Область техники, к которой относится изобретение
Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы, а также для стабилизации динамического уровня жидкости в процессе длительной эксплуатации скважины.
Уровень техники
Наиболее близкой по технической сущности является система управления электроцентробежным насосом, (см. патент Российской Федерации № 2370673, опубл. 20.10.2009, Бюл. № 29), содержащая блок задания динамического уровня жидкости, два апериодических фильтра, пропорционально-интегральный регулятор, частотный преобразователь, погружной электроцентробежный насос и датчик динамического уровня жидкости.
Недостатком наиболее близкой системы управления погружным электроцентробежным насосом является то, что для вывод нефтяной скважины на стационарный режим работы и стабилизации динамического уровня жидкости в скважине в ней необходимо использовать дорогостоящий датчик динамического уровня, например, эхолот, устанавливаемый на устье скважины, или датчик давления на приеме насоса.
Раскрытие сущности изобретения
Технический результат изобретения – обеспечение вывода нефтяной скважины на стационарный режим работы и стабилизации динамического уровня жидкости в скважине без использования датчика динамического уровня, что значительно упрощает комплектацию погружного или наземного оборудования нефтяной скважины.
Технический результат достигается тем, что в систему управления погружным электроцентробежным насосом, содержащую блок задания динамического уровня жидкости, регулятор динамического уровня, преобразователь частоты, повышающий трансформатор, погружной электроцентробежный насос, датчик тока, датчик напряжения, первый и второй аналого-цифровой преобразователи, причем выход блока задания динамического уровня жидкости соединен с первым входом регулятора динамического уровня, выход которого соединен входом преобразователя частоты, первый выход преобразователя частоты соединен с повышающим трансформатором, выход которого подключен к погружному электроцентробежному насосу, к первому выходу преобразователя частоты подключены датчики тока и напряжения, выход датчика тока соединен с входом первого аналого-цифрового преобразователя, выход датчика напряжения соединен с входом второго аналого-цифрового преобразователя, дополнительно введен блок вычисления динамического уровня жидкости, причем второй выход преобразователя частоты соединен с первым входом блока вычисления динамического уровня жидкости, выход первого аналого-цифрового преобразователя соединен с вторым входом блока вычисления динамического уровня жидкости, выход второго аналого-цифрового преобразователя соединен с третьим входом блока вычисления динамического уровня жидкости, выход которого соединен с вторым входом регулятора динамического уровня.
Существенные отличия находят свое выражение в новой совокупности связей между блоками устройства. Указанная совокупность связей позволяет производить вывод нефтяной скважины на стационарный режим работы и стабилизировать динамический уровень жидкости в скважине без использования датчика динамического уровня.
Краткое описание чертежей
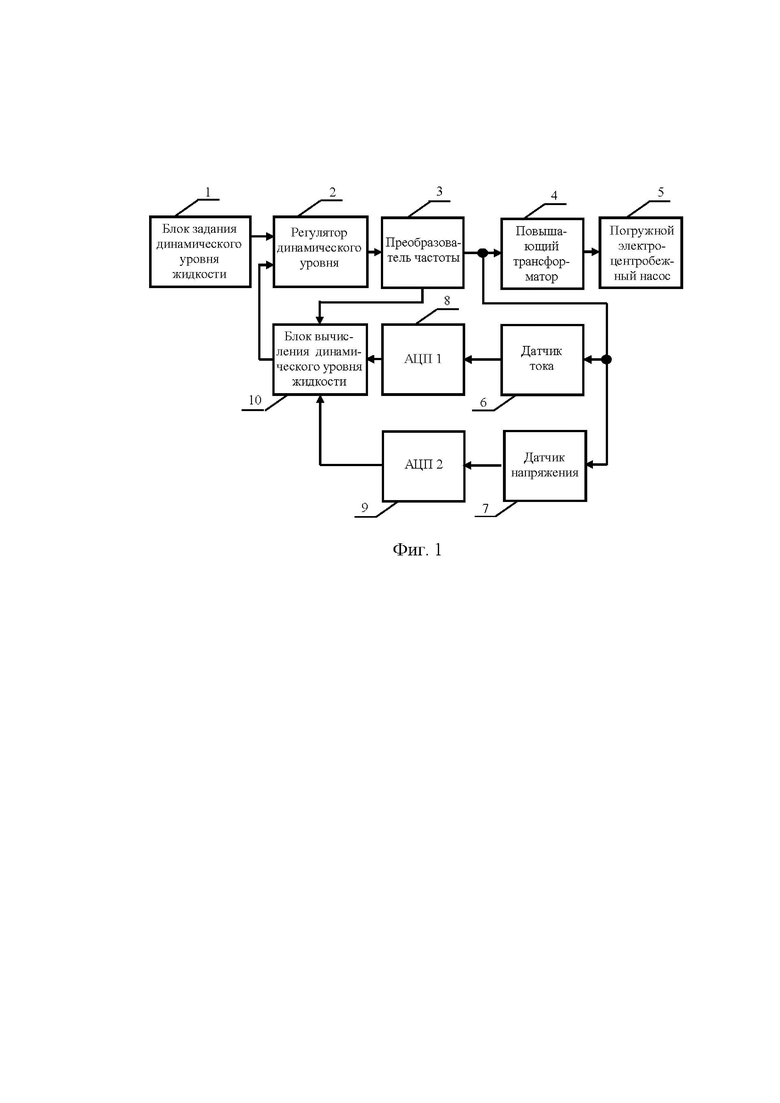
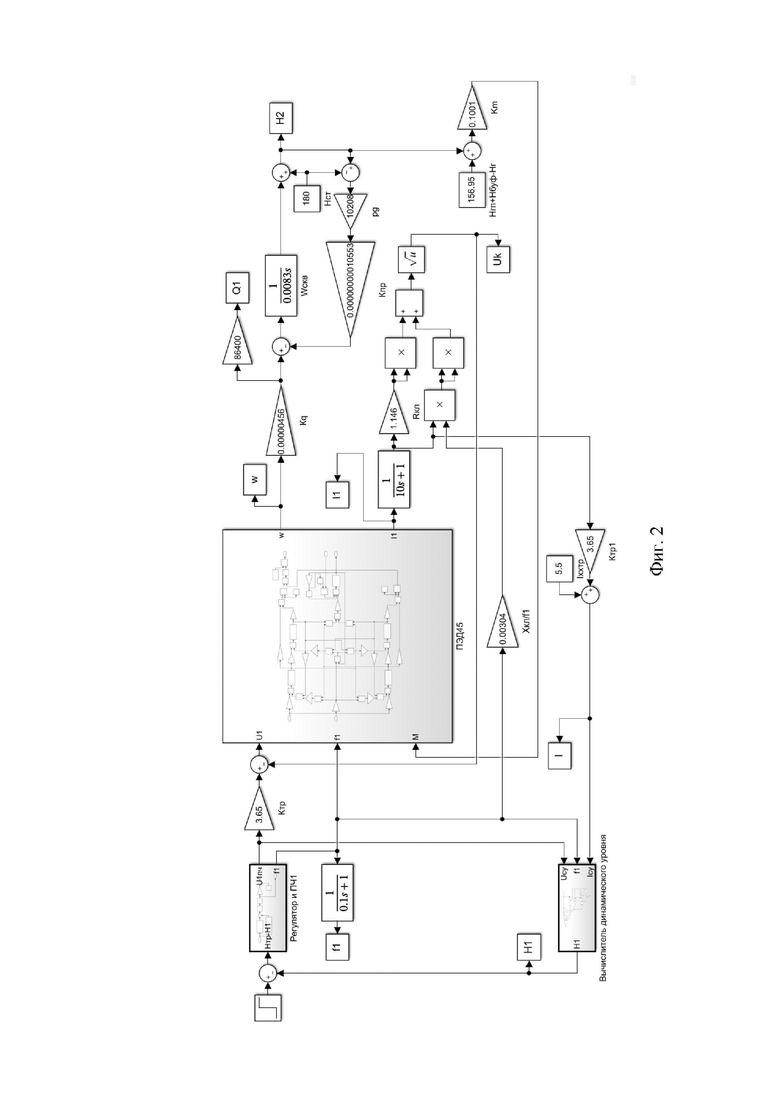
На фиг. 1 представлена функциональная схема системы управления погружным электроцентробежным насосом; на фиг. 2 изображена расчетная модель системы управления погружным электроцентробежным насосом; на фиг. 3 приведена расчетная модель регулятора динамического уровня и преобразователя частоты; на фиг. 4 изображена расчетная модель блока вычисления динамического уровня жидкости; на фиг. 5 приведена расчетная модель погружного асинхронного двигателя; на фиг. 6 приведен график изменения динамического уровня жидкости в скважине при работе предлагаемой системы управления.
Система управления (фиг. 1) погружным электроцентробежным насосом содержит блок задания динамического уровня жидкости 1, регулятор динамического уровня 2, преобразователь частоты 3, повышающий трансформатор 4, погружной электроцентробежный насос 5, датчик тока 6, датчик напряжения 7, первый аналого-цифровой преобразователь 8, второй аналого-цифровой преобразователь 9, блок вычисления динамического уровня жидкости 10.
Выход блока задания динамического уровня жидкости 1 соединен с первым входом регулятора динамического уровня 2, выход которого соединен входом преобразователя частоты 3. Первый выход преобразователя частоты 3 соединен с повышающим трансформатором 4, выход которого подключен к погружному электроцентробежному насосу 5. К первому выходу преобразователя частоты 3 подключены датчик 6 тока и датчик напряжения 7. Выход датчика тока 6 соединен с входом первого аналого-цифрового преобразователя 8. Выход датчика напряжения 7 соединен с входом второго аналого-цифрового преобразователя 9. Второй выход преобразователя частоты 3 соединен с первым входом блока вычисления динамического уровня жидкости 10. Выход первого аналого-цифрового преобразователя 8 соединен с вторым входом блока вычисления динамического уровня жидкости 10. Выход второго аналого-цифрового преобразователя 9 соединен с третьим входом блока вычисления динамического уровня жидкости 10, выход которого соединен с вторым входом регулятора динамического уровня 2.
Блок задания динамического уровня жидкости 1, регулятор динамического уровня 2 (например, пропорционально-интегральный), аналого-цифровые преобразователи 8 и 9 и блок вычисления динамического уровня жидкости 10 могут быть реализованы, например, на программируемом логическом контроллере, например, S7-300. В качестве преобразователя частоты 3 может быть использован, например, преобразователь MICROMASTER 440. В качестве повышающего трансформатора 4 может быть использован, например, трансформатор ТМПНГ-СЭЩ-100/6-12; 1.57/0.38; 3.40/0.64; Yн/Yн-0. В качестве погружного электроцентробежного насоса 5 может быть применен, например, центробежный насос 0215ЭЦНАКИ5-125И, скомплектованный с погружным электродвигателем ЭДТ45-103М1. В качестве датчика тока 6 может быть использован датчик ATE.S040.I42, а в качестве датчика 7 напряжения – датчик ТП03С-600В.
Осуществление изобретения
Система управления погружным электроцентробежным насосом работает следующим образом. После включения системы управления на выходах преобразователя частоты 3 начинают формироваться сигналы в соответствии с сигналом, поступающим с выхода блока задания динамического уровня жидкости 1 и передаточной функцией регулятора динамического уровня 2. Сигнал с первого выхода преобразователя частоты 3 представляет трехфазную систему напряжения заданной частоты и действующего напряжения. Этот сигнал, пройдя через повышающий трансформатор 4 заставляет вращаться асинхронный электродвигатель погружного электроцентробежного насоса 5. В результате этого происходит отбор жидкости из затрубного пространства скважины, и динамический уровень начинает изменяться. Одновременно с работой названных блоков и устройств сигнал с первого выхода преобразователя частоты 3 поступает на входы датчика тока 6 и датчика напряжения 7, которые измеряют, соответственно, фазный ток  и фазное напряжение
и фазное напряжение  , подаваемые на вход повышающего трансформатора 4. Кроме того, сигнал с второго выхода преобразователя частоты 3 (сигнал частоты
, подаваемые на вход повышающего трансформатора 4. Кроме того, сигнал с второго выхода преобразователя частоты 3 (сигнал частоты  формируемого напряжения) подается на первый вход блока вычисления динамического уровня жидкости 10. При этом нормализованный сигнал с датчика тока 6 подается через первый аналого-цифровой преобразователь 8 на второй вход блока вычисления динамического уровня жидкости 10, а нормализованный сигнал с датчика напряжения 7 подается через второй аналого-цифровой преобразователь 9 на третий вход блока вычисления динамического уровня жидкости 10. Блок вычисления динамического уровня жидкости 10 по сигналам , и вычисляет динамический уровень жидкости в скважине, например, по формуле
формируемого напряжения) подается на первый вход блока вычисления динамического уровня жидкости 10. При этом нормализованный сигнал с датчика тока 6 подается через первый аналого-цифровой преобразователь 8 на второй вход блока вычисления динамического уровня жидкости 10, а нормализованный сигнал с датчика напряжения 7 подается через второй аналого-цифровой преобразователь 9 на третий вход блока вычисления динамического уровня жидкости 10. Блок вычисления динамического уровня жидкости 10 по сигналам , и вычисляет динамический уровень жидкости в скважине, например, по формуле
 . (1)
. (1)
где  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и
и  – постоянные коэффициенты, определяемые техническими характеристиками повышающего трансформатора, соединительного кабеля, погружного асинхронного двигателя, центробежного насоса и скважины;
– постоянные коэффициенты, определяемые техническими характеристиками повышающего трансформатора, соединительного кабеля, погружного асинхронного двигателя, центробежного насоса и скважины;
 ;
;  ;
;  ;
; ;
;
 ;
;  ;
;  ;
; ;
; ;
;
 ;
;
 – потери напора на трение в насосно-компрессорных трубах;
– потери напора на трение в насосно-компрессорных трубах;
 – буферное давление на устье скважины;
– буферное давление на устье скважины;  – плотность откачиваемой жидкости;
– плотность откачиваемой жидкости;  – ускорение свободного падения;
– ускорение свободного падения;  – напор, создаваемый растворенным в жидкости газом;
– напор, создаваемый растворенным в жидкости газом;  – коэффициент полезного действия насоса.
– коэффициент полезного действия насоса.  –производительность насоса в м3/сутки при работе на номинальной скорости
–производительность насоса в м3/сутки при работе на номинальной скорости  ;
;  и
и  – коэффициент полезного действия и коэффициент мощности погружного асинхронного двигателя;
– коэффициент полезного действия и коэффициент мощности погружного асинхронного двигателя;  и
и  – номинальные момент и скорость вращения двигателя;
– номинальные момент и скорость вращения двигателя;  – скорость идеального холостого хода при частоте питающего напряжения 50 Гц;
– скорость идеального холостого хода при частоте питающего напряжения 50 Гц;  – число пар полюсов двигателя;
– число пар полюсов двигателя;  и
и  – активное сопротивление и индуктивность соединительного кабеля;
– активное сопротивление и индуктивность соединительного кабеля; и
и  – ток холостого хода и коэффициент трансформации повышающего трансформатора.
– ток холостого хода и коэффициент трансформации повышающего трансформатора.
Сигнал с выхода блока вычисления динамического уровня жидкости 10, вычисленный по формуле (1), подается на второй вход (вход обратной связи) регулятора динамического уровня 2. Регулятор динамического уровня 2 вычисляет разность между сигналами, поданными на его первый и второй входы, и в соответствии с параметрами своей передаточной функции опять же формирует сигнал управления преобразователю частоты 3. Далее работа системы управления погружным электроцентробежным насосом продолжается, и скважина автоматически выходит на стационарный режим работы со стабилизацией динамического уровня жидкости в нефтяной скважине.
Подтверждением сказанного могут служить результаты компьютерного моделирования процессов, протекающих в скважине, обладающей, например, следующими параметрами: м3/рад;
м3/рад; кг/м3; внутренний диаметр колонны обсадных труб
кг/м3; внутренний диаметр колонны обсадных труб м; диаметр насосно-компрессорных труб
м; диаметр насосно-компрессорных труб м; площадь затрубного пространства
м; площадь затрубного пространства м2; статический уровень жидкости в скважине
м2; статический уровень жидкости в скважине м; коэффициент продуктивности нефтяного пласта
м; коэффициент продуктивности нефтяного пласта м3/с⋅Па. Скважина оснащена, например, погружным центробежным насосом 0215ЭЦНАКИ5-125И с коэффициентом м3/рад и коэффициентом полезного действия
м3/с⋅Па. Скважина оснащена, например, погружным центробежным насосом 0215ЭЦНАКИ5-125И с коэффициентом м3/рад и коэффициентом полезного действия  . Насос приводится в действие погружным асинхронным двигателем, например, ЭДТ45-103М1 со следующими техническими параметрами:
. Насос приводится в действие погружным асинхронным двигателем, например, ЭДТ45-103М1 со следующими техническими параметрами:  Нм,
Нм,  рад/с,
рад/с,  рад/с, номинальным напряжением 1400 В.Электродвигатель имеет следующие параметры схемы замещения:
рад/с, номинальным напряжением 1400 В.Электродвигатель имеет следующие параметры схемы замещения:  Ом,
Ом,  Ом,
Ом,  Гн,
Гн,  Гн,
Гн,  Гн. Для согласования выходного напряжения преобразователя частоты с напряжением ПЭД используется повышающий трансформатор, например, ТМПНГ-СЭЩ-100/6-12; 1.57/0.38; 3.40/0.64; Yн/Yн-0 с коэффициентом трансформации
Гн. Для согласования выходного напряжения преобразователя частоты с напряжением ПЭД используется повышающий трансформатор, например, ТМПНГ-СЭЩ-100/6-12; 1.57/0.38; 3.40/0.64; Yн/Yн-0 с коэффициентом трансформации  и током холостого хода
и током холостого хода  А. Соединительный кабель обладает, например, активным сопротивлением
А. Соединительный кабель обладает, например, активным сопротивлением  Ом и индуктивностью
Ом и индуктивностью Гн. Тогда расчетная модель предлагаемой системы управления примет вид, приведенный на фиг. 2. На расчетной модели регулятор динамического уровня 2 и преобразователь частоты 3 представлены следующей композицией блоков (фиг. 3). Они учитывают, что настройка пропорционально-интегрального регулятора динамического уровня 2, например, выбрана следующим образом: коэффициент передачи регулятора
Гн. Тогда расчетная модель предлагаемой системы управления примет вид, приведенный на фиг. 2. На расчетной модели регулятор динамического уровня 2 и преобразователь частоты 3 представлены следующей композицией блоков (фиг. 3). Они учитывают, что настройка пропорционально-интегрального регулятора динамического уровня 2, например, выбрана следующим образом: коэффициент передачи регулятора  ; постоянная времени регулятора
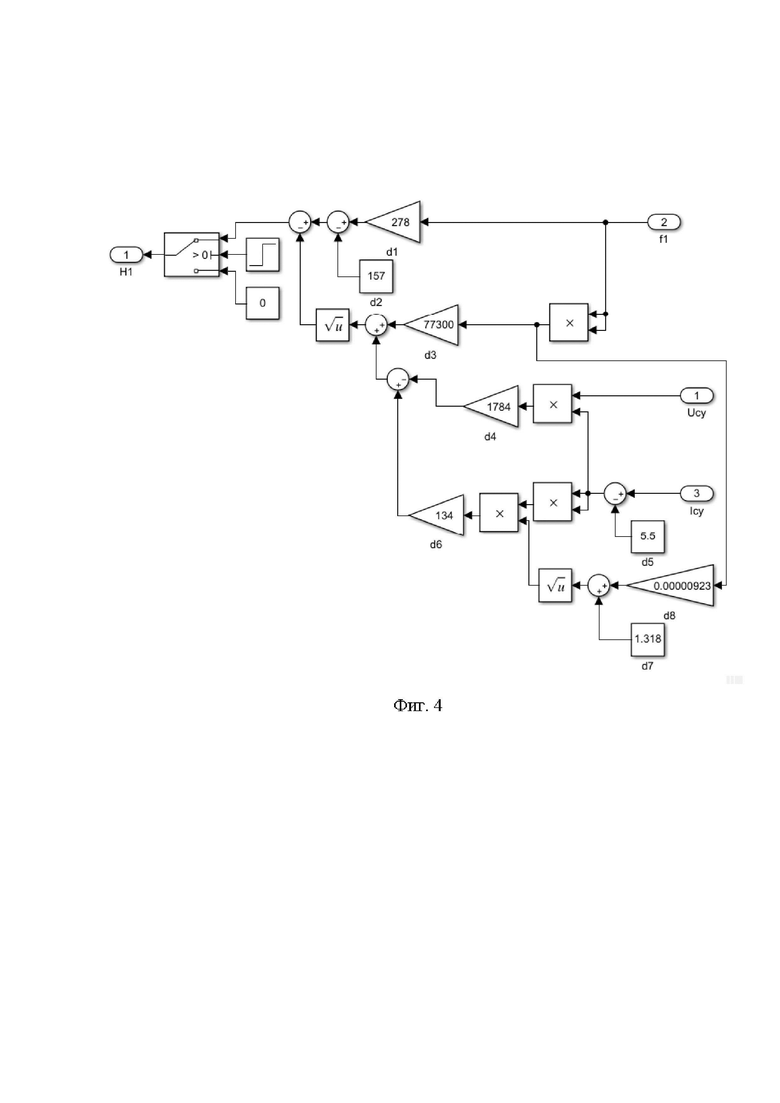
; постоянная времени регулятора  с, причем регулятор имеет цифровую техническую реализацию с периодом дискретизации 600 с. Блок вычисления динамического уровня жидкости 10 представлен следующей композицией блоков (фиг. 4). Они учитывают, что для рассматриваемой нефтяной скважины коэффициенты, входящие в формулу (1) равны:
с, причем регулятор имеет цифровую техническую реализацию с периодом дискретизации 600 с. Блок вычисления динамического уровня жидкости 10 представлен следующей композицией блоков (фиг. 4). Они учитывают, что для рассматриваемой нефтяной скважины коэффициенты, входящие в формулу (1) равны:  м/Гц;
м/Гц;  м;
м;  м2/Гц2;
м2/Гц2; м2/ВА;
м2/ВА;  А;
А;  м2/ВА;
м2/ВА;  Ом2;
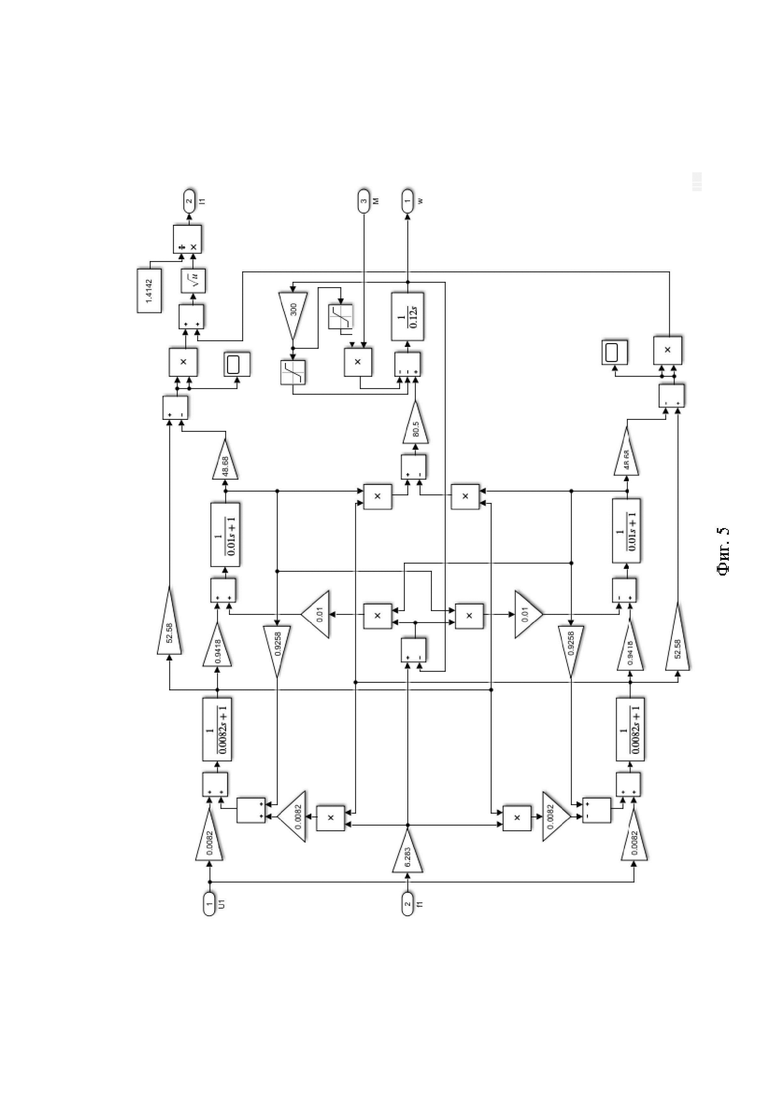
Ом2; Ом2/Гц2. Расчетная модель, приведенная на фиг. 2, содержит также модель погружного асинхронного двигателя (фиг. 5), которая отражает следующие уравнения
Ом2/Гц2. Расчетная модель, приведенная на фиг. 2, содержит также модель погружного асинхронного двигателя (фиг. 5), которая отражает следующие уравнения
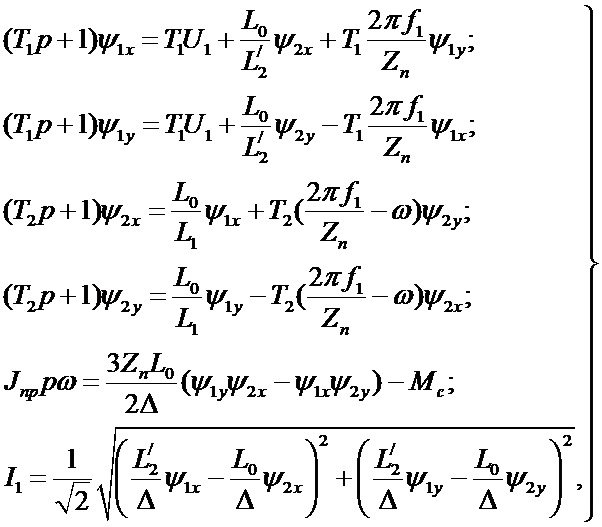 (2)
(2)
где  – действующее значение фазного напряжения статора асинхронного двигателя;
– действующее значение фазного напряжения статора асинхронного двигателя;  ,
,  – электромагнитные постоянные времени цепей статора и ротора;
– электромагнитные постоянные времени цепей статора и ротора;  ;
;  – приведенный момент инерции ротора;
– приведенный момент инерции ротора; – момент нагрузки;
– момент нагрузки; – оператор дифференцирования.
– оператор дифференцирования.
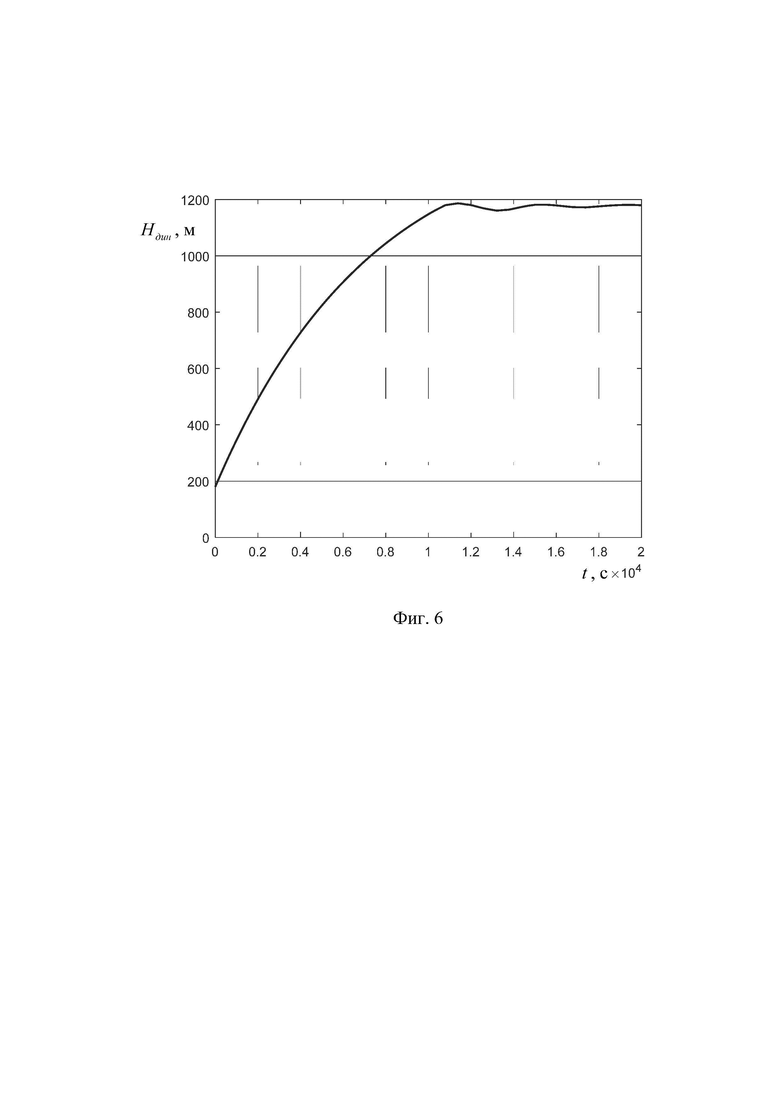
Система уравнений (2) позволяет определить действующее значение тока статора асинхронного двигателя при известных значениях частоты, действующего значения фазного напряжения и момента нагрузки . Результаты моделирования (фиг. 6) показывают, что с помощью предлагаемой системы управления погружным электроцентробежным насосом скважина выходит на заданный динамический уровень жидкости 1200 м с малой погрешностью в 20 м.
Таким образом, предложенная система управления погружным электроцентробежным насосом позволяет производить вывод нефтяной скважины на стационарный режим работы и стабилизировать динамический уровня жидкости в скважине без использования датчика динамического уровня, что значительно упрощает комплектацию погружного или наземного оборудования нефтяной скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ И КУСТОВОЙ НАСОСНОЙ СТАНЦИЕЙ | 2012 |
|
RU2501980C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ И КУСТОВОЙ НАСОСНОЙ СТАНЦИЕЙ | 2015 |
|
RU2604473C1 |
| Управляемая система скважинной погружной электронасосной установки | 2014 |
|
RU2619003C2 |
| СПОСОБ ОТКАЧКИ НЕФТИ ИЗ СКВАЖИН С БОЛЬШИМ ГАЗОСОДЕРЖАНИЕМ И ЭЛЕКТРОПОГРУЖНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2380521C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2015 |
|
RU2605871C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОБЫЧЕЙ УГЛЕВОДОРОДНОГО СЫРЬЯ | 2011 |
|
RU2487994C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2370673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2010 |
|
RU2442024C2 |
| СКВАЖИННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И КОНТРОЛЯ ДАВЛЕНИЯ НА ПРИЕМЕ ПОГРУЖНОГО НАСОСА | 2005 |
|
RU2301888C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СКВАЖИНЫ С ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ НАСОСОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2165037C2 |
Изобретение относится к системам управления добычей нефти и может использоваться для вывода скважин, оборудованных установкой электроцентробежного насоса, на стационарный режим работы, а также для стабилизации динамического уровня жидкости в процессе длительной эксплуатации скважины. Техническим результатом является обеспечение вывода нефтяной скважины на стационарный режим работы и стабилизации динамического уровня жидкости в скважине без использования датчика динамического уровня, что значительно упрощает комплектацию погружного или наземного оборудования нефтяной скважины. Система управления погружным электроцентробежным насосом содержит блок 1 задания динамического уровня жидкости, регулятор 2 динамического уровня, преобразователь 3 частоты, повышающий трансформатор 4, погружной электроцентробежный насос 5, датчик 6 тока, датчик 7 напряжения, аналого-цифровые преобразователи 8 и 9, блок 10 вычисления динамического уровня. Предложенная система управления погружным электроцентробежным насосом позволяет производить вывод нефтяной скважины на стационарный режим работы и стабилизировать динамический уровня жидкости в скважине без использования датчика динамического уровня, что значительно упрощает комплектацию погружного или наземного оборудования нефтяной скважины. 6 ил.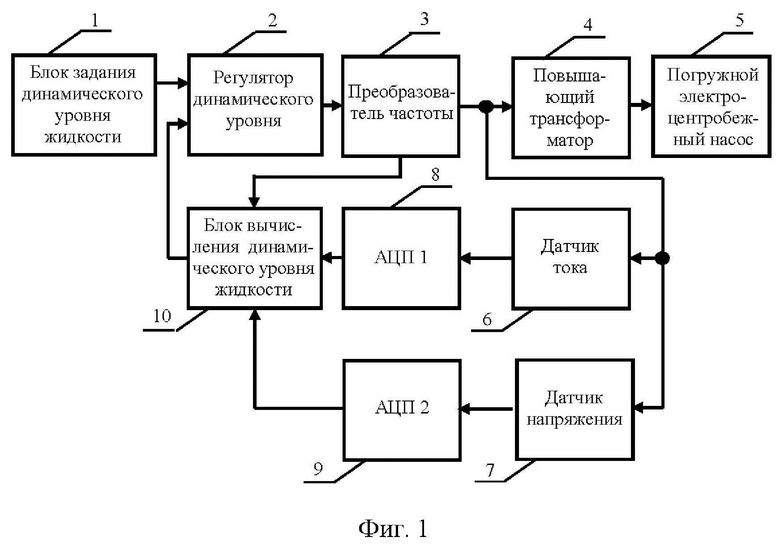
Система управления погружным электроцентробежным насосом, содержащая блок задания динамического уровня жидкости, регулятор динамического уровня, преобразователь частоты, повышающий трансформатор, погружной электроцентробежный насос, датчик тока, датчик напряжения, первый и второй аналого-цифровой преобразователи, причем выход блока задания динамического уровня жидкости соединен с первым входом регулятора динамического уровня, выход которого соединен входом преобразователя частоты, первый выход преобразователя частоты соединен с повышающим трансформатором, выход которого подключен к погружному электроцентробежному насосу, к первому выходу преобразователя частоты подключены датчики тока и напряжения, выход датчика тока соединен с входом первого аналого-цифрового преобразователя, выход датчика напряжения соединен с входом второго аналого-цифрового преобразователя, отличающаяся тем, что в нее дополнительно введен блок вычисления динамического уровня жидкости, причем второй выход преобразователя частоты соединен с первым входом блока вычисления динамического уровня жидкости, выход первого аналого-цифрового преобразователя соединен со вторым входом блока вычисления динамического уровня жидкости, выход второго аналого-цифрового преобразователя соединен с третьим входом блока вычисления динамического уровня жидкости, выход которого соединен со вторым входом регулятора динамического уровня.
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2370673C1 |
| СПОСОБ ВЫВОДА СКВАЖИНЫ, ОБОРУДОВАННОЙ УСТАНОВКОЙ ЭЛЕКТРОЦЕНТРОБЕЖНОГО НАСОСА С ЧАСТОТНО-РЕГУЛИРУЕМЫМ ПРИВОДОМ, НА СТАЦИОНАРНЫЙ РЕЖИМ РАБОТЫ | 2000 |
|
RU2181829C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ПОГРУЖНЫХ ЦЕНТРОБЕЖНЫХ НАСОСНЫХ АГРЕГАТОВ В ГРУППЕ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2050472C1 |
| US 6798338 B1, 28.09.2004 | |||
| Система стабилизации динамического уровня жидкости в скважине, оборудованной электроцентробежным насосом | 2022 |
|
RU2800636C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2007 |
|
RU2341004C1 |

