Настоящее изобретение отходит от технологии изготовления герметичных контейнеров, раскрытой в документе WO 00/073760 или патентах США 6557395, 6439032 или 6840087 (все принадлежат заявителю настоящего изобретения).
Таким образом, для изготовления герметичных контейнеров, которые имеют первую гибкую зону стенки и вторую гибкую зону стенки с разными характеристиками гибкости, настоящее изобретение представляет собой способ изготовления, в котором после выполнения закрытого контейнера, по меньшей мере один смещающий элемент перемещают к одной из первой и второй гибких зон стенки контейнера и на нее. Подобное вызывающее смещение перемещение прекращают. Осуществляют отслеживание смещающей силы, действующей на контейнер, и осуществляют выборку значения отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени. Осуществляют дополнительную выборку значения указанной отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы. Разностный сигнал формируется в зависимости от первого и второго измерительных сигналов силы. Указанный контейнер считают герметичным, если разностный сигнал удовлетворяет критерию для испытания. Тем самым, смещающий элемент перемещают к первой гибкой зоне стенки и на первую гибкую зону стенки контейнера и отслеживание смещающей силы осуществляют у второй гибкой зоны. Выборка значения отслеживаемой смещающей силы, которая в результате дает указанный первый измерительный сигнал силы, включает в себя определение максимальной величины сигнала, характеризующего силу, которая имела место в течение промежутка времени, прошедшего до первого момента времени и включающего в себя первый момент времени.
В одном варианте осуществления указанного способа смещающий элемент перемещают до заданного положения относительно контейнера, которое в одном варианте осуществления определяется механическим упором. Кроме того, в одном варианте осуществления прекращение перемещения смещающего элемента выполняют по меньшей мере по существу в первый момент времени, таким образом, по меньшей мере по существу в тот момент, в который выборка значения отслеживаемой смещающей силы приводит к первому измерительному сигналу силы.
В одном варианте осуществления выбирают заданный промежуток времени и определяют максимальную величину силы, которая имела место в течение данного заданного промежутка времени, прошедшего до первого момента времени и включающего в себя первый момент времени.
В одном варианте осуществления смещение включает в себя перемещение по меньшей мере двух смещающих элементов к первой гибкой зоне стенки и на первую гибкую зону стенки с противоположных сторон контейнера.
В одном варианте осуществления первая гибкая зона стенки контейнера представляет собой зону стенки корпуса контейнера, и вторая гибкая зона стенки представляет собой герметизирующий элемент, закрывающий отверстие корпуса контейнера.
Тем самым, в одном варианте осуществления вторая гибкая зона представляет собой подобный фольге герметизирующий элемент, закрывающий указанное отверстие.
В дополнительном варианте осуществления отслеживание смещающей силы у второй гибкой зоны стенки выполняют вдоль поверхности измерения силы, которая расположена на расстоянии заданной величины от второй гибкой зоны, при этом указанная вторая гибкая зона стенки рассматривается при несмещенном состоянии контейнера. Данная заданная величина существенно меньше максимального расстояния, на которое вторая гибкая зона стенки может в общей сложности выгибаться наружу вследствие повышенного давления в закрытом контейнере.
В одном варианте осуществления отслеживание смещающей силы включает в себя отслеживание посредством тензорезистора.
В дополнительном варианте осуществления указанного способа отслеживаемую смещающую силу сравнивают в третий момент времени, предшествующий указанному первому моменту времени, с пороговой величиной и определяют контейнер как имеющий большую утечку, если отслеживаемая сила не достигает по меньшей мере пороговой величины.
В дополнительном варианте осуществления способа изготовления выполняют множество контейнеров, перемещающихся на конвейере, и выполняют перемещение смещающих элементов, прекращение перемещения, отслеживание смещающей силы, осуществляют указанную выборку значения, формируют разностный сигнал и дополнительно выполняют указанную оценку негерметичности/герметичности на более чем одном из перемещаемых контейнеров на конвейере, по меньшей мере в основном одновременно.
В дополнительном варианте осуществления отслеживаемую силу сравнивают в третий момент времени, предшествующий первому моменту времени, с пороговой величиной и контейнер оценивают как не имеющий большой утечки, если отслеживаемая сила в третий момент времени по меньшей мере достигает пороговой величины. Отслеживаемую величину силы в указанный третий момент времени, если пороговая величина по меньшей мере достигнута, усредняют вместе с подобными значениями силы, созданными у ранее подвергнутых испытанию контейнеров, которые были оценены как не имеющие большой утечки, и пороговую величину используют в зависимости от результата подобного усреднения.
В дополнительном варианте осуществления разностный сигнал сравнивают с указывающей на малую утечку пороговой величиной.
Еще в одном дополнительном варианте осуществления разностный сигнал усредняют вместе с такими разностными сигналами, которые были сформированы во время предшествующего испытания контейнеров, которые были определены как герметичные, при этом указывающую на малую утечку пороговую величину регулируют в зависимости от результата подобного усреднения.
В еще одном дополнительном варианте осуществления предусмотрена по меньшей мере одна пороговая величина силы, и отслеживаемую силу сравнивают с подобной пороговой величиной, в результате чего указанную пороговую величину корректируют в зависимости от результата сравнения.
Различные варианты осуществления, определенные выше с их определенными признаками, могут быть объединены, в результате чего будут определены дополнительные варианты осуществления способа изготовления закрытых герметичных контейнеров с соответствующим образом скомбинированными признаками.
Устройство для испытаний на герметичность в соответствии с настоящим изобретением, предназначенное для испытаний на герметичность закрытого контейнера с по меньшей мере первой и второй гибкими зонами стенки, имеющими разные характеристики гибкости, содержит смещающее устройство для сжатия контейнера, подвергаемого испытанию. Оно дополнительно содержит датчик силы, который размещается на стенке контейнера, подвергаемого испытанию, и который генерирует электрический выходной сигнал. Выход указанного датчика силы функционально соединен с блоком памяти, выход которого функционально соединен с одним входом блока сравнения, при этом второй вход блока сравнения функционально соединен с выходом датчика силы. Смещающее устройство расположено так, чтобы обеспечить смещение первой гибкой зоны контейнера, а датчик силы расположен с возможностью его взаимодействия со второй гибкой зоной контейнера.
В одном варианте осуществления устройства смещающее устройство содержит по меньшей мере два, выполненных с возможностью перемещения друг относительно друга, смещающих элемента, перемещаемых друг относительно друга в плоскости. Тем самым, датчик силы имеет поверхность измерения силы, которая обеспечивает определение сил, по существу перпендикулярных к указанной плоскости.
В дополнительном варианте осуществления устройства датчик силы содержит тензорезистор.
В еще одном дополнительном варианте осуществления смещающее устройство взаимодействует с механическим упором, ограничивающим его смещающее воздействие на контейнер.
В еще одном дополнительном варианте осуществления устройства выход датчика силы функционально соединен с входом блока определения максимальной величины.
В еще одном дополнительном варианте осуществления устройства в соответствии с настоящим изобретением оно содержит конвейерное устройство для множества указанных контейнеров. Предусмотрены по меньшей мере два указанных смещающих устройства и датчика силы, перемещающихся вместе с конвейером.
Таким образом, различные варианты осуществления устройства могут быть объединены, что приводит к дополнительным вариантам осуществления подобного устройства с комбинированными признаками.
Дополнительно разработан способ изготовления герметично закрытых контейнеров с первой и второй гибкими зонами стенки, имеющими разные характеристики гибкости, в котором выполняют закрытый контейнер и по меньшей мере один смещающий элемент перемещают относительно одной из гибких зон контейнера, к ней и на нее. Указанное перемещение прекращают. Осуществляют отслеживание смещающей силы, действующей на указанный контейнер. Осуществляют выборку значения отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени. Осуществляют выборку значения отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы. Разностный сигнал формируют на основе первого и второго измерительных сигналов силы как один указывающий на утечку сигнал. Средний сигнал из разностных сигналов, сформированных во время предшествующего испытания контейнеров, корректируют в соответствии с текущим разностным сигналом, если контейнер, фактически подвергаемый испытанию, является герметичным. Тем самым, разностный сигнал сравнивают по меньшей мере с одним пороговым сигналом, при этом указанный пороговый сигнал регулируют в зависимости от указанного среднего сигнала. Затем выполняют перемещение смещающего элемента относительно первой гибкой зоны стенки, к ней и на нее, и осуществляют отслеживание смещающей силы на второй гибкой зоне стенки. Выборка значения смещающей силы, которая в результате дает первый измерительный сигнал силы, включает в себя определение максимальной величины сигнала силы, которая имела место в течение промежутка времени, прошедшего до первого момента времени и включающего в себя первый момент времени.
В соответствии с еще одним дополнительным вариантом осуществления разработан способ изготовления герметично закрытых контейнеров с первой и со второй гибкими зонами стенки, имеющими разные характеристики гибкости. Тем самым, выполняют закрытый контейнер и по меньшей мере один смещающий элемент перемещают относительно одной из указанных гибких зон стенки контейнера, к ней и на нее. Перемещение прекращают. Осуществляют отслеживание смещающей силы, действующей на контейнер. Осуществляют выборку значения отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени. Дополнительно осуществляют выборку значения отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы. Разностный сигнал формируют на основе первого и второго измерительных сигналов силы в качестве одного, указывающего на утечку сигнала. Осуществляют дополнительную выборку значения отслеживаемой смещающей силы в дополнительный момент времени, что в результате дает фактический дополнительный измерительный сигнал силы, который указывает на утечку. Средний сигнал из дополнительных измерительных сигналов силы формируют во время предшествующего испытания герметичных контейнеров и подобный усредненный сигнал корректируют в соответствии с фактическим дополнительным измерительным сигналом силы, если фактический дополнительный измерительный сигнал силы указывает на герметичный контейнер. Тем самым, разностный сигнал сравнивают с пороговой величиной, которая зависит от указанного усредненного сигнала. Контейнер, который определен как негерметичный, отбраковывают.
Тем самым, перемещение смещающего элемента выполняют относительно первой гибкой зоны стенки, к ней и на нее, и выполняют отслеживание смещающей силы на второй гибкой зоне. Выборка значения отслеживаемой смещающей силы, которая в результате дает первый измерительный сигнал силы, включает в себя определение максимальной величины сигнала силы, которая имела место в течение промежутка времени, прошедшего до первого момента времени и включающего в себя первый момент времени.
В соответствии с еще одним дополнительным вариантом осуществления разработан способ изготовления закрытых контейнеров с гибкой частью стенки, в котором выполняют закрытый контейнер и подвергают его смещающему воздействию. Отслеживают смещающую силу, действующую на контейнер, и исходя из подобной отслеживаемой силы определяют максимальную величину силы, которая имела место в течение некоторого промежутка времени. Сигнал, который зависит от указанной определенной максимальной величины силы, запоминают и сравнивают с сигналом, зависящим от отслеживаемой смещающей силы. Контейнер отбраковывают как негерметичный в зависимости от результата указанного сравнения.
Изобретение далее будет дополнительно проиллюстрировано на примерах с помощью фигур. Данные фигуры показывают:
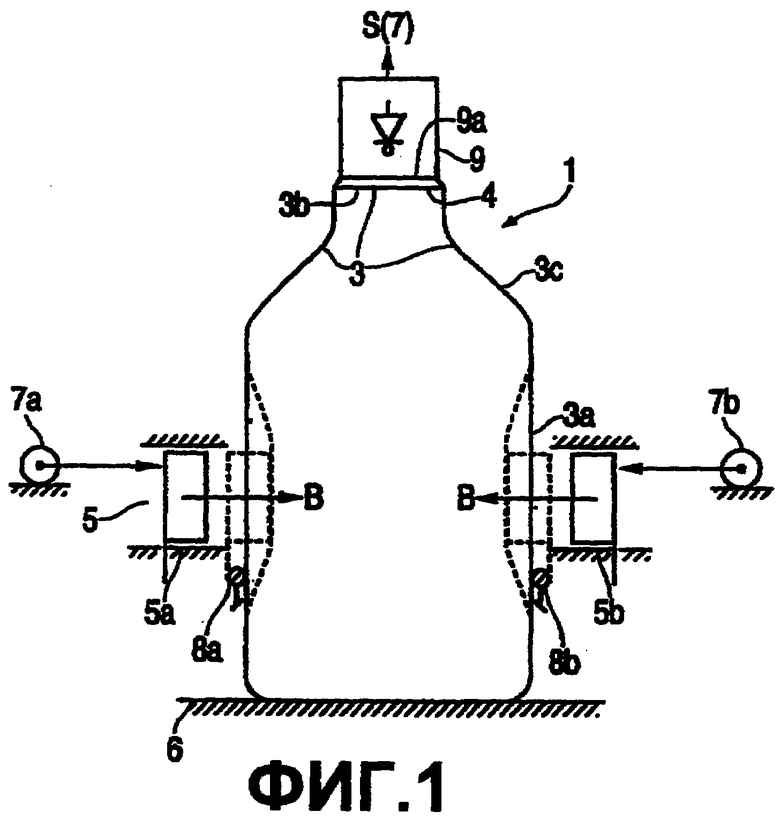
фиг.1 - в схематическом и упрощенном виде закрытый контейнер, подвергаемый испытанию на герметичность в рамках изготовления подобных контейнеров, являющихся герметичными, в соответствии с настоящим изобретением;
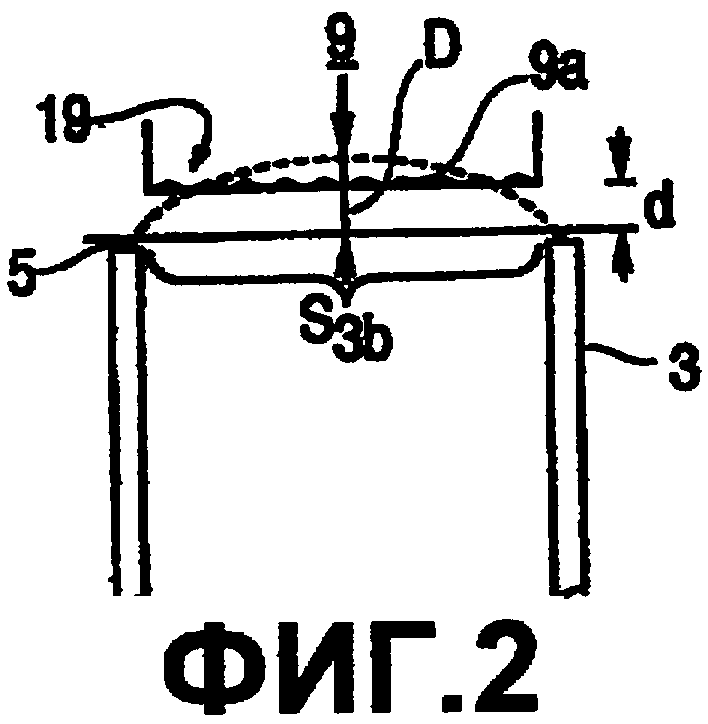
фиг.2 - увеличенную зону изображения в соответствии с фиг.1, при этом показана смещающая сила, отслеживаемая у одной из гибких зон стенки контейнера согласно фиг.1;
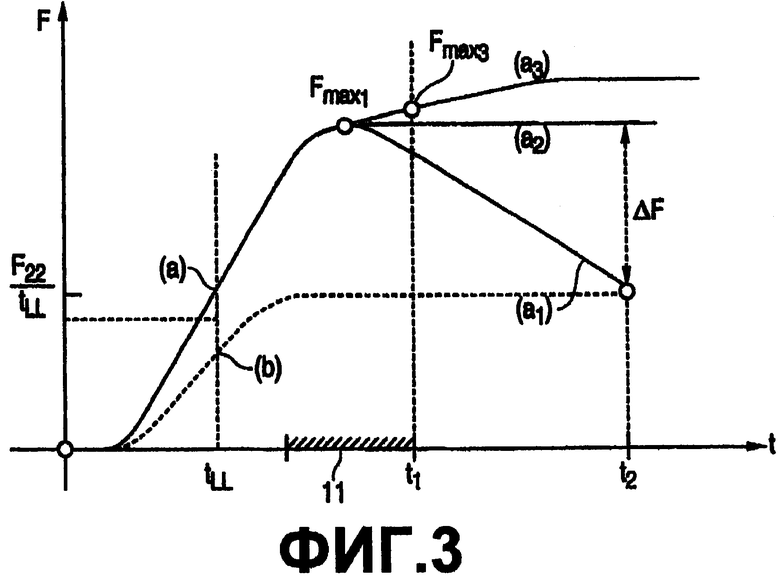
фиг.3 - качественные различные характеристики изменения силы в зависимости от времени для контейнеров, подвергаемых испытанию с помощью устройства в соответствии с настоящим изобретением и посредством методики испытаний в рамках способа изготовления в соответствии с настоящим изобретением;
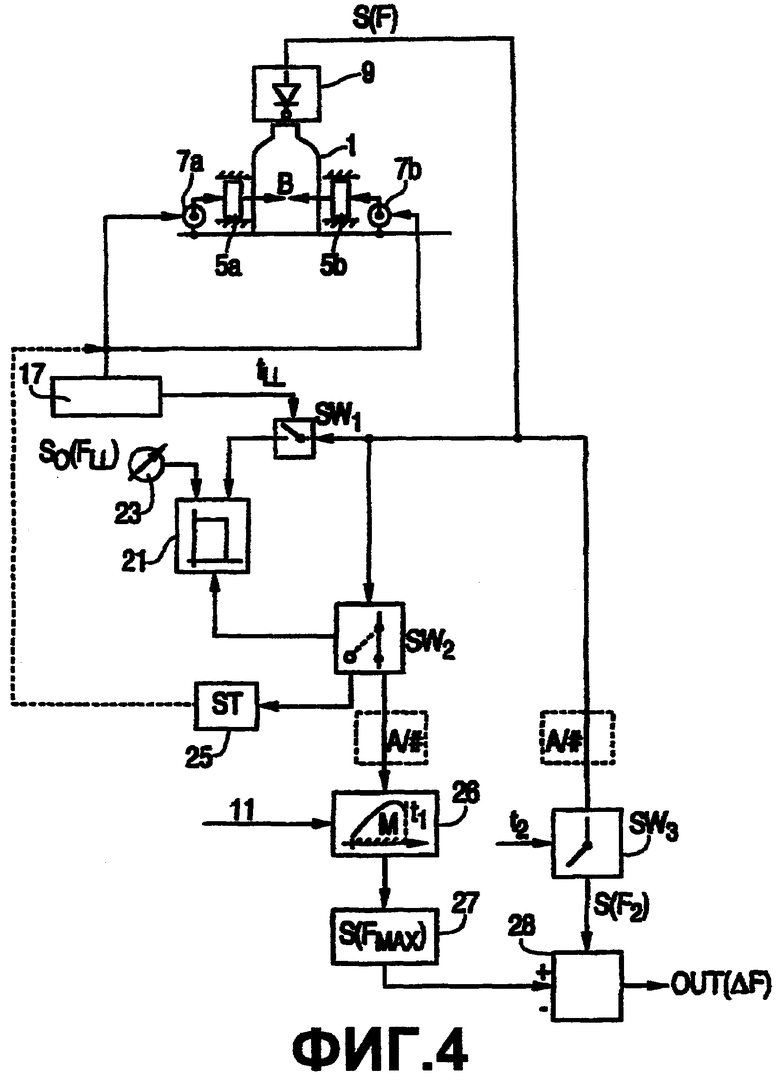
фиг.4 - упрощенную, показывающую поток сигналов/функциональную блок-схему устройства в соответствии с настоящим изобретением, работающего в соответствии с методикой испытания на герметичность в рамках способа изготовления в соответствии с настоящим изобретением;
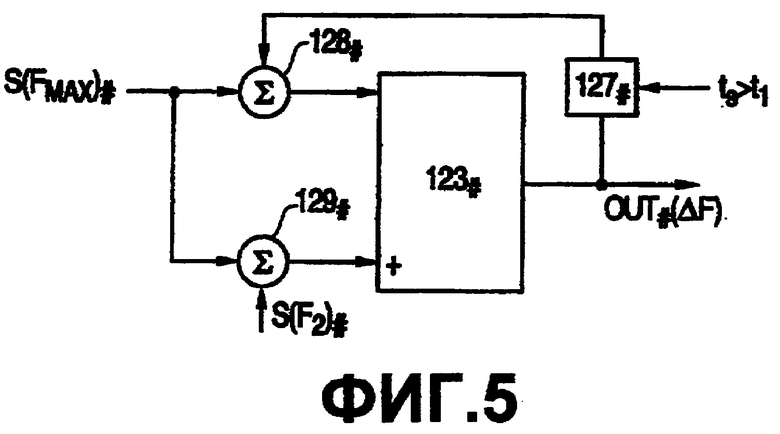
фиг.5 - вариант осуществления, предназначенный для точного выполнения сравнения цифровых сигналов, применимого в устройстве в соответствии с фиг.4;
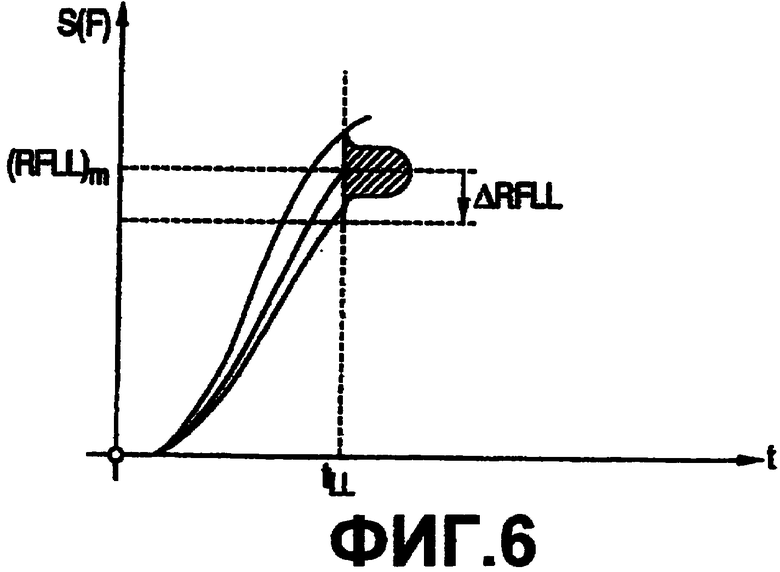
фиг.6 - разные траектории кривых, зависящих от силы сигналов с течением времени, имеющие место для одинаковых контейнеров с одинаковой степенью герметичности и обусловленные, например, производственными допусками или изменяющимися параметрами окружающей среды;
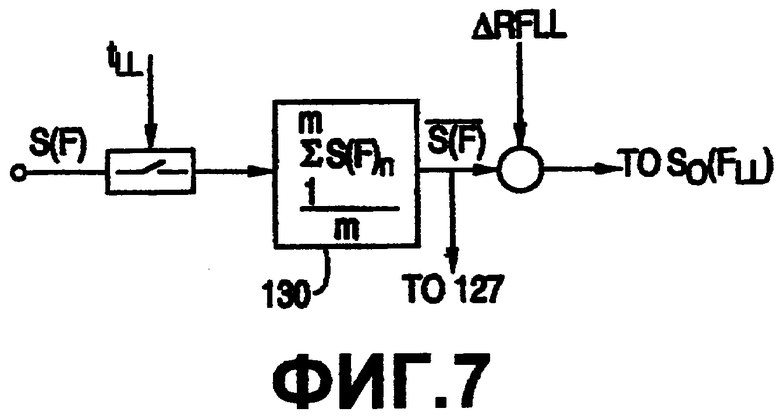
фиг.7 - вариант осуществления, предназначенный для генерирования изменяющейся во времени пороговой величины для обнаружения больших утечек;
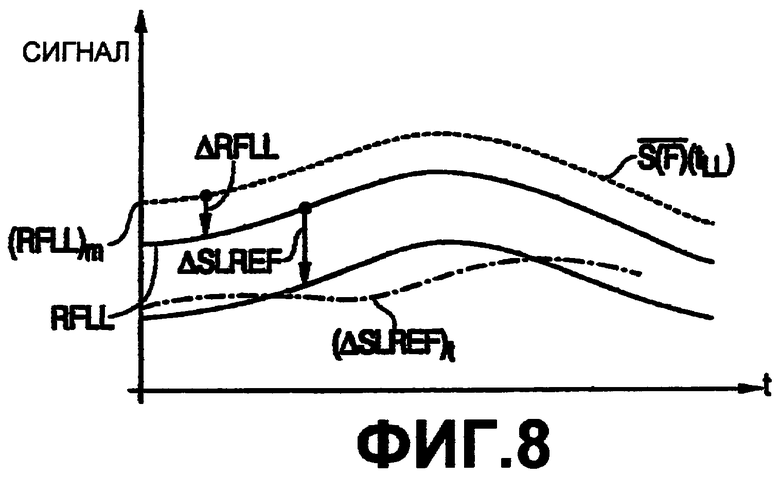
фиг.8 - качественные траектории кривых изменения времени и сигналов пороговой величины, используемых в некоторых вариантах осуществления настоящего изобретения;
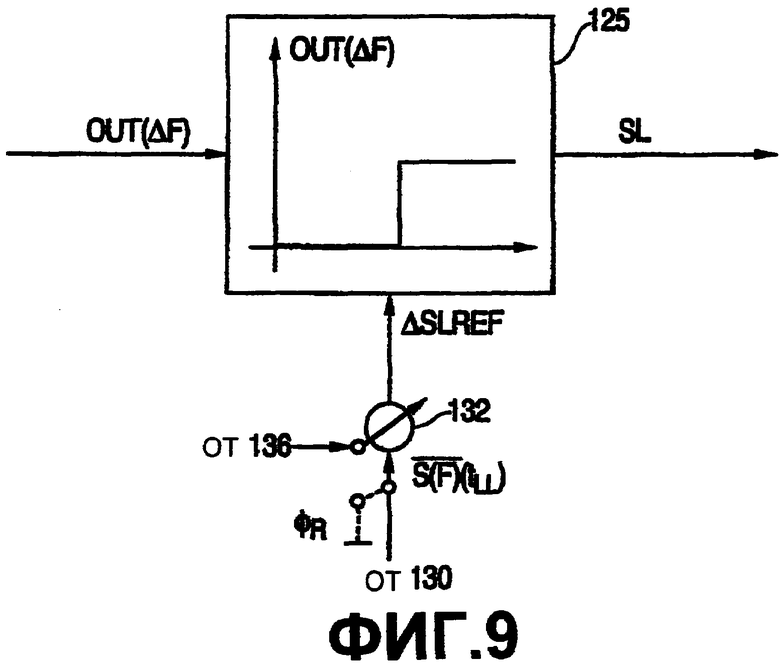
фиг.9 - оценку посредством упрощенной функциональной блок-схемы и исходя из указывающего на утечку сигнала того, имеет ли подвергаемый испытанию контейнер малую утечку или нет;
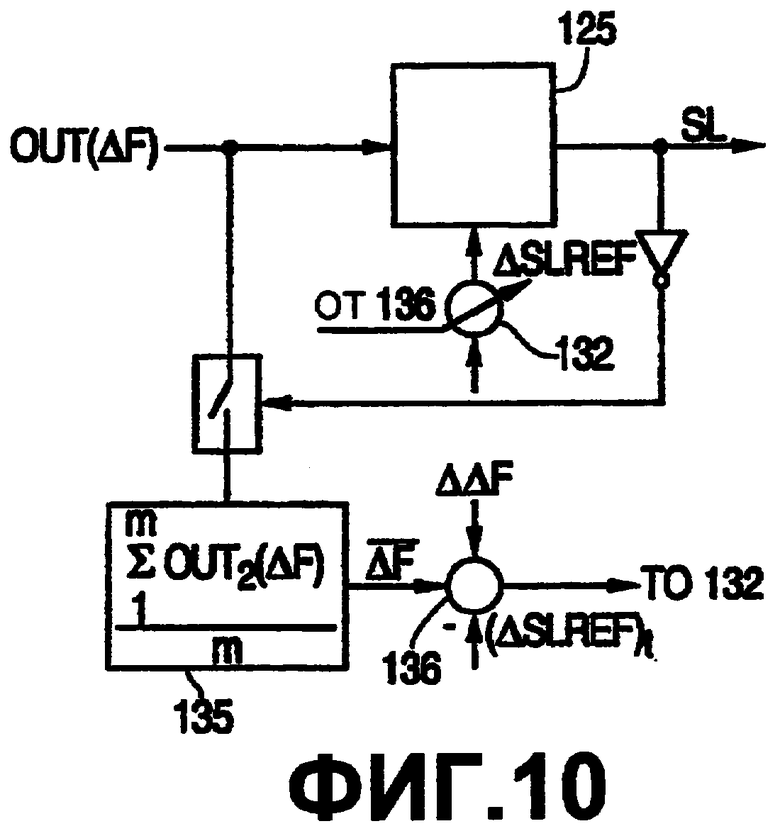
фиг.10 - генерирование для одного варианта осуществления настоящего изобретения изменяющейся во времени пороговой величины для индикации малой утечки;
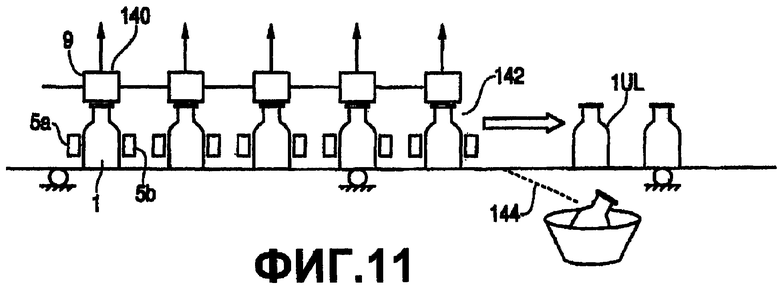
фиг.11 - на упрощенном и схематическом изображении встроенное в поточную линию устройство для испытаний на герметичность в соответствии с настоящим изобретением, предназначенное для высокоскоростного испытания контейнеров, применяемого в рамках способа изготовления в соответствии с настоящим изобретением, при этом данное устройство в конечном счете обеспечивает выбор только герметичных контейнеров из потока закрытых контейнеров.
Фиг.1 схематически показывает принцип, лежащий в основе настоящего изобретения. Закрытый контейнер 1, подлежащий испытанию на герметичность, например, в производственной поточной линии для окончательного изготовления исключительно герметичных контейнеров, имеет первую зону 3а его общей стенки 3, которая является гибкой. Отверстие 4 контейнера 1 герметично закрыто герметизирующим, подобным фольге элементом, который представляет собой вторую гибкую зону 3b стенки 3 контейнера. Зоны 3а и 3b имеют разные характеристики гибкости. Примером и наиболее распространенным вариантом контейнера 1 является бутылка, при этом стенка 3с бутылки выполнена из пластика, и отверстие в стенке герметично закрыто подобным фольге закрывающим элементом 4, который герметично присоединен к границе отверстия 4 стенки 3с бутылки, например, посредством сварки. Подобный фольге закрывающий элемент, с одной стороны, указан как гибкий, но он является по существу неэластичным, поскольку он изготовлен из фольги из металлизированного пластика или из пластифицированной металлической фольги, подобной фольге из алюминия. В противоположность данной второй гибкой зоне 3b, образованной указанным, герметизирующим, подобным фольге, закрывающим элементом, первая гибкая зона 3а стенки 3с бутылки выполнена из более толстого пластика и является более эластичной. Таким образом, указанные первая и вторая зоны 3а, 3b всей стенки 3 контейнера имеют разные характеристики гибкости.
Для проведения испытания на герметичность контейнер 1 размещают между двумя смещающими элементами 5а и 5b смещающего устройства 5. Смещающие элементы 5а и 5b перемещают друг относительно друга по направлению друг к другу и друг от друга для создания смещающей нагрузки В, действующей на первую гибкую зону 3а. Тем самым, в варианте осуществления, подобном показанному на фиг.1, оба элемента 5а и 5b перемещают одинаковым образом по направлению друг к другу и друг от друга и относительно механической базы 6 машины, например конвейера для контейнера 1. Посредством перемещения элементов 5а, 5b по направлению друг к другу, контейнер 1 сдавливают в зоне 3а с тем, чтобы он выгибался внутрь, как показано пунктирной линией. Вследствие повышенного давления внутри контейнера 1, вызванного указанным смещением, приводящим к сдавливанию, посредством смещающего устройства 5 вторая гибкая зона 3b, образованная герметизирующим, подобным фольге элементом, выгибается наружу, как также показано на фиг.1 и на увеличенном изображении на фиг.2. Таким образом, выгибающаяся наружу, вторая гибкая зона 3b прижимается к поверхности 9а измерения, имеющейся на датчике 9 силы, который неподвижен по отношению к механической базе 6 установки для испытаний. Расстояние d между второй гибкой частью 3b стенки, образованной герметизирующим, подобным фольге элементом, и поверхностью 9а измерения, имеющейся на датчике 9 измерения, выбирают таким, чтобы оно было значительно меньше максимального расстояния D, на которое подобный фольге элемент может выгибаться наружу вследствие повышенного давления внутри контейнера 1; в этой связи фиг.2 не показывает правильного соотношения величин d и D. Для круглой зоны 3b с радиусом в диапазоне 1 или 2 см расстояние d выбрано таким, что оно составляет, например, 0,5 мм. Эффект от выбора малого расстояния d таков, что выгибание второй гибкой зоны 3b наружу ограничено такой величиной, что на соединение для запечатывания или сварной шов 5 по существу не действует механическая нагрузка, обусловленная сопротивлением растяжению, вызванным выгибанием наружу.
Как дополнительно схематически показано на фиг.1, соответствующие приводы 7а и 7b вызывают перемещение смещающих элементов 5а и 5b друг относительно друга для сдавливания первой гибкой зоны 3а, и указанное перемещение ограничено соответствующими упорами 8а и 8b.
На фиг.3 показан график зависимости силы от времени, разъясняющий способ по изобретению, реализуемый устройством согласно изобретению. В нулевые (0) моменты времени в соответствии с фиг.3 начинается приводящее к смещению перемещение двух смещающих элементов 5а и 5b. Поскольку характеристика движения, то есть ускорение и, следовательно, скорость, сообщаемые приводами 7а и 7b смещающим элементам 5а и 5b, известна, промежуток времени, необходимый для перемещения смещающих элементов 5а и 5b до упоров 8а и 8b согласно фиг.1, известен и показан на фиг.3 посредством промежутка времени t1. Когда смещающие элементы 5а и 5b войдут в контакт с первой гибкой зоной 3а, то при сдавливающем смещении данной зоны 3а давление внутри контейнера 1 повышается независимо от того, заполнен ли контейнер продуктом или нет, при этом повышение давления приводит к тому, что вторая гибкая зона 3b, образованная герметизирующим, подобным фольге элементом, выгибается наружу. Как только зазор, обусловленный расстоянием d, будет перекрыт выгибающейся второй гибкой зоной 3b, и вследствие продолжающегося перемещения элементов 5а и 5b, вызывающего увеличение смещения, а также вследствие увеличивающейся поверхности контакта между поверхностью выгибающейся наружу второй зоны 3b и поверхностью 9а измерения, имеющейся на датчике 9 измерения, сила F, измеряемая посредством данного неподвижного датчика 9 силы, увеличивается. Осуществляют отслеживание по меньшей мере части хода изменения силы со временем F(t) до момента времени t1. Посредством отслеживания максимальной величины определяется максимальная величина силы, отслеживание которой осуществляется датчиком 9 силы до момента времени t1. Таким образом, в одном варианте осуществления, как показано на фиг.3, посредством траектории кривой (а1) характеристику перемещения, обусловленную приводами 7а и 7b, и место размещения упоров 8а и 8b выбирают такими, что траектория кривой силы F(t), отслеживание которой осуществляется датчиком 9 силы, достигнет максимальной величины в пределах промежутка времени до момента t1. Тем не менее, на фиг.3 три реальных типа траекторий кривых силы F(t) показаны исключительно количественно в виде (а1), (а2) и (а3). Если траектория кривой по существу соответствует (а1), это определяется, таким образом, за счет определения максимальной величины Fmax1 в течение промежутка времени до t1. С данной траекторией кривой (а1) сталкиваются, если контейнер является негерметичным, но не имеет большой утечки, как будет указано ниже. Траектории кривых F(t), соответствующие (а2) или (а3), указывают на то, что контейнер или является герметичным, или имеет малую утечку. Если траектория кривой соответствует (а2), максимальная величина силы, определенная до момента t1, соответствует Fmax1. Если траектория кривой F(t) соответствует (а3), то максимальная величина силы, определенная до момента времени t1, составляет Fmax3.
Независимо от того, когда максимальная величина Fmax силы имеет место в момент времени t1, в течение промежутка времени от 0 до t1, данная максимальная величина будет выявлена.
Если контейнер 1, подвергаемый испытанию, имеет большую утечку LL, то траектория кривой F(t) будет такой, как качественно показано посредством траектории кривой (b) на фиг.3. Для предотвращения дальнейшего, обусловленного смещением, сдавливания контейнера 1 с большой утечкой посредством смещающих элементов 5а и 5b устанавливают по меньшей мере один дополнительный заданный момент времени tLL или промежуток времени, начинающийся в нулевой момент времени, и в данный момент времени tLL осуществляется отслеживание того, достигла ли изменяющаяся сила F(t), действующая на контейнер, подвергаемый испытанию, по меньшей мере заданной величины FLL силы. Если будет определено, что в момент времени tLL пороговая величина FLL силы не будет достигнута, как показано посредством траектории кривой (b) на фиг.3, то дополнительное сдавливание, обусловленное смещением элементов 5а и 5b, будет прекращено до достижения соответствующих им упоров 8а и 8b с тем, чтобы предотвратить выдавливание содержимого контейнера 1 посредством большой течи. Если контейнер 1, подвергаемый испытанию, не имеет большой течи LL, то максимальная величина Fmax силы будет определена в пределах промежутка времени до момента t1, независимо от того, в какой момент времени подобная максимальная величина будет иметь место, и независимо от ее абсолютной величины. Таким образом, разные контейнеры без большой утечки могут дать максимальные значения Fmax силы с различными абсолютными величинами, и подобные максимальные значения могут иметь место в течение промежутка времени, проходящего до момента t1, в разные моменты времени.
Что касается определения или выявления максимального значения Fmax силы из зависимости силы от времени F(t) для контейнера, подвергаемого испытанию, то разные возможности известны квалифицированному специалисту в данной области техники. Одна прямая возможность, которая позволяет учитывать траектории кривых такого типа, как соответствующие (а2) и (а3), заключается в осуществлении выборки значения и запоминания значений изменяющейся силы F(t) и, после достижения момента t1, выбора наибольшего значения силы, которое было занесено в память. Это легко выполняется посредством аналого-цифрового преобразования электрического выходного сигнала датчика 9 силы и запоминания фактической траектории кривой зависимости силы от времени посредством цифровых дискретизированных замеров. Кроме того, для квалифицированного специалиста в данной области техники совершенно очевидно, что, если придерживаться данной методики, заносится в память только та часть траектории кривой F(t) во времени, в которой ожидается наличие максимальной величины Fmax силы. Данная зона траектории кривой во времени показана на фиг.3 исключительно в виде примера посредством зоны 11. Это обеспечивает уменьшение объема памяти, необходимого для определения максимальной величины Fmax силы.
При рассмотрении полученной траектории кривой (а), которая характерна для контейнеров без большой утечки LL, было получено объяснение, что независимо от типа подобной траектории кривой, в частности от а1 до а3, максимальная величина
Fmax силы определяется и заносится в память. После заданного промежутка времени t2-t1 выполняют дополнительное измерение силы при соответственно преобладающей траектории кривой и разность данной силы F(t2), измеренной в момент t2, и соответствующей максимальной величины Fmax оценивают как сигнал, указывающий на малую утечку. Таким образом, для траектории кривой (а1) формируется разностный сигнал ΔF, подобный показанному на фиг.3, в то время как для траекторий кривых (а2) и (а3) подобная разность будет нулевой или отрицательной.
На фиг.4 схематически в виде принципиальной схемы показано устройство по изобретению, которое выполняет методику, разъясненную с помощью фиг.3. Таким образом, использованы те же ссылочные позиции, что и на предыдущих фигурах, в отношении уже описанных элементов. Контейнер 1, подлежащий испытанию, размещен между смещающими элементами 5а и 5b, которые приводятся в движение посредством приводов 7а и 7b. Упоры 8а, 8b, которые были разъяснены в связи с фиг.1, не показаны на данной фигуре. Блок 17 синхронизации инициирует вызывающее смещение перемещение В смещающих элементов 5а и 5b и, тем самым, определяет нулевой момент 0 времени, который можно увидеть на фиг.3. Зависящий от силы, электрический выходной сигнал S(F) датчика 9 силы подается в заданный момент tLL времени, контролируемый блоком 17 синхронизации, как схематически показано, и посредством переключающего устройства SW1 в блок 21 сравнения. Таким образом, в момент tLL времени выходной сигнал S(F) сравнивается с пороговой величиной S0(FLL), указывающей на большую утечку и генерируемой блоком 23. Всякий раз когда в момент времени tLL сигнал S(F) силы не достигает значения S0(FLL), переключающее устройство SW2, на вход которого в рабочем положении подается сигнал S(F), размыкается, что вызывает посредством блока 25 управления отмену дальнейшего смещения контейнера 1 посредством смещающих элементов 5а и 5b. Если сигнал S(F) по меньшей мере достигнет пороговой величины S0(FLL) в момент tLL, то сигнал S(F) направляется посредством переключающего устройства SW2 в блок 26 памяти, который включен в течение промежутка времени М до момента t1 по фиг.3 с тем, чтобы сохранить в памяти значения электрического сигнала S(F), характеризующие соответствующую часть характеристик F(t), отслеживаемых датчиком 9. Содержимое, хранящееся в блоке 26 памяти, представляющее часть траектории кривой F(t) до момента t1, подается в блок 27 определения и запоминания максимума, в котором сигнал S(Fmax) определяется и хранится, при этом указанный сигнал определяет максимальную силу Fmax, которая была определена посредством датчика 9 силы до момента t1. В момент t2, также контролируемый блоком 17 синхронизации, максимальная величина S(Fmax), а также выходной сигнал S(F2), преобладающий в данный момент t2 в датчике 9 силы, подаются на соответствующие входы блока 28 сравнения, который генерирует на своем выходе выходной сигнал OUT(ΔF). Выходной сигнал OUT(ΔF) блока 28 сравнения указывает на свидетельствующее о малой утечке поведение контейнера 1, подвергаемого испытанию.
Несмотря на то что метод испытания и, следовательно, способ изготовления герметичных контейнеров в соответствии с настоящим изобретением создают возможность определения течей в любой части стенки 3 контейнера, они в особенности подходят для выявления течей в наиболее «критичных» частях контейнеров такого типа, какой был описан в связи с фиг.1, а именно в герметизирующем, подобном фольге элементе, который, например, приварен к границе отверстия 4 элемента, подобного бутылке. Такими наиболее критичными частями являются указанное сварное соединение 5 и герметизирующий, подобный фольге элемент, сам по себе. Для избежания ситуации, при которой поджим герметизирующего, подобного фольге элемента, который образует вторую гибкую зону 3b по фиг.1, к поверхности 9а измерения, имеющейся в датчике 9 силы, вызывает закупоривание течи, которая, возможно, имеется на поверхности контакта герметизирующего, подобного фольге элемента, в одном варианте осуществления поверхность 9а измерения, как схематически показано на фиг.2, предусмотрена с поверхностной структурой 19, которая может быть получена посредством придания шероховатости данной поверхности до заранее заданной степени. Совершенно очевидно, что поверхностям контакта смещающих элементов 5а и 5b, а также поверхности, на которой находится контейнер 1, также может быть придана определенная структура для избежания «закупоривания» возможно имеющихся там также утечек.
Вместо оценки непосредственно выходного сигнала OUT(ΔF) блока 28 сравнения можно управлять смещением посредством смещающих элементов 5а и 5b в зависимости от данного выходного сигнала, тем самым удаляя упоры 8а и 8b, подобные показанным на фиг.1. Таким образом, создается контур управления с отрицательной обратной связью (непоказанный), в котором блок 28 сравнения сравнивает номинальное значение в соответствии с выявленным и хранящимся в памяти сигналом S(Fmax) максимальной силы от блока 27 с преобладающим в данное мгновение сигналом S(F), и при этом в качестве блока регулирования в контуре управления с отрицательной обратной связью используются приводы 7а и 7b, приводящие в действие смещающие элементы 5а и 5b так, чтобы минимизировать выходной сигнал OUT(ΔF) блока 28 сравнения. Тем самым, управляющий сигнал, подаваемый к приводам 7а и 7b, используется в качестве сигнала, указывающего на утечку.
На фиг.5 схематически показан один вариант реализации блока 28 сравнения. Как было указано выше, запоминание соответствующей части сигнала S(F), характеризующего зависимость силы от времени, в блоке 26 и определение из него максимальной величины S(Fmax) в одном варианте осуществления выполняются при цифровом представлении сигнала. Для выполнения этого в соответствии с фиг.4 перед блоком 26 установлен аналого-цифровой преобразователь, как показано пунктирными линиями. В соответствии с фиг.5 детектированный цифровой сигнал
S(Fmax)# подается на один вход блока 123# формирования разности. Как схематически показано на фиг.5, например, в момент t1 или позже тот же самый хранящийся в памяти цифровой сигнал S(Fmax)# подается также на второй вход блока 123# формирования разности. Таким образом, в данный момент выходной сигнал блока 123# формирования разности должен быть нулевым. Если данный выходной сигнал отклоняется от нуля, он рассматривается как сдвинутый сигнал и хранится в блоке 127# памяти и применяется в целях коррекции для блока 123# формирования разности, например, и как показано на фиг.5, посредством блока 128# суммирования, расположенного перед одним из входов блока 123# формирования разности.
В момент t2, в соответствии с фиг.3, цифровой сигнал S(F)# (см. аналого-цифровое преобразование перед переключающим устройством SW3 на фиг.4) суммируется, как схематически показано на фиг.5, посредством блока 129# суммирования с еще преобладающим сигналом S(Fmax)#. Тем самым, полностью используется динамический диапазон блока 123# формирования разности. Тот же принцип также может быть реализован в способе аналоговой обработки сигналов.
На фиг.6 качественно показан зависящий от силы сигнал S(F) на выходе датчика 9 силы, измеренный у контейнеров 1 одинакового типа при использовании одного и того же измерительного оборудования, при этом указанные контейнеры 1 были проверены и оценены как герметичные. Это может быть выполнено посредством экспериментов, проводимых в течение длительного срока, и/или посредством систем обнаружения утечек, которые являются стандартными и имеют высокую точность, но являются медленно функционирующими и/или дорогими.
В момент tLL, в соответствии с фиг.3, значения силы, измеренные у данных герметичных контейнеров 1, немного различаются и определяют статистическое распределение. В результате получают среднее значение (RFLL)m. Пороговую величину S0(FLL) согласно фиг.4 определяют путем вычитания из значения (RFLL)m значения отклонения ΔRFLL, величину которого выбирают в соответствии с допустимой вероятностью того, что контейнер, который фактически не имеет большой утечки, будет обработан как контейнер, имеющий подобную большую утечку. Таким образом, пороговую величину S0(FLL) согласно фиг.4 устанавливают в одном варианте осуществления как величину (RFLL)m - ΔRFLL, если смотреть на фиг.6.
Во время продолжающейся операции, выполняемой на ряде одинаковых контейнеров 1, температура и геометрические характеристики подобных контейнеров 1 могут отличаться позднее вследствие производственного допуска. Таким образом, величина (RFLL)m может медленно изменяться. Каждый раз во время испытания, проводимого многократно на последующих контейнерах, в соответствующие моменты tLL времени, до которых соответствующий контейнер был идентифицирован как не имеющий сильной течи, текущий выходной сигнал датчика 9 силы вводится в блок 130 усреднения, как показано на фиг.7. В нем последние m значений указывающего на силу сигнала S(F) в момент tLL для контейнеров, не имеющих сильных утечек, усредняются. Средний результирующий сигнал  соответствует изменяющейся во времени величине (RFLL)m согласно фиг.6. Из выходного среднего результирующего сигнала
соответствует изменяющейся во времени величине (RFLL)m согласно фиг.6. Из выходного среднего результирующего сигнала  вычитают отклонение ΔRFLL, и результат данной операции представляет собой динамически изменяющееся опорное значение, используемое как величина S0(FLL) для блока 21 в соответствии с фиг.4. Данное динамически изменяющееся опорное значение S0(FLL) согласно фиг.4 показано на фиг.8 качественно, начиная от исходной уставки, какую, например, определяют, как было указано, с помощью измерений подвергаемых испытаниям контейнеров 1 без большой утечки.
вычитают отклонение ΔRFLL, и результат данной операции представляет собой динамически изменяющееся опорное значение, используемое как величина S0(FLL) для блока 21 в соответствии с фиг.4. Данное динамически изменяющееся опорное значение S0(FLL) согласно фиг.4 показано на фиг.8 качественно, начиная от исходной уставки, какую, например, определяют, как было указано, с помощью измерений подвергаемых испытаниям контейнеров 1 без большой утечки.
После того как будет установлено, что подвергаемый испытанию контейнер 1 не имеет большой утечки LL, как было разъяснено с помощью фиг.4, на выходе блока 28 сравнения формируется выходной сигнал OUT(ΔF), который указывает на наличие малой утечки. В соответствии с фиг.9 выходной сигнал OUT(ΔF) подвергается дополнительной оценке посредством подачи его в блок 125 сравнения, который включается в момент времени t2 или после момента времени t2. Посредством источника 130 эталонной величины эталонная величина ΔSLREF подается в блок 125 сравнения. Как будет разъяснено ниже, величину ΔSLREF можно изменять со временем управляемым образом, и/или эталонную величину ϕR, с которой соотносится величина ΔSLREF, можно также изменять со временем управляемым образом. Если сигнал OUT(ΔF) в момент t2 времени больше опорной величины ΔSLREF, то в блоке 125 формируется сигнал SL, указывающий на наличие малой утечки SL в контейнере 1, подвергаемом испытанию. Если сигнал OUT(ΔF) не достигает величины ΔSLREF, то контейнер рассматривается как герметичный, так как не было выявлено ни большой утечки LL, ни малой утечки SL.
Если снова обратиться к фиг.8, можно видеть, что средний сигнал (tLL) также представляет собой основу для отнесения величины ΔSLREF по фиг.9. Таким образом, в одном варианте осуществления и как показано на фиг.9, опорную величину ΔSLREF не соотносят со статической величиной, но соотносят с сигналом (tLL), формируемым на выходе блока 130 усреднения по фиг.7.
В дополнительном варианте осуществления с признаками, которые могут быть реализованы отдельно или в дополнение к реализации динамической пороговой величины S0(FLL) и/или динамической базовой величины (tLL) для ΔSLREF. Тем самым и в соответствии с фиг.10 текущий сигнал OUT(ΔF) разности сил подается в блок 135 усреднения всякий раз, когда выходной сигнал SL блока 125 сравнения по фиг.9 указывает на то, что подвергаемый испытанию контейнер является герметичным. Выходной сигнал блока 135, который соответствует среднему сигналу  разности сил, усредненному для последних m циклов испытаний, корректируют на величину ΔΔF, при этом результат данной операции используют как изменяющийся во времени сигнал ΔSLREF, используемый в блоке 125.
разности сил, усредненному для последних m циклов испытаний, корректируют на величину ΔΔF, при этом результат данной операции используют как изменяющийся во времени сигнал ΔSLREF, используемый в блоке 125.
Если снова обратиться к фиг.8, на которой видно, что был использован постоянный сигнал ΔSLREF, процедура усреднения ΔF приводит, как схематически показано посредством траектории кривой (ΔSLREF)t, к динамически изменяющейся величине ΔSLREF, которая изменяется в соответствии с изменениями параметров возмущающих воздействий, влияющих на подобную разность сил. Очевидно, что обеспечение наличия динамически изменяющегося сигнала (ΔSLREF)t в соответствии с тем, как представлено на фиг.8, может быть осуществлено без обеспечения наличия динамически изменяющейся базовой величины (tLL) при соотнесении (ΔSLREF)t со стабильной постоянной величиной ϕR, как показано на фиг.9, посредством изображения, выполненного пунктирной линией, вместо соотнесения с динамически изменяющейся величиной (tLL).
В соответствии с фиг.11 множество испытательных станций 140 перемещаются вместе с конвейерным устройством 142 для контейнеров 1, подлежащих испытанию. Во время перемещения контейнеров 1 они подаются в испытательные станции 140, которые продолжают перемещаться вместе с конвейерным устройством 142. Каждое испытательное устройство 140 имеет такую конструкцию, какая была разъяснена. На упрощенном изображении согласно фиг.11 показаны соответствующие сдавливающие смещающие элементы 5а и 5b на каждой испытательной станции, а также датчики 9 силы. Без прерывания перемещения контейнеры 1 сдавливают со смещением посредством смещающих элементов 5а и 5b и оценивают получающуюся в результате силу, выявленную соответствующим датчиком 9 силы. Если будет обнаружено, что контейнер негерметичный, его отделяют от герметичных контейнеров, как схематически показано посредством избирательного переключателя 144, что приводит к ряду контейнеров 1UL, которые являются герметичными. Таким образом, результатом испытания контейнеров является изготовление герметичных контейнеров 1UL.
В качестве датчика 9 силы могут быть использованы различные известные датчики, подобные, например, пьезодатчикам. В варианте осуществления, реализованном в настоящее время, датчик 9 силы включает в себя измерительный преобразователь с тензодатчиком сопротивления (тензорезистором), подобный, например, датчику типа Z6, изготавливаемому компанией Hottinger Baldwin Messtechnik GmbH, Германия.
При использовании реализованного в настоящее время варианта осуществления для испытания в процессе изготовления на поточной линии потока пластиковых бутылок, герметично закрытых подобным фольге элементом, описанным выше, достигают производительности, которая существенно выше 600 бутылок в минуту. Чрезвычайно высокая производительность базируется главным образом на очень быстром способе испытания, в котором смещение контейнеров 1, вызывающее их сдавливание, обеспечивается посредством быстрого перемещения смещающих элементов 5а и 5b до соответствующих им упоров 8а и 8b, как показано на фиг.1. Поскольку в соответствии с фиг.1 во время перемещения контейнеров параллельно подвергают испытанию более одного контейнера, указанная высокая скорость испытания даже увеличивается.
Изобретение относится к области испытательной техники и направлено на повышение производительности и скорости испытаний герметично закрытых контейнеров. Этот результат обеспечивается за счет того, что закрытый контейнер, подлежащий проверке на герметичность, сдавливают посредством смещающих элементов в первой гибкой зоне и осуществляют отслеживание силы, возникающей во второй гибкой зоне контейнера на поверхности измерения силы в течение некоторого промежутка времени. Определяют максимальную силу, имеющую место в течение данного промежутка времени. В более поздний момент указанную силу измеряют и утечку из контейнера определяют в зависимости от разности указанной максимальной силы и измеренной силы. 5 н. и 20 з.п. ф-лы, 11 ил.
1. Способ изготовления герметично закрытых контейнеров с первой и второй гибкими зонами стенки, имеющими разные характеристики гибкости, в котором выполняют закрытый контейнер, перемещают по меньшей мере один смещающий элемент к одной и на одну из указанных первой и второй гибких зон стенки указанного контейнера, отслеживают смещающую силу, действующую на указанный контейнер, прекращают указанное перемещение, осуществляют выборку значения указанной отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени, осуществляют выборку значения указанной отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы, формируют разностный сигнал на основе указанных первого и второго измерительных сигналов силы, указанный контейнер считают герметичным, если указанный разностный сигнал удовлетворяет критерию для испытания, и дополнительно включающий в себя перемещение указанного смещающего элемента к указанной первой гибкой зоне стенки и на указанную первую гибкую зону стенки, отслеживание указанной смещающей силы в указанной второй гибкой зоне, при этом выборка значений указанной отслеживаемой смещающей силы, дающая в результате указанный первый измерительный сигнал, включает в себя определение максимальной величины сигнала силы, имеющего место в течение промежутка времени, прошедшего до указанного первого момента времени и включающего в себя указанный первый момент времени.
2. Способ по п.1, дополнительно включающий в себя этап перемещения указанного смещающего элемента до заданного положения относительно указанного контейнера.
3. Способ по одному из пп.1 или 2, в котором указанное прекращение перемещения выполняют по меньшей мере, по существу, в указанный первый момент времени.
4. Способ по одному из пп.1-3, который дополнительно включает в себя выбор заданного промежутка времени и определение указанной максимальной величины силы, которая имела место в течение указанного заданного промежутка времени, прошедшего до указанного первого момента времени и включающего в себя указанный первый момент времени.
5. Способ по одному из пп.1-4, в котором указанное смещение включает в себя перемещение по меньшей мере двух смещающих элементов к указанной первой гибкой зоне стенки и на указанную первую гибкую зону стенки с противоположных сторон указанного контейнера.
6. Способ по одному из пп.1-5, в котором указанная первая гибкая зона стенки контейнера представляет собой зону стенки корпуса указанного контейнера, и указанная вторая гибкая зона стенки представляет собой герметизирующий элемент, закрывающий отверстие корпуса указанного контейнера.
7. Способ по п.6, в котором указанная вторая гибкая зона представляет собой подобный фольге герметизирующий элемент, закрывающий указанное отверстие.
8. Способ по одному из пп.1-7, дополнительно включающий в себя отслеживание указанной смещающей силы у указанной второй гибкой зоны стенки вдоль поверхности измерения силы, которая расположена на расстоянии заданной величины от указанной второй гибкой зоны при несмещенном состоянии указанного контейнера, при этом указанная заданная величина существенно меньше максимального расстояния, на которое указанная вторая гибкая зона стенки может выгибаться наружу вследствие повышенного давления в указанном контейнере.
9. Способ по одному из пп.1-8, в котором указанное отслеживание смещающей силы включает в себя отслеживание посредством тензорезистора.
10. Способ по одному из пп.1-9, дополнительно включающий в себя сравнение указанной отслеживаемой смещающей силы в третий момент времени, предшествующий указанному первому моменту времени, с пороговой величиной, и оценку контейнера как имеющего большую утечку, если указанная отслеживаемая сила не достигает по меньшей мере указанной пороговой величины.
11. Способ по одному из пп.1-10, дополнительно включающий в себя выполнение множества указанных контейнеров, перемещающихся на конвейере, и выполнение указанного перемещения, прекращение перемещения, отслеживания, выборки значений и формирования разностного сигнала и оценки на более чем одном из указанных перемещаемых контейнеров на указанном конвейере.
12. Способ по одному из пп.1-11, дополнительно включающий в себя сравнение указанной отслеживаемой силы в третий момент времени, предшествующий указанному первому моменту времени, с пороговой величиной, и оценку контейнера как не имеющего большей утечки, если указанная отслеживаемая сила в указанный третий момент времени по меньшей мере достигает указанной пороговой величины, усреднение величины указанной отслеживаемой силы в указанный третий момент времени, если указанная пороговая величина по меньшей мере достигнута, с такими значениями силы, измеренными у подвергнутых испытанию контейнеров, которые были определены как не имеющие большой утечки, и применение указанной пороговой величины в зависимости от результата указанного усреднения.
13. Способ по одному из пп.1-12, дополнительно включающий в себя сравнение указанного разностного сигнала с указывающей на малую утечку пороговой величиной.
14. Способ по п.13, дополнительно включающий в себя этап усреднения указанного разностного сигнала с такими разностными сигналами, которые были сформированы во время предшествующего испытания контейнеров, которые были определены как герметичные, и регулирование указанной, указывающей на малую утечку, пороговой величины в зависимости от результата указанного усреднения.
15. Способ по одному из пп.1-14, дополнительно включающий в себя обеспечение по меньшей мере одной пороговой величины силы и сравнение указанной отслеживаемой силы с указанной пороговой величиной, в результате чего осуществляется корректировка указанной пороговой величины в зависимости от результата сравнения.
16. Устройство для испытания на герметичность, предназначенное для испытания на герметичность закрытого контейнера с по меньшей мере первой и второй гибкими зонами стенки, имеющими разные характеристики гибкости, содержащее смещающее устройство для сжатия контейнера, подвергаемого испытанию, датчик силы, размещаемый на стенке указанного контейнера, подвергаемого испытанию, и генерирующий электрический выходной сигнал; при этом выход указанного датчика силы функционально соединен с блоком памяти; выход указанного блока памяти функционально соединен с одним входом блока сравнения, а второй вход блока сравнения функционально соединен с выходом указанного датчика силы, при этом указанное смещающее устройство расположено с возможностью смещения первой гибкой зоны указанного контейнера, а указанный датчик силы расположен с возможностью его взаимодействия со второй гибкой зоной указанного контейнера.
17. Устройство по п.16, в котором указанное смещающее устройство содержит по меньшей мере два выполненных с возможностью перемещения друг относительно друга смещающих элемента, перемещаемых друг относительно друга в плоскости, а указанный датчик силы имеет поверхность измерения силы, которая обеспечивает определение сил, по существу, перпендикулярных к указанной плоскости.
18. Устройство по п.16 или 17, в котором указанный датчик силы содержит тензорезистор.
19. Устройство по одному из пп.17 или 18, в котором указанное смещающее устройство содержит по меньшей мере два выполненных с возможностью перемещения друг относительно друга, смещающих элемента, перемещаемых с возможностью передачи приводного усилия друг к другу и друг от друга.
20. Устройство по одному из пп.16-19, в котором указанное смещающее устройство взаимодействует с механическим упором.
21. Устройство по одному из пп.16-20, в котором выход указанного датчика силы функционально соединен с входом блока определения максимальной величины.
22. Устройство по одному из пп.16-21, дополнительно содержащее конвейерное устройство для множества указанных контейнеров, и по меньшей мере два указанных смещающих устройства и датчика силы, перемещающихся вместе с конвейером.
23. Способ изготовления герметично закрытых контейнеров с первой и второй гибкими зонами стенки, имеющими разные характеристики гибкости, в котором выполняют закрытый контейнер, перемещают по меньшей мере один смещающий элемент относительно одной из указанных гибких зон стенки указанного контейнера, к ней и на нее, отслеживают смещающую силу, действующую на указанный контейнер, прекращают указанное перемещение, осуществляют выборку значения указанной отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени, осуществляют выборку значения указанной отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы, формируют разностный сигнал на основе указанных первого и второго измерительных сигналов силы, в качестве одного указывающего на утечку сигнала, корректируют средний сигнал из указанных разностных сигналов, сформированных во время предшествующего испытания контейнеров, если указанный контейнер является герметичным, и сравнивают указанный разностный сигнал по меньшей мере с одним пороговым сигналом, при этом по меньшей мере один пороговый сигнал регулируют в зависимости от указанного среднего сигнала, и дополнительно включающий в себя перемещение указанного смещающего элемента относительно указанной первой гибкой зоны стенки, к ней и на нее, отслеживание указанной смещающей силы на указанной второй гибкой зоне стенки, осуществление выборки значения указанной отслеживаемой смещающей силы, дающее в результате указанный первый измерительный сигнал силы, включающее в себя определение максимальной величины сигнала силы, которая имела место в течение промежутка времени, прошедшего до указанного первого момента времени и включающего в себя указанный первый момент времени.
24. Способ изготовления герметично закрытых контейнеров с первой и со второй гибкими зонами стенки, имеющими разные характеристики гибкости, в котором выполняют закрытый контейнер, перемещают по меньшей мере один смещающий элемент относительно одной из указанных гибких зон стенки указанного контейнера, к ней и на нее, отслеживают смещающую силу, действующую на указанный контейнер, прекращают указанное перемещение, осуществляют выборку значения указанной отслеживаемой смещающей силы, что в результате дает первый измерительный сигнал силы в первый момент времени, осуществляют выборку значения указанной отслеживаемой смещающей силы по меньшей мере в один второй последующий момент времени, что в результате дает второй измерительный сигнал силы, формируют разностный сигнал на основе указанных первого и второго измерительных сигналов, в качестве сигнала, указывающего на утечку, осуществляют выборку значения указанной отслеживаемой смещающей силы в дополнительный момент времени, что в результате дает фактический дополнительный измерительный сигнал силы, который указывает на утечку, при этом средний сигнал из дополнительных измерительных сигналов силы, сформированных во время предшествующего испытания герметичных контейнеров, корректируют в соответствии с указанным фактическим дополнительным измерительным сигналом силы, если указанный измерительный сигнал силы указывает на герметичный контейнер, сравнивают указанный разностный сигнал с пороговой величиной, зависящей от указанного среднего сигнала, отбраковывают контейнер, определенный как негерметичный, и дополнительно включающий в себя перемещение указанного смещающего элемента относительно указанной первой гибкой зоны стенки, к ней и на нее, отслеживание указанной смещающей силы на указанной второй гибкой зоне, осуществление выборки значения указанной отслеживаемой смещающей силы, дающее в результате указанный первый измерительный сигнал силы, включающее в себя определение максимальной величины сигнала силы, которая имела место в течение промежутка времени, прошедшего до указанного первого момента времени и включающего в себя указанный первый момент времени.
25. Способ изготовления закрытых контейнеров с гибкой частью стенки, включающий в себя следующие этапы: выполнение закрытого контейнера, подвергание указанного контейнера смещающему воздействию, отслеживание смещающей силы, действующей на указанный контейнер, определение, исходя из указанной отслеживаемой силы, максимальной величины силы в течение некоторого промежутка времени, запоминание сигнала, зависящего от указанной максимальной величины силы, сравнение сигнала, зависящего от указанной отслеживаемой смещающей силы, с указанным хранимым в памяти сигналом, отбраковку указанного контейнера как негерметичного, в зависимости от результата указанного сравнения.
| US 6439032 B1, 27.08.2002 | |||
| Аэродинамические тензометрические весы | 1974 |
|
SU522440A1 |
| US 4930345 A, 05.06.1990 | |||
| WO 02073151 A1, 19.09.2002 | |||
| СПОСОБ ПРОВЕРКИ ГЕРМЕТИЧНОСТИ И/ИЛИ УКУПОРКИ ЕМКОСТИ | 1999 |
|
RU2224230C2 |
| Способ контроля герметичности изделий из эластичных материалов | 1987 |
|
SU1603206A1 |

