Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы после проведения подземного ремонта.
Наиболее близкой по технической сущности является система управления электроцентробежным насосом, реализующая способ вывода скважины, оборудованной установкой электроцентробежного насоса с частотно-регулируемым приводом, на стационарный режим работы (см. патент Российской Федерации №2181829, опубл. 27.04.2002, Бюл. №12), содержащая блок задания диаграммы динамического уровня жидкости в скважине, блок сравнения, блок расчета частоты питающего напряжения, частотный преобразователь, погружной электроцентробежный насос и датчик динамического уровня жидкости в скважине.
Недостатком наиболее близкой системы управления погружным электроцентробежным насосом является то, что для технической реализации блока задания диаграммы динамического уровня, блока сравнения и блока расчета частоты питающего напряжения необходимо использовать программируемый контроллер. Это усложняет техническую реализацию и, как следствие, снижает надежность системы управления погружным электроцентробежным насосом.
Сущность изобретения заключается в том, что в систему управления погружным электроцентробежным насосом, содержащую блок задания динамического уровня жидкости, датчик динамического уровня жидкости, частотный преобразователь, погружной электроцентробежный насос, причем выход частотного преобразователя подключен к погружному электроцентробежному насосу, введены первый и второй апериодические фильтры и пропорционально-интегральный регулятор, причем выход блока задания динамического уровня жидкости соединен с входом первого апериодического фильтра, выход которого соединен с первым входом пропорционально-интегрального регулятора, выход датчика динамического уровня жидкости соединен с входом второго апериодического фильтра, выход которого соединен с вторым входом пропорционально-интегрального регулятора, выход которого соединен с входом частотного преобразователя.
Существенные отличия находят свое выражение в новой совокупности связей между блоками устройства. Указанная совокупность связей позволяет упростить техническую реализацию системы управления погружным электроцентробежным насосом и повысить надежность ее работы.
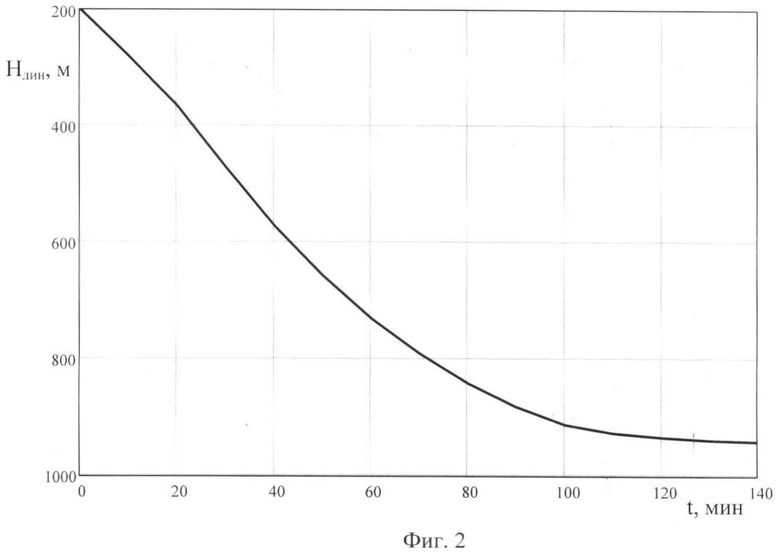
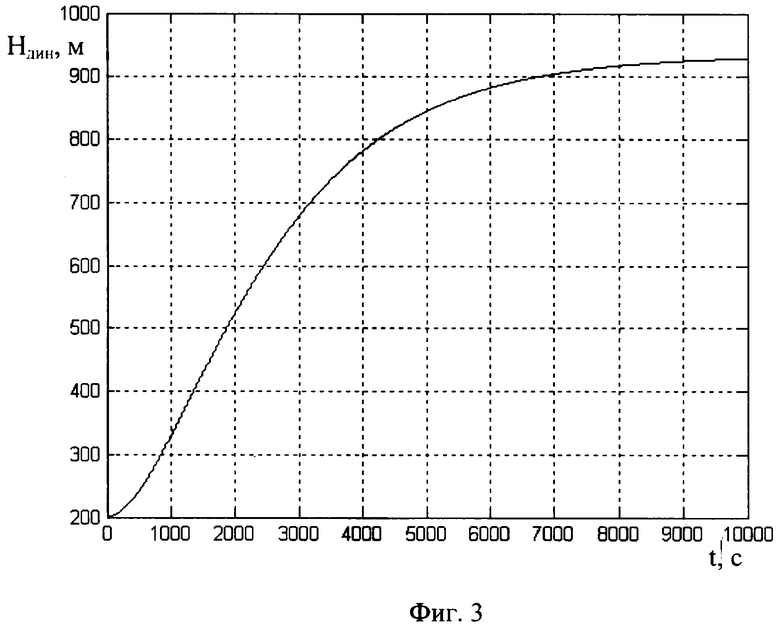
На фиг.1 представлена функциональная схема системы управления погружным электроцентробежным насосом; на фиг.2 изображен примерный график изменения динамического уровня жидкости в скважине; на фиг.3 приведен график переходного процесса в предлагаемой системе управления погружным электроцентробежным насосом.
Система управления (фиг.1) погружным электроцентробежным насосом содержит блок 1 задания динамического уровня жидкости, апериодические фильтры 2 и 3, датчик 4 динамического уровня жидкости, пропорционально-интегральный регулятор 5, частотный преобразователь 6, погружной электроцентробежный насос 7.
Выход блока 1 задания динамического уровня жидкости соединен с входом апериодического фильтра 2, выход которого соединен с первым входом пропорционально-интегрального регулятора 5. Выход датчика 4 динамического уровня жидкости соединен с входом апериодического фильтра 3, выход которого соединен с вторым входом пропорционально-интегрального регулятора 5. Выход пропорционально-интегрального регулятора 5 соединен с входом частотного преобразователя 6, к выходу которого подключен погружной электроцентробежный насос 7.
Блок 1 задания динамического уровня жидкости, апериодические фильтры 2 и 3, пропорционально-интегральный регулятор 5 и частотный преобразователь 6 могут быть реализованы, например, на преобразователе MICROMASTER 440 фирмы Сименс с помощью его внутренних функциональных возможностей. В частности, параметром Р2200 может быть разрешено использование, например, пропорционально-интегрального регулятора, параметрами Р2201 и Р2253 формируется фиксированное задание регулятору, параметром Р2261 - постоянная времени фильтра задания, параметром Р2264 - источник обратной связи для регулятора, например аналоговый вход, параметром Р2265 - постоянная времени фильтра обратной связи, параметром Р2280 - коэффициент усиления регулятора, параметром Р2285 - постоянная времени интегрирования регулятора. В качестве датчика 4 динамического уровня жидкости может быть использован, например, стационарный эхолот Микон-801. В качестве погружного электроцентробежного насоса 7 может быть использована, например, установка УЭЦНМ5-80-1200 с повышающим трансформатором, согласующим выходное напряжение частотного преобразователя с напряжением на статорных обмотках погружного электродвигателя, входящего в состав электроцентробежного насоса.
Система управления погружным электроцентробежным насосом работает следующим образом. По результатам предыдущего освоения данной скважины строят график изменения динамического уровня жидкости в скважине (фиг.2). На фиг.2 представлен график изменения динамического уровня жидкости скважины 67 Кудиновского месторождения внутренним диаметром 126 мм, оборудованной установкой УЭЦН5-80-1200, спущенной на насосно-компрессорных трубах наружным диаметром 73 мм. На вход пропорционально-интегрального регулятора 5 через апериодический фильтр 2 подают сигнал, соответствующий требуемой величине динамического уровня жидкости в скважине. Для рассматриваемого примера динамический уровень жидкости должен застабилизироваться на отметке 935 м. Этот задающий сигнал выполняет функцию блока 1 задания динамического уровня жидкости. После включения системы управления на входе частотного преобразователя 6 начинает формироваться сигнал в соответствии с передаточными функциями апериодического фильтра 2 и пропорционально-интегрального регулятора 5. Частотный преобразователь 6 заставляет вращаться асинхронный электродвигатель погружного электроцентробежного насоса 7, в результате чего происходит отбор жидкости из затрубного пространства скважины, и динамический уровень начинает изменяться. Датчик 4 динамического уровня измеряет фактическую величину уровня жидкости в скважине и подает сигнал, пропорциональный этой величине, на вход обратной связи пропорционально-интегрального регулятора 5 через апериодический фильтр 3. Пропорционально-интегральный регулятор 5 вычисляет разность входного сигнала и сигнала обратной связи и в соответствии с параметрами своей передаточной функции опять же формирует сигнал управления частотному преобразователю 6. Далее работа системы управления погружным электроцентробежным насосом продолжается, и скважина автоматически выходит на стационарный режим работы.
Для того чтобы фактический график изменения динамического уровня жидкости при выводе скважины на стационарный режим совпал с желаемым, например, приведенным на фиг.2, параметры передаточных функций апериодических фильтров 2 и 3 и пропорционально-интегрального регулятора 5 должны выбираться из следующих соотношений. Постоянные времени апериодических фильтров 2 и 3
где коэффициенты а0 и а1 находятся, например, из решения системы уравнений
Первая  и вторая
и вторая  производные динамического уровня в i-момент времени определяются из графика по формулам:
производные динамического уровня в i-момент времени определяются из графика по формулам:

где Т - период между соседними измерениями динамического уровня. Установившееся значение Нуст динамического уровня жидкости и его значение в i-момент времени H(i) также определяются из графика. Коэффициент передачи, пропорциональной части регулятора 5, определяется по формуле
Постоянную времени интегрирования регулятора 5 вычисляют из соотношения
Здесь g - ускорение свободного падения. Коэффициенты передачи силового преобразователя kcn и асинхронного электродвигателя k∂у3 принимаются равными единице. Коэффициент передачи центробежного насоса kнас рассчитывается по его гидравлической характеристике. Коэффициент продуктивности пласта knp и усредненная плотность ρ жидкости в скважине определяются по результатам предыдущего освоения. Площадь затрубного пространства вычисляется по формуле
где dк - внутренний диаметр эксплуатационной колонны; dнкт - наружный диаметр насосно-компрессорных труб.
Для рассматриваемого примера скважины 67 Кудиновского месторождения и фиг.2 рассчитаны все приведенные выше параметры: kcn=1; kДУ3=1; kнас=2,949·10-6 м3/рад;
knp=1,0275·10-10 м3/с·Па; ρ=900 кг/м3; g=9,81 м/с2; dк=0,126 м; dнкт=0,073 м; Sз=0,0083 м2;
Нуст=935 м; Н(3)=470 м; Н(4)=573 м;  ;
;  ;
;  ;
;  ; T=600 с; a0=1689000 c2; a1=2730 c.
; T=600 с; a0=1689000 c2; a1=2730 c.
Отсюда следуют требуемые настройки апериодических фильтров 2 и 3 и пропорционально-интегрального регулятора 5: Тф=618 с; kn=1,031; Тu=8874 с.
Моделирование системы управления погружным электроцентробежным насосом в программной среде «MATLAB SIMULINK» и построение графика переходного процесса (фиг.3) показывает, что в системе наблюдается изменение динамического уровня жидкости, близкое к требуемому, представленному на фиг.2. Максимальная динамическая погрешность составляет 4,2% от установившегося значения. Статическая точность определяется только погрешностью датчика динамического уровня, поскольку в системе применен астатический пропорционально-интегральный регулятор, компенсирующий все помехи, действующие после его выхода.
Таким образом, предложенная система управления погружным электроцентробежным насосом позволяет упростить техническую реализацию и повысить надежность работы за счет соответствующего использования функциональных возможностей серийно выпускаемых частотно-регулируемых электроприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2010 |
|
RU2442024C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ И КУСТОВОЙ НАСОСНОЙ СТАНЦИЕЙ | 2012 |
|
RU2501980C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ И КУСТОВОЙ НАСОСНОЙ СТАНЦИЕЙ | 2015 |
|
RU2604473C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2015 |
|
RU2605871C1 |
| Система управления погружным электроцентробежным насосом | 2024 |
|
RU2825919C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2007 |
|
RU2341004C1 |
| Управляемая система скважинной погружной электронасосной установки | 2014 |
|
RU2619003C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2021 |
|
RU2770528C1 |
| СИСТЕМА УПРАВЛЕНИЯ АППАРАТОМ ВОЗДУШНОГО ОХЛАЖДЕНИЯ МАСЛА | 2012 |
|
RU2487290C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2007 |
|
RU2345464C1 |
Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы после проведения подземного ремонта. Система управления погружным электроцентробежным насосом содержит блок 1 задания динамического уровня жидкости, апериодические фильтры 2 и 3, датчик 4 динамического уровня жидкости, пропорционально-интегральный регулятор 5, частотный преобразователь 6, выход которого подключен к погружному электроцентробежному насосу 7. Выход блока 1 задания динамического уровня соединен с входом первого фильтра 2, выход которого соединен с первым входом пропорционально-интегрального регулятора 5. Выход датчика 4 соединен с входом второго фильтра 3, выход которого соединен со вторым входом регулятора 5, выход которого соединен с входом частотного преобразователя 6. Система управления позволяет упростить техническую реализацию и повысить надежность работы за счет соответствующего использования функциональных возможностей серийно выпускаемых частотно-регулируемых электроприводов. 3 ил.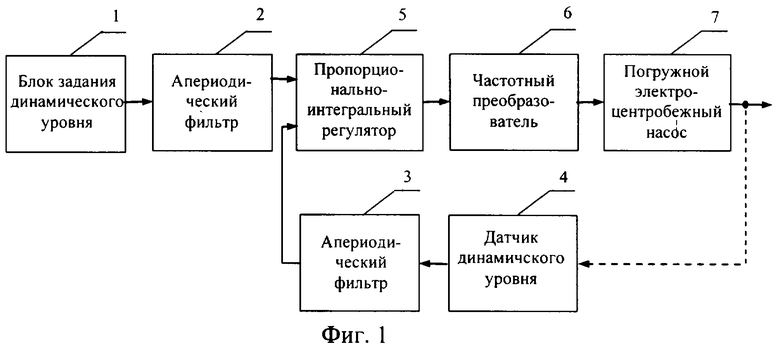
Система управления погружным электроцентробежным насосом, содержащая блок задания динамического уровня жидкости, датчик динамического уровня жидкости, частотный преобразователь, погружной электроцентробежный насос, причем выход частотного преобразователя подключен к погружному электроцентробежному насосу, отличающаяся тем, что в нее введены первый и второй апериодические фильтры и пропорционально-интегральный регулятор, причем выход блока задания динамического уровня жидкости соединен с входом первого апериодического фильтра, выход которого соединен с первым входом пропорционально-интегрального регулятора, выход датчика динамического уровня жидкости соединен с входом второго апериодического фильтра, выход которого соединен с вторым входом пропорционально-интегрального регулятора, выход которого соединен с входом частотного преобразователя.
| СПОСОБ ВЫВОДА СКВАЖИНЫ, ОБОРУДОВАННОЙ УСТАНОВКОЙ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ, НА СТАЦИОНАРНЫЙ РЕЖИМ РАБОТЫ | 2000 |
|
RU2181829C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПОГРУЖНЫХ ЦЕНТРОБЕЖНЫХ НАСОСНЫХ АГРЕГАТОВ В ГРУППЕ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2050472C1 |
| Способ регулирования динамического уровня жидкости в скважине | 1990 |
|
SU1809006A1 |
| US 6798338 В1, 28.09.2004 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

