Изобретение относится к антенной технике, в частности к мобильным антенным установкам.
Известна мобильная антенная установка (АУ) станции «Орион» (И.Перетяган. - «НПП «Спец-Радио»: «Быть на шаг впереди конкурентов!». - «Военный парад», - №1(55), 2003, январь-февраль, с.92). Эта мобильная АУ содержит смонтированное на транспортном средстве основание, на котором поворотно закреплена снабженная гидроцилиндрами поворота подъемная мачта с антенной и выносные опоры, устанавливаемые с возможностью контактирования с грунтом. Подъемная мачта включает рычаги с взаимным шарнирным сочленением, образующие верхнюю и нижнюю секции подъемной мачты с возможностью входа верхней секции в нижнюю при складывании подъемной мачты. На верхней секции мачты закреплена опорная платформа для опорно-поворотного устройства антенны.
Вышеупомянутая АУ имеет систему горизонтирования, реализованную с помощью аутригеров. Этот принцип горизонтирования предполагает попарную работу домкратов (аутригеров). Сначала работает пара аутригеров, горизонтирующая машину в плоскости крена (или тонгажа), затем работает пара аутригеров, горизонтирующая машину в плоскости тонгажа (или крена), при этом горизонтирование в плоскости крена может нарушиться. Обычно для достижения заданной точности горизонтирования требуется 2-3 итерации в течение 5-10 мин.
Известна мобильная АУ, содержащая смонтированное на транспортном средстве основание, на котором поворотно закреплена снабженная гидроцилиндрами поворота подъемная мачта с антенной, а также выносные опоры. На верхней секции мачты шарнирно закреплена опорная платформа для опорно-поворотного устройства (ОПУ) антенны, а также промежуточная платформа. При транспортном положении мачта сложена и находится на упорах. На месте развертывания мачта поднимается, затем происходит разворот опорной платформы совместно с установленной на ней промежуточной платформой с антенной и горизонтирование последней относительно одной оси. Затем происходит горизонтирование опорной платформы относительно другой оси (см. патент РФ №2265262, кл. H01Q 1/08, 2004 г.).
Преимущество такой конструкции АУ в том, что горизонтируется непосредственно ОПУ с антенной, а не шасси автомобиля, благодаря чему повышается точность наведения. Но отсюда вытекает и основной недостаток вышеупомянутой конструкции: следящие приводы горизонтирования весят достаточно много, и, поднимая их вместе с антенной, приходится уменьшать полезный вес. Кроме того, мачты кранового типа, занимающие всю базовую длину автомобиля, нельзя отнести к серии сверхкомпактных устройств. Следует отметить, что в процессе раскладывания мачты происходит изменение положения центра масс АУ относительно продольной оси, что может привести к проседанию грунта под опорами и потребовать повторного вывешивания шасси АУ, что в свою очередь увеличивает общее время готовности.
Известна мобильная антенная установка, содержащая транспортируемый контейнер с аппаратурой, на основании которого установлена мачта с антенной. Мачта смонтирована на основании с возможностью ее поворота в вертикальное (рабочее) положение посредством гидравлического привода и снабжена устройствами фиксации в развернутом и транспортном положениях. Контейнер снабжен открывающимися вверх створками, а также выносными поворачивающимися опорами, установленными с возможностью контактирования с грунтом. При транспортном положении установки мачта и антенна находятся в полости контейнера, зафиксированы от самопроизвольных перемещений, контейнер закрыт. При развертывании установки контейнер раскрывают, горизонтируют положение установки откидными домкратами, установленными на поворотных балках, и переводят мачту с антенной посредством привода в вертикальное положение. В развернутом положении антенна имеет возможность вращения вокруг вертикальной оси посредством привода, причем в конструкцию установки введен механизм фиксации мачты в вертикальном (рабочем) положении (см. патент РФ №2115977, кл. H01Q 1/08, 1998 г.). Достоинством этой установки является достаточная компактность и возможность обеспечения защиты антенны от случайных или преднамеренных повреждений. К недостаткам известной установки можно отнести отсутствие возможности осуществлять настройку точного заданного положения антенны, так как положение последней не может регулироваться по высоте и углу наклона к горизонту.
Известна приемопеленгаторная станция AN/PRD-13 (Кондратьев А. Перспективный комплекс РРТР и РЭВ сухопутных войск США «ПРОФЕТ», Зарубежное военное обозрение N 7, 2008, с.37-41). Эта мобильная станция содержит смонтированную на автомобиле HMMWV 6-метровую телескопическую мачту с электромеханическим приводом развертывания с размещенной на ней антенной. Эта конструкция компактна и имеет возможность регулировать высоту подъема. Недостатком является отсутствие системы горизонтирования.
Наиболее близкой по совокупности существенных признаков с заявленным изобретением является мобильная антенная установка (см. патент РФ №2200359, кл. H01Q 1/08, 2001 г.).
Известная мобильная АУ содержит смонтированное на транспортном средстве основание, раму с балансиром и домкратами, а также телескопическую мачту, шарнирно соединенную с основанием. На верхней секции мачты смонтировано приспособление для установки и регулировки положения антенны. В транспортном положении мачта сложена и горизонтально расположена на раме. При развертывании установки на заданной позиции первоначально осуществляют операцию горизонтирования с помощью балок с аутригерами. Далее мачту расфиксируют и приводят в вертикальное положение, после чего мачта снова фиксируется. Затем осуществляют операцию выдвижения секций мачты с помощью тросового привода. Далее происходит поворот антенны в заданное положение через цепной привод.
В результате анализа конструкции известной мобильной установки необходимо отметить, что размещение мачты вдоль шасси автомобиля ведет к нерациональному использованию колесной базы, т.е. вся длина автомобиля получается занятой. Кроме того, следует отметить низкую надежность тросового привода телескопирования, который при складывании использует только вес ступеней мачты и в случае нештатной ситуации (например, подклинивание ступеней мачты в развернутом положении) не позволит произвести процесс складывания мачты. В дополнение следует отметить, что при приведении мачты в вертикальное положение из горизонтального изменяется положение центра масс АУ, что может привести к проседанию грунта под опорами и потребуется повторное горизонтирование.
Задачей настоящего изобретения является создание сверхкомпактного подъемно-мачтового устройства мобильной антенной установки (ПМУМАУ), обеспечивающей возможность ее быстрого развертывания-свертывания и имеющую независимую от шасси систему горизонтирования.
Поставленная задача обеспечивается тем, что в ПМУМАУ, содержащем основание, телескопическую подъемную мачту, смонтированную на основании, опорную платформу с антенной, согласно изобретению подъемная телескопическая мачта выполнена с электромеханическим приводом (на основе передачи типа «винт-гайка»), корпус мачты закреплен в кардановом подвесе, содержащем наружную и внутреннюю рамы, причем наружная рама выполнена с возможностью поворота относительно основания, а внутренняя рама с возможностью поворота относительно наружной рамы, а оси вращения рам карданова подвеса расположены в горизонтальной плоскости, при этом корпус мачты жестко связан с внутренней рамой и расположен продольной осью перпендикулярно к плоскости, образуемой осями вращения карданова подвеса, по осям вращения карданова подвеса установлены приводы горизонтирования платформы, электрически связанные с датчиком горизонта, закрепленным на мачте, опорная платформа содержит неподвижную платформу, жестко связанную с конечной ступенью телескопической мачты, и подвижную платформу, связанную с неподвижной платформой осью вращения с возможностью их взаимного разворота, при этом по оси вращения подвижной платформы установлен привод ее вращения, а антенна размещена на подвижной платформе таким образом, что в рабочем положении антенна расположена над мачтой, а в транспортном положении параллельно корпусу мачты.
При этом варианты конструктивного выполнения ПМУ могут быть следующими:
- приводы, обеспечивающие горизонтирование рам карданова подвеса, шарнирно связаны с рамами карданова подвеса, при этом корпус привода вращения по оси наружной рамы карданова подвеса шарнирно связан с основанием, а выходной подвижный элемент привода шарнирно связан с наружной рамой, корпус привода вращения по оси внутренней рамы карданова подвеса шарнирно связан с наружной рамой, а выходной подвижный элемент этого привода шарнирно связан с внутренней рамой;
- приводы, обеспечивающие горизонтирование рам карданова подвеса, выполнены с жесткой связью с основанием ПМУМАУ, при этом корпус привода вращения по оси наружной (или внутренней) рамы карданова подвеса жестко связан с основанием ПМУМАУ, а выходной подвижный элемент этого привода жестко связан с корпусом привода вращения по оси внутренней (или наружной) рамы, выходной подвижный элемент привода вращения по оси внутренней рамы карданова подвеса связан с корпусом телескопической мачты по скользящей посадке, обеспечивающей перемещение мачты относительно приводов в вертикальной плоскости при ее наклоне;
- корпус привода развертывания платформы шарнирно связан с неподвижной платформой, а выходной подвижный элемент этого привода шарнирно связан с подвижной платформой;
- корпус привода развертывания платформы шарнирно связан с основанием ПМУМАУ, а выходной подвижный элемент этого привода сохраняет связь с осью вращения подвижной платформы, которая жестко связана с этой осью, только в транспортном положении устройства.
Существенными отличительными признаками являются:
- применение подъемной мачты телескопического типа с электромеханическим приводом;
- применение карданова подвеса, состоящего из наружной рамы, имеющей возможность поворота относительно основания, и внутренней рамы, имеющей возможность поворота относительно наружной рамы, при этом оси вращения рам карданова подвеса расположены в горизонтальной плоскости и применена жесткая связь корпуса мачты с внутренней рамой и продольная ось мачты расположена перпендикулярно к плоскости, образуемой осями вращения карданова подвеса;
- применение приводов по осям вращения рам карданова подвеса, обеспечивающих горизонтирование плоскости рам карданова подвеса по сигналу датчика горизонта, расположенного на мачте;
- выполнение опорной платформы из неподвижной платформы, жестко связанной с конечной ступенью телескопической мачты, и подвижной платформы, связанной с неподвижной платформой осью вращения, обеспечивающей их взаимный разворот на 180° («книжкой»), и введение привода по оси вращения подвижной платформы для развертывания платформы; при этом антенна или ОПУ с антенной размещены на подвижной платформе таким образом, что в рабочем положении антенна располагается над мачтой, а в транспортном положении параллельно корпусу мачты;
- выполнение приводов, обеспечивающих горизонтирование рам карданова подвеса шарнирно связанными с рамами карданова подвеса;
- выполнение приводов, обеспечивающих горизонтирование рам карданова подвеса шарнирно связанными с корпусом телескопической мачты;
- применение шарнирной связи корпуса привода развертывания платформы с неподвижной платформой и шарнирной связи выходного подвижного элемента этого привода с подвижной платформой;
- применение жесткой связи корпуса привода развертывания платформы с основанием ПМУМАУ и сохранением связи выходного подвижного элемента этого привода с осью вращения подвижной платформы только в транспортном положении устройства.
Проведенный анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что не обнаружено аналогов, характеризующихся признаками, тождественными всей совокупности существенных признаков заявляемого изобретения. Это позволяет сделать вывод о соответствии заявляемого устройства критерию изобретения «новизна».
Считаем, что сущность изобретения не вытекает из известных технических решений, а следовательно, заявленное изобретение соответствует критерию «изобретательский уровень».
Сущность изобретения поясняется графическими материалами, на которых:
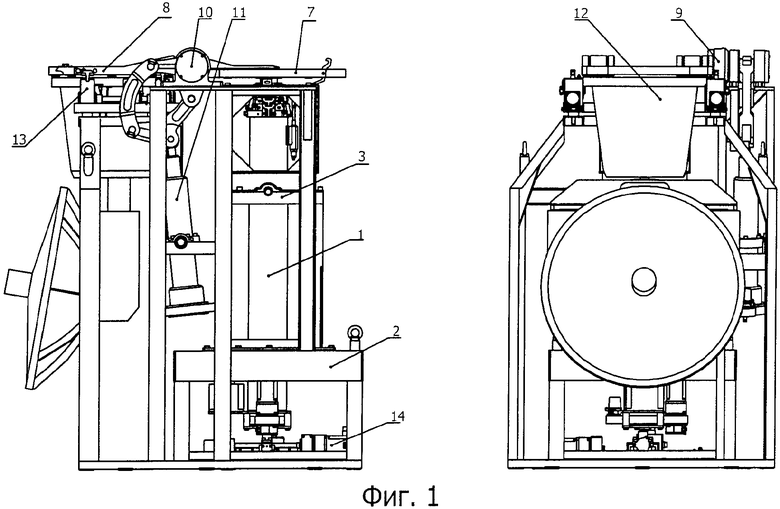
на фиг.1 изображено подъемно-мачтовое устройство, транспортное положение.
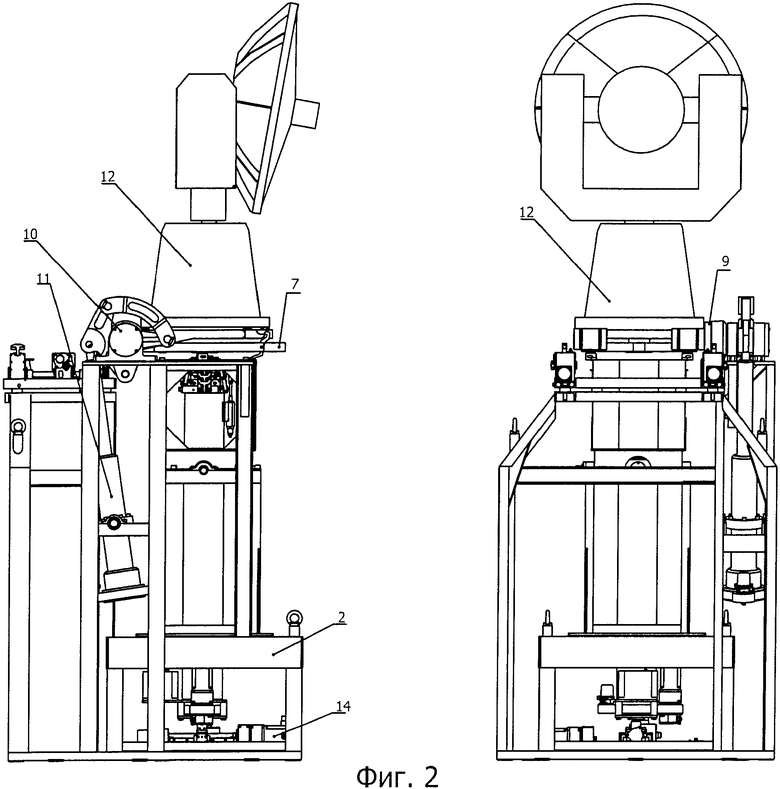
На фиг.2 - подъемно-мачтовое устройство, промежуточное положение.
На фиг.3 - подъемно-мачтовое устройство, рабочее положение.
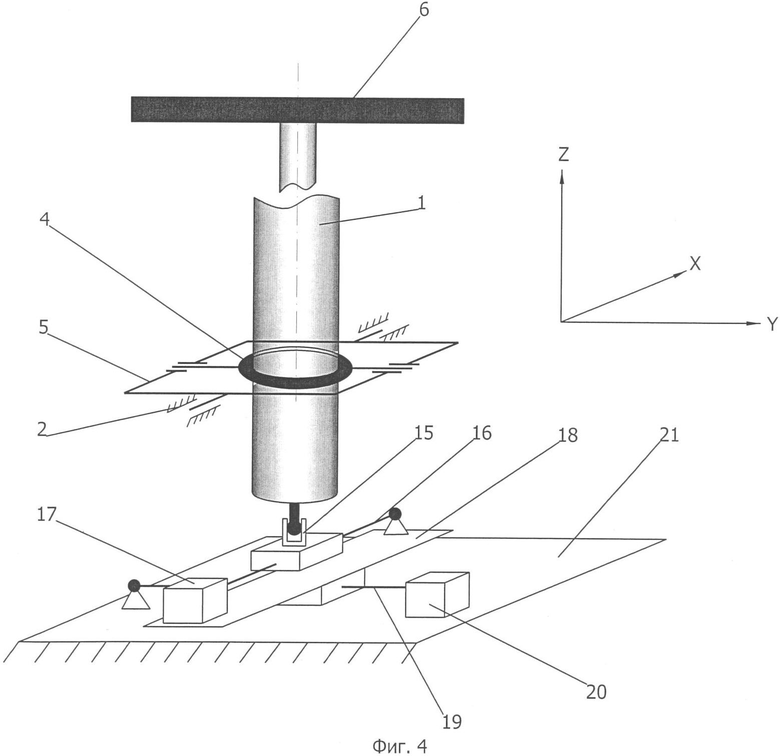
На фиг.4 - кинематическая схема ПМУМАУ с приводом горизонтирования, имеющим жесткую связь с основанием ПМУМАУ.
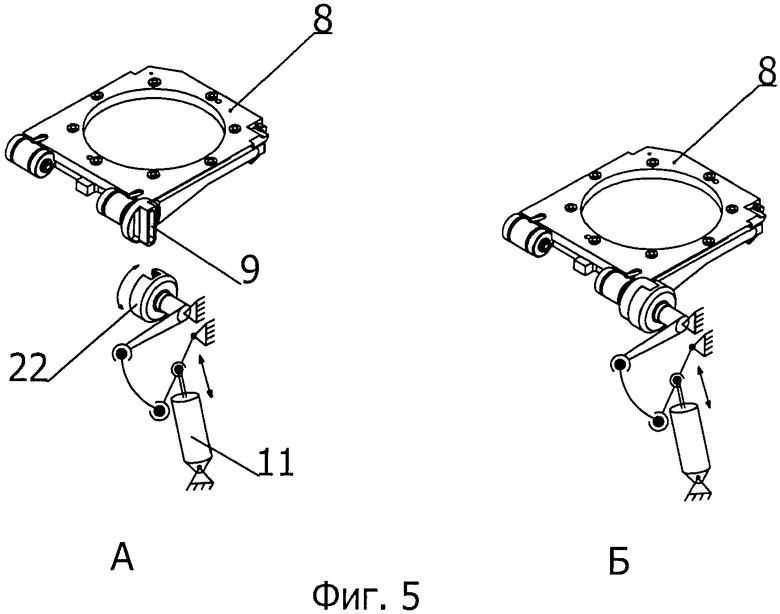
На фиг.5 - кинематическая схема привода разворота платформы с шарнирной связью с корпусом ПМУМАУ и поступательной связью с подвижной платформой в транспортном положении.
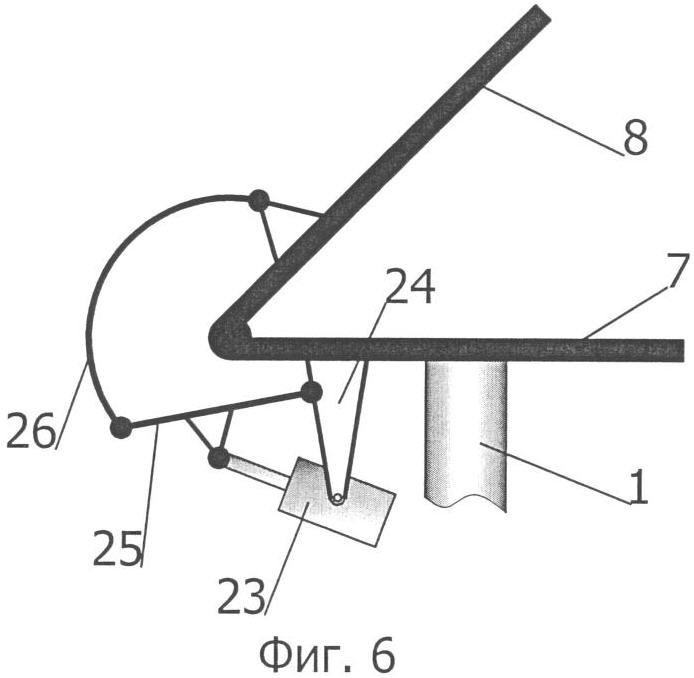
На фиг.6 - кинематическая схема привода разворота платформы с шарнирной связью с обеими платформами.
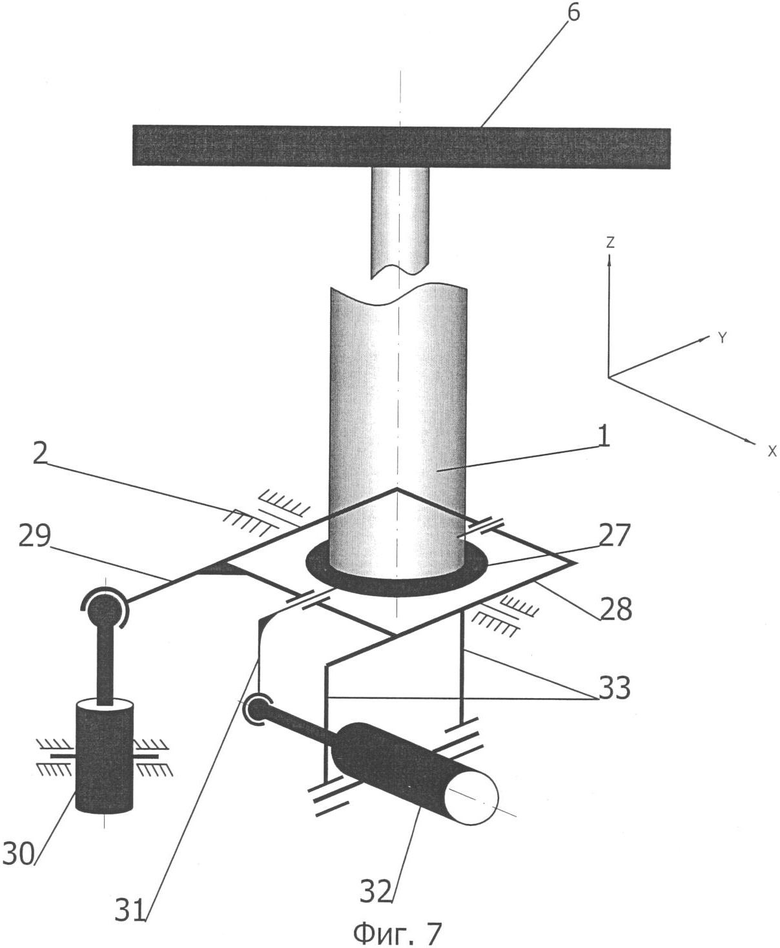
На фиг.7 - кинематическая схема ПМУМАУ с приводом горизонтирования, имеющим шарнирную связь с рамами карданова подвеса.
ПМУМАУ содержит телескопическую мачту 1, смонтированную на основании 2 в кардановом подвесе 3 (фиг.1, 2, 3). Последний выполнен в виде внутренней рамы 4, имеющей возможность поворота в наружной раме 5, которая в свою очередь может поворачиваться в основании 2, при этом оси вращения наружной и внутренней рам взаимно перпендикулярны и расположены в горизонтальной плоскости (фиг.4). На последней ступени телескопической мачты смонтирована опорная платформа 6, состоящая из неподвижной платформы 7 и шарнирно закрепленной поворотной платформы 8. Причем последняя имеет возможность поворачиваться относительно неподвижной платформы. Для варианта конструкции ПМУМАУ по кинематической схеме на фиг.5 подвижная платформа 8 оснащена полумуфтой 9, которая в транспортном положении кинематически связана с размещенным на основании приводом развертывания платформы, состоящим из рычажного привода 10 и электроцилиндра 11. Опорно-поворотное устройство (ОПУ) с антенной 12 жестко закреплено на поворотной платформе 8, которая в транспортном положении развернута относительно неподвижной платформы на 180° и находится на упорах 13, размещенных на основании, при этом ОПУ с антенной расположены вдоль корпуса мачты и в его габаритах. Для варианта конструкции ПМУМАУ с жесткой связью привода горизонтирования платформы (или вертикалирования мачты) с основанием устройства по схеме на фиг.4 нижний конец мачты 1 кинематически связан с приводом 14 вертикалирования мачты, состоящим из выходного звена 15, выполненного в виде втулки и имеющего возможность перемещаться вдоль одной из осей карданова подвеса посредством передачи 16, приводимой в движение движителем 17, расположенным на основании 18, которое в свою очередь имеет возможность перемещаться вдоль другой оси карданова подвеса посредством передачи 19, приводимой в движение движителем 20, расположенным на основании 21, жестко закрепленном на основании 2 ПМУМАУ. Нижний конец мачты 1 и втулка выходного звена 15 привода 14 образуют шарнирное соединение. Рычажный привод 10 оснащен полумуфтой 22, имеющей возможность поворота относительно основания 2.
На фиг.6 представлен вариант размещения привода развертывания платформы, состоящий из электроцилиндра 23, корпус которого шарнирно соединен с кронштейном 24, жестко связанным с платформой 7. Шток электроцилиндра шарнирно связан с рычагом 25, один конец которого шарнирно соединен с кронштейном 24, а другой конец шарнирно соединен с рычагом 26. Второй конец рычага 26 шарнирно соединен с поворотной платформой 8, на которой размещаются ОПУ с антенной.
На фиг.7 представлен вариант привода горизонтирования мачты, в котором мачта 1 жестко закреплена во внутренней раме 27 карданова подвеса, которая в свою очередь шарнирно закреплена в наружной раме 28. Последняя шарнирно закреплена в основании 2 и оснащена жестко закрепленным на ней рычагом 29, который в свою очередь кинематически связан со штоком электроцилиндра 30, корпус которого шарнирно связан с основанием. На оси внутренней рамы 27 жестко закреплен рычаг 31, кинематически связанный со штоком электроцилиндра 32, корпус которого шарнирно связан с рычагами 33 наружной рамы.
Конструктивное выполнение узлов и агрегатов ПМУМАУ, не раскрытое в описании, является известным, не составляет предмета патентной охраны и поэтому в материалах заявки не раскрыто.
ПМУМАУ работает следующим образом.
В транспортировочном (походном) положении телескопическая мачта 1 сложена, а поворотная платформа 8 с размещенным на ней опорно-поворотным устройством 12 развернута относительно неподвижной платформы 7 на угол 180° и находится на транспортировочных упорах 13, ОПУ с антенной расположены вдоль корпуса мачты. При этом полумуфта 9, жестко связанная с поворотной платформой 8, находится в зацеплении с приводом разворота опорной платформы, состоящим из рычажного привода 10 и электроцилиндра 11.
При развертывании ПМУМАУ в рабочее положение электроцилиндр приводит во вращение полумуфту 22 рычажного привода 10, а соответственно, и кинематически связанную с ней через полумуфту 9 поворотную платформу 8 с размещенным на последней опорно-поворотным устройством 12. Поворот подвижной платформы 8 производится на 180° относительно транспортного положения до касания ее неподвижной платформы 7, после чего это рабочее положение платформы (фиг.2) фиксируется (например, электромагнитом или механическим фиксатором). Далее происходит подъем телескопической мачты на промежуточную высоту (высоту горизонтирования), на которой производится операция горизонтирования. Промежуточная высота определяется условием выхода полумуфты 9 поворотной платформы из полумуфты 22 привода развертывания и возможностью фиксирования ступеней телескопической мачты. Затем происходит процесс горизонтирования опорной платформы с размещенным на ней ОПУ. Например, если отсутствует требуемая точность горизонтирования опорной платформы относительно оси внутренней рамы карданова подвеса, вырабатывается сигнал с датчика горизонта, размещенного на корпусе мачты или на опорной платформе (в схеме не указан), который формирует сигнал управления, подаваемый на движитель 17, который приводит во вращение передачу 16 (в варианте изобретения выполнена в виде передачи винт-гайка), вследствие чего происходит перемещение выходного звена, а следовательно, и кинематически связанной с ним мачты вдоль оси X, тем самым обеспечивая поворот мачты относительно оси внутренней рамы карданова подвеса. Этот поворот происходит до появления информации с датчика горизонта о достижении требуемой точности горизонтирования опорной платформы. Аналогичным образом происходит горизонтирование по оси Y. При этом движитель 20 приводит во вращение передачу 19, вследствие чего происходит перемещение внутренней рамы 18 по оси Y. Поскольку мачта в процессе горизонтирования совершает вращательные движения вокруг осей Х и Y, а привод горизонтирования возвратно-поступательные, для предотвращения заклинивания мачты в выходном звене 15 последнее выполнено в виде втулки, а нижний конец мачты в виде шара.
По завершении процесса горизонтирования мачта выдвигается в рабочее положение (фиг.3).
Следует отметить, что в варианте выполнения изобретения привод горизонтирования выполнен на основе самотормозящихся винтовых передач, что освобождает от необходимости применения механизмов фиксации мачты в рабочем положении, а также позволяет быстро выполнить коррекцию горизонтирования в случае необходимости без опускания мачты (например, в случае просадки грунта).
Процесс приведения ПМУМАУ в транспортное положение происходит в обратной последовательности. Мачта автоматически складывается до высоты горизонтирования, затем при помощи привода горизонтирования происходит процесс приведения мачты в положение, при котором выступ полумуфты 9 находится в одной плоскости с пазом полумуфты 22 (это необходимо для совмещения полумуфт). В варианте выполнения изобретения это достигается с помощью датчиков угла, расположенных на осях карданова подвеса (на схеме не показаны). Для этого производят настройку указанных датчиков в транспортном положении устройства на минимальное значение их выходного сигнала. Для опускания мачты ее с помощью приводов горизонтирования приводят в положение, соответствующее минимальному сигналу с датчиков. Затем мачта опускается в транспортное положение, определяемое соосным положением полумуфт 9 и 22, характеризующее транспортное положение устройства, т.е. положением, при котором ось вращения полумуфты 22 совпадает с осью поворота платформы 8. Далее происходит процесс разворота платформы с размещенным на ней ОПУ в транспортное положение при помощи рычажного привода 10, приводимого во вращение электроцилиндром 11.
В конструкции, представленной на фиг.6, поступательное движение штока электроцилиндра преобразуется во вращательное движение платформы 8. Достоинством такого варианта конструкции этого привода в том, что он позволяет производить разворот платформы в любом положении мачты. Такая необходимость может возникнуть, если размеры контейнера, в котором размещена ПМУМАУ, не позволяют произвести разворот платформы в транспортном положении мачты. В этом случае мачта сначала выдвигается за габариты контейнера, затем происходит разворот платформы.
На фиг.2 представлен возможный вариант рабочего положения устройства без подъема мачты.
В конструкции, представленной на фиг.5, при поступательном движении штока электроцилиндра 32 происходит поворот внутренней рамы вокруг оси Y. При поступательном движении штока электроцилиндра 30 происходит поворот наружной рамы вместе с размещенной на ней внутренней рамой и электроцилиндром 32. Такой вариант конструкции привода горизонтирования мачты позволяет получить меньшие габариты по высоте, но при этом мощность приводов повышается относительно варианта конструкции, представленной на фиг.4.
Таким образом, вертикальное положение мачты в транспортном состоянии ПМУМАУ обеспечивают постоянство габаритов устройства и тем самым компактность предлагаемого устройства, что позволяет разместить конструкцию в небольшом транспортируемом контейнере, размещение ОПУ с антенной вдоль корпуса мачты в его вертикальном габарите и размещение ПМУМАУ в контейнере позволяют обеспечить защиту антенны от случайных воздействий, использование карданова подвеса для горизонтирования платформы с антенной позволяет обеспечить высокую точность горизонтирования платформы в условиях отсутствия механизма точного горизонтирования контейнера, при этом масса приводов для горизонтирования не увеличивает массу, поднимаемую мачтой, что обеспечивает достижение цели изобретения.
По предлагаемому техническому решению в ОАО «СКБ ПА» был изготовлен и испытан опытный образец ПМУМАУ в рамках ОКР «Астериск». Испытания опытного образца показали, что данная конструкция ПМУМАУ в полной мере работоспособна, имеет наилучшие среди аналогов массогабаритные характеристики и минимальное время развертывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2010 |
|
RU2419925C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2004 |
|
RU2265262C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |
| МОБИЛЬНОЕ АНТЕННОЕ УСТРОЙСТВО | 2011 |
|
RU2444097C1 |
| МАЧТОВОЕ УСТРОЙСТВО | 2012 |
|
RU2496193C1 |
| Автоматическое антенно-мачтовое устройство с механизмами подъема | 2023 |
|
RU2813629C1 |
| Автоматическое антенно-мачтовое устройство с несимметричной и симметричными антеннами | 2023 |
|
RU2813238C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
Изобретение относится к антенной технике, в частности к мобильным антенным установкам. Техническим результатом является создание компактного устройства, обеспечивающей возможность быстрого развертывания-свертывания антенны с независимой от шасси системой горизонтирования. В устройстве, содержащем основание, телескопическую подъемную мачту, смонтированную на основании, опорную платформу с антенной, согласно изобретению подъемная телескопическая мачта выполнена с электромеханическим приводом. Корпус мачты закреплен в кардановом подвесе, содержащем наружную и внутреннюю рамы, выполненные с возможностью поворота. Корпус мачты жестко связан с внутренней рамой и расположен продольной осью перпендикулярно к плоскости, образуемой осями вращения карданова подвеса. По осям вращения карданова подвеса установлены приводы горизонтирования платформы, электрически связанные с датчиком горизонта, закрепленным на мачте. Опорная платформа содержит неподвижную часть, жестко связанную с конечной ступенью телескопической мачты, и подвижную часть, связанную с неподвижной частью платформы осью вращения с возможностью их взаимного разворота, при этом по оси вращения подвижной части платформы установлен привод ее вращения. Антенна размещена на подвижной части опорной платформы таким образом, что в рабочем положении антенна расположена над мачтой, а в транспортном положении параллельно корпусу мачты. 4 з.п. ф-лы, 7 ил.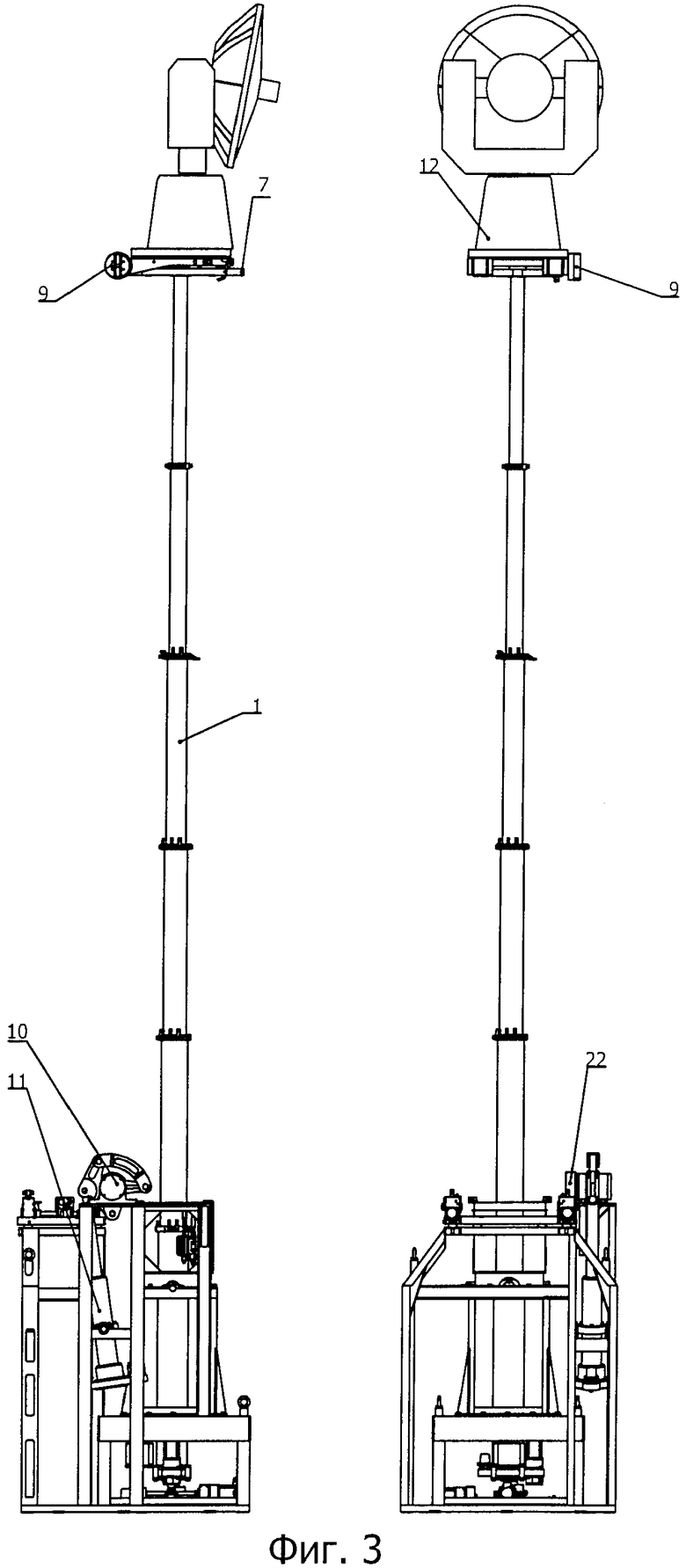
1. Подъемно-мачтовое устройство мобильной антенной установки, содержащее основание, телескопическую подъемную мачту, смонтированную на основании, опорную платформу с антенной, отличающееся тем, что в нем подъемная телескопическая мачта выполнена с электромеханическим приводом на основе передачи типа «винт-гайка», корпус мачты закреплен в кардановом подвесе, содержащем наружную и внутреннюю рамы, причем наружная рама выполнена с возможностью поворота относительно основания, а внутренняя рама с возможностью поворота относительно наружной рамы, а оси вращения рам карданова подвеса расположены в горизонтальной плоскости, при этом корпус мачты жестко связан с внутренней рамой и расположен продольной осью перпендикулярно к плоскости, образуемой осями вращения карданова подвеса, по осям вращения карданова подвеса установлены приводы горизонтирования платформы, электрически связанные с датчиком горизонта, закрепленным на мачте, опорная платформа содержит неподвижную платформу, жестко связанную с конечной ступенью телескопической мачты и подвижную платформу, связанную с неподвижной платформой осью вращения с возможностью их взаимного разворота, при этом по оси вращения подвижной платформы установлен привод ее вращения, а антенна размещена на подвижной платформе таким образом, что в рабочем положении антенна расположена над мачтой, а в транспортном положении - параллельно корпусу мачты.
2. Подъемно-мачтовое устройство мобильной антенной установки по п.1, отличающееся тем, что привода, обеспечивающие горизонтирование рам карданова подвеса шарнирно связаны с рамами карданова подвеса, при этом корпус привода вращения по оси наружной рамы карданова подвеса шарнирно связан с основанием, а выходной подвижный элемент привода шарнирно связан с наружной рамой, корпус привода вращения по оси внутренней рамы карданова подвеса шарнирно связан с наружной рамой, а выходной подвижный элемент этого привода шарнирно связан с внутренней рамой.
3. Подъемно-мачтовое устройство мобильной антенной установки по п.1, отличающееся тем, что привода, обеспечивающие горизонтирование рам карданова подвеса выполнены с жесткой связью с основанием, при этом корпус привода вращения по оси наружной или внутренней рамы карданова подвеса жестко связан с основанием, а выходной подвижный элемент этого привода жестко связан с корпусом привода вращения по оси внутренней или наружной рамы, выходной подвижный элемент привода вращения по оси внутренней рамы карданова подвеса связан с корпусом телескопической мачты по скользящей посадке, обеспечивающей перемещение мачты относительно приводов в вертикальной плоскости при ее наклоне.
4. Подъемно-мачтовое устройство мобильной антенной установки по п.1, или 2, или 3, отличающееся тем, что корпус привода развертывания платформы шарнирно связан с неподвижной платформой, а выходной подвижный элемент этого привода шарнирно связан с подвижной платформой.
5. Подъемно-мачтовое устройство мобильной антенной установки по п.1, или 2, или 3, отличающееся тем, что корпус привода развертывания платформы шарнирно связан с основанием, а выходной подвижный элемент этого привода сохраняет связь с осью вращения подвижной платформы, которая жестко связана с этой осью, только в транспортном положении устройства.
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2001 |
|
RU2200359C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2004 |
|
RU2265262C1 |
| ПОДЪЕМНИК | 2000 |
|
RU2196104C2 |
| DE 4329715 C1, 23.02.1995 | |||
| US 5426444 A, 20.06.1995 | |||
| РАСПЫЛИТЕЛЬНАЯ СУШИЛКА ДЛЯ РАСТВОРОВ И СУСПЕНЗИЙ | 1991 |
|
RU2015467C1 |

