Изобретение относится к области измерений радиолокационных характеристик объектов и может быть использовано для измерений интегральной и дифференциальной эффективной площади рассеяния (ЭПР) объектов сложной формы, а также определения местоположения отдельных «блестящих точек» в их составе применительно к совмещенным радиолокационным системам.
Известны способы измерения интегральной и дифференциальной ЭПР объектов сверхширокополосным и узкополосным импульсным или непрерывным монохроматическим зондирующими сигналами и радиолокационные измерительные комплексы (РИК) для их реализации в некотором фиксированном поляризационном базисе [Марлоу, Ватсон, Ван-Хозер. Комплекс RATSCAT для измерения радиолокационного поперечного сечения целей. ТИИЭР, 1965, т.53, 8, стр.1231…1232; Е.И.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. радио, 1972, стр.175…177; АС №968500, AC №980317, журнал «Вопросы оборонной техники», 1980, вып. 150, стр.57…63].
Сущность способа с использованием сверхширокополосных сигналов [Е.И.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. радио, 1972, стр.175…177] заключается в облучении объекта радиолокационным импульсным сигналом нано- или пикосекундной длительности, обеспечивающим высокое (до единиц - десятков сантиметров) разрешение по дальности, последующем приеме отраженного от исследуемого объекта сигнала, его обработке и регистрации с последующим сравнением мощностей сигналов, отраженных от исследуемого объекта в элементе разрешения и калибровочного отражателя с известной ЭПР, размещаемого в месте расположения объекта взамен его. Дальность от РИК до исследуемого объекта определятся линейными размерами антенны и объекта по максимальной частоте спектра зондирующего импульса.
Реализующий способ РИК включает генератор сверхширокополосного импульсного сигнала, выход которого через антенный переключатель (коммутатор «прием - передача») соединен со входом приемо-передающей антенны, связанной по радиоканалу (облучающий сигнал - отраженный сигнал) с исследуемым объектом, выход приемо-передающей антенны через тот же коммутатор соединен с широкополосным приемником, выход которого соединен с регистрирующим устройством.
Сущность способа измерения дифференциальной ЭПР объектов узкополосным импульсным или непрерывным монохроматическим сигналами [Е.И.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. радио, 1972, стр.175…177] заключается в облучении объекта зондирующим сигналом фиксированной поляризации, излученным через приемо-передающую антенну, обеспечивающую высокую степень фокусировки излученного сигнала с помощью той же антенны на поверхности объекта, приеме ортогонально-поляризованных компонент рассеянного объектом сигнала с заданного направления с помощью той же антенны при различных фиксированных угловых положениях объекта. Дальность от РИК до исследуемого объекта определятся линейными размерами площади поверхности объекта, «освещаемой» диаграммой направленности антенны. Как правило, измерения проводятся в ближней зоне антенны.
Реализующий способ РИК включает генератор узкополосного импульсного или непрерывного монохроматического сигналов, выход которого через двойной волноводный Т-мост соединен со входом приемо-передающей антенны, связанной по радиоканалу (облучающий сигнал - отраженный сигнал) с исследуемым объектом, выход приемо-передающей антенны через тот же двойной волноводный Т-мост соединен с приемным устройством, выход которого соединен с регистрирующим устройством.
Сущность способа измерения дифференциальной эффективной площади рассеяния объектов на трассе «земля-земля» когерентным (доплеровским) методом [Е.И.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. радио, 1972, стр.163…166] заключается в облучении исследуемого объекта непрерывным или импульсным сигналом фиксированной мощности и фиксированной поляризации линейного базиса, излученным измерительной РЛС через приемо-передающую антенну, приеме рассеянного объектом сигнала с заданного направления с помощью той же антенны при различных угловых или горизонтально-вертикальных перемещениях объекта, которые эквивалентны соответствующим перемещениям источника излучения относительно объекта для исследования спектра отражения перемещающихся с различной угловой скоростью его элементов конструкции, измерении и сравнении их спектральных компонент с последующей привязкой к топологической схеме объекта.
Реализующий известный способ радиолокационный измерительный комплекс содержит когерентный приемопередатчик, приемо-передающую антенну, волноводный переключатель, генератор синхроимпульсов, антенные коммутаторы, регистрирующее устройство, устройства вращения и горизонтально-вертикального перемещения исследуемого объекта.
Однако для реализации способов с использованием сверхширокополосных сигналов необходимо создание специальной передающей и приемной аппаратуры РИК, обеспечивающей требуемые длительность зондирующих импульсов (менее 0,001 мкс) и соответствующую полосу пропускания приемного устройства (более 100 МГц), что при разработке полевых установок для измерения дифференциальных радиолокационных характеристик реальных объектов, так называемых «блестящих точек», требует больших финансовых затрат. В свою очередь, при использовании узкополосных и непрерывных монохроматических зондирующих сигналов при определении дифференциальных РЛХ объектов необходимо создание специализированных стендов для проведения измерений в ближней зоне. В случае использования когерентных методов - необходимо создание специальных большегрузных поворотных устройств для вращения объекта, наличие когерентной измерительной РЛС и специальных спектроанализаторов для измерения составляющих спектра в диапазоне 2…20 Гц [См. например, Д.Бартон, Г.Вард. Справочник по радиолокационным измерениям. М., Сов. радио, 1976, стр.188…191, М.Е.Варганов, Ю.С.Зиновьев и др. Радиолокационные характеристики летательных аппаратов. М., Радио и связь, 1985, стр.152…168].
Наиболее близким техническим решением к изобретению по технической сущности является способ измерения интегральной эффективной площади рассеяния объектов в полигонных условиях на трассе «земля-земля», заключающийся в облучении исследуемого объекта импульсным узкополосным сигналом фиксированной мощности и фиксированной поляризации линейного базиса, излученным измерительной РЛС через приемо-передающую антенну, приеме ортогонально-поляризованных компонент рассеянного объектом сигнала с помощью той же антенны при различных угловых положениях объекта, измерении и сравнении их мощности с мощностью сигналов соответствующей поляризации, отраженных от эталонного отражателя с известной ЭПР, описание которого приведено в книге Е.И.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей (Сов. Радио, М., 1972, стр. 166…175).
Реализующий известный способ радиолокационный измерительный комплекс содержит генератор синхроимпульсов, один выход которого соединен с импульсным передатчиком, выход которого соединен с волноводным переключателем (антенным коммутатором поляризации излучения), выход которого соединен с приемо-передающей антенной, связанной по радиоканалу (облучающий сигнал - отраженный сигнал) с исследуемым объектом (калибровочным отражателем), выход приемо-передающей антенны через поляризационный ращепитель и тот же коммутатор соединен с двухканальным приемным устройством совпадающей и ортогональной поляризаций, выходы которого соединены с регистрирующим устройством, второй выход генератора синхроимпульсов соединен с приемником для обеспечения стробирования полезного, отраженного от объекта сигнала по дальности, а выход датчика углового положения исследуемого объекта (калибровочного отражателя) устройства вращения соединен со входом регистрирующего устройства. При калибровке измерений используется калибровочный отражатель, устанавливаемый вместо исследуемого объекта и связанный по радиоканалу с приемо-передающей антенной. Описание комплекса приведено в работе Е.Н.Майзельс, В.В.Торгованов. Измерение характеристик рассеяния радиолокационных целей. М., Сов. Радио. 1972, стр.179…186.
Недостатками известного способа и реализующего его устройства являются:
первое - узкоспециальная направленность подобного РИК только для проведения измерений интегральной ЭПР объектов в дальней зоне приемо-передающей антенны и необходимость значительной его доработки для проведения измерений дифференциальной ЭПР объектов;
второе - для реализации возможности измерений дифференциальной ЭПР исследуемого объекта необходимо либо создание специальной антенны большой апертуры, обеспечивающей формирование узкого луча при работе в дальней зоне, что несовместимо с понятием плоского поля, либо его фокусировку на поверхности объекта при переносе измерений в ближнюю зону антенны, либо использование когерентных доплеровских методов в дальней зоне измерений [А.З.Фрадин, Е.В.Рыжков. Измерение параметров антенн. - М.: Связьиздат, 1962, стр.247…256].
Технической задачей настоящего изобретения является расширение функциональных возможностей РИК полигонного типа за счет обеспечения измерений как интегральной, так и дифференциальной ЭПР исследуемых объектов.
Поставленная задача достигается тем, что в известном способе измерения ЭПР объектов, заключающемся в облучении исследуемого объекта импульсным узкополосным сигналом фиксированной мощности и фиксированной поляризации линейного базиса, излученным приемопередатчиком РИК через приемо-передающую антенну, приеме ортогонально поляризованных компонент рассеянного объектом сигнала с помощью той же антенны, измерении и сравнении их мощности с мощностью сигналов соответствующей поляризации, отраженных от калибровочного отражателя с известной ЭПР, излученный приемо-передающей антенной сигнал дополнительно зеркально переотражают в направлении объекта с помощью плоского пассивного ретранслятора с низким (менее -30 дБ) уровнем боковых лепестков бистатической индикатрисы рассеяния, например плоской ромбической пластиной, геометрические размеры (lP) которого выбирают в соответствии с требуемой линейной разрешающей способностью по угловым координатам в вертикальной (δε) и горизонтальной (δθ) плоскостях, переотражают совпадающие и ортогонально поляризованные компоненты рассеянного объектом сигнала с помощью того же пассивного ретранслятора в направлении приемо-передающей антенны, принимают и измеряют их мощность, при этом пассивный ретранслятор размещают в дальней зоне приемо-передающей антенны на дальности
 ,
,
где lA - размер раскрыва антенны;
λ - длина волны,
а исследуемый объект (калибровочный отражатель) устанавливают неподвижно под требуемым ракурсом в промежуточной зоне ретранслятора на дальности
и в соответствии с линейным размером проекции исследуемого объекта, плоскость которой нормально ориентирована к направлению падения электромагнитной волны от ретранслятора, последний равномерно перемещают в горизонтальной плоскости вдоль оптической оси приемо-передающей антенны в пределах разрешающей способности измерительной РЛС по дальности для фиксированных значений угла визирования объекта в вертикальной плоскости, а при обработке результатов измерений учитывают величину линейного перемещения ретранслятора вдоль исследуемого объекта.
В радиолокационный измерительный комплекс для измерения ЭПР исследуемых объектов, содержащий генератор синхроимпульсов, один выход которого соединен с импульсным передатчиком, выход которого соединен с волноводным переключателем, который через антенный коммутатор поляризации излучения соединен с приемо-передающей антенной, связанной по радиолокационному каналу (облучающий сигнал - отраженный сигнал) с исследуемым объектом (или калибровочным отражателем), выход приемо-передающей антенны через поляризационный ращепитель и тот же волноводный переключатель соединен с двухканальным приемным устройством совпадающей и ортогональной поляризаций, соответствующие выходы которого соединены с регистрирующим устройством, второй выход генератора синхроимпульсов соединен с приемником для обеспечения стробирования полезного, отраженного от объекта (или калибровочного отражателя) сигнала по дальности, а выход датчика углового положения исследуемого объекта, установленного на устройстве вращения, соединен со входом регистрирующего устройства, введен пассивный ретранслятор, связанный по радиолокационному каналу с приемо-передающей антенной и исследуемым объектом (или калибровочным отражателем), с низким уровнем боковых лепестков бистатической индикатрисы рассеяния, размеры которого обеспечивают требуемую разрешающую способность комплекса в вертикальной и горизонтальной плоскостях и который состоит из плоской пластины, жестко связанной с устройствами наведения ретранслятора по угловым координатам и перемещения в вертикальной плоскости и установленной на малотражающей мачте, которая установлена на устройстве равномерного перемещения пассивного ретранслятора по горизонтальным направляющим, оринтированным вдоль оптической оси приемо-передающей антенны, с датчиком линейного перемещения, выход которого соединен со входом регистрирующего устройства.
Сущность предлагаемого изобретения заключается в том, что переотражение зондирующего сигнала от приемо-передающей антенны в направлении исследуемого объекта узким лучом с помощью плоского пассивного ретранслятора большого размера (более 100λ) позволяет, по сравнению с известным способом, существенно повысить разрешающую способность РИК по угловым координатам. Это обеспечивает возможность измерения ЭПР отдельных элементов конструкции объекта сложной формы, «освещаемых» диаграммой пассивного ретранслятора. Использование для этих целей плоского пассивного ретранслятора устраняет необходимость доработок антенных устройств РИК в части увеличения их эффективной действующей площади и особенно параболических зеркальных антенн, широко использующихся при измерениях элементов поляризационной матрицы рассеяния. Кроме того, плоский пассивный ретранслятор практически не деполяризует переотраженный сигнал линейного базиса, что обеспечивает возможность его использования при измерении элементов поляризационной матрицы рассеяния объекта. Применение пассивного ретранслятора с низким, менее -30 дБ, уровнем боковых лепестков бистатической индикатрисы рассеяния позволяет практически исключить ошибку измерения, обусловленную переотражениями от местных предметов и других элементов конструкции объекта, находящихся в зоне боковых лепестков в пределах строба дальности РИК, и обеспечить сохранение высокой точности измерений (погрешность определения величины ЭПР не превышает 30%), имеющейся в известном способе. Линейное перемещение пассивного ретранслятора вдоль видимой проекции исследуемого объекта по направляющим, параллельным оптической оси приемо-передающей антенны, позволяет снимать линейное распределения «блестящих точек» для фиксированного ракурса наблюдения объекта относительно пассивного ретранслятора, а вращение последнего при фиксированном положении пассивного ретранслятора - круговую диаграмму их распределения. Предлагаемый способ обладает широкими возможностями в части повышения разрешающей способности РИК по угловым координатам как за счет уменьшения линейных размеров пассивного ретранслятора и укорочения длины волны РИК, так и возможности проведения измерений в дальней зоне измерительной антенны РИК при ее наведении на исследуемый объект - его интегральных РЛХ, и в промежуточной зоне пассивного ретранслятора - дифференциальных РЛХ исследуемого объекта при наведении антенны на исследуемый объект через пассивный ретранслятор. Крепление плоского пассивного ретранслятора на малоотражающей мачте, снабженной механическими устройствами его наведения по угловым координатам и перемещения в вертикальной плоскости обеспечивает необходимую точность наведения в вертикальной и горизонтальной плоскостях на исследуемый объект, а также требуемый угол визирования в вертикальной плоскости. Использование малоотражающей мачты, например металлической фермы, покрытой радиопоглощающим материалом, исключает переотражение зондирующего и отраженного от объекта сигнала элементами мачты и, следовательно, не увеличивает погрешность измерений элементов поляризационной матрицы рассеяния. Установка устройства равномерного перемещения пассивного ретранслятора с датчиком на направляющих, размещенных горизонтально на поверхности земли и ориентированных вдоль оптической оси приемо-передающей антенны, а также сопряжение устройства ее равномерного перемещения с датчиком линейного перемещения, выход которого подключен ко входу регистрирующего устройства, обеспечивает перемещение главного лепестка бистатической индикатрисы рассеяния пассивного ретранслятора по исследуемому объекту и одновременную привязку мощности принимаемых сигналов к длине видимой проекции исследуемого объекта, что обеспечивает необходимую точность измерений.
Таким образом, у заявляемого решения появляются свойства, заключающиеся в повышении разрешающей способности РИК по угловым координатам без применения специальной фокусирующей приемо-передающей антенны, осуществлении точного контролируемого наведения ретранслятора на требуемый элемент объекта, возможности перемещения главного лепестка бистатической индикатрисы рассеяния плоского пассивного ретранслятора вдоль исследуемого объекта и привязке мощности принимаемых сигналов к длине и угловому положению объекта в масштабе реального времени без необходимости использования сверхширокополосного зондирующего сигнала, использования специальной фокусирующей антенны для проведения измерений в ближней зоне, не совпадающие со свойствами, проявляемыми отличительными признаками в известных решениях и не равные сумме этих свойств, обеспечивающие достижение положительного эффекта, заключающегося в расширении функциональных возможностей измерений в части измерений как интегральной, так и дифференциальной ЭПР объекта, выявления «блестящих точек» и определения их местоположения в составе исследуемого объекта сложной формы, независимо от его массогабаритных размеров, при обеспечении высокой точности указанных измерений с помощью приемопередатчиков РИК различных длин волн в виде импульсных измерительных РЛС, использующих узкополосные зондирующие сигналы, путем повышения разрешающей способности комплекса по угловым координатам без специальных доработок антенн и поворотных устройств измерительного комплекса.
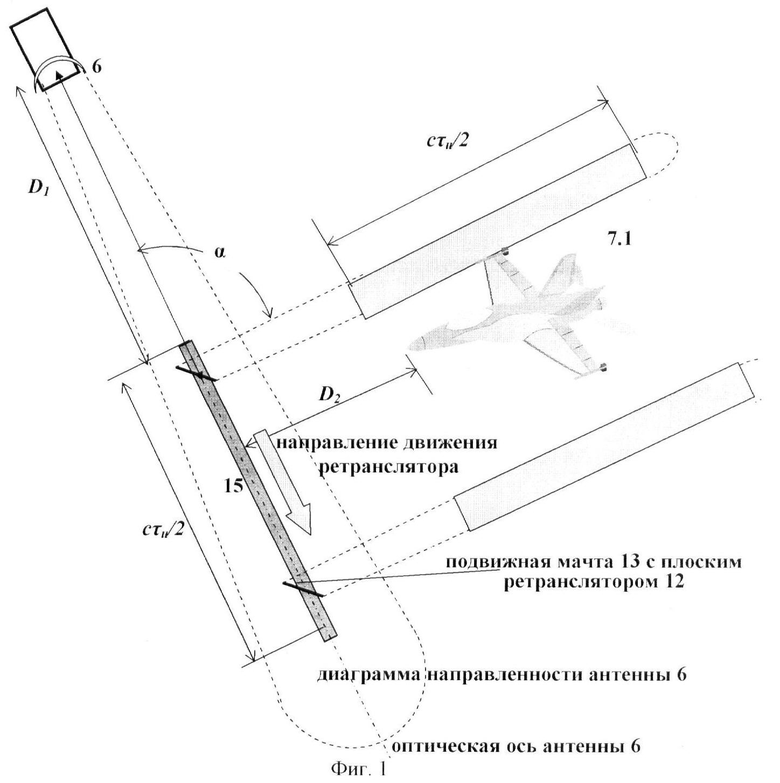
На фигуре 1 приведена схема в горизонтальной плоскости проведения измерений по предлагаемому способу и перемещения ретранслятора по горизонтальным направляющим.
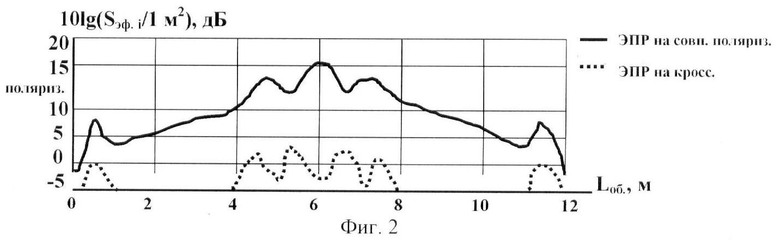
На фигуре 2 приведена результирующая диаграмма распределения «блестящих точек» вдоль видимой проекции летательного аппарата, продольная ось которого ориентирована нормально к плоскости падения электромагнитной волны от ретранслятора.
На фигуре 3 представлена структурная схема предлагаемого радиолокационного измерительного комплекса.
Сущность предлагаемого способа заключается в определении ЭПР «блестящих точек» (Sэф.i) путем измерения и последующего сравнения уровней мощности принимаемых сигналов, рассеянных отдельными элементами конструкции исследуемого объекта (РПРМi), находящимися в площади проекции главного лепестка бистатической индикатрисы рассеяния пассивного ретранслятора с учетом его линейного перемещения вдоль объекта (Lоб) и калибровочного отражателя (РПРМэт.) с известной величиной ЭПР (Sэф.эm) в соответствии с формулой
где Lоб=LP sinα;
Lоб - текущее значение линейного перемещения пассивного ретранслятора вдоль оптической оси приемо-передающей антенны относительно начального положения;
α - угол между направлениями «пассивный ретранслятор - приемопередатчик РИК» и «пассивный ретранслятор - исследуемый объект».
При этом максимальные линейные размеры калибровочного отражателя (lэm) должны удовлетворять условию
(2…3)λ<lэт<0,5δθ (или δε), при δθ<δε («или» - при δθ>δε)
где λ - рабочая длина волны РИК;
δθ, δε - результирующая линейная разрешающая способность приемопередатчика РИК (ширина главного лепестка бистатической индикатрисы рассеяния пассивного ретранслятора по уровню половинной мощности) в горизонтальной и вертикальной плоскостях соответственно.
Горизонтальное перемещение пассивного ретранслятора вдоль оптической оси приемо-передающей антенны в пределах разрешающей способности приемопередатчика РИК по дальности (для фиксированных значений угла визирования в вертикальной плоскости) обеспечивает последовательное «освещение» всей конструкции объекта главным лепестком бистатической индикатрисы рассеяния пассивного ретранслятора.
При этом должно сохраняться условие двойного превышения максимального линейного размера исследуемого объекта (Lоб.max) величиной разрешающей способности приемопередатчика РИК по дальности, т.е.
где с - скорость распространения радиоволн в свободном пространстве;
τи - длительность зондирующего импульса приемопередатчика РИК.
Расстояние D1 между пассивным ретранслятором и приемо-передающей антенной выбирается из условия дальней зоны антенны
 ,
,
где lA - размер раскрыва приемо-передающей антенны;
lР - максимальный линейный размер пассивного ретранслятора.
Параметр lP определяется в соответствии с требуемой величиной результирующей площади разрешения по угловым координатам (δθ, δε). Например, при использовании в качестве пассивного ретранслятора плоской ромбической пластины ее максимальный линейный размер определяется по формуле
 .
.
Расстояние D2 между пассивным ретранслятором и исследуемым объектом выбирается из условия промежуточной зоны пассивного ретранслятора

Измерения по предлагаемому способу проводят в три этапа.
На первом этапе проводят планирование измерений, заключающееся в определении требуемых ракурсов визирования исследуемого объекта в горизонтальной и вертикальной плоскостях, выборе требуемых параметров линейного разрешения по угловым координатам и соответствующей подготовке аппаратуры измерений.
На втором этапе проводят измерения с выдерживанием параметров, определенных на первом этапе. При этом осуществляется наведение приемо-передающей антенны и зеркальное наведение пассивного ретранслятора на приемо-передающую антенну и исследуемый объект соответственно. Исследуемый объект и калибровочный отражатель поочередно устанавливают на поворотном устройстве. Осуществляют непрерывное равномерное перемещение главного лепестка бистатической индикатрисы рассеяния пассивного ретранслятора вдоль видимой проекции неподвижного исследуемого объекта путем равномерного движения пассивного ретранслятора вдоль оптической оси приемо-передающей антенны (см. фиг.1). При этом производят регистрацию, например на шлейфовый осциллограф, уровней мощности ортогонально поляризованных компонент сигналов, рассеянных объектом и переотраженных пассивным ретранслятором в направлении приемо-передающей антенны, на ее выходе в зависимости от линейного перемещения ретранслятора вдоль видимой проекции исследуемого объекта и фиксированного ракурса объекта. Значения углового положения объекта относительно ретранслятора и линейного перемещения последнего определяют с помощью соответствующих датчиков, например резисторных.
На третьем этапе производят обработку полученных результатов измерений, заключающуюся в привязке уровней сигнала, отраженного от исследуемого объекта, к уровню сигнала отраженного от калибровочного отражателя с известной ЭПР и их привязке к величине линейного перемещения пассивного ретранслятора и угловому положению исследуемого объекта.
Радиолокационный измерительный комплекс для измерения ЭПР объектов содержит генератор синхроимпульсов 1, выход которого соединен с импульсным передатчиком 2, выход которого соединен с волноводным переключателем 3, который по каналам 3.1 и 3.2 через соответствующий антенный переключатель (4.1, 4.2) и поляризационный ращепитель 5 соединен с приемо-передающей антенной 6, в режиме измерений интегральной ЭПР, связанной по радиолокационному каналу (облучающий сигнал - отраженный сигнал) с исследуемым объектом 7.1 или калибровочным отражателем 7.2, выход приемо-передающей антенны через поляризационный ращепитель 5, антенные переключатели 4.1, 4.2 соединен с двухканальным приемным устройством совпадающей и ортогональной поляризаций 8, выходы которого соединены с регистрирующим устройством 9, второй выход генератора синхроимпульсов 1 соединен со входом селектора двухканального приемника 8 для обеспечения стробирования полезного, отраженного от объекта 7.1 или калибровочного отражателя 7.2 сигнала по дальности, а выход датчика углового положения исследуемого объекта с устройством вращения 10 соединен со входом регистрирующего устройства 9, а для режима измерений дифференциальной ЭПР объекта содержит пассивный ретранслятор 11, связанный по радиолокационному облучению и приему (радиолокационному каналу) с приемо-передающей антенной 6 и исследуемым объектом 7.1 или калибровочным отражателем 7.2, и обладающим низким (менее -30 дБ) уровнем боковых лепестков бистатической индикатрисы рассеяния, выполненный в виде плоской ромбической пластины 12, размеры которой обеспечивают требуемую разрешающую способность комплекса в вертикальной и горизонтальной плоскостях, установленной на малоотражающей мачте 13, снабженной механическим устройством наведения плоской ромбической пластины пассивного ретранслятора 12 по угловым координатам и перемещения в вертикальной плоскости 14 в пределах высоты малоотражающей мачты 13, установленной на горизонтальных направляющих 15, размещенных на поверхности земли и ориентированных вдоль оптической оси приемо-передающей антенны 6, и снабженной устройством ее равномерного перемещения по направляющим с датчиком линейного перемещения 16, выход которого соединен со входом регистрирующего устройства 9.
Механическое устройство 14 наведения плоской ромбической пластины пассивного ретранслятора по угловым координатам и его перемещения в вертикальной плоскости может быть выполнено, например, в виде червячной либо винтовой передачи с ручным приводом, обеспечивающим фиксацию выбранного положения пластины. Устройство равномерного движения мачты 16 по направляющим 15 может быть выполнено, например, в виде ручного тросового привода или в виде реверсивного электродвигателя с редуктором.
Устройство вращения исследуемого объекта 7.1 или калибровочного отражателя 7.2 содержит поворотную платформу 17, установленную на уровне поверхности земли 18 и сопряженную с датчиком углового положения объекта 10, например, резисторного типа.
Радиолокационный измерительный комплекс работает следующим образом.
При измерении интегральной ЭПР объекта импульсы синхронизации комплекса с генератора синхроимпульсов 1 приемопередатчика поступают на запуск импульсного передатчика 2 и одновременно, в виде «строб-импульса», в двухканальный приемник 8. С выхода передатчика 2 импульсы высокочастотных колебаний через волноводный переключатель 3 вертикальной или горизонтальной поляризации, антенные переключатели 4.1 и 4.2 и поляризационный ращепитель 5 излучаются приемо-передающей антенной 6 в направлении исследуемого объекта 7.1 или калибровочного отражателя 7.2. Излученный приемо-передающей антенной 6 зондирующий импульс отражается исследуемым объектом в направлении той же антенны 6, и через поляризационный ращепитель 5 и антенные переключатели 4.1, 4.2 сигналы ортогональных поляризаций поступают на входы смесителей двухканального приемного устройства 8, где, после выделения сигналов промежуточной частоты, происходит их усиление, детектирование и стробирование «строб-импульсом», поступающим от генератора синхроимпульсов 1, затем они поступают на вход регистрирующего устройства 9, например светолучевого (шлейфового) осциллографа типа Н-115. Вращение объекта осуществляется в горизонтальной плоскости с помощью поворотной платформы 17, установленной на уровне поверхности земли 18, сигналы с датчика углового положения объекта 10 поступают на вход регистрирующего устройства 9 в реальном масштабе времени.
При измерении дифференциальной ЭПР объекта наведение приемо-передающей антенны 6 осуществляется в направлении пассивного ретранслятора 11. Наведение приемопередающей антенны 6 на пассивный ретранслятор производится по максимуму отраженного сигнала. Излученный приемо-передающей антенной зондирующий импульс зеркально переотражается в направлении исследуемого объекта с помощью плоской ромбической пластины 12 пассивного ретранслятора, установленной на малоотражающей мачте 13, например металлической ферме, покрытой шиловидным радиопоглощающим материалом, имеющим коэффициент отражения менее 6%. Наведение пассивного ретранслятора в системе «антенна - ретранслятор - объект» производится с помощью механического устройства 14 (наведения по угловым координатам и его перемещения в вертикальной плоскости) по максимуму сигнала на выходе антенны, отраженного от калибровочного отражателя, установленного в месте размещения исследуемого объекта, на одном из краев его видимой проекции, соответствующем исходному положению пассивного ретранслятора на горизонтальных направляющих 15. Исследуемый объект 7.1 и калибровочный отражатель 7.2 поочередно устанавливаются на поворотной платформе 17, сопряженной с датчиком 10 текущего углового положения исследуемого объекта, либо на выбранном участке земной поверхности 18. Отраженные от исследуемого объекта 7.1 или калибровочного отражателя 7.2 сигналы зеркально переотражаются плоской пластиной ретранслятора в направлении приемо-передающей антенны 6. С выхода приемо-передающей антенны 6 совпадающая и кроссовая компоненты отраженного сигнала разделяются на соответствующие волноводные каналы с помощью поляризационного ращепителя 5 и через антенные переключатели 4.1 и 4.2 поступают на входы смесителей двухканального приемного устройства 8, где, после выделения сигналов промежуточной частоты, происходит их усиление, детектирование и стробирование «строб-импульсом», поступающим от генератора синхроимпульсов 1. С выходов каналов совпадающей и кроссовой поляризации двухканального приемника 8 низкочастотные импульсные сигналы (или их огибающие) поступают на входы регистрирующего устройства 9. В процессе измерений малоотражающую мачту с плоским пассивным ретранслятором равномерно перемещают по горизонтальным направляющим 15, например железнодорожным рельсам, с помощью устройства 16 движения мачты, оборудованного датчиком линейного перемещения, например резистивным, с выхода которого сигналы линейного перемещения поступают на вход регистрирующего устройства 9 одновременно с переотраженными пассивным ретранслятором сигналами. Угловое положение исследуемого объекта при этом фиксировано. Контроль за работой комплекса осуществляется операторами с помощью, например, осциллографов-индикаторов. Обработка результатов измерений производится по выходным данным устройства регистрации 9.
Работоспособность предложенного способа и комплекса для его реализации подтверждена многократными измерениями, для чего использовались измерительные РЛС с рабочей длиной волны 0,8 и 3,2 см и длительностью зондирующих импульсов 0,1 и 0,2 мкс, в качестве ретранслятора - плоская ромбическая дюралюминиевая пластина размером диагоналей 1,5×1,5 м, установленная на металлической ферме высотой 3 метра, укрытой накидкой из радиопоглощающего материала «Ворс», в качестве исследуемого объекта - автомобили ЗИЛ-157, КАМА3-4310, самолет МиГ-23МЛ. Результаты опытных проверок многократно подтвердили техническую реализуемость предлагаемого способа, а также работоспособность, правильность функционирования и высокую точность измерений реализующего его радиолокационного измерительного комплекса. Доработка известного комплекса до предлагаемого не вызывает технических затруднений, так как все новые узлы и системы выполнены на существующей элементной базе, и не требует больших материальных затрат.
Таким образом, по сравнению с известным способом измерения интегральной ЭПР объектов и радиолокационным комплексом для его осуществления - прототипом - достигается расширение функциональных возможностей измерений в части выявления «блестящих точек» и определения их местоположения в составе исследуемого объекта сложной формы независимо от его массогабаритных размеров, измерения их ЭПР и обеспечения высокой точности указанных измерений с помощью импульсных РЛС, использующих узкополосные зондирующие сигналы путем повышения разрешающей способности РИК по угловым координатам без специальных доработок антенн и поворотных устройств измерительного комплекса и возможности его использования как для измерения интегральных РЛХ, так и дифференциальных РЛХ объектов, обеспечения возможности перемещения главного лепестка бистатической индикатрисы рассеяния плоского пассивного ретранслятора вдоль исследуемого объекта и привязки мощности принимаемых сигналов к длине и угловому положению объекта в масштабе реального времени.
Изобретение относится к области измерений радиолокационных характеристик объектов. Техническим результатом является расширение функциональных возможностей измерений стандартизованными радиолокационными измерительными комплексами (РИК) полигонного типа за счет измерения как интегральных, так и дифференциальных ЭПР исследуемых объектов, который достигается тем, что в РИК использован пассивный ретранслятор, связанный по радиолокационному каналу с приемо-передающей антенной и исследуемым объектом или калибровочным отражателем, с низким уровнем боковых лепестков бистатической индикатрисы рассеяния, размеры которого обеспечивают требуемую разрешающую способность комплекса в вертикальной и горизонтальной плоскостях. В способе измерения ЭФР исследуемых объектов согласно изобретению излученный приемо-передающей антенной сигнал зеркально переотражают в направлении исследуемого объекта, переотражают ортогонально поляризованные компоненты рассеянного исследуемым объектом сигнала с помощью того же ретранслятора в направлении приемо-передающей антенны, принимают, измеряют их мощность и сравнивают с мощностью сигналов соответствующей поляризации, отраженных от калибровочных отражателей с известной ЭПР. 2 н.п. ф-лы, 3 ил.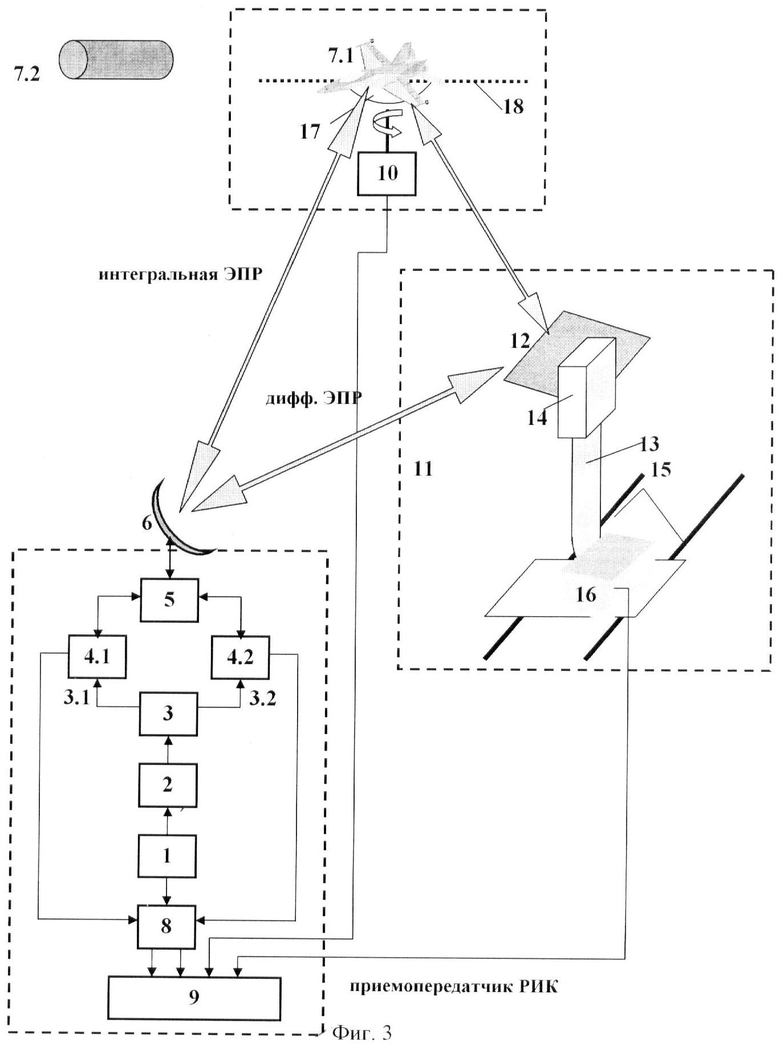
1. Способ измерения эффективной площади рассеяния (ЭПР) объектов, включающий облучение исследуемого объекта импульсным узкополосным сигналом длиной волны λ фиксированной мощности и фиксированной поляризации линейного базиса, излученным приемопередатчиком радиолокационного измерительного комплекса (РИК) через приемопередающую антенну с размером раскрыва lA, приеме ортогонально поляризованных компонент рассеянного исследуемым объектом сигнала с помощью той же антенны, измерение и сравнение их мощности с мощностью сигналов соответствующей поляризации, отраженных от калибровочного отражателя с известной ЭПР, отличающийся тем, что дополнительно излученный приемопередающей антенной сигнал зеркально переотражают в направлении исследуемого объекта с помощью плоского пассивного ретранслятора с низким (менее -30 дБ) уровнем боковых лепестков бистатической индикатрисы рассеяния, геометрические размеры (lp) которого выбирают в соответствии с требуемой линейной разрешающей способностью по угловым координатам в вертикальной (δε) и горизонтальной (δθ) плоскостях, переотражают ортогонально поляризованные компоненты рассеянного исследуемым объектом сигнала с помощью того же ретранслятора в направлении приемопередающей антенны, принимают, измеряют их мощность и сравнивают с мощностью сигналов соответствующей поляризации, отраженных от калибровочных отражателей с известной ЭПР, при этом ретранслятор размещают в дальней зоне приемопередающей антенны на дальности , а исследуемый объект устанавливают неподвижно под требуемым ракурсом в промежуточной зоне ретранслятора на дальности  , и в соответствии с линейным размером видимой проекции исследуемого объекта, кажущаяся плоскость которой ориентирована нормально направлению падения электромагнитной волны от пассивного ретранслятора, последний равномерно перемещают в горизонтальной плоскости вдоль оптической оси приемопередающей антенны в пределах разрешающей способности приемопередатчика РИК по дальности для фиксированных значений угла визирования исследуемого объекта в вертикальной плоскости, а при обработке результатов измерений учитывают величину линейного перемещения пассивного ретранслятора вдоль исследуемого объекта.
, и в соответствии с линейным размером видимой проекции исследуемого объекта, кажущаяся плоскость которой ориентирована нормально направлению падения электромагнитной волны от пассивного ретранслятора, последний равномерно перемещают в горизонтальной плоскости вдоль оптической оси приемопередающей антенны в пределах разрешающей способности приемопередатчика РИК по дальности для фиксированных значений угла визирования исследуемого объекта в вертикальной плоскости, а при обработке результатов измерений учитывают величину линейного перемещения пассивного ретранслятора вдоль исследуемого объекта.
2. Радиолокационный измерительный комплекс для измерения ЭПР исследуемых объектов, содержащий генератор синхроимпульсов, один выход которого соединен с импульсным передатчиком, выход которого соединен с волноводным переключателем, который через антенный коммутатор поляризации излучения соединен с приемопередающей антенной, связанной по радиолокационному каналу (облучающий сигнал - отраженный сигнал) с исследуемым объектом или калибровочным отражателем, выход приемопередающей антенны через поляризационный расщепитель и тот же волноводный переключатель соединен с двухканальным приемным устройством совпадающей и ортогональной поляризации, соответствующие выходы которого соединены с регистрирующим устройством, второй выход генератора синхроимпульсов соединен с приемником для обеспечения стробирования полезного отраженного от объекта или калибровочного отражателя сигнала по дальности, а выход датчика углового положения исследуемого объекта, установленного на устройстве вращения, соединен со входом регистрирующего устройства, отличающийся тем, что в него введен пассивный ретранслятор, связанный по радиолокационному каналу с приемопередающей антенной и исследуемым объектом или калибровочным отражателем, с низким уровнем боковых лепестков бистатической индикатрисы рассеяния, размеры которого обеспечивают требуемую разрешающую способность комплекса в вертикальной и горизонтальной плоскостях и который состоит из плоской пластины, жестко связанной с устройством наведения пассивного ретранслятора по угловым координатам и перемещения в вертикальной плоскости и установленные на малоотражающей мачте, которая установлена на устройстве равномерного перемещения пассивного ретранслятора по горизонтальным направляющим, ориентированным вдоль оптической оси приемопередающей антенны, с датчиком линейного перемещения, выход которого соединен со входом регистрирующего устройства.
| МАЙЗЕЛЬС Е.И., ТОРГОВАНОВ В.В | |||
| Измерение характеристик рассеяния радиолокационных целей, - М.: Советское радио, 1972, с.166-175 | |||
| Способ измерения эффективной площади рассеяния объекта | 1988 |
|
SU1640658A1 |
| RU 2066050 C1, 27.08.1996 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТОВ | 2003 |
|
RU2244939C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2217774C2 |
| US 4352167 A, 28.09.1982 | |||
| US 5232182 A, 03.08.1982. | |||

