Изобретение относится к области приборостроения и может быть использовано для дистанционного управления движением группы наземных, надводных или воздушных управляемых объектов.
За прототип принят способ, реализованный в “Системе управления” [1], использующей получение двоичных кодов координат Х, Y трехцветного излучателя управляемого объекта в поле зрения объектива устройства определения координат, выполняющий замену в кодах символов единиц с импульсов на положительные /коорд.Х/ и отрицательные /коорд.Y/ полусинусоиды моночастоты, модулирующие несущую частоту в передатчике радиосигналов, излучающий в одной посылке координаты Х и Y, принимаемые приемной частью на управляемом объекте, возвращая символы единиц вновь в импульсы, и выдающей коды координат в исполнительные механизмы управляемого объекта, корректирующие его направление перемещения в место наведения. Прототипом системы принята “Система управления” [1], содержащая устройство определения координат, передатчик радиосигналов и расположенные на управляемом объекте приемную часть и трехцветный излучатель. Устройство определения координат включает объектив, зрительную трубу, датчик координат и формирователь кодов, передатчик радиосигналов содержит генератор несущей частоты, амплитудный модулятор и выходной усилитель. Приемная часть размещается в корпусе управляемого объекта и включает антенну, блок выбора частот, блок приема радиосигналов, усилитель радиочастоты, двухполярный амплитудный детектор, синтезатор частот и два идентичных канала, каждый из которых включает формирователь импульсов и девятиразрядный регистр. Трехцветный излучатель размещен на заднем торце корпуса управляемого объекта и состоит из трех сверхъярких светодиодов белого излучения, один из них имеет красный светофильтр, второй зеленый, третий - синий. Оператор наводит перекрестие зрительной трубы в точку наведения управляемого объекта и запускает управляемый объект. Датчик координат с частотой 50 Гц выдает текущие координаты Х, Y управляемого объекта в амплитудный модулятор передатчика радиосигналов, который излучает посылки кодов Х, Y в приемную часть управляемого объекта, выдаваемые в исполнительные механизмы объекта, корректирующие направление перемещения управляемого объекта по визирной линии в место наведения перекрестия зрительной трубы. Недостаток прототипов способа и системы управления один и тот же: управление только одним управляемым объектом.
Цель изобретения - одновременное наведение в место доставки группы управляемых объектов.
Техническим результатом является расширение функциональных возможностей системы одновременным наведением в место назначения группы управляемых объектов.
Заявляемый способ наведения группы управляемых объектов включает:
- разделение группы управляемых объектов на ведущий управляемый объект, двигающийся впереди группы, и ведомые управляемые объекты,
- получение устройством определения координат Х, Y в двоичных кодах трехцветного излучателя, размещаемого на тыльной стороне корпуса ведущего управляемого объекта с заменой в кодах символов единиц с импульсов на положительные /координата Х/ и отрицательные /координата Y/ полусинусоиды моночастоты, модулирующие несущую частоту в передатчике радиосигналов, излучающий в одной посылке координаты Х, Y, принимаемые приемной частью ведущего управляемого объекта, возвращающей символы единиц с полусинусоид в импульсы кодов, выдаваемые в исполнительные механизмы ведущего управляемого объекта, корректирующие его направление движения в наведенную точку доставки,
- получение в каждом ведомом управляемом объекте поправок за внецентренность относительно трехцветного излучателя ведущего управляемого объекта, выдаваемые в свои исполнительные механизмы, корректирующие направление перемещения каждого ведомого управляемого объекта соответственно направления ведущего управляемого объекта, двигающегося впереди всей группы управляемых объектов.
Сущность заявляемого способа в том, что в группе управляемых объектов принимается разделение на ведущий управляемый объект и ведомые управляемые объекты, получение кодов координат Х, Y ведущего управляемого объекта по его трехцветному излучателю устройством определения координат с корректировкой по ним его направления движения по линии визирования устройства определения координат. Формирование каждым ведомым управляемым объектом поправок за внецентренность относительно трехцветного излучателя на ведущем управляемом объекте, используемых для корректировки направления движения каждого ведомого управляемого объекта соответственно направления движения ведущего управляемого объекта.
Сущность заявляемой системы наведения в том, что группа управляемых объектов подразделяется на ведущий управляемый объект и соответствующее число ведомых управляемых объектов, в систему, содержащую устройство определения координат, передатчик радиосигналов, приемную часть и трехцветный излучатель, вводятся в устройство определения координат трехразрядный регистр, приемная часть и трехцветный излучатель размещаются на ведущем управляемом объекте, в первый и второй каналы приемной части вводятся последовательно соединенные двенадцатиразрядный регистр и дешифратор, и каждый ведомый управляемый объект содержит блок определения поправок за внецентренность.
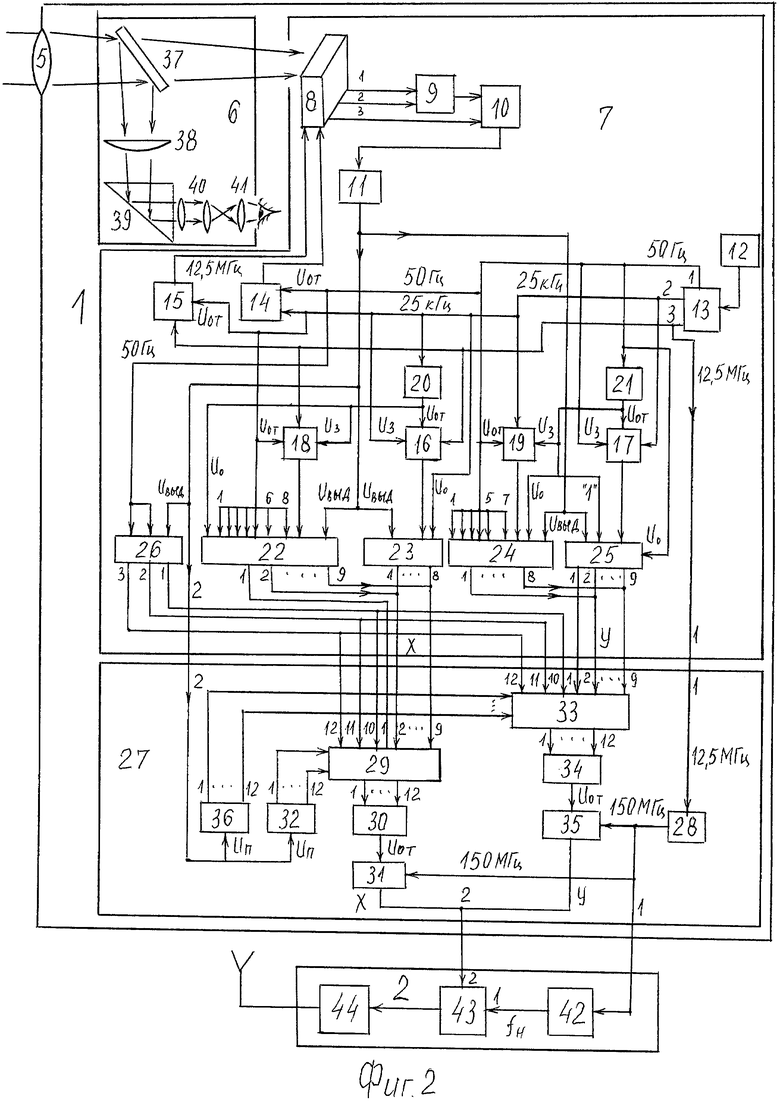
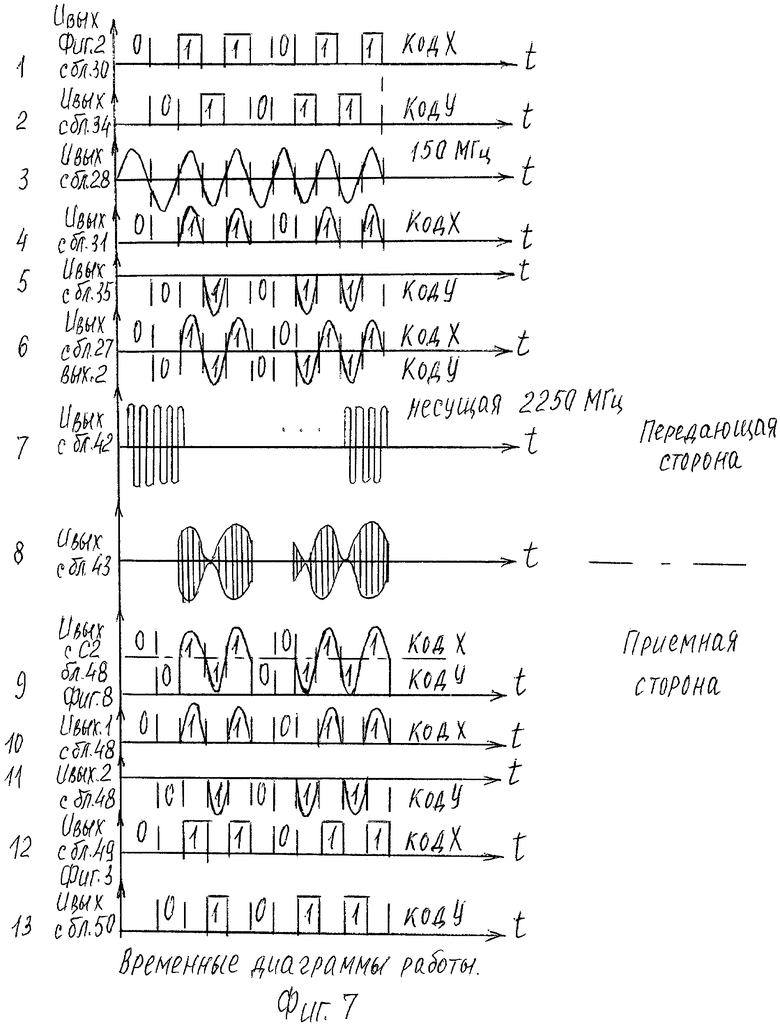
Заявляемая система наведения (см. фиг.1) содержит устройство 1 определения координат, передатчик 2 радиосигналов, приемную часть 3 и трехцветный излучатель 4. Устройство 1 определения координат и передатчик 2 радиосигналов на фиг.2, приемная часть, размещаемая на ведущем управляемом объекте на фиг.3, принцип получения координат Х, Y на фиг.4, размещение кода координат Х/Y/ и кода опознания в регистре приемной части на фиг.5, спектр амплитудно-модулированного сигнала на фиг.6, временные диаграммы работы системы наведения на фиг.7, схема двухполярного амплитудного детектора на фиг.8, блок определения поправок за внецентренность на фиг.9.
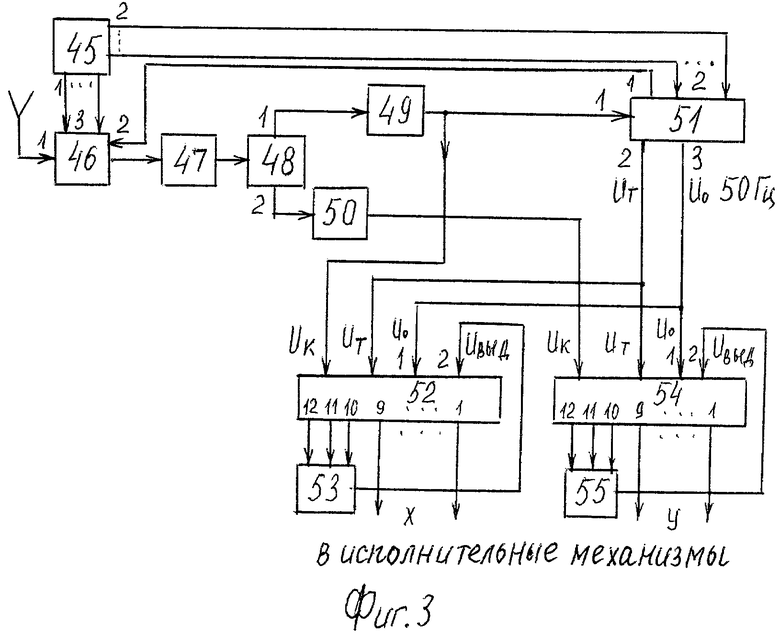
Устройство 1 определения координат /фиг.2/ содержит объектив 5 с соответствующим полем зрения, зрительную трубу 6, датчик 7 координат, включающий матрицу 8 приборов с зарядовой инжекцией /ПЗИ 8/ из трехслойного датчика КМОП [2, с.832, рис.21.12] с оптическим разрешением 500×500 пикселов, фоточувствительная сторона матрицы ПЗИ 8 расположена после зрительной трубы 6 в фокальной плоскости объектива 5, первый элемент И 9, первый и второй входы которого подключены к первому и второму выходам матрицы ПЗИ 8, второй элемент И 10, один вход его подключен к третьему выходу матрицы ПЗИ 8, второй вход подключен к выходу элемента И 9, импульсный усилитель 11, вход которого подключен к выходу второго элемента И 10, содержит последовательно соединенные генератор 12 тактовых импульсов 12,5 МГц, делитель 13 частоты и первый ключ 14, второй 15, третий 16, четвертый 17, пятый 18 и шестой 19 ключи, первый элемент 20 задержки импульса строки на первую половину 20 мкс периода 40 мкс строки, второй элемент 21 задержки импульса кадра на первую половину 10 мс периода кадра /20 мс/, первый вычитающий счетчик 22 импульсов из девяти разрядов, первый восьмиразрядный счетчик 23 импульсов, второй вычитающий счетчик 24 импульсов из восьми разрядов, второй счетчик 25 импульсов из девяти разрядов, в датчик 7 координат введен трехразрядный регистр 26, формирующий код 110 /6/ опознания принадлежности координат ведущему управляемому объекту. Выходы со второго по девятый разрядов первого вычитающего счетчика 22 импульсов и выходы с первого по восьмой разрядов первого счетчика 23 импульсов поразрядно объединены, вместе с выходом первого разряда /знак минус/ первого вычитающего счетчика 22 импульсов и вместе с выходами первого-третьего разрядов регистра 26 составляют первую группу первого-двенадцатого выходов датчика 7 координат, выходы со второго по девятый разрядов второго счетчика 25 импульсов и выходы с первого по восьмой разрядов второго вычитающего счетчика 24 импульсов поразрядно объединены, вместе с выходом первого разряда /знак минус кода/ второго счетчика 25 импульсов и вместе с выходами первого-третьего разрядов регистра 26 составляют вторую группу первого-двенадцатого датчика 7 координат. Первым управляющим выходом датчика 7 координат является третий выход 12,5 МГц делителя 13 частоты, вторым управляющим выходом датчика 7 координат является выход импульсного усилителя 11. Устройство 1 определения координат включает формирователь 27 кодов, включающий генератор 28 синусоидальных колебаний 150 МГц и два идентичных канала, входы которых являются первым и вторым информационными входами /12×2/ формирователя 27 кодов, а выходы их объединены и являются вторым выходом формирователя 27 кодов, первым выходом которого является выход генератора 28 синусоидальных колебаний. Первый канал включает последовательно соединенные первый блок 29 импульсов И из двенадцати элементов И, первый элемент ИЛИ 30 и первый выходной ключ 31, и первый самоходный распределитель 32 импульсов /СРИ/, имеющий двенадцать выходов. Второй канал включает последовательно соединенные второй блок 33 элементов И из двенадцати элементов И, второй элемент ИЛИ 34 и второй выходной ключ 36, и второй СРИ 36, имеющий двенадцать выходов, подключенные к вторым входам элементов И в блоке 33. Генератор 28 синусоидальных колебаний подключен к первому управляющему выходу датчика 7 координат и формирует из тактовых импульсов 12,5 МГц синусоидальные колебания частотой 150 МГц /12,5 МГц × 12/. Синусоидальные колебания 150 МГц поступают на сигнальные входы выходных ключей 31, 35, выходы которых объединены и являются вторым выходом устройства 1 определения координат, первым выходом которого является выход 150 МГц с генератора 28 синусоидальных колебаний. Управляющие входы СРИ 32 и 36 объединены и подключены к второму управляющему выходу датчика 7 координат, сигнал с которого Uп запускает СРИ 32, 36 в работу [3, с.269, 274]. Первый выход 50 Гц делителя 13 частоты подключен параллельно к управляющему входу Uот первого ключа 14, к входу второго элемента 21 задержки, к первому управляющему входу Uот шестого ключа 19, к входам с первого по пятый и седьмому разрядов второго вычитающего счетчика 24 импульсов, к второму управляющему входу Uз четвертого ключа 17, к второму управляющему входу Uo второго счетчика 25 импульсов и к входам первого и второго разрядов регистра 26. Второй выход 25 кГц делителя частоты 13 подключен параллельно к сигнальному входу первого ключа 14, к управляющему входу Uот второго ключа 15, к сигнальному входу четвертого ключа 17, к первому управляющему входу Uот пятого ключа 18, к входам с первого по шестой и восьмому разрядов первого вычитающего счетчика 22 импульсов, к входу первого элемента 20 задержки, к второму управляющему Uo входу первого счетчика 23 импульсов, к второму управляющему Uз входу третьего ключа 16. Третий выход 12,5 МГц делителя 13 частоты подключен параллельно к сигнальным входам второго ключа 15, третьего ключа 16, пятого ключа 18 и является первым управляющим выходом датчика 7 координат. Счетные входы подключены: первого вычитающего счетчика 22 импульсов к выходу пятого ключа 18, первого счетчика 23 импульсов к выходу третьего ключа 16, второго вычитающего счетчика 24 импульсов к выходу шестого ключа 19, второго счетчика 25 импульсов к выходу четвертого ключа 17. Выход импульсного усилителя 11 подключен параллельно к управляющим входам Uвыд первого вычитающего счетчика 22 импульсов и первого счетчика 23 импульсов, второго вычитающего счетчика 24 импульсов и второго счетчика 25 импульсов, к управляющему Uвыд входу регистра 26 и является вторым управляющим выходом 7 координат. Выходы ключей 14 и 15 подключены к соответствующим входам матрицы ПЗИ 8. Выход первого элемента 20 задержки подключен к первому управляющему входу Uот третьего ключа 16, к второму управляющему входу Uз пятого ключа 18 и к управляющему входу Uo первого вычитающего счетчика 22 импульсов. Выход второго элемента 21 задержки подключен к первому управляющему Uот входу четвертого ключа 17, к второму управляющему Uз входу шестого ключа 19, к управляющему входу Uo второго вычитающего счетчика 24 импульсов и к входу первого разряда “1” /знак минус кода/ второго счетчика 25 импульсов. Зрительная труба 6 /фиг.2/ расположена после объектива 5 и перед датчиком 7 координат и включает последовательно расположенные полупрозрачное зеркало 37, расположенное под углом 45° к оптической оси объектива 5, полевую линзу 38 с перекрестием на ней, расположенную в фокальной плоскости объектива 5, и оптическая ось которой перпендикулярна оптической оси объектива 5, прямоугольную призму 39, оборачивающую систему 40 и окуляр 41. Оптические оси оборачивающей системы 40 и окуляра 41 перпендикулярны оптической оси полевой линзы 38 и параллельны оптической оси объектива 5. Передатчик 2 радиосигналов /фиг.2/ включает последовательно соединенные генератор 42 несущей частоты, вход которого подключен к первому выходу /150 МГц/ устройства 1 определения координат /к первому входу формирователя 27 кодов/, амплитудный модулятор 43, второй вход которого подключен к второму выходу формирователя 27 кодов, и выходной усилитель 44. Посылка с передатчика 2 радиосигналов представляет код, включающий две части: последние три разряда 10-12 посылки представляют код опознания ведущего управляемого объекта, первые девять разрядов 1-9 представляют код координаты Х или Y. Приемная часть 3 /фиг.3/ размещена в корпусе ведущего управляемого объекта и включает антенну, блок 45 выбора частоты, последовательно соединенные блок 46 приема радиосигналов, усилитель 47 радиочастоты и двухполярный амплитудный детектор 48, синтезатор 51 частот и два идентичных канала. Первый канал включает последовательно соединенные первый формирователь 49 импульсов, вход которого подключен к первому выходу двухполярного амплитудного детектора 48, двенадцатиразрядный регистр 52 и дешифратор 53, первый-третий входы которого подключены к выходам соответственно десятого-двенадцатого разрядов регистра 52, выход дешифратора 53 подключен к второму управляющему входу Uвыд регистра 52 и выдает код координаты из первого-девятого разрядов, которые являются информационными выходами приемной части 3 /координата Х/. Второй канал включает второй формирователь 50 импульсов, вход которого подключен к второму выходу двухполярного амплитудного детектора 48, двенадцатиразрядный регистр 54 и дешифратор 55, три входа которого подключены к выходам 10-12 разрядов регистра 54, выход дешифратора 55 подключен к второму управляющему Uвыд входу регистра 54 и выдает из его первого-девятого разрядов код координаты Y, первый-девятый разряды регистра 54 являются информационными выходами приемной части /координата Y/. Управляющие тактовые входы регистров 52, 54 объединены и подключены к второму /тактовому/ выходу синтезатора 51 частот, третий выход Uo /50 Гц/ которого подключен к объединенным первым управляющим входам Uo обоих регистров 52, 54, обнуляющим все первый-двенадцатый разряды регистров для приема следующих кодов координат Х, Y. Излучатель 4 /фиг.1/ крепится на заднем торце корпуса ведущего управляемого объекта и включает, как в прототипе, три сверхъярких светодиода белого излучения: один светодиод имеет красный светофильтр, второй - зеленый, третий - синий.
Генератор 12 тактовых импульсов обеспечивает устройство 1 тактовыми импульсами со стабильностью 10-6.
fт=50 Гц×500×500=12,5 МГц.
где 50 Гц - частота сканирования матрицы ПЗИ 8, частота кадров,
500 - число строк в матрице ПЗИ 8, разрешение по координате Y,
500 - число отсчетов в строке, разрешение по координате Х.
Делитель 13 частоты выдает с первого выхода импульсы 50 Гц частоты кадров /250000:1/, со второго выхода частоту строк 25 кГц /500:1/, с третьего выхода частоту 12,5 МГц импульсов /1:1/. Первый ключ 14 открывается на длительность кадра 20 мс передним фронтом импульса 50 Гц, в открытом состоянии ключ 14 пропускает на первый вход матрицы ПЗИ 8 импульсы вертикального считывания /координаты Y/ 25 кГц, закрывается ключ 14 задним фронтом импульса. Второй ключ 15 открывается передним фронтом импульса 25 кГц на длительность 40 мс строки и закрывается задним фронтом импульса, в открытом состоянии пропускает на второй вход матрицы ПЗИ 8 импульсы 12,5 МГц для горизонтального считывания сигналов пикселов по строке [2, с.832]. Объектив 5 создает трехцветное изображение излучателя 4 в трех слоях матрицы ПЗИ 8. Сигнал с импульсного усилителя 11 выдает из соответствующего вычитающего 22 /24/ счетчика импульсов и счетчика 23 /25/ импульсов коды координат Х и Y излучателя, расположенного на заднем торце корпуса ведущего управляемого объекта, и код опознания с регистра 26 в формирователь 27 кодов. С началом каждого кадра передний фронт импульса 50 Гц поступает в первый /старший/ и второй разряды регистра 26 и заносит в них сигналы единиц, в регистре 26 получается двоичный код 110 /6/, этот код представляет код опознания ведущего управляемого объекта, а значение 110 принято для примера, можно принять и другое значение кода от 001 до 111. Код опознания выдается синхронно с выдачей кодов координат сигналом Uвыд с импульсного усилителя 11 в формирователь 27 кодов и входит в первую и вторую группы выходами десятый, одиннадцатый и двенадцатый в формирователь 27 кодов. Код опознания при каждой посылке координат исключает влияние помех как со стороны шумов, так и специально направленных на срыв управления ведущим управляемым объектом, защищает достоверность передачи информации в приемную часть. В регистры 52, 54 /фиг.3/ полный код заполняет с первого по девятый разряды код координаты, а с десятого по двенадцатый разряды заполняет код опознания. Через разряды 10-12 сигналы кода опознания сразу же поступают на вход дешифратора 53 /55/. При правильном коде опознания 110 он дешифрируется дешифратором 53 и 55, на выходе их появляется сигнал, являющийся сигналом выдачи Uвыд, поступающим на второй управляющий вход в регистрах 52, 54 и выдает из них координаты Х и Y в исполнительные механизмы ведущего управляемого объекта. С приходом другого значения кода опознания он не дешифрируется дешифраторами 53, 55, координаты из регистров 52, 54 не выдаются, а по окончании кадра оба регистра 52, 54 обнуляются с третьего выхода синтезатора частот 51 сигналом Uo.
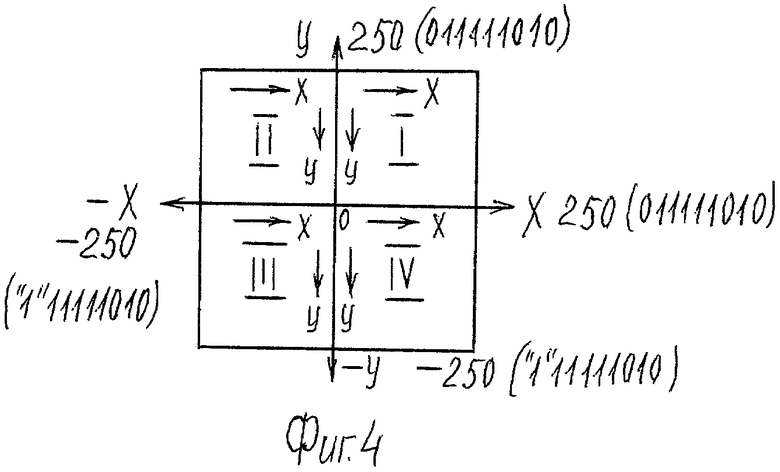
Считывание сигналов с пикселов матрицы ПЗИ 8 идет в строках слева направо /фиг.4/ координат Х, а в кадре сверху вниз - координаты Y. Формирование координат Х, фиг.4, 2.
Координаты Х во второй и третьей четвертях формируются относительно центра перекрестия поля зрения объектива от -250 /“1”11111010/ до нуля, в первой и четвертой четвертях от нуля до 250 /011111010/. С открытием перед фронтом импульса 25 кГц ключа 18 в разряды с первого по шестой и в восьмой первого вычитающего счетчика 22 импульсов сигналом Uот заносится код “1”11111010 /первая единица знак минус/, а импульсы 12,5 МГц, поступающие с ключа 18, вычитаются из занесенного кода в течение первой половины периода 0-20 мкс строки: формируются коды координаты Х во второй или третьей четвертях. С окончанием первой половины строки с элемента 20 задержки следует импульс, закрывающий ключ 18 и обнуляющий первый вычитающий счетчик 22 импульсов, сигналом Uот открывается ключ 16 на время второй половины периода строки 20-40 мкс, импульсы 12,5 МГц поступают с ключа 16 в первый счетчик 23 импульсов, который их суммирует во второй половине строки, формируются коды +Х с нуля до 250 /011111010/ в первой и четвертой четвертях. В момент сканирования излучателя 4 с выхода импульсного усилителя 11 следует импульс, являющийся сигналом Uвыд и выдает из вычитающего счетчика 22 импульсов координату -Х или из счетчика 23 импульсов координату +Х, и из регистра 26 код 110 опознания. Вычитающий счетчик 22 импульсов обнуляется каждый раз в конце первой половины периода строки сигналом Uo с выхода элемента 20 задержки, счетчик 23 импульсов обнуляется задним фронтом импульса 25 кГц.
Формирование координат Y.
Коды координат Y в первой и второй четвертях /фиг.4/ формируются от 250 /011111010/ до нуля, в третьей и четвертой от нуля до -250 /“1”11111010/. Передний фронт импульса 50 Гц открывает ключ 19 при этом в первый-пятый и в седьмой разряды второго вычитающего счетчика 24 импульсов заносятся сигналы кода 011111010 /250/, а поступающие в него импульсы 25 кГц вычитаются из занесенного кода, формируются коды Y от 250 /011111010/ до нуля в первой половине кадра от 0 до 10 мс. При сканировании изображения излучателя в первой половине кадра импульс с выхода импульсного усилителя 11 выдает из вычитающего счетчика 24 импульсов код Y, с окончанием первой половины периода кадра с выхода второго элемента 21 задержки сигнал Uo обнуляет разряды второго вычитающего счетчика 24 импульсов, открывает четвертый ключ 17 и заносит в первый разряд второго счетчика 25 импульсов сигнал знака минус. Счетчик 25 считает импульсы 25 кГц второй половины периода кадра 10-20 мс и формирует коды Y с нуля до -250 /“1”11111010/ в третьей и четвертой четвертях. С приходом сигнала с импульсного усилителя 11 со счетчика 25 выдается код Y. С окончанием второй половины периода кадра счетчик 25 обнуляется задним фронтом импульса 50 Гц.
Работа формирователя 27 кодов, фиг.2.
Формирователь 27 кодов преобразует параллельные коды в последовательные и замещает в них представление единиц с импульсов на положительные полусинусоиды в кодах координат Х и на отрицательные полусинусоиды в кодах координат Y. Временные диаграммы работы на фиг.7. Замена импульсов на полусинусоиды позволяет передавать коды на одной из боковых частот несущей в узкой полосе частот - 2100 Гц, определяемой только стабильностью несущей частоты 10-6. На первые входы элементов И блоков 29, 33 поступают импульсы кодов, на вторые их входы последовательно поступают двенадцать импульсов с самоходных распределителей 32, 36 импульсов, которые запускаются в работу сигналом Uп пуска с импульсного усилителя 11 [3, с.269, 274]. С выходов элементов И блоков 29, 33 импульсы кодов через элементы ИЛИ 30, 34 последовательно поступают на управляющие входы Uот выходных ключей 31, 35 и открывают их на время своей длительности 6,6 нс / /. Выходной ключ 31 в открытом состоянии пропускает одну положительную полусинусоиду моночастоты 150 МГц с генератора 28, выходной ключ 35 пропускает одну отрицательную полусинусоиду 150 МГц. С выходов выходных ключей 31, 35 на второй вход амплитудного модулятора 43 поступают полные или неполные синусоиды моночастоты 150 МГц, являющиеся модулирующим сигналом для несущей частоты и кратные к ней. Несущая частота формируется в блоке 42 умножением на 15
/. Выходной ключ 31 в открытом состоянии пропускает одну положительную полусинусоиду моночастоты 150 МГц с генератора 28, выходной ключ 35 пропускает одну отрицательную полусинусоиду 150 МГц. С выходов выходных ключей 31, 35 на второй вход амплитудного модулятора 43 поступают полные или неполные синусоиды моночастоты 150 МГц, являющиеся модулирующим сигналом для несущей частоты и кратные к ней. Несущая частота формируется в блоке 42 умножением на 15
fн=150 МГц×15=2250 МГц со стабильностью не хуже 10-6.
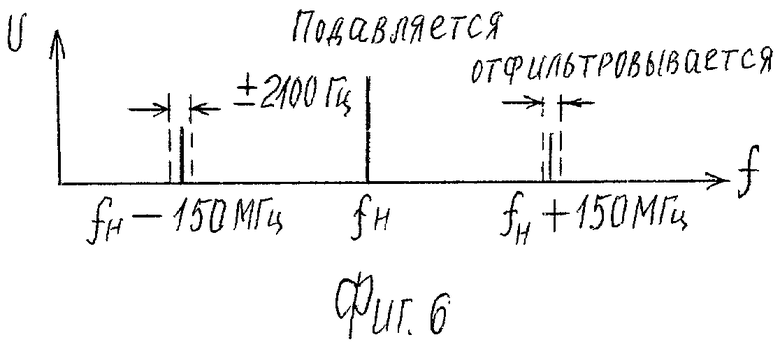
Амплитудный модулятор 43 содержит последовательно соединенные модулятор и полосовой фильтр [4, с.234]. Сама несущая и одна из ее боковых частот /фиг.6/ в информационном смысле являются избыточными, поэтому в амплитудном модуляторе 43 кольцевой модулятор подавляет несущую частоту 2250 МГц, а полосовой фильтр отфильтровывает ненужную верхнюю боковую частоту 2250 МГц + 150 МГц = 2400 МГц, для передачи кодов используется нижняя боковая частота
fнб=2250 МГц - 150 МГц = 2100 МГц.
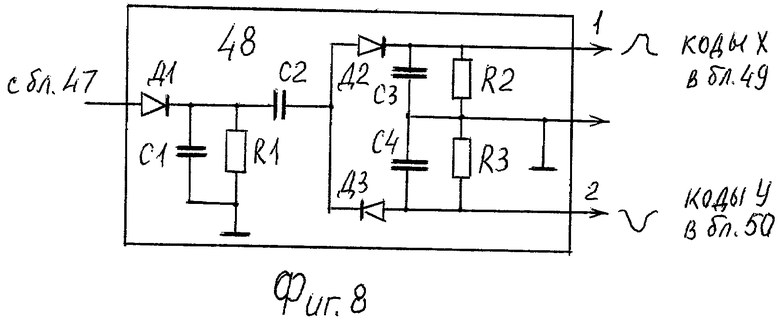
Нижняя боковая частота с информацией кодов координат Х, Y и кода опознания для ведущего управляемого объекта поступает в выходной усилитель 44 и излучается в эфир, занимаемая полоса в эфире ±2100 Гц или 4200 Гц. В приемной части 3 /фиг.3/ ведущего управляемого объекта в блоке 45 выбора частоты устанавливается соответствующее напряжение настройки [5, с.86-87], поступающее в блок 46 приема радиосигналов [5, с.132-134] и в синтезатор 51 частот. Радиосигналы принимаются антенной, поступают в блок 46 приема, являющийся селектором каналов с электронной настройкой с блока 45. Блок 46 включает входную цепь, усилитель радиочастоты со смесителем и полосовой фильтр [5, с.132]. Радиочастотный сигнал поступает на первый вход смесителя блока 46, на второй вход смесителя подается несущая частота с первого выхода синтезатора 51 частот, необходимая для детектирования однополосного сигнала /6, с.146/. Сигнал со смесителя, являющийся выходным сигналом блока 46, усиливается в усилителе 47 радиочастоты до необходимой величины и поступает на вход двухполярного амплитудного детектора 48, выполненного по схеме на фиг.8. Диод Д1 выделяет положительную огибающую модулирующего сигнала /фиг.7, диагр.9/, диод Д2 из модулирующей выделяет огибающие положительных полусинусоид символы единиц кодов Х /фиг.7, диагр.10/, диод Д3 из модулирующей выделяет огибающие отрицательных полусинусоид - символы единиц кодов Y /фиг.7, д.11/. С первого выхода блока 48 продетектированные положительные полусинусоиды частоты 150 МГц поступают на вход первого канала в формирователь 49 импульсов, со второго выхода блока 48 продетектированные отрицательные полусинусоиды 150 МГц поступают на вход второго канала в формирователь 50 импульсов. Формирователи 49, 50 импульсов выполнены по схеме несимметричного триггера с эмиттерной связью [7, с.209] и формируют прямоугольные импульсы из полусинусоид, импульсы имеют одну полярность и длительность, равную длительности импульсов в кодах формирователя 27 кодов. Единицы вновь представляются наличием импульса, нули - их отсутствием. Собственная стабильность частоты синтезатора 51 частот не хуже 10-6, точная подстройка его частоты к несущей частоте передатчика 2 радиосигналов выполняется по импульсам с формирователя 49 импульсов. Синтезатор 51 частот выдает: с первого выхода синусоидальные колебания соответственно несущей частоты на второй вход блока 46 приема радиосигналов, со второго выхода импульсы тактовой частоты 150 МГц - на тактовые входы регистров 52, 54, с третьего выхода сигналы Uo 50 Гц обнуления разрядов регистров 52, 54 - в конце каждого кадра. С выходов первого-девятого разрядов регистров 52, 54 с частотой 50 Гц выдаются коды координат Х, Y в исполнительные механизмы, которыми могут быть рулевые машинки [8, с.18-19], шаговые двигатели, струйные устройства [9, с.400-404], исполняющие корректировку направления перемещений /или полета/ управляемых объектов.
Работа системы наведения.
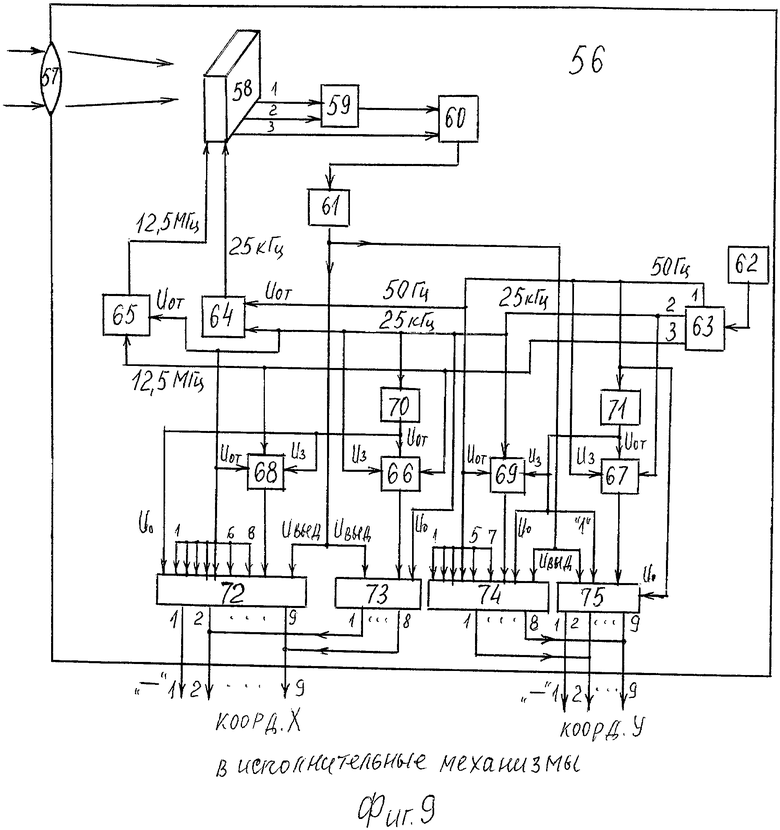
Зрительная труба 6 с объективом 5 выполняются в форме, удобной для расположения ее у глаза оператора, который через нее наводит перекрестие зрительной трубы в точку наведения. Перед запуском оператор устанавливает в блоке 45 соответствующую частоту приема, в данном случае - частоту 2100 МГц, включает питание в приемной части ведущего управляемого объекта и в ведомых управляемых объектах, наводит перекрестие зрительной трубы 6 в точку наводки ведущего управляемого объекта и нажимает кнопку “Пуск” в соответствующем запускаемом устройстве, выдающем два сигнала друг за другом: первый сигнал запускает ведущий управляемый объект, а после соответствующей задержки первого сигнала на определенную длительность, чтобы ведущий управляемый объект шел впереди, запускаются ведомые управляемые объекты. Датчик 7 координат с частотой 50 Гц выдает текущие координаты Х, Y излучателя ведущего управляемого объекта, излучаемые передатчиком 2 радиосигналов в приемную часть /фиг.1/ ведущего управляемого объекта, коды координат поступают в регистры 52, 54, с которых выдаются в исполнительные механизмы, корректирующие направление движения ведущего управляемого объекта в место наводки. В ведомых управляемых объектах блоки 56 /фиг.9/ определения поправок за внецентренность получают поправки за внецентренность /Х, Y/ относительно трехцветного излучателя 4 ведущего управляемого объекта и выдают коды поправок в свои исполнительные механизмы, выполняющие корректировки направлений движения каждого ведомого управляемого объекта по направлению движения ведущего управляемого объекта, то есть в то же место наведения. Блок 56 определения поправок на внецентренность размещен в передней части корпуса ведомого управляемого объекта и включает /фиг.9/ объектив 57 с соответствующим полем зрения, в фокальной плоскости которого расположена светочувствительная сторона матрицы ПЗИ 58 из трехслойного датчика КМОП с оптическим разрешением 500×500 пикселов, первый элемент И 59, первый и второй входы которого подключены к первому и второму выходам матрицы ПЗИ 58, второй элемент И 60, один вход его подключен к третьему выходу матрицы ПЗИ 58, второй вход подключен к выходу элемента И 59, импульсный усилитель 61, вход которого подключен к выходу второго элемента И 60, содержит последовательно соединенные генератор 62 тактовых импульсов 12,5 МГц, делитель 63 частоты, ключ первый 64, второй 65, третий 66, четвертый 67, пятый 68 и шестой 69, первый элемент 70 задержки импульса строки на первую половину 0-20 мкс периода строки, второй элемент 71 задержки импульса кадра на первую половину 0-10 мкс периода кадра /20 мс/, первый вычитающий счетчик 72 импульсов из девяти разрядов, первый восьмиразрядный счетчик 73 импульсов, второй вычитающий счетчик 74 из восьми разрядов и второй счетчик 75 импульсов из девяти разрядов. Выходы со второго по девятый разрядов первого вычитающего счетчика 72 импульсов и выходы с первого по восьмой разрядов счетчика 73 импульсов поразрядно объединены и вместе с выходом первого разряда /знак минус кода/ первого вычитающего счетчика 72 импульсов составляют первую группу выходов поправки по координате Х, выходы со второго по девятый разрядов второго счетчика 75 импульсов и выходы первый-восьмой разрядов второго вычитающего счетчика 74 импульсов поразрядно объединены и вместе с выходом первого разряда /знак минус кода/ второго счетчика 75 импульсов составляют вторую группу выходов - поправки по координате Y. Генератор 62 тактовых импульсов обеспечивает блок 56 тактовыми импульсами.
fт=50 ГЦ×500×500=12,5 МГц,
50 Гц - частота блокирования матрицы ПЗИ 58,
500 - число строк в матрице ПЗИ, разрешение по Y,
500 - число отсчетов в строке, разрешение по Х.
Делитель 63 частоты выдает с первого выхода импульсы 50 Гц частоты кадров, со второго выхода частоту строк 25 кГц /500:1/, с третьего выхода импульсы частотой 12,5 МГц /1:1/. Первый ключ 64 открывается на длительность кадра 20 мс передним фронтом импульса 50 Гц, в открытом состоянии ключ 64 пропускает на первый вход матрицы ПЗИ 58 импульсы вертикального считывания 25 кГц - поправки по Y, закрывается ключ 64 задним фронтом импульса. Второй ключ 65 открывается передним фронтом импульса строки 25 кГц на длительность ее 40 мкс и закрывается задним фронтом импульса, в открытом состоянии пропускает на второй вход матрицы ПЗИ 58 импульсы 12,5 МГц для горизонтального считывания сигналов пикселов по строке. Объектив 57 создает трехцветное изображение излучателя 4 в трех слоях матрицы 58. Сигнал с импульсного усилителя 61 выдает из вычитающего счетчика 72 /74/ импульсов и счетчика 73 /75/ импульсов коды поправок Х /Y/. Считывание сигналов с пикселов матрицы ПЗИ 58, как и в матрице ПЗИ 8 /фиг.4/, идет в строках слева направо - поправки Х, а в кадре сверху вниз - поправки Y. Получение поправок Х и Y в блоке 56 идет идентично, как и в датчике 7 координат, с.10-11. Поправки по координате Х во второй и третьей четвертях получаются относительно центра поля зрения объектива 57 от -250 /“1”11111010/ до нуля, в первой и четвертой четвертях от нуля до 250 /011111010/. С окончанием первой половины строки с элемента 70 следует импульс, закрывающий ключ 68 и обнуляющий первый вычитающий счетчик 72 импульсов, открывается ключ 66 на время второй половины периода строки 20-40 мкс, формируются поправки +Х с нуля по 250 /011111010/ в первой и четвертой четвертях. В момент сканирования излучателя 4 с выхода импульсного усилителя 61 следует импульс, являющийся сигналом выдачи Uвыд и выдает из счетчика 72 импульсов поправки -Х или из счетчика 73 импульсов поправки +Х. Поправки по координате У в первой и второй четвертях получаются от 250 /011111010/ до нуля, в третьей и четвертой четвертях от нуля до -250 /“1”11111010/. При сканировании изображения излучателя 4 в первой половине кадра импульс с импульсного усилителя 61 выдает из второго вычитающего счетчика 74 импульсов поправку +Y, во второй половине кадра импульс с импульсного усилителя 61 выдает из счетчика 75 импульсов поправку -Y. С окончанием второй половины кадра счетчик 75 обнуляется задним фронтом импульса 50 Гц.
Предлагаемая система наведения по заявляемому способу может быть использована для работы в труднодоступных местах, при решении определенных задач в боевой обстановке и на лунной поверхности при освоении Луны.
Источники информации
1. Патент РФ №2401450, кл. G05B 15/00, бюл. №28 от 10.10.10 г., прототип.
2. Колесниченко О.В., Шишигин И.В. Аппаратные средства РС. 5-е изд, СПб, 2004, с.832-833.
3. В.А.Ильин. Телеуправление и телеизмерение. М., 1982, с.269, 274.
4. Шумилин и др. Радиопередающие устройства. 1981, с.234-235.
5. Бродский М.А. Телевизоры цветного изображения. Справочное пособие, Минск, 1988, с.86, 87, с.132-134.
6. Радиосвязь, вещание и телевидение. Под ред. А.Д.Фортушенко, М., 1981, с.146.
7. В.Ф.Баркан, В.К.Жданов. Усилительная и импульсная техника. М., 1981, с.209.
8. Журналы “Техника молодежи” №6, 7, 8, 10, 2007, с.18-19 в каждом.
9. Справочник по средствам автоматики. Под ред. В.Э.Низэ, И.В.Антика, М., с.400-404.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ | 2010 |
|
RU2431173C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2414737C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2372640C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2010 |
|
RU2420025C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 2009 |
|
RU2413387C1 |
| УНИВЕРСАЛЬНАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 2011 |
|
RU2483466C1 |
| СИСТЕМА ТЕЛЕВИДЕНИЯ | 2008 |
|
RU2368097C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ СВЕТОВЫХ ОБЪЕКТОВ | 2009 |
|
RU2408899C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2008 |
|
RU2375841C1 |

Изобретение относится к области приборостроения, может быть использовано для дистанционного управления движением группы наземных, надводных, воздушных объектов. Техническим результатом является расширение функциональных возможностей системы наведения за счет одновременного наведения группы управляемых объектов. Способ содержит разделение группы управляемых объектов на ведущий и ведомые, получение кодов координат ведущего управляемого объекта для корректировки его направления движения и самостоятельное получение поправок за внецентренность в каждом ведомом управляемом объекте по излучателю ведущего управляемого объекта с корректировкой направлений движения по движению ведущего управляемого объекта. Сущность системы наведения в том, что в ее устройство определения координат вводится трехразрядный регистр, приемная часть и излучатель размещаются только на ведущем управляемом объекте, в первый и второй каналы приемной части вводятся двенадцатиразрядный регистр и дешифратор, а каждый ведомый управляемый объект содержит блок определения поправок за внецентренность. 2 н.п. ф-лы, 9 ил.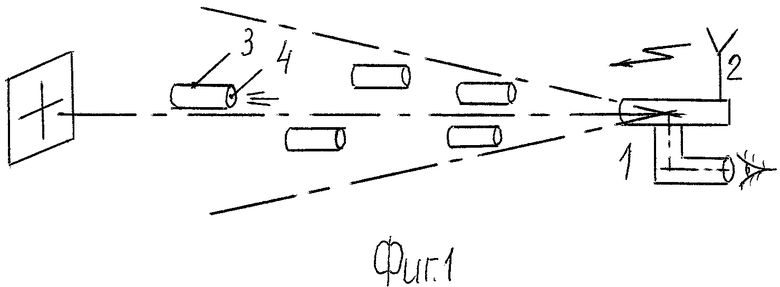
1. Способ наведения группы управляемых объектов, использующий получение устройством определения координат двоичных кодов X, Y трехцветного излучателя с заменой символов единиц в кодах с импульсов на положительные в координатах Х и отрицательные в координатах Y полусинусоиды моночастоты, модулирующие несущую частоту в передатчике радиосигналов, излучающем в одной посылке коды координат X, Y, принимаемые приемной частью управляемого объекта, восстанавливающей символы единиц с полусинусоид на импульсы в кодах, выдаваемые в исполнительные механизмы управляемого объекта, корректирующие его направление перемещения в место наведения, отличающийся тем, что группа управляемых объектов подразделяется на ведущий управляемый объект с приемной частью и трехцветным излучателем на задней стороне корпуса, и двигающийся впереди группы, и ведомые управляемые объекты, в каждом из которых определяются поправки за внецентренность относительно трехцветного излучателя ведущего управляемого объекта, выдаваемые в свои исполнительные механизмы, корректирующие направление движения каждого ведомого управляемого объекта соответственно направления двигающегося впереди группы ведущего управляемого объекта.
2. Система наведения, содержащая устройство определения координат, передатчик радиосигналов и размещаемые на управляемом объекте приемную часть и трехцветный излучатель, устройство определения координат включает объектив, зрительную трубу, датчик координат и формирователь кодов, зрительная труба расположена после объектива и содержит последовательно расположенные полупрозрачное зеркало, расположенное под углом 45° к оптической оси объектива, полевую линзу с перекрестием, расположенную в фокальной плоскости объектива, оптическая ось которой перпендикулярна оптической оси объектива, прямоугольную призму, оборачивающую систему и окуляр, оптические оси оборачивающей системы и окуляра перпендикулярны оптической оси полевой линзы и параллельны оптической оси объектива, датчик координат включает последовательно соединенные матрицу приборов с зарядовой инжекцией /ПЗИ/, фоточувствительная сторона которой расположена после полупрозрачного зеркала зрительной трубы и в фокальной плоскости объектива, первый элемент И, первый и второй входы которого подключены соответственно к первому и второму выходам матрицы ПЗИ, второй элемент И, первый вход которого подключен к третьему выходу матрицы ПЗИ, второй его вход подключен к выходу первого элемента И, и импульсный усилитель, вход которого подключен к выходу второго элемента И, содержащий последовательно соединенные генератор тактовых импульсов, делитель частоты и первый ключ, выход которого подключен к первому входу матрицы ПЗИ, второй ключ, выход которого подключен к второму входу матрицы ПЗИ, третий, четвертый, пятый и шестой ключи, первый и второй вычитающие счетчики импульсов, первый и второй счетчики импульсов, первый и второй элементы задержек, первый выход делителя частоты подключен параллельно к первым управляющим входам /Uo/ первого и шестого ключей, к входам первого-пятого и седьмого разрядов второго вычитающего счетчика импульсов, к входу второго элемента задержки и к управляющему входу /Uo/ второго счетчика импульсов, к второму управляющему входу /Uз/ четвертого ключа, второй выход делителя частоты подключен параллельно к сигнальному входу первого ключа, к первым управляющим входам второго и пятого ключей, к входам первого-шестого и восьмого разрядов первого вычитающего счетчика импульсов, к входу первого элемента задержки, к управляющему /Uo/ входу первого счетчика импульсов, к сигнальным входам четвертого и шестого ключей, к второму управляющему входу третьего ключа, третий выход /12,5 МГц/ делителя частоты подключен параллельно к сигнальным входам второго, третьего и пятого ключей и является первым управляющим входом в формирователь кодов, выход первого элемента задержки подключен к первому управляющему входу третьего ключа, к второму управляющему входу пятого ключа и к управляющему /Uo/ входу первого вычитающего счетчика импульсов, выход второго элемента задержки подключен к первому управляющему входу четвертого ключа, к второму управляющему входу шестого ключа, к управляющему /Uo/ входу второго вычитающего счетчика импульсов и к входу первого разряда второго счетчика импульсов, выход импульсного усилителя является вторым управляющим выходом в формирователь кодов и подключен параллельно к управляющим Uвыд входам второго вычитающего счетчика импульсов и второго счетчика импульсов, к управляющим Uвыд входам первого вычитающего счетчика импульсов и первого счетчика импульсов, выход третьего ключа подключен к счетному входу первого счетчика импульсов, выход четвертого ключа подключен к счетному входу второго счетчика импульсов, выход пятого ключа подключен к счетному входу первого вычитающего счетчика импульсов, выход шестого ключа подключен к счетному входу второго вычитающего счетчика импульсов, второй-девятый выходы первого вычитающего счетчика импульсов и первый-восьмой выходы первого счетчика импульсов поразрядно объединены и вместе с выходом первого разряда первого вычитающего счетчика импульсов являются первой группой первого-девятого выходов датчика координат /координата X/, второй-девятый выходы второго счетчика импульсов и первый-восьмой выходы второго вычитающего счетчика импульсов поразрядно объединены и вместе с выходом первого разряда /знак минус/ второго счетчика импульсов являются второй группой первого-девятого выходов датчика координат /координата Y/, формирователь кодов включает генератор синусоидальных колебаний, вход которого является первым управляющим входом формирователя кодов, и два идентичных канала, входы которых являются первым и вторым информационными входами формирователя кодов, а выходы их объединены, первый канал включает последовательно соединенные первый блок элементов И, первые входы которого являются первой информационной группой входов формирователя кодов, элемент ИЛИ и первый выходной ключ, и первый самоходный распределитель импульсов /СРИ/, выходы которого подключены к вторым входам блока элементов И, второй канал включает последовательно соединенные второй блок элементов И, первые входы которого являются второй информационной группой входов формирователя кодов, элемент ИЛИ и второй выходной ключ, и второй СРИ, выходы которого подключены к вторым входам второго блока элементов И, выходы первого и второго выходных ключей объединены и являются вторым входом формирователя кодов, первым выходом которого является выход генератора синусоидальных колебаний, который подключен параллельно и к сигнальным входам первого и второго выходных ключей, управляющие входы первого и второго СРИ объединены и подключены к второму управляющему входу формирователя кодов, передатчик радиосигналов включает последовательно соединенные генератор несущей частоты, вход которого подключен к первому выходу формирователя кодов, амплитудный модулятор, второй вход которого подключен к второму выходу формирователя кодов, выходной усилитель и антенну, приемная часть включает блок выбора частоты, последовательно соединенные антенну, блок приема радиосигналов, усилитель радиочастоты и двухполярный амплитудный детектор, и синтезатор частот, первый выход которого подключен к второму входу блока приема радиосигналов, первая группа выходов блока выбора частот подключена к третьей группе входов блока приема радиосигналов, вторая группа выходов блока выбора частот подключена к соответствующим входам второй группы входов синтезатора частот и включает два идентичных канала, первый из которых включает первый формирователь импульсов, вход которого подключен к первому выходу двухполярного амплитудного детектора, а выход его подключен к первому входу синтезатора частот, второй канал включает второй формирователь импульсов, вход которого подключен к второму выходу двухполярного амплитудного детектора, излучатель содержит три светодиода белого излучения, первый имеет красный светофильтр, второй - зеленый, третий - синий, отличающаяся тем, что в датчик координат устройства определения координат введен трехразрядный регистр, входы первого и второго разрядов которого подключены к первому выходу делителя частоты, а управляющий вход /Uвыд/ подключен к выходу импульсного усилителя, выходы первого-третьего разрядов трехразрядного регистра являются десятым-двенадцатым выходами в первой группе выходов датчика координат и параллельно являются десятым-двенадцатым выходами во второй группе выходов датчика координат, в формирователе кодов блоки элементов И в первом и втором каналах содержат по двенадцать элементов И, первые входы которых являются соответственно первой и второй информационными группами входов формирователя кодов, первый и второй самоходные распределители импульсов /CPИ/ имеют также по двенадцать выходов, которые подключены к соответствующим вторым входам двенадцати элементов И соответственно в первом и втором блоках элементов И, приемная часть системы наведения и трехцветный излучатель размещены на ведущем управляемом объекте группы управляемых объектов, остальные из которых являются ведомыми управляемыми объектами, в первый канал приемной части введены последовательно соединенные двенадцатиразрядный регистр и дешифратор, первый-третий входы которого подключены к выходам соответственно десятого-двенадцатого разрядов двенадцатиразрядного регистра, а выход дешифратора подключен к второму управляющему /Uвыд/ входу двенадцатиразрядного регистра, информационный и тактовый входы которого подключены соответственно к выходу первого формирователя импульсов и к второму выходу синтезатора частот, информационными выходами первого канала являются выходы первого-девятого разрядов двенадцатиразрядного регистра - координата X, во второй канал введены последовательно соединенные двенадцатиразрядный регистр и дешифратор, первый-третий входы которого подключены к выходам десятого-двенадцатого разрядов двенадцатиразрядного регистра, выход дешифратора подключен к второму управляющему Uвыд входу двенадцатиразрядного регистра, информационный и тактовый входы двенадцатиразрядного регистра подключены соответственно к выходу второго формирователя импульсов и к второму выходу синтезатора частот, информационными выходами второго канала являются выходы первого-девятого разрядов двенадцатиразрядного регистра - координата Y, первые управляющие входы Uo обоих двенадцатиразрядных регистров объединены и подключены к третьему выходу синтезатора частот, каждый из ведомых управляемых объектов содержит блок определения поправок за внецентренность, которые идентичны, блок определения поправок за внецентренность включает объектив с соответствующим полем зрения, матрицу ПЗИ, фоточувствительная сторона которой расположена в фокальной плоскости объектива, первый элемент И, первый и второй входы которого подключены соответственно к первому и второму выходам матрицы ПЗИ, второй элемент И, первый вход которого подключен к третьему выходу матрицы ПЗИ, второй его вход подключен к выходу первого элемента И, и импульсный усилитель, вход которого подключен к выходу второго элемента И, содержит последовательно соединенные генератор тактовых импульсов, делитель частоты и первый ключ, выход которого подключен к первому входу матрицы ПЗИ, второй ключ, выход которого подключен к второму входу матрицы ПЗИ, третий, четвертый, пятый и шестой ключи, первый и второй вычитающие счетчики импульсов, первый и второй счетчики импульсов, первый элемент задержки, второй импульс задержки, первый выход делителя частоты /50 Гц/ подключен параллельно к первым управляющим входам /Uот/ первого и шестого ключей, к входам первого-пятого и седьмого разрядов второго вычитающего счетчика импульсов, к входу второго элемента задержки и к управляющему входу Uo второго счетчика импульсов, к второму управляющему /Uз/ входу четвертого ключа, второй выход /25 кГц/ делителя частоты подключен параллельно к сигнальному входу первого ключа, к первым управляющим входам /Uoт/ второго и пятого ключей, к входам первого-шестого и восьмого разрядов первого вычитающего счетчика импульсов, к входу первого элемента задержки, к управляющему /Uo/ входу первого счетчика импульсов, к сигнальным входам четвертого и шестого ключей, к второму управляющему /Uз/ входу третьего ключа, третий ключ /12,5 МГц/ делителя частоты подключен параллельно к сигнальным входам второго, третьего и пятого ключей, выход первого элемента задержки подключен к первому управляющему входу третьего ключа, к второму управляющему входу пятого ключа и к управляющему входу /Uo/ первого вычитающего счетчика импульсов, выход второго элемента задержки подключен к первому управляющему входу четвертого ключа, к второму управляющему входу шестого ключа, к управляющему /Uo/ входу второго вычитающего счетчика импульсов и к входу первого разряда /минус кода/ второго счетчика импульсов, выход импульсного усилителя подключен параллельно к управляющим входам Uвыд второго вычитающего счетчика импульсов и второго счетчика импульсов, к управляющим Uвыд входам первого вычитающего счетчика импульсов и первого счетчика импульсов, выход третьего ключа подключен к счетному входу первого счетчика импульсов, выход четвертого ключа подключен к счетному входу второго счетчика импульсов, выход пятого ключа подключен к счетному входу первого вычитающего счетчика импульсов, выход шестого ключа подключен к счетному входу второго вычитающего счетчика импульсов, выходы второго-девятого разрядов первого вычитающего счетчика импульсов и выходы первого-восьмого разрядов первого счетчика импульсов поразрядно объединены и вместе с выходом первого разряда /знак минус/ первого вычитающего счетчика импульсов являются выходами поправки за внецентренность /координата X/, выходы второго-девятого разрядов второго счетчика импульсов и выходы первого-восьмого разрядов второго вычитающего счетчика импульсов поразрядно объединены и вместе с выходом первого разряда /знак минус/ второго счетчика импульсов являются выходами поправки за внецентренность /координата Y/.
| СИСТЕМА УПРАВЛЕНИЯ | 2009 |
|
RU2401450C1 |
| СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2332699C1 |
| ПАРАВИЗУАЛЬНЫЙ ИНДИКАТОР ОТКЛОНЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2003 |
|
RU2250508C2 |
| US 5235513 A, 10.08.1993. | |||

