Область техники, к которой относится изобретение
Это изобретение относится к способам и устройствам для приема радиосигналов, а более конкретно к таким способам и устройствам, которые включают в себя антенную систему с коммутационным разнесением.
Предшествующий уровень техники
Система HD RadioTM от iBiquity Digital Corporation предназначена для предоставления звука на цифровом уровне качества, превосходящем существующие аналоговые форматы радиовещания. Система HD RadioTM позволяет провести постепенную эволюцию от современных систем радиовещания с применением амплитудной модуляции (АМ-радиовещания) и радиовещания с применением частотной модуляции (ЧМ-радиовещания) к полностью цифровой системе стандарта внутриполосного поканального радиовещания (ВПР (IBOC)). Эта система предоставляет услуги передачи аудиоинформации и данных мобильным, переносным и стационарным приемникам от наземных передатчиков в существующих радиодиапазонах средних частот (MF; СЧ) и очень высоких частот (VHF; ОВЧ). Радиовещательные компании могут продолжать АМ- и ЧМ-радиовещание одновременно с новым, более высоким качеством и посредством более устойчивых цифровых сигналов, что обеспечивает этим компаниям и их слушателям возможность перейти от аналогового радиовещания к цифровому, поддерживая соответствующие им текущие присвоения частот.
Трансляция методом HD RadioTM в соответствии со стандартом ВПР осуществляется с помощью составного сигнала, который включает в себя множество поднесущих, полученных методом мультиплексирования с ортогональным разделением частот (МОРЧ (OFDM)), и опорных поднесущих в пределах радиовещательного канала. Для цифровой части ЧМ-сигнала стандарта ВПР в приемниках HD RadioTM стандарта ВПР используется когерентная демодуляция. Многочисленные функции, выполняемые опорными поднесущими для осуществления сбора, отслеживания и оценки информации о состоянии канала (ИоСК (CSI)) и когерентной работы, описаны в патенте США № 6549544. Система, описанная в патенте США № 6549544, предназначена для работы в полосе частот (88-108 МГц), отведенной для ЧМ-радиовещания, с замиранием по ширине полосы для согласования с приемниками, используемыми в транспортных средствах, быстро движущихся по автострадам. Различные параметры когерентного слежения оценивают с помощью фильтров, ширины полос которых приближаются к максимальной ожидаемой ширине полосы (приблизительно 13 Гц) доплеровских частот. При стационарной антенне релевантные статистики слежения за входным сигналом для алгоритмов слежения предполагаются изменяющимися по частоте, не превышающей ширину полосы доплеровских частот.
Приемники HD RadioTM стандарта ВПР можно использовать в сочетании с антенной системой с коммутационным разнесением. Антенная система с коммутационным разнесением включает в себя несколько (например, от 2-х до 4-х) антенных элементов, которые обычно заключены внутри стекла переднего или заднего окон транспортного средства. Эти элементы соединены с модулем переключения разнесения, который динамически выбирает один элемент или сочетание элементов для выдачи радиочастотного (РЧ) сигнала антенны в приемник. Модуль переключения разнесения также оперативно контролирует сигнал из приемника, чтобы определить, когда нужна коммутация. Типичный алгоритм «коммутации вслепую» устанавливает порог коммутации на основании среднего уровня сигнала промежуточной частоты (ПЧ) из приемника. Когда сигнал ПЧ падает ниже этого порога, коммутатор вслепую выбирает альтернативный элемент, от которого ожидается выдача лучшего сигнала. Если новый сигнал превышает порог, то коммутатор поддерживает выбор нового элемента. В противном случае модуль коммутации разнесения выбирает альтернативный элемент по истечении минимального количества времени задержки срабатывания. Этот процесс продолжается, и при этом модуль коммутации разнесения непрерывно обновляет свой порог (свои пороги). Пример такой антенной системы с коммутируемым разнесением представлен в патенте США № 6633258 В2 (H. Lindenmeier и др.) “Diversity System for Receiving Digital Terrestrial and/or Satellite Radio Signals for Motor Vehicles” («Система для приема с разнесением радиосигналов, передаваемых из наземных станций или спутников, для автомобилей»), выданном 14 октября 2003 г.
Теоретическое обоснование работы алгоритма коммутации разнесения базируется на разных мгновенных характеристиках замирания различных антенных элементов. Замирание при многолучевом распространении приводит к увеличению многочисленных лучей (многолучевых распространений) сигнала, прибывающего на принимающий антенный элемент в разные моменты времени. Например, длина волны при 100 МГц составляет приблизительно 10 футов. Если два распространения сигнала прибывают в момент времени, отличающийся от соответствующего по одной длине волны, т.е. 10 наносекунд (разность хода 10 футов), то эти сигналы будут складываться в фазе. Точно так же, если два луча прибывают на антенный элемент с временной разницей, соответствующей полудлине волны, то эти сигналы, складывающиеся в противофазе, будут взаимно уничтожаться. Это сложение или взаимное уничтожение является динамическим в движущемся транспортном средстве, где ширина полосы доплеровских частот приближенно определяется выражением BW=fc·s/c (где fc - частота несущей, s - скорость транспортного средства, c - скорость света). Ширина полосы доплеровских частот составляет приблизительно 10 Гц при скоростях, типичных для автострад. Следовательно, вектор сигнала (комплексная версия модуля и фазы) одного антенного элемента может изменяться с частотой примерно 10 Гц в этом примере. Тогда когерентное слежение за опорным сигналом и состоянием канала должно быть согласовано с шириной полосы 10 Гц, чтобы поддерживать когерентное слежение за сигналом.
Типичные антенные элементы в транспортном средстве могут подвергаться воздействию некоторых мгновенных условий замирания (в зависимости от промежутка между элементами и направлений многолучевых распространений). Например, один элемент может находиться на нуле замирания, а другой элемент - на максимуме. В транспортном средстве с несколькими такими элементами возникнет вероятность, что некоторый альтернативный элемент будет принимать существенно больший сигнал, когда заданный элемент испытывает замирание (взаимное уничтожение сигналов). Типичные элементы в многоэлементной антенной ЧМ-системе с разнесением будут иметь мгновенные условия замирания, которые можно было бы сделать до некоторой степени коррелированными, но их оставляют достаточно не коррелированными, чтобы можно было достичь желаемого выигрыша от разнесения с целью улучшения рабочих характеристик.
Когерентный цифровой модем в приемнике HD RadioTM стандарта IBOC предназначен для отслеживания замирания сигналов при скоростях транспортных средств, на которых ширина полосы доплеровских частот меньше 13 Гц. Использование антенн с коммутируемым разнесением в окнах транспортных средств вносит быстрые переходные процессы в когерентное слежение за цифровым сигналом, что ухудшает рабочие характеристики цифрового радиовещания. За переходными процессами, обусловленными динамической коммутацией антенн, невозможно уследить с помощью упомянутого ранее разработанного модема, что приводит к уменьшенной зоне обслуживания при цифровом радиовещании.
В этом изобретении предложен способ когерентного слежения, который обеспечивает согласование переходных процессов коммутации в антенной системе с коммутируемым разнесением. Он также обеспечивает улучшения алгоритмов когерентного слежения, которые используются автономно в антенной системе с коммутационным разнесением вслепую. Эти же алгоритмы могут также нивелировать ухудшение рабочих характеристик из-за импульсного шума или негауссова шума, например, от соседнего аналогового источника ЧМ-помех. Кроме того, улучшаются рабочие характеристики приемников, предусматривающих быструю автоматическую регулировку усиления (АРУ).
Краткое изложение сущности изобретения
Предложен способ когерентного слежения за радиосигналом, включающим в себя множество опорных поднесущих, подвергнутых цифровой модуляции. Способ включает в себя этапы, на которых принимают символы, передаваемые на опорных поднесущих, объединяют символы опорных поднесущих с сопряженной величиной известной опорной последовательности для получения множества выборок, осуществляют медианную фильтрацию выборок для получения отфильтрованных выборок и сглаживают выборки для каждой из опорных поднесущих по множеству опорных поднесущих для получения когерентной оценки опорного сигнала для каждой из поднесущих.
В еще одном аспекте в изобретении описан приемник для когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции. Приемник содержит вход для приема радиосигнала и процессор для когерентного слежения за радиосигналом, включающим в себя множество опорных поднесущих, подвергнутых цифровой модуляции, путем приема символов, передаваемых на опорных поднесущих, объединения символов опорных поднесущих с сопряженной величиной известной опорной последовательности для получения множества выборок, осуществления медианной фильтрации выборок для получения отфильтрованных выборок и сглаживания выборок для каждой из опорных поднесущих по множеству опорных поднесущих для получения когерентной оценки опорного сигнала для каждой из поднесущих.
В изобретении также описан способ когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции, включающий в себя этапы, на которых демодулируют опорную несущую для получения комплексных когерентных опорных коэффициентов усиления, обнаруживают переходный процесс, который влияет на комплексные когерентные опорные коэффициенты усиления, и регулируют комплексные когерентные опорные коэффициенты усиления в окрестности переходного процесса для получения отрегулированных комплексных опорных коэффициентов усиления. Переходный процесс может быть вызван коммутацией между антенными элементами или импульсным шумом.
В изобретении также описан приемник для когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции. Приемник содержит вход для приема радиосигнала и процессор для демодуляции опорной несущей для получения комплексных когерентных опорных коэффициентов усиления, для обнаружения переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, и для регулирования комплексных когерентных опорных коэффициентов усиления в окрестности переходного процесса для получения отрегулированных когерентных опорных коэффициентов усиления.
В еще одном аспекте в изобретении предложен способ оценки дисперсии шума символов в радиосигнале, когда шум может включать в себя выборки импульсообразного шума среди выборок гауссообразного шума, при этом способ включает в себя этапы, на которых суммируют входные выборки и когерентные опорные выборки для получения выборок ошибок, вычисляют квадраты выборок ошибок, разделяют возведенные в квадрат выборки гауссообразного шума и возведенные в квадрат выборки импульсообразного шума и осуществляют нелинейную фильтрацию квадратов выборок ошибок для получения оценки дисперсии шума, представляющей собой сумму долговременной усредненной дисперсии гауссообразного шума и кратковременной дисперсии импульсного шума.
Краткое описание чертежей
На фиг.1 приведено схематическое представление спектра гибридного сигнала, к которому может быть применено это изобретение.
На фиг.2 приведено схематическое представление спектра расширенного гибридного сигнала, к которому может быть применено это изобретение.
На фиг.3 приведено схематическое представление спектра полностью цифрового сигнала, к которому может быть применено это изобретение.
На фиг.4 приведено схематическое представление первого типа упорядочения частотных сегментов.
На фиг.5 приведено схематическое представление второго типа упорядочения частотных сегментов.
На фиг.6 приведено схематическое представление спектрального отображения опорных поднесущих нижней боковой полосы.
На фиг.7 приведено схематическое представление спектрального отображения опорных поднесущих верхней боковой полосы.
На фиг.8 представлена блок-схема модуля обработки управления системой.
На фиг.9 приведено схематическое представление последовательности данных управления системой первичных опорных поднесущих.
На фиг.10 представлена блок-схема дифференциального кодера.
На фиг.11 представлена высокоуровневая блок-схема функционального модуля когерентного опорного сигнала и CSI (ИоСК).
На фиг.12 представлена подробная высокоуровневая блок-схема функционального модуля когерентного опорного сигнала и ИоСК.
На фиг.13 приведено схематическое представление удаления данных из опорных поднесущих верхней первичной боковой полосы.
На фиг.14 представлена блок-схема оценки опорных поднесущих первичных боковых полос.
На фиг.15 представлена блок-схема оценки опорных поднесущих вторичных боковых полос.
На фиг.16 представлена блок-схема оценки дисперсии шума первичных боковых полос.
На фиг.17 представлена блок-схема оценки дисперсии шума вторичных боковых полос.
На фиг.18 представлена блок-схема взвешивания по ИоСК опорных поднесущих.
На фиг.19 представлена блок-схема генерирования весов синхронизации.
На фиг.20 приведено схематическое представление иллюстрации интерполяции опорных поднесущих для первичных боковых полос.
На фиг.21 представлена блок-схема интерполяции опорных поднесущих.
На фиг.22 представлена функциональная схема характерной антенной системы с коммутируемым разнесением.
На фиг.23 представлен график действительной и мнимой составляющих сигнала замирания (без шума) в случае коммутации через каждые 100 символов.
На фиг.24 представлен график действительной и мнимой составляющих отфильтрованного когерентного опорного сигнала замирания в окрестности переходного процесса на символе под номером 200 при отношении «сигнал - шум» (ОСШ), составляющем 10 дБ.
На фиг.25 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 20 дБ).
На фиг.26 представлена блок-схема предварительной когерентной оценки опорного сигнала и шума.
На фиг.27 представлен график в случае 11-отводного фильтра с конечной импульсной характеристикой (КИХ-фильтра) для когерентной оценки опорного сигнала одиночной опорной поднесущей.
На фиг.28 представлен график в случае использования частотного фильтра (для получения опорных поднесущих).
На фиг.29 представлен график влияний типа фильтра на уменьшение ошибки оценки для когерентного опорного сигнала.
На фиг.30 представлен график сравнения характеристик 11-отводного FIR (КИХ)-фильтра и медианной фильтрации когерентного опорного сигнала.
На фиг.31 представлена блок-схема оценки опорного сигнала и шума согласно настоящему изобретению.
На фиг.32 представлен график импульсной характеристики фильтра с бесконечной импульсной характеристикой (БИХ-фильтра).
На фиг.33 представлен график реакции БИХ-фильтра на скачок.
На фиг.34 представлен график уменьшения ошибки в оценке шума как функции параметра «а» БИХ-фильтра.
На фиг.35 представлен график, иллюстрирующий влияния избыточного значения G∗ln(2) коэффициента усиления на вероятность выбора избыточного пути и на увеличенную среднюю оценочную дисперсию шума.
На фиг.36 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) с исходным 11-отводным КИХ-фильтром и исходной БИХ оценкой шума с а=1/16.
На фиг.37 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) с исходным 11-отводным КИХ-фильтром и БИХ оценкой шума с изменением, согласно которому а=1/8.
На фиг.38 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) с исходным 11-отводным КИХ-фильтром, когда накладывается изменение дисперсии шума.
На фиг.39 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) с 5-отводным медианным фильтром и БИХ оценкой шума с изменением, согласно которому а=1/8.
На фиг.40 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) с 5-отводным медианным фильтром, когда накладывается изменение дисперсии шума.
На фиг.41 и 42 представлены графики частоты появления ошибок в блоках.
На фиг.43 представлена блок-схема приемника, который может обрабатывать сигналы в соответствии с изобретением.
На фиг.44 представлена блок-схема, иллюстрирующая метод оценки состояния канала, используемый в приемнике согласно фиг.43.
На фиг.45 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума.
На фиг.46 представлен еще один график, иллюстрирующий влияния переходных процессов коммутации на оценки шума.
На фиг.47 представлена функциональная блок-схема, иллюстрирующая генерирование когерентных опорных сигналов канала.
На фиг.48 представлен график, иллюстрирующий результаты алгоритма обнаружения переходных процессов.
На фиг.49 представлен еще один график, иллюстрирующий результаты алгоритма обнаружения переходных процессов.
На фиг.50 представлена функциональная блок-схема, иллюстрирующая коррекцию коэффициентов усиления когерентного канала в окрестности перехода.
На фиг.51 представлена блок-схема, иллюстрирующая модификацию оценки дисперсии шума.
На фиг.52 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума.
Подробное описание изобретения
На фиг.1 приведено схематическое представление спектра гибридного ЧМ-сигнала 50 стандарта IBOC, к которому может быть применено это изобретение. Этот сигнал включает в себя аналоговый модулированный сигнал 52, находящийся в центре радиовещательного канала 54, первое множество равноотстоящих друг от друга поднесущих 56, подвергнутых мультиплексированию с ортогональным разделением частот, в верхней боковой полосе 58, и второе множество равноотстоящих друг от друга поднесущих 60, подвергнутых мультиплексированию с ортогональным разделением частот (МОРЧ), в нижней боковой полосе 62. Поднесущие, подвергнутые цифровой модуляции, транслируются на меньшем уровне мощности, чем аналоговая модулированная несущая, для согласования с требуемыми канальными масками сигналов. Поднесущие, подвергнутые цифровой модуляции, разделены на сегменты, а различные поднесущие обозначены как опорные поднесущие. Частотный сегмент - это группа из 19-ти поднесущих, подвергнутых МОРЧ (МОРЧ-поднесущих) и содержащих 18 поднесущих, являющихся поднесущими данных, и одну опорную поднесущую.
Гибридный сигнал включает в себя аналоговый частотно-модулированный (ЧМ) сигнал и первичные основные поднесущие, подвергнутые цифровой модуляции. Цифровой сигнал передается в первичных основных (ПеО) боковых полосах по обе стороны от аналогового ЧМ-сигнала в гибридном сигнале. Уровень мощности каждой боковой полосы заметно ниже полной мощности аналогового ЧМ-сигнала. Аналоговый сигнал может быть монофоническим или стереофоническим и может включать в себя каналы, соответствующие регламенту санкционирования дополнительной связи (СДС) (Subsidiary Communications Authorization (SCA) - Регламент Федеральной комиссии связи (США) на ЧМ-вещание в системах озвучивания и звукоусиления).
Поднесущие находятся в равноотстоящих друг от друга местах частотного спектра. Места нахождения поднесущих имеют номера от -546 до +546. В сигнале, показанном на фиг.1, поднесущие находятся в местах под номерами от +356 до +546 и от -356 до -546. Этот сигнал обычно будет использоваться в начальной переходной фазе перед преобразованием в полностью цифровой сигнал.
Каждая первичная основная боковая полоса состоит из десяти частотных сегментов, которые распределены среди поднесущих под номерами от 356 до 545 или от -356 до -545. Поднесущие 546 и -546, также включенные в первичные основные боковые полосы, являются дополнительными опорными поднесущими. Амплитуду каждой поднесущей можно масштабировать с помощью масштабного коэффициента амплитуды.
В гибридном сигнале цифровой сигнал передается в первичных основных (ПеО) боковых полосах с любой стороны от аналогового ЧМ-сигнала. Уровень мощности каждой боковой полосы заметно ниже полной мощности аналогового ЧМ-сигнала. Аналоговый сигнал может быть монофоническим или стереофоническим и может включать в себя каналы, соответствующие регламенту СДС.
На фиг.2 приведено схематическое представление спектра расширенного гибридного сигнала, к которому может быть применено это изобретение. В расширенном гибридном сигнале полоса пропускания боковых полос гибридного сигнала может быть расширена к аналоговому ЧМ-сигналу, чтобы увеличить цифровую емкость. Этот дополнительный спектр, присваиваемый внутреннему краю каждой первичной основной боковой полосы, называется первичной расширенной (ПРа) боковой полосой.
Расширенный гибридный сигнал создают путем добавления первичных расширенных боковых полос к первичным основным боковым полосам, присутствующим в гибридном сигнале, как показано на фиг.2. В зависимости от режима обслуживания по внутреннему краю каждой первичной основной боковой полосы можно добавлять один, два или четыре частотных сегмента.
На фиг.2 приведено схематическое представление расширенного гибридного ЧМ-сигнала 70 стандарта ВПР. Этот расширенный гибридный сигнал создан путем добавления первичных расширенных боковых полос 72, 74 к первичным основным боковым полосам, присутствующим в гибридном сигнале, как показано на фиг.2. В зависимости от режима обслуживания по внутреннему краю каждой первичной основной боковой полосы можно добавлять один, два или четыре частотных сегмента.
Гибридный сигнал включает в себя аналоговый частотно-модулированный (ЧМ) сигнал и первичные основные поднесущие, подвергнутые цифровой модуляции (поднесущие под номерами от +356 до +546 и от -356 до -546) и несколько первичных расширенных поднесущих (поднесущие под номерами от +280 до +355 и от -280 до -355) или все первичные расширенные поднесущие. Этот сигнал обычно будет использоваться во время начальной переходной фазы, предшествующей преобразованию в полностью цифровой сигнал.
Каждая первичная основная боковая полоса включает в себя десять частотных сегментов и дополнительную опорную поднесущую, охватывающие поднесущие под номерами от 356 до 546 или от -356 до -546. Верхние первичные расширенные боковые полосы включают в себя поднесущие под номерами от 337 до 355 (один частотный сегмент), от 318 до 355 (два частотных сегмента) или от 280 до 355 (четыре частотных сегмента). Нижние первичные расширенные боковые полосы включают в себя поднесущие под номерами от -337 до -355 (один частотный сегмент), от -318 до -355 (два частотных сегмента) или от -280 до -355 (четыре частотных сегмента). Амплитуду каждой поднесущей можно масштабировать с помощью масштабного коэффициента амплитуды.
На фиг.3 приведено схематическое представление спектра полностью цифрового сигнала, к которому может быть применено это изобретение. На фиг.3 приведено схематическое представление полностью цифрового ЧМ-сигнала 80 стандарта ВПР. Этот полностью цифровой сигнал создан путем запрета аналогового сигнала, полного расширения ширины полосы первичных цифровых боковых полос 82, 84 и добавления вторичных боковых полос 86, 88 меньшей мощности в спектр, освобожденный аналоговым сигналом. Полностью цифровой сигнал в иллюстрируемом варианте осуществления включает в себя поднесущие, подвергнутые цифровой модуляции, в местах нахождения поднесущих по номерами от -546 до +546, без аналогового ЧМ-сигнала.
В дополнение к десяти основным частотным сегментам все четыре расширенных частотных сегмента присутствуют в каждой основной боковой полосе полностью цифрового сигнала. Каждая вторичная боковая полоса также имеет десять вторичных основных (ВтО) и четыре вторичных расширенных (ВРа) частотных сегмента. Однако в отличие от первичных боковых полос вторичные основные частотные сегменты отображаются ближе к центру канала, а расширенные частотные сегменты - дальше от этого центра.
Каждая вторичная боковая полоса также поддерживает малую вторичную защищенную (ВтЗ) область 90, 92, включающую в себя 12 МОРЧ-поднесущих и опорных поднесущих 279 и -279. Эти боковые полосы называются «защищенными», потому что они находятся в зоне спектра, вероятность воздействия аналоговых или цифровых помех в которой является наименьшей. Дополнительная опорная поднесущая находится в центре канала (0). Упорядочение частотных сегментов ВтЗ области не применяется, потому что ВтЗ область не содержит частотных сегментов.
Каждая вторичная основная боковая полоса содержит поднесущие под номерами от 1 до 190 или от -1 до -190. Верхняя вторичная боковая полоса включает в себя поднесущие под номерами от 191 до 266, а верхняя вторичная защищенная боковая полоса включает в себя поднесущие под номерами от 267 до 278 и опорную поднесущую под номером 279. Нижняя вторичная боковая полоса включает в себя поднесущие под номерами от -191 до -266, а нижняя вторичная защищенная боковая полоса включает в себя поднесущие под номерами от -267 до -278 и дополнительную опорную поднесущую под номером -279. Общая частотная протяженность полностью цифрового спектра составляет 396,803 Гц. Амплитуду каждой поднесущей можно масштабировать с помощью масштабного коэффициента амплитуды. Масштабные коэффициенты амплитуды вторичных боковых полос может выбирать пользователь. Для применения к вторичным боковым полосам можно выбрать любой из четырех коэффициентов.
Все три рассмотренные типа сигналов соответствуют выделенной в настоящее время маске спектральных излучений. Цифровой сигнал модулируют с помощью мультиплексирования с ортогональным разделением частот (МОРЧ (OFDM)). МОРЧ представляет собой процедуру параллельной модуляции, в которой поток данных модулирует большое количество ортогональных поднесущих, которые передаются одновременно. МОРЧ обладает гибкостью, легко обеспечивая отображение логических каналов на разные группы поднесущих.
МОРЧ-поднесущие собирают в частотные сегменты. На фиг.4 приведено схематическое представление первого типа упорядочения частотных сегментов. На фиг.5 приведено схематическое представление второго типа упорядочения частотных сегментов. Каждый частотный сегмент состоит из восемнадцати поднесущих данных и одной опорной поднесущей, как показано на фиг.4 (упорядочение А) и фиг.5 (упорядочение В). Положение опорной поднесущей (упорядочение А или упорядочение В) изменяется с изменением места нахождения частотного сегмента в пределах спектра.
Обработка сигналов осуществляется на уровнях протокола в передатчике цифровой радиовещательной системы для передачи аудиоинформации. Управляющие и информационные сигналы пропускаются через различные уровни стека протоколов для генерирования сигнала стандарта ВПР на радиовещающей стороне. Приемники обрабатывают этот сигнал на соответствующих уровнях протоколов.
Основная программная служба (Main Program Service) сохраняет существующие форматы программирования аналоговых радиосигналов как при аналоговой, так и при цифровой передаче. Кроме того, основная программная служба может предусматривать наличие цифровых данных, которые непосредственно коррелируются с программированием аудиоинформации.
Между равноправными уровнями (например, от уровня n на передающей стороне к уровню n на принимающей стороне) происходит обмен протокольным блоком данных (ПБД (PDU)). Фундаментальная цель любого уровня n стека протоколов заключается в доставке протокольных блоков данных, выдаваемых уровнем n+1 передатчика, на равноправный уровень n+1 принимающей системы. Полезная нагрузка ПБД уровня n+1 состоит из управляющей информации протокола (УИП (PCI)) уровня n+1 и ПБД верхнего уровня (уровня n+2).
Чтобы лучше понять эту идею, рассмотрим протекание информации от уровня n+1 к уровню n на передающей стороне. Протокольные блоки данных уровня n+1 должны быть упакованы так, как указано службой уровня n. Этот пакет называют служебным блоком данных или СБД (SDU). СБД уровня n включает в себя ПБД уровня n+1 и управляющую информацию СБД (УИСБД). Уровень n+1 создает СБД уровня n и посылает этот блок в уровень n через точку доступа к службе уровня n.
Когда уровень n получает СБД, он берет ПБД уровня n+1 и свою собственную управляющую информацию протокола (УИП), которая может включать в себя информацию, принимаемую в УИСБД, и создает ПБД уровня n. Затем ПБД уровня n посылается в равноправный уровень в принимающей системе, где процесс проходит, по существу, в обратном порядке, когда информация идет вверх по уровням протоколов. Следовательно, каждый уровень имеет свой равноправный ПБД и пересылает остальную информацию на следующий уровень в форме СБД.
Уровень L1 представляет собой физический уровень, в котором сигналы подготавливаются для передачи через антенну. Уровень L2 связан с уровнем L1. Для каждого частотного сегмента, поднесущие d1-d18 данных транспортируют протокольные блоки данных уровня L2, а опорные поднесущие транспортируют системную управляющую информацию уровня L1. Поднесущим присвоены номера от 0 на центральной частоте до ±546 на одном или другом конце распределения частот канала.
Помимо опорных поднесущих, находящихся в пределах каждого частотного сегмента, в зависимости от режима обслуживания в спектр вводятся до пяти дополнительных опорных поднесущих, а номера этих поднесущих таковы: -546, -279, 0, 279, 546. Общий эффект заключается в регулярном распределении опорных поднесущих по всему спектру. Для удобства обозначений каждой опорной поднесущей присвоен особый идентификационный номер между 0 и 60. Все опорные поднесущие нижних боковых полос показаны на фиг.6. Все опорные поднесущие верхних боковых полос показаны на фиг.7. На этих чертежах указана взаимосвязь между номерами опорных поднесущих и номерами МОРЧ-поднесущих.
На фиг.1-3 показаны количество поднесущих и центральная частота некоторых ключевых МОРЧ-поднесущих. Центральную частоту поднесущей вычисляют, умножая номер поднесущей на промежуток Δf между МОРЧ-поднесущими. Центр поднесущей под номером 0 находится на частоте 0 Гц. В этом контексте центральная частота является относительной для выделенного РЧ-канала, например, верхняя первичная основная боковая полоса ограничена поднесущими под номерами 356 и 546, центральные частоты которых расположены на 129,361 Гц и 198,402 Гц соответственно. Частотная протяженность первичной основной боковой полосы составляет 69,041 Гц (=198,402-129,361).
На фиг.8 представлена блок-схема модуля обработки управления системой. Канал управления системой (КУС (SCCH) транспортирует управляющую информацию и информацию о состоянии, используя поля в опорных поднесущих. Кроме того, несколько двоичных разрядов последовательности данных управления системой, названные «резервными», управляются с уровней выше L1 через первичный интерфейс зарезервированных данных управления и вторичный интерфейс зарезервированных данных управления. Режимы обслуживания предписывают все допустимые конфигурации логических каналов.
Под управлением более высоких уровней модуль обработки управления системой осуществляет сборку и дифференциальное кодирование последовательности двоичных разрядов (последовательности данных управления системой), предназначенных для каждой опорной поднесущей, как показано на фиг.8. Всего имеется до шестидесяти одной опорной поднесущей под номерами от 0 до 60, и эти поднесущие распределены по всему спектру, где осуществляется МОРЧ.
Как показано на фиг.8, модуль обработки управления системой принимает входные сигналы с уровня 2 через КУС. Используя эти входные сигналы управления системой, модуль 100 сборки данных управления системой создает последовательность двоичных разрядов управления системой протяженностью Tb для каждой из опорных поднесущих, количество которых составляет 61. Затем дифференциальный кодер 102 осуществляет дифференциальное кодирование каждой последовательности двоичных разрядов за раз. Результирующий выходной сигнал есть матрица R фиксированного размера 32×61. Размерность строк матрицы R соответствует количеству МОРЧ-символов на Tb, а размерность столбцов соответствует максимальному количеству активных опорных поднесущих на МОРЧ-символ. Матрица R доступна для модуля отображения МОРЧ-поднесущих со скоростью Rb. Кроме того, модуль обработки управления системой выдает подсчет блоков уровня L1 в уровень 2 со скоростью Rb через КУС.
Модуль сборки данных управления системой собирает всю управляющую информацию системы с уровня 2 и, компонуя ее вместе с управляющей информацией некоторого уровня, строит матрицу r, состоящую из 61 последовательностей 32-разрядных данных управления системой. Строки матрицы r имеют номера 0 … 31, а столбцы имеют номера 0 … 60. Каждая строка матрицы r содержит один двоичный разряд последовательности данных управления системой для каждой опорной поднесущей (перед дифференциальным кодированием) и передается в том же МОРЧ-символе. Строку под номером 0 заполняют первой. Любой заданный столбец матрицы r содержит последовательность данных управления системой для одной опорной поднесущей протяженностью 32 МОРЧ-символа.
На фиг.9 приведено схематическое представление последовательности 104 данных управления системой первичных опорных поднесущих. Эта последовательность данных управления системой состоит из полей двоичных разрядов, которые представляют собой различные компоненты управления системой. Опорные поднесущие, находящиеся в первичных боковых полосах, имеют поля, отличающиеся от тех, которые имеют опорные поднесущие, находящиеся во вторичных боковых полосах. Информация, заключенная в первичных опорных поднесущих, применяется только к первичным службам. Последовательность данных управления системой посредством первичных опорных поднесущих изображена на фиг.9 и охарактеризована в таблице 1. Двоичные разряды с 31-го по нулевой соответственно отображаются в строки с нулевой по 31-ю матрицы r. Вторичные опорные поднесущие охарактеризованы аналогичным образом.
Карта двоичных разрядов последовательности данных управления первичной системой
1=первичный и вторичный (полностью цифровой)
На фиг.10 представлена блок-схема дифференциального кодера 106. Двоичные разряды в каждом столбце матрицы r размером 32×61, собранные модулем сборки последовательности данных управления системой, подвергаются дифференциальному кодированию в соответствии с фиг.10 и выводятся с получением матрицы R в том же порядке. Концептуально, этот процесс можно рассматривать как работу параллельных дифференциальных кодеров, количество которых равно 61. Для отдельного дифференциального кодера двоичные разряды в одном столбце j матрицы r обрабатываются последовательно, при этом i принимает значения 0 … 31. За раз в дифференциальный кодер вводится один двоичный разряд последовательности данных управления системой. Этот входной двоичный разряд подвергается суммированию по модулю 2 с ранее запомненным выходным двоичным разрядом R[i-1][j] для формирования самого последнего выходного двоичного разряда R[i][j]. Результирующий поток выходных двоичных разрядов будет изменять полярность каждый раз, когда вводимый двоичный разряд будет иметь значение 1. Исходное состояние каждого дифференциального кодера - 0.
Опорные поднесущие модулируются повторяющейся 32-х разрядной тактирующей последовательностью двухпозиционной (двоичной) фазовой манипуляции (ДФМн (BPSK)), которую подвергают дифференциальному кодированию перед передачей. Опорные поднесущие служат нескольким целям: 1) разрешению проблемы неоднозначности поднесущих при захвате, 2) получению опорного сигнала локальной фазы для последующего когерентного обнаружения, 3) выборкам локального шума и/или помех для оценки информации о состоянии канала (ИоСК) и 4) получению информации о фазовой ошибке для отслеживания частоты и символов. Дифференциальное кодирование тактирующей ДФМн-последовательности позволяет обнаружить тактирующую ДФМн-последовательность до установления когерентного опорного сигнала, необходимого для остальных поднесущих. Комбинацию, обнаруженную путем дифференциального кодирования, затем используют для удаления модуляции данных из опорных поднесущих, оставляя информации о локальной фазе опорного сигнала, а также о выборках шума или помех. Это используют для оценки ИоСК, необходимой для последующего декодирования в соответствии с мягким решением.
На фиг.11 представлена блок-схема высокого уровня функционального модуля когерентного опорного сигнала и ИоСК. 11-ти двоичных разрядов синхронизации комбинации синхронизации блоков оказывается достаточно для уникального обозначения границ каждого блока, независимо от значений остальных двоичных разрядов, количество которых составляет 21. ДФМн для опорной поднесущей выбирают потому, что этот метод толерантнее к ухудшениям характеристик шума и канала, чем четырехпозиционная фазовая манипуляция (ЧФМн (QPSK)), полученная дифференциальным обнаружением. Кроме того, избыточность тактирующей ДФМн-последовательности по всем опорным поднесущим дает устойчивый опорный сигнал даже при наиболее жестких условиях помех и каналов. Различные поля в тактирующей ДФМн-последовательности (гибридного или цифрового сигнала, резервное, подсчета блоков, а также режима) подвергаются контролю на четность как с целью защиты от ошибок, так и с целью исключения изменений фазы опорного сигнала в конце каждого изменяющегося поля из-за дифференциального кодирования. Та же самая тактирующая ДФМн-последовательность (за исключением двухразрядного поля идентификатора (ИД) опорной поднесущей) избыточно передается во всех расположениях опорных поднесущих и совпадает с блоком перемежителя, определенным полем подсчета блоков.
Модуль когерентного опорного сигнала и ИоСК генерирует опорный сигнал фазы для когерентного обнаружения поднесущих данных и надлежащим образом взвешивает результирующие мягкие решения на основании текущего состояния канала. Затем комплексные взвешенные мягкие решения масштабируются, ограничиваются и запоминаются в надлежащих матрицах обращенного перемежителя для вывода в модуль обработки двоичных разрядов.
Модуль взвешенных мягких решений сглаживается во времени с образованием набора весов (весовых коэффициентов) синхронизации для модуля управления отслеживанием (слежением). Кроме того, мягкие решения с полной точностью и плавающей запятой также пропускаются в модуль управления слежением, чтобы обнаружить ошибочные условия слежения за символами.
На фиг.12 представлена подробная блок-схема высокого уровня функционального модуля когерентного опорного сигнала и ИоСК. В каждый момент наличия МОРЧ-символа происходит прием верхних первичных, нижних первичных и вторичных символов в частотной области, подвергнутых выравниванию фаз. Каждый символ состоит из некоторого количества опорных поднесущих и поднесущих данных. Опорные поднесущие используются для генерирования когерентного опорного сигнала фазы и весов ИоСК, которые затем применяются к поднесущим данных для создания мягких решений, предназначенных для обработки двоичных разрядов и управления слежением. Кроме того, веса ИоСк используются для получения весов синхронизации для модуля управления слежением. Модуль когерентного опорного сигнала и ИоСК не выполняется до тех пор, пока модуль синхронизации кадров и управления системой не обнаруживает место нахождения границы субкадра (блока уровня L1).
Подробная блок-схема, представленная на фиг.12, показывает, что модуль когерентного опорного сигнала и ИоСк состоит из семи основных функциональных компонентов:
а) компонента 110 удаления данных из опорных поднесущих;
б) компонента 112 оценки опорных поднесущих;
в) компонента 114 оценки дисперсии шума;
г) компонента 116 взвешивания когерентного опорного сигнала фазы;
д) компонента 118 генерирования весов синхронизации;
е) компонента 120 интерполяции опорных поднесущих;
ж) компонента 122 управления мягкими решениями.
Работа и взаимодействие этих функциональных компонентов вкратце описана ниже. С помощью кодированных последовательностей данных управления системой из модуля синхронизации кадров/управления системой компонент удаления данных из опорных поднесущих вырезает данные из каждой опорной поднесущей, подвергнутой выравниванию фаз, в принимаемом МОРЧ-символе. Удаление модуляции из опорных поднесущих обеспечивает точную оценку фазы принимаемого сигнала для когерентного обнаружения.
Опорные поднесущие, из которых вырезаны данные, затем подвергаются фильтрации - временной и частотной - компонентом оценки опорных поднесущих. Модуль каждой отфильтрованной опорной поднесущей служит для оценки ее средней мощности сигнала, а угол обеспечивает когерентный опорный сигнал фазы, необходимый для когерентного обнаружения демодулированных поднесущих МОРЧ-данных.
Чтобы оптимизировать работу декодера Витерби, амплитуду каждой демодулированной МОРЧ-поднесущей нужно подвергнуть взвешиванию с помощью оценки ее отношения «сигнал - шум». Эта «оценка ИоСК» вычисляется и применяется посредством компонента взвешивания когерентного опорного сигнала фазы. Оценка мощности сигнала - это просто модуль каждой отфильтрованной опорной поднесущей, а оценка мощности шума каждой опорной поднесущей обеспечивается компонентом оценки дисперсии шума. Компонент взвешивания когерентного опорного сигнала фазы делит отфильтрованные опорные поднесущие на их соответствующие оценки дисперсии шума, формируя когерентные опорные сигналы фазы, взвешенные по ИоСК, для каждой опорной поднесущей.
Затем компонент интерполяции опорных поднесущих осуществляет наложение когерентных опорных сигналов фазы, взвешенных по ИоСК, на поднесущие данных. Этот компонент проводит интерполяцию между когерентными опорными сигналами фазы опорных поднесущих и применяет интерполированные опорные сигналы к соответствующим поднесущим данных. Результирующие мягкие решения с плавающей запятой пропускаются в модуль управления слежением для обнаружения ошибочных условий слежения за символами. Кроме того, компонент управления мягкими решениями масштабирует и квантует мягкие решения с плавающей запятой, а также размещает их в надлежащих матрицах обращенного перемежителя для вывода в модули обработки сигналов и получения частоты ошибок по битам (ЧОпБ (BER)).
Компонент генерирования весов синхронизации вычисляет модуль когерентных опорных сигналов фазы, взвешенных по ИоСК, сглаживает их во времени и пропускает их на управление слежением для использования в качестве весов синхронизации.
И первичные, и вторичные боковые полосы обрабатываются основными функциональными компонентами. Входными сигналами в модуль когерентного опорного сигнала и ИоСК являются выровненные символы, кодированные последовательности данных управления системой, группа сегментов, информация буфера задержки ИоСК, состояние синхронизации и данные управления системой.
Выровненные символы используются для генерирования когерентного опорного сигнала фазы и весов ИоСК, которые применяются к поднесущим данных для создания выходных мягких решений. В каждый момент наличия МОРЧ-символа из модуля выравнивания фаз выдаются верхний первичный выровненный символ, нижний первичный выровненный символ. Кроме того, модуль выравнивания фаз также выдает вторичный выровненный символ с частотой Rs (344,53125 Гц) следования МОРЧ-символов. Каждый верхний или нижний первичный символ состоит из 267-ми комплексных выборок. Каждый вторичный символ состоит из 559-ти комплексных выборок.
Кодированные последовательности данных управления системой используются для вырезания данных из опорных поднесущих в выровненных символах. Модуль синхронизации кадров/управления системой подает первичные и вторичные кодированные последовательности данных управления системой в модуль когерентного опорного сигнала/ИоСк. Подаются четыре первичных и четыре вторичных последовательности: по одной для каждого значения идентификации опорной поднесущей (ИДОП). Каждая последовательность обеспечивает одно значение на частоте следования символов.
Хотя все боковые полосы обрабатываются одинаково функциональными компонентами в модуле когерентного опорного сигнала/ИоСК, поднесущие, на которых они работают, могут изменяться с режимом обслуживания. Группа сегментов идентифицирует частотные сегменты, которые заполняются в пределах некоторого заданного символа. Она указывает, какие первичные расширенные сегменты и вторичные боковые полосы доступны для обработки. В каждое время символа из исполнительного демодулятора подается одно значение группы сегментов.
Информация буфера задержки ИоСК - это просто адрес последнего элемента 22-х символьного кольцевого буфера задержки ИоСК. Этот буфер выстраивает входные выровненные символы с их соответствующими когерентными опорными сигналами фазы, взвешенными по ИоСК. Информация буфера задержки ИоСК используется для упаковки указателей (ссылок) кольцевого буфера. Существуют два входа информации буфера задержки ИоСК: один - для первичных боковых полос, и один - для вторичных блоковых полос. Каждый вход обеспечивает одно значение на частоте следования символов.
Состояние синхронизации состоит из двух флагов: один - от модуля синхронизации кадров (управления системой), указывающий действительный подсчет блоков, а другой - от исполнительного демодулятора, указывающий, что входные выровненные символы претерпели достаточную задержку, чтобы обеспечить надлежащее выстраивание со своими когерентными опорными сигналами фазы, взвешенными по ИоСК. Оба значения состояния синхронизации подаются в каждое время символа.
Данные управления системой, подаваемые модулем синхронизации кадров/управления системой, включают в себя первичный режим обслуживания, вторичный режим обслуживания и подсчет блоков. Режимы обслуживания используются компонентом управления мягкими решениями для определения места нахождения и количества выходных мягких решений. Подсчет блоков указывает номер текущего блока уровня L1 и используется компонентом управления мягкими решениями для определения, когда можно направлять мягкие решения в надлежащие матрицы обращенного перемежителя. Эти три значения данных управления системой подаются в каждое время символа.
Выходные сигналы модуля когерентного опорного сигнала/ИоСК представляют собой матрицы обращенного перемежителя, стартовые флаги обращенного перемежителя, первичные мягкие решения с полной точностью и веса синхронизации. В каждое время символа модуль когерентного опорного сигнала/ИоСК направляет квантованные мягкие решения в первичную и вторичную матрицы обращенного перемежителя. Количество мягких решений и матриц обращенного перемежителя, для которых они предназначены, определяются режимом обслуживания. Для каждого блока уровня L1 все мягкие решения в пределах матриц обращенного перемежителя пропускаются в модули обработки двоичных разрядов и получения ЧОпБ, первичных мягких решений с полной точностью и весов синхронизации исполнительным демодулятором.
Компонент удаления данных из опорных поднесущих вырезает модуляцию из входных опорных поднесущих, подвергнутых выравниванию фаз, используя последовательности кодированных данных управления системой из модуля синхронизации кадров управления системой. Это обеспечивает точную оценку фазы принимаемого сигнала для когерентного обнаружения.
Сначала из входных поднесущих, подвергнутых выравниванию фаз, вычитают опорные поднесущие. Нижняя первичная боковая полоса содержит опорные поднесущие под номерами от 0 до 14, вторичная боковые полосы содержат опорные поднесущие под номерами от 15 до 45, а верхняя первичная боковая полоса содержит опорные поднесущие под номерами от 46 до 60.
Модуляцию удаляют из опорных поднесущих, умножая комплексно-сопряженную величину данных опорной поднесущей на комплексное значение данных одной из четырех кодированных последовательностей данных управления системой. Нижеследующее уравнение иллюстрирует эту операцию для каждой опорной поднесущей в пределах каждого МОРЧ-символа:
y=x∗·(1+j)·pn,
где y - комплексное значение вырезанных данных опорной поднесущей, х - комплексное входное значение данных опорной поднесущей, n - номер (0, 1, 2 или 3) кодированной последовательности данных управления системой, а рn - надлежащее значение данных управления системой:
Величина (1+j)·pn отображает две точки ДФМн-совокупности, не искажаемые шумом.
В каждое время МОРЧ-символа происходит прием одного значения из каждой последовательности данных управления системой. Четыре кодированных последовательности данных управления системой, принимаемых из модуля синхронизации кадров/управления системой, модулируются четырьмя возможными номерами идентификаторов опорных поднесущих (ИДОП). Значения данных опорных поднесущих умножаются на значения данных управления системой, которые совместно используют те же самые ИДОП.
Операция удаления данных из опорных поднесущих для верхней первичной боковой полосы иллюстрируется на фиг.13. Операции удаления данных из опорных поднесущих для других боковых полос осуществляются аналогичным образом.
Компонент оценки опорных поднесущих осуществляет временную и частотную фильтрацию опорных поднесущих, из которых вырезаны данные. Амплитуда каждой отфильтрованной опорной поднесущей служит для оценки средней мощности сигнала, а угол служит для оценки ее когерентной опорной фазы.
Опорные поднесущие, из которых вырезаны данные, сначала пропускают через 11-отводный фильтр временной области с конечной импульсной характеристикой (КИХ-фильтр). Поскольку каждая опорная поднесущая фильтруется отдельно, имеются, по существу, 15 параллельных фильтров как для верхних, так и для нижних первичных боковых полос и 31 параллельный фильтр для вторичных боковых полос. Получаемые опорные поднесущие, подвергнутые временной фильтрации, затем подвергаются частотной фильтрации с помощью каскада из четырех 3-отводных КИХ-фильтров. Каждая стадия фильтрации осуществляется для всех опорных поднесущих в пределах МОРЧ-символа перед переходом к следующей стадии. Чтобы заполнить память фильтра для внешних опорных поднесущих, следует продублировать конечные точки (определенные группой сегментов). Подробные блок-схемы процесса оценки опорных поднесущих для первичных и вторичных боковых полос соответственно показаны на фиг.14 и 15 соответственно.
На фиг.14 представлена блок-схема оценки опорных поднесущих первичных боковых полос. На фиг.15 представлена блок-схема оценки опорных поднесущих вторичных боковых полос. Операция фильтрации во временной области для каждой опорной поднесущей в МОРЧ-символе n имеет следующий вид:

где y[n] - выходная опорная поднесущая, подвергнутая фильтрации во временной области, для МОРЧ-символа n, x[n] - входная опорная поднесущая, подвергнутая вырезанию, для МОРЧ-символа n, h[k] - массив коэффициентов КИХ-фильтра, а k - индекс суммирования фильтра. Для каждого МОРЧ-символа все опорные поднесущие подвергаются частотной фильтрации путем решения нижеследующих уравнений последовательно:
где y[m] - входная опорная поднесущая, подвергнутая фильтрации во временной области, h[k] - массив коэффициентов КИХ-фильтра, а k - индекс суммирования фильтра. В вышеуказанных уравнениях m - индекс опорной поднесущей, диапазон которого для конкретной боковой полосы является функцией группы сегментов. Кроме того, a[m], b[m], c[m] и d[m] - выходные сигналы первой, второй, третьей и заключительной ступеней КИХ-фильтра соответственно.
Во время операции частотной фильтрации первая и последняя опорные поднесущие в боковой полосе повторяются в начале и конце каждой стадии фильтрации соответственно, чтобы заполнить память фильтра для фильтрации первой и последней поднесущих. Для верхней первичной боковой полосы нижеследующие опорные поднесущие дублируются как функция группы сегментов: опорная поднесущая под номером 60 дублируется и размещается в избыточной ячейке памяти для всех групп сегментов; опорная поднесущая под номером 50 дублируется и размещается в положении опорной поднесущей под номером 49 для группы сегментов «Расширение 0» (режим МР1 обслуживания); опорная поднесущая под номером 49 дублируется и размещается в положении опорной поднесущей под номером 48 для группы сегментов «Расширение 1» (режим МР2 обслуживания); опорная поднесущая под номером 48 дублируется и размещается в положении опорной поднесущей под номером 47 для группы сегментов «Расширение 2» (режим МР3 обслуживания); и опорная поднесущая под номером 46 дублируется и размещается в избыточной ячейке памяти для группы сегментов «Расширение 4» (режимы МР4, МР5, МР6 и МР7 обслуживания). Фильтрация для других боковых полос проводится аналогичным образом.
Компонент оценки дисперсии шума вычисляет оценку мощности шума для каждой опорной поднесущей. Эта оценка мощности шума используется компонентом взвешивания когерентного опорного сигнала фазы с целью взвешивания отфильтрованных опорных поднесущих, подвергнутых вырезанию, с помощью оценок ИоСК.
Отфильтрованные опорные поднесущие из компонента оценки опорных поднесущих (сигнал) вычитаются из соответствующих им задержанных опорных поднесущих, подвергнутых вырезанию (сигнал плюс шум), для формирования комплексных оценок шума (сигнал + (шум - сигнал) = шум) для каждой опорной поднесущей в первичных и вторичных боковых полосах. Возведенный в квадрат модуль комплексных оценок шума затем подвергают частотной и временной фильтрации, получая усредненные оценки дисперсии шума для каждой опорной поднесущей.
Операция возведения модуля в квадрат проводится на всех значениях шума опорных поднесущих, что приводит к получению выборок дисперсии шума. Затем оценки дисперсии шума, подвергнутые частотной фильтрации, пропускают в фильтры с бесконечной импульсной характеристикой (БИХ-фильтры) для оценки шума. Имеется 15 отдельных БИХ-фильтров как для верхних, так и для нижних первичных боковых полос, а также 31 отдельный БИХ-фильтр для вторичных боковых полос (по одному фильтру для каждой выборки дисперсии шума опорной поднесущей). БИХ-фильтры являются двухполюсными интеграторами с потерями и с единичным коэффициентом усиления, которые усредняют входные выборки дисперсии шума. Такие операции осуществляются по одной в каждый момент наличия МОРЧ-символа. Из этих фильтров выдается оценочная усредненная дисперсия шума для каждой опорной поднесущей.
Подробные блок-схемы процесса оценки дисперсии шума для первичных и вторичных боковых полос показаны на фиг.16 и 17 соответственно. На фиг.16 представлена блок-схема оценки дисперсии шума первичных боковых полос. На фиг.17 представлена блок-схема оценки дисперсии шума вторичных боковых полос.
Операции вычитания и возведения модуля в квадрат для каждой опорной поднесущей в МОРЧ-символе n описываются следующим уравнением:
z[n]=|x[n-5]-y[n]|2,
где z[n] - выборка дисперсии шума, y[n] - отфильтрованная опорная поднесущая, а x[n-5] - подвергнутая вырезанию опорная поднесущая, которая задержана на пять символов для учета задержки КИХ-фильтра во временной области в компоненте оценки опорной поднесущей.
Операция частотной фильтрации идентична той, которая используется в компоненте оценки опорных поднесущих. Операция КИХ-фильтрации для каждой опорной поднесущей в МОРЧ-символе имеет следующий вид:

где  - оценка выходной дисперсии шума для МОРЧ-символа n, а v[n] - оценка входной дисперсии шума, подвергнутой частотной фильтрации. Коэффициенты фильтра вычисляют на основании двухполюсного интегратора с потерями и с α=1/16:
- оценка выходной дисперсии шума для МОРЧ-символа n, а v[n] - оценка входной дисперсии шума, подвергнутой частотной фильтрации. Коэффициенты фильтра вычисляют на основании двухполюсного интегратора с потерями и с α=1/16:
А=α2=0,00390625;
В=2·(1-α)=1,875;
С=-(1-α)2=-0,87890625.
Компонент взвешивания когерентного опорного сигнала фазы вычисляет и применяет веса ИоСК к каждой отфильтрованной опорной поднесущей. Эти веса ИоСК, которые служат для оценки отношения «сигнал - шум» каждой опорной поднесущей, в конечном счете применяются к каждой поднесущей данных для улучшения рабочих характеристик декодера Витерби. Поскольку модуль отфильтрованных опорных поднесущих отображает мощность сигнала, вес ИоСК вычисляется и применяется просто путем деления каждой отфильтрованной опорной поднесущей на соответствующую ей оценку дисперсии шума. Модуль получаемой комплексной опорной поднесущей представляет собой вес ИоСК, а угол - когерентный опорный сигнал фазы. Воплощение этого компонента описано ниже.
Отфильтрованные опорные поднесущие задерживаются на 16 символов, чтобы учесть задержку БИХ-фильтра в компоненте оценки дисперсии шума. Чтобы предотвратить деление на нуль, сначала к оценкам дисперсии шума добавляют малое смещение. Потом задержанные отфильтрованные опорные поднесущие взвешиваются путем деления на величины, обратные соответствующим им оценкам дисперсии шума, в результате чего получаются когерентные опорные сигналы фазы, взвешенные по ИоСК, для каждой опорной поднесущей в первичных и вторичных боковых полосах.
На фиг.18 представлена блок-схема взвешивания по ИоСК опорных поднесущих. Операция взвешивания по ИоСК для каждой опорной поднесущей в МОРЧ-символе имеет следующий вид:
где w[n] - выходная опорная поднесущая, взвешенная по ИоСК, для МОРЧ-символа n, - оценка входной дисперсии шума для МОРЧ-символа n, x[n-16] - входная задержанная отфильтрованная опорная поднесущая, а ε=10-11 - смещение, добавленное для предотвращения деления на нуль. Операция взвешивания по ИоСК идентична для всех боковых полос.
Веса синхронизации - это просто веса ИоСК, которые усреднены за большой период времени для удаления эффектов замираний сигнала. Модуль управления слежением использует веса синхронизации для коррекции слежения для своего соответствующего контура слежения за символами.
Веса синхронизации генерируются для каждого МОРЧ-символа путем вычисления модуля каждой отфильтрованной поднесущей, подвергнутой взвешиванию по ИоСК, в первичных боковых полосах и сглаживания результата с помощью БИХ-фильтра. Имеется в общей сложности 30 отдельных БИХ-фильтров (по одному для каждой опорной поднесущей). БИХ-фильтры - это двухполюсные интеграторы с потерями и с единичным коэффициентом усиления, которые усредняют веса ИоСК за большой период времени. Эти операции выполняются единожды в каждое время МОРЧ-символа.
Всегда генерируются все 30 весов синхронизации - даже в режимах обслуживания, при которых не заполняются расширенные боковые полосы. Это приемлемо потому, что веса ИоСК (а значит - и веса синхронизации) расширенных поднесущих автоматически минимизируются, если они не присутствуют.
На фиг.19 представлена блок-схема генерирования весов синхронизации. Комплексный модуль первичной опорной поднесущей, взвешенной по ИоСК, в МОРЧ-символе вычисляют следующим образом:
где xi и xq - действительная и мнимая части входной опорной поднесущей, подвергнутой фильтрации и взвешенной по ИоСК, а w - соответствующий вес ИоСК.
Операция БИХ-фильтрации для каждой первичной опорной поднесущей МОРЧ-символа n имеет следующий вид:
y[n]=A·w[n]+B·y[n-1]+C·y[n-2],
y[n] - выходной вес синхронизации, связанный с конкретной опорной поднесущей в МОРЧ-символе n, а w[n] - входной вес ИоСК. Коэффициенты фильтра вычисляют на основании двухполюсного интегратора с потерями и с α=1/128:
А=α2=0,00006103515625;
В=2·(1-α)=1,984375;
С=-(1-α)2=-0,984436035.
Операция генерирования весов синхронизации проводится только на первичных боковых полосах.
Компонент интерполяции опорных поднесущих применяет когерентные опорные сигналы фазы, взвешенные по ИоСК, к каждой поднесущей данных. Когерентный опорный сигнал фазы генерируется для каждой поднесущей данных путем интерполяции между опорными когерентными сигналами фазы опорных поднесущих. Результирующие когерентные сигналы фазы поднесущих данных затем умножают на соответствующие поднесущие данных, чтобы получить когерентно обнаруживаемые, взвешенные по ИоСК комплексные мягкие решения.
Для первичных боковых полос отфильтрованные опорные поднесущие, взвешенные по ИоСК, пропускаются через фильтр частотной области, который имеет коэффициент интерполяции 19. Этот интерполяционный фильтр представляет собой 37-отводный КИХ-фильтр, который «скользит» по всем активным опорным поднесущим. Поскольку он не проводит временную фильтрацию, интерполяционный фильтр работает только над данными из одного МОРЧ-символа.
В процессе интерполяции сначала происходит вставка 18-ти комплексных нулей в местах между каждым отфильтрованным опорным, что и реализует коэффициент интерполяции 19. Кроме того, 18 нулей добавляются перед первой опорной поднесущей и после последней опорной поднесущей - для надлежащей инициализации фильтра. После этого КИХ-фильтр работает над данными, заполненными нулями. Когда он «скользит» по частоте, в пределах фильтра в некоторый момент времени будут - по большей мере - два опорных сигнала (ненулевых входных сигнала). Когда фильтр центрирован на опорном сигнале, в пределах фильтра имеется всего один опорный сигнал, и он выровнен по отношению к центральному отводу. В этом случае фильтр просто возвращает входную опорную поднесущую, которая позднее отбрасывается.
На фиг.20 приведено схематическое представление иллюстрации интерполяции опорных поднесущих для первичных боковых полос. Интерполяционную фильтрацию для вторичных боковых полос проводят аналогичным образом.
Сразу же после того как некоторый символ отфильтрован, опорные поднесущие отбрасываются из выходного сигнала, и остаются лишь когерентные опорные сигналы фазы, взвешенные по ИоСК, для каждой поднесущей данных. Интерполированные опорные сигналы фазы затем умножаются на соответствующие им выровненные поднесущие данных для создания выходных мягких решений. Перед комплексным умножением поднесущие данных, подвергнутые выравниванию фаз, должны быть надлежащим образом синхронизированы с интерполированными опорными сигналами фазы. Это достигается путем задержки поднесущих данных, подвергнутых выравниванию фаз, на 21 символ. Задержка учитывает общую задержку, вносимую КИХ-фильтром, осуществляющим фильтрацию опорных поднесущих во временной области (5 символов), и БИХ-фильтром оценки дисперсии шума (16 символов).
На фиг.21 представлена блок-схема интерполяции опорных поднесущих. Операция интерполяционной фильтрации для каждой поднесущей n в МОРЧ-символе имеет следующий вид:
где  - заполненный нулями входной сигнал для МОРЧ-поднесущей
- заполненный нулями входной сигнал для МОРЧ-поднесущей  , y[n] - интерполированный когерентный опорный сигнал фазы для МОРЧ-поднесущей n, h[k] - массив коэффициентов КИХ-фильтра, а k - индекс суммирования фильтра. Количество К отводов фильтра составляет 25 для вторичных защищенных боковых полос и 37 - для всех остальных боковых полос.
, y[n] - интерполированный когерентный опорный сигнал фазы для МОРЧ-поднесущей n, h[k] - массив коэффициентов КИХ-фильтра, а k - индекс суммирования фильтра. Количество К отводов фильтра составляет 25 для вторичных защищенных боковых полос и 37 - для всех остальных боковых полос.
Для минимизации канальных потерь применяется предусматриваемое для мягких решений декодирование по алгоритму Витерби с взвешиванием для суммирования максимальных отношений (СМО (MRC)) для когерентно обнаруженных символов ЧФМн-поднесущих. Поскольку уровни помех и сигналов изменяются с изменением поднесущих (частоты) и времени из-за избирательного замирания, то со временем ИоСК становится необходимой для адаптивного регулирования взвешивания для символов мягких решений, используемых в качестве метрик ответвления при декодировании по алгоритму Витерби. Метод оценки ИоСК должен быть разработан с учетом ширины полосы замирания величиной примерно до 13 Гц для максимальных скоростей транспортных средств в полосе ЧМ-радиовещания - около 100 МГц. Разброс задержек, составляющий несколько микросекунд, является типичным, хотя, судя по результатам измерений, в некоторых средах бывали разбросы и побольше. Метод оценки как опорного сигнала фазы, так и ИоСК, исходя из опорных поднесущих, проиллюстрирован на фиг.21. Получение этого веса ИоСК предусматривает взвешивание амплитуд для СМО наряду с коррекцией фазы для ошибок фазы в канале.
Работа в соответствии с методом восстановления ИоСК согласно фиг.21 предполагает захват частоты и слежение за частотой поднесущих, а также согласование по времени символов применительно к МОРЧ-символам. Методы захвата частоты и тактирования символов предусматривают использование свойств циклического префикса. Слежение за частотой и символами достигается посредством наблюдения за дрейфом фазы от символа к символу в зависимости от времени или частоты (среди поднесущих).
После захвата частоты и согласования по времени символов предпринимается попытка синхронизации комбинации синхронизации блоков тактирующей ДФМн-последовательности путем перекрестной корреляции дифференциально-обнаруженной ДФМн-последовательности с комбинацией синхронизации блоков (Block Sync). Дифференциальное обнаружение проводят над всеми поднесущими в предположении, что место нахождения «обучающих» поднесущих сначала неизвестно. Осуществляют перекрестную корреляцию известной комбинации синхронизации блоков с обнаруженными двоичными разрядами каждой поднесущей. Корреляцию поднесущих признают при обнаружении совпадения всех 11-ти двоичных разрядов комбинации синхронизации блоков. Синхронизация блоков (и разрешение проблемы неоднозначности поднесущих) устанавливается, когда количество корреляций поднесущих совпадает с пороговыми критериями или превышает их (например, 4 корреляции поднесущих, разнесенные на несколько поднесущих, количество которых кратно 19 поднесущим).
После установления синхронизации блоков можно декодировать изменяющиеся поля тактирующей ДФМн-последовательности. Дифференциально-обнаружимые двоичные разряды этих изменяющихся полей обнаруживаются на основе «решения большинством голосов» по «обучающим» поднесущим, так что декодирование оказывается возможным, когда некоторые из этих поднесущих или двоичных разрядов искажены. 16-ти блокам в пределах каждого кадра модема (Modem Frame) дают номера от 0 до 15. Тогда содержание самого старшего двоичного разряда (ССДР (MSB)) поля «подсчет блоков» (Block Count) всегда задают нулевым, поскольку подсчет блоков никогда не превышает 15. Синхронизация кадров модема устанавливается в соответствии со знанием поля «подсчет блоков».
Когерентное обнаружение этого сигнала требует некоторого когерентного опорного сигнала фазы. Декодированная информация из тактирующей ДФМн-последовательности используется для удаления модуляции из «обучающих» поднесущих с оставлением информации об опорном сигнале локальной фазы и шуме. Обращаясь к фиг.26, отмечаем, что сначала из принимаемых «обучающих» поднесущих удаляют модуляцию двоичной (±1) тактирующей последовательности, умножая упомянутые поднесущие на синхронизированную, декодированную и дифференциально-перекодированную тактирующую ДФМн-последовательность. Для сглаживания результирующих символов во времени используют КИХ-фильтр, что дает комплексно-сопряженную оценку локальной фазы и амплитуды. Это значение задерживается и умножается на оценку величины, обратной дисперсии шума. Дисперсию шума оценивают, вычитая сглаженную оценку локальной фазы и амплитуды из входных символов (после надлежащей синхронизации), путем возведения в квадрат и фильтрации комплексных выборок шума с последующей аппроксимацией упомянутой обратной величины (с защитой от деления на нуль). Этот вес ИоСК интерполируют по 18-ти поднесущим между парами соседних «обучающих» поднесущих. Результирующие локальные веса ИоСК затем используют для умножения на соответствующие локальные символы, несущие данные.
Для оценки комплексного когерентного опорного сигнала α в каждом местоположении поднесущей используют 11-отводный КИХ-фильтр. Больший КИХ-фильтр, имеющий больше отводов, мог бы снизить ошибку оценки, когда статистики сигналов постоянны, но ширина полосы при этом оказалась бы слишком малой для слежения за носящими доплеровский характер изменениями в сигнале на максимальных скоростях, характерных для автострад. Следовательно, предпочтительны 11-отводные фильтры с клинообразной симметричной гауссообразной импульсной характеристикой. Вместо БИХ-фильтра используют симметричный КИХ-фильтр ввиду его свойства линейности фазы, которое дает нулевую ошибку смещения для (приблизительно) кусочно-линейной характеристики замирания в канале в диапазоне частот фильтра. Этот сглаженный когерентный опорный сигнал, выдаваемый из КИХ-фильтра, вычитается из задержанных входных выборок, что дает мгновенные выборки шума. Эти выборки шума возводятся в квадрат и обрабатываются БИХ-фильтром, что дает оценку дисперсии шума, σ2. Этот фильтр имеет ширину полосы, более узкую, чем КИХ-фильтр, что позволяет получить в целом более точную оценку дисперсии шума. После надлежащих задержек выборок для согласования с задержками фильтра вычисляют вес α∗/σ2 символа для каждой поднесущей. Эти значения сглаживают и интерполируют по поднесущим для каждого МОРЧ-символа, чтобы получить более точные оценки. Этот вес является уникальным для каждого МОРЧ-символа, а каждая поднесущая обеспечивает локальную (временную и частотную) оценку и вес для символов, образующих метрики ветвления для последующего декодера Витерби.
Только что описанная система была разработана для обеспечения соответствия транспортным средствам со стационарными антеннами. Описаны многочисленные функции опорных поднесущих применительно к захвату, слежению, оценке информации о состоянии канала (ИоСК) и когерентной работе. Эта система была разработана для когерентной работы в полосе FM (ЧМ)-радиовещания (88-108 МГц) при ширине полосы замирания, соответствующей транспортным средствам, движущимся со скоростями, характерными для автострад. Различные параметры когерентного слежения оцениваются с использованием фильтров, ширины полос которых приближаются к ожидаемой ширине (примерно 13 Гц) полосы доплеровских частот. При стационарной антенне соответствующие статистики слежения за входным сигналом согласно алгоритмам слежения предполагаются изменяющимися с частотой, не превышающей ширину полосы доплеровских частот. Вместе с тем, использование антенн с коммутационным разнесением в окнах транспортных средств вносит резкие переходные процессы в когерентное слежение за цифровым сигналом, что ухудшает цифровые рабочие характеристики. Пример такой антенной системы с коммутационным разнесением приведен в патенте США № 6633258.
Антенная система с коммутационным разнесением включает в себя несколько антенных элементов (например, от 2-х до 4-х), которые обычно размещены внутри стекла переднего или заднего окон транспортного средства. Эти элементы соединены с модулем коммутации разнесения, который динамически выбирает один элемент или комбинацию элементов для выдачи сигнала РЧ антенны в приемник. Функциональная диаграмма конфигурации коммутации разнесения показана на фиг.22. Несколько элементов - 200, 202, 204 и 206 - соединены с модулем 208 коммутации разнесения. Модуль коммутации разнесения включает в себя вход 210 для приема управляющего сигнала. Управляющий сигнал сравнивается с порогом оценки, как показано в блоке 212, и управляющий сигнал и результаты сравнения вводятся в усилитель 214. Блок 216 управления коммутацией реагирует на выходной сигнал усилителя, управляя коммутатором 218 антенны. Этот коммутатор соединяет одну из антенн с антенным входом 220 приемника.
Модуль коммутации разнесения осуществляет оперативный контроль сигнала из приемника для определения того, когда надо проводить коммутацию. Типичный алгоритм модульной «коммутации вслепую» устанавливает порог коммутации на основании среднего уровня сигнала промежуточной частоты (ПЧ) приемника. Когда сигнал ПЧ падает ниже этого порога, коммутатор вслепую выбирает альтернативный элемент в ожидании получения лучшего сигнала. Если новый сигнал превышает порог, то коммутатор поддерживает выбор нового элемента; в противном случае модуль коммутации разнесения выбирает альтернативный элемент по истечении некоторого минимального времени задержки срабатывания. Этот процесс продолжается, и при этом модуль коммутации разнесения непрерывно обновляет свой порог (свои пороги).
На фиг.22 представлена функциональная схема характерной антенной системы с коммутационным разнесением. Теория, заложенная в основу работы алгоритма коммутации разнесения, основана на разных мгновенных характеристиках замирания различных антенных элементов. Замирание при многолучевом распространении приводит к увеличению многочисленных лучей (многолучевых распространений) сигнала, прибывающего на принимающий антенный элемент в разные моменты времени. Например, длина волны при 100 МГц составляет приблизительно 10 футов. Если два распространения сигнала прибывают в моменты времени, отличающиеся на одну длину волны, т.е. 10 наносекунд (разность хода 10 футов), то эти сигналы будут складываться в фазе. Точно так же, если два луча прибывают на антенный элемент с временной разницей, соответствующей полудлине волны, то эти сигналы, складывающиеся в противофазе, будут взаимно уничтожаться. Это сложение или взаимное уничтожение является динамическим в движущемся транспортном средстве, где ширина полосы доплеровских частот приближенно определяется выражением BW=fc·s/c (где fc - частота несущей, s - скорость транспортного средства, c - скорость света). Ширина полосы доплеровских частот составляет приблизительно 10 Гц при скоростях, типичных для автострад. Следовательно, вектор сигнала (комплексная версия амплитуды и фазы) одного антенного элемента может изменяться с частотой примерно 10 Гц в этом примере. Тогда когерентное слежение за опорным сигналом и состоянием канала должно быть согласовано с шириной полосы 10 Гц, чтобы поддерживать когерентное слежение за сигналом.
Типичные антенные элементы в транспортном средстве могут подвергаться воздействию некоторых мгновенных условий замирания (в зависимости от промежутка между элементами и направлений многолучевых распространений). Например, один элемент может находиться на нуле замирания, а другой элемент - на максимуме. В транспортном средстве с несколькими такими элементами возникнет вероятность, что некоторый альтернативный элемент будет принимать существенно больший сигнал, когда данный элемент испытывает замирание (взаимное уничтожение сигналов). Типичные элементы в многоэлементной антенной ЧМ-системе с разнесением будут иметь мгновенные характеристики замирания, которые можно было бы сделать до некоторой степени коррелированными, но их оставляют достаточно не коррелированными, чтобы можно было достичь желаемого усиления разнесения с целью улучшения рабочих характеристик. На фиг.23 представлен график действительной 226 и мнимой 228 составляющих сигнала замирания (без шума) в случае антенного элемента, коммутируемого через каждые 100 символов.
В этом примере предполагается, что время коммутации, характерное для модуля коммутации разнесения, составляет порядка 10 микросекунд, а минимальное время задержки срабатывания составляет порядка 10 миллисекунд. Время коммутации порядка 10 микросекунд не оказывает заметного влияния на демодулированный ЧМ-сигнал, а общее улучшение разнесения при частотной модуляции может оказаться существенным, поскольку предотвращаются замирания сигналов. Вместе с тем, переходный процесс коммутации негативно влияет на когерентно отслеживаемый цифровой сигнал. Задача состоит в том, чтобы найти способ когерентного слежения, который компенсирует переходные процессы коммутации в антенной системе с коммутационным разнесением.
Проблему можно вкратце изложить следующим образом. Коммутация антенного модуля обуславливает скачкообразный переходный процесс в когерентном сигнале, причем сам сигнал непосредственно перед переходным процессом или после него является приблизительно когерентным. Фильтрация с конечной импульсной характеристикой (КИХ-фильтрация) скачкообразного переходного процесса искажает оценочный опорный сигнал α когерентного канала, влияя на диапазон выборок, равный длине КИХ-фильтра (11 отводов). Это искажение в опорном сигнале когерентного канала увеличивает модуль выборок шума в результате вычитания этого опорного сигнала из входных выборок. Хотя шум увеличивается лишь в окрестности переходного процесса, фильтр с бесконечной импульсной характеристикой (БИХ-фильтр) расширяет этот пик шума на диапазон БИХ-фильтра. Это дает эффект занижения оценки дисперсии шума в ближайшей окрестности переходного процесса, тогда как завышение при оценке во временном диапазоне БИХ-фильтра в ближайшей окрестности переходного процесса не происходит. Как искаженный опорный сигнал когерентного канала, так и ошибки дисперсии шума вносят вклад в ухудшение цифрового сигнала.
На фиг.24 представлен график действительной и мнимой составляющих отфильтрованного когерентного опорного сигнала замирания в окрестности переходного процесса на символе под номером 200 при отношении «сигнал - шум» (ОСШ), составляющем 10 дБ. Фиг.24 иллюстрирует оценочный когерентный опорный сигнал в окрестности скачкообразного переходного процесса коммутации. Сплошные линии 230 и 232 представляют сглаженные значения (α) комплексного коэффициента усиления канала и показывают влияние 11-отводного КИХ-фильтра, в котором опорный сигнал искажается в окрестности переходного процесса. КИХ-фильтр обладает эффектом сглаживающей интерполяции (искажения) выборок с любой стороны от переходного процесса коммутации. Пунктирные линии 234 и 236 иллюстрируют лучшую оценку когерентного сигнала, в которой влияние оказывается только на символ, подвергающийся воздействию переходного процесса.
На фиг.25 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 20 дБ). Линия 240 отображает выборку шума, вводимую в БИХ-фильтр, а линия 242 отображает отфильтрованный выходной сигнал. Можно показать, что входные выборки шума (возведенные в квадрат) увеличиваются в ближайшей окрестности переходного процесса. На самом деле, это происходит ввиду искажения опорного сигнала когерентного канала из-за 11-отводного КИХ-фильтра. Хотя выход БИХ-фильтра реагирует на пики шума, эти пики претерпевают локальное подавление у переходного процесса, но распространяются на протяжении БИХ-фильтра. Эти ошибки в локальной оценке дисперсии шума вносят вклад в ухудшенные цифровые рабочие характеристики.
Решение можно вкратце изложить следующим образом. Когерентного слежения можно достичь с любой стороны (во времени) от переходного процесса коммутации, как показано ранее на фиг.24. Фильтры когерентной оценки не могут использовать выборки сигналов, которые с двух сторон охватывают переходный процесс, поэтому следящие фильтры могут использовать только выборки сигналов вплоть до переходного процесса (не включительно) с любого направления во времени.
Один возможный способ коррекции ошибки скачкообразного переходного процесса предусматривает идентификацию временного расположения переходного процесса. Хотя (теоретически) должна существовать возможность неявного сообщения момента коммутации в модем приемника, это может оказаться практически не осуществимым. Для модема предпочтительно надежное обнаружение переходного процесса в рамках алгоритмов когерентного слежения. Алгоритмы когерентного слежения можно модифицировать в окрестности переходного процесса, чтобы обеспечить приблизительно когерентное слежение в ближайшей окрестности переходного процесса, за исключением символа, где происходил переходный процесс. Излишне говорить, что ошибка в оценке дисперсии шума возникает из-за ошибки в опорном сигнале когерентного канала.
Сложность алгоритма обнаружения переходных процессов и ухудшение, обуславливаемое ложным обнаружением переходных процессов, стимулировали разработку значительно более простого алгоритма, что привело к улучшенным рабочих характеристикам.
В канале усредненного белого гауссова шума (УБГШ (AWGN)) линейная фильтрация опорного сигнала когерентного канала и оценка шума дают почти оптимальные результаты. Тип линейного фильтра и временной диапазон фильтра зависят от статистики замирания, а более конкретно от автокорреляционной функции интересующего параметра. Симметричный 11-отводный КИХ-фильтр, аппроксимирующий эту автокорреляционную функцию при скоростях, характерных для автострад, был использован в исходной конструкции в качестве резонного компромисса между уменьшением ошибки (дисперсии) оценки и быстротой оценки для слежения за параметром при замирании. Для оценки дисперсии шума был использован БИХ-фильтр, поскольку линейная фаза не создает проблем при наличии шума. Оба эти фильтра оценки были усовершенствованы посредством дополнительной частотной фильтрации по поднесущим с использованием эффективного частотного диапазона, который удовлетворяет среде избирательного замирания (частотной автокорреляции). Эти фильтры дают хорошие результаты в канале УБГШ, при замирании и в предположении резонно медленной функции автоматической регулировки усиления (АРУ), которая должна быть медленнее, чем динамика замирания. На фиг.26 представлена блок-схема когерентной оценки опорного сигнала и шума.
В некоторых автомобильных приемниках применяются антенны с коммутацией разнесения и схемами АРУ большего быстродействия. Фильтры когерентного опорного сигнала и оценки шума больше не подходят для этих применений. Кроме того, помеха от первых соседних ЧМ-сигналов не является УБГШ и имеет более импульсообразную характеристику, вследствие чего можно добиться некоторого улучшения посредством надлежащих модификаций методов реализации фильтров оценки. Обнаружение переходных процессов и последующее регулирование когерентного опорного сигнала можно использовать наряду с модификацией оценки шума для решения этого вопроса.
Хорошо известно, что медианная фильтрация - вместо линейной (КИХ- или БИХ-) фильтрации - является способом уменьшения шума оценки с одновременным сохранением скачкообразных изменений в параметрах оценки, а также с уменьшением влияния импульсного шума. Эта медианная фильтрация может удобно заменить обнаружение переходного процесса и регулирование когерентного опорного сигнала. Некоторые важные характеристики медианного фильтра анализируются и описываются ниже для демонстрации его пригодности к использованию в принимающей системе.
Одной важной характеристикой медианного фильтра является уменьшение дисперсии ошибки оценки когерентного опорного сигнала и шума. Это уменьшение сравнимо с исходными фильтрами, а также сравнимо с пределом Крамера-Рао, который является наименьшей возможной ошибкой оценки для любого фильтра (линейного или нелинейного), предназначенного для некоторого заданного количества выборок (т.е. имеющего некоторое заданное количество отводов фильтра). В этом случае ошибка оценки накладывается только на такой шум, как УБГШ.
Сначала проанализируем исходный 11-отводный КИХ-фильтр, используемый для когерентной оценки опорного сигнала. 11 отводов фильтра нормализованы таким образом, что сумма соответствующих коэффициентов равна единице, что дает коэффициент усиления по постоянному току, равный единице. На фиг.27 представлен график в случае 11-отводного КИХ-фильтра для когерентной оценки опорного сигнала одиночной опорной поднесущей.
Далее описывается фильтр, используемый для сглаживания оценок по опорным поднесущим. Этот фильтр имеет 9 отводов (действующих), нормализованных таким образом, что сумма соответствующих коэффициентов равна единице, что дает коэффициент усиления по постоянному току, равный единице. Фильтрация поднесущих на оконечностях верхних или нижних цифровых боковых полос не является точной из-за усечения диапазона фильтра в концевых точках. Этот фильтр охарактеризован на фиг.28. Фиг.28 иллюстрирует график в случае использования частотного фильтра для получения опорных поднесущих.
Далее проводится сравнение уменьшения ошибки оценки. Отношение дисперсии выходных выборок фильтра к дисперсии входных выборок - в предположении, что некоторый постоянный параметр искажается посредством УБГШ, - равно сумме квадратов нормализованных коэффициентов фильтра, уменьшение_дисп= . Уменьшение дисперсии 11-отводного фильтра составляет 0,127 или около -9 дБ. Аналогичное уменьшение для 9-отводного частотного КИХ-фильтра составляет 0,196 или около -7 дБ. Рабочие характеристики уменьшения ошибки этих фильтров можно сравнить с медианными фильтрами и пределом Крамера-Рао.
. Уменьшение дисперсии 11-отводного фильтра составляет 0,127 или около -9 дБ. Аналогичное уменьшение для 9-отводного частотного КИХ-фильтра составляет 0,196 или около -7 дБ. Рабочие характеристики уменьшения ошибки этих фильтров можно сравнить с медианными фильтрами и пределом Крамера-Рао.
Для выборок постоянного (по диапазону фильтра с N отводами) параметра α, искаженного посредством УБГШ, логарифмическая функция правдоподобия имеет вид:
и тогда результирующий предел Крамера-Рао для постоянного параметра в условиях УБГШ упрощается, принимая вид:
Тогда теоретическая минимальная дисперсия для фильтра с N отводами является просто входной дисперсией, деленной на количество отводов. Это соответствует предположению, что при равных (одинаковых) весах отводов нельзя достичь минимальной оценки дисперсии; вместе с тем, это хорошо сработало бы при замирании. На фиг.29 представлен график влияний типа фильтра на уменьшение ошибки оценки для когерентного опорного сигнала.
Хотя медианный фильтр дает увеличение дисперсии ошибки примерно на 2 дБ относительно предела Крамера-Рао в условиях УБГШ, реальные колоколообразные КИХ-фильтры позволяют иметь рабочие характеристики, более близкие к медианным фильтрам при том же самом количестве отводов. Для распределений шума, которые имеют медленно убывающие «хвосты» или являются более импульсообразными, чем гауссов шум, рабочая характеристика медианного фильтра увеличивается, тогда как рабочая характеристика линейного фильтра остается той же самой. В качестве примера с лапласовым шумом отметим, что рабочая характеристика медианного фильтра на 3 дБ лучше при уменьшении дисперсии ошибки, чем у линейного фильтра с тем же количеством отводов. Конечно, предел Крамера-Рао для этого нового случая больше не удовлетворяет КИХ-фильтру с одинаковыми весами отводов.
Ухудшение рабочих характеристик в условиях УБГШ из-за этих фильтров можно аппроксимировать, вычисляя дополнительный шум (дисперсию ошибки оценки), помимо дисперсии фактического шума символов, во время обнаружения каждого символа. 9-отводный фильтр частотного диапазона используется независимо от 11-отводного КИХ- или медианного фильтра, осуществляющего временную фильтрацию. 9-отводный частотный фильтр не влияет на реакцию на скачок (время) из-за коммутации. Потери для случаев исходного 11-отводного КИХ-фильтра и 7-отводного и 5-отводного медианных фильтров сведены в таблицу 2.
Потери в фильтрах
На фиг.30 представлен график сравнения 11-отводной КИХ-фильтрации и медианной фильтрации, проводимых на когерентном опорном сигнале. Хотя при использовании медианного фильтра и ожидаются малые потери AWGN (УБГШ) производительности, из графика, представленного на фиг.30, недвусмысленно следует наличие улучшенной реакции на скачок при коммутации антенны. Отметим, что реакция на скачок значительно улучшается, не требуя обнаружения переходного процесса. Функциональная схема новой обработки оценки опорного сигнала и шума показана на фиг.31, и здесь 11-отводный КИХ-фильтр заменен 5-отводным медианным фильтром.
Ниже приводится краткое описание функций и алгоритмов согласно фиг.31. Цель процесса (процессов), показанных на этом чертеже, заключается в обеспечении оценок комплексного коэффициента усиления (значений «а») когерентного канала наряду с оценками шума или помех. Эти оценки являются локальными во времени и по частоте (связаны с местом нахождения несущей) и предназначены для учета канала с динамическим селективным замиранием, существующим в среде подвижного объекта, такого как движущийся автомобиль. Эти оценки выводятся на основании символов опорных поднесущих, которые вырезаны из принятого и демодулированного сигнала, как описано выше, и вводятся по шине 250 как Sr,n комплексных значений. Данные, используемые для модуляции этих символов, уже известны и удалены из этих символов посредством первой операции умножения на сопряженную величину (иллюстрируемой посредством блока 252 умножения) для получения мгновенных значений а2r,n комплексного коэффициента усиления канала на шине 254. Последующая медианная временная фильтрация в фильтре 256 уменьшает шум, поддерживая при этом скачкообразные изменения благодаря коммутации антенны, чтобы получить промежуточные значения а1r,n на шине 258. Эти промежуточные значения затем подвергаются (частотной) фильтрации (сглаживанию) по опорным поднесущим, как показано в блоке 260, чтобы получить окончательные значения аr,n комплексного коэффициента усиления канала. Эти значения аr,n коэффициента усиления впоследствии используются вне этого алгоритма для обработки (коррекции и предоставления информации о метриках переходов) применительно к совокупностям сигналов для символов, несущих данные, обычным образом при модуляции символов методом квадратурной амплитудной модуляции (КАМ (QAM)).
Следующим этапом в этом процессе является оценивание шума, связанного с каждым из этих значений комплексного коэффициента усиления канала. Мгновенные выборки шума оценивают, вычитая значения аr,n-2 из (надлежащим образом задержанных) зашумленных соответствующих входных выборок а2r,n-2, что иллюстрируется в точке 262 суммирования. Как показано в блоке 264, исходя из этих комплексных выборок шума, вычисляют возведенные в квадрат значения, чтобы получить мгновенные оценки «диспn-2» дисперсии шума на шине 266. Эти мгновенные выборки дисперсии шума являются плохими оценками локального (временного и частотного) шума и требуют обработки и фильтрации для получения полезных оценок дисперсии шума. Хотя обычно можно использовать более простую временную и частотную фильтрацию, чтобы уменьшить ошибку этих мгновенных оценок дисперсии шума, фильтрация этого типа оказалась бы неэффективно учитывающей изменяющийся шум из-за замирания, действие АРУ и скачкообразные изменения вследствие коммутации антенны. Поэтому при временной фильтрации этих мгновенных выборок дисперсии используют медианный фильтр 268, чтобы получить выборки varfltn-16 (дисп-фильтрn-16), а обычную фильтрацию (посредством линейного БИХ- или КИХ-фильтра 270) используют для дополнительного сглаживания по частоте (по поднесущим), чтобы получить окончательные оценки σ2 r,n-16 путем, аналогичным вышеописанному пути получения оценок комплексного коэффициента усиления канала. Для улавливания относительно больших импульсов шума, которые возникают из-за коммутации антенны, предусмотрен дополнительный тракт 272 прямой передачи. Когда эти значения (масштабированные путем умножения на коэффициент 0,5, как показано в блоке 274) превышают оценку, полученную путем медианной фильтрации, эти превышающие значения выбираются для выдачи в фильтр сглаживания по частоте посредством функции выбора максимума, иллюстрируемой в блоке 276. Потом эти значения сглаживаются по опорным поднесущим, как показано в блоке 278. Это будет важно при последующем формировании метрик переходов, которое предусматривает использование этого знания больших импульсов шума.
Только что описанные анализы и моделирование усовершенствований алгоритмов, вносимых в когерентную оценку опорного сигнала, очевидно, работают достаточно хорошо во всех проанализированных и смоделированных случаях. Эти случаи включают в себя канал с плавным и избирательным замиранием и с шириной полосы доплеровских частот, соответствующей скоростям, характерным для автострад, и такому незначительному шуму, как соответствующий ОСШ 0 дБ. Вместе с тем, следует рассмотреть и другие условия в канале, такие как импульсный шум или остаточные эффекты переходных процессов, не полностью подавляемые новой когерентной обработкой опорного сигнала. В этом случае подходящими оказываются регулируемые значения х когерентного опорного сигнала; однако оценка дисперсии шума может оказаться искаженной. В случае символа (символов), в которых импульс искажен, импульс шума может быть высоким, но БИХ-фильтр мог бы подавить это значение оценки шума в момент появления импульса и распространить оценку шума на протяжении времени реакции БИХ-фильтра на импульсное возмущение. В этом случае было бы предпочтительно осуществлять прямую передачу выборок сильного шума параллельно тракту БИХ-фильтрации (с подходящим согласованием задержек). Для символов, в которых импульс шума значительно больше, чем выходной сигнал БИХ-фильтра, этот импульс шума нужно использовать для определения оценочной дисперсии шума для этих символов. Когда используют тракт прямой передачи для этих импульсов шума, энергию, поступающую в БИХ-фильтр для этих выборок, следует уменьшать так, чтобы локальный пик шума не распространялся по диапазону БИХ-фильтра. Легко предусмотреть несколько вариаций этого процесса для обработки пиков шума в оценке дисперсии шума.
Процесс оценки дисперсии шума модифицируют для улучшения рабочих характеристик с использованием процессов коммутации и для согласования с более быстрой АРУ. Исходная оценка шума использовала 2-х полюсный БИХ-фильтр с параметром а=1/16 (не путать с описанными обозначениями «аr,n» значений для комплексных коэффициентов усиления каналов). Пик импульсной характеристики этого фильтра имел место при задержке на 8 выборок (символов), хотя затухающий «хвост» был гораздо длиннее, делая задержку скачка ближе к 16-ти выборкам (символам). Фиг.32 показывает, что новая модификация изменяет параметр «а» БИХ-фильтра, вследствие чего а=1/8. Другие модификации, вносимые в оценку шума, включают в себя изменение места проведения частотной фильтрации, т.е. проведение ее не перед БИХ-фильтром, а после БИХ-фильтра. БИХ-фильтру также предшествует 7-отводный медианный фильтр, и предусматривается избыточный тракт прямой передачи шума. Оба эти нововведения предназначены для лучшего согласования с переходными процессами коммутации и импульсообразным шумом, при одновременном согласовании с более быстрой функцией АРУ во входном каскаде или ПЧ-секции приемника.
7-отводный медианный фильтр используется для предварительной обработки выборок эффективного шума до линейной БИХ-фильтрации и для частотной фильтрации (опорных поднесущих). В этом случае медианный фильтр вырабатывает смещенную оценку дисперсии из-за свойства асимметричной функции плотности вероятности (фпв) возведенных в квадрат выборок шума. Это смещение можно регулировать для последующей работы в процессе оценки шума. В частности, каждая входная выборка х, поступающая в медианный фильтр, предполагается состоящей из суммы пары (комплексной) квадратов выборок гауссова шума с нулевым средним, где х=v2+w2. Гауссовы фпв выборок шума u и v имеют вид:

Куммулятивную функцию распределения от х можно найти, изменяя переменные и проводя интегрирование следующим образом:

Затем находят функцию плотности вероятности (фпв) от х, дифференцируя Р(х).

Дисперсию шума определяют как среднее значение величины х.
Медианное значение величины х можно найти, решая следующее уравнение относительно medx (медианного значения х):
Коэффициент смещения оценки медианы находят как отношение медианного значения к среднему значению.

Следовательно, медианное значение обуславливает занижение оценки дисперсии гауссова шума с коэффициентом ln(2). Это смещение следует учитывать, когда его используют для замены оценки по среднему значению в процессе оценки дисперсии шума.
Масштабирование оценки шума из-за коэффициента смещения медианного значения обычно не должно иметь значение, если оценки шума для всех символов, представляемые в декодер Витерби, масштабированы с тем же самым коэффициентом. Кроме того, может иметь эффект также нелинейность при формировании метрик переходов (например, в случае фиксированной точки квантования и переполнения).
Далее рассматриваются влияния уменьшения постоянной времени БИХ-фильтра в процессе оценки дисперсии. Каждая выходная выборка yn двухполюсного БИХ-фильтра является функцией новой входной выборки xn и двух предыдущих выходных выборок.
yn=a2·xn+2·(1-a)·yn-1-(1-a)2·yn-2.
Выражение фильтра имеет коэффициент усиления по постоянному току, равный единице, а его импульсная характеристика (во времени) зависит от параметра «а». Пик импульсной характеристики (моды) возникает на половине времени групповой задержки, при этом групповая задержка более показательна для времени реакции на скачок. Задержки среднего значения и моды можно вычислить как функцию параметра «а». Импульсная характеристика и реакция на скачок БИХ-фильтра для а=1/16 и а=1/8 показана на фиг.32 и 33. На фиг.32 представлен график импульсной характеристики БИХ-фильтра. На фиг.33 представлен график реакции на скачок БИХ-фильтра.
Действующая задержка фильтра должна быть равна, по меньшей мере, задержке моды, но меньше, чем групповая задержка. Эту задержку следует надлежащим образом компенсировать, когда применяют оценки шума при формировании метрик переходов ветвления.
групповая_задержка=средняя_задержка=2·(1/а-1),
задержка_моды=1/а-1.
Способность к подавлению гауссова шума можно оценить таким же образом, как в случае БИХ-фильтра, где уменьшение дисперсии оценки шума от входа к выходу равно сумме квадратов нормализованных коэффициентов фильтра (коэффициент усиления по постоянному току равен 1). Отметим, что это уменьшение дисперсии связано с дисперсией ошибки оценки дисперсии шума, а не с уменьшением дисперсии мощности шума. Для БИХ-фильтра это вычисление удобнее проводить на z-преобразовании импульсной характеристики фильтра, принимая для больших N предел, служащий приближением непрерывного спектра, с последующим применением теоремы Парсеваля. При этом z-преобразование для БИХ-фильтра имеет вид:

а его модуль имеет вид:

Коэффициент уменьшения дисперсии от входных к выходным выборкам можно вычислить следующим образом:

Переходя к пределу, можно проинтегрировать сумму следующим образом:

Затем находят коэффициент уменьшения дисперсии как функцию параметра «а» после интегрирования

Уменьшение дисперсии, достигаемое БИХ-фильтром, при УБГШ построено в виде зависимости от параметра «а» на фиг.34. На фиг.34 представлен график уменьшения ошибки в оценке шума как функции параметра «а» БИХ-фильтра.
Фильтрация по частоте обеспечивает еще 7 дБ уменьшения шума при УБГШ. В стационарном канале УБГШ увеличенная постоянная времени БИХ-фильтра была бы выгодна для уменьшения ошибки оценки шума; однако в нестационарном канале с переходными процессами коммутации и/или с более быстрой АРУ оказалось бы предпочтительным уменьшенная постоянная времени. Для рассматриваемой системы, 7-отводный медианный фильтр с последующим БИХ-фильтром, имеющим а=1/8, предпочтительнее исходной конструкции с одним лишь БИХ-фильтром, имеющим а=1/16. Эта новая фильтрация приводит к минимальному ухудшению в стационарном канале УБГШ, обеспечивая при этом значительно улучшенные рабочие характеристики при замирании с быстрой АРУ и в процессах коммутации разнесения антенны. Тогда результирующая ошибка оценки шума, обусловленная только БИХ-фильтром и частотным фильтром приблизительно на 22 дБ лучше, чем дисперсия в случае подачи в фильтр единственного входного сигнала выборок шума. Это приводит к ошибке оценки дисперсии шума, имеющей составляющее примерно 8% стандартное отклонение дисперсии шума на входе фильтра, или, что эквивалентно, усредненной по 150 выборкам шума. Это может иметь влияние, аналогичное ухудшению метрик переходов, используемых декодером Витерби, приблизительно на 0,33 дБ в УБГШ. Каскадированный 7-отводный медианный фильтр уменьшает эту ошибку еще больше, хотя его влияние в УБГШ вычислить непросто. Это уменьшение сравнимо с ухудшением приблизительно на 0,16 дБ в исходном модеме, где используется а=1/16. Вместе с тем, существует мотивация к созданию новой оценки шума для условий, в которых шум отличен от УБГШ.
В канале, где есть только УБГШ, оптимальный приемник может не выбрать избыточный тракт прямой передачи шума, и оптимальный фильтр шума может не быть линейным (например, БИХ- или КИХ-фильтром), а его работа может занимать длительный период времени. Избыточный тракт шума обеспечивается только для обработки импульсообразного шума или ошибок когерентного опорного сигнала из-за переходных процессов коммутации и т.д. В этих случаях избыточный тракт шума смягчает случайные влияния посылок большого шума, не портя более долговременные оценки дисперсии, обеспечиваемые БИХ-фильтром. Избыточный тракт прямой передачи шума масштабируется с коэффициентом G∗ln(2), а доля входных выборок шума в тракте оценки шума может превышать среднее значение и может быть выбрана посредством функции «Выбор максимального входного сигнала». Если масштабирование мало, то избыточный тракт шума может выбираться не так часто, а потери в случае УБГШ можно минимизировать. Вероятность того, что выбирается избыточный тракт, приблизительно равна вероятности того, что избыточные выборки превышают среднее значение (в предположении фильтра, работающего точно по среднему значению).

Усредненный коэффициент увеличения в дисперсии оценки шума (в дБ) из-за выбора избыточного тракта можно вычислить следующим образом:
На фиг.35 представлен график, иллюстрирующий влияния избыточного значения G∗ln(2) коэффициента усиления на вероятность выбора избыточного тракта и на увеличенную среднюю оценочную дисперсию шума. Значение G∗ln(2)=0,5 было эмпирически определено как резонное компромиссное значение для избыточного коэффициента усиления шума. Это значение дает минимальные потери в случае УБГШ, но является эффективным при минимизации потерь из-за переходных процессов коммутации. Кроме того, улучшаются рабочие характеристики при наличии быстрой АРУ и/или первой соседней ЧМ-помехи.
Влияния изменений как остаточных ошибок когерентной оценки, так и оценок дисперсии шума показаны на фиг.36-40. На фиг.36 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) при оценке исходного 11-отводного КИХ-фильтра и исходного БИХ-фильтра с а=1/16. На фиг.37 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) при оценке исходного 11-отводного КИХ-фильтра и БИХ-фильтра с изменением, согласно которому а=1/8. На фиг.38 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) при наличии исходного 11-отводного КИХ-фильтра, когда накладывается изменение дисперсии шума. На фиг.39 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) при оценке 5-отводного медианного фильтра и БИХ-фильтра с изменением, согласно которому а=1/8. На фиг.40 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 10 дБ) при наличии 5-отводного медианного фильтра, когда накладывается изменение дисперсии шума.
Для получения графиков согласно фиг.37-40 вносятся различные компоненты изменений, причем фиг.40 - конечный результат всех изменений. На фиг.36 показаны рабочие характеристики исходного модема в терминах ошибок когерентной оценки опорного сигнала и шума. На этом чертеже показано относительно большое значение шума переходного процесса при коммутации, которое не улавливается в оценке шума. Пики шума занижаются при оценке, а оценки в окрестности пиков завышаются из-за сглаживания БИХ-фильтром.
На фиг.37 показано небольшое улучшение, достигаемое путем уменьшения постоянной времени БИХ-фильтра. На фиг.38 показано значительное улучшение в оценке шума, хотя реальный шум переходных процессов остается большим. На фиг.39 показано значительное улучшение в переходных процессах шума когерентного опорного сигнала за счет использования 5-отводного медианного фильтра, хотя оценка шума не захватывает пики переходных процессов.
На фиг.40 показаны все улучшения, являющиеся результатами уменьшения шума когерентного опорного сигнала, при этом оценка шума улавливает малые длительности переходных процессов. Хотя оценки дисперсии шума на графике могут показаться несколько зашумленными, этот выбор параметров дал наилучший компромисс рабочих характеристик по области сценариев испытаний.
Это изобретение обеспечивает согласование переходных процессов коммутации, с которыми приходится сталкиваться антенной ЧМ-системе с коммутационным разнесением, предназначенной для режима гибридных ЧМ-сигналов системы HD
RadioTM. Эти улучшения влекут за собой изменение когерентного слежения и алгоритмов оценки дисперсии шума. Новые алгоритмы были проанализированы и смоделированы при плавном и избирательном замирании на скоростях, типичных для автострад, и рэлеевском замирании. Моделирование показывает хорошие рабочие характеристики когерентного слежения и приемлемую оценку шума. Упомянутые улучшения дали значительно лучшие рабочие характеристики при быстрой АРУ, коммутации разнесения антенны, первой соседней ЧМ-помехе и в экстремальных выбираемых средах замирания.
Проведены лабораторные испытания новых программных средств приемника опорного сигнала (модифицированных для управления коммутацией разнесения антенны). Окончательный вариант представляется обеспечивающим приемлемые рабочие коэффициенты усиления в некоторых ключевых средах замирания и помех. Фиг.41 количественно указывает рабочие характеристики при замирании на собственной частоте колебаний (СЧК), а фиг.42 демонстрирует рабочие характеристики при замирании на ультразвуковых частотах (УЗЧ).
На фиг.43 представлена блок-схема приемника 314, выполненного с возможностью проведения обработки сигналов в соответствии с этим изобретением. Сигнал HD
RadioTM принимается на антенне 316. Полосовой фильтр 318 предварительного выбора пропускает интересующую полосу частот, включая желательный сигнал на частоте fн, но подавляет сигнал изображения на частоте (fн-2fпч) (для гетеродина с внешней синхронизацией для нижней боковой полосы). Малошумяший усилитель 320 усиливает сигнал. Усиленный сигнал смешивается в смесителе 322 с сигналом fг местного гетеродина, подаваемым по шине 324 перенастраиваемым местным гетеродином 326. Это приводит к созданию сигналов (fн+fг) суммы и (fн-fг) разности на шине 328. Фильтр 330 промежуточной частоты пропускает сигнал fпч промежуточной частоты и ослабляет частоты вне ширины полосы интересующего модулированного сигнала. Аналого-цифровой преобразователь 332 работает, используя синхросигнал fсинх для получения цифровых выборок на шине 344 с частотой fвыб. Цифровой преобразователь 336 с понижением частоты сдвигает частоту, фильтрует и децимирует сигнал для получения синфазного и квадратурного сигналов меньшей частоты выборок на шинах 338 и 340. Затем цифровой процессор 342 сигналов обеспечивает дополнительную обработку сигналов, включая вышеописанное когерентное слежение, для получения выходного сигнала на шине 344 для устройства 346 вывода.
Альтернативный метод оценки как опорного сигнала фазы, так и ИоСК, исходя из опорных поднесущих, проиллюстрирован на фиг.44. Как показано на фиг.44, комплексные «обучающие» символы, переносимые опорными поднесущими, вводятся по шине 348, и берется комплексно-сопряженная величина этих символов, как показано в блоке 350. Эта комплексно-сопряженная величина умножается на известную «обучающую» последовательность, подаваемую по шине 352, блоком 354 умножения. Это обеспечивает удаление модуляции двоичной (±1) тактирующей последовательности из принимаемых «обучающих» поднесущих путем умножения их на синхронизированную, декодированную и дифференциально-перекодированную тактирующую ДФМн-последовательность. Результирующие символы, подаваемые по шине 356, обрабатываются фильтром 358 с конечной импульсной характеристикой (КИХ-фильтром), чтобы сгладить результирующие символы во времени, что дает комплексно-сопряженную оценку локальной фазы и амплитуды на шине 360. Это значение задерживается блоком 362 временной задержки и умножается на оценку величины, обратной дисперсии шума и подаваемой по шине 364, блоком 366 умножения. Дисперсия шума оценивается путем вычитания сглаженной оценки локальной фазы и амплитуды, подаваемых по шине 360, основанной на входных символах (после подходящего выравнивания во времени, обеспечиваемого блоком 368 задержки), в точке 370 суммирования. Затем результат возводится в квадрат, как показано в блоке 374. Обратная величина аппроксимируется (с защитой от деления на нуль), как показано в блоке 376. Этот вес ИоСК интерполируется по 18-ти поднесущим между парами соседних «обучающих» поднесущих, как показано блоком 378, для получения результирующих локальных весов ИоСК на шине 380. Эти веса ИоСК затем используются для умножения на соответствующие символы, несущие данные и принимаемые по шине 382, после чего они задерживаются надлежащим образом, как показано в блоке 384. Затем блок 386 умножения формирует мягкое решение, выводимое по шине 388.
На фиг.44 шины, по которым передаются «обучающие» символы, имеют обозначение ОБУЧ, а шины, по которым передаются данные, имеют обозначение Д. Кроме того, фильтр 374 предусматривает такую задержку:
задержка ≥ 1/β, где β=1/16,
и тогда
yn,m=2·(1-β)·yn-1,m-(1-β)2·yn-2,m+β2·xn,m.
Эти выражения относятся к двухполюсному БИХ-фильтру, имеющему постоянную β времени. БИХ-фильтр вычисляет сглаженные выходные выборки «y», исходя из входной выборки «х» и предыдущих выходных выборок.
Получение веса ИоСК объединяет взвешивание амплитуд для суммирования максимальных отношений (СМО) с коррекцией фазы для устранения фазовых ошибок канала. Этот вес ИоСК является динамическим во времени и по частоте и оценивается для каждого ЧФМн-символа.
где  - оценка комплексной сопряженной величины коэффициента усиления канала, и σ2 - оценка дисперсии шума.
- оценка комплексной сопряженной величины коэффициента усиления канала, и σ2 - оценка дисперсии шума.
Работа по методу восстановления ИоСК согласно фиг.44 предполагает захват частоты поднесущих и слежение за ней, а также тактирование символов применительно к МОРЧ-символам. Методы захвата частоты и тактирования символов предусматривают использование свойств циклического префикса. Слежение за частотой и символами достигается посредством наблюдения за дрейфом фазы от символа к символу в зависимости от времени или частоты (по поднесущим).
После захвата и частоты, и тактирования символов предпринимается попытка синхронизации с комбинацией синхронизации блоков тактирующей ДФМн-последовательности путем перекрестной корреляции дифференциально-обнаруженной ДФМн-последовательности с комбинацией синхронизации блоков. Дифференциальное обнаружение проводят по всем поднесущим в предположении, что место нахождения «обучающих» поднесущих сначала неизвестно. Осуществляют перекрестную корреляцию известной комбинации синхронизации блоков с обнаруженными двоичными разрядами каждой поднесущей. Корреляцию поднесущих объявляют при обнаружении совпадения всех 11-ти двоичных разрядов комбинации синхронизации блоков. Синхронизация блоков (и разрешение проблемы неоднозначности поднесущих) устанавливается, когда количество корреляций поднесущих совпадает с пороговыми критериями или превышает их (например, 4 корреляции поднесущих, разнесенные на несколько поднесущих, количество которых кратно 19 поднесущим).
После установления синхронизации блоков можно декодировать изменяющиеся поля тактирующей ДФМн-последовательности. Дифференциально-обнаружимые двоичные разряды этих изменяющихся полей обнаруживаются на основе «решения большинством голосов» по «обучающим» поднесущим, так что декодирование оказывается возможным, когда некоторые из этих поднесущих или двоичных разрядов искажены. 16-ти блокам в пределах каждого кадра модема дают номера от 0 до 15. Тогда содержание самого старшего двоичного разряда (ССДР) поля «подсчет блоков» всегда задают нулевым, поскольку подсчет блоков никогда не превышает 15. Синхронизация кадров модема устанавливается в соответствии со знанием поля «подсчет блоков».
Когерентное обнаружение этого сигнала требует некоторого когерентного опорного сигнала фазы. Декодированная информация из тактирующей ДФМн-последовательности используется для удаления модуляции из «обучающих» поднесущих с оставлением информации об опорном сигнале локальной фазы и шуме. Обращаясь к фиг.44, отмечаем, что сначала из принимаемых «обучающих» поднесущих удаляют модуляцию двоичной (±1) тактирующей последовательности, умножая упомянутые поднесущие на синхронизированную, декодированную и дифференциально-перекодированную тактирующую ДФМн-последовательность. Для сглаживания результирующих символов во времени используют КИХ-фильтр, что дает комплексно-сопряженную оценку локальной фазы и амплитуды. Это значение задерживается и умножается на оценку величины, обратной дисперсии шума. Дисперсию шума оценивают, вычитая сглаженную оценку локальной фазы и амплитуды из входных символов (после надлежащего выравнивания во времени), возведения в квадрат и фильтрации комплексных выборок шума с последующей аппроксимацией упомянутой обратной величины (с защитой от деления на нуль). Этот вес ИоСК интерполируют по 18-ти поднесущим между парами соседних «обучающих» поднесущих. Результирующие локальные веса ИоСК затем используют для умножения на соответствующие локальные символы, несущие данные.
В одном варианте осуществления фильтр 358 нижних частот, показанный на фиг.44, является 11-отводным КИХ-фильтром. Этот 11-отводный КИХ-фильтр используют для динамической оценки комплексного когерентного опорного коэффициента усиления α в каждом местоположении поднесущей для каждого времени символа. Временная фильтрация с помощью 11-отводного КИХ фильтра и последующая фильтрация по поднесущим проводится для вычисления локальной оценки когерентного опорного коэффициента усиления α для каждого расположения ЧФМн-символа как во времени, так и по частоте. Больший КИХ-фильтр, имеющий больше отводов, мог бы снизить ошибку оценки, когда статистики сигналов стационарны, но ширина полосы при этом оказалась бы слишком малой для слежения за носящими доплеровский характер изменениями в сигнале на максимальных скоростях, характерных для автострад. Следовательно, предпочтительны 11-отводные фильтры с клинообразной симметричной гауссообразной импульсной характеристикой. Вместо БИХ-фильтра используют симметричный КИХ-фильтр ввиду его свойства линейности фазы, которое дает нулевую ошибку смещения для (приблизительно) кусочно-линейной характеристики замирания в канале в диапазоне частот фильтра. Этот сглаженный когерентный опорный сигнал, выдаваемый из КИХ-фильтра, вычитается из задержанных входных выборок, что дает мгновенные выборки шума. Эти выборки шума возводятся в квадрат и обрабатываются БИХ-фильтром 374, что дает оценку дисперсии шума, σ2. Этот фильтр имеет ширину полосы, более узкую, чем КИХ-фильтр, что позволяет получить в целом более точную оценку дисперсии шума. После надлежащих задержек выборок для согласования с задержками фильтра вычисляют вес α∗/σ2 для каждой поднесущей. Эти значения сглаживают и интерполируют по поднесущим для каждого МОРЧ-символа, чтобы получить более точные оценки. Этот вес является особым для каждого МОРЧ-символа, а каждая поднесущая обеспечивает локальную (временную и частотную) оценку и вес для символов, образующих метрики переходов для последующего декодера Витерби.
Система, проиллюстрированная на фиг.44, была разработана для обеспечения соответствия транспортным средствам со стационарными антеннами. Описаны многочисленные функции опорных поднесущих применительно к захвату, слежению, оценке информации о состоянии канала (ИоСК) и когерентной работе. Эта система была разработана для когерентной работы в полосе ЧМ-радиовещания (88-108 МГц) при ширине полосы замирания, соответствующей транспортным средствам, движущимся со скоростями, характерными для автострад. Различные параметры когерентного слежения оцениваются с использованием фильтров, ширины полос которых приближаются к ожидаемой ширине (примерно 13 Гц) полосы доплеровских частот. При стационарной антенне соответствующие статистики слежения за входным сигналом согласно алгоритмам слежения предполагаются изменяющимися с частотой, не превышающей ширину полосы доплеровских частот.
Приемники HD RadioTM стандарта ВПР можно использовать в сочетании с антенной системой с коммутационным разнесением. Вместе с тем, использование антенн с коммутационным разнесением вносит резкие переходные процессы в когерентное слежение за цифровым сигналом, что ухудшает цифровые рабочие характеристики.
В том смысле, в каком он употребляется в данном описании, термин «комплексный когерентный опорный коэффициент усиления (α)" для ЧФМн-символа (в зависимости от места нахождения во времени и по частоте, поскольку он является динамическим) определяется как α. Это комплексный член, включающий в себя действительную и мнимую составляющие, который отображает коэффициент усиления и фазу символа, связанного с ним. Это значение оценивают путем вышеописанной обработки и фильтрации. Термин «составной опорный сигнал xn когерентного канала» относится к значению α составного сигнала по всем опорным поднесущим и за любое время одного МОРЧ-символа.
В этом примере предполагается, что время коммутации, характерное для модуля коммутации разнесения, составляет порядка 10 микросекунд, а минимальное время задержки срабатывания составляет порядка 10 миллисекунд. Время коммутации порядка 10 микросекунд не оказывает заметного влияния на демодулированный ЧМ-сигнал, а общее улучшение разнесения при частотной модуляции может оказаться существенным, поскольку предотвращаются замирания сигналов. Вместе с тем, переходный процесс коммутации негативно влияет на когерентно отслеживаемый цифровой сигнал. Как показано на фиг.23, коммутация антенного модуля обуславливает скачкообразный переходный процесс в когерентном сигнале, причем сам сигнал непосредственно перед переходным процессом или после него является приблизительно когерентным. Фильтрация с конечной импульсной характеристикой (КИХ-фильтрация) скачкообразного переходного процесса искажает оценочный опорный сигнал α когерентного канала (как показано на фиг.44), влияя на диапазон выборок, равный длине КИХ-фильтра (11 отводов). Это искажение в опорном сигнале когерентного канала увеличивает модуль выборок шума в результате вычитания этого опорного сигнала из входных выборок. Хотя шум увеличивается лишь в окрестности переходного процесса, БИХ-фильтр расширяет этот пик шума на диапазон БИХ-фильтра. Это дает эффект занижения дисперсии шума при оценке в ближайшей окрестности переходного процесса, тогда как завышение при оценке во временном диапазоне БИХ-фильтра в ближайшей окрестности переходного процесса не происходит. Как искаженный опорный сигнал когерентного канала, так и ошибки дисперсии шума вносят вклад в ухудшение цифрового сигнала. В изобретении предложен способ когерентного слежения, который компенсирует переходные процессы коммутации в антенной системе с коммутационным разнесением.
На фиг.45 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 20 дБ). Линия 438 отображает выборку шума, вводимую в БИХ-фильтр, а линия 440 отображает отфильтрованный выходной сигнал. Видно, что входные выборки шума (возведенные в квадрат) увеличиваются в ближайшей окрестности переходного процесса. На самом деле, это происходит ввиду искажения опорного сигнала когерентного канала из-за 11-отводного КИХ-фильтра. Хотя выход БИХ-фильтра реагирует на пики шума, эти пики претерпевают локальное подавление у переходного процесса, но распространяются на протяжении БИХ-фильтра. Эти ошибки в локальной оценке дисперсии шума вносят вклад в ухудшение цифровых рабочих характеристик.
На фиг.46 представлен еще один график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 20 дБ) в случае когерентного опорного сигнала, фиксированного в соответствии с изобретением. Линия 442 отображает выборку шума, вводимую в БИХ-фильтр, а линия 444 отображает отфильтрованный выходной сигнал. Фиг.46 иллюстрирует тот же сценарий, что и фиг.45. Однако в соответствии с этим изобретением опорный сигнал когерентного канала корректируется. В КИХ-фильтрации или оценке дисперсии шума ничего не изменено.
Когерентного слежения можно достичь с любой стороны (во времени) от переходного процесса коммутации, как показано на фиг.24. На фиг.47 представлена функциональная блок-схема, иллюстрирующая генерирование когерентных опорных сигналов канала. Демодулированные комплексные символы из нескольких опорных поднесущих вводятся по шинам 450, 452 и 454. Эти комплексные символы объединяются с сопряженной величиной 456 известной опорной последовательности в смесителях 458, 460 и 462 для удаления данных из символов опорных поднесущих. КИХ-фильтры 464, 466 и 468 фильтруют каждое значение комплексного коэффициента усиления поднесущей, чтобы уменьшить шум. Эти КИХ-фильтры могут быть, например, 7-отводными фильтрами. Блок 470 показывает, что значения коэффициента усиления поднесущих сглаживаются по опорным поднесущим для дальнейшего уменьшения шума при оценке. Это приводит к опорному коэффициенту усиления когерентного канала для каждой поднесущей на шинах 472, 474 и 476. Эти коэффициенты усиления опорного сигнала когерентного канала суммируются в точке 478 суммирования, чтобы получить составной опорный сигнал хn когерентного канала на шине 480.
Фильтры когерентной оценки не могут использовать выборки сигналов, которые с двух сторон охватывают переходный процесс, поэтому следящие фильтры могут использовать только выборки сигналов вплоть до переходного процесса (не включительно) с любого направления во времени. Момент времени возникновения переходного процесса сигнала должен быть идентифицирован. Хотя (теоретически) должна существовать возможность неявного сообщения момента коммутации в модем приемника, это может оказаться практически не осуществимым. Для модема предпочтительно надежное обнаружение переходного процесса в рамках алгоритмов когерентного слежения. Алгоритмы когерентного слежения можно модифицировать в окрестности переходного процесса, чтобы обеспечить приблизительно когерентное слежение в ближайшей окрестности переходного процесса, за исключением символа, где происходил переходный процесс. Излишне говорить, что ошибка в оценке дисперсии шума возникает из-за ошибки в опорном сигнале когерентного канала. Следовательно, если опорный сигнал когерентного канала является точным, то нет нужды изменять оценку дисперсии шума.
Требуется обеспечить обнаружение «вслепую» скачкообразного переходного процесса из-за коммутации антенных элементов. Особенность, связанная с обнаружением именно «вслепую», относится к способу, при осуществлении которого алгоритм обеспечивает просмотр демодулированных символов модема и не обладает непосредственным знанием момента коммутации в модуле коммутации разнесения. Способ предусматривает обработку выборок слежения за сглаженным когерентным опорным сигналом (комплексных отфильтрованных значений α), которые обозначены буквой «х» на фиг.47 и в этом описании, на частоте следования МОРЧ-символов (т.е. приблизительно 344,5 МОРЧ-символов в секунду в одном примере). Значения α комплексного коэффициента усиления канала группируются по всем опорным поднесущим для получения одного составного комплексного значения «х» для каждого МОРЧ-символа.
Предполагается, что переходный процесс (который может длиться приблизительно 30 микросекунд) оказывается гораздо короче, чем время, занимаемое символом, и что этот переходный процесс возникает в течение лишь одного символа. Символы с любой стороны от переходного процесса не искажаются значительно этим переходным процессом и могут быть использованы при когерентном слежении и оценке. Однако символы, расстояние которых от переходного процесса находится в пределах половины диапазона КИХ-фильтра (например, 5 выборок для 11-отводного КИХ-фильтра или 3 выборки для 7-отводного КИХ-фильтра), подвергаются фильтрации для оценки когерентного опорного сигнала. Это недвусмысленно проиллюстрировано на фиг.24, где показаны действительная и мнимая составляющие комплексных значений «х» (сплошные линии на графике), причем количество отводов КИХ-фильтра было уменьшено с 11-ти до 7-ми, чтобы минимизировать диапазон эффектов переходных процессов. Уменьшение количества отводов КИХ-фильтра до 7-ми имеет эффект небольшого уменьшения коэффициента усиления фильтра на протяжении шума, но улучшает переходную характеристику.
На фиг.46 показано искажение когерентного слежения в пределах ±3 символов от переходного процесса, при котором когерентный опорный сигнал совершает переход от предпереходного значения к постпереходному значению для α. Один способ обнаружения переходного процесса предусматривает тестирование гипотез выборок «х» с любой стороны от рассматриваемого символа, где следует обнаружить переходный процесс. Иными словами, если нужно обнаружить переходный процесс в месте n нахождения символа, то мы наблюдаем выборки xn-1 и xn+1. Тестирование гипотез продолжается для каждого последующего места расположения символа, и при этом также предполагается, что наблюдения прошлой и будущей выборок относительно выборки «х» могут быть осуществлены на всем протяжении подходящей задержки в алгоритмах обработки сигналов, которые можно подрегулировать позже. Также предполагается, что переходный процесс обнаруживается, когда значения выборок xn-1 и xn+1 оказываются достаточно разными (или некогерентными). Несколько форм обнаружения этого различия проанализированы, промоделированы и сравнены в канале с замиранием. Простая разность (xn-1-xn+1) комплексных значений или модуль |xn-1-xn+1| этой разности оказываются недостаточными для локализации переходного процесса, поскольку эта разность масштабируется модулем сигнала в этот момент, а пик разности не отображается. Однако эту разность можно масштабировать обратно пропорционально ее модулю после обнаружения пика, чтобы проверить, присутствует ли переходный процесс. Хотя эффективными могут оказаться различные формы критериев обнаружения, в этом примере используются квадраты модулей вместо модуля, чтобы обойтись без вычисления квадратных корней. Следующий трехэтапный алгоритм для обнаружения расположения переходного процесса показал себя эффективным в зашумленном канале с замиранием и относительно простым применительно к расчету последовательности выборок xn.
Поскольку выражения для обнаружения пика и переходного процесса предусматривают использование будущих значений выборок «х», удобно вычислять разность «разн.квадр.» перед расчетами по двум последующим выражениям. Типичное значение «порог» составляет 0,05. Пример выходного сигнала обнаружения переходного процесса показан на фиг.48 и 49. На фиг.48 показаны результаты применения алгоритма обнаружения переходных процессов для 800 МОРЧ-символов. На фиг.49 показаны результаты применения алгоритма обнаружения переходных процессов в окрестности символа под номером 200. На этих чертежах показаны значения действительной части 484 и мнимой части 482 отфильтрованного опорного сигнала α когерентного канала и результаты обнаружения переходного процесса, демонстрирующие импульсы 486 обнаруженных переходных процессов. На фиг.49 показан в увеличенном масштабе диапазон около символа под номером 200. Отметим, что переходный процесс не был обнаружен у символа под номером 600, потому что порог нечувствителен к малым различиям во время переходного процесса, которые оказывают минимальное влияние на рабочие характеристики. Однако значение этого порога хорошо работает вплоть до ОСШ 0 дБ.
Теперь, когда можно надежно обнаружить переходный процесс, следующим этапом является регулирование выборок α когерентного опорного сигнала в ближайшей окрестности переходного процесса. Относительно простое решение заключается в том, чтобы отбросить значения выборок α вблизи переходного процесса, которые включают в себя символ, где этот переходный процесс обнаруживается. Эти значения заменяют ближайшим значением выборки α, которое не подверглось воздействию БИХ-фильтра (оно находится на расстоянии 4-х выборок от переходного процесса в случае 7-отводного БИХ-фильтра). Это дает результат, отображенный пунктирными линиями графиков на фиг.24. Пример последовательности в окрестности обнаруженного переходного процесса представлен в таблице 3. В таблице 3 показаны входные значения выборок α и выровненные выходные значения выборок α, когда переходный процесс обнаруживается в месте n нахождения символа. Входные выборки упорядочены как символы. Но выровненная выходная последовательность для выборок α регулируется для минимизации искажения, вносимого БИХ-фильтром, как описано ранее.
Коррекция комплексных коэффициентов усиления α канала (для каждой опорной поднесущей) в окрестности переходного процесса, обнаруженного в месте n нахождения символа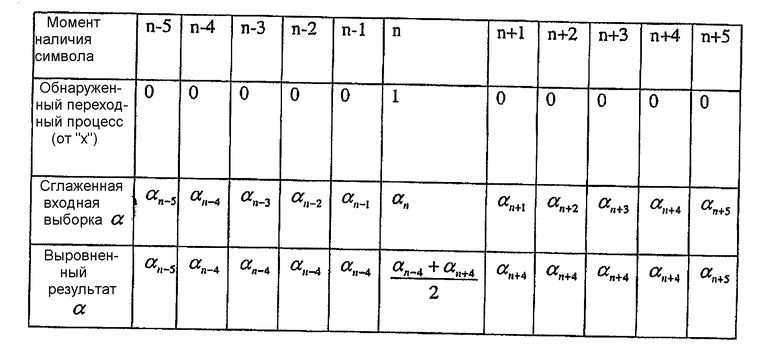
Для достижения результатов, представленных в таблице 3, можно воспользоваться простым алгоритмом с подходящей точкой и буферизацией для диапазона "х" выборок. В случае использования 7-отводного БИХ-фильтра для получения выборок α работа происходит следующим образом. Если переходный процесс обнаруживается в пределах 3-х символов до текущего символа (например, между местом n-3 и местом n-1), то вместо использования текущего значения выборки α используется значение (αn-4) выборки α, которое находится в 4-х символах перед переходным процессом. Точно так же, если переходный процесс обнаруживается в пределах 3-х символов после текущего символа (например, между местом n+1 и местом n+3), то вместо использования текущего значения выборки α используется значение (αn+4) выборки α, которое находится в 4-х символах после переходного процесса. Если текущий символ находится в месте (например, n) нахождения обнаруженного переходного процесса, то используется среднее значение - (αn-4+αn+4)/2 - выборок α, которые находятся в пределах ±4 символов с любой стороны от переходного процесса. В противном случае используются текущие входные значения выборок α (например, в местах от n-5 до n-4 и от n+4 до n+5). Конечно, подробности этого алгоритма можно подкорректировать для согласования с другим диапазоном БИХ-фильтра. Функциональная схема, иллюстрирующая коррекцию значений α в окрестности обнаруженного переходного процесса, представлена на фиг.50. На фиг.50 показано, что нескорректированный коэффициент усиления когерентного канала для каждой поднесущей вводится по шинам 500, 502 и 504. Эти входные сигналы суммируются в точке 506 суммирования, чтобы получить составной опорный сигнал когерентного канала на шине 508. Детектор 510 переходных процессов обнаруживает переходные процессы в составном опорном сигнале когерентного канала. Затем регулируют нескорректированные коэффициенты усиления когерентного канала в окрестности переходного процесса, как показано в блоке 512. Это дает откорректированный коэффициент усиления когерентного канала для каждой опорной поднесущей на шинах 514, 516 и 518.
Анализ и моделирование усовершенствований алгоритма показывают, что они работают достаточно хорошо для проанализированных и смоделированных случаев. Эти случаи включают в себя канал с плавным и избирательным замиранием и с шириной полосы доплеровских частот, соответствующей скоростям, характерным для автострад, и такому незначительному шуму, как соответствующий ОСШ 0 дБ. Вместе с тем, следует рассмотреть и другие условия в канале. Например, импульсообразный шум может обуславливать ложное обнаружение переходного процесса. В этом случае отрегулированные значения выборок «х» когерентного опорного сигнала оказываются подходящими. Однако оценка дисперсии шума будет искажена. Импульс шума может быть очень высоким для символа (символов), где этот импульс возник, но БИХ-фильтр может подавить это значение оценки шума в момент возникновения импульса и распространить оценку шума по времени реакции на импульсное возмущение БИХ-фильтра. В этом случае было бы предпочтительно осуществлять прямую передачу выборок сильного шума параллельно тракту БИХ-фильтрации (с подходящим согласованием задержек). Для символов, в которых импульс шума значительно больше, чем выходной сигнал БИХ-фильтра, этот импульс шума нужно использовать для определения оценочной дисперсии шума для этих символов. Когда используют тракт прямой передачи для этих импульсов шума, энергию, поступающую в БИХ-фильтр для этих символов, следует уменьшать так, чтобы локальный пик шума не распространялся по диапазону БИХ-фильтра. Легко предусмотреть несколько вариаций этого процесса для обработки пиков шума в оценке дисперсии шума. Одна такая модификация оценки дисперсии шума, обеспечивающая согласование импульсообразного шума, представлена на фиг.51. На фиг.51 показано, что входные сигналы для каждой опорной выборки подаются по шине 520 и прибавляются к опорной выборке α0 в сумматоре 522. Оценки дисперсии шума фильтруются по опорным поднесущим, чтобы уменьшить ошибки оценки, как показано в блоке 524. Отфильтрованные выборки дисперсии затем используются для вычисления дисперсии шума, как показано в блоке 526. Это приводит к получению дисперсии «дисп0n» на шине 528 (где дисп0n=min(2∗диспБИХn-1+ε, диспn)) и дисперсии «дисп1n» на шине 530 (где дисп1n=max(0,5∗диспn-диспБИХn-1)). Дисперсия «дисп0n» затем фильтруется в блоке 532, а «дисп1n» задерживается, как показано блоком 534. Отфильтрованная «дисп0n» и задержанная «дисп1n» суммируются в сумматоре 536, чтобы получить оценку дисперсии шума, выдаваемую по шине 538. Выходная дисперсия «диспБИХn-1» фильтра 532 подается обратно в блок 524 по шине 540.
Способ обнаружения переходного процесса, описанный для коммутации антенны, работает также в случае импульсного шума. В отличие от случая коммутации с переходным процессом, при которой значение шума переходного процесса оказывается малым, импульсный шум может быть большим. Кроме того, иногда переходный процесс коммутации оказывается необнаруженным, что вызывает ошибочное (хотя и малое) значение выборки α, но обуславливает повышенный шум в окрестности (±3 символа), имеющий влияние, аналогичное оказываемому импульсным шумом. В этих случаях импульсообразного шума фильтры оценки дисперсии шума сглаживают значение импульсного шума по многим (например, 64-м) символам, так что шум в момент импульсного шума оказывается заниженным при оценке, тогда как шум в пределах ±32 МОРЧ-символов оказывается завышенным при оценке из-за «смазывания» выборки шума. Это вызывает ухудшение качества «мягких» символов, подаваемых в декодер Витерби. Следовательно, это регулирование можно внести в оценку дисперсии шума, чтобы улучшить рабочие характеристики для этих случаев импульсообразного шума. Новая оценка дисперсии шума состоит их суммы долговременной дисперсии гауссообразного шума и кратковременной дисперсии импульсообразного шума.
Обращаясь к фиг.51, отмечаем, что значение «дисп0» - это нормальная выборка дисперсии шума, вводимая в БИХ-фильтр для последующего оценивания оценки дисперсии шума. Выборки «дисп» сортируются для представления нормальных возведенных в квадрат выборок («дисп0») гауссообразного шума и возведенных в квадрат выборок («дисп1») импульсообразного шума. БИХ-фильтр оценивает дисперсию нормального гауссова шума, тогда как тракт задержки без фильтрации обеспечивает прямую подачу выборок дисперсии импульсного шума. Когда выборки «дисп» шума оказываются в пределах целесообразного диапазона текущего выходного сигнала БИХ-фильтра, значение «дисп0» задают равным «дисп», а «дисп1»=0. Когда значение шума оказывается необычно высоким (по сравнению с текущим выходным сигналом фильтра), то это с большей вероятностью выборка импульсообразного шума, которая не должна попадать в долговременный фильтр. В этом случае значение «дисп0» ограничивают, хотя некоторые из избыточных значений помещаются в элемент «дисп1». Значение «дисп1», соответственно, задерживают для согласования с задержкой БИХ-фильтра. Результат заключается в том, что выборки импульсного шума должным образом оцениваются в надлежащий момент, и этот шум не распространяется по многим выборкам, как показано на фиг.52, что дает улучшение по сравнению с результатами, показанными на фиг.46, где импульсный шум получается вокруг символа под номером 600.
На фиг.52 представлен график, иллюстрирующий влияния переходных процессов коммутации на оценки шума (ОСШ 20 дБ), когда применяется модификация дисперсии шума. Линия 550 отображает дисперсию шума символов, тогда как линия 552 отображает отфильтрованный выходной сигнал. Отметим, что пропущенный переходный процесс у символа под номером 600 должным образом отрегулирован в соответствии с увеличенной дисперсией шума в непосредственной окрестности символа под номером 600.
В этом изобретении также предложен способ оценки дисперсии шума символов, когда этот шум может включать в себя выборки импульсообразного шума среди выборок почти гауссообразного шума. Предусматривается нелинейная фильтрация квадратов выборок ошибок, причем метод нелинейной фильтрации включает в себя этапы, на которых вычисляют квадраты выборок ошибок между значениями когерентного опорного сигнала и значениями новых символов, и используют метод нелинейной фильтрации, при котором пропускают нормальные (возведенные в квадрат) выборки гауссообразного шума через фильтр (например, КИХ- или БИХ-фильтр), чтобы оценить дисперсию гауссообразного шума, и при этом добавляют (возведенные в квадрат) выборки импульсообразного шума в выходной сигнал фильтра, чтобы получить новую дисперсию шума, отображающую сумму долговременной усредненной дисперсии гауссообразного шума и кратковременной дисперсии импульсного шума.
Способ может дополнительно включать в себя сортировку возведенных в квадрат выборок гауссообразного шума и выборок импульсообразного шума, определение того, является ли каждая новая входная (возведенная в квадрат) выборка шума импульсообразной, путем сравнения с некоторым кратным текущей усредненной оценки дисперсии шума, выдаваемой из фильтра (плюс константа для учета скачкообразных переходных процессов), и если возведенная в квадрат выборка шума не определяется как импульсообразная, то предусматривается введение этого значения в используемый фильтр для оценки долговременной дисперсии гаусобразного шума.
Это изобретение обеспечивает внесение усовершенствований в алгоритмы когерентного слежения, которые используются автономно с антенной системой с коммутационным разнесением «вслепую». Эти же самые усовершенствования могут также умерить ухудшение качества из-за импульсного шума или негауссова шума, например из-за соседнего частотно-модулированного аналогового источника помех.
Хотя изобретение описано на нескольких примерах, для специалистов в данной области техники будет очевидно, что в рамках объема притязаний изобретения, определенного в нижеследующей формуле изобретения, можно внести изменения в описанные варианты его осуществления.

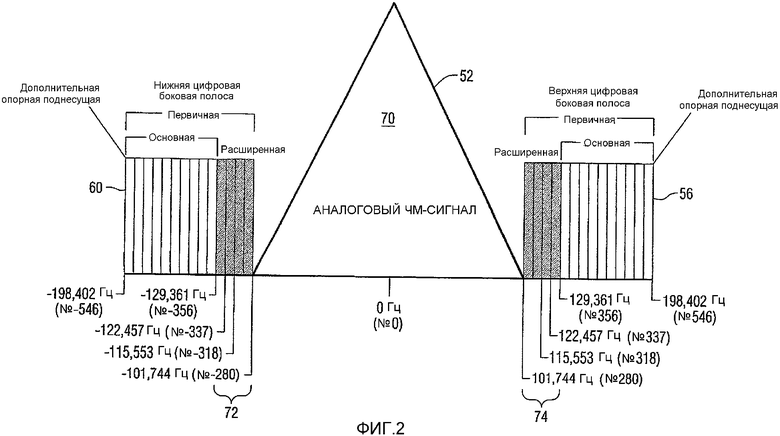
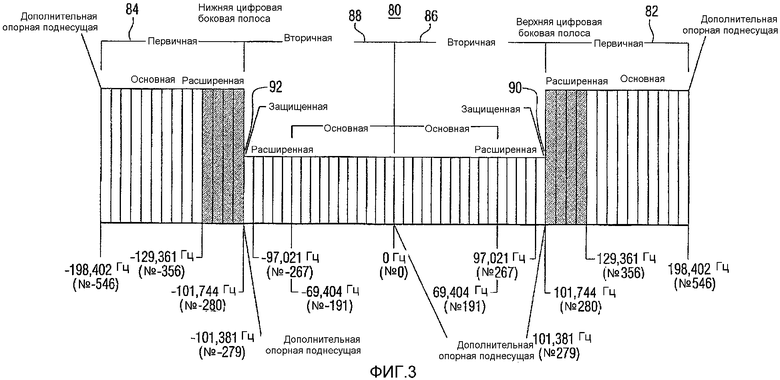
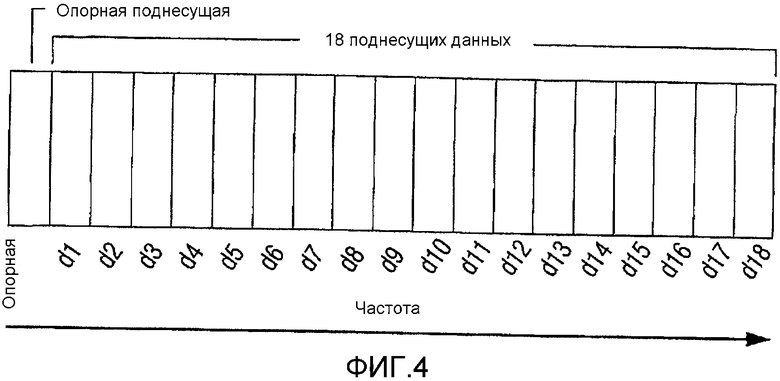
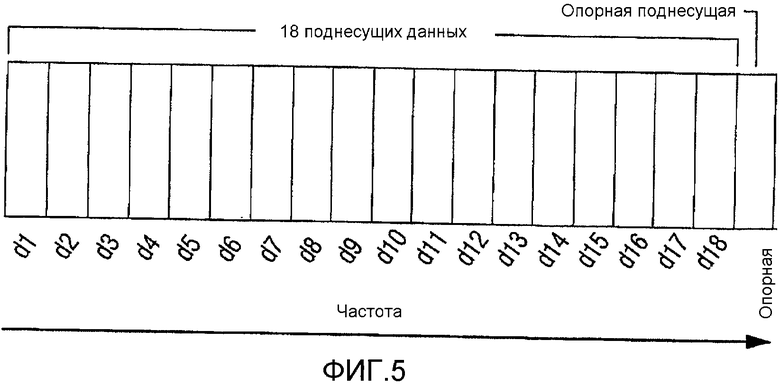
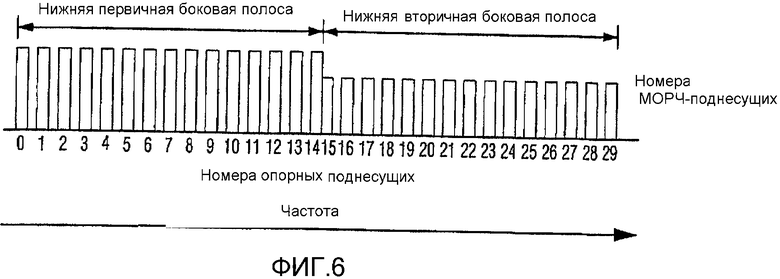
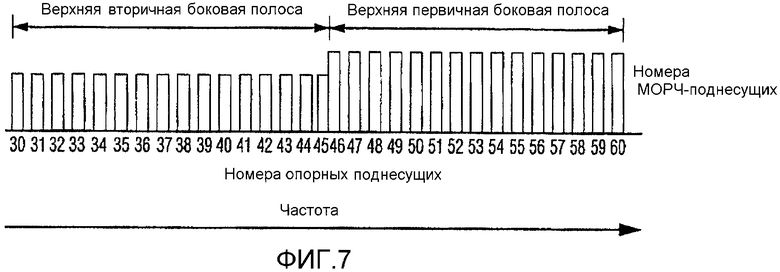
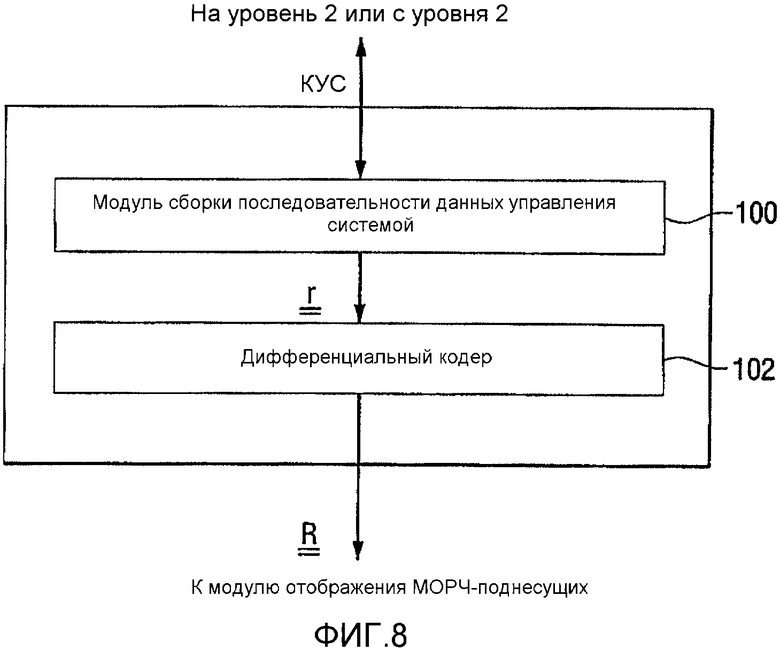
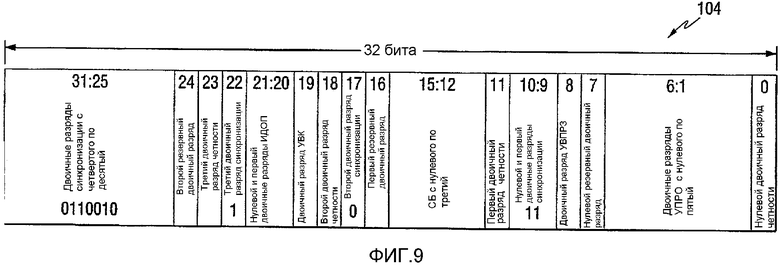
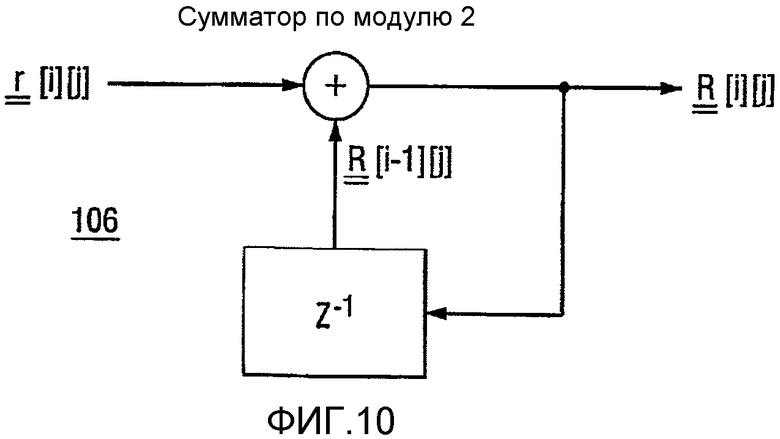
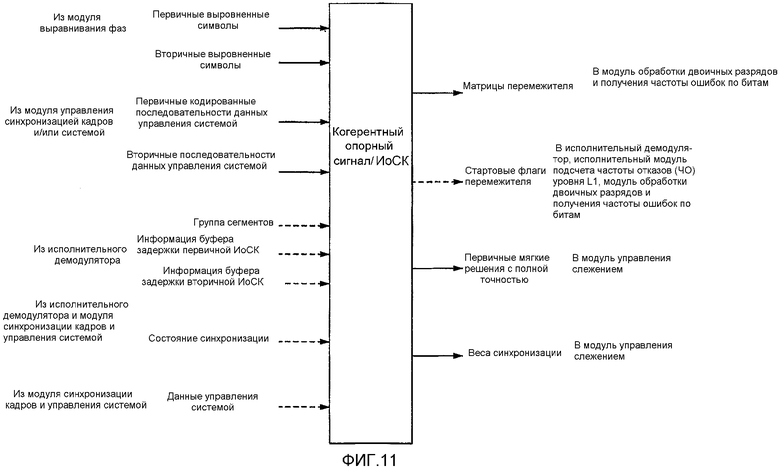
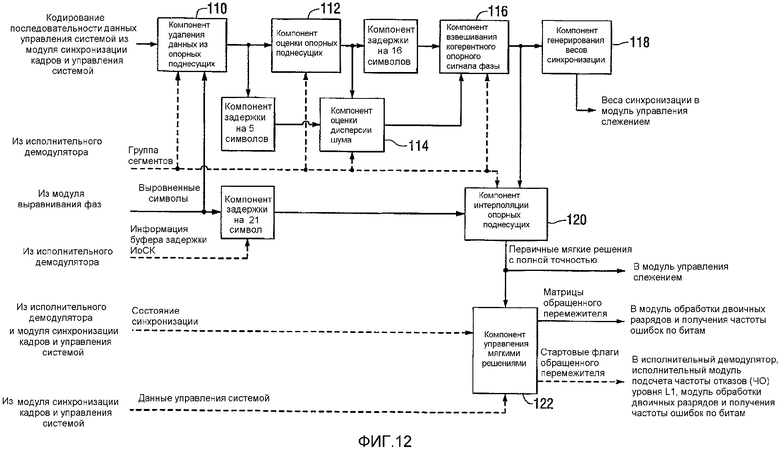
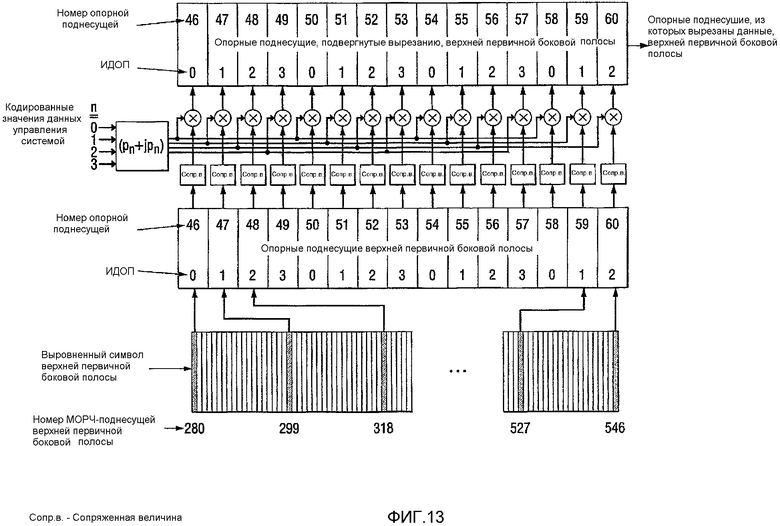

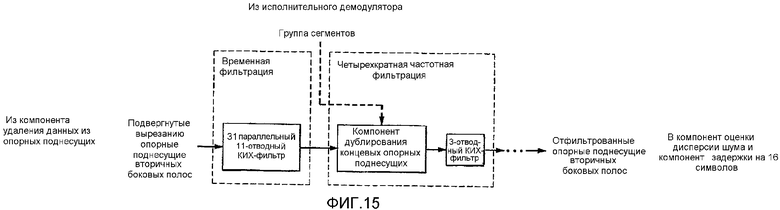
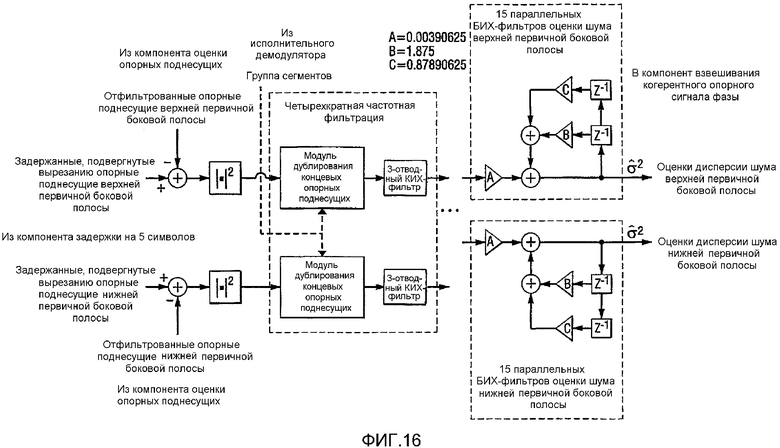
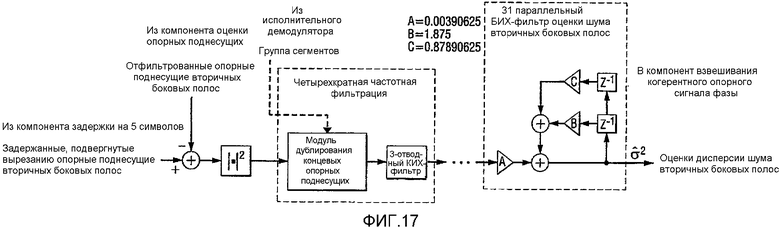
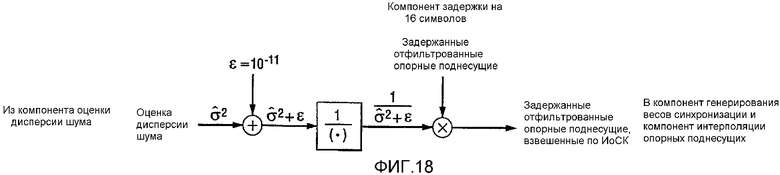
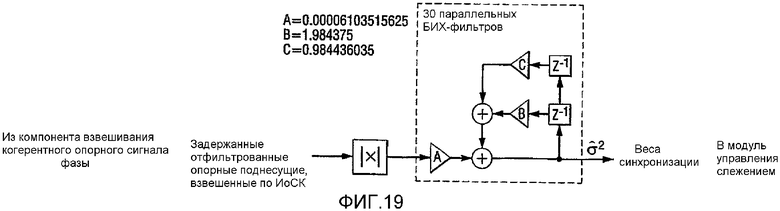
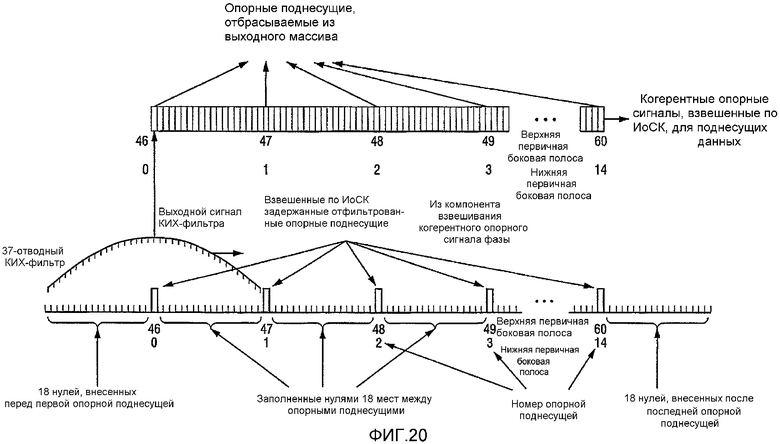
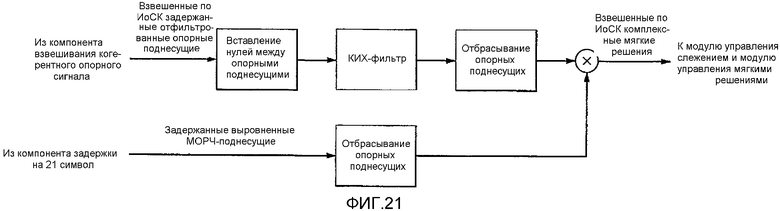
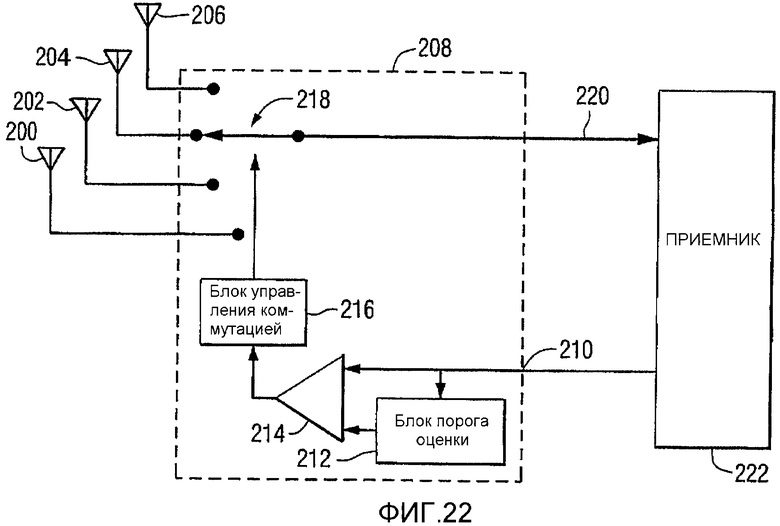

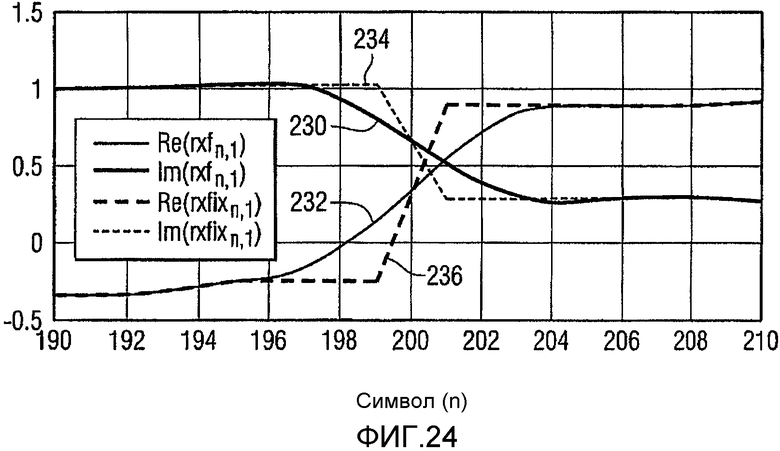
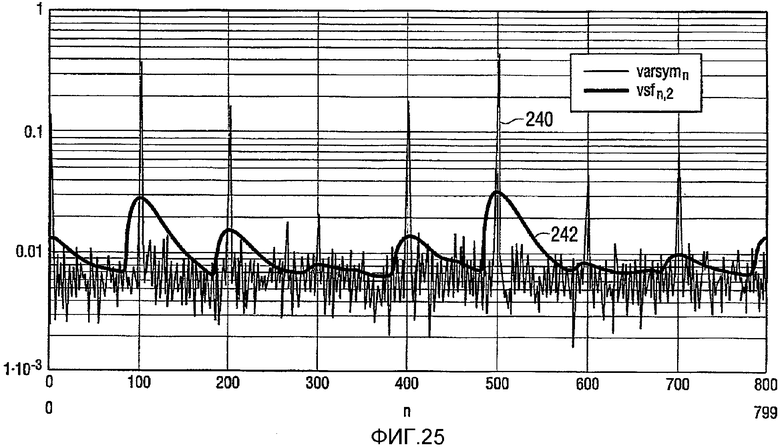
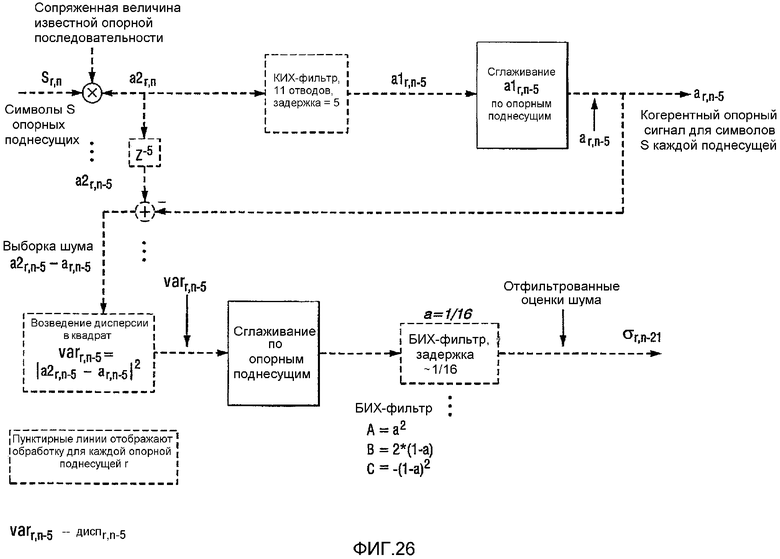
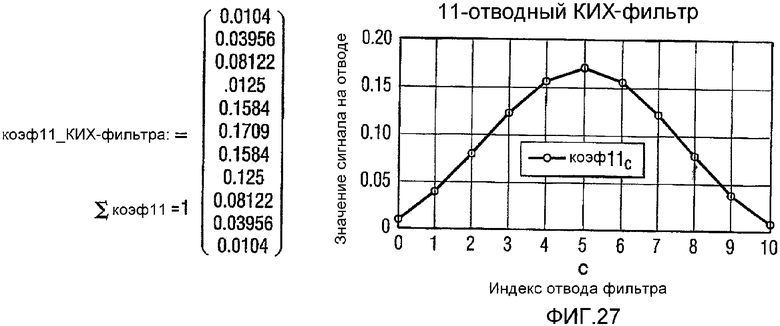
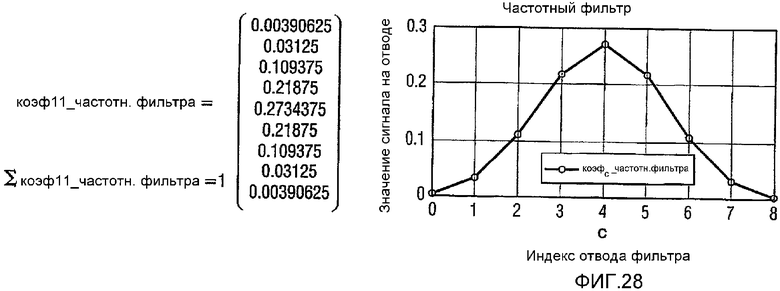
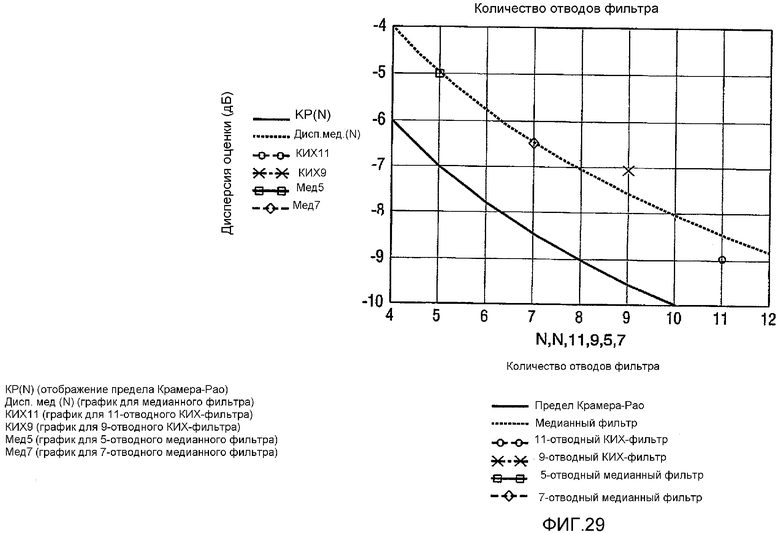

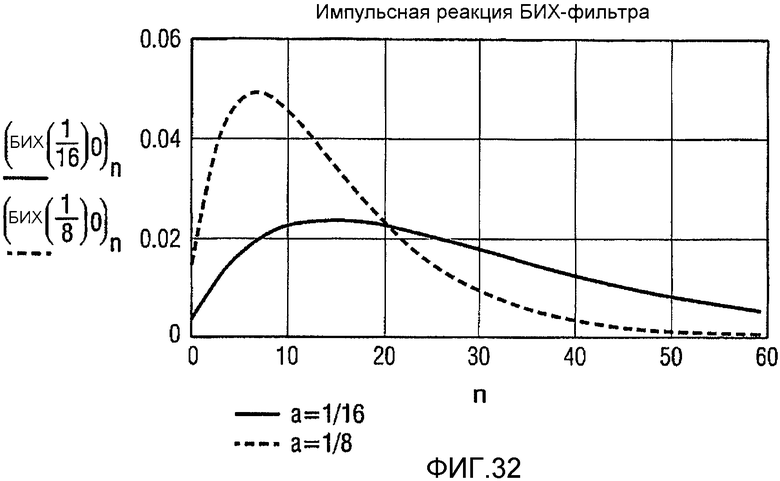

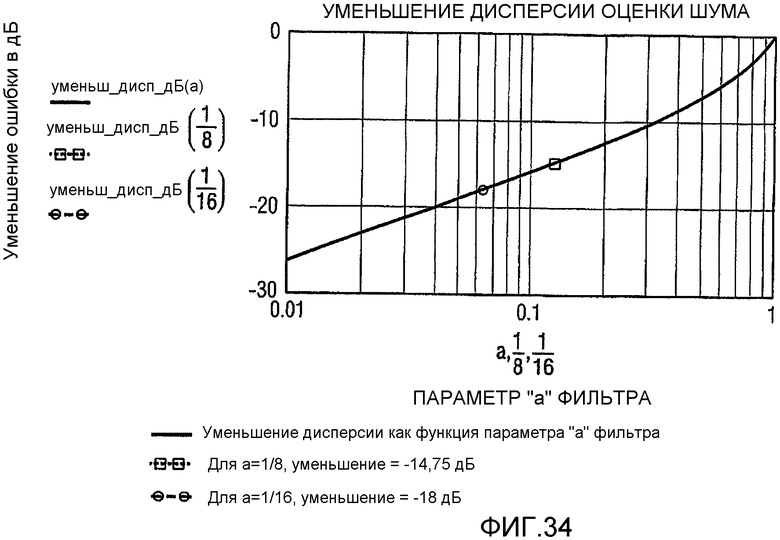
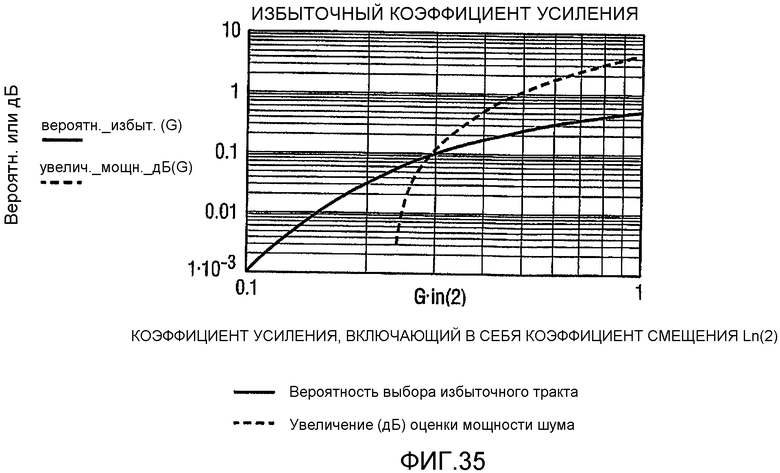


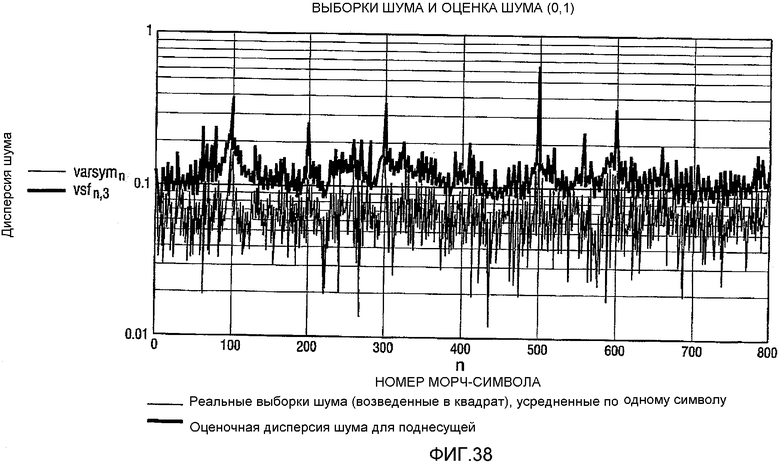

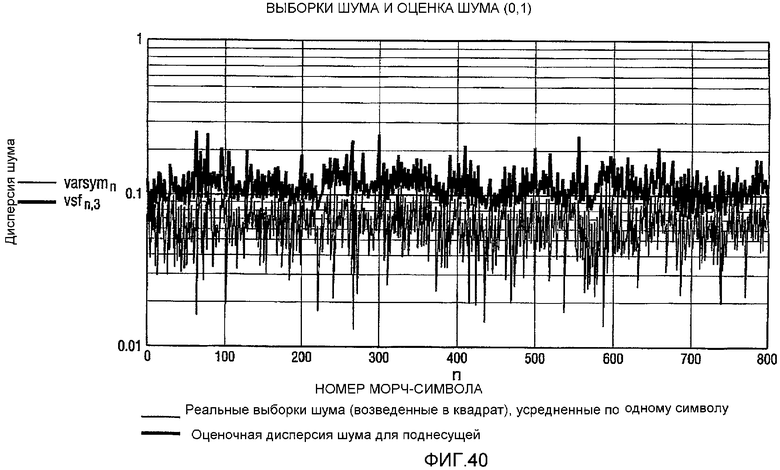
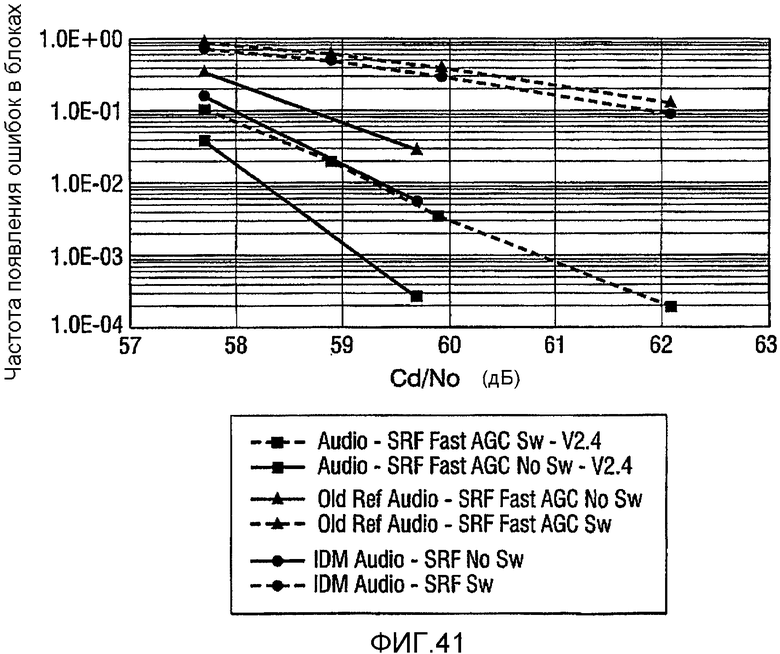
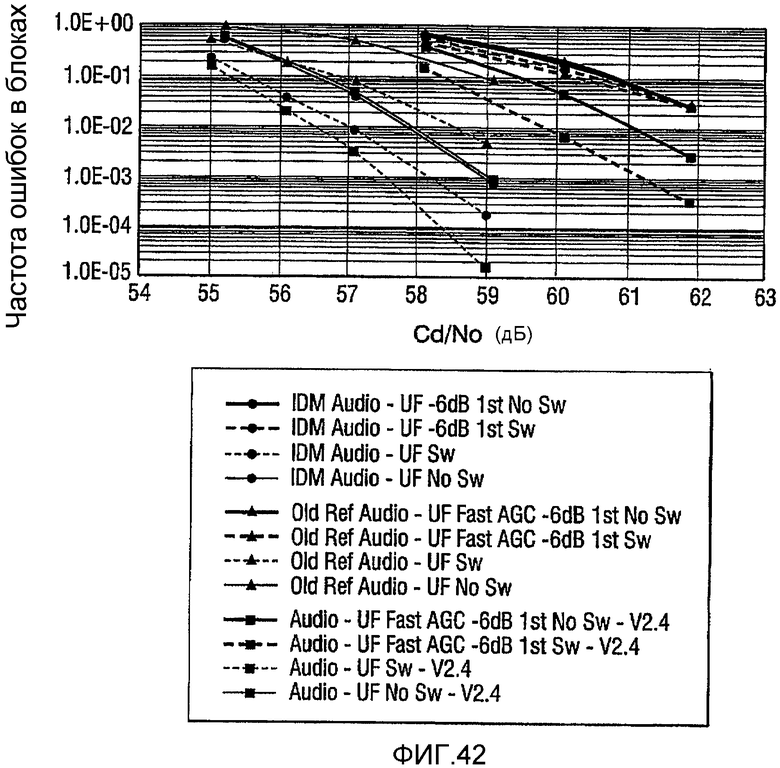
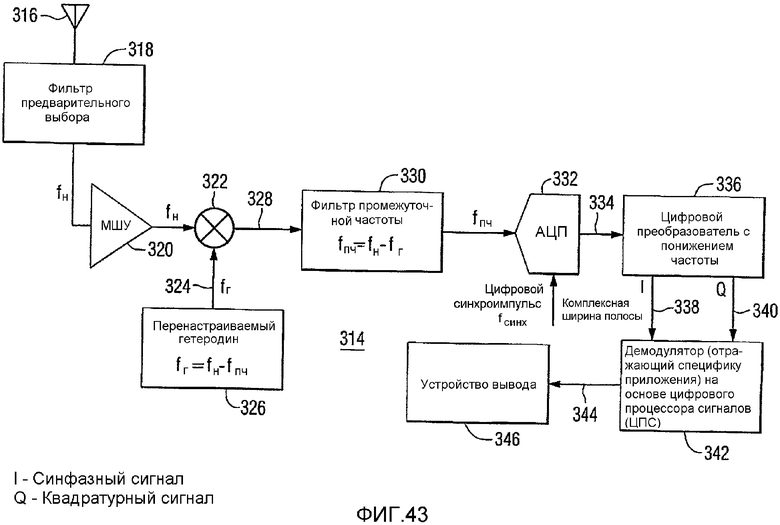

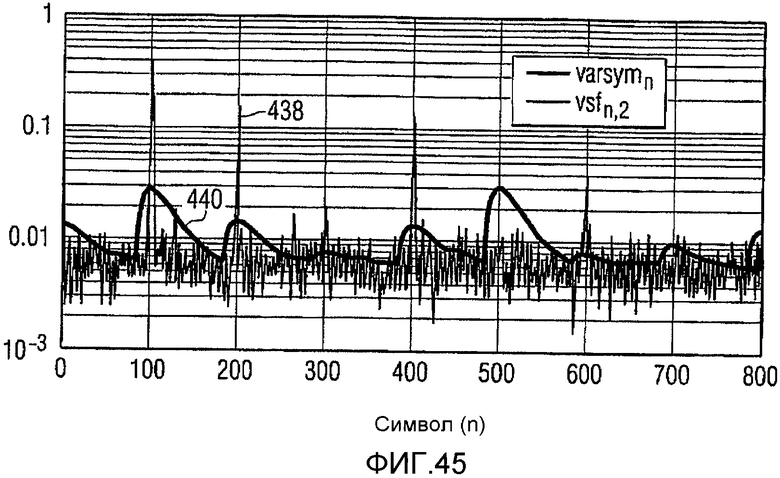

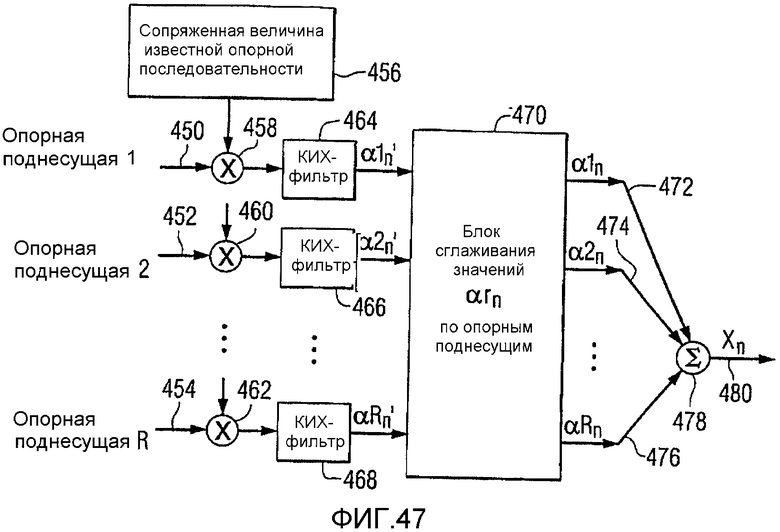
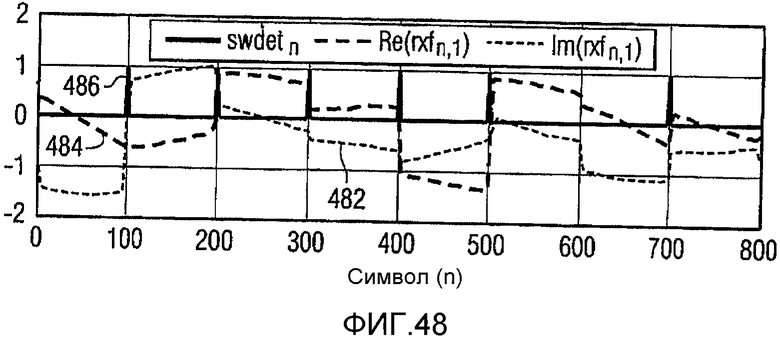
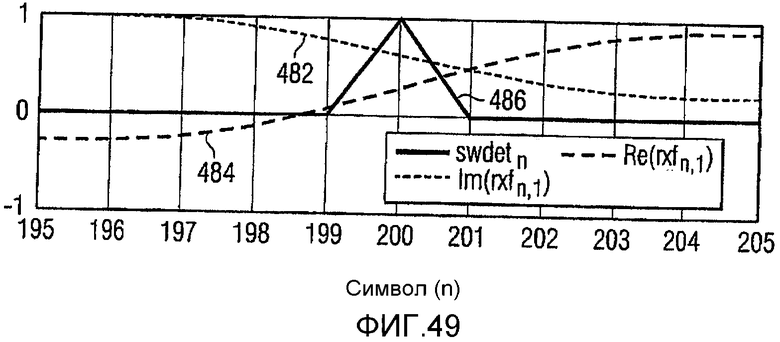
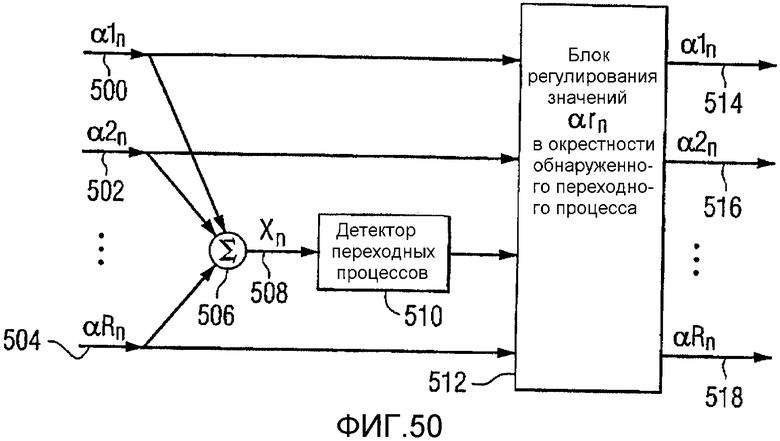
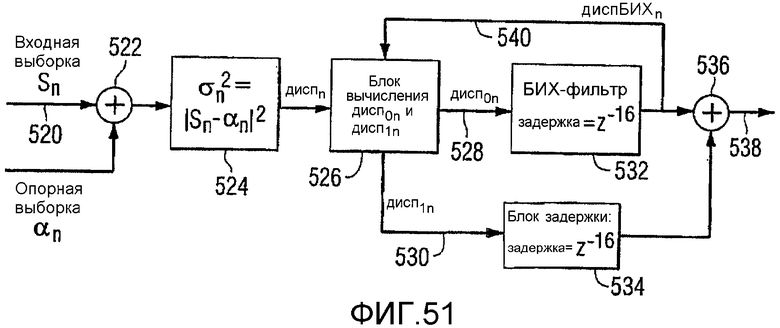

Изобретение относится к области приема радиосигналов и может использоваться при приеме сигналов с помощью антенной системы с коммутационным разнесением. Достигаемый технический результат - обеспечение согласования переходных процессов коммутации и улучшение алгоритмов когерентного слежения. Способ когерентного слежения за радиосигналом, включающим в себя множество опорных поднесущих, подвергнутых цифровой модуляции, включает в себя этапы, на которых принимают символы, передаваемые на опорных поднесущих, объединяют символы опорных поднесущих с сопряженной величиной известной опорной последовательности для получения множества выборок, осуществляют медианную фильтрацию выборок для получения отфильтрованных выборок и сглаживают выборки для каждой из опорных поднесущих на множестве опорных поднесущих для получения когерентной оценки опорного сигнала для каждой из поднесущих. 6 н. и 26 з.п. ф-лы, 52 ил., 3 табл.
1. Способ когерентного слежения за радиосигналом, включающим в себя множество опорных поднесущих, подвергнутых цифровой модуляции, включающий в себя этапы, на которых принимают символы, передаваемые на опорных поднесущих, с использованием множества антенных элементов, при этом коммутация между антенными элементами вызывает скачкообразный переходный процесс, объединяют символы опорных поднесущих с сопряженной величиной известной опорной последовательности для получения множества выборок, осуществляют медианную фильтрацию выборок для получения отфильтрованных выборок и сглаживают выборки для каждой из опорных поднесущих на множестве опорных поднесущих для получения когерентной оценки опорного сигнала для каждой из поднесущих.
2. Способ по п.1, дополнительно включающий в себя этапы, на которых используют упомянутое множество выборок и когерентную оценку опорного сигнала для каждой из поднесущих для получения сигнала дисперсии шума, фильтруют сигнал дисперсии шума для получения отфильтрованного сигнала дисперсии шума, выбирают между сигналом дисперсии шума и отфильтрованным сигналом дисперсии шума для определения выбранного сигнала дисперсии шума и сглаживают выбранный сигнал дисперсии шума для каждой из опорных поднесущих на множестве опорных поднесущих для получения оценки дисперсии шума сигнала для каждой из поднесущих.
3. Способ по п.2, в котором этап использования множества выборок и когерентной оценки опорного сигнала для каждой из поднесущих для получения сигнала дисперсии шума включает в себя этапы, на которых вычитают когерентную оценку опорного сигнала из упомянутого множества выборок для получения выборки шума и возводят в квадрат модуль выборки шума для получения сигнала дисперсии шума.
4. Способ по п.2, в котором упомянутый этап фильтрации сигнала дисперсии шума для получения отфильтрованного сигнала дисперсии шума включает в себя этап, на котором последовательно пропускают сигнал дисперсии шума через медианный фильтр и дополнительный фильтр для сглаживания сигнала дисперсии шума по частоте.
5. Способ по п.4, при осуществлении которого дополнительный фильтр содержит фильтр с бесконечной импульсной характеристикой или фильтр с конечной импульсной характеристикой.
6. Способ по п.2, дополнительно включающий в себя этап, на котором масштабируют сигнал дисперсии шума перед этапом выбора между сигналом дисперсии шума и отфильтрованным сигналом дисперсии шума для определения выбранного сигнала дисперсии шума.
7. Приемник для когерентного слежения за радиосигналом, включающим в себя множество опорных поднесущих, подвергнутых цифровой модуляции, содержащий множество антенных элементов для приема радиосигнала, при этом коммутация между антенными элементами вызывает скачкообразный переходный процесс, вход для приема радиосигнала и процессор для когерентного слежения за радиосигналом путем приема символов, передаваемых на опорных поднесущих, объединения символов опорных поднесущих с сопряженной величиной известной опорной последовательности для получения множества выборок, осуществления медианной фильтрации выборок для получения отфильтрованных выборок и сглаживания выборок для каждой из опорных поднесущих на множестве опорных поднесущих для получения когерентной оценки опорного сигнала для каждой из поднесущих.
8. Приемник по п.7, в котором процессор дополнительно использует упомянутое множество выборок и когерентную оценку опорного сигнала для каждой из поднесущих для получения сигнала дисперсии шума, фильтрует сигнал дисперсии шума для получения отфильтрованного сигнала дисперсии шума, выбирает между сигналом дисперсии шума и отфильтрованным сигналом дисперсии шума для определения выбранного сигнала дисперсии шума и сглаживает выбранный сигнал дисперсии шума для каждой из опорных поднесущих на множестве опорных поднесущих для получения оценки дисперсии шума сигнала для каждой из поднесущих.
9. Приемник по п.8, в котором процессор дополнительно вычитает когерентную оценку опорного сигнала из упомянутого множества выборок для получения выборки шума и возводит в квадрат модуль выборки шума для получения сигнала дисперсии шума.
10. Приемник по п.8, в котором процессор последовательно пропускает сигнал дисперсии шума через медианный фильтр и дополнительный фильтр.
11. Приемник по п.10, в котором дополнительный фильтр содержит фильтр с бесконечной импульсной характеристикой или фильтр с конечной импульсной характеристикой.
12. Приемник по п.8, в котором процессор масштабирует сигнал дисперсии шума перед этапом выбора между сигналом дисперсии шума и отфильтрованным сигналом дисперсии шума для определения выбранного сигнала дисперсии шума.
13. Способ когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции, включающий в себя этапы, на которых используют множество антенных элементов для приема радиосигнала, при этом коммутация между антенными элементами вызывает скачкообразный переходный процесс, демодулируют опорную несущую для получения комплексных когерентных опорных коэффициентов усиления, обнаруживают переходный процесс, который влияет на комплексные когерентные опорные коэффициенты усиления, фильтруют комплексные когерентные опорные коэффициенты усиления для получения сглаженных комплексных когерентных опорных коэффициентов усиления и обрабатывают сглаженные комплексные когерентные опорные коэффициенты усиления, отбрасывая значения комплексных когерентных опорных коэффициентов усиления, ближайшие к переходному процессу, и заменяя значения комплексных когерентных опорных коэффициентов усиления, ближайших к переходному процессу, ближайшим значением комплексных когерентных опорных коэффициентов усиления, на которые не влияет фильтр.
14. Способ по п.13, в котором радиосигнал содержит множество опорных поднесущих, и в котором регулируют комплексные когерентные опорные коэффициенты усиления в окрестности переходного процесса для каждой из опорных поднесущих.
15. Способ по п.13, в котором этап обнаружения переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, включает в себя этапы, на которых обрабатывают комплексные когерентные опорные коэффициенты усиления для множества опорных поднесущих и группируют комплексные когерентные опорные коэффициенты усиления по всем опорным поднесущим для получения одного составного опорного сигнала когерентного канала для каждого OFDM (мультиплексированного с ортогональным разделением частот) символа (МОРЧ-символа).
16. Способ по п.13, в котором этап обнаружения переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, включает в себя этапы, на которых вычисляют модуль разности множества составных опорных сигналов когерентного канала, определяют, является ли модуль локальным пиком, и если модуль является локальным пиком, то осуществляют обратное масштабирование модуля суммой модуля упомянутой разности.
17. Способ по п.13, в котором этап обнаружения переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, включает в себя этапы, на которых вычисляют последовательность выборок xn, исходя из комплексных когерентных опорных коэффициентов усиления, вычисляют квадрат разности diffsgn (разн.квадр.n) между выборками xn+1 и xn-1, задают переменную обнаружения пика detpeakn (обнаруж._пикn) равную единице, если diffsgn≥diffsgn-1 (разн.квадр.n≥разн.квадр.n-1) или diffsgn≥diffsgn+1 (разн.квадр.n≥разн.квадр.n+1), а в противном случае задают переменную обнаружения пика равной 0, и указывают наличие переходного процесса, если 
(разн.квадр.n/(|xn+1|2+|xn-1|2)) больше, чем предварительно определенное пороговое значение.
18. Способ по п.13, в котором этап обработки комплексных когерентных опорных коэффициентов усиления включает в себя этапы, на которых отбрасывают значения (α) комплексных когерентных опорных коэффициентов усиления, близких к переходному процессу, которые включают в себя символ, где обнаружен переходный процесс, и заменяют отброшенные значения (α) ближайшим значением α, на которое не влияет фильтр, используемый для оценки α.
19. Способ по п.13, в котором этап обработки комплексных когерентных опорных коэффициентов усиления включает в себя этапы, на которых если искаженное значение (α) комплексного когерентного опорного коэффициента усиления обнаруживается в пределах 3-х символов до текущего символа, то вместо использования текущего значения α используют значение (αn-4), которое находится в 4-х символах перед переходным процессом, если искаженное значение (α) комплексного когерентного опорного коэффициента усиления обнаруживается в пределах 3-х символов после текущего символа, то вместо использования текущего значения α используют значение (αn+4), которое находится в 4-х символах после переходного процесса, если искаженное значение (α) комплексного когерентного опорного коэффициента усиления оказывается в месте нахождения текущего обнаруженного символа, то используют среднее значение (αn-4+αn+4)/2 от значений α выборок, которые находятся в позиции ±4 символа с любой стороны от переходного процесса, и если искаженное значение (α) комплексного когерентного опорного коэффициента усиления не обнаружено, то используют текущие входные значения α.
20. Приемник для когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции, содержащий множество антенных элементов, подключенных к входу, при этом коммутация между антенными элементами вызывает скачкообразный переходный процесс, вход для приема радиосигнала и процессор для демодуляции опорной несущей для получения комплексных когерентных опорных коэффициентов усиления, для обнаружения скачкообразного переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, и для регулирования комплексных когерентных опорных коэффициентов усиления в окрестности переходного процесса для получения отрегулированных когерентных опорных коэффициентов усиления.
21. Приемник по п.20, в котором процессор подставляет предыдущее или будущее значение комплексного когерентного опорного коэффициента усиления вместо комплексного когерентного опорного коэффициента усиления в окрестности переходного процесса.
22. Приемник по п.20, в котором процессор фильтрует комплексные когерентные опорные коэффициенты усиления для получения сглаженных комплексных когерентных опорных коэффициентов усиления и обрабатывает сглаженные комплексные когерентные опорные коэффициенты усиления, отбрасывая значения комплексных когерентных опорных коэффициентов усиления, ближайшие к переходному процессу, и заменяя значения комплексных когерентных опорных коэффициентов усиления, ближайших к переходному процессу, ближайшим значением комплексных когерентных опорных коэффициентов усиления, на которые не влияет фильтр.
23. Приемник по п.20, в котором радиосигнал содержит множество опорных поднесущих, и в котором регулируют комплексные когерентные опорные коэффициенты усиления в окрестности переходного процесса для каждой из опорных поднесущих.
24. Приемник по п.20, в котором процессор обрабатывает комплексные когерентные опорные коэффициенты усиления для множества опорных поднесущих и группирует комплексные когерентные опорные коэффициенты усиления по всем опорным поднесущим для получения одного составного опорного сигнала когерентного канала для каждого OFDM символа.
25. Приемник по п.20, в котором процессор вычисляет модуль разности множества составных опорных сигналов когерентного канала, определяет, является ли модуль локальным пиком, и если модуль является локальным пиком, то осуществляет обратное масштабирование модуля суммой модуля упомянутой разности.
26. Приемник по п.20, в котором процессор принимает последовательность выборок xn, вычисляет квадрат разности diffsgn (разн.квадр.n) между выборками xn+1 и xn-1, задает переменную обнаружения пика ditpeakn (обнаруж._пикn) равной единице, если diffsgn≥diffsgn-1 (разн.квадр.n≥разн.квадр.n-1) или diffsgn≥diffsgn+1 (разн.квадр.n≥разн.квадр.n+1), а в противном случае задают переменную обнаружения пика равной 0, и указывает наличие переходного процесса, если
(разн.квадр.n/(|xn+1|2+|xn-1|2)) больше, чем предварительно определенное пороговое значение.
27. Приемник по п.20, в котором процессор отбрасывает значения (α) комплексных когерентных опорных коэффициентов усиления, близких к переходному процессу, которые включают в себя символ, где обнаружен переходный процесс, и заменяет отброшенные значения (α) ближайшим значением α, на которое не влияет фильтр, используемый для оценки α.
28. Приемник по п.20, в котором если искаженное значение (α) комплексного когерентного опорного коэффициента усиления обнаруживается в пределах 3-х символов до текущего символа, то вместо использования текущего значения α используется значение (αn-4), которое находится в 4-х символах перед переходным процессом, если искаженное значение (α) комплексного когерентного опорного коэффициента усиления обнаруживается в пределах 3-х символов после текущего символа, то вместо использования текущего значения α используется значение (αn+4), которое находится в 4-х символах после переходного процесса, если искаженное значение (α) комплексного когерентного опорного коэффициента усиления оказывается в месте нахождения текущего обнаруженного символа, то используется среднее значение (αn-4+αn+4)/2 от значений α выборок, которые находятся в позиции ±4 символа с любой стороны от переходного процесса, и если искаженное значение (α) комплексного когерентного опорного коэффициента усиления не обнаружено, то используются текущие входные значения.
29. Приемник для когерентного слежения за радиосигналом, включающим в себя, по меньшей мере, одну опорную несущую, подвергнутую цифровой модуляции, содержащий множество антенных элементов, подключенных к входу, при этом коммутация между антенными элементами вызывает скачкообразный переходный процесс, вход для приема радиосигнала и средство для демодуляции опорной несущей для получения комплексных когерентных опорных коэффициентов усиления, для обнаружения переходного процесса, который влияет на комплексные когерентные опорные коэффициенты усиления, и для регулирования комплексных когерентных опорных коэффициентов усиления в окрестности переходного процесса для получения отрегулированных комплексных когерентных опорных коэффициентов усиления.
30. Способ оценки дисперсии шума символов в радиосигнале, когда шум может включать в себя выборки импульсообразного шума среди выборок гауссообразного шума, при этом способ включает в себя этапы, на которых суммируют входные выборки и когерентные опорные выборки для получения выборок ошибок, вычисляют квадраты выборок ошибок, разделяют возведенные в квадрат выборки гауссообразного шума и возведенные в квадрат выборки импульсообразного шума, и осуществляют нелинейную фильтрацию квадратов выборок ошибок для получения оценки дисперсии шума, представляющей собой сумму долговременной усредненной дисперсии гауссообразного шума и кратковременной дисперсии импульсного шума.
31. Способ по п.30, включающий в себя этап, на котором определяют, является ли каждая возведенная в квадрат выборка шума импульсообразной, путем сравнения выборки с некоторым кратным текущей усредненной оценки дисперсии шума, и если возведенная в квадрат выборка шума не определяется как импульсообразная, то вводят возведенную в квадрат выборку шума в используемый фильтр для оценки долговременной дисперсии гауссообразного шума, и если выборка шума определена как импульсообразная, то уменьшают возведенную в квадрат выборку шума в фильтре для предотвращения переоценки долговременной гауссообразной дисперсии шума.
32. Способ по п.30, включающий в себя этап, на котором создают значение избыточного шума, включающее в себя часть уменьшенной возведенной в квадрат выборки шума, и прибавляют значение избыточного шума к оценке дисперсии гауссобразного шума для получения дисперсии составного шума, отображающей сумму долговременной усредненной дисперсии гауссообразного шума и кратковременной дисперсии импульсного шума.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 5465411 А, 07.11.1995 | |||
| СИСТЕМА И СПОСОБ СГЛАЖИВАНИЯ ПЕРИОДИЧЕСКИХ ПРЕРЫВАНИЙ В СИСТЕМЕ РАДИОВЕЩАНИЯ АУДИОСИГНАЛА | 1998 |
|
RU2213422C2 |
| Устройство для воздействия на пласт | 1981 |
|
SU1047236A1 |

