Изобретение относится к области радиолокации и может быть использовано при калибровке радиолокационных станций (РЛС), работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, по величине эффективной поверхности рассеяния (ЭПР) при проведении динамических измерений ЭПР баллистических и космических объектов [1, стр.144], [2].
Известен способ калибровки радиолокационной станции, который заключается в следующем. Запускают искусственный спутник Земли (ИСЗ) сферической формы, облучают его сигналами калибруемой РЛС, принимают и измеряют амплитуды отраженных от ИСЗ сигналов, которые используют как соответствующие эталонному значению ЭПР отражателя [1, стр.204-213].
Недостатком данного способа является невозможность его использования для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, так как для таких радиолокаторов отражатель сферической формы невидим [3, стр.103].
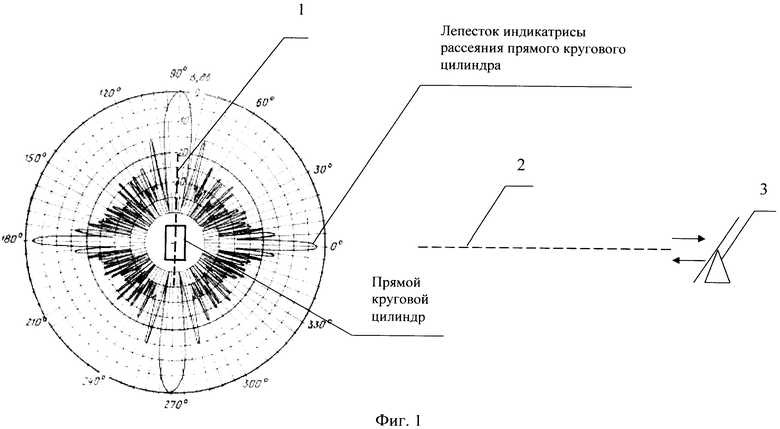
Наиболее близким аналогом изобретения является способ, в котором в качестве эталонного рассеивателя используется прямой круговой цилиндр. Такой цилиндр выводится на околоземную орбиту, и ему задается «кувыркательное» движение таким образом, чтобы его продольная ось 1 была ориентирована перпендикулярно линии визирования 2 радиолокационной станции 3 (см. фиг.1). Облучают цилиндр сигналами калибруемой РЛС, принимают отраженные сигналы и проводят измерения амплитуд отраженных сигналов при ориентации прямого кругового цилиндра вблизи от этого направления, которые могут позволить уточнить калибровку радиолокационной станции [1, стр.206-213]. Однако такой способ имеет невысокую точность, так как в направлении, нормальном оси цилиндра, прямой круговой цилиндр обладает узким лепестком индикатрисы рассеяния [1, стр.19-20], [3, стр.235]. При этом сектор углов, используемый для калибровки РЛС по величине ЭПР, вблизи максимума лепестка индикатрисы рассеяния прямого кругового цилиндра в этом направлении еще более узкий. Любое незначительное отклонение оси прямого кругового цилиндра от нормального по отношению к линии визирования РЛС направления влечет за собой уменьшение мощности и, соответственно, амплитуды сигналов, отраженных от прямого кругового цилиндра, что приводит к ошибкам калибровки РЛС по величине ЭПР. Так, ошибка ориентации направления, нормального оси прямого кругового цилиндра диаметром 1,2 м и длиной 3 м, относительно линии визирования РЛС на 1,5 градуса в дециметровом диапазоне работы РЛС приводит к ошибкам калибровки РЛС по величине ЭПР на 5 дБ [1, стр.211]. С уменьшением длины волны РЛС (в сантиметровом диапазоне при тех же размерах цилиндра) ширина основного лепестка индикатрисы рассеяния в направлении, перпендикулярном оси прямого кругового цилиндра, значительно сужается [1, стр.223]. И, следовательно, ошибка ориентации продольной оси прямого кругового цилиндра в направлении, перпендикулярном линии визирования РЛС, приводит к еще более значительным ошибкам калибровки РЛС по величине ЭПР.
При этом сам сеанс калибровки очень непродолжителен. Например, при периоде «кувыркания» прямого кругового цилиндра 10 минут (600 секунд) [1, стр.213] время, в течение которого можно проводить сеанс калибровки, т.е. вблизи направления ориентации оси цилиндра перпендикулярно направлению на калибруемую РЛС, в дециметровом диапазоне длин волн составит менее двух секунд, а в сантиметровом - менее одной секунды. Такой временной интервал сеанса калибровки не позволяет провести статистическую обработку результатов измерений, что также снижает точность калибровки РЛС по величине ЭПР.
Кроме того, использовать прямой круговой цилиндр в качестве эталона не всегда возможно, так как такой эталон имеет значительные размеры и вес [4, стр.37], что не позволяет осуществлять его транспортировку на околоземную орбиту попутными запусками или осуществлять запуск по баллистической траектории вместе с исследуемыми объектами [1, стр.211].
Технический результат предлагаемого изобретения заключается в повышении точности калибровки РЛС по величине ЭПР за счет исключения ошибки, вызванной отклонением максимума ЭПР эталонного отражателя от линии визирования РЛС.
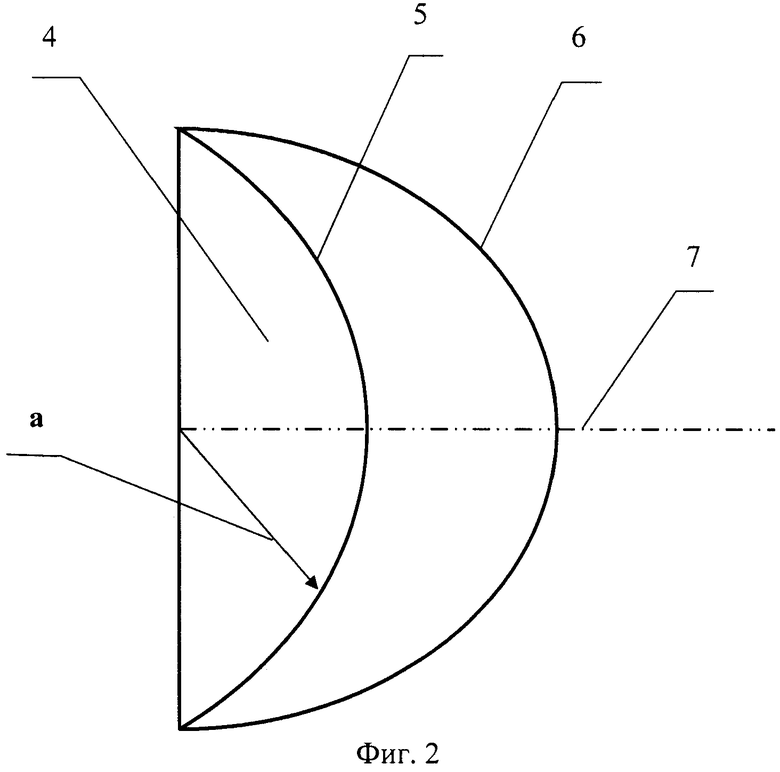
Указанный технический результат достигается тем, что в способе калибровки РЛС по величине ЭПР при динамических измерениях радиолокационных характеристик рассеяния баллистических и космических объектов, включающем в себя: запуск отражателя с известной величиной ЭПР с помощью ракеты-носителя (РН), облучение отражателя сигналами калибруемой РЛС, прием и измерение амплитуды отраженных сигналов от отражателя находящегося в дальней зоне антенны РЛС, - новым является то, что для калибровки РЛС, работающей на волнах круговой поляризации при параллельном приеме отраженных сигналов, по величине ЭПР при проведении динамических измерений эффективной поверхности рассеяния баллистических и космических объектов на высоту более 100 километров с помощью ракеты-носителя транспортируют в качестве эталона ЭПР уголковый отражатель 4, выполненный в виде двух граней из плоских радиоотражающих полудисков 5 и 6, развернутых под фиксированным углом, значения которого лежат в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/a,
λ - длина волны калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя,
(см. фиг.2).
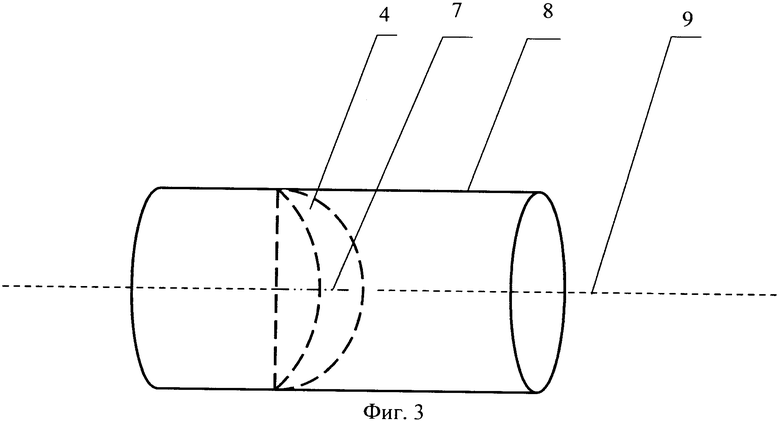
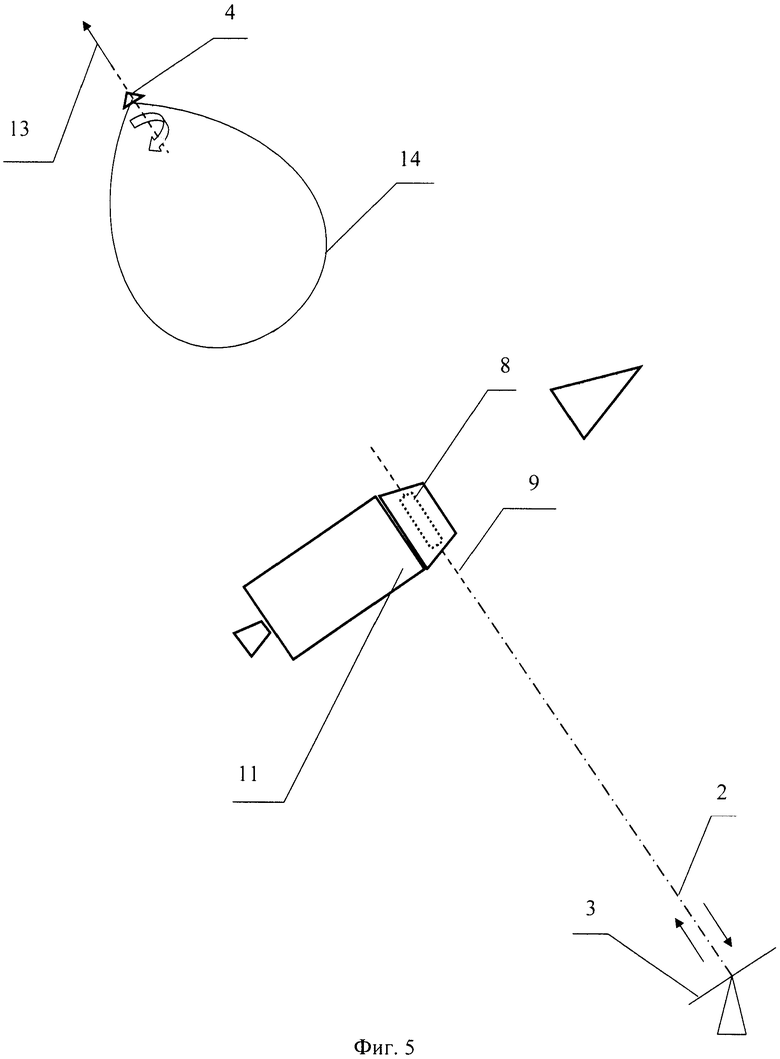
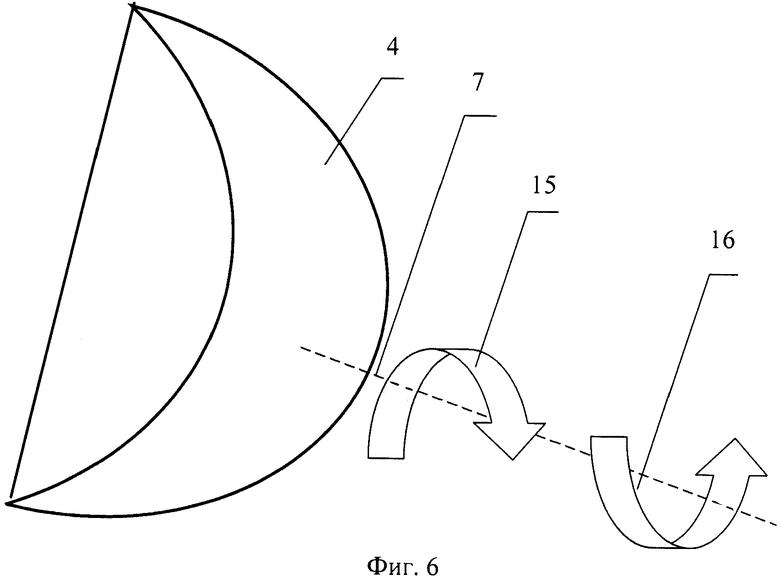
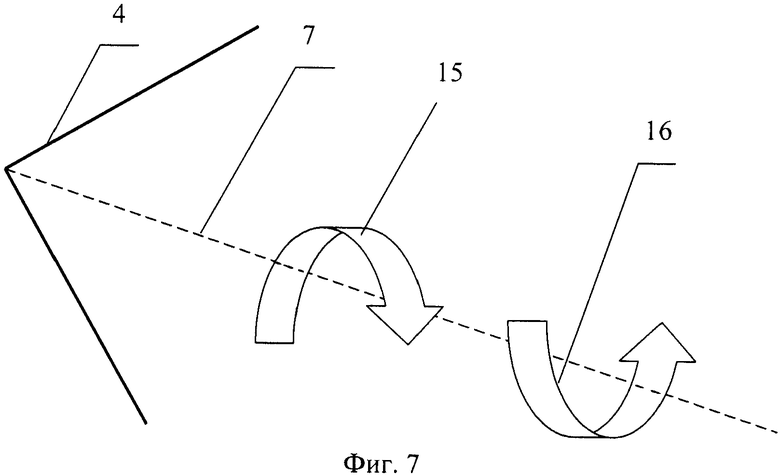
Предварительно, до запуска РН, уголковый отражатель 4 помещают в направляющий цилиндрический контейнер 8, при этом продольную ось цилиндрического контейнера 9 совмещают с биссектрисой угла 7 между гранями УО в плоскости, перпендикулярной середине ребра УО (см. фиг.3). Перед отделением УО от ракеты-носителя помощью системы управления РН по заданной программе тангажа осуществляют программный разворот (ориентацию) последней ступени ракеты-носителя 11 с направляющим контейнером 8 относительно РЛС до совмещения продольной оси контейнера 9, совпадающей с биссектрисой угла между гранями УО в плоскости, перпендикулярной середине ребра УО, с линией визирования 2 калибруемой РЛС. По сигналу от системы управления РН уголковый отражатель 4 отделяют от последней ступени РН 11 по линии визирования в направлении РЛС 12 или в противоположном от РЛС направлении 13 так, что основной лепесток индикатрисы рассеяния 14 УО 4 направлен на калибруемую РЛС 3 (см. фиг.4, фиг.5). При этом максимум основного лепестка индикатрисы рассеяния УО совпадает с линией визирования калибруемой РЛС с предельным значением отклонения угла между максимумом основного лепестка индикатрисы рассеяния УО и линией визирования РЛС в диапазоне от -10 градусов до +10 градусов, и осуществляют закрутку (вращение) уголкового отражателя вокруг оси, совпадающей с биссектрисой угла 7 между гранями УО 4 в плоскости, перпендикулярной середине ребра УО (см. фиг.6, фиг.7).
Кроме того, направляющий контейнер устанавливают в переходном отсеке последней ступени ракеты-носителя.
Кроме того, направляющий контейнер ориентируют в направлении РЛС с помощью системы управления и рулевых двигателей (двигателей малой тяги) последней ступени ракеты-носителя по заданной программе тангажа.
Кроме того, УО транспортируют попутным запуском с помощью РН на высоту более 100 километров по баллистической траектории вместе с исследуемыми объектами при проведении динамических измерений их ЭПР.
Кроме того, перед сеансом измерений или во время его проведения проводят калибровку приемников РЛС с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников РЛС, регистрируют зависимость значений амплитуд сигнала на выходе приемников РЛС от относительного значения мощности (отношения сигнал/шум) сигнала на входе приемников РЛС и получают калибровочный график.
Кроме того, амплитуды отраженных сигналов от УО регистрируют, а затем по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников РЛС от относительного значения мощности сигнал/шум на входе приемников РЛС пересчитывают в значения относительной мощности (отношения сигнал/шум) отраженных от УО сигналов.
Кроме того, с помощью калибруемой РЛС измеряют наклонную дальность до УО.
Кроме того, каждое значение относительной мощности отраженного сигнала от УО приводят (пересчитывают) к фиксированной дальности, например 100 км, по формуле:
Pi=Bi+40LogRi/100,
где Bi - единичное значение относительной мощности отраженного от УО сигнала;
Ri - единичное измеренное калибруемой РЛС значение дальности до УО, соответствующее данному Bi.
Кроме того, осуществляют калибровку РЛС по величине эффективной поверхности рассеяния (выполняют сеанс измерений) на интервале времени ΔТ:
ΔT=t2-t1,
где t1 - время начала сеанса измерений (калибровки РЛС);
t2 - время окончания сеанса измерений (калибровки РЛС),
а ΔT может принимать значения в диапазоне от 10 до 600 секунд.
Кроме того, приведенные к фиксированной дальности значения относительной мощности отраженных сигналов от УО усредняют по формуле:

где n - число результатов единичных измерений на интервале времени ΔT.
Кроме того, вычисленное усредненное значение Pcp используют как значение относительной мощности отраженных сигналов, соответствующее эталонному значению ЭПР уголкового отражателя.
Кроме того, направляющий контейнер с уголковым отражателем устанавливают на стабилизированной платформе с системой ориентации платформы в трех плоскостях с помощью соответствующих ракетных двигателей, которая размещается на последней ступени ракеты-носителя.
Кроме того, стабилизированная платформа отделяется от последней ступени ракеты-носителя после завершения работы маршевого двигателя.
Кроме того, стабилизированная платформа автономно осуществляет программное наведение направляющего контейнера до совмещения продольной оси контейнера с линией визирования калибруемой РЛС.
Кроме того, УО отделяют от стабилизированной платформы.
Кроме того, сигнал на отделение уголкового отражателя вырабатывают и формируют от системы программного наведения стабилизированной платформы.
Кроме того, отделение и закрутку (вращение) уголкового отражателя производят одновременно.
Кроме того, закрутку (вращение) уголкового отражателя производят до его отделения от РН или стабилизированной платформы.
Кроме того, задают круговую частоту закрутки ω (вращения) уголкового отражателя в соответствии с условием:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС.
Кроме того, закрутку (вращение) УО 4 осуществляют либо «по часовой стрелке» 15, либо «против часовой стрелки» 16 (см. фиг.6, фиг.7).
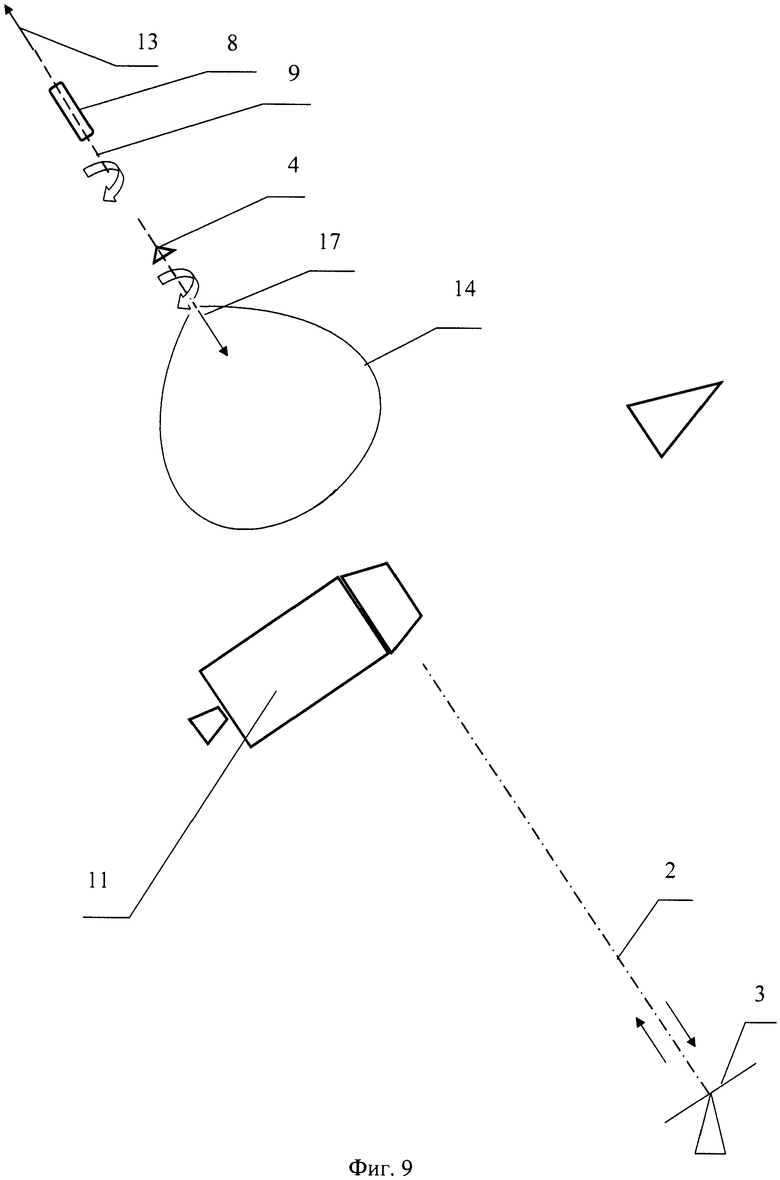
Кроме того, направляющий контейнер 8 с УО отделяют от последней ступени РН или от стабилизированной платформы в направлении РЛС 12 (см. фиг.8) или в противоположном от РЛС направлении 13 (см. фиг.9) так, что продольная ось контейнера 9 совладает с линией визирования 2 калибруемой РЛС 3.
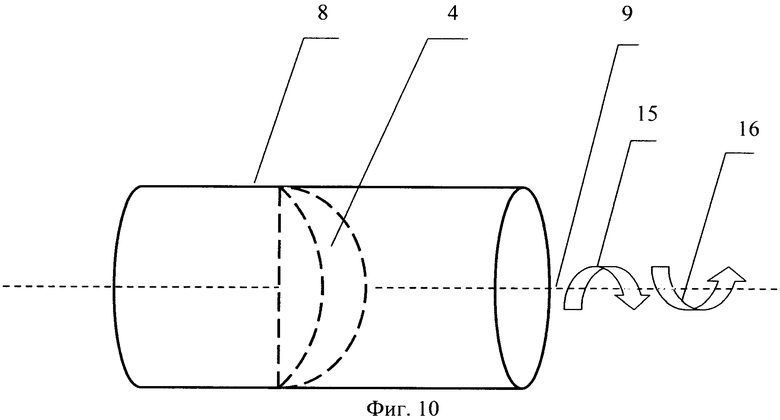
Кроме того, осуществляют закрутку направляющего контейнера 8 с УО 4 вокруг продольной оси контейнера 9 либо «по часовой стрелке» 15, либо «против часовой стрелки» 16 (см. фиг.10).
Кроме того, уголковый отражатель 4 выталкивают (отстреливают) из вращающегося контейнера 8 в направлении РЛС 17 (см. фиг.11) так, что основной лепесток индикатрисы рассеяния 14 УО 4 направлен на калибруемую РЛС 3, а максимум основного лепестка индикатрисы рассеяния УО совпадает с линией визирования калибруемой РЛС с предельным значением отклонения угла между максимумом основного лепестка индикатрисы рассеяния уголкового отражателя и линией визирования РЛС в диапазоне от -10 градусов до +10 градусов.
Кроме того, задают круговую частоту закрутки ω (вращения) контейнера с уголковым отражателем в соответствии с условием:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС.
Предлагаемый способ поясняется чертежами, представленными на фиг.2-21.
На фиг.2 представлен уголковый отражатель 4 в виде двух граней из плоских радиоотражающих полудисков 5 и 6 радиусом a. На фиг.3 - направляющий цилиндрический контейнер 8 с УО 4, причем продольная ось контейнера 9 совмещена с биссектрисой угла 7 между гранями УО в плоскости, перпендикулярной середине ребра УО 4. На фиг.4, фиг.5 представлены варианты отделения УО 4 от последней ступени РН 11, где 9 - продольная ось направляющего цилиндрического контейнера 8, 2 - линия визирования калибруемой РЛС 3, 12 - отделение УО в направлении РЛС, 13 - отделение УО в противоположном от РЛС направлении, 14 - основной лепесток индикатрисы рассеяния вращающегося УО 4. На фиг.6, фиг.7 - варианты закрутки УО 4. На фиг.8, фиг.9 - варианты отделения вращающегося направляющего цилиндрического контейнера 8 в направлении РЛС 12 или в противоположном от РЛС направлении 13, где 4 - вращающийся уголковый отражатель, 2 - линия визирования калибруемой РЛС 3, 14 - основной лепесток индикатрисы рассеяния вращающегося УО 4. На фиг.10 представлены варианты закрутки направляющего цилиндрического контейнера. На фиг.11 показано выталкивание (отстрел) УО 4 (при сохранении вращения УО) из вращающегося направляющего цилиндрического контейнера 8 в направлении РЛС 17. На фиг.12 - вариант размещения направляющего цилиндрического контейнера 8 с УО 4 в переходном отсеке 18 последней ступени РН 11. На фиг.13 показан запуск РН с УО на высоту более 100 км. На фиг.14 представлены варианты отделения УО 4 в направлении РЛС 12 и в противоположном от РЛС направлении 13, где 14 - основной лепесток индикатрисы рассеяния вращающегося УО 4, 19 - максимум основного лепестка индикатрисы рассеяния вращающегося УО 4.
На фиг.15 показано предельно допустимое отклонение максимума основного лепестка индикатрисы рассеяния 19 вращающегося УО 4 от линии визирования 2 калибруемой РЛС 4 (от -10 градусов до +10 градусов). На фиг.16 представлен калибровочный график зависимости значений амплитуд сигнала Ai на выходе приемников РЛС от относительного значения мощности Bi сигнала на входе приемников РЛС. На фиг.17 представлена схема проведения сеанса измерений (калибровки РЛС), где 2 - линия визирования калибруемой РЛС 3, 19 - максимум основного лепестка индикатрисы рассеяния вращающегося УО 4, позиция 20 - положение УО 4 в момент времени, соответствующий началу сеанса измерений (калибровки РЛС), а позиция 21 - положение УО 4, соответствующее моменту времени окончания сеанса измерений (калибровки РЛС). На фиг.18 приведен уголковый отражатель, выполненный в виде двух граней из плоских радиоотражающих полудисков, развернутых под фиксированным углом в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/a,
λ - длина волны калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя,
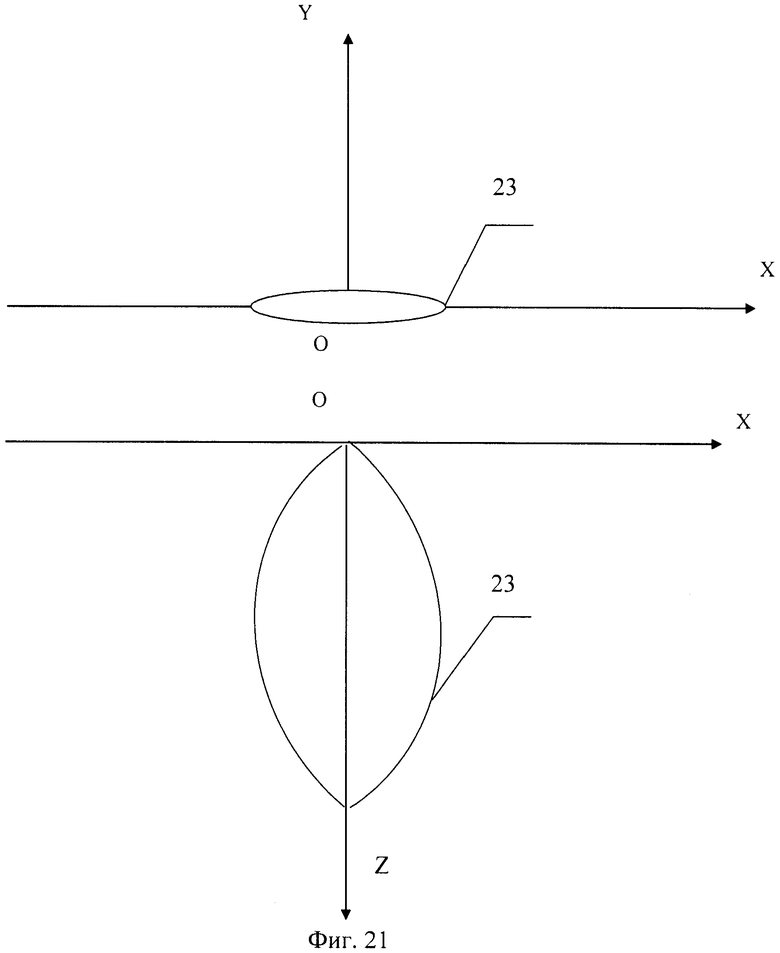
вращающийся вокруг биссектрисы угла между гранями УО в плоскости, перпендикулярной середине ребра УО. На фиг.19 представлены сечения плоскостями XOY и XOZ основного лепестка пространственной индикатрисы рассеяния уголкового отражателя, изображенного на фиг.18. Для сравнения представлены: на фиг.20 - уголковый отражатель, выполненный в виде двух граней из плоских радиоотражающих полудисков с прямым углом между гранями в статическом состоянии (неподвижный); на фиг.21 - сечения плоскостями XOY и XOZ основного лепестка пространственной индикатрисы рассеяния статического (неподвижного) уголкового отражателя, выполненного в виде двух граней из плоских радиоотражающих полудисков плоскостями с прямым углом между гранями.
Предложенный способ реализуется следующим образом. До запуска ракеты-носителя в переходном отсеке 18 последней ступени РН 11 размещают установленный в направляющем контейнере 8 уголковый отражатель 4 (см. фиг.12). При этом предварительно продольную ось направляющего контейнера совмещают биссектрисой угла между гранями УО в плоскости, перпендикулярной середине ребра УО. Для проведения калибровки РЛС осуществляют запуск РН с УО на высоту более 100 км (см. фиг.13). На заданном участке траектории полета с помощью системы управления РН осуществляют ориентацию последней ступени ракеты-носителя с переходным отсеком и направляющим контейнером. Ориентацию последней ступени РН 11 выполняют таким образом, чтобы продольная ось 9 направляющего контейнера 8, а следовательно, и биссектриса угла между гранями УО в плоскости, перпендикулярной середине ребра УО, была направлена вдоль линии визирования 2 калибруемой РЛС 3 (см. фиг.14). В момент достижения заданного положения последней ступени от системы управления РН поступает сигнал на отделение (выброс) УО. Отделение УО осуществляется или в направлении РЛС 12, или в противоположном от РЛС направлении 13 так, что основной лепесток индикатрисы рассеяния 14 УО 4 направлен на калибруемую РЛС 3 (см. фиг.14). Дополнительно уголковому отражателю придается вращательное движение вокруг оси 7, совпадающей с биссектрисой угла между гранями уголкового отражателя 4 в плоскости, перпендикулярной середине ребра УО (см. фиг.6, фиг.7). Вращение (закрутка) УО может осуществляться либо в направлении по часовой стрелке 15, либо против часовой стрелки 16 (см. фиг.6, фиг.7). При этом максимум основного лепестка индикатрисы рассеяния 19 уголкового отражателя 4 оказывается совмещенным с линией визирования 2 калибруемой РЛС 3 и осью вращения УО (см. фиг.14). Отклонение максимума ЭПР 19 уголкового отражателя 4 от линии визирования 2 калибруемой РЛС 3 не должно превышать ±10 градусов, фиг.15 (в случае использования прямого кругового цилиндра как эталона ЭПР допустимое отклонение линии визирования РЛС от направления, перпендикулярного оси кругового цилиндра (совпадающего с максимумом лепестка индикатрисы рассеяния), составляет менее одного градуса). Перед сеансом измерений или во время его проведения проводят калибровку приемников РЛС одним из известных методов калибровки радиотехнических устройств [1, стр.194], [5] с помощью калиброванных генераторов, подключаемых к высокочастотному входу приемников РЛС [2]. Регистрируют зависимость значений амплитуд сигнала на выходе приемников РЛС от относительного значения мощности (отношения сигнал/шум) сигнала на входе приемников РЛС и получают калибровочный график (см. фиг.16). Сеанс измерений (калибровки РЛС) начинают после того, как последняя ступень РН, другие отделяемые от РН объекты и УО разойдутся на расстояние, большее разрешающей способности по дальности калибруемой РЛС. Облучают УО сигналами калибруемой РЛС, принимают отраженные сигналы от УО, а также регистрируют амплитуды Ai отраженных сигналов от УО и измеряют их на интервале времени ΔT:
ΔT=t2-t1,
где t1 - время начала сеанса измерений (калибровки РЛС);
t2 - время окончания сеанса измерений (калибровки РЛС).
Причем ΔT может принимать значения в диапазоне от 10 до 600 секунд (позиция 20 представляет положение УО в момент времени t1, а позиция 21 представляет положение УО в более позднее время t2) (см. фиг.17). Затем по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников РЛС от относительного значения мощности сигнала на входе приемников РЛС зарегистрированные амплитуды Ai пересчитывают в значения относительной мощности (отношения сигнал/шум) Bi отраженных сигналов от УО с помощью известных формул интерполяции [6, стр.14-19]. С помощью калибруемой РЛС измеряют наклонную дальность до УО. Значения относительной мощности отраженного сигнала от УО пересчитывают (приводят) к фиксированной дальности, например 100 км, по формуле:
Pi=Bi+40LogRi/100,
где Bi - единичное значение относительной мощности отраженного сигнала от уголкового отражателя;
Ri - единичное измеренное значение дальности до уголкового отражателя, соответствующее данному Bi.
«Приведенные» к фиксированной дальности значения относительной мощности отраженных сигналов от уголкового отражателя усредняют по формуле:
где n - число результатов единичных измерений на интервале времени ΔT.
Полученное усредненное значение Pcp используют при измерениях ЭПР баллистических и космических объектов как значение относительной мощности отраженных сигналов, соответствующее эталонному значению ЭПР уголкового отражателя.
Использование двугранного уголкового отражателя из двух плоских радиоотражающих полудисков и установление значений угла между гранями в диапазоне от (90-Δ) градусов до (90+Δ) градусов позволяет достичь «уплощения» формы основного лепестка индикатрисы рассеяния УО в горизонтальной плоскости. Тем самым сектор углов основного лепестка индикатрисы рассеяния УО в горизонтальной плоскости, в котором его ЭПР практически не меняется, достигает ±10 градусов [3, стр.150, рис.4.7, кривые 2, 3]. При этом Δ определяется из соотношения:
0<Δ<18λ/a,
где λ - длина волны калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя.
Использование вращающегося уголкового отражателя вокруг оси, совпадающей с биссектрисой угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, позволяет сохранить ориентацию основного лепестка индикатрисы рассеяния и обеспечить постоянное значение ЭПР уголкового отражателя в направлении РЛС в течение всего сеанса измерений (сеанса калибровки РЛС по величине ЭПР).
Применение закрутки уголкового отражателя 4 с круговой частотой
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС,
позволяет получить эффективный отражатель с относительно широкой индикатрисой рассеяния, не менее 30 градусов на уровне - 3 дБ (при условии 2πa/λ>>1), и «уплощенной» формой основного лепестка индикатрисы рассеяния 22 в двух плоскостях - вертикальной и горизонтальной (см. фиг.18, фиг.19). Причем ширина основного лепестка индикатрисы рассеяния вращающегося уголкового отражателя вокруг оси, совпадающей с биссектрисой угла между гранями в плоскости, перпендикулярной середине ребра УО в вертикальной и горизонтальной плоскостях, одинакова и при этом равна ширине основного лепестка индикатрисы рассеяния статического (неподвижного) уголкового отражателя в горизонтальной плоскости 23 (см. фиг.20, 21). Тем самым сектор углов основного лепестка индикатрисы рассеяния УО, в котором его ЭПР практически не меняется, и в вертикальной и в горизонтальной плоскостях достигает - 20° (градусов) (±10°) (см. фиг.19), что позволяет значительно увеличить интервал времени сеанса калибровки.
Проведение пересчета значений относительной мощности к стандартной дальности позволяет исключить зависимость выполняемых измерений от изменения расстояния между РЛС и УО в течение сеанса измерений (сеанса калибровки РЛС по величине ЭПР).
Полученное в результате статистической обработки единичных измерений Pcp существенно точнее единичного значения Pi, а именно: случайные погрешности уменьшатся в  раз, где n - число результатов единичных измерений на интервале времени ΔT.
раз, где n - число результатов единичных измерений на интервале времени ΔT.
Из вышеизложенного следует, что предложенные технические решения имеют преимущества по сравнению с известными способами калибровки РЛС. А именно, позволяют повысить точность калибровки РЛС, работающей на волнах круговой поляризации при параллельном приеме отраженных сигналов по величине ЭПР при проведении динамических измерений ЭПР баллистических и космических объектов.
По материалам заявки на предприятии было проведено моделирование процессов калибровки РЛС при проведении динамических измерений ЭПР, подтвердившее достижение вышеназванного технического результата.
Источники информации
1. Е.Н.Майзельс, В.А.Торгованов, под редакцией М.А.Колосова. Измерение характеристик рассеяния радиолокационных целей. «Советское радио», М., 1972 г., стр.19-20, стр.144-145, стр.178-179, стр.193-194, стр.204-213.
2. Олин (I.D.Olin). Динамические измерения радиолокационных поперечных сечений. ТИИЭР, 1965, т.53, №8.
3. В.О.Кобак, под редакцией О.Н.Леонтьевского. Радиолокационные отражатели. «Советское радио», М., 1975 г., стр.103, 144, 146, 150, 152, 235.
4. А.И.Леонов, С.А.Леонов, Ф.В.Нагулинко и др., под редакцией А.И.Леонова. Испытания РЛС. «Радио и связь», М., 1990 г., стр.37.
5. Проверка радиоизмерительных приборов. Сборник инструкций, издание официальное. Стандартгиз, 1961.
6. Н.Джонсон, Ф.Лион. Статистика и планирование эксперимента в технике и науке. Методы обработки данных. «Мир», M., 1980 г., стр.14-19.
7. М.Сколник, под редакцией Я.С.Ицхоки. Справочник по радиолокации. T.1. «Советское радио», М., 1976 г., стр.356-397.








Изобретение относится к области радиолокации и может быть использовано при калибровке радиолокационных станций (РЛС) по величине эффективной поверхности рассеяния (ЭПР). Предлагаемый способ включает запуск ракеты-носителя (РН) с эталонным отражателем (ЭО), облучение отражателя сигналами РЛС, прием и измерение амплитуды отраженных сигналов. При этом в качестве эталона ЭПР на высоту более 100 км транспортируют уголковый отражатель (УО) из двух плоских радиоотражающих полудисков, развернутых под углом в диапазоне от (90-Δ)° до (90+Δ)°, где Δ определяется из соотношения 0<Δ<18λ/а, λ - длина волны калибруемой РЛС. До запуска УО помещают в направляющий контейнер, совмещая продольную ось контейнера с биссектрисой угла между гранями УО. Перед отделением УО от РН последнюю ступень РН с контейнером ориентируют при помощи системы управления РН так, что продольная ось контейнера направлена вдоль линии визирования РЛС. УО отделяют от РН по линии визирования РЛС так, что основной лепесток индикатрисы рассеяния УО направлен на РЛС, а его максимум совпадает с линией визирования РЛС. Кроме того, осуществляют закрутку УО вокруг оси, совпадающей с биссектрисой угла между его гранями. Достигаемый технический результат - повышение точности калибровки РЛС за счет исключения ошибки, вызванной отклонением максимума ЭПР ЭО от линии визирования РЛС. 12 з.п. ф-лы, 21 ил.
1. Способ калибровки радиолокационной станции, работающей на волнах круговой поляризации при параллельном приеме отраженных сигналов, по величине эффективной поверхности рассеяния при динамических измерениях эффективной поверхности рассеяния баллистических и космических объектов, согласно которому с помощью ракеты-носителя запускают отражатель с известной величиной эффективной поверхности рассеяния, облучают его сигналами калибруемой радиолокационной станции, принимают отраженные сигналы от отражателя, находящегося в дальней зоне антенны радиолокационной станции, измеряют амплитуды отраженных сигналов, отличающийся тем, что на высоту более 100 км с помощью ракеты-носителя транспортируют в качестве эталона эффективной поверхности рассеяния уголковый отражатель, выполненный в виде двух граней из плоских радиоотражающих полудисков, развернутых под фиксированным углом в диапазоне от (90-Δ)° до (90+Δ)°, где Δ - определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой радиолокационной станции,
а - радиус полудиска грани уголкового отражателя,
предварительно, до запуска ракеты-носителя, уголковый отражатель помещают в направляющий цилиндрический контейнер, при этом продольную ось цилиндрического контейнера совмещают с биссектрисой угла между гранями уголкового отражателя в плоскости, перпендикулярной середине ребра уголкового отражателя, перед отделением уголкового отражателя от ракеты-носителя с помощью системы управления ракеты-носителя по заданной программе тангажа осуществляют программный разворот - ориентацию последней ступени ракеты-носителя с направляющим контейнером относительно радиолокационной станции до совмещения продольной оси контейнера, совпадающей с биссектрисой угла между гранями уголкового отражателя в плоскости, перпендикулярной середине ребра уголкового отражателя с линией визирования калибруемой радиолокационной станции, по сигналу от системы управления ракеты-носителя направляющий контейнер с уголковым отражателем отделяют от ракеты-носителя по линии визирования в направлении радиолокационной станции или в противоположном от радиолокационной станции направлении так, что основной лепесток индикатрисы рассеяния уголкового отражателя направлен на калибруемую радиолокационную станцию, а максимум основного лепестка индикатрисы рассеяния уголкового отражателя совпадает с линией визирования калибруемой радиолокационной станции с предельным значением отклонения угла между максимумом основного лепестка индикатрисы рассеяния уголкового отражателя и линией визирования радиолокационной станции в диапазоне от -10° до +10°, и осуществляют закрутку или вращение уголкового отражателя вокруг оси, совпадающей с биссектрисой угла между гранями уголкового отражателя в плоскости, перпендикулярной середине ребра уголкового отражателя, перед сеансом калибровки радиолокационной станции по величине эффективной поверхности рассеяния или во время его проведения проводят калибровку приемников радиолокационной станции с помощью калиброванных генераторов, подключаемых к высокоточному входу приемников радиолокационной станции, регистрируют зависимость значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности сигнала, представляющего собой отношение сигнал/шум на входе приемников радиолокационной станции, и получают калибровочный график, осуществляют калибровку радиолокационной станции по величине эффективной поверхности рассеяния, а именно, выполняют сеанс калибровки на интервале времени ΔT:
ΔT=t2-t1,
где t1 - время начала сеанса калибровки,
t2 - время окончания сеанса калибровки,
a ΔT принимает значения в диапазоне от 10 до 600 с,
при этом измеренные амплитуды отраженных сигналов от уголкового отражателя регистрируют, а потом по калибровочному графику зависимости значений амплитуд сигнала на выходе приемников радиолокационной станции от относительного значения мощности на входе приемников радиолокационной станции пересчитывают в значения относительной мощности отраженных от уголкового отражателя сигналов.
2. Способ по п.1, отличающийся тем, что направляющий контейнер устанавливают в переходном отсеке последней ступени ракеты-носителя.
3. Способ по п.1, отличающийся тем, что направляющий контейнер ориентируют в направлении радиолокационной станции с помощью системы управления и рулевых двигателей последней ступени ракеты-носителя, по заданной программе тангажа.
4. Способ по п.1, отличающийся тем, что уголковый отражатель транспортируют попутным запуском с помощью ракеты-носителя на высоту более 100 км по баллистической траектории вместе с исследуемыми объектами при проведении динамических измерений их эффективной поверхности рассеяния.
5. Способ по п.1, отличающийся тем, что с помощью калибруемой радиолокационной станции измеряют наклонную дальность до уголкового отражателя.
6. Способ по п.1, отличающийся тем, что значения относительной мощности отраженных от уголкового отражателя сигналов приводят к фиксированной дальности, например 100 км, путем пересчета по формуле:
Pi=Bi+40LogRi/100,
где Bi - единичное значение относительной мощности отраженного сигнала от уголкового отражателя,
Ri - единичное измеренное калибруемой радиолокационной станцией значение наклонной дальности до уголкового отражателя, соответствующее данному Bi.
7. Способ по п.1, отличающийся тем, что приведенные к фиксированной дальности единичные значения относительной мощности отраженных от уголкового отражателя сигналов усредняют по формуле:
 ,
,
где n - число результатов единичных измерений на интервале времени ΔT.
8. Способ по п.7, отличающийся тем, что усредненное значение Рср используют как значение относительной мощности отраженных сигналов, соответствующее эталонному значению эффективной поверхности рассеяния у толкового отражателя.
9. Способ по п.1, отличающийся тем, что отделение и закрутку уголкового отражателя производят одновременно.
10. Способ по п.1, отличающийся тем, что задают круговую частоту закрутки или вращения ω уголкового отражателя в соответствии с условием:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой радиолокационной станции,
а - радиус полудиска грани уголкового отражателя,
λ - длина волны калибруемой радиолокационной станции.
11. Способ по п.1, отличающийся тем, что закрутку или вращение уголкового отражателя осуществляют либо «по часовой стрелке», либо «против часовой стрелки».
12. Способ по п.1, отличающийся тем, что осуществляют закрутку направляющего контейнера с уголковым отражателем вокруг продольной оси контейнера либо «по часовой стрелке», либо «против часовой стрелки».
13. Способ по п.1, отличающийся тем, что задают круговую частоту закрутки или вращения ω контейнера с уголковым отражателем в соответствии с условием:
ω>12Ррлсπа/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой радиолокационной станции,
а - радиус полудиска грани уголкового отражателя,
λ - длина волны калибруемой РЛС.
| Измерение характеристик рассеяния радиолокационных целей | |||
| /Под ред | |||
| М.А | |||
| КОЛОСОВА | |||
| - М.: Советское радио, 1972, с.206-213 | |||
| Способ сверх сенсибилизации фотографических галоидосеребряных эмульсий | 1950 |
|
SU94767A1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| УСТРОЙСТВО КАЛИБРОВКИ НАЗЕМНЫХ РАДИОЛОКАЦИОННЫХ ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ ПОД МАЛЫМИ УГЛАМИ МЕСТА | 2004 |
|
RU2278396C2 |
| ПАРАМЕТРИЧЕСКИЙ ЭТАЛОННЫЙ ОТРАЖАТЕЛЬ | 2004 |
|
RU2277741C1 |
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| US 6731236 В1, 04.05.2004 | |||
| CN 201804120 U, 20.04.2011 | |||
| US 7345625 B1, 18.03.2008 | |||
| СВЕТООТРАЖАТЕЛЬ СВЕТИЛЬНИКА ДЛЯ ТЕПЛИЦЫ | 1993 |
|
RU2056731C1 |

