Изобретение относится к захватывающему устройству, применяемому, например, в транспортировочном и обрабатывающем оборудовании для захвата и перемещения продуктов.
Известно большое количество захватывающих устройств такого типа, часто выполняемых в форме захватывающих головок, в которые объединено большое количество единичных захватов, нередко имеющих вид присасывающих головок. Захваты устанавливаются на раме, вместе с которой они перемещаются, т.е., в частности, опускаются на продукты, которые необходимо захватить, поднимаются с захваченными продуктами и перемещаются в сторону. Для выполнения этой функции расстояние между захватами должно точно соответствовать расстоянию между перемещаемыми продуктами. Однако возможны такие задачи по транспортировке и переносу, в которых расстояние между продуктами необходимо уменьшать или увеличивать.
Задачей настоящего изобретения является создание конструктивно простого и эффективного устройства, позволяющего изменять расстояние между захватами.
Даная задача решается путем создания устройства, признаки которого изложены в п.1 формулы изобретения.
В соответствии с предложенным вариантом реализации настоящего изобретения указанное изменение расстояния осуществляется захватывающим устройством, с которым так или иначе перемещаются объекты. Поэтому приведенный вариант реализации изобретения особенно предпочтителен для выполнения задач по транспортировке, в которых требуется высокая скорость перемещения, например, при транспортировке пакетов, заполненных напитками, или аналогичных продуктов.
Предпочтительные частные варианты изложены в зависимых пунктах формулы изобретения.
Далее приведено более подробное описание изобретения со ссылками на прилагаемые чертежи, на которых изображены:
фиг.1 - схематический вид спереди транспортера с захватывающим устройством согласно изобретению,
фиг.2 - вид сверху устройства, изображенного на фиг.1,
фиг.3 - захватывающее устройство, изображенное на фиг.1, с местным разрезом, при расположении захватов с первым шагом и
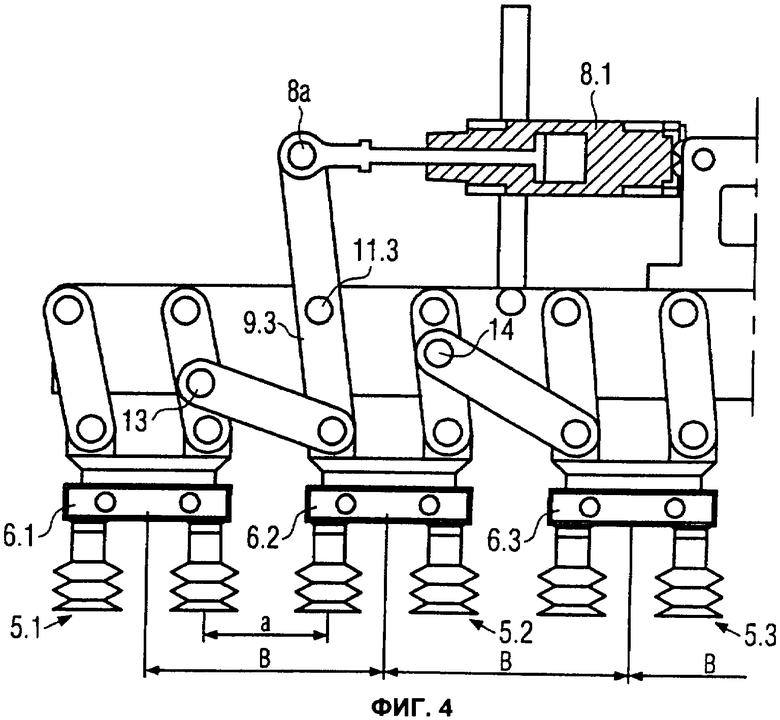
фиг.4 - захватывающее устройство, изображенное на фиг.1, с местным разрезом, при расположении захватов со вторым шагом.
На фиг.1 и 2 предлагаемое захватывающее устройство 1 показано как часть транспортирующего устройства 2. Однако захватывающее устройство 1 может также представлять собой часть технологической машины или аналогичного оборудования.
Транспортирующее устройство 2 предназначено специально для высокоскоростной транспортировки объектов, которые не показаны на чертеже (например, упаковки для пищевых продуктов, в частности, заполненных пластиковых пакетов, в том числе известных устойчивых пакетов для напитков). При этом захватывающее устройство 1 пригодно, например, для съема объектов с транспортирующего устройства 2 и размещения их например, в наружной упаковке.
Транспортирующее устройство 2 содержит большое количество конвейерных линий 3. В данном варианте реализации изобретения изображены шесть конвейерных линий 3.1-3.6, выполненных в форме конвейерных лент, на которых транспортируют объекты, открытые сверху. Конвейерные линии 3 перемещаются в направлении перемещения F.
Захватывающее устройство 1 устанавливают над конвейерными линиями 3 для перемещения, по меньшей мере, в горизонтальном направлении Н (поперечно и/или продольно направлению перемещения F). Таким образом, захватывающее устройство может перемещаться из изображенной позиции над конвейерными линиями 3 в позицию, в которой объекты могут быть размещены за пределами конвейерных линий 3. Захватывающее устройство 1 включает раму 4, на которой установлено, предпочтительно в одной общей плоскости, большое количество захватов 5. Желательно выполнять захватывающее устройство 1 таким образом, чтобы захваты 5 могли перемещаться в вертикальном направлении V, чтобы опускаться на объекты и подниматься над ними или с ними с конвейерных линий 3. Перемещение в направлении двойной стрелки V может осуществлять одинарный захват 5 и/или рама 4.
Захваты 5 в предпочтительном варианте исполнения имеют вид присасывающих головок с пневматическим приводом, применение которых в захватывающих устройствах уже известно.
Захваты 5 объединяются в группы 5.1-5.6, каждая из которых содержит захваты 5, установленные на держателе 6 с предварительно заданным шагом a, b между ними. В показанном примере представлено шесть групп 5.1-5.6 захватов, которые в каждом случае прикреплены к соответствующим держателям 6.1-6.6, при этом количество групп и количество держателей соответствует числу конвейерных линий 3.
Все группы 5.1-5.6 содержат одинаковое количество держателей. В показанном на чертежах варианте реализации изобретения каждая группа 5.1-5.6 содержит два ряда держателей, расположенных друг за другом в направлении F перемещения конвейерных линий 3. В этих двух рядах захваты 5 расположены попарно друг напротив друга, при этом фиксированный шаг а между рядами и фиксированный шаг b (показан только в качестве примера на фиг.2) между держателями в ряду являются одинаковыми для всех захватов 5. Держатели 6.1-6.6 групп 5.1-5.6 установлены практически параллельно конвейерным линиям 3.1-3.6.
В показанном варианте реализации изобретения каждая из групп 5.1-5.6 захватов 5 обслуживает одну из конвейерных линий 3.1-3.6 транспортирующего устройства 2, при этом к каждому держателю 6.1-6.6 прикреплены захваты, обслуживающие соответствующую конвейерную линию 3. Однако количество держателей 6, соответствующих конвейерной линии 3, а также количество захватов в каждой группе и/или их расположение можно изменять и адаптировать к объектам, подлежащим перемещению. В отдельном случае, каждая группа может содержать один-единственный захват.
В показанном на чертежах варианте реализации изобретения для групп 5.1-5.6 или их держателей 6.1-6.6 в направлении, поперечном направлению транспортирования F, установлен шаг А, который согласован с шагом А' конвейерных линий 3 таким образом, чтобы захваты 5 каждой группы 5.1-5.6, опускаясь в направлении стрелки V на конвейерные линии 3, могли беспрепятственно вступать в контакт с объектами, поступающими по соответствующим конвейерным линиям 3.1-3.6.
Предлагаемое захватывающее устройство 1 позволяет изменять расстояние между группами в направлении, поперечном направлению транспортирования F. Изменение расстояния осуществляется благодаря приводу 7, при помощи которого захваты 5 перемещаются относительно рамы 4, так что расстояние между группами 5.1-5.6 уменьшается или увеличивается.
В показанном варианте реализации изобретения расстояние варьируется при помощи привода 7, который по меньшей мере частично механизирован. Привод 7 содержит цилиндры 8, в частности, пневматические цилиндры, а также содержит механический передаточный узел 9, который в предпочтительном варианте имеется на каждом из держателей 6. Посредством механических узлов 9 группы захватов 5.1-5.6 или их держатели 6.1-6.6 можно сводить или разводить в направлении двойной стрелки S относительно рамы 4. Можно также выполнить один из держателей зафиксированным на раме 4, и перемещать остальные держатели, приближая их к зафиксированному держателю или удаляя от него.
В показанном варианте реализации изобретения держатели 6 объединены в группы, которые перемещаются общими приводными средствами (в данном случае пневматическими цилиндрами и передаточными узлами). Таким образом, держатели 6.1-6.3 перемещаются совместно одним или несколькими первыми пневматическими цилиндрами 8.1, а держатели 6.4-6.6 перемещаются совместно одним или несколькими вторыми пневматическими цилиндрами 8.2. Передаточный узел 9 обеспечивает перемещение группы захватов 5.1-5.6 или их держателей 6.1-6.6 во всех случаях на предварительно заданную величину W перемещения, которая может варьироваться для разных групп держателей и которая фактически может быть такой, что как больший шаг А, так и меньший шаг В в каждом случае являются одинаковыми для всех держателей 6 или групп захватов.
В показанном варианте реализации изобретения передаточный узел 9 содержит передаточное звено 10, которое обеспечивает различные траектории W. Передаточный узел 9 выполнен в виде рычажного механизма, который включает по меньшей мере одно звено, предпочтительно два звена на один держатель 6. Для наглядности на фиг.3 и 4 показана только половина захватывающего устройства 1, к которой относятся приведенные далее пояснения. При этом на основании фиг.1 и 2 легко представить, что вторая половина выполнена идентично первой и является ее зеркальным отображением. Каждому держателю 6 соответствует одно звено, предпочтительно два звена 9.1, 9.2, 9.3, 9.4, 9.5 и 9.6 передаточного узла 9. Звенья 9.1-9.6 в каждом случае соединены с соответствующим первым шарниром 11 на раме 4 и вторым шарниром 12 на держателе 6. Пары звеньев 9.1 и 9.2, 9.3 и 9.4, 9.5 и 9.6, связанные с соответствующим держателем 6, расположены параллельно друг другу. Все звенья 9.1-9.6 имеют одинаковую длину. Расстояние между шарнирами 11 или 12 соответствующих держателей 6 является одинаковым для всех держателей 6. Таким образом, каждый из держателей 6 всех групп захватов может поворачиваться вокруг шарниров 11, 12 соответствующих звеньев, перемещаясь, соответственно, в параллельном направлении.
В показанном на чертежах варианте реализации изобретения пневматический цилиндр 8.1 привода 7 соединен с центральным держателем 6.2. Это соединение осуществляют путем удлинения одного из звеньев, а именно звена 9.3, за шарнир 11.3 на раме 4, так что звено 9.3 образует двуплечий рычаг. Пневматический цилиндр 8.1 посредством шарнира 8а присоединен к звену 9.3 и поворачивает его вокруг шарнира 11.3 для непосредственного привода поворота центрального держателя 6.2.
Непосредственно ведомый держатель 6.2 соединен с двумя другими держателями 6.1 и 6.3 для передачи движения. Таким образом, пневматический цилиндр 8.1 может поворачивать все три держателя 6.1, 6.2 и 6.3. Соединение осуществлено посредством соединительных элементов 10.1 и 10.2 передаточного звена 10. Соединительный элемент 10.1 соединяет ведомый держатель 6.2 с одним из соседних держателей, а именно с боковым держателем 6.1, в то время как соединительный элемент 10.2 соединяет ведомый держатель 6.2 с другим соседним держателем 6.3. При этом соединительный элемент 10.1 соединен с шарниром 12.3 держателя 6.2 и со своим собственным шарниром 13, который размещен на присоединенном звене 9.2 соседнего держателя 6.1. Соединительный элемент 10.2 может проворачиваться в шарнире 12.5 другого соседнего держателя 6.3, а для обеспечения поворота соединен со своим собственным шарниром 14, который размещен на соседнем звене 9.4.
Положение шарниров 13 и 14 по отношению к шарнирам 11.2 или 11.4 соответственно перемещаемых звеньев 9.2 и 9.4 определяет величину W перемещения соответствующего присоединенного держателя, когда пневматический цилиндр 8.1 перемещает ведомый держатель. В показанном на чертежах варианте реализации изобретения шарнир 13 соединительного элемента 10.1 на звене 9.2 расположен на расстоянии x от шарнира 11.2 звена 9.2, а шарнир 14 соединительного элемента 10.2 на звене 9.4 расположен на расстоянии y от шарнира 11.4 звена 9.4. Расстояние x превышает расстояние y, поэтому для поворота двух звеньев 9.3 и 9.4 на одинаковый угол шарнир 13 должен проходить больший путь относительно шарнира 11.2, чем шарнир 14 относительно шарнира 11.4. Это означает, что держатель 6.1 перемещается больше, чем держатель 6.2, а держатель 6.3 перемещается меньше, чем держатель 6.2. Для того чтобы шаг В между всеми держателями 6.1, 6.2 и 6.3 после поворота оставался постоянным, необходимо, чтобы при постоянном шаге А величины перемещения держателей 6.1, 6.2 и 6.3 соотносились бы как 5:3:1. Таким образом, если перемещение держателя 6.3 (половина разности между А и В) равно 1, то центральный держатель 6.2 должен перемещаться в три раза дальше, а боковой держатель 6.1 - в 5 раз дальше, когда пневматический цилиндр 8.1 перемещается из правого крайнего положения, показанного на фиг.3, в левое крайнее положение, показанное на фиг.4.
Конечные позиции цилиндров 8 и передаточного узла 9 с передаточным звеном 10 должны быть согласованы таким образом, чтобы держатели 6.1-6.3 переключались между шагом А и шагом В симметрично относительно своей нулевой позиции, определяемой силой тяжести, поэтому держатели 6 при шаге А и шаге В находятся на одинаковом расстоянии по вертикали от конвейерных линий 3. Как показано на фиг.3 и 4, это обеспечивается за счет установления большого первоначального отклонения переменной величины. Различие расстояний по вертикали, возникающее вследствие различной длины пройденного пути W, можно компенсировать за счет разной высоты конструктивных компонентов, например захватов 5. Таким образом, обеспечивают, что все захваты 5 при захвате объектов располагаются в плоскости, которая проходит практически параллельно плоскости транспортировки.
Если, например, с помощью предлагаемого захватывающего устройства 1 требуется снимать с конвейерных линий 3 объекты, которые распределены с большим шагом А, то захватывающее устройство 1 выравнивают так, чтобы его группы захватов 5.1-5.6 проходили параллельно над конвейерными линиями 3.1-3.6. Захватывающее устройство 1 или захваты 5 опускаются на объекты и захватывают их. Затем захваты 5 или захватывающее устройство 1 поднимаются, увлекая за собой объекты с конвейерных линий 3. Далее захватывающее устройство 1 перемещается в горизонтальном направлении Н, преимущественно поперечно направлению транспортирования F, чтобы вывести объекты из зоны транспортирующего устройства 2. Если объекты требуется расположить с меньшим шагом В, приводят в действие привод 7. Цилиндры перемещаются в конечную позицию, показанную на фиг.4, и группы захватов сближаются друг с другом в направлении продольной центральной плоскости захватывающего устройства до тех пор, пока расстояние между группами захватов не уменьшится до величины меньшего шага В, или не будет сведено на нет. При этом в предпочтительном варианте реализации изобретения шаг В устанавливают таким образом, чтобы расстояние между захватами 5, обращенными друг к другу в соседних группах захватов, было равно расстоянию между захватами 5 во всех группах захватов.
Затем объекты могут быть помещены, например, в большую внешнюю упаковку. После этого захватывающее устройство снова перемещается к конвейерным линиям, и группы захватов распределяются с большим шагом А в соответствии с шагом конвейерных линий 3.
В качестве разновидности описанного и показанного на чертежах варианта реализации изобретения может служить захватывающее устройство, которое согласно изобретению выполнено таким образом, чтобы обеспечить возможность изменения расстояния между всеми захватами в направлении, поперечном направлению движения транспортирующего устройства. Это означает, что каждая группа состоит из одного единственного захвата или одного ряда захватов. Захватывающее устройство согласно изобретению может быть адаптировано к выполнению самых разнообразных задач и модифицировано с учетом типа и конструкции захватов. Кроме того, устройство может быть снабжено контроллером, который будет устанавливать величины шага А и В, а также любое количество промежуточных между А и В шагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩАЯСЯ КОРОБКА ДЛЯ УПАКОВКИ ПИЦЦЫ | 2020 |
|
RU2817157C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ТЕКСТУРИРОВАННОЙ КОМПЛЕКСНОЙ НИТИ | 2005 |
|
RU2405868C2 |
| ПРОГРАММИРУЕМОЕ ЛОГИЧЕСКОЕ УСТРОЙСТВО | 2016 |
|
RU2637462C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ОШИБОК | 1998 |
|
RU2127943C1 |
| КОМПЛЕКС КОНТРОЛЯ РЕЖИМОВ ГЕНЕРАЦИИ УЛЬТРАКОРОТКИХ ИМПУЛЬСОВ ЛАЗЕРОВ | 2024 |
|
RU2834174C1 |
| ДЕРЖАТЕЛЬ КАБЕЛЕУКЛАДЧИКА ОЧИСТНОГО КОМБАЙНА | 2017 |
|
RU2668116C1 |
| САМОСКЛАДЫВАЮЩАЯСЯ КОРОБКА С ПОДСТАВКОЙ ДЛЯ УПАКОВЫВАНИЯ ПИЦЦЫ И ИНСТРУМЕНТ ДЛЯ ФОРМИРОВАНИЯ КОРОБКИ | 2015 |
|
RU2653479C1 |
| СТАНОК-КАЧАЛКА | 2007 |
|
RU2417330C2 |
| ЭЛЕКТРИЧЕСКАЯ РОЗЕТКА С ДВУМЯ ГНЕЗДАМИ | 2004 |
|
RU2329577C2 |
| Кольцевой счетчик | 1983 |
|
SU1089764A1 |


Захватывающее устройство (1), которое содержит захваты (5), установленные в первой позиции с заданным шагом (А). Приводное устройство (7) перемещает захваты во вторую позицию, в которой захваты установлены с другим заданным шагом. Приводное устройство содержит передаточное звено (10) для перемещения двух соседних захватов по траектории различной длины, для задания которой соединительные элементы посредством шарниров соединены со звеном другого захвата на расстоянии от первого шарнира звена. Упрощается конструкция устройства. 4 з.п. ф-лы, 4 ил.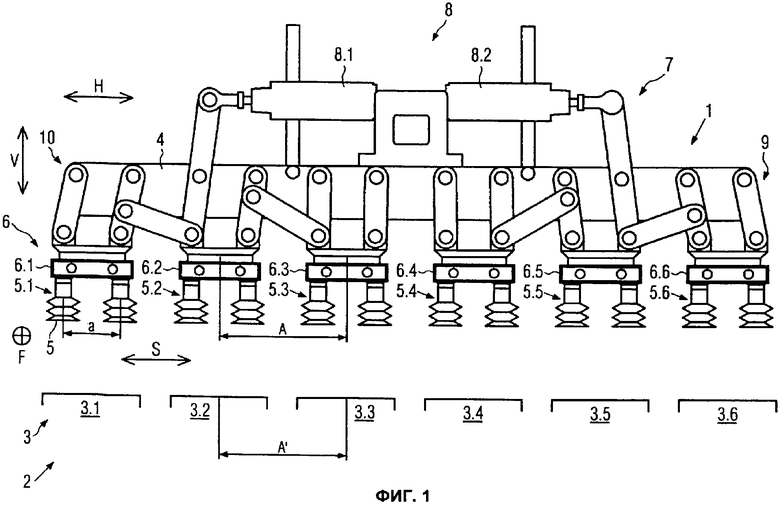
1. Захватывающее устройство (1), содержащее захваты (5), которые расположены в первой позиции с заданным шагом (А) между ними, а также содержащее приводное устройство (7) для перемещения захватов (5) по меньшей мере во вторую позицию, в которой захваты (5) расположены с заданным шагом (В) между ними, причем приводное устройство (7) содержит механический передаточный узел (9), содержащий рычажный механизм, соединенный с захватами (5), и по меньшей мере одно звено (9.1-9.6), на котором подвешены захваты (5.1-5.6), для удержания каждого захвата (5.1-5.6) и осуществления поворота, при этом приводное устройство воздействует на звено (9.3) одного из захватов (5.2), а звено (9.2, 9.5) по меньшей мере одного соседнего захвата (5.1, 5.3) посредством соединительного элемента (10.1, 10.2) соединено с ведущим звеном (9.3), отличающееся тем, что каждое звено (9.1-9.6) имеет первый шарнир (11), размещенный на раме (4), а приводное устройство (7) содержит передаточное звено (10) для перемещения двух соседних захватов (5) по траектории (W) различной длины, для задания которой соединительные элементы (10.1, 10.2) посредством шарниров (13, 14) соединены со звеном (9.2, 9.5) другого захвата (5.1, 5.3) на расстоянии (x, y) от первого шарнира (11) звена (9.1-9.6).
2. Захватывающее устройство (1) по п.1, отличающееся тем, что указанные захваты (5) расположены группами (5.1, 5.2, 5.3, 5.4, 5.5, 5.6) на держателях (6) с фиксированным шагом (а, b) между ними, при этом держатели (6.1, 6.2, 6.3, 6.4, 6.5, 6.6) могут перемещаться приводом (7).
3. Захватывающее устройство (1) по п.2, отличающееся тем, что захваты (5) установлены по меньшей мере в один ряд, и их в этом ряду можно совместно перемещать.
4. Захватывающее устройство (1) по любому из пп.1-3, отличающееся тем, что оно выполнено в форме захватывающей головки, содержащей раму (4), держатели (6), которые установлены с переменным расстоянием между ними на раме (4), на которой во всех случаях с фиксированным шагом (а, b) размещены группы (5.1-5.6) захватов (5), и привод (7) с механическим передаточным устройством (9, 10) по меньшей мере на одном держателе (6) для варьирования шага (А, В) между держателями (6).
5. Захваты вающее устройство (1) по любому из пп.2-4, отличающееся тем, что передаточный узел (9) для каждой из групп захватов (5.1-5.6) содержит по меньшей мере одно звено (9.1-9.6), на котором подвешена соответствующая группа захватов (5.1-5.6) для осуществления поворота, при этом привод воздействует на звено (9.3) одной из групп захватов (5.2), а звено (9.2, 9,5) по меньшей мере одной соседней группы захватов (5.1, 5.3) посредством соединительного элемента (10.1, 10.2) соединяется с ведомым звеном (9.3).
| US 3860280 А, 14.01.1975 | |||
| US 3929234 А, 30.12.1975 | |||
| US 3506140 А, 14.04.1970 | |||
| Устройство для очистки вытяжных вальцов прядильной машины для мокрого прядения химических нитей | 1984 |
|
SU1273407A1 |
| 0 |
|
SU298516A1 | |

