Способ определения местоположения цели относится к радиотехнике (к гидроакустике), в частности, к способам бистатического определения местоположения цели. Может использоваться в средствах бистатической радиолокации (гидролокации) для измерения направления на цель и расстояния до нее.
Известен способ-аналог полуактивного бистатического определения местоположения цели (В.Е.Аверьянов. Разнесенные радиолокационные станции и системы. Минск: Наука и техника, 1978, с. 31-32), заключающийся в последовательном приеме зондирующего сигнала (ЗС) и эхо-сигнала (ЭС) цели бортовым приемокоординатным устройством (ПКУ), которое находится в диаграмме направленности антенны (ДНА) облучающего цель передающего устройства (ПдУ) (на прямой «ПдУ-цель»), определении направления на цель приемной антенной и вычислении расстояния до нее по разности моментов приема ЗС и ЭС.
Недостаток способа заключается в невозможности обзора пространства передающей антенной и в необходимости нахождения цели в зоне прямой видимости ПКУ, а ПКУ - на прямой линии «ПдУ-цель». Невыполнение хотя бы одного из этих условий приводит к невозможности определения местоположения цели.
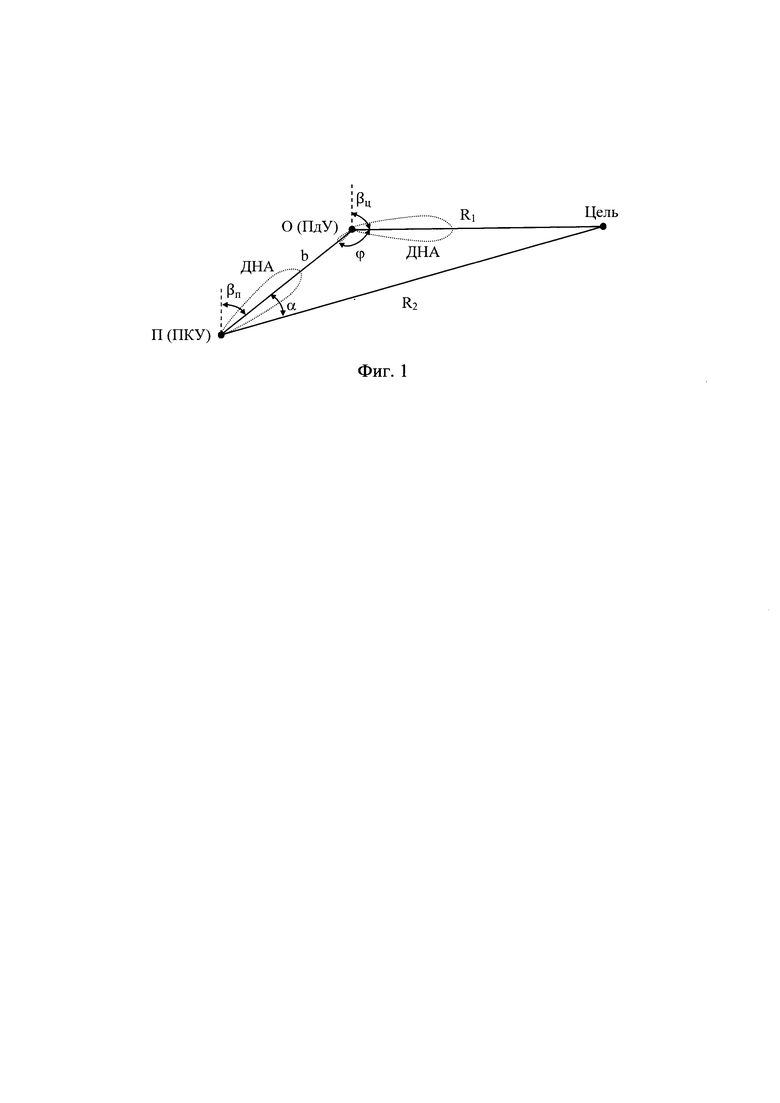
Из известных способов наиболее близким к заявляемому изобретению (прототип) является способ бистатического определения местоположения цели (В.Е. Аверьянов. Разнесенные радиолокационные станции и системы. Минск: Наука и техника, 1978, с. 33-34, 123), в котором ПдУ, местоположение носителя которого известно, излучает ЗС в направлении цели и по боковому лепестку ДНА (или дополнительной антенной) в направлении ПКУ, в котором многоканальным корреляционным (Белоцерковский Г.Б. Основы радиолокации и радиолокационные устройства. М.: «Сов.радио», 1975, с. 53) или корреляционно-доплеровским (Авиационные радиолокационные комплексы и системы. П.И. Дудник, Г.С. Кондратенков, Б.Г. Татарский, А.Р. Ильчук, А.А. Герасимов. Под ред. П.И. Дудника. М: Изд. ВВИА им. проф. Н.Е. Жуковского. 2006. 112-115, 548-550) методом обнаруживают ЭС (опорным сигналом является принятый ранее ЗС), фиксируют направление прихода ЭС (направление на цель), определяют разность времен прихода в ПКУ ЗС и ЭС, по которой и по заранее известным (вычисляемым на текущий момент времени) величине базы (расстояние «ПдУ - ПКУ») и углу между базой и направлением на цель относительно ПКУ вычисляют дальность до наблюдаемой цели относительно ПКУ путем решения треугольника, изображенного на фигуре 1, где О - местоположение носителя ПдУ, П - местоположение ПКУ.
Способ-прототип имеет существенные ограничения по применению: во-первых, цель должна находиться в зоне прямой видимости ПКУ; во-вторых, если цель находится в зоне прямой видимости ПКУ, то при широкой ДНА ПКУ значительно снижается дальность обнаружения цели, а при узкой ДНА ПКУ значительно увеличивается время обзора пространства из-за необходимости сканирования приемной антенной вдоль линии распространения ЗС (вдоль ДНА ПдУ).
Задачей предлагаемого изобретения-способа (техническим результатом) является определение местоположения цели при отсутствии приема эхо-сигнала в направлении на цель (например, отсутствует прямая видимость на линии «ПКУ-цель») и исключение процесса сканирования пространства узконаправленной антенной ПКУ в интересах сокращения времени обзора пространства.
Указанная задача (технический результат) достигается тем, что в известном способе, основанном на обнаружении в ПКУ ЗС и ЭС, измерении разности моментов приема ЗС от ПдУ с известными координатами и ЭС цели с неизвестными координатами, согласно изобретению, направляют узконаправленную антенну ПКУ на носитель ПдУ, вычисляют угол между базой и линией «ПдУ-цель», вычисляют параметры двух линий положения - окружности и прямой (R2 и α), по пересечению которых определяют местоположение цели.
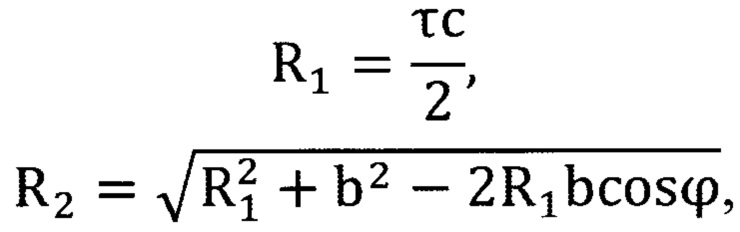
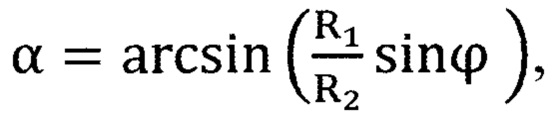
Сущность способа состоит в следующем. Цель, местоположение которой необходимо измерить, облучают импульсным зондирующим сигналом, формируемом в ПдУ и излучаемом передающей антенной в направлении на цель (например, аналогично обзорным РЛС, расположенным на вышке или на воздушном носителе). Вследствие наличия у передающей антенны боковых лепестков диаграммы направленности ЗС также излучается в направлении ПКУ, антенна которого направлена на ПдУ, где он после приема антенной и обработки приемником подается в вычислительное устройство (ВУ). В ВУ после приема ЗС, который используется в качестве «опорного» для обнаружения ЭС, начинается отсчет времени. Кроме этого в ВУ заранее вводятся величины: базы, азимута ПДУ относительно ПКУ и азимута цели (например, текущего углового положения передающей антенны, реализующей обзор пространства с постоянным периодом). В ПдУ отсутствует активный ретранслятор сигналов, поэтому происходит пассивное переотражение (пассивная ретрансляция) эхо-сигнала цели от носителя ПдУ в направлении ПКУ, где после приема антенной и обработки приемником подается в ВУ, в котором обнаруживается корреляционным или корреляционно-фильтровым методом. После обнаружения в ПКУ эхо-сигнала, переотраженного носителем ПдУ, заканчивается отсчет времени и, тем самым, определяется разность моментов приема ЗС и ЭС. По азимуту цели (угловому положению передающей антенны на момент обнаружения ЭС) и азимуту ПДУ относительно ПКУ вычисляют угол между базой и линией «ПдУ-цель», по разности моментов приема ЗС и ЭС -расстояние от ПдУ до цели, по которым с использованием величины базы рассчитываются расстояние от ПКУ до цели и ее угловое положение относительно базы (относительный пеленг) по формулам:




где ϕ - угол между базой и линией «ПдУ - цель»; |•| - знак модуля; βц - азимут цели относительно ПдУ; βп - азимут носителя ПдУ относительно ПКУ; R1-расстояние от ПдУ до цели; τ - разность моментов приема в ПКУ зондирующего сигнала и эхо-сигнала цели, переотраженного носителем ПдУ; с - скорость распространения электромагнитной волны в вакууме (акустической волны в среде); R2 - расстояние от ПКУ до цели (радиус окружности); b - база; α - угловое положение цели относительно базы.
Сравнительный анализ с прототипом и известными способами определения местоположения цели при бистатической радиолокации (гидролокации) позволяет сделать вывод о том, что заявляемый способ отличается наличием новых операций: установка узконаправленной антенны ПКУ в направление на носитель ПдУ, вычисление угла между базой и линией «ПдУ-цель», обнаружение в ПКУ сигнала, отраженного не непосредственно целью, а после его переотражения носителем ПдУ, вычисление параметров двух линий положения - радиуса окружности R2 и угла цели относительно базы (относительного пеленга цели) α, определяющих местоположение цели относительно ПКУ.
Таким образом, изобретение соответствует критерию «Новизна», поскольку из общедоступных сведений неизвестны способы, позволяющие определить местоположение цели при отсутствии прямой видимости цели на приемной позиции и сканирования узконаправленной приемной антенной бистатической системы.
Изобретение для специалистов не следует явным образом из уровня техники и соответствуют критерию «Изобретательский уровень».
Из уравнений радиолокации [Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, с. 116] следует, что к коэффициенту усиления приемной антенны ПКУ предъявляются следующие требования:

где Pmin - чувствительность приемника ПКУ; q0 - отношение сигнал/шум, требуемое для достижения заданных характеристик обнаружения; Р - импульсная мощность ПдУ; So - площадь передающей антенны; σбис - бистатическая эффективная площадь рассеяния (ЭПР) [В.Е.Аверьянов. Разнесенные радиолокационные станции и системы. Минск: Наука и техника, 1978, с. 21] носителя ПдУ; σц - ЭПР цели; αΣ - суммарные потери сигналов на трассе распространения и в приемном канале ПКУ.
Соответствие изобретения критерию «Промышленная применимость» определим на основе анализа возможности реализации приемной антенны ПКУ при характеристиках технически реализуемых стандартных радиоэлектронных устройств и средств, и для практических условий функционирования радиолокационных станций обнаружения воздушных целей: R1=9⋅104 м; b=2⋅102 м; Pmin=10-16 Вт; q0=5; Р=2⋅105 Вт; So=15 м2; σбис=103 м2; σц=1 м2; αΣ=0,5. Тогда в соответствие с выражением (5) получим Gп=1749,6. Такой коэффициент усиления приемной антенны при коэффициенте использования ее площади 0,8 и длине волны 0,12 м обеспечивается при геометрической площади антенны 2,5 м2, что практически реализуемо.
На основе уравнения радиолокации с активным ответом [Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, с. 116] можно показать, что дальность обнаружения ПКУ зондирующего сигнала, излучаемого боковым лепестком диаграммы направленности передающей антенны с уровнем gбл, определяется по формуле:

Из формулы (6) следует, что даже при gбл =- 60дБ, для вышеуказанных характеристик ПдУ и ПКУ, дальность D составляет сотни тысяч километров.
Таким образом, изобретение может использоваться в разнесенных радиолокационных (гидроакустических) станциях для определения местоположения целей и соответствует критерию «Промышленная применимость».
На фигуре 1 представлена схема взаимного расположения элементов полуактивно-пассивной бистатической системы определения местоположения цели.
Таким образом, сформулированная задача (технический результат) определения местоположения цели при отсутствии прямой видимости на линии «ПКУ-цель» и исключение процесса сканирования пространства узконаправленной антенной ПКУ, при известных местоположении ПдУ (b и βп) и азимуте цели βц, решается с помощью предлагаемого способа за счет использования параметров двух линий положения - окружности радиусом R2 и угла цели α относительно базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| Способ локации целей | 2023 |
|
RU2814430C1 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С НЕЛИНЕЙНЫМИ ЭЛЕКТРИЧЕСКИМИ СВОЙСТВАМИ | 2011 |
|
RU2507534C2 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ЦЕЛИ В ДВУХПОЗИЦИОННОМ КОМПЛЕКСЕ ПАССИВНОЙ ЛОКАЦИИ С ИСПОЛЬЗОВАНИЕМ ЗОНДИРУЮЩИХ СИГНАЛОВ ИОНОСФЕРНОЙ ЗАГОРИЗОНТНОЙ РЛС | 2020 |
|
RU2737279C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ КЛАССОВ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ ДЛЯ МНОГОДИАПАЗОННОГО РАЗНЕСЕННОГО РАДИОЛОКАЦИОННОГО КОМПЛЕКСА С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 2020 |
|
RU2741057C1 |
Изобретение относится к области радиотехники (гидроакустики), в частности к способам бистатического определения местоположения цели, и может использоваться в средствах бистатической радиолокации (гидролокации) для измерения направления на цель и расстояния до нее. Достигаемый технический результат - определение местоположения цели при отсутствии приема эхо-сигнала в направлении на цель (при отсутствии прямой видимости цели на приемной позиции) и исключение процесса сканирования пространства узконаправленной антенной приемокоординатного устройства (ПКУ) в интересах сокращения времени поиска цели. Указанный результат достигается тем, что узконаправленную антенну ПКУ направляют на носитель передающего устройства (ПдУ) с известными координатами и угловым положением передающей антенны, вычисляют угол между линиями «ПдУ-цель» и «ПдУ-ПКУ», в ПКУ обнаруживают зондирующий сигнал (ЗС) и эхо-сигнал (ЭС) цели после его переотражения носителем ПдУ, измеряют разность моментов приема ЗС и ЭС, определяют местоположение цели относительно ПКУ по параметрам двух вычисленных линий положения -окружности и прямой. Учитывая, что антенна ПКУ направлена на носитель ПдУ, не требуется непосредственное наблюдение самой цели в ПКУ и сканирование пространства узконаправленной антенной для ее поиска, что при одной приемной позиции приводит к уменьшению времени обзора пространства. 1 ил.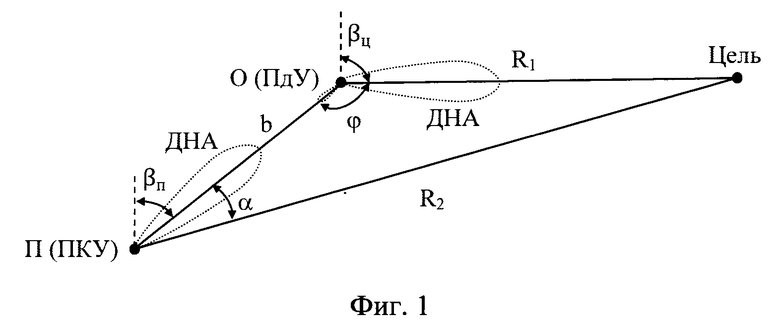
Способ полуактивно-пассивного бистатического определения местоположения цели при известных величинах базы (расстояния от передающего устройства (ПдУ) до приемокоординатного устройства (ПКУ)), азимута ПДУ относительно ПКУ и азимута цели относительно ПДУ, заключающийся в последовательном измерении в ПКУ момента приема зондирующего сигнала (ЗС), обнаружении корреляционным методом эхо-сигнала (ЭС) цели, вычислении в ПКУ разности моментов приема ЗС и ЭС, отличающийся тем, что направляют узконаправленную антенну ПКУ на носитель ПдУ, вычисляют угол между базой и линией «ПдУ-цель», определяют местоположение цели относительно ПКУ по параметрам двух линий положения - радиусу окружности и углу цели относительно базы по формулам:
ϕ=|βп-180°-βц|,
где ϕ - угол между базой и линией «ПдУ - цель»;
|•| - знак модуля;
βц - азимут цели относительно ПдУ;
βп - азимут носителя ПдУ относительно ПКУ;
R1 - расстояние от ПдУ до цели;
τ - разность моментов приема в ПКУ зондирующего сигнала и эхо-сигнала цели, переотраженного носителем ПдУ;
с - скорость распространения электромагнитной волны в вакууме (акустической волны в среде);
R2 - расстояние от ПКУ до цели (радиус окружности);
b - база;
α - угол цели относительно базы.
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн | 2016 |
|
RU2669702C2 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПРИ ПАССИВНОЙ БИСТАТИЧЕСКОЙ РАДИОЛОКАЦИИ | 2001 |
|
RU2196342C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| ПРИБОР ДЛЯ ПЕРЕЗАПИСИ КРИВЫХ | 0 |
|
SU167306A1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОСФОРСОДЕРЖАЩЕГО ДИСАЗОКРАСИТЕЛЯ | 1972 |
|
SU429080A1 |
| CN 105182300 A, 23.12.2015 | |||
| CN 104076348 A, 01.10.2014 | |||
| JP 2001183452 A, 06.07.2001. | |||

