Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы, а также в процессе длительной эксплуатации скважины.
Наиболее близкой по технической сущности является система управления электроцентробежным насосом, (см. патент Российской Федерации №2370673, опубл. 20.10.2009, Бюл. №29), содержащая блок задания динамического уровня жидкости, два апериодических фильтра, пропорционально-интегральный регулятор, частотный преобразователь, погружной электроцентробежный насос и датчик динамического уровня жидкости.
Недостатком наиболее близкой системы управления погружным электроцентробежным насосом является то, что по мере отбора жидкости из скважины и падения давление в нефтяном пласте снижается дебит скважины при одном и том же динамическом уровне жидкости, который поддерживает система.
Сущность изобретения заключается в том, что в систему управления погружным электроцентробежным насосом и кустовой насосной станцией, содержащую блок задания динамического уровня жидкости, первый и второй апериодические фильтры, первый пропорционально-интегральный регулятор, первый частотный преобразователь, погружной электроцентробежный насос и датчик динамического уровня жидкости, причем выход блока задания динамического уровня жидкости соединен с входом первого апериодического фильтра, выход которого соединен с первым входом первого пропорционально-интегрального регулятора, выход первого пропорционально-интегрального регулятора соединен с входом первого частотного преобразователя, выход которого подключен к погружному электроцентробежному насосу, выход датчика динамического уровня жидкости соединен с входом второго апериодического фильтра, выход которого соединен с вторым входом первого пропорционально-интегрального регулятора, дополнительно введены блок задания частоты вращения, второй пропорционально-интегральный регулятор, второй частотный преобразователь и кустовая насосная станция, причем выход блока задания частоты вращения соединен с первым входом второго пропорционально-интегрального регулятора, выход которого соединен с входом второго частотного преобразователя, выход первого пропорционально-интегрального регулятора соединен с вторым входом второго пропорционально-интегрального регулятора, а к выходу второго частотного преобразователя подключена кустовая насосная станция.
Существенные отличия находят свое выражение в новой совокупности связей между блоками устройства. Указанная совокупность связей позволяет стабилизировать дебит нефтяной скважины.
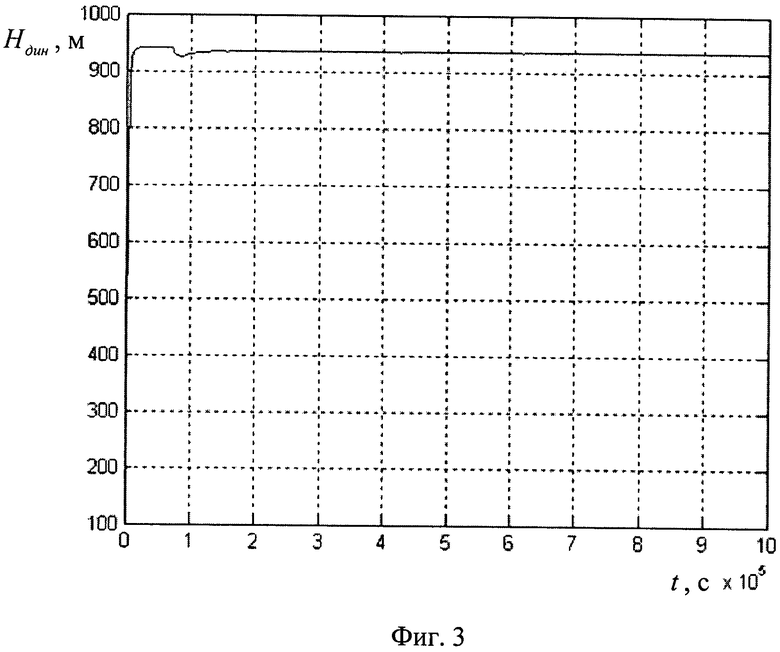
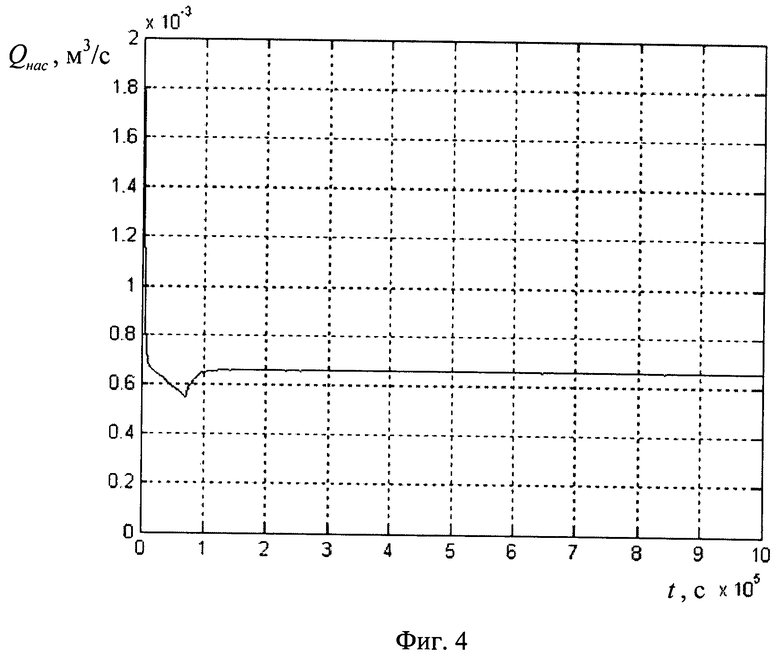
На фиг.1 представлена функциональная схема системы управления погружным электроцентробежным насосом и кустовой насосной станцией; на фиг.2 изображена расчетная модель системы управления погружным электроцентробежным насосом и кустовой насосной станцией; на фиг.3 приведен график изменения динамического уровня жидкости в скважине при работе предлагаемой системы управления; на фиг.4 представлен график производительности погружного электроцентробежного насоса при работе предлагаемой системы.
Система управления (фиг.1) погружным электроцентробежным насосом и кустовой насосной станцией содержит блок 1 задания динамического уровня жидкости, блок 2 задания частоты вращения, апериодические фильтры 3 и 4, пропорционально-интегральные регуляторы 5 и 6, частотные преобразователи 7 и 8, погружной электроцентробежный насос 9, кустовую насосную станцию 10, датчик 11 динамического уровня жидкости.
Выход блока 1 задания динамического уровня жидкости соединен с входом апериодического фильтра 2, выход которого соединен с первым входом пропорционально-интегрального регулятора 5. Выход пропорционально-интегрального регулятора 5 соединен с входом частотного преобразователя 7, выход которого подключен к погружному электроцентробежному насосу 9, выход датчика 11 динамического уровня жидкости соединен с входом апериодического фильтра 4, выход которого соединен с вторым входом пропорционально-интегрального регулятора 5. Выход блока 2 задания частоты вращения соединен с первым входом пропорционально-интегрального регулятора 6, выход которого соединен с входом частотного преобразователя 8. Выход пропорционально-интегрального регулятора 5 соединен с вторым входом пропорционально-интегрального регулятора 6. К выходу частотного преобразователя 8 подключена кустовая насосная станция 10.
Блок 1 задания динамического уровня жидкости, блок 2 задания частоты вращения, апериодические фильтры 3 и 4, пропорционально-интегральные регуляторы 5 и 6 могут быть реализованы, например, на программируемом логическом контроллере, например, S7-300. В качестве частотных преобразователей 7 и 8 могут быть использованы, например, преобразователи MICROMASTER 440. В качестве погружного электроцентробежного насоса 9 может быть применена, например, установка УЭЦНМ5-80-1200 с повышающим трансформатором, согласующим выходное напряжение частотного преобразователя с напряжением на статорных обмотках погружного электродвигателя, входящего в состав электроцентробежного насоса. В качестве кустовой насосной станции 10 может быть использована, например, станция типа ППД400-200. В качестве датчика 11 динамического уровня жидкости может быть применен, например, стационарный эхолот Микон-801.
Система управления погружным электроцентробежным насосом и кустовой насосной станцией работает следующим образом. После включения системы управления на входе частотного преобразователя 7 начинает формироваться сигнал в соответствии с сигналом, поступающим с выхода блока 1 задания динамического уровня жидкости, и передаточными функциями апериодического фильтра 3 и пропорционально-интегрального регулятора 5. Частотный преобразователь 7 заставляет вращаться асинхронный электродвигатель погружного электроцентробежного насоса 9, в результате чего происходит отбор жидкости из затрубного пространства скважины, и динамический уровень начинает изменяться. Датчик 11 динамического уровня измеряет фактическую величину уровня жидкости в скважине и подает сигнал, пропорциональный этой величине на вход обратной связи пропорционально-интегрального регулятора 5 через апериодический фильтр 4. Пропорционально-интегральный регулятор 5 вычисляет разность входного сигнала и сигнала обратной связи и в соответствии с параметрами своей передаточной функции опять же формирует сигнал управления частотному преобразователю 7. Далее работа системы управления погружным электроцентробежным насосом продолжается, и скважина автоматически выходит на стационарный режим работы со стабилизацией динамического уровня жидкости в нефтяной скважине. Одновременно с названными выше элементами блок 2 задания частоты вращения формирует на входе пропорционально-интегрального регулятора 6 сигнал, соответствующий требуемой частоте вращения асинхронного электродвигателя погружного насоса 9. Сигнал с выхода пропорционально-интегрального регулятора 5, характеризующий фактическую частоту вращения (за вычетом падения скорости под нагрузкой), подается на вход обратной связи пропорционально-интегрального регулятора 6. Пропорционально-интегральный регулятор 6 вычисляет разность сигнала с блока 2 задания и сигнала с выхода пропорционально-интегрального регулятора 5 и в соответствии с параметрами своей настройки формирует сигнал на входе частотного преобразователя 8, который регулирует скорость вращения асинхронного электродвигателя, входящего в состав кустовой насосной станции 10. Если частота вращения погружного электроцентробежного насоса 9 не соответствует заданной величине, то давление воды, создаваемое кустовой насосной станцией и подаваемое в нагнетательную скважину, начнет изменяться. В частности при падении пластового давления давление в нагнетательной скважине начнет увеличиваться. В результате происходит стабилизация дебита нефтяной скважины при одном и том же значении динамического уровня жидкости, также стабилизируемом предлагаемой системой управления погружным электроцентробежным насосом и кустовой насосной станцией.
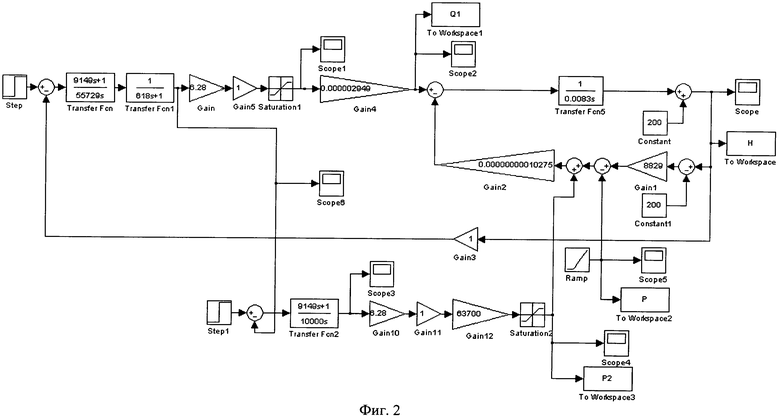
Подтверждением сказанного могут служить результаты компьютерного моделирования процессов, протекающих, например, в скважине 67 Кудиновского месторождения при оснащении ее кустовой насосной станцией. Скважина, погружной электроцентробежный насос, частотные преобразователи, кустовая насосная станция, например, обладают следующими параметрами: kсп=6,28 рад (коэффициенты передачи частотных преобразователей); kДУ=1 (коэффициент передачи асинхронных электродвигателей); kнас1=2,949·10-6 м3/рад (коэффициент передачи погружного насоса); kнас2=63700 Нс/м2 рад (коэффициент передачи насоса кустовой станции); kпр=1,0275·10-10 м3/с·Па (коэффициент продуктивности нефтяного пласта); ρ=900 кг/м3 (плотность добываемой жидкости); g=9,81 м/с2 (ускорение свободного падения); dк=0,126 м (внутренний диаметр колонны обсадных труб); dнкт=0,073 м (диаметр насосно-компрессорных труб); Sз=0,0083 м2 (площадь затрубного пространства); Hст=200 м (статический уровень жидкости в скважине. Параметры настройки апериодических фильтров 3 и 4 и пропорционально-интегральных регуляторов 5 и 6, например, выбраны следующим образом: Tф1=Tф2=618 с (постоянные времени первого и второго фильтров 3 и 4); kп1=0,164 (коэффициент передачи регулятора 5); Tи1=55729 с (постоянная времени регулятора 5); kп2=0,9149 (коэффициент передачи регулятора 6); Tи1=10000 с (постоянная времени регулятора 6). Тогда расчетная модель предлагаемой системы управления примет вид, приведенный на фиг.2. На расчетной схеме учтено ограничение скорости вращения асинхронного электродвигателя погружного насоса и давления на выходе кустовой насосной станции. Искусственно смоделировано изменение пластового давления со скоростью 20 Н/м2с через 10000 с после запуска системы. Несмотря на заданные изменения, предлагаемая система управления стабилизирует динамический уровень жидкости в скважине на значении 935 м (фиг.3). Величина 935 м является заданной блоком 1 задания. В то же время стабилизируется и дебит нефтяной скважины на уровне 6,57·10-4 м3/с (≈57 м3/сут), что соответствует заданной в блоке 1 частоте 36 Гц. В системе управления погружным электроцентробежным наосом, взятой за прототип, такого результата добиться невозможно, и при уменьшении пластового давления дебит скважины будет падать.
Таким образом, предложенная система управления погружным электроцентробежным насосом и кустовой насосной станции позволяет стабилизировать дебит нефтяной скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ И КУСТОВОЙ НАСОСНОЙ СТАНЦИЕЙ | 2015 |
|
RU2604473C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2370673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2010 |
|
RU2442024C2 |
| Управляемая система скважинной погружной электронасосной установки | 2014 |
|
RU2619003C2 |
| Система управления погружным электроцентробежным насосом | 2024 |
|
RU2825919C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2015 |
|
RU2605871C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЦЕНТРОБЕЖНЫМ НАСОСОМ | 2021 |
|
RU2770528C1 |
| УСТРОЙСТВО ДЛЯ ЭКСПЛУАТАЦИИ ПОГРУЖНОГО ЭЛЕКТРОНАСОСНОГО АГРЕГАТА В НЕФТЕГАЗОВОЙ СКВАЖИНЕ | 2004 |
|
RU2256065C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2007 |
|
RU2341004C1 |
| УНИВЕРСАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ | 2010 |
|
RU2430273C1 |
Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы, а также в процессе длительной эксплуатации скважины. Система управления (фиг.1) погружным электроцентробежным насосом и кустовой насосной станцией содержит блок 1 задания динамического уровня жидкости, блок 2 задания частоты вращения, апериодические фильтры 3 и 4, пропорционально-интегральные регуляторы 5 и 6, частотные преобразователи 7 и 8, погружной электроцентробежный насос 9, кустовую насосную станцию 10, датчик 11 динамического уровня жидкости. Предложенная система управления погружным электроцентробежным насосом и кустовой насосной станцией позволяет стабилизировать дебит нефтяной скважины. 4 ил.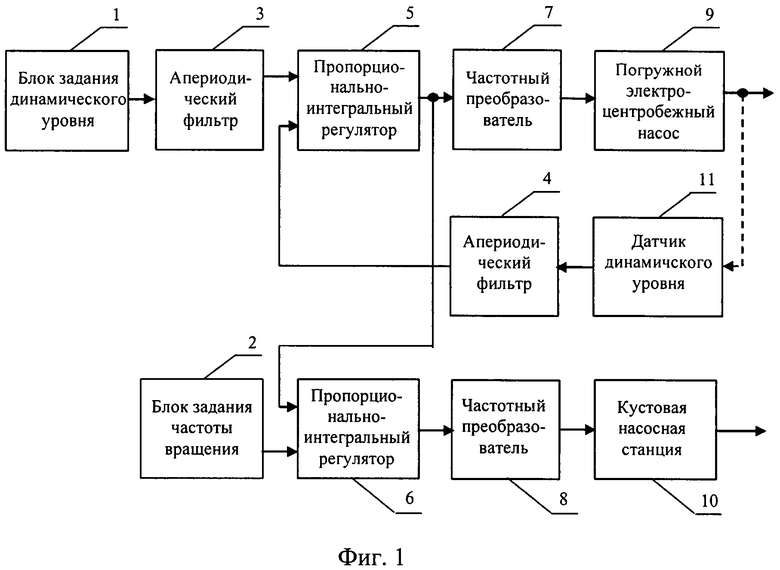
Система управления погружным электроцентробежным насосом и кустовой насосной станцией, содержащая блок задания динамического уровня жидкости, первый и второй апериодические фильтры, первый пропорционально-интегральный регулятор, первый частотный преобразователь, погружной электроцентробежный насос и датчик динамического уровня жидкости, причем выход блока задания динамического уровня жидкости соединен с входом первого апериодического фильтра, выход которого соединен с первым входом первого пропорционально-интегрального регулятора, выход первого пропорционально-интегрального регулятора соединен с входом первого частотного преобразователя, выход которого подключен к погружному электроцентробежному насосу, выход датчика динамического уровня жидкости соединен с входом второго апериодического фильтра, выход которого соединен с вторым входом первого пропорционально-интегрального регулятора, отличающаяся тем, что в нее дополнительно введены блок задания частоты вращения, второй пропорционально-интегральный регулятор, второй частотный преобразователь и кустовая насосная станция, причем выход блока задания частоты вращения соединен с первым входом второго пропорционально-интегрального регулятора, выход которого соединен с входом второго частотного преобразователя, выход первого пропорционально-интегрального регулятора соединен с вторым входом второго пропорционально интегрального регулятора, а к выходу второго частотного преобразователя подключена кустовая насосная станция.
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2370673C1 |
| СПОСОБ ВЫВОДА СКВАЖИНЫ, ОБОРУДОВАННОЙ УСТАНОВКОЙ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ, НА СТАЦИОНАРНЫЙ РЕЖИМ РАБОТЫ | 2000 |
|
RU2181829C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПОГРУЖНЫХ ЦЕНТРОБЕЖНЫХ НАСОСНЫХ АГРЕГАТОВ В ГРУППЕ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2050472C1 |
| Способ регулирования динамического уровня жидкости в скважине | 1990 |
|
SU1809006A1 |
| US 0006798338 В1, 28.09.2004 | |||
| US 20010032721 А1, 25.10.2001. | |||

