Изобретение относится к технике радиосвязи и может быть использовано для дистанционного управления движением наземными и воздушными объектами.
Прототипом принята система управления [1], содержащая устройство определения координат, передатчик радиосигналов и расположенные на объекте управления, приемную часть и излучатель, Устройство определения координат включает объектив, зрительную трубу, передающую телевизионную трубку, блок обработки сигналов, формирователь кодов управляющих сигналов. Приемная часть содержит блок приема радиосигнала, усилитель радиочастоты, двухполярный амплитудный детектор, синтезатор частот и два канала, каждый из которых включает формирователь импульсов, регистр и дешифратор. Излучатель из светодиодов, крепится на корпусе управляемого объекта. Недостаток прототипа: низкая разрешающая способность при определении координат объекта, 16 направлений при 31 значении на каждом, т.е. 496 местоположений в поле зрения объектива.
Цель изобретения - повышение точности управления. Техническим результатом является повышение точности управления путем увеличения разрешающей способности при определении координат в поле зрения системы до 10000 местоположений управляемого объекта.
Сущность изобретения в том, что в устройство определения координат системы управления вводится датчик координат.
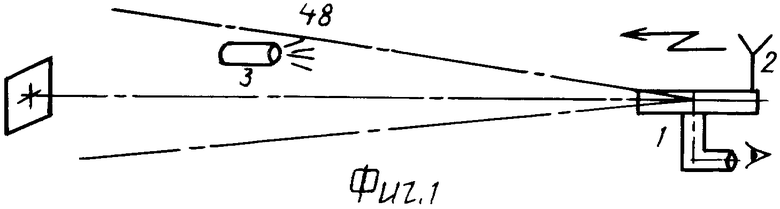
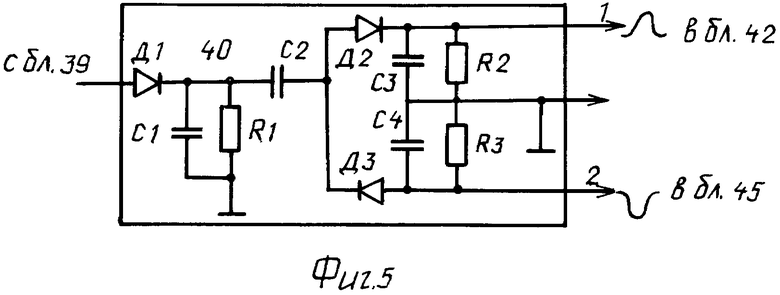
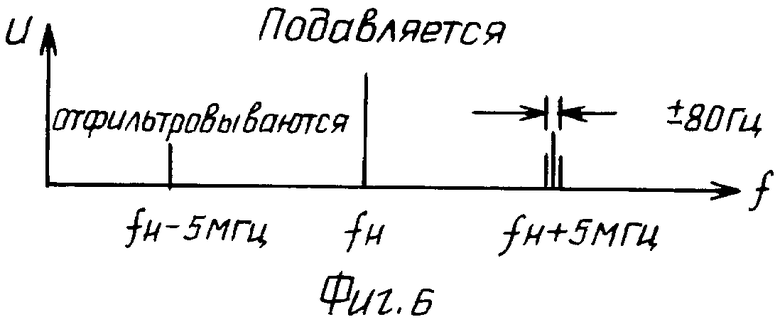
Заявляемая система управления приведена на фиг.1 и включает устройство 1 определения координат, передатчик 2 радиосигналов, приемную часть 3 и излучатель 48, расположенные на объекте управления. Устройство определения координат 1 и передатчик 2 радиосигналов приведены на фиг.2, приемная часть 3 - на фиг.3, координаты излучателя в поле зрения - на фиг.4, схема двухполярного амплитудного детектора - на фиг.5, спектр частот амплитудно-модулированного сигнала - на фиг.6, временные диаграммы работы системы - на фиг.7.
Устройство 1 определения координат содержит /фиг.2/ объектив 4 с соответствующим полем зрения, зрительную трубу 5, датчик 6 координат, включающий матрицу ПЗИ 7 - прибор с зарядовой инжекцией по технологии Foveon Х3 из трехслойного датчика КМОП [2, с.552] [3, с.832 pис.21.12] с соответствующим оптическим разрешением, фоточувствительная сторона матрицы расположена после зрительной трубы в фокальной плоскости объектива 4, красный светофильтр 8, расположенный на фоточувствительной стороне матрицы ПЗИ 7, импульсный усилитель 9, вход которого подключен к соответствующему выходу матрицы ПЗИ, последовательно соединенные генератор 10 тактовых импульсов, делитель 11 частоты и первый ключ 12, второй 13, третий 14 и четвертый 15 ключи, первый 16 и второй 17 счетчики импульсов, первый 18 и второй 19 дешифраторы. Первым и вторым выходами датчика 6 координат являются 1-8 выходы счетчика 16 импульсов и 1-6 выходы счетчика 17 импульсов, первым управляющим выходом является третий выход делителя 11 частоты, вторым управляющим выходом является выход импульсного усилителя 9. Устройство 1 включает формирователь 20 кодов управляющих сигналов, содержащий генератор 21 синусоидальных колебаний и два идентичных канала, входы которых являются первым и вторым информационными входами формирователя 20 кодов управляющих сигналов, а выходы их объединены. Первый канал включает последовательно соединенные первый блок 22 элементов И, которых восемь штук, первые входы которых являются первым информационным входом блока 20, первый элемент ИЛИ 23 и первый выходной ключ 24, и первый самоходный распределитель 25 импульсов /СРИ/, второй канал включает последовательно соединенные второй блок 26 элементов И, которых восемь штук, первые входы которых являются вторым информационным входом блока 20, второй элемент или 27 и второй выходной ключ 28, и второй СРИ 29. Генератор 21 подключен к первому управляющему выходу датчика 6 координат и формирует из тактовых импульсов синусоидальные колебания, поступающие на сигнальные входы выходных ключей 24, 28, выходы которых объединены и являются вторым выходом блока 20 и вторым выходом устройства 1 определения координат. Первым выходом блока 20 и первым выходом устройства 1 является выход генератора 21 синусоидальных колебаний. Входы первого 25 и второго 29 СРИ объединены и подключены к второму управляющему выходу датчика 6 координат. Первый выход 500 Гц делителя частоты 11 подключен к управляющему входу первого ключа 12 и к первому управляющему входу третьего ключа 14, второй выход делителя 11 частоты подключен параллельно к сигнальному входу первого ключа 12, к управляющему входу второго ключа 13, к сигнальному входу третьего ключа 14 и к первому управляющему входу четвертого ключа 15, третий выход 5 МГц делителя 11 частоты подключен к сигнальному входу ключа 13, к сигнальному входу ключа 15 и является первым управляющим выходом датчика 6 координат. Счетный вход первого счетчика 16 импульсов подключен к выходу третьего ключа 14, счетный вход второго счетчика 17 импульсов подключен к выходу четвертого ключа 15.
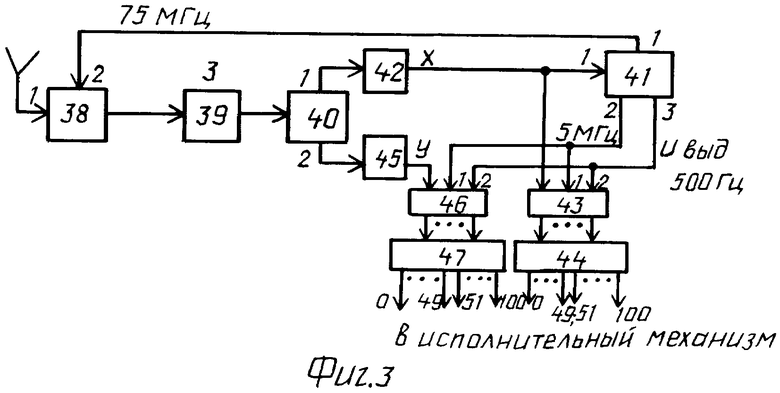
Вторые управляющие входы ключей 14, 15 и первые управляющие входы /Uвыд/ счетчиков 16, 17 импульсов объединены и подключены к выходу импульсного усилителя 9. Второй управляющий вход Uо счетчика 16 импульсов подключен к выходу первого дешифратора 18, три входа которого подключены соответственно к выходам третьего, шестого и седьмого разрядов в счетчике 16 импульсов /01100100/. Второй управляющий вход Uо счетчика 17 импульсов подключен к выходу второго дешифратора 19, три входа которого подключены соответственно к выходам третьего, шестого и седьмого разрядов в счетчике 17 импульсов. Счетчики 16, 17 импульсов восьмиразрядные. Выход первого ключа 12 подключен к первому входу матрицы ПЗИ 7, выход второго ключа 13 /5 МГц/ подключен к второму входу матрицы ПЗИ 7. Зрительная труба 5 /фиг.2/ расположена после объектива 4 и перед датчиком 6 координат и включает последовательно расположенные полупрозрачное зеркало 30, расположенные под углом 45° к оптической оси объектива 4, полевую линзу 31 с перекрестием на ней, расположенную в фокальной плоскости объектива 4 и оптическая ось которой перпендикулярна оптической оси объектива 4, прямоугольную призму 32, оборачивающую систему 33 и окуляр 34. Оптические оси оборачивающей системы 33 и окуляра 34 перпендикулярны оптической оси полевой линзы 31 и параллельны оптической оси объектива 4. Передатчик 2 радиосигналов /фиг.2/ включает последовательно соединенные генератор 35 несущей частоты, вход которого подключен к первому выходу устройства 1 определения координат, амплитудный модулятор 36, второй вход которого подключен к второму выходу устройства 1 определения координат, и выходной усилитель 37. Приемная часть 3 расположена на корпусе управляемого объекта и включает /фиг.3/ антенну, последовательно соединенные блок 38 приема радиосигналов, усилитель 39 радиочастоты и двухполярный амплитудный детектор 40, синтезатор 41 частот и два канала.
Первый канал включает последовательно соединенные первый формирователь 42 импульсов, вход которого подключен к первому выходу двухполярного амплитудного детектора 40, регистр 43 и дешифратор 44, выходы которого являются первыми выходами приемной части. Второй канал включает последовательно соединенные второй формирователь 45 импульсов, вход которого подключен к второму выходу блока 40, регистр 46 и дешифратор 47, выходы которого являются вторыми выходами приемной части. Выходы дешифратора 44 являются управляющими сигналами для исполнительного механизма, корректирующего движение управляющего объекта по координате X. Выходы с дешифратора 47 являются управляющими сигналами для исполнительного механизма, корректирующего движение объекта по координате Y. Излучатель 48 крепится на соответствующем месте корпуса объекта и в зависимости от предназначения объекта включает один или несколько объединенных светодиодов с красными светофильтрами на излучающей стороне с яркостью излучения, достаточной для визуального наблюдения в пределах прямой видимости. В качестве светодиодов применяются сверхъяркие светодиоды белого свечения с красными светофильтрами на излучающей стороне светодиода. Генератор 10 тактовых импульсов обеспечивает устройство 1 определения координат тактовыми импульсами частотой 5 МГц со стабильностью 10-6:
fT = 500 Гц × 100 ст × 100 отсч = 5 МГц,
где: 500 Гц - частота сканирования поля зрения, частота кадров,
100 ст - число строк сканирования по вертикали,
100 отсч - число отсчетов в строке.
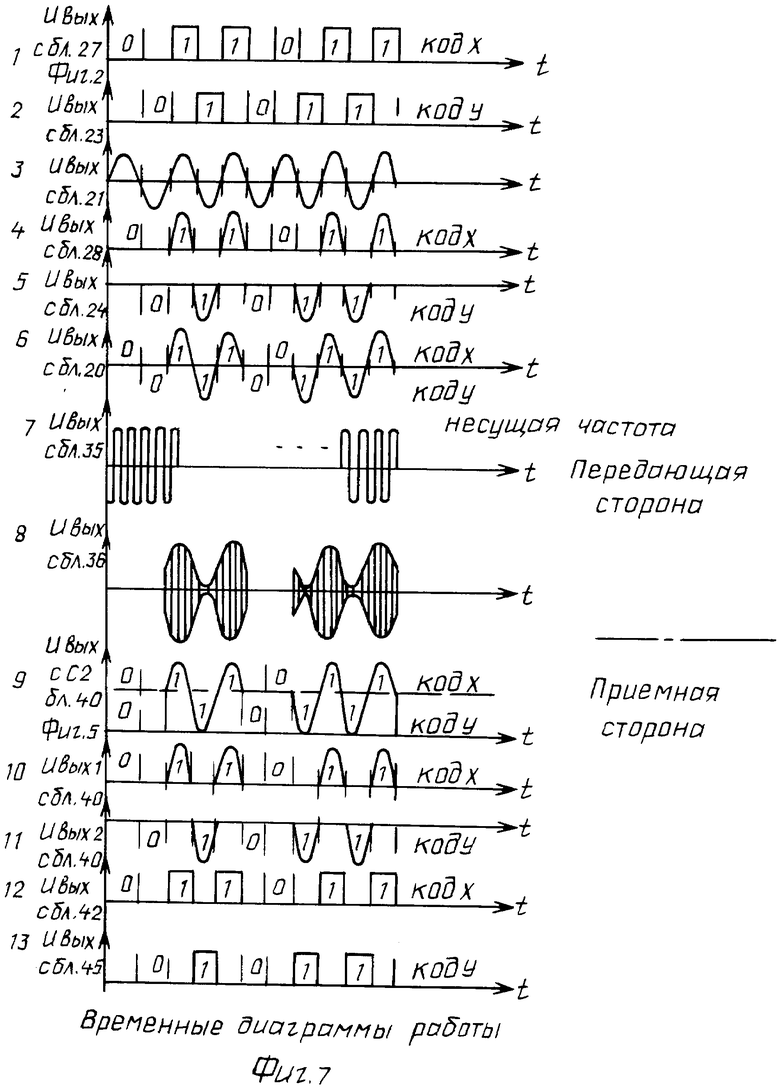
Делитель 11 частоты выполняет деление частоты 5 МГц на первом выходе 10000:1 /500 Гц/, на. втором выходе 100:1 /50 кГц/, на третьем выходе 1:1 /5 МГц/. Первый ключ 12 открывается на длительность кадра 2 мс передним фронтом импульса 500 Гц и закрывается задним фронтом импульса. В открытом состоянии ключ 12 пропускает на первый вход матрицы ПЗИ 7 импульсы 50 кГц. Второй ключ 13 открывается передним фронтом импульса 50 кГц на длительность строки 20 мкс и закрывается его задним фронтом, в открытом состоянии ключ 13 пропускает на второй вход матрицы ПЗИ 7 импульсы 5 МГц для считывания заряда с пикселов матрицы ПЗИ в строках [3, с.832, рис.21.12]. Объектив 4 создает изображение излучателя 48 /фиг.2/ на пикселах матрицы ПЗИ, выходной импульс с которой, усиленный в усилителе 9, поступает сигналом U3 в ключи 14, 15, закрывая их, и сигналом Uвыд в первый 16 и второй 17 счетчики импульсов, выдавая из них координату Y из счетчика 16 и координату X из счетчика 17. При выдаче кодов счетчики обнуляются. Ключи 14, 15 открываются синхронно с открытием ключей 12, 13. Счетчик 16 ведет счет импульсов 50 кГц до прихода сигнала Uвыд счетчик 17 импульсов ведет счет импульсов Uвыд 5 МГц до прихода сигнала Uвыд. В отсутствие сигнала выдачи счетчик 16 насчитывает за кадр 2 мс 100 импульсов, в двоичном коде 01100100, содержимое счетчика дешифрируется дешифратором 18, который выходным сигналом обнуляет счетчик 16 для счета в следующем кадре 2 мс. Счетчик 17 в отсутствие сигнала выдачи насчитывает за период строки 20 мкс тоже 100 импульсов, в двоичном коде 01100100, этот код дешифрируется дешифратором 19, выходной сигнал с него обнуляет счетчик 17 для счета в следующем периоде строки. В момент сканирования изображения излучателя 48 сигнал с выхода матрицы 7 поступает в усилитель 9, выходной сигнал с которого закрывает ключи 14, 15 и выдает коды X, Y излучателя 48 со счетчиков 16, 17 на информационные входы блока 20. Формирователь 20 кодов управляющих сигналов преобразует параллельные коды в последовательные и заменяет в них представление единиц с импульсов на положительные полусинусоиды в кодах X и на отрицательные полусинусоиды в кодах Y. Временные диаграммы работы на фиг.7. Замена импульсов на полусинусоиды позволяет передавать коды X и Y параллельно одной несущей частотой в узкой полосе частот 160 Гц, равной нестабильности несущей частоты. На первые входы элементов И блоков 22, 26 синхронно поступают параллельные коды координат X, Y, вторые входы элементов И этих блоков подключены к 1-6 выходам соответственно СРИ 25, 29, которые запускаются в работу сигналом с импульсного усилителя 9. С выходов элементов И блоков 22, 26 импульсы кодов через элементы ИЛИ 23, 27 последовательно поступают на управляющие входы Uот выходных ключей 24, 28, открывая их на время своей длительности
Выходной ключ 28 в открытом состоянии пропускает одну положительную полусинусоиду моночастоты 5 МГц с генератора 21, выходной ключ 24 пропускает одну отрицательную полусинусоиду той же частоты 5 МГц. С второго выхода формирователя 20 кодов на второй вход амплитудного модулятора 36 поступают полные и неполные синусоиды моночастоты 5 МГц, являющиеся модулирующим сигналом несущей частоты. Первый выход блока 20 подключен к входу генератора 35 несущей частоты, который является умножителем частоты 5 МГц на 15:
fн = 5 МГц × 15 = 75 МГц со стабильностью 10-6.
Амплитудный модулятор 36 включает последовательно соединенные кольцевой модулятор и полосовой фильтр [4, c.234]. Сама несущая частота и одна из боковых частот в информационном смысле являются избыточными, поэтому в амплитудном модуляторе кольцевой модулятор подавляет несущую частоту, полосовой фильтр отфильтровывает ненужную боковую частоту, отфильтровывается нижняя боковая частота. Верхняя боковая частота fв = 75 МГц + 5 МГц = 80 МГц с амплитудного модулятора 36 поступает в выходной усилитель 37 передатчика 2 радиосигналов, которая с информацией кодов сигналов управления излучается в эфир и при стабильности несущей 10 занимает полосу в эфире ±80 Гц /160 Гц/. Радиосигналы принимаются блоком 38 приема радиосигналов приемной части /фиг.3/, который содержит входную цепь, усилитель радиочастоты и смеситель. Радиочастотный сигнал поступает на первый вход смесителя блока 38, на второй вход смесителя подается несущая частота с синтезатора 41 частот /75 МГц/ с первого выхода, которая необходима для детектирования однополосного сигнала [5, с.146]. Сигнал со смесителя, являющийся выходным сигналом блока 38, усиливается в усилителе 39 радиочастоты до необходимой величины и поступает на вход двухполярного амплитудного детектора 40, выполненного по схеме фиг.5. Диод Д1 выделяет положительную огибающую модулирующего сигнала /фиг.7, диагр.9/. Диод Д2 из модулирующей выделяет огибающие положительных полусинусоид / символы единиц кодов X/. Диод ДЗ выделяет из модулирующей огибающие отрицательных полусинусоид /символы единиц кодов Y/. С первого выхода блока 40 продетектированные положительные полусинусоиды частоты 5 МГц поступают на вход первого формирователя 42 импульсов, со второго выхода блока 40 продетектированные отрицательные полусинусоиды 5 МГц поступают на вход второго формирователя 45 импульсов. Формирователи 42, 45 импульсов формируют прямоугольные импульсы из полусинусоид. Импульсы имеют одну полярность и длительность, равную длительности в кодах блока 20. Единицы опять представляются наличием импульса, нули их отсутствием. Собственная стабильность частоты синтезатора 41 частот 10-5, подстройка его частоты по фазе к несущей частоте передатчика 2 выполняется по импульсам с формирователя 42 импульсов. Синтезатор 41 частот выдает с второго выхода импульсы тактовой частоты 5 МГц на первые управляющие входы регистров 43, 46, с третьего выхода импульсы частоты дискретизации кодов
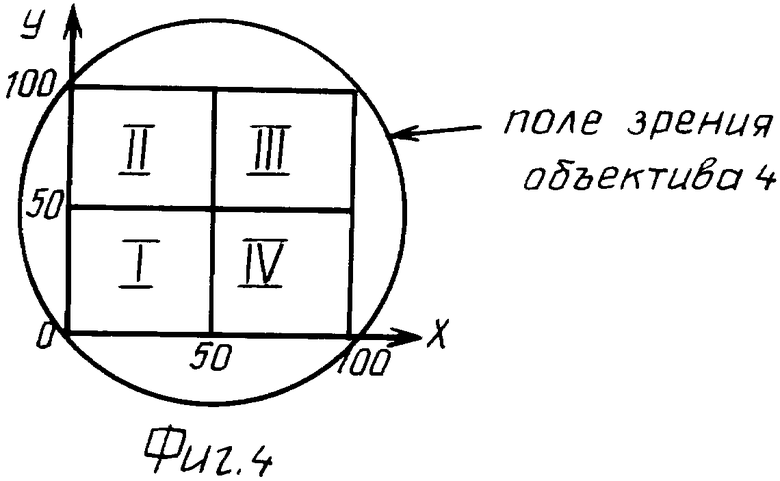
500 Гц /Uвыд/ на вторые управляющие входы регистров 43, 46. Код X с формирователя 42 импульсов в последовательном виде поступает на информационный вход регистра 43, заполняя его, принимает параллельный вид. Код Y с формирователя 45 импульсов поступает на информационный вход регистра 46 и принимает параллельный вид. С регистров 43, 46 коды синхронно выдаются в свои дешифраторы 44, 47, дешифрирующие коды и выдающие с соответствующего выхода управляющий сигнал в соответствующий исполнительный механизм. Расположение координат излучателя 48 объекта управления относительно центра поля зрения объектива 4 определяет число и нумерацию выходов с дешифраторов 44, 47, приводимое в таблице.
Выходами дешифраторов 44 и 47 являются выходы с 0 по 49 и с 51 по 100.
Работа системы
Система управления осуществляет дистанционное беспроводное управление наземными или воздушными подвижными объектами в пределах прямой видимости излучателя 48 на управляемом объекте, оснащенной соответствующими исполнительными механизмами. Для управления на объекте крепится излучатель и приемная часть 3, Формирователь 20 кодов и передатчик 2 радиосигналов выполняются в одном корпусе, зрительная труба 5 с объективом 4 и датчиком 6 координат выполняются вместе в форме, удобной для надевания на голову оператора, который, наблюдая через зрительную трубу 5, наводит перекрестие в конечную точку доставки объекта, включает питание в системе управления и дает сигнал на пуск управляемого объекта. При входе объекта в поле зрения объектива 4 с выхода 2 блок 20 выдает на второй вход амплитудного модулятора 36 коды X, Y излучателя 48. Коды поступают с частотой 500 Гц /один из вариантов/. Приемная часть 3 /фиг.3/ принимает радиосигналы, выполняет их детектирование. С выходов регистров 43, 46 коды X, Y объекта выдаются в дешифраторы 44, 47, управляющие сигналы с соответствующих выходов которых поступают в исполнительные механизмы, корректирующие перемещение управляемого объекта в точку, наблюдаемую оператором. Заявляемая система управления выполняет управление объектом с разрешением 10000 местоположений его в поле зрения /100×100/ против 496 /16×31/ в прототипе.
Использованные источники
1. Патент №2332699 C1, кл. G05B 15/00. Бюл. №24 от 27.08.08, прототип.
2. Мураховский В.И. Устройство компьютера. М, 2003, с.552.
3. Колесниченко О.В, Шишигин И.В. Аппаратные средства РС. 5-е изд. СПб, 2004, с.832, рис.21.12.
4. Шумилин и др. Радиопередающие устройства. М, 1981, с.234-235.
5. Радиосвязь, вещание и телевидение. Под ред. А.Д.Фортушенко. М., 1981, с.146.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ГРУППЫ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2451317C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2431173C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2414737C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2010 |
|
RU2420025C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 2011 |
|
RU2481726C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 2011 |
|
RU2483466C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 2011 |
|
RU2477578C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2007 |
|
RU2356179C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2013 |
|
RU2525757C1 |
Изобретение относится к технике радиосвязи и может быть использовано для дистанционного управления движением наземными и воздушными объектами. Техническим результатом является повышение точности управления путем увеличения разрешающей способности при определении координат. Он достигается тем, что в известной системе управления в устройство определения координат вводится датчик координат, содержащий последовательно соединенные матрицу ПЗИ /прибор с зарядовой инжекцией/ и импульсный усилитель, и последовательно соединенные генератор тактовых импульсов, делитель частоты и первый ключ, второй, третий и четвертый ключи, первый и второй счетчики импульсов, первый и второй дешифраторы. 7 ил., 1 табл.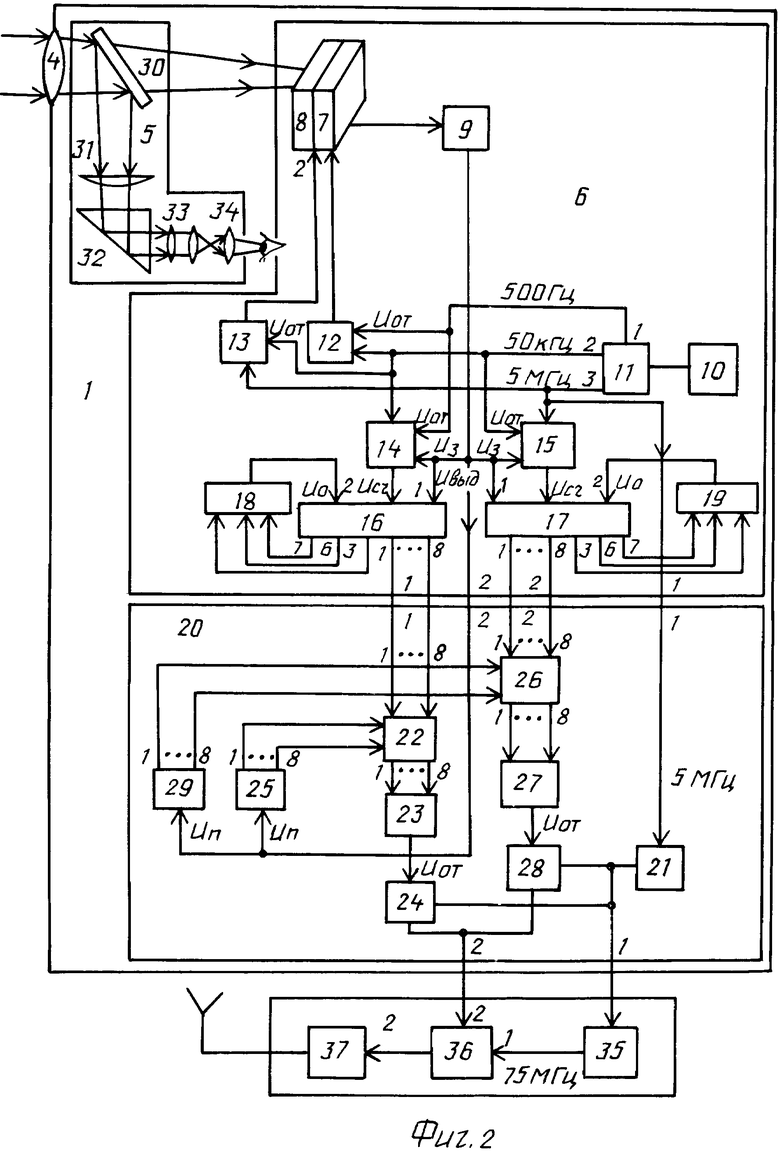
Система управления, содержащая устройство определения координат, передатчик радиосигналов и размещаемые на управляемом объекте приемную часть и излучатель, устройство определения координат включает объектив, зрительную трубу, расположенную после объектива, и формирователь кодов управляющих сигналов, зрительная труба включает последовательно размещенные полупрозрачное зеркало, расположенное под углом 45° к оптической оси объектива, полевую линзу с перекрестием на ней, расположенную в фокальной плоскости объектива, и оптическая ось которой перпендикулярна оптической оси объектива, прямоугольную призму, оборачивающую систему и окуляр, оптические оси оборачивающей системы и окуляра перпендикулярны оптической оси полевой линзы и параллельны оптической оси объектива, формирователь кодов управляющих сигналов включает генератор синусоидальных колебаний и два идентичных канала, входы которых являются первым и вторым информационными входами формирователя кодов управляющих сигналов, а выходы их объединены, первый канал включает последовательно соединенные первый блок элементов И, первые входы которых являются первым информационным входом формирователя кодов управляющих сигналов, элемент ИЛИ и первый выходной ключ, и первый самоходный распределитель импульсов, выходы которого подключены к вторым входам первого блока элементов И, второй канал включает последовательно соединенные второй блок элементов И, первые входы которых являются вторым информационным входом формирователя кодов управляющих сигналов, элемент ИЛИ и второй выходной ключ и второй самоходный распределитель импульсов /СРИ/, выходы которого подключены к вторым входам второго блока элементов И, выходы первого и второго выходных ключей объединены и являются вторым выходом формирователя кодов управляющих сигналов, первым выходом которого является выход генератора синусоидальных колебаний, подключенный также к сигнальным входам первого и второго выходных ключей, первым управляющим входом формирователя кодов управляющих сигналов является вход генератора синусоидальных колебаний, передатчик радиосигналов включает последовательно соединенные генератор несущей частоты, вход которого подключен к первому выходу формирователя кодов управляющих сигналов, амплитудный модулятор, второй вход которого подключен к второму выходу формирователя кодов управляющих сигналов, выходной усилитель и антенну, приемная часть включает последовательно соединенные антенну, блок приема радиосигналов, усилитель радиочастоты и двухполярный амплитудный детектор, синтезатор частот, первый выход которого подключен к второму входу блока приема радиосигналов, и два канала, первый канал включает последовательно соединенные первый формирователь импульсов, вход которого подключен к первому выходу двухполярного амплитудного детектора, регистр и дешифратор, выходы которого являются первыми выходами приемной части, второй канал включает последовательно соединенные второй формирователь импульсов, вход которого подключен к второму выходу двухполярного амплитудного детектора, регистр и дешифратор, выходы которого являются вторыми выходами приемной части, первые управляющие входы регистров объединены и подключены к второму выходу синтезатора частот, к третьему выходу которого подключены вторые управляющие входы регистров, а вход синтезатора частот подключен к выходу первого формирователя импульсов, излучатель закрепляется на объекте управления, включает один или несколько светодиодов, отличающаяся тем, что в устройство определения координат введен датчик координат, а светодиоды излучателя со стороны излучения имеют красные светофильтры, датчик координат содержит последовательно соединенные матрицу ПЗИ /прибор с зарядовой инжекцией/, фоточувствительная сторона которой расположена после полупрозрачного зеркала зрительной трубы и в фокальной плоскости объектива, на фоточувствительной стороне матрицы ПЗИ расположен красный светофильтр, и импульсный усилитель и содержит последовательно соединенные генератор тактовых импульсов, делитель частоты и первый ключ, второй, третий и четвертый ключи, первый и второй счетчики импульсов, первый и второй дешифраторы, первый выход делителя частоты подключен к управляющему входу первого ключа и к первому управляющему входу третьего ключа, второй выход делителя частоты подключен к сигнальному входу первого ключа, к управляющему входу второго ключа, к сигнальному входу третьего ключа и к первому управляющему входу четвертого ключа, третий выход делителя частоты подключен к сигнальному входу второго ключа, к сигнальному входу четвертого ключа и является первым управляющим выходом датчика координат, сигнальный вход первого счетчика импульсов подключен к выходу третьего ключа, сигнальный вход второго счетчика импульсов подключен к выходу четвертого ключа, первые управляющие входы /Uвыд/ обоих счетчиков импульсов и вторые управляющие входы третьего и четвертого ключей объединены, подключены к выходу импульсного усилителя и являются вторым управляющим выходом датчика координат, выходы третьего, шестого и седьмого разрядов первого счетчика импульсов подключены к первому - третьему входам первого дешифратора, выход которого подключен к второму управляющему входу /Uо/ первого счетчика импульсов, первый - восьмой выходы которого являются первыми выходами датчика координат, вторыми выходами которого являются первый - восьмой выходы второго счетчика импульсов, выходы третьего, шестого и седьмого разрядов второго счетчика импульсов подключены к первому - третьему входам второго дешифратора, выход которого подключен к второму управляющему входу второго счетчика импульсов, выходы первого и второго ключей подключены соответственно к первому и второму входам матрицы ПЗИ, первые - восьмые первые и первые - восьмые вторые выходы датчика координат подключены соответственно к первому и второму информационным входам формирователя кодов управляющих сигналов, в котором объединенные входы первого и второго СРИ являются вторым управляющим входом и подключены к второму управляющему выходу датчика координат.
| СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2332699C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 2004 |
|
RU2273048C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 1992 |
|
RU2029369C1 |
| DE 10237952 A1, 11.03.2004. | |||

