи первого сигнала при обнаружении носителя закодированной информации, и второй датчик, установленный на заданном расстоянии от первого датчика с возможностью подачи второго сигнала при обнаружении носителя закодированной информации. Устройство отличается от ближайшего аналога тем, что содержит таймер для определения времени между первым и вторым сигналами и процессор, который связан с указанными датчиками с возможностью определения скорости выравнивания кабины лифта делением расстояния между первым и вторым датчиками на время между первым и вторым сигналами и регулирования времени выравнивания в зависимости от скорости выравнивания.
Процессор устройства может быть выполнен с возможностью вычисления пути прохождения кабины лифта на скорости выравнивания до начала торможения. В этом случае можно вычислять время выравнивания путем деления пути прохождения кабины лифта на скорости выравнивания до начала торможения, на скорость выравнивания.
Перечень фигур чертежей
На фиг. 1 представлен общий вид системы лифта, включающей предпочтительный вариант осуществления данного изобретения.
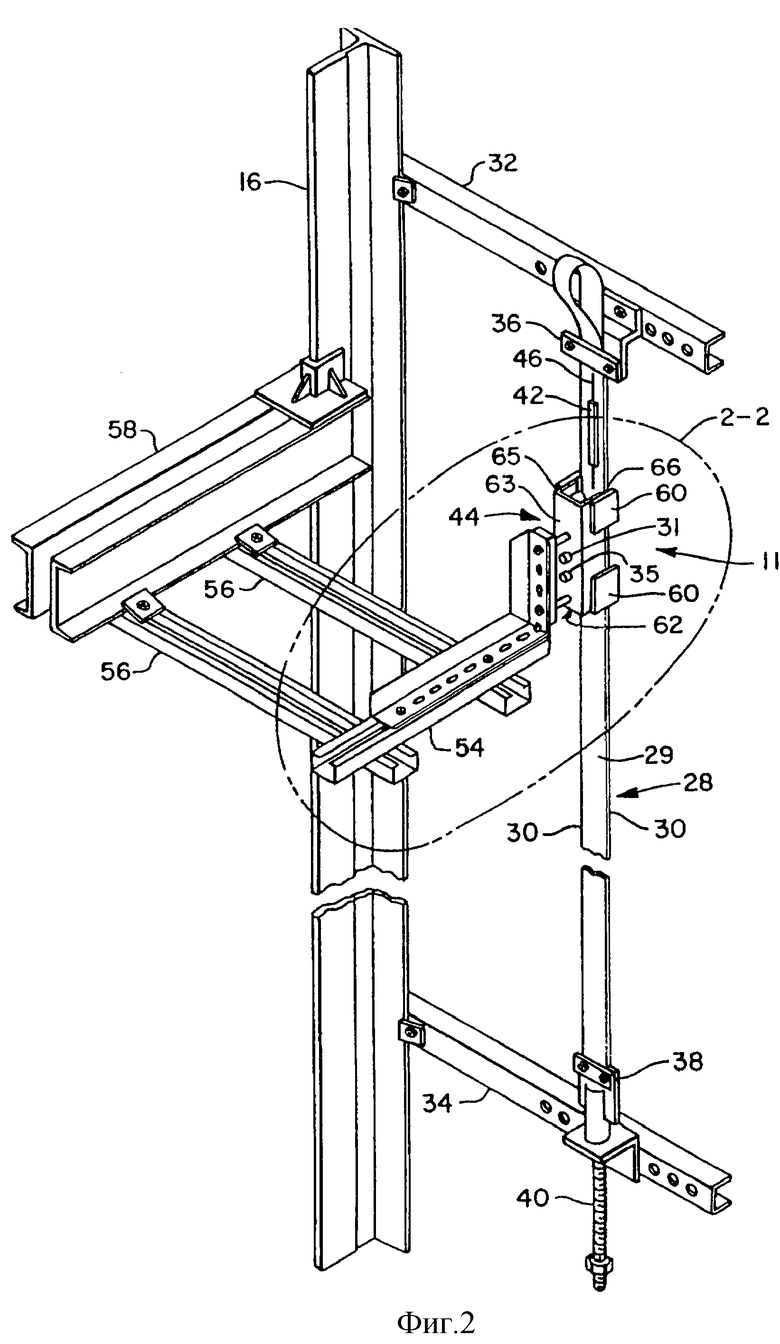
На фиг.2 представлен общий вид системы подвешенной ленты.
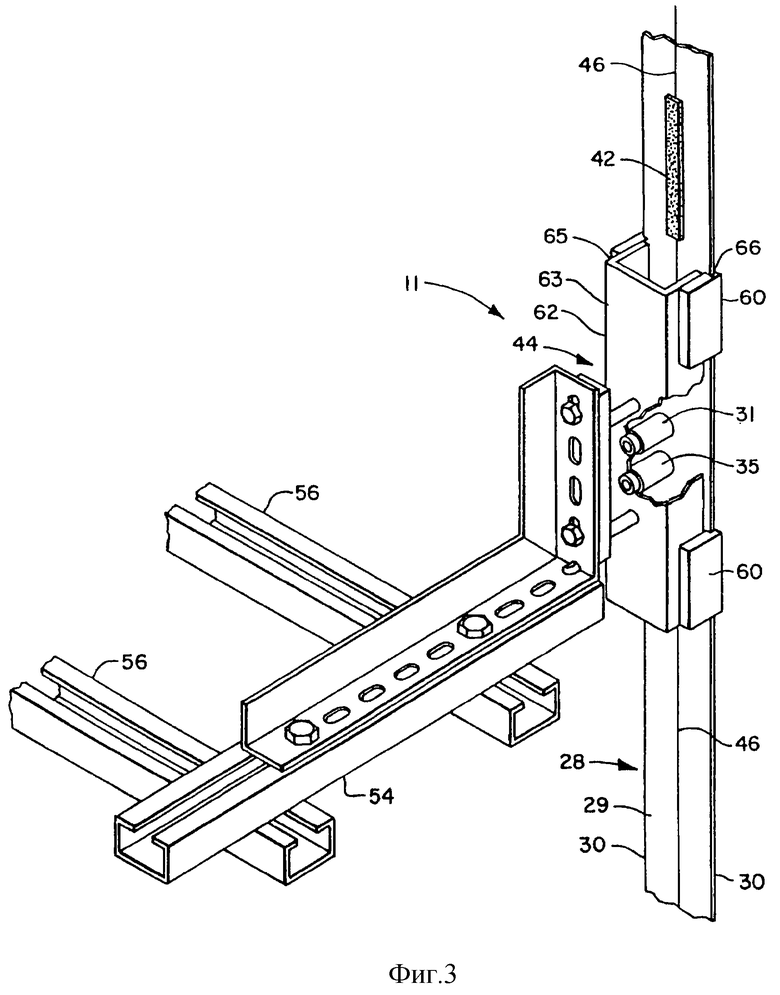
На фиг.3 представлен увеличенный вид системы подвешенной ленты по линиям 2-2 фиг.2.
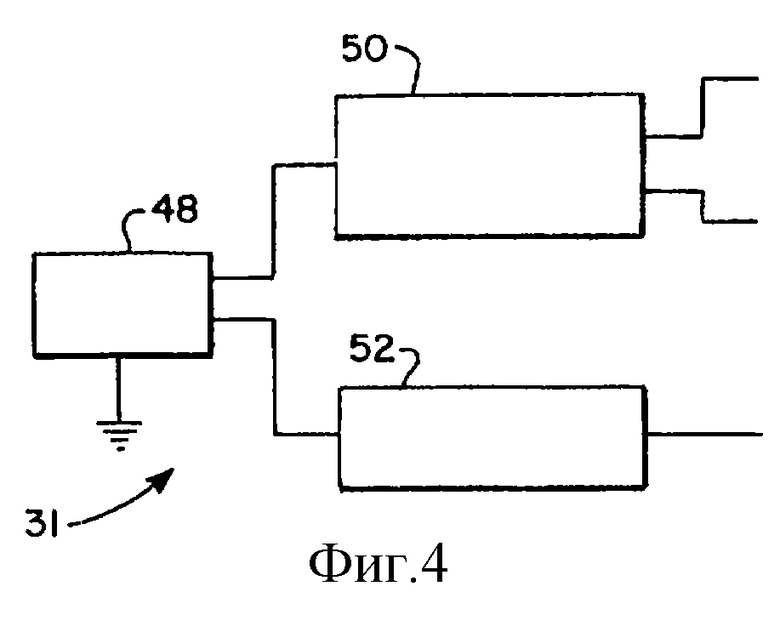
На фиг.4 представлена блок-схема предпочтительного варианта модуля датчика.
На фиг.5 представлена схема предпочтительного варианта модуля датчика.
На фиг.6 представлен вид спереди предпочтительного варианта считывающего устройства.
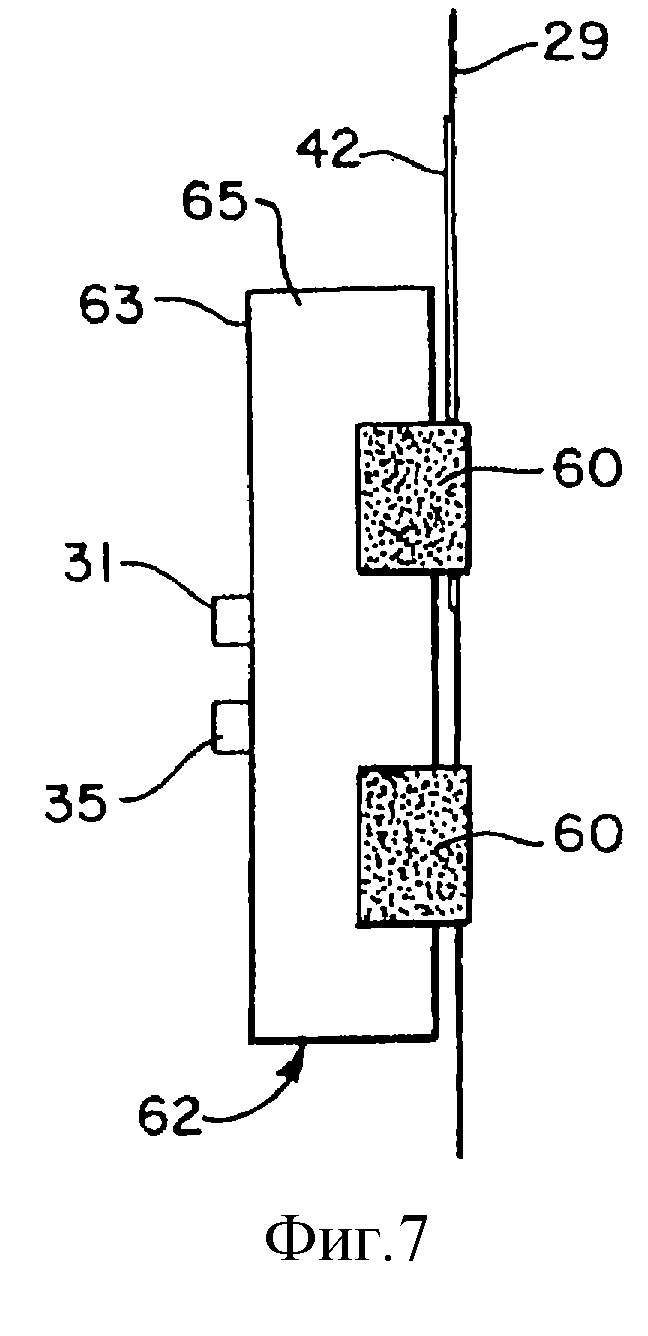
На фиг. 7 представлен вид сбоку предпочтительного варианта считывающего устройства.
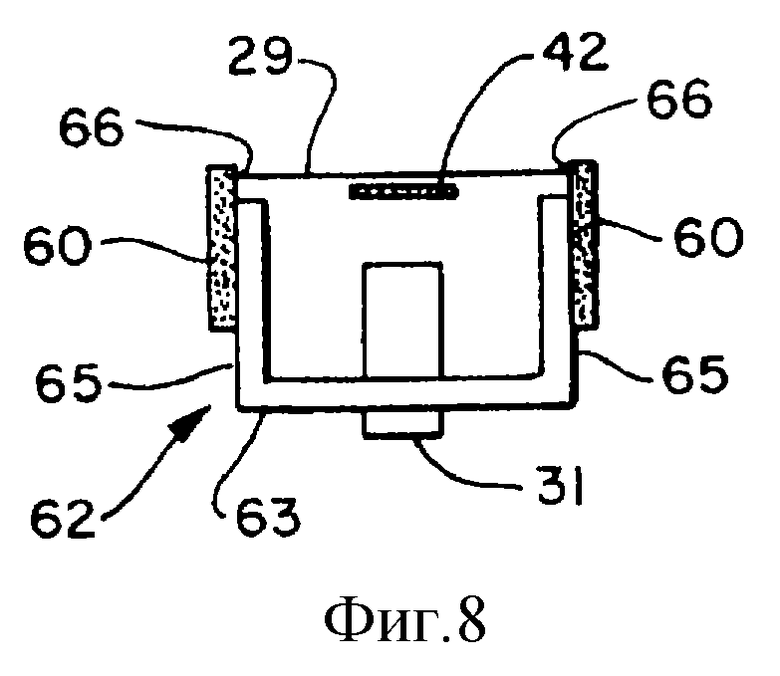
На фиг.8 представлен вид сверху предпочтительного варианта считывающего устройства.
На фиг.9 представлена блок-схема контроллера лифта.
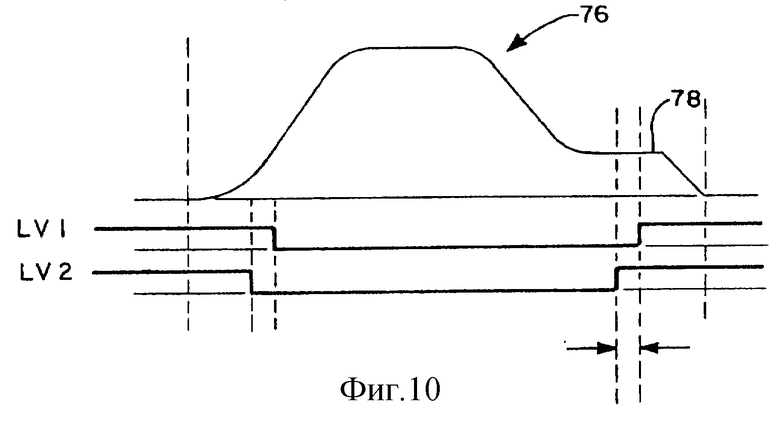
На фиг.10 представлена временная диаграмма графика скорости кабины лифта и сигналов выравнивания.
На фиг.11 представлена временная диаграмма графика скорости кабины лифта и сигналов выравнивания в зоне выравнивания.
На фиг. 12 представлена блок-схема, показывающая датчики выравнивания в первой и второй позициях.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 показана система лифта 10. Кабина 12 лифта расположена в шахте 14 лифта так, что она может перемещаться по направляющим рельсам 16, размещенным вертикально в шахте 14. Средство 18 управления дверью размещено на кабине 12 лифта таким образом, что оно может открывать и закрывать дверь 20, когда это необходимо. Контроллер 22 лифта размещен в машинном отделении 24, из которого осуществляется контроль и управление системой лифта 10. Кабель 26 используется для электрического соединения между контроллером 22 и электрическим оборудованием в шахте 14 лифта. Конечно, необходимо понимать, что изобретение может быть использовано с другими системами лифтов, включая гидравлические системы и системы с линейным двигателем.
На фиг. 2, 3 показано средство 11 определения положения кабины лифта, используемое в системе лифта 10 для точного определения положения кабины 12 лифта в шахте 14. Кроме того, в соответствии с изобретением средство 11 определения положения кабины лифта используется для обеспечения информации для контроллера 22 лифта так, что контроллер 22 лифта может должным образом регулировать скорость кабины 12 лифта, как это описано ниже. В предпочтительном варианте средство 11 определения положения кабины лифта включает носитель 28 закодированной информации, модули датчиков 31, 35 и считывающее устройство 44.
Показана реализация носителя 28 закодированной информации, который включает стальную ленту 29, имеющую внешние края 30, размещенную вертикально в шахте 14 лифта. Стальная лента 29 прикреплена к верхней и нижней горизонтальным опорам 32, 34 за верхнюю и нижнюю сцепки, 36 и 38 соответственно. Верхняя и нижняя опоры 32, 34 обеспечивают поддержку стальной ленты 28 в вертикальном положении и прикреплены к направляющим рельсам 16. Кроме того, для обеспечения натяжения стальной ленты 29 вместе с нижней сцепкой 38 используется пружина 40. Специалист в данной области техники должен понимать, что и другие подходящие носители закодированной информации могут быть использованы без отклонения от сути и объема изобретения.
Информация на носителе 28 может быть закодирована с использованием различных способов. Например, могут быть использованы оптические или механические способы кодирования. В одном из вариантов носитель 28 кодируется путем размещения магнитов 42 на стальной ленте 29 в определенных позициях. Например, магниты 42 размещаются на стальной ленте 29 в местах, соответствующих площадкам остановки лифта (не показаны), для маркировки соответствующей зоны позиционирования двери. В предпочтительном варианте стальная лента 29 включает от одной до трех дискретных вертикальных плоскостей 46 для размещения магнитов 42. Каждый магнит 42 размещается вдоль одной из плоскостей 46 в стальной ленте 29. Различные изменения длины и размещения магнитов могут быть произведены без отклонения от сути и объема изобретения, как это очевидно для специалистов в данной области техники.
На фиг.4, 5 показаны модули датчиков 31, 35, используемые для обнаружения кодирования, имеющегося на носителе 28 закодированной информации. В предпочтительном варианте модули датчиков 31, 35 являются приборами, основанными на эффекте Холла, вырабатывающими электрические сигналы при нахождении вблизи магнитов 42. Каждый модуль датчика 31, 35 включает датчик Холла 48 (например на p-n-p транзисторе, как показано на фиг.5), схему стабилизации напряжения 50 и усилителя мощности 52. Датчик Холла 48 вырабатывает сигнал при обнаружении магнитов 42. Стабилизатор напряжения 50 стабилизирует нестабилизированное напряжение, поступающее или от контроллера 22 или от батареи (не показано), и обеспечивает стабилизированное напряжение для датчика Холла 48. Усилитель мощности 52 обеспечивает усиление сигнала датчика так, что сигнал датчика может активизировать реле или лампочку, расположенные в контроллере 22 или в машинном отделении 24. Таким образом, сигнал датчика может передаваться непосредственно от модуля датчика 31, 35 в машинное отделение 24 без дальнейших преобразований. Специалистам известны подходящие схемы стабилизатора напряжения 50 и усилителя мощности 52. Хотя приведенное описание иллюстрирует один вариант датчиков выравнивания, другие датчики могут быть использованы без отклонения от сути и объема изобретения. Например, в качестве датчика в данном изобретении может быть использован магнитный переключатель или индуктивный преобразователь.
Считывающее устройство 44, показанное на фиг.2, 3, прикрепляется к угловому кронштейну 54, который прикрепляется к монтажным швеллерам 56, которые в свою очередь прикрепляются к траверсе 58 кабины 12 лифта. В результате считывающее устройство 44 перемещается с кабиной 12 лифта по мере того, как кабина 12 перемещается в шахте 14 лифта. Считывающее устройство 44 перемещает модули датчиков 31, 35 вдоль носителя 28 закодированной информации при перемещении кабины 12 в шахте 14 лифта.
На фиг. 6, 7 и 8 показано, что считывающее устройство 44 включает направляющие элементы 60 и швеллер 62, имеющий монтажную пластину 63 и две опоры 65, отходящие под углом девяносто градусов от монтажной пластины 63. Монтажная пластина 63 имеет отверстия 64 для монтажа модулей датчиков 31, 35. В предпочтительном варианте четыре направляющих элемента 60 прикреплены к швеллеру 62 для облегчения движения считывающего устройства 44 вдоль носителя 28 закодированной информации. Каждый направляющий элемент 60 имеет продольную канавку 66, предназначенную для приема и удерживания внешних краев 30 стальной ленты 29. По мере того как кабина 12 перемещается в шахте 14 лифта, считывающее устройство 44 перемещается в том же направлении, и внешние края 30 стальной ленты 29 скользят в канавках 66 в направляющих элементах 60. Таким образом, обеспечивается постоянное расстояние между модулями датчиков 31, 35 и стальной лентой 29 по мере того, как считывающее устройство 44 перемещается в шахте 14 лифта.
Группа отверстий 64 предназначена для монтажа модулей датчиков 31, 35. Модули датчиков 31, 35 размещены в отверстиях таким образом, что они (модули датчиков) обращены к стальной ленте 29 и закреплены на швеллере 62 обычным образом с использованием известных крепежных элементов таких, как гайка 70. Модули датчиков 31, 35 расположены в той же плоскости 46, что и соответствующий магнит 42 так, что модули датчиков 31, 35 обнаруживают соответствующий магнит 42 при перемещении кабины 12 и считывающего устройства 44 в шахте 14 лифта. Соответственно, модули датчиков 31, 35 находятся на определенном расстоянии dL друг от друга. В одном варианте это расстояние dL между модулями 31, 35 датчиков 31, 35 составляет 3 см.
Модуль датчика (31 или 35), первым обнаруживающий магнит, определяется как первый датчик выравнивания и вырабатывает первый сигнал LV1 выравнивания. Аналогично, модуль датчика (31 или 35), вторым обнаруживающий магнит, определяется как второй датчик выравнивания и вырабатывает второй сигнал LV2 выравнивания. Эти сигналы выравнивания LV1 и LV2, в одном варианте, передаются в контроллер по кабелю. Однако сигналы могут передаваться другими различными способами без отклонения от сути и объема изобретения. В данном изобретении сигналы выравнивания LV1 и LV2 используются для определения скорости vL выравнивания, как описано ниже.
На фиг. 9 показан контроллер 22 лифта, который включает процессор 72 и память 74. В одном варианте в качестве процессора используется микроконтроллер Intel 80C196. В другом варианте в качестве памяти 74 используется NECμPD43256AGU-85L (32К*8 бит, статическая CMOS RAM). Процессор 72 выполняет команды, хранящиеся в памяти 74. Один такой набор команд позволяет контроллеру 22 регулировать время выравнивания кабины 12 лифта, как это описано ниже.
На фиг. 10, 11 приведены временные диаграммы, на которых представлены график 76 скорости кабины 12 лифта и сигналы выравнивания LV1 и LV2. Часть 78 (зона выравнивания) графика 76 скорости включает время Тstop выравнивания и время Rstop торможения. Отсчет времени Тstop выравнивания начинается, когда второй датчик выравнивания обнаруживает магнит, и заканчивается в определенный момент. Время Тstop выравнивания имеет переменную величину и регулируется в зависимости от скорости vL выравнивания кабины лифта, как это описано ниже. Отсчет времени Rstop торможения начинается в определенный момент и заканчивается в момент полной остановки кабины лифта на нужной площадке. Время Rstop торможения имеет постоянную величину. В одном варианте время Rstop торможения выбрано равным 500 мс.
Скорость кабины лифта в сегменте выравнивания Тstop определяется как скорость vL выравнивания. Скорость vL выравнивания должна быть достаточно большой, чтобы кабина 12 лифта не остановилась раньше, чем будет достигнута нужная площадка. Например, скорость vL выравнивания должна быть достаточно большой для того, чтобы преодолеть трение, вызываемое различными устройствами в системе 10 лифта, в частности коробкой передач (не показано) и шахтой 14 лифта. Если скорость vL выравнивания слишком мала, то инерции кабины 12 может не хватить для того, чтобы преодолеть трение, и она медленно остановится вне зоны дверей. И наоборот, скорость vl выравнивания должна быть достаточно малой, чтобы торможение кабины 12 лифта было плавным в течение времени Rstop торможения при подходе к конечной точке остановки. Если скорость vL выравнивания слишком велика, торможение в течение времени Rstop торможения может быть слишком резким и, таким образом, ухудшаются характеристики комфортности пользования лифтом. В одном варианте скорость vL выравнивания задается равной 10 см/с.
Скорость кабины лифта в течение времени Rstop торможения - это скорость Vd торможения. Скорость vd торможения определяется как необходимое уменьшение скорости кабины лифта от скорости vL выравнивания до нуля в течение времени Rstop торможения. В одном варианте шаг уменьшения скорости вычисляется путем деления скорости vL выравнивания на время Rstop торможения. В этом случае шаг уменьшения скорости рекурсивно вычитается из скорости кабины лифта в каждый данный интервал времени, например каждые 10 мс, пока скорость vd торможения не достигнет нуля в точке остановки кабины лифта.
Изменения некоторых параметров лифта, например нагрузки, могут вызывать изменения скорости vL выравнивания. Для того чтобы кабина лифта точно останавливалась на нужной площадке, система 10 лифта должна быть регулируемой в зависимости от изменений скорости vL выравнивания иначе кабина 12 лифта может проскакивать или не доходить до нужной площадки. Если система 10 лифта имеет кодер скорости, то эти изменения скорости могут быть обнаружены кодером скорости и откорректированы. Однако если используется система, не имеющая кодера, то скорость vL выравнивания должна определяться другим способом, и точная остановка кабины у нужной площадки достигается за счет использования альтернативного способа. Изобретение использует датчики 31, 35 выравнивания для определения скорости vl выравнивания так, чтобы время Rstop торможения могло регулироваться в зависимости от любых изменений скорости vL выравнивания, как это описано выше.
Скорость vL выравнивания кабины 12 лифта определяется по формуле: скорость = расстояние/время. Как указывалось выше, расстояние dL между датчиками известно. Время между срабатываниями первого датчика выравнивания и второго датчика выравнивания определяется с помощью таймера, встроенного в процессор 72. Когда срабатывает первый датчик в момент обнаружения магнита 42, то он вырабатывает первый сигнал LV1 выравнивания. Первый сигнал LV1 выравнивания используется в качестве сигнала прерывания, который вызывает начало измерения времени, при этом величина, записанная в таймере, запоминается в памяти 74. Когда срабатывает второй датчик в момент обнаружения магнита 42, то он вырабатывает второй сигнал LV2 выравнивания, который также используется в качестве сигнала прерывания. Второй сигнал выравнивания выключает измерение времени, и величина, записанная в таймере, снова запоминается в памяти 74. Разница между двумя этими значениями времени, умноженная на константу, является измеренным интервалом tM, времени, то есть временем, которое затрачивается на прохождение расстояния dL между первым и вторым датчиками выравнивания для реальной скорости vL выравнивания. В одном варианте константа равна 1,6 мкс на один отсчет таймера, то есть процессор посылает импульсы в таймер с периодом 1,6 мкс так, что если насчитано 1000 импульсов, то временной интервал равен 1,6 мс. Счетчик автоматически получает импульсы из процессора 72, и никакие программы не нужны. Однако специалисту понятно, что таймер может быть реализован и программными средствами. Наконец, реальная скорость vL выравнивания кабины лифта определяется процессором 72 путем деления расстояния dL на измеренный интервал tM времени. Например, если расстояние dL равно 3 см, и измеренный интервал tM времени равен 310 мс, то реальная скорость vL выравнивания равна 9,8 см/с.
На фиг. 12 показано, как время Тstop выравнивания регулируется в зависимости от реальной скорости vL выравнивания. Когда датчики 31, 35 выравнивания находятся в положении 1, реальная скорость vL выравнивания уже определена, как это было описано выше. Расстояние dL между двумя датчиками выравнивания 31, 35 известно. Расстояние d между концом магнита 80 и точкой 82 выравнивания известно. Время Rstop торможения также известно. Время Тstop выравнивания определяется по этой информации следующим образом. Расстояние, которое должна пройти кабина лифта, чтобы точка выравнивания оказалась посредине между датчиками 31, 35, равно d-dL/2. По определению кабина лифта выровнена, когда средняя точка между датчиками 31, 35 оказывается на уровне точки 82 выравнивания. Расстояние dRD, которое проходит кабина лифта за время Rstop торможения, определяется с помощью уравнения dRD=vL•Rstop•0,5. Полный путь dLEFT, который должна пройти кабина лифта с текущей скоростью до начала торможения, определяется уравнением dLEFT=d-dL/2-dRD. Поэтому время, необходимое для прохождения пути dLEFT, определяется уравнением Тstop= dLEFT/VL.
Время Tstop выравнивания записывается во второй таймер в процессоре 72 таким образом, что второй таймер начинает вычитать из этой величины тактовые импульсы. При обнулении второго таймера вырабатывается сигнал прерывания. В этот момент начинается время Rstop торможения, и кабина лифта тормозится до тех пор, пока она не остановится точно напротив площадки. Таким образом, время Тstop выравнивания регулируется для компенсации изменений скорости vL выравнивания. Конечно, специалисту в данной области техники должно быть ясно, что второй таймер может быть реализован различными способами. Например, второй таймер может быть реализован программно.
Данное изобретение обеспечивает точное выравнивание без использования кодера скорости. Таким образом, изобретение позволяет устранить затраты и сложность, которые связаны с кодерами скорости. Кроме того, при использовании изобретения снижается стоимость модернизации большого разнообразия систем лифтов по сравнению с системами, использующими кодеры скорости, поскольку нет необходимости конфигурировать систему в зависимости от двигателя лифта.
Для специалиста в данной области техники ясно, что могут быть произведены различные изменения вышеприведенного описания без отклонения от сути и объема изобретения.





Изобретение относится к регулировке выравнивания кабины лифта относительно площадки. Способ включает в себя последовательное получение и обработку сигналов от двух датчиков, расположенных на определенном расстоянии друг от друга, или обнаружение магнита двумя датчиками, расположенными на определенном расстоянии друг от друга, во время перемещения кабины лифта в шахте лифта. Определяют скорость выравнивания и задают время торможения кабины лифта, в зависимости от которых регулируют время выравнивания. В устройстве датчики установлены на заданном расстоянии один от другого с возможностью подачи сигналов при обнаружении носителя закодированной информации. Для определения времени между первым и вторым сигналами с датчиками связан таймер. С указанными датчиками и таймером связан процессор для определения скорости выравнивания кабины лифта и регулирования времени выравнивания в зависимости от скорости выравнивания и заданного времени торможения. Технический результат - упрощение устройства и снижение его стоимости. 3 с. и 5 з.п. ф-лы, 12 ил.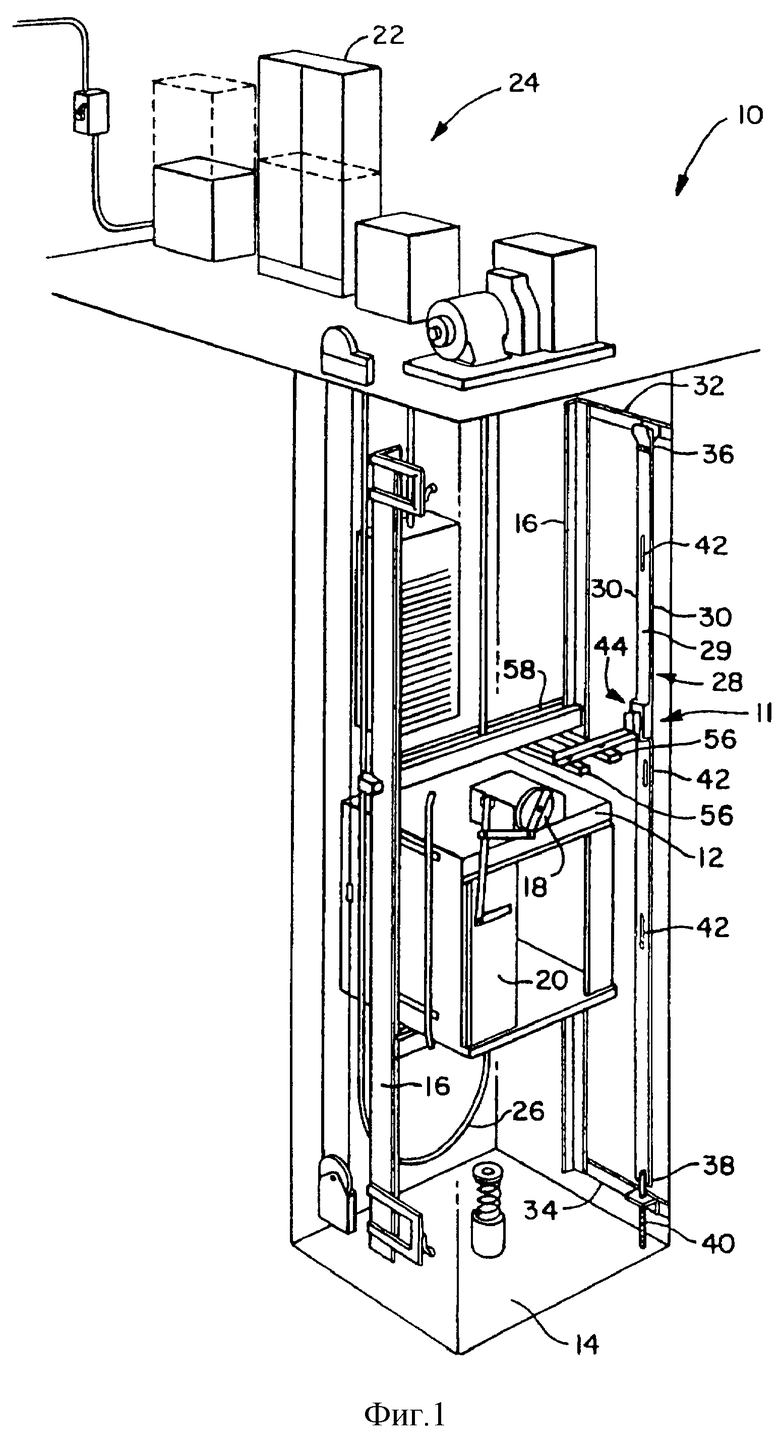
| US 4787481 A, 29.11.1988 | |||
| SU 757449 A, 23.08.1980 | |||
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Система управления целевым вызовом для подъемного устройства с по меньшей мере одним подъемником с одной или несколькими кабинами | 1988 |
|
SU1838224A3 |
| В.П | |||
| Бухгольц и др | |||
| Путевые датчики контроля подвижного состава на рельсовом транспорте | |||
| - М.: Транспорт, 1976 | |||
| Системы автоматического и телемеханического управления электроподвижным составом | |||
| Под ред | |||
| д.т.н | |||
| Л.А | |||
| Баранова | |||
| - М.: Транспорт, 1984. | |||

