Область техники, к которой относится изобретение
Настоящее изобретение относится к области цифровой связи, а более конкретно к системе для автоподстройки или устранения ошибки синхронизации символа и ошибки частоты несущей из сигнала связи с несколькими несущими и цифровой модуляцией. Система настоящего изобретения дополнительно относится к системе с разнесением для устранения ошибки синхронизации символа и ошибки по частоте несущей из многочастотного сигнала с разнесением по частоте и цифровой модуляцией.
Уровень техники
Перед началом эффективной демодуляции символов в приемнике должна быть установлена синхронизация символов между передатчиком и приемником цифровой системы связи. Таким образом, в цифровой связи, известной из уровня техники, разработано большое число систем, предназначенных для оптимального восстановления или автоподстройки синхронизации принятых символов и частоты несущей.
Одна такая система представлена Сузуки в патенте США №5541552, который относится к демодуляции символов с несколькими несущими и цифровой модуляцией. В этом патенте приемник формирует корреляционные пики, которые зависят от межсимвольной корреляции, например путем формирования произведений сопряженных величин, между повторяющейся информацией и плавным изменением амплитуды, имеющимся на передней части и задней части каждого принятого символа. Пики необходимо обнаруживать потому, что их положения свидетельствуют о синхронизации принятых символов. Однако их относительно плоские амплитудные профили делают необходимым проведение индивидуального интегрирования амплитудных профилей перед обнаружением пика.
Такая упрощенная схема обработки сигналов у Сузуки, то есть, простое интегрирование корреляционных пиков перед их обнаружением, позволяет получить близкие к оптимальным результаты синхронизации, по меньшей мере, по двум подсчетам. Во-первых, так как у символов с несколькими несущими число несущих частот увеличивается, то корреляционный пик становится незаметным на фоне шумов, и в этом случае простого интегрирования уже недостаточно для повышения отношения сигнал/шум у предварительно обнаруженных корреляционных пиков. Во-вторых, простого интегрирования недостаточно для борьбы с такими хорошо известными эффектами при распространении сигнала как рассеяние, замирание или помехи других сигналов, каждый из которых приводит к пропаданию сигнала и образованию ложных пиков.
В работе Мочизуки Н. и других "Высокоэффективный метод частотно-временной синхронизации для ОЧУ сигналов". Труды конференции ИИЭР по глобальным телекоммуникациям, США, Нью-Йорк, 1998 год, с.3443-3448 (Mochizuki, N. et al., "A High Performance Frequency and Timing Synchronization Technique for OFDM", IEEE Global Telecommunications Conference, U.S., New York, New York, IEEE 1998, P.3443-3448), раскрыт метод частотно-временной синхронизации, основанный на повторении сигнала, для пакетных модемов ОЧУ в условиях замирания разъединением.
В противоположность Сузуки и другим системам установления синхронизации, известным из уровня техники, система настоящего изобретения представляет оптимальную схему для восстановления синхронизация сигнала и частоты несущей. Этот оптимальный подход выполняется с использованием методов обработки сигналов, который при его отдельном использовании или в комбинации с другими методами позволяет усовершенствовать предшествующий уровень техники. Эти усовершенствования в обработке сигналов включают в себя аддитивное наложение повторяющихся сигналов, оптимальную или согласованную фильтрацию или разнесенный выбор и объединение между частотно-разнесенными модулированными сигналами.
В опубликованной заявке WO A 9749207 раскрыта система цифрового радиовещания, в которой множества поднесущих с цифровой модуляцией передают на верхней и нижней боковых полосах частот одновременно с несущей с аналоговой модуляцией в общем радиоканале. Однако в опубликованной заявке WO A 9749207 не раскрыт метод определения временного сдвига символа и синхронизации в приемниках систем цифрового радиовещания.
Ниже приводится список ссылок, известных заявителю из уровня техники: патенты США №5694389, №5602835, №5608764, №5559833, №5687165, №5541552, №5357502, №3925650, №5596582, №3364482, №2943316, №3975687, №5594761, №4281412, №5187711, №4727534, №5369800, №5548819, №2549423, №2880275, №3555427, №5629639, №5428647, №5682376, №5416767, №5452331, №4344180, №5657313, №5652772, №5627683, №5550812, №5506836, №5471464, №5450456, №5371761, 35345440, №5313169, №5228025, 35191576, 35371548, №5406551 и №3780279.
Сущность изобретения
Задача настоящего изобретения заключается в том, чтобы создать систему для оптимального восстановления синхронизации символов и частоты несущей из сигнала с несколькими несущими и цифровой модуляцией. В частности, сигнал с цифровой модуляцией является сигналом с ортогональным частотным уплотнением (ОЧУ), который может включать в себя большое число несущих.
Один аспект настоящего изобретения представляет собой систему для устранения ошибки синхронизации символа и ошибки по частоте несущей из сигнала ОЧУ. Система включает в себя приемный модуль для приема модулированного сигнала ОЧУ, который представлен в виде последовательности символов ОЧУ. Каждый символ ОЧУ имеет переднюю часть ("фронт") и заднюю часть ("фронт") символа. Передняя часть и задняя часть имеют по существу эквивалентные фазы и взвешенные во времени амплитуды в соответствии с заданной функцией временного взвешивания. Приемный модуль обеспечивает подачу принятого сигнала на его выход.
Система также включает в себя модуль формирования пика сигнала, который формирует граничный сигнал, состоящий из множества пиков сигнала, представляющих граничное положение символа для каждого из принятых символов ОЧУ. Каждый из пиков сигнала формируется в зависимости от амплитудно-фазового соответствия, которое существует между передней и задней частями принятого символа ОЧУ.
Система дополнительно включает в себя модуль усиления сигнала, который повышает вероятность обнаружения пика сигнала из граничного сигнала. Модуль усиления сигнала включает в себя схему для аддитивного наложения множества сегментов граничного сигнала. Модуль усиления сигнала выводит усиленный пик сигнала, соответствующий заданному числу сегментов из множества сегментов и имеющий повышенное отношение сигнал/шум.
Система включает в себя схему для установления временного положения, показывающего граничное положение символа, по меньшей мере, из одного из усиленных пиков сигнала на выходе модуля усиления сигнала. Временное положение представляет собой ошибку синхронизации принятого символа ОЧУ.
В систему также входит схема для устранения ошибки по частоте несущей принятого сигнала ОЧУ в соответствии с временным положением.
Модуль усиления сигнала дополнительно включает в себя согласованный фильтр для фильтрации сигналов, полученных в ответ на граничный сигнал. Кроме того, согласованный фильтр увеличивает отношение сигнал/шум у усиленных пиков сигнала на выходе модуля усиления сигнала. Согласованный фильтр имеет временную импульсную характеристику, согласованную с амплитудной огибающей пиков сигнала, присутствующих в граничном сигнале.
Другой задачей настоящего изобретения является усовершенствование процесса автоподстройки синхронизации символов и частоты несущей с использованием выбора разнесения сигнала или объединения. В аспекте частотного разнесения настоящего изобретения система с разнесением, предназначенная для устранения ошибки синхронизации символа и ошибки по частоте несущей из сигнала ОЧУ, включает в себя передатчик для передачи модулированного сигнала ОЧУ на верхней и нижней боковой полосе частот. В каждой из боковых полос находится множество модулированных несущих частот ОЧУ и последовательности символов ОЧУ.
Система с разнесением включает в себя приемную часть для приема модулированного сигнала ОЧУ на верхней и нижней боковой полосе частот и вывода принятого сигнала на первой или верхней боковой полосе частот и модулированного сигнала ОЧУ на нижней боковой полосе частот и обеспечивает вывод принятого сигнала на второй или нижней боковой полосе.
Система с разнесением также включает в себя первую схему устранения для формирования ошибки синхронизации символа на первой или верхней боковой полосе, соответствующей символам ОЧУ в первом принятом сигнале, и вторую схему устранения для формирования ошибки синхронизации символа на второй или нижней боковой полосе, соответствующей символам ОЧУ во втором принятом сигнале.
Кроме того, система с разнесением включает в себя первую схему подтверждения, предназначенную для подтверждения правильности первой ошибки синхронизации символа на основании заданного для нее постоянства во времени, и вторую схему подтверждения, подтверждающую правильность второй ошибки синхронизации символа на основании заданного для нее постоянства во времени.
Кроме того, система с разнесением включает в себя схему для выбора оптимальной ошибки синхронизации из первой и второй ошибок синхронизации символов в ответ на сигналы, которые выходят из первой и второй схем подтверждения, и схему демодулятора для демодуляции, по меньшей мере, одного из последовательности символов ОЧУ с использованием оптимальной ошибки синхронизации символа.
Согласно дополнительному аспекту настоящего изобретения система с разнесением включает в себя схему для формирования суммарной ошибки синхронизации символа, соответствующей комбинации первого и второго сигналов синхронизации, представляющих соответственно первую и вторую ошибки синхронизации символов, и схему для выбора ошибки синхронизации третьего символа в ответ на множество условных входных сигналов.
Краткое описание чертежей
Сущность изобретения иллюстрируется ссылкой на сопроводительные чертежи, на которых:
фиг.1а изображает в графическом виде сигнал ОЧУ в частотной области;
фиг.1b изображает в графическом виде сигнал ОЧУ во временной области;
фиг.1с изображает в графическом виде пики сигнала, полученные в результате сопряженного произведения, которые представляют собой границы символов;
фиг.1d изображает в графическом виде сопряженные произведения, полученные при перемножении соответствующих плавных изменений амплитуды;
фиг.2 изображает частично блок-схему входного каскада приемника согласно настоящему изобретению;
фиг.3 изображает блок-схему модуля автоподстройки согласно первому варианту осуществления настоящего изобретения;
фиг.4 изображает блок-схему модуля автоподстройки согласно второму варианту осуществления настоящего изобретения;
фиг.5 изображает блок-схему модуля автоподстройки согласно третьему варианту осуществления настоящего изобретения;
фиг.6а, 6b и 6с изображают в графическом виде привязку по времени символов для модуля формирования пиков настоящего изобретения;
фиг.7а, 7b, 7с и 7d изображают в графическом виде обработку сигнала, которая выполняется согласно настоящему изобретению; и
фиг.8 изображает блок-схему, представляющую собой логические блоки принятия решения и выбора для логического модуля сложения разнесенных сигналов, согласно третьему варианту осуществления (фиг.5) настоящего изобретения.
Описание предпочтительных вариантов осуществления
В приемопередающей схеме цифровой связи, в которой последовательность сигналов, несущих информацию и имеющих цифровую модуляцию, передается в приемник, в котором должна выполняться демодуляция символов для того, чтобы восстановить информацию, переданную таким способом, при этом демодулятор приемника позволяет выполнить успешно и оптимальным способом демодуляцию символов только в случае, если в приемнике удается установить синхронизацию и фазу/частоту переданных символов. Таким образом, перед успешным выполнением демодуляции принятых символов приемник должен выполнить автоподстройку или восстановить синхронизацию принятых символов и фазу/частоту несущей, которые должны использоваться в процессе демодуляции. После восстановления в приемнике синхронизации принятых символов и частоты начинается демодуляция символа, при этом синхронизацию символов и частоты несущей можно отследить посредством следящего контура для того, чтобы поддерживалась целостность процесса демодуляции. В настоящем изобретении система или конфигурация предназначена для передачи последовательности символов, модулированных цифровым способом, в приемник, в котором должна происходить демодуляция символов. В частности, система в настоящем изобретении сориентирована на обнаружение ошибки синхронизации принятых символов и ошибки фазы/частоты несущей так, чтобы можно было начать эффективную демодуляцию и последующее слежение за синхронизацией символов и частотой несущей.
Система и способ автоподстройки или устранения ошибки синхронизации символов и ошибки по частоте несущей в настоящем изобретении особенно хорошо подходят для условий, в которых передатчик передает а приемник принимает сигнал с ортогональным частотным уплотнением (ОЧУ). Как показано на фиг.1а, сигнал ОЧУ, который используется в настоящем изобретении, характеризуется как сигнал с многочисленными несущими частотами, содержащий множество эквидистантно расположенных поднесущих f1-fn. Соседние поднесущие, такие как f1 и f2, разделены друг от друга на заданное приращение частоты так, чтобы соседние поднесущие были ортогональными друг к другу. Под понятием "ортогональный" понимают, что при правильном взвешивании по критерию Найквиста поднесущие не имеют перекрестных помех. В одной гибридной системе, которая входит в настоящее изобретение и в которой используются цифровые и аналоговые каналы передачи, существует 191 несущая на каждой боковой полосе с шириной полосы частот 70 кГц для каждой боковой полосы. Во всех цифровых реализациях настоящего изобретения имеется 267 несущих на каждой боковой полосе с шириной полосы частот 97 кГц для каждой боковой полосы.
Как показано на фиг.1b, каждый символ 5 ОЧУ во временной области имеет эффективный период символа или временной интервал Т и полный период Тα символа. Требование ортогональности для поднесущей ОЧУ приводит к функциональной взаимозависимости между эффективным периодом Т символа и разносу частот между соседними поднесущими ОЧУ. В частности, частотное разделение между соседними поднесущими равно обратной величине эффективного периода Т символа каждого символа 5 ОЧУ. То есть, частотное разделение равно 1/Т.
На фиг.1b отрезок эффективного периода Т символа каждого символа 5 ОЧУ представляет собой заданное число N эквидистантно расположенных временных выборок символа (не показано). Кроме того, отрезок полного периода Тα каждого символа 5 ОЧУ представляет собой заданное число Nα=N(1+α) эквидистантно расположенных временных выборок символа. Как будет описано позже в этом раскрытии, α - это коэффициент плавного изменения амплитуды для символа и может рассматриваться здесь как дробный множитель. Кроме того, заданный амплитудно-временной профиль или огибающая 10, 15, 20 накладывается на уровни сигнала этих выборок. Этот амплитудный профиль включает в себя симметричное нарастание и спад плавных изменений 10, 15 амплитуды соответственно на передней части и задней части каждого символа 5 и относительно плоский амплитудный профиль 20, простирающийся между ними. Эти закругленные или плавно изменяющиеся фронты, представленные во временной области, служат для существенного уменьшения нежелательной энергии боковых лепестков в частотной области, таким образом обеспечивая большую спектральную эффективность сигнала ОЧУ. Хотя полный период Тα символа 5 превышает эффективный период Т символа, ортогональность между соседними поднесущими в частотной области (фиг.1а) сохраняется до тех пор, пока плавные изменения амплитуды 10, 15 символа 5 повторяют функцию Найквиста или функцию плавного изменения в виде приподнятого косинуса. В частности, в настоящем изобретении ортогональность поддерживается путем комбинации взвешивания функции квадратного корня из приподнятого косинуса (или плавного изменения амплитуды) переданных символов и согласованной фильтрации на основе операции квадратного корня из приподнятого косинуса принятых символов.
Передняя и задняя части символа 5 ОЧУ совместно используют другую важную особенность, а именно первые N выборок символа ОЧУ, которые простираются поперек передней части символа 5 ОЧУ, которая имеет временную длительность αТ, имеют по существу эквивалентные фазы, так как по меньшей мере αN выборок символа, которые простираются поперек задней части символа 5 ОЧУ, которая также имеет временную длительность αТ. Следует снова отметить, что α - это коэффициент плавного изменения амплитуды для символа и может рассматриваться здесь как дробный множитель. Как будет более полно описано здесь, эти заданные амплитудные и фазовые свойства, присущие передней и задней частям символа ОЧУ настоящего изобретения, а именно плавное изменение амплитуд выборки в передней и задней частях каждого символа ОЧУ и его эквивалентные фазы, преимущественно используются в системе настоящего изобретения для того, чтобы эффективно осуществить автоподстройку синхронизации и частоты символа ОЧУ в приемнике для того, чтобы можно было начать демодуляцию символа.
После предыдущего описания характеристик символа ОЧУ, которые используются в настоящем изобретении, ниже рассматривается система для восстановления синхронизации системы в настоящем изобретении. Как показано на фиг.2, приемопередающая система цифровой связи настоящего изобретения включает в себя модуль 25 модулятора ОЧУ для формирования модулированного сигнала 30 передачи ОЧУ на его выходе, который передается в приемник 150 сигнала ОЧУ для демодуляции там с помощью демодулятора 100 ОЧУ. Сигнал 30 передачи ОЧУ, сформированный с помощью модулятора 25 ОЧУ, соответствует характеристикам сигнала ОЧУ, показанным на фиг.1а и 1b и описанным ранее. То есть, модулятор 25 ОЧУ формирует последовательность символов 5 ОЧУ (фиг.1b), каждый из которых содержит заданное число временных выборок Nα символа, соответствующих полному периоду Тα символа, в котором первые αN выборок и последние αN выборок каждого символа имеют плавное изменение и равные фазы. Для упрощения дальнейшего обсуждения обработки сигнала символа предполагается, что заданное число Nα временных выборок, простирающихся поперек каждого полного периода Тα символа, равно 1080, что заданное число N временных выборок, простирающихся поперек каждого эффективного периода Т символа, равно 1024, и что число выборок в каждом наборе из первых αN выборок и последних αN выборок равно 56, однако эти значения являются только примерными и могут изменяться в соответствии с требованиями системы. Следует дополнительно отметить, что источник 40 информации обеспечивает подачу информационных сигналов на вход модулятора 35 ОЧУ, который осуществляет модуляцию символов ОЧУ информационными сигналами и вывод в виде сигнала 30.
Сигнал 30 передачи ОЧУ передается в приемник 150 сигнала ОЧУ с помощью любого механизма и через любую среду, которые известны в системах связи предшествующего уровня техники. Например, передаваемый сигнал 30 ОЧУ можно представить в виде аналогового сигнала, радиочастотного сигнала, такого как сигнал радиовещания или, альтернативно, можно представить даже в виде цифрового сигнала основной полосы частот. Физические среды 45, через которые передается сигнал 30, могут быть атмосферными, оптическими, проводными или другими. С другой стороны, передаваемый сигнал 30 может быть сигналом, сформированным с помощью компьютера и подходящим для целей имитации, то есть сигнал, сформированный в компьютере, обеспечивает связь между модулями программного обеспечения, в то же время как между модулем модулятора ОЧУ, основанном на компьютерной программе, и приемным модулем сигнала ОЧУ, основанном на компьютерной программе. Ни одно из предыдущих изменений не влияет на преимущественное применение конфигурации системы и методов настоящего изобретения, которые обеспечивают обнаружение ошибки синхронизации символов ОЧУ и ошибки по частоте несущей.
Передаваемый сигнал 30 ОЧУ принимают с помощью приемника 150 сигнала ОЧУ, который включает в себя модуль приемника для предварительной обработки сигнала (не показан), который известен из уровня техники и который подходящим образом приспосабливает способ и среду передачи, выбранную для любого заданного применения. В варианте осуществления (фиг.2) этот приемник для предварительной обработки сигнала обеспечивает подачу аналогового сигнала 45 ОЧУ на вход аналого-цифрового преобразователя (АЦП) 50. АЦП 50 дискретизирует или оцифровывает принятый аналоговый сигнал 50, который подается на его вход, для получения на его выходе сигнала, который содержит последовательность комплексных выборок сигнала. Выборки сигнала являются комплексными потому, что каждая комплексная выборка фактически содержит пару выборок сигнала, включающих в себя "действительную" выборку и "мнимую" выборку, которая дискретизируется в квадратуре для действительной выборки. Дискретизированный сигнал затем фильтруется с помощью полосового фильтра 55, который имеет частотную характеристику с полосой пропускания, содержащую групповой набор поднесущих f1-fn, представленных в принятом сигнале ОЧУ.
Дискретизированный и фильтрованный принятый комплексный сигнал 60 затем корректируется по частоте с помощью схемы или модуля 65 частотной коррекции. Полученный в результате сигнал с частотной коррекцией затем корректируется по времени с помощью схемы или модуля 70 временной коррекции. Сигнал с частотной и временной коррекцией, который поступает на вход схемы 70 временной коррекции, подается на вход демодулятора 100 ОЧУ, который демодулирует принятый сигнал с частотной и временной коррекцией на его входе.
Принятый комплексный сигнал 60 дополнительно направляется на вход модуля 75 автоподстройки, который является предметом настоящего изобретения. Модуль 75 автоподстройки осуществляет автоподстройку или устраняет временной сдвиг символа ОЧУ, или ошибку, или сдвиг по частоте несущей, или ошибку из принятых символов ОЧУ, которые представлены в виде принятого комплексного сигнала 60, таким образом, обеспечивая ошибку Δt синхронизации символа и ошибку Δf по частоте несущей, которые соответственно вводятся в схему 70 временной коррекции и схему 65 частотной коррекции. Модуль 75 автоподстройки дополнительно формирует сигнал 80 состояния автоподстройки, который поступает на вход модуля 85 управления и слежения. Модуль 85 управления и слежения управляет работой демодулятора 100 через управляющий сигнал 90 демодулятора. Модуль 85 управления и слежения совместно с ошибкой синхронизации и ошибкой по частоте несущей, которые поступают в него с помощью модуля 75 автоподстройки, позволяет проводить точное восстановление в целом синхронизации символа и частоты несущей с помощью приемника ОЧУ.
Как показано на фиг.3, в первом варианте осуществления модуля 75 автоподстройки принятый комплексный сигнал 60 подается на вход модуля 110 формирования пика, который осуществляет первую стадию обработки сигнала для обнаружения ошибки синхронизации символа принятого сигнала ОЧУ. На выходе модуля 110 формирования пика формируется граничный сигнал 130, который имеет множество пиков сигнала, причем каждый пик сигнала представляет граничное положение принятого символа для каждого принятого символа ОЧУ, представленного в принятом сигнале 60, который вводится в модуль 110 формирования пика. Так как эти пики сигнала представляют граничные положения принятого символа, их временные положения показывают ошибку синхронизации принятого символа. В частности, так как приемник не имеет первоначального или априорного знания об истинном или действительном граничном положении принятого символа, то такое положение первоначально предполагается или произвольно создается для того, чтобы приемник позволял проводить обработку сигнала. Модуль 75 автоподстройки устанавливает ошибку Δt синхронизации символа, которая существует между этим априорным предположением и истинным, граничным положением принятого символа, таким образом, позволяя приемнику восстанавливать и отслеживать синхронизацию символа.
При формировании пиков сигнала, представляющих границы символов ОЧУ, модуль 110 формирования пика использует заданное плавное изменение амплитуды и эквивалентные фазовые свойства, характерные для передней и задней частей каждого принятого символа ОЧУ. В частности, комплексные сопряженные множители или произведения формируются между текущей выборкой и выборкой, предшествующей ей на N выборок. Такие произведения, образованные между первыми αN выборками и последними αN выборками в каждом символе, дают пик сигнала, соответствующий каждому символу, содержащему αN сопряженных произведений, таким способом образованных.
Математически такое образование сопряженных произведений выражается следующим образом. Допустим D(t) обозначает принятый сигнал ОЧУ, и допустим Тα=(1-α)Т обозначает полную длительность символа ОЧУ или период, где 1/Т - разнос каналов ОЧУ и α - коэффи-циент плавного изменения амплитуды символа. Пики сигнала в граничном сигнале 130 появляются в виде последовательности импульсов или пиков сигнала в сопряженных произведениях D(t)*D’(t-Т). В результате плавного изменения амплитуды Найквиста, наложенного на переднюю и заднюю части каждого символа ОЧУ, каждый из импульсов или пиков сигнала имеет полусинусоидальный амплитудный профиль в виде
w(t)={1/2sin(πt/(αТ)), для 0≤t≤αТ, и
w(t)={0, в других случаях.
Кроме того, периодичность сигнала 130, то есть период последовательности пиков сигнала, равна Тα. Как показано на фиг.1с, последовательность пиков сигнала, которые входят в граничный сигнал 130, имеет амплитудную огибающую w(t), и пики расположены с периодом Тα. Как показано на фиг.1d, произведение перекрывающихся плавных изменений 10, 15 амплитуды передней и задней частей представляет собой перемножение квадратов величин в сопряженных произведениях, что приводит в результате к полусинусоидальной волне w(t), которая имеет длительность αТ, соответствующую αN выборкам.
Возвращаясь снова к фиг.3, для каждой выборки сигнала, которая вводится в модуль 110 формирования пика, одна выборка произведения выводится из схемы 125 умножителя, представляя собой сопряженное произведение между этой входной выборкой и предшествующей выборкой, при этом выборки расположены друг от друга с периодом Т. Формирователь 120 комплексно-сопряженных величин производит на своем выходе комплексное сопряжение каждой входной выборки, выходной сигнал которого служит в качестве одного входного сигнала для умножителя 125. Сопряженные выборки на этом выходе умножаются на задержанную выборку, которая выводится из схемы 115 задержки. В этом способе комплексно-сопряженные произведения образуются между принятым сигналом 60 и его задержанной копией, полученной с помощью задержки принятого сигнала 60 на заданный период времени Т с использованием схемы 115 задержки.
На фиг.6 изображена синхронизация релевантного символа для модуля 110 формирования пика. На фиг.6а изображены последовательные символы 1 и 2 ОЧУ, которые подаются на вход модуля 110 формирования пика. На фиг.6b изображены задержанные версии символов 1 и 2 ОЧУ в виде выходных сигналов схемы 115 задержки. На фиг.6с изображен пик сигнала, сформированный для каждого соответствующего набора выборок произведения Nα=N(1+α) (который в одном рабочем варианте осуществления равен 1080 выборкам), при этом последовательность пиков сигнала получают в ответ на сопряженное умножение принятого сигнала (фиг.6а) на его задержанную версию (фиг.6b).
Из представленного конкретного примера видно, что если период Тα принятого символа ОЧУ соответствует Nα=1080 выборкам сигнала, и αN выборок в каждой передней и задней частях символа соответствуют 56 выборкам сигнала, то для каждого символа ОЧУ из 1080 выборок, который вводится в модуль 110 формирования пика, появляется соответствующий набор из 1080 выборок произведения в граничном сигнале 130. В этом примере схема 115 задержки дает задержку на 1024 (N) выборок так, что каждая выборка, которая вводится в умножитель 125, умножается на 1024 выборок своего предшественника. Пик сигнала, таким способом сформированный для каждого соответствующего набора из 1080 выборок произведения, содержит только 56 произведений сопряженных величин, образованных между первой и последней 56 выборками из каждого соответствующего символа.
Модуль 110 формирования пика можно выполнить различными способами, пока используется соответствие между передней и задней частями каждого символа, полученное способом, описанным ранее. Например, модуль 110 формирования пика может срабатывать на каждую выборку в момент ее прихода так, чтобы в течение каждой выборки на его выходе была получена выборка произведения. С другой стороны, можно сохранить множество выборок, например, в векторной форме, таким образом, создавая вектора текущих выборок и вектора задержанных выборок, при этом вектора можно вводить в векторный умножитель для получения на его выходе выборок векторного произведения. С другой стороны, модуль формирования пиков можно реализовать для работы по постоянным, а не дискретизированным по дискретному времени сигналам. Однако, в таком подходе необходимо, чтобы входной принятый сигнал 60 был также постоянным, а не дискретизированным сигналом.
В идеальном случае граничный сигнал 130 имеет легко идентифицируемые пики сигнала (фиг.1с и 6с), однако в действительности каждый пик сигнала фактически не отличается от нежелательных шумовых произведений выборок, лежащих в соседних символах. Так как модуль 110 формирования пиков постоянно формирует произведение между выборками, которые простираются поперек каждого принятого символа и задержанных относительно них выборок предшественника, граничный сигнал 130 включает в себя требуемые пики сигнала, а также шумовые сопряженные произведения. Например, первые αN (56) выборок в каждом символе в действительности перемножаются на последние αN выборок для получения необходимых αN выборок пика сигнала в течение определенной длительности. Однако оставшиеся N(1024) выборок перемножаются на N выборок из соседнего символа в ответ на задержку, которая задается ему с помощью схемы 115 задержки (смотри фиг.6). Эти дополнительные, нежелательные произведения имеют эффект заполнения шумом между появлениями необходимых пиков сигнала. Увеличение числа несущих, содержащих сигнал ОЧУ, приводит к соответствующему увеличению уровня этих шумовых произведений, присутствующих в граничном сигнале. Таким образом, шумовые произведения, соответствующие сигналам ОЧУ, которые содержат, например, от 80 и до 300 несущих могут быть значительными.
Фиг.7а графически изображает граничный сигнал 130, который соответствует сигналу ОЧУ из 1080 выборок. Ось Х соответствует числу выборок и, таким образом, указывает на синхронизацию, тогда как ось Y соответствует амплитуде выборки. На графике показана только действительная часть комплексного сигнала, так как мнимая часть является такой же. Ясно, что необходимый пик сигнала, который присутствует между выборками 2400 и 2500, незаметен на фоне вышеупомянутых шумовых произведений.
В дополнение к наличию вышеупомянутого шумового произведения в граничном сигнале 130 шум получают из других источников, хорошо известных в технике цифровой связи. Такой шум добавляется к сигналу во время его распространения через атмосферу за счет рассеяния, многолучевого распространения и замирания и помех сигнала.
Последующие этапы обработки в настоящем изобретении описаны, в частности, с целью подавления эффекта обесценивания вышеупомянутого шума по отношению к необходимым пикам сигнала в граничном сигнале 130 или, более конкретно, для повышения отношения сигнал/шум пиков сигнала, присутствующих в граничном сигнале 130. На выходе модуля 110 формирования пика предусмотрен модуль 135 усиления сигнала, который содержит схемы или модули усиления сигнала с первым и вторым каскадом. Схема усиления сигнала первого каскада является схемой или модулем 140 аддитивного наложения, а схема усиления второго каскада является согласованным фильтром 145, который предусмотрен на выходе схемы усиления первого каскада.
Схема 140 аддитивного наложения производит аддитивное наложение заданного числа пиков сигнала на их окружающие шумовые составляющие для того, чтобы повысить вероятность обнаружения пика сигнала за счет увеличения отношения сигнал/шум для пиков сигнала в граничном сигнале 130. Для того чтобы реализовать этот процесс аддитивного наложения, заданное число последующих сегментов граничного сигнала 130 налагаются первыми или перекрываются во времени. Каждый из этих наложенных сегментов содержит значение периода символа выборок сопряженного произведения, которые выводятся из модуля 110 формирования пиков, и включает в себя необходимый пик сигнала, окруженный нежелательными выборками шумового произведения.
После того, как заданное число или блок сегментов сигнала было перекрыто во времени, выборки произведения, занимающие заданное временное положение в наложенном наборе сегментов, накапливаются для образования выборки суммарного сигнала для этого заданного положения. Таким образом, формируется суммарный сигнал, содержащий выборку суммарного сигнала для каждого из заданных положений выборки, простирающихся поперек наложенных сегментов граничного сигнала.
Если, например, необходимо наложить 32 непрерывных сегмента граничного сигнала и если каждый сегмент включает в себя значение периода символа из 1080 выборок, то схема 140 аддитивного наложения производит 1080 суммарных выборок для каждого непрерывного блока из 32 сегментов (1080 выборок в сегменте), которые вводятся в него. Таким образом, сопряженные произведения из 32 сегментов (при этом каждый сегмент включает в себя 1080 выборок, пик сигнала и шум, который содержится в нем) аддитивно накладывают или "складывают" поверх друг друга путем точечного сложения наложенных сопряженных произведений из 32 сегментов. В этом процессе складывания произведения из 32 сегментов по существу поточечно добавляют к соответствующему периоду одного символа сопряженных произведений (или 1080 выборок), поверх 32 непрерывных символов, для того, чтобы получить сегмент суммарного сигнала, который содержит 1080 суммарных выборок. Затем обработка сигнала повторяется для следующего непрерывного блока из 32 сегментов граничного сигнала для того, чтобы получить другой сегмент суммарного сигнала, и так далее.
Сегмент суммарного сигнала, полученный путем аддитивного наложения заданного числа непрерывных сегментов граничного сигнала 130, включает в себя усиленный пик сигнала, который имеет повышенное отношение сигнал/шум относительно пиков сигнала в каждом из составных входных сегментов граничного сигнала. Причиной этого повышения является то, что наложение сегментов граничного сигнала выравнивает их соответствующие пики сигнала таким образом, что при накоплении сегментов каждый пик сигнала добавляется к следующему, таким образом получая выигрыш когерентной обработки, которая основывается на повторяющемся характере пиков граничного сигнала.
Тогда как выровненные, повторяющиеся пики сигнала в сегментах граничного сигнала когерентно накапливаются для формирования усиленного (суммарного) пика сигнала на выходе модуля 140 аддитивного наложения, напротив, случайная природа шумовых сопряженных произведений, окружающих пик сигнала в каждом из сегментов граничного сигнала, производит некогерентное сложение их в процессе аддитивного наложения. Так как пики сигнала складываются когерентно и окружающие шумовые продукты складываются некогерентно и, таким образом, усредняются, усиленный пик сигнала, который выводится из модуля 140 аддитивного наложения, в целом проявляет повышенное отношение сигнал/шум.
Выигрыш обработки и повышение отношения сигнал/шум, которое достигается с помощью модуля аддитивного наложения, увеличивается наряду с числом сегментов граничного сигнала, наложенных для того, чтобы получить сегмент суммарного сигнала. Недостатком в этом случае является соответствующие нежелательное увеличения задержки автоподстройки, так как большее количество сегментов граничного сигнала выбирают для получения пика суммарного сигнала. Таким образом, конкретное заданное число, например 32, обеспечивает баланс между этими двумя конкурирующими положительными факторами.
В математических терминах аддитивное наложение непрерывных сегментов сопряженных произведений, присутствующих в граничном сигнале 130, можно выразить следующим образом:

Важным аспектом предыдущей обработки сигнала является то, что синхронизация символа сохраняется на каждой из его следующих стадий: ввод символов ОЧУ в модуль 110 формирования пика, ввод сегментов граничного сигнала в схему 140 аддитивного наложения и вывод из нее сегментов суммарного сигнала, каждый из которых имеет период времени Тα (соответствующий N=1080 выборкам). Таким образом, ошибка синхронизации символа, которая проявляется путем позиционирования пиков сигнала в пределах сигнала, сохраняется повсюду.
На фиг.7b графически изображена временная диаграмма суммарного сигнала или, более конкретно, сегмент суммарного сигнала, который выводится из модуля 140 аддитивного наложения. На графике приведена действительная часть этого комплексного сигнала, так как мнимая часть подобна ей. Сегмент суммарного сигнала из 1080 выборок выражен в виде непрерывного блока из 32 входных сегментов граничного сигнала, каждый из которых имеет 1080 выборок. На фиг.7b усиленный пик 155 сигнала более четко отличается от окружающих накопленных шумовых составляющих, тогда как перед аддитивным наложением (фиг.7а) пик сигнала в сегменте граничного сигнала не различается из его окружающих шумовых составляющих.
Как показано на фиг.3, в процессе работы модуль 140 аддитивного наложения, модуль 160 суммирования и модуль 165 задержки цепи обратной связи совместно обеспечивают функции аддитивного наложения. То есть модуль 160 суммирования добавляет текущую входную выборку в результат накопления выборок в непрерывных символах, причем каждая из выборок временно размещается на периоде Тα символа (который соответствует 1080 выборкам). Задержка блока 165 дает задержку на период одного символа между накоплениями. С другой стороны, установлено, что каждый накопленный результат, который выводится с помощью модуля 160 суммирования, задерживается на 1 период Тα символа и затем направляется обратно в виде входного сигнала в модуль 160 суммирования, где он складывается со следующей входной выборкой. Процесс повторяется для всех входных выборок поперек каждого входного символа.
С другой стороны установлено, что первая суммарная выборка в сегменте суммарного сигнала представляет накопление всех первых выборок из всех 32 сегментов граничного сигнала. Вторая суммарная выборка представляет собой накопление всех вторых выборок из всех 32 сегментов граничного сигнала и так далее поперек сегмента суммарного сигнала.
Генератор 170 сброса подает сигнала сброса в модуль 165 задержки после того, как заданное число сегментов сигнала было накоплено для получения сегмента суммарного сигнала. Например, если заданное число сегментов граничного сигнала, который необходимо накопить, равно 32, генератор 170 сброса производит сброс в модуле 165 задержки по цепи обратной связи каждые 32 сегмента сигнала. В ответ на поступление команды сброса модуль 140 аддитивного наложения накапливает следующее заданное число непрерывных сегментов граничного сигнала.
Как описано ранее, выходной сигнал модуля 140 аддитивного наложения представляет собой суммарный сигнал, содержащий ряд сегментов суммарного сигнала, причем каждый сегмент включает в себя усиленный пик 155 сигнала. В условиях высокоинтенсивного шума усиленный пик 155 сигнала, хотя и проявляет повышенное отношение сигнал/шум, может все еще оставаться фактически неразличимым из окружающего шума. Таким образом, необходимо дополнительно повысить отношение сигнал/шум усиленного пика сигнала.
Для того, чтобы дополнительно повысить отношение сигнал/шум усиленного пика 155 сигнала, суммарный сигнал, который выводится из модуля 140 аддитивного наложения, вводится в согласованный фильтр 145. Временная импульсная характеристика согласованного фильтра согласована с формой или амплитудной огибающей усиленного пика сигнала, который вводится в него, и, в одном варианте осуществления настоящего изобретения, повторяет профиль квадратного корня из приподнятого косинуса. В частности, импульсная характеристика согласованного фильтра соответствует функции w(t), как показано на фиг.1d и определяется путем точечного перемножения первых αN выборок символа 5 на его последние αN выборки. Смотри фиг.1b и 1d.
Хотя несогласованный фильтр нижних частот можно использовать для сглаживания шума, присутствующего в суммарном сигнале, согласованный фильтр 145 обеспечивает оптимальное повышение отношения сигнал/шум для требуемого сигнала (усиленный пик 155 сигнала) при условии гауссова шума. Согласованный фильтр 145 реализован в виде цифрового фильтра с конечной импульсной характеристикой (КИР), который обеспечивает на его выходе фильтрованную версию комплексных выборок, поступающих в него. На фиг.7с изображена только действительная часть фильтрованного сигнала, который выводится из согласованного фильтра 145, так как мнимый сигнал подобен ему. Различимость усиленного пика сигнала на выходе согласованного фильтра (фиг.7с) явно улучшена по сравнению с различимостью усиленного пика сигнала на входе в согласованный фильтр (фиг.7b). Мнимая часть комплексного сигнала, который выводится из согласованного фильтра 145, аналогичным образом улучшена.
Подводя вкратце итог стадий обработки сигнала вплоть до выхода согласованного фильтра, модуль 110 формирования пика производит множество пиков сигнала, временные положения которых представляют собой граничные положения символа, которые представляют собой ошибку синхронизации символа для каждого принятого символа ОЧУ. Модуль 135 усиления сигнала увеличивает вероятность обнаружения пиков сигнала путем аддитивного наложения заданного числа сегментов входного сигнала для получения сегмента суммарного сигнала, имеющего в нем усиленный пик, и затем вторую, согласованную фильтрацию сегмента суммарного сигнала для получения сегмента суммарного, согласованного с помощью фильтра сигнала, который оптимальным образом готов для последующей обработки путем обнаружения пика. Этот процесс непрерывно действует для того, чтобы получить множество пиков фильтрованного усиленного сигнала на выходе модуля 135 усиления сигнала. Временные положения этих пиков фильтрованного усиленного сигнала в пределах сегментов суммарного сигнала прошедшего операцию согласованной фильтрации, которая выводится из модуля 135 усиления сигнала, показывают граничные положения символа или ошибку синхронизации символа ОЧУ.
Взятый в отдельности, и особенно в комбинации, модуль аддитивного наложения и согласованный фильтр преимущественно повышают вероятность обнаружения пика сигнала в настоящем изобретении. Их ввод, следующий за стадией формирования пика, позволяет эффективно использовать сигнал ОЧУ, содержащий большое число несущих, и он работает в условиях распространяющегося шумового сигнала.
Следующая стадия обработки сигнала, которая требуется для установления ошибки синхронизации символа, заключается в обнаружении временного положения пика сигнала, который выводится из модуля 135 усиления сигнала. Временное положение пика сигнала представляет собой в действительности индекс выборки или номер выборки усиленного пика сигнала внутри сегмента, фильтрованного суммарного сигнала, который выводится из согласованного фильтра.
Фильтрованный комплексный сигнал 175, который выводится из согласованного фильтра 145, подается на вход модуля 190 селектора пиков, который обнаруживает усиленный пик фильтрованного сигнала и временное положение или его индекс выборки. В процессе работы генератор 195 величин, возведенных в квадрат, селектор 190 пиков возводит в квадрат значения выборок комплексного сигнала, которые вводятся в него для выработки временной формы сигнала на его выходе (фиг.7d). Выходной сигнал генератора 195 величин, возведенных в квадрат (фиг.7d), подает сигналы на вход искателя 200 пиков, который проверяет величины выборок, которые вводятся в него, и идентифицируют временное положение или индекс выборки, соответствующий пику сигнала.
Это временное положение пика сигнала обеспечивается по существу в виде ошибки синхронизации символа, которая подается с помощью модуля 75 автоподстройки на вход схемы 70 временной коррекции символа. Следует оценить, что временное положение, обеспеченное в виде ошибки синхронизации t, может потребовать небольшие регулировки для компенсации задержек при различной обработке, которые вводятся на предыдущих стадиях обработки сигнала. Например, задержки при инициализации в подстроечных фильтрах и так далее могут вносить задержки, которые необходимо калибровать для оценки конечной ошибки синхронизации. Однако при реализации такие задержки являются небольшими.
После определения временного положения пика сигнала (для установления ошибки синхронизации символа) на следующей стадии обработки сигнала необходимо определить фазовую ошибку несущей и ошибку, соответствующую частоте несущей принятого сигнала ОЧУ. При согласованной фильтрации усиленный пик сигнала в комплексном сигнале 175 представляет самую четкую точку или точку максимального отношения сигнал/шум, в которой определяют фазовую ошибку несущей и ошибку по частоте. Фаза комплексной выборки в этом положении пика указывает на ошибку по частоте, которая существует между передатчиком и приемником, так как сопряженное произведение в этой точке, которое было сформировано с помощью модуля 110 формирования пика, должно иметь выходное значение с нулевой фазой при отсутствии ошибки по частоте несущей. Сопряженное произведение в этой точке пика сигнала и фактически в каждой другой точке пика сигнала должно производить значение с нулевой фазой, потому что математически сопряженное произведение между выборками символа, которые имеют эквивалентную фазу (когда производят выборки в передней и задней частях каждого принятого символа), устраняет фазу при отсутствии ошибки по частоте несущей. Любая остаточная фаза, присутствующая в пике сигнала, который выходит из согласованного фильтра, пропорциональна ошибке по частоте несущей, и ошибка по частоте является простой для вычисления сразу после определения остаточной фазы.
Математически ошибка Δf по частоте несущей производит сдвиг разностной фазы 2πΔfT между выборками в передней и задней частях символа ОЧУ, который формирует сопряженную составляющую. Таким образом, ошибка по частоте выражается с помощью следующего уравнения:
Δf=Arg(Gmax)/27πT,
где Gmax - пик на выходе согласованного фильтра, и Arg обозначает аргумент (фазу) комплексного числа (комплексной выборки) в пике сигнала. Функция Arg эквивалентна арктангенсу четвертого квадранта. Так как арктангенс не позволяет обнаружить углы за пределами окна 2π, оценка частоты является двухзначной вплоть до интервала канала, кратного 1/Т. Тем не менее, эта оценка ошибки по частоте вместе с оценкой ошибки синхронизации, которая выполняется путем определения местоположения пика сигнала, достаточна для того, чтобы разрешить начало демодуляции символа. Когда демодуляция продолжается, последующая обработка границы кадра приемника (не является частью настоящего изобретения) разрешает неоднозначность по частоте.
На фиг.3 показано, что комплексный сигнал 175, прошедший согласованную фильтрацию, и временное положение или индекс выборки подаются на вход блока 205 извлечения фазы. Блок 205 извлекает разностную фазу из комплексной выборки, представляющей усиленный пик сигнала, который выводится из согласованного фильтра. Извлеченная фаза подается на вход генератора 210 частоты, который просто масштабирует извлеченную фазу, которая вводится в него, для получения ошибки Δf частоты несущей, которая затем подается с помощью модуля 75 автоподстройки в схему 65 частотной коррекции. Таким образом, временное положение пика фильтрованного сигнала на выходе согласованного фильтра 145 показывает ошибку синхронизации символа, и из фазы этого пика сигнала получают ошибку по частоте несущей.
В итоге способ настоящего изобретения для устранения ошибки синхронизации символа и ошибки по частоте несущей из сигнала ОЧУ содержит следующие операции:
принимают модулированный сигнал ОЧУ, представляющий ряд символов ОЧУ, причем каждый символ ОЧУ включает в себя переднюю и заднюю части, при этом передняя и задняя части имеют по существу эквивалентные фазы и имеют взвешенные по времени амплитуды, соответствующие заданной функции временного взвешивания,
формируют граничный сигнал, состоящий из множества пиков сигнала, представляющих граничное положение символа для каждого принятого символа ОЧУ, причем каждый пик сигнала формируется в ответ на соответствие амплитуды и фазы, полученной между передней и задней частями каждого принятого символа ОЧУ,
усиливают сигнал для повышения вероятности обнаружения пика сигнала граничного сигнала путем аддитивного наложения множества сегментов граничного сигнала для того, чтобы повысить отношение сигнал/шум каждого из множества пиков усиленного сигнала, полученных при усилении,
устанавливают временное положение границы символа по меньшей мере одного из пиков усиленного сигнала, при этом это временное положение представляет собой ошибку синхронизации символа принятого сигнала ОЧУ, и устраняют ошибку по частоте несущей принятого сигнала ОЧУ, соответствующую ранее установленному временному положению.
При операции усиления сигнала для повышения вероятности обнаружения пика граничного сигнала пики усиленного сигнала, полученные с помощью аддитивного наложения множества сегментов граничного сигнала проходят согласованную фильтрацию, таким образом, дополнительно повышая отношение сигнал/шум множества пиков усиленного сигнала, полученных при операции усиления.
Предыдущий способ и устройство для обнаружения или устранения ошибки синхронизации символа и ошибки по частоте несущей из принятого сигнала ОЧУ обеспечивают устранение большей части основной, неограниченной ошибки синхронизации символа и ошибки по частоте несущей. Как показано на фиг.4, во втором варианте осуществления модуля 75 автоподстройки представлена более устойчивая система для устранения ошибки синхронизации символа и ошибки по частоте несущей, но при затратах на дополнительную обработку сигнала.
Второй вариант осуществления модуля 75 автоподстройки включает в себя особенности обработки сигнала, которые обращены конкретно к проблемам, связанным с замиранием сигнала и помехам. В благоприятных условиях, при отсутствии существенного замирания, многолучевого распространения и помех пики фильтрованного усиленного сигнала, которые выводятся из согласованного фильтра 145 модуля 135 усиления сигнала, каждый точно показывает граничное положение принятого символа и, соответственно, ошибку синхронизации принятого символа. В этих условиях одиночный пик обнаруженного сигнала, который выводится из согласованного фильтра 145, обеспечивает необходимую информацию, которая позволяет успешно приводить демодуляцию символов с помощью демодулятора 100 ОЧУ.
С другой стороны, в условиях шума многолучевое распространение и помехи обладают эффектом возникновения дополнительных ложных пиков сигнала или устранения действительных пиков сигнала на выходе согласованного фильтра. Дополнительная обработка сигнала, представленная с помощью второго варианта осуществления модуля 75 автоподстройки, устраняет эти паразитные эффекты путем подтверждения временного постоянства пиков усиленного сигнала на выходе модуля 135 усиления сигнала. Если пики усиленного сигнала являются действительными, то есть устойчивыми во времени, то в соответствии с определенными критериями полученная ошибка синхронизации символа и ошибка по частоте несущей рассматриваются как правильные, и может начаться демодуляция сигналов ОЧУ. С другой стороны, процесс обнаружения продолжается до тех пор, пока не будет подтверждена правильность ошибки синхронизации символа.
Как показано на фиг.4, второй вариант осуществления модуля 75 автоподстройки включает в себя модуль 110 формирования пика и модуль 135 усиления сигнала, так как предварительная стадия обработки сигнала подобна первому варианту осуществления модуля 75 автоподстройки. Однако последующие стадии обработки сигнала добавлены для подтверждения временного постоянства принятого сигнала. Сигнал 175, который выводится из модуля 135 усиления сигнала, подается на вход фильтра 215 с бесконечной импульсной характеристикой (БИХ), который осуществляет фильтрацию сигнала, который вводится в него, и обеспечивает подачу БИХ-фильтрованного сигнала 220 на его выход. Импульсная характеристика фильтра БИХ является такой, что большинство последних принятых сигналов, которые вводятся в него, имеют больший вес, чем ранее принятые сигналы, которые вводятся в него. Таким образом, большинство ранее фильтрованных пиков усиленного сигнала, которые вводятся в фильтр 215 БИХ, имеют больший вес на его выходе.
В частности, комплексный сигнал 175, который вводится в фильтр 215 БИХ, содержит непрерывные блоки сегментов суммарного сигнала Nα выборок. Фильтр 215 БИХ осуществляет фильтрацию первой выборки первого блока с первыми выборками последующих блоков для того, чтобы получить фильтрованную первую выборку. Аналогичным образом вторая выборка первого блока фильтруется со вторыми выборками последующих блоков для того, чтобы получить фильтрованную вторую выборку и так далее, для того, чтобы получить выходной БИХ-фильтрованный блок сегментов суммарного сигнала Nα БИХ-фильтрованных выборок. Таким образом, фильтр 215 БИХ можно рассматривать как блок Nα фильтров БИХ, работающих параллельно, при этом параллельные фильтры осуществляют фильтрацию выборок, занимающих одинаковое заданное положение внутри каждого из смежных блоков сегментов суммарного сигнала, содержащих Nα входных выборок.
При более подробном рассмотрении внутри фильтра 215 БИХ находятся блок 225 умножения на коэффициент первого каскада для умножения на коэффициент выборок фильтрованного, комплексного сигнала 175, и затем накопитель 230, который накапливает взвешенные выборки, выводимые с помощью блока 225 умножения на коэффициент, и задержанные, взвешенные выборки, которые выводятся с помощью схемы 240 задержки цепи обратной связи. Блок 235 умножения на коэффициент второго каскада, который взвешивает накопленные выходные выборки на заданный множитель 1-а, и схема 240 задержки цепи обратной связи совместно обеспечивают функции фильтра БИХ, хорошо известные в технике фильтров БИХ. Однако необходимо оценить, что временная задержка, которая передается выборкам по цепи обратной связи с помощью схемы 240 задержки цепи обратной связи, соответствует суммарному периоду или длительности заданного числа граничных сегментов сигнала, которые аддитивно накладываются с помощью модуля 140 аддитивного наложения. Например, там, где аддитивно накладывается блок из 32 сегментов, задержка на 1 блок, которую обеспечивает схема 240 задержки, составляет 32×Т (период символа выборки Nα=1080).
БИХ-фильтрованный сигнал 220 на выходе фильтра 215 БИХ, подобный фильтрованному, комплексному сигналу 175, который вводится в фильтр БИХ, содержит выборки комплексного сигнала, простирающиеся поперек смежных сегментов БИХ-фильтрованных накопленных сигналов, причем каждый сегмент имеет полный период Тα символа и включает в себя пик сигнала. Таким образом, синхронизация символа продолжается и сохраняется на выходе фильтра БИХ.
Селектор 245 пиков, работающий подобно описанному ранее селектору 190 пиков, устанавливает временное положение каждого пика БИХ-фильтрованного сигнала, который поступает в него, и подает это временное положение или индекс выборки в логический модуль 255 подтверждения. При подтверждении это временное положение используется в качестве ошибки Δt синхронизации символа, и фаза, которая определяется в подтвержденном пике сигнала, который выводится из фильтра БИХ, используется для определения ошибки по частоте несущей с помощью способа, описанного ранее со ссылкой на фиг.3.
Комплексный сигнал 175 дополнительно подается в качестве входного сигнала в селектор 260 пиков, который устанавливает временное положение усиленного пика сигнала, присутствующего в текущем накопленном сегменте сигнала 175. Этот текущий накопленный сегмент сигнала представляет собой накопление самого последнего принятого блока наложенных граничных сегментов сигнала. Текущее временное положение подается на вход логического модуля 255 подтверждения правильности.
Дополнительно к подаче текущего временного положения на вход логического модуля 255 подтверждения предыдущее временное положение, то есть временное положение усиленного пика сигнала в накопленном сегменте сигнала, который непосредственно предшествует текущему накопленному сегменту сигнала, формируется и подается в качестве входного сигнала в логический модуль 255 подтверждения. Этот непосредственно предшествующий или предыдущий накопленный сегмент сигнала и предыдущий усиленный пик сигнала представляет собой накопление блока граничных сегментов сигнала, непосредственно предшествующих самому последнему принятому блоку. Как установлено в других случаях и посредством конкретного примера, текущее временное положение представляет собой усиленный пик сигнала для самого последнего принятого соседнего блока из 32 наложенных граничных сегментов сигнала, хотя предыдущее временное положение является представителем непосредственно предшествующих 32 наложенных граничных сегментов сигнала.
Предыдущее временное положение формируется путем внесения временной задержки в настоящее временное положение. Временная задержка соответствует накопленному периоду одного блока (заданного числа) граничных сегментов сигнала, которые аддитивно накладываются для формирования накопленного сегмента сигнала. В вышеприведенном примере эта временная задержка соответствует 32×Тα (период символа выборки Nα=1080). Схема 265 задержки обеспечивает необходимую задержку в текущем временном положении, которая вводится в нее, и обеспечивает на своем выходе предыдущее временное положение, то есть затем вводится в логический модуль 255 подтверждения правильности.
Подводя краткий итог вышесказанному, следующий набор временных положений подается в качестве входных сигналов в логический модуль 255 подтверждения правильности:
1) Временное положение, соответствующее положению БИХ-фильтрованного пика сигнала в самом последнем представленном БИХ-фильтрованном сегменте сигнала (выходной сигнал фильтра БИХ);
2) Текущее временное положение, соответствующее положению пика сигнала в самом последнем представленном накопленном сегменте сигнала; и
3) Предыдущее временное положение, соответствующее положению пика сигнала в непосредственно предшествующем накопленном сегменте сигнала.
Логический модуль 255 подтверждения выполняет заданную временную или позиционную корреляцию между входными сигналами, которые подаются в него для того, чтобы установить, являются ли правильными во времени пики сигнала, которые выводятся с помощью фильтра БИХ (как показано на выходе селектора 245 пиков). В частности, логический модуль 255 подтверждения определяет, выровнены ли текущие и предыдущие положения пиков сигнала внутри заданного числа выборок, например 10 выборок, по отношению к положению БИХ-фильтрованного пика сигнала. Если они выровнены, то временное положение БИХ-фильтрованного пика сигнала определяется правильным и используется для синхронизации символа. Кроме того, подтвержденный БИХ-фильтрованный пик сигнала, соответствующий этому подтвержденному временному положению, используется для определения ошибки по частоте несущей тем же самым способом, который был описан ранее с использованием блока 270 извлечения фазы и генератора 275 частоты (фиг.4).
Как показано на фиг.2 и 4, после того, как было подтверждено временное положение, логический модуль 255 подтверждения модуля 75 автоподстройки показывает такое подтверждение для управления и слежения за модулем 85 посредством сигнала 80 состояния автоподстройки. В свою очередь, модуль 85 управления и слежения через управляющий сигнал 90 демодулятора разрешает процесс демодуляции, который выполняется с помощью демодулятора 100 ОЧУ. Разбивается ли логический модуль 255 подтверждения правильности на части для того, чтобы он был внутри модуля 75 автоподстройки или внутри модуля 85 управления и слежения, и разрешен ли конкретный механизм, на основе которого действует демодулятор 100 ОЧУ или демодуляция, полученная с помощью него, не важно для специфики настоящего изобретения. Во втором варианте осуществления модуля 75 автоподстройки является важным, чтобы процесс автоподстройки был действительным, таким образом, показывающим успешную автоподстройку ошибки синхронизации символа и ошибки по частоте несущей, что является необходимым условием для получения демодулированных данных, которые выводятся из демодулятора 100 ОЧУ в виде оптимально демодулированных данных.
В случае, когда логический модуль 255 подтверждения не позволяет подтвердить временное положение БИХ-фильтрованного пика сигнала, процесс автоподстройки продолжается до тех пор, пока не произойдет подтверждение правильности ошибки синхронизации символа.
Дополнительная обработка сигнала, которая выполняется во втором варианте осуществления модуля автоподстройки настоящего изобретения гарантирует демодуляцию принятого сигнала ОЧУ только после успешного устранения ошибки синхронизации символа и ошибки по частоте несущей из принятого сигнала. При наличии рассеяния сигнала, многолучевого распространения и других явлений помех сигнала второй вариант осуществления обеспечивает уровень достоверности, при котором демодулятор принятого символа в приемнике обеспечивает подачу правильно демодулированных данных на его выход.
При снабжении приемника дополнительными функциями, которые позволяют использовать частотно-разнесенную селекцию и комбинирование между избыточно переданными и принятыми сигналами, дополнительно повышается способность приемника настоящего изобретения осуществлять борьбу с вышеупомянутыми паразитными эффектами, которые возникают при распространении сигнала. В третьем варианте осуществления настоящего изобретения выполнена такая система с разнесением для устранения ошибки синхронизации символа и ошибки по частоте несущей из разнесенного сигнала ОЧУ.
Модулятор ОЧУ, предусмотренный в выходном каскаде передатчика системы с разнесением третьего варианта осуществления, работает таким же образом, как и модуль 25 модулятора ОЧУ, который обсужден по отношению к первому варианту осуществления настоящего изобретения, за исключением того, что на его выходе формируется разнесенный сигнал ОЧУ. В частности, передатчик вырабатывает и передает в приемник системы с разнесением третьего варианта осуществления модулированный сигнал ОЧУ на верхней и нижней боковой полосе частот, причем каждая боковая полоса охватывает множество модулированных несущих частот ОЧУ (фиг.1а), и при этом боковые полосы совместно образуют последовательность составных символов ОЧУ так, как показано на фиг.1b.
Этот разнесенный сигнал ОЧУ передается с помощью передатчика разнесенных сигналов ОЧУ в приемник разнесенных сигналов ОЧУ тем же самым способом, который описан по отношению к первому варианту осуществления настоящего изобретения. Однако необходимо оценить, что в этом третьем варианте осуществления приемник с разнесением включает модуль автоподстройки для верхней и нижней боковой полосы частот и дополнительную обработку сигнала, которая требуется для осуществления выбора разнесенных сигналов и комбинирования между этими двумя случаями.
Как показано на фиг.5, в третьем варианте осуществления настоящего изобретения приемник с разнесением включает в себя модуль приемника для предварительной обработки сигнала (не показан), который обеспечивает подачу принятого аналогового сигнала ОЧУ на вход АЦП 295. Дискретизированный сигнал, который выводится из АЦП 295, подается на вход блока 300 разделения боковых полос, который осуществляет полосовую фильтрацию верхней и нижней боковых полос частот, присутствующих в принятом сигнале, для подачи сигнала 305 верхней боковой полосы и сигнала 310 нижней боковой полосы на его соответствующие выходы. Сигнал 305 верхней боковой полосы подается в качестве входного сигнала в модуль 315 автоподстройки на верхней боковой полосе, тогда как сигнал 310 нижней боковой полосы подается в качестве входного сигнала в модуль 320 автоподстройки на нижней боковой полосе. Кроме того, оба сигнала 305 и 310 подаются соответственно, по меньшей мере, в одну схему приемника, такую как, по меньшей мере, одна схема коррекции и/или демодулятора и т.д.
Вплоть до этой точки обработка сигнала, которая представлена с помощью АЦП 295, блока 300 разделения боковых полос (полосовые фильтры) и соответственно задействованных модулей 315, 320 автоподстройки, по существу повторяется обработка сигнала, описанная по отношению к первому и второму вариантам осуществления настоящего изобретения, за исключением того, что присутствуют оба канала верхней и нижней боковых полос. С другой стороны, в третьем варианте осуществления установлено, что каждая верхняя и нижняя боковые полосы частот подвергаются стадиям обработки сигнала, которые описаны ранее. Кроме того, различные сигналы, проходящие между различными стадиями обработки сигнала, имеют одинаковые характеристики, которые были описаны ранее. Таким образом, по отношению к модулям автоподстройки верхней и нижней боковых полос приводится только краткое описание тех аспектов, которые охватывают более раннее описание.
Как показано на фиг.5, сигнал 305 верхней боковой полосы подвергается последовательно обработке сигнала с помощью модуля 325U обработки пика, который включает в себя модуль формирования пика и модуль усиления сигнала, описанные ранее, и модуль 330U фильтра БИХ, который обеспечивает подачу БИХ-фильтрованного пика сигнала на его выход для последующего ввода в селектор 335U пиков.
Входными сигналами для логического модуля 34OU подтверждения верхней боковой полосы являются следующие сигналы:
1) временные положения, представляющие БИХ-фильтрованные пики сигнала, которые выводятся из селектора 335U пиков;
2) текущие временные положения 345U пиков сигнала, соответствующие текущим блокам смежных сегментов сигнала, которые дополнительно накладываются с помощью модуля 325U обработки пиков; и
3) предыдущие временные положения 350U пиков сигнала, соответствующие предыдущим блокам смежных сегментов сигнала, которые выводятся из модуля 325U пиков.
Так как модули обработки сигнала, которые вырабатывают сигналы 345U и 350U были описаны ранее со ссылкой на фиг.4, то они дополнительно не воспроизводятся здесь и таким образом пропущены на фиг.5 в целях упрощения и ясности описания.
Модуль 340U подтверждения верхней боковой полосы работает тем же самым образом, как и описанный ранее аналогичный модуль по отношению ко второму варианту осуществления настоящего изобретения (фиг.4), и обеспечивает подачу сигнала 355U состояния автоподстройки на верхней боковой полосе на его выходе в ответ на позиционную корреляцию между временными положениями на своих трех входах. Сигнал 355U состояния автоподстройки на верхней боковой полосе подается в модуль 370 логической схемы сложения разнесенных сигналов.
Модуль 315 автоподстройки на верхней боковой полосе дополнительно обеспечивает подачу оценки Δtu синхронизации символа на верхней боковой полосе в модуль 370 логической схемы сложения разнесенных сигналов. Ошибку Δfu частоты несущей получают с помощью модуля 367U в соответствии с ранее описанными методами. В частности, ошибку получают с помощью модуля 367U, который включает в себя блок извлечения фазы и генератор частоты, реагирующий на БИХ-фильтрованный сигнал 360U и оценку Δtu синхронизации, которая вводится в него.
Описав вкратце работу модуля 315 автоподстройки на верхней боковой полосе, можно оценить, что обработка сигнала, которая выполняется с помощью модуля 320 автоподстройки на нижней боковой полосе, продолжается по существу эквивалентным способом, как и для верхней боковой полосы. В частности, как и между двумя боковыми полосами, эквивалентные с точки зрения работы модули обработки сигнала имеют одинаковые обозначения на фиг.5; нижний индекс ″U″ обозначает верхнюю боковую полосу и нижний индекс ″L″ обозначает нижнюю боковую полосу.
Модуль 320 автоподстройки на нижней боковой полосе обеспечивает подачу оценки ΔtL синхронизации символа и сигнал Δfu коррекции ошибки по частоте несущей в модуль 370 логической схемы сложения разнесенных сигналов. Кроме того, логический модуль 340L подтверждения для нижней боковой полосы обеспечивает подачу сигнала 355L состояния автоподстройки на нижней боковой полосе в модуль 370 логической схемы сложения разнесенных сигналов.
Приемник с разнесением дополнительно включает в себя схему 385 сложения разнесенных сигналов, предназначенную для сложения соответствующих БИХ-фильтрованных выборок, которые выводятся из фильтров 330U, 330L БИХ модулей 315, 320 автоподстройки на верхней и нижней боковых полосах. Полученный в результате суммарный сигнал вводится в селектор 390 пиков, который работает по существу тем же самым образом, как и селектор пиков, описанный ранее. Суммарная ошибка Δtc синхронизации символа выводится из селектора 390 суммарных пиков, а суммарная ошибка Δfc по частоте несущей получается и выводится с помощью модуля 392, причем оба эти сигнала подаются в качестве входных сигналов в модуль 370 логической схемы сложения разнесенных сигналов. Следует оценить, что с помощью суммарных сигналов верхней и нижней боковых полос, как и с помощью схемы 385 сложения разнесенных сигналов, можно достигнуть дополнительного выигрыша при обработке, который, таким образом, приводит к дополнительной точности при оценке ошибки синхронизации символа и ошибки по частоте несущей так, как представлено соответственно с помощью Δtc и Δfc.
Как показано на фиг.5, приемник с разнесением включает в себя модуль 370 логической схемы сложения разнесенных сигналов, на вход которого поступают следующие сигналы:
1) сигналы 355U и 355L состояния верхней и нижней боковых полос;
2) ошибки синхронизации Δtu и ΔtL, символов верхней и нижней боковых полос;
3) ошибки Δfu и ΔfL, по частоте несущей верхней и нижней боковых полос; и
4) суммарная ошибка Δtc синхронизации символа и суммарная ошибка Δfc по несущей частоте.
При подаче этих входных сигналов модуль 370 логической схемы сложения разнесенных сигналов формирует на своих выходах разнесенный сигнал 375, ошибку Δt синхронизации и ошибку Δf по частоте несущей. Сигнал 375 состояния разнесения подается в качестве входного сигнала в модуль 380 контроллера приемника с разнесением, тогда как ошибка синхронизации и ошибка по частоте несущей подаются в модуль обработки демодуляции для коррекции синхронизации и частоты, как описано ранее.
Модуль 370 логической схемы сложения разнесенных сигналов обеспечивает обработку разнесенного суммарного сигнала, которая требуется для выбора соответствующей пары сигналов, состоящей из ошибки синхронизации символа и соответствующей ошибки по частоте несущей, из модуля автоподстройки верхней или нижней боковых полос частот, или из их комбинации (пары объединенных сигналов), или, в качестве возможного случая, для определения необходимости дальнейшей автоподстройки. Модуль 370 по существу служит в качестве "интеллектуального" мультиплексора для условного выбора между тремя парами ошибки синхронизации символа и ошибки по частоте несущей, которые вводятся в него, для его вывода t и f.
При работе приемника с разнесением каждая боковая полоса приемника, включая модули автоподстройки верхней и нижней боковых полос, работают в основном независимо друг от друга. Каждый из логических модулей 340U и 340L подтверждения работают так, как описано во втором варианте осуществления (фиг.4), обеспечивая подачу в качестве выходных сигналов их соответствующие сигналы 355U и 355L состояния автоподстройки. То есть, логический модуль 340U подтверждения верхней боковой полосы подтверждает ошибку синхронизации символа верхней боковой полосы частот, который представлен с помощью временных положений, которые выводятся с помощью селектора 335U пиков, и логический модуль 340L подтверждения нижней боковой полосы подтверждает правильность ошибки синхронизации нижней боковой полосы частот, представленной с помощью временных положений пиков сигнала, которые выводятся из селектора 335L пиков.
Как показано на фиг.8, на которой изображена логическая схема принятия решения и выбора (мультиплексирования), выполненная на основе модуля 370 логической схемы сложения разнесенных сигналов, модуль 370 выполняет следующие операции принятия решения (подтверждения), и, в ответ на это, выбирает следующие ошибку синхронизации символа и ошибку по частоте несущей для вывода из него:
1) ошибку Δtu синхронизации символа верхней боковой полосы и ошибку Δfu по частоте несущей выбирают в процессе демодуляции, если сигнал 355U состояния автоподстройки верхней боковой полосы указывает на правильность ошибки синхронизации символа верхней боковой полосы, и сигнал 355L состояния автоподстройки нижней боковой полосы указывает на неправильность ошибки синхронизации символа нижней боковой полосы (фиг.8, блок 500 и 505);
2) ошибку ΔtL синхронизации символа нижней боковой полосы и ошибку ΔfL по частоте несущей выбирают в процессе демодуляции, если сигнал 355L состояния автоподстройки нижней боковой полосы указывает на правильность ошибки синхронизации символа нижней боковой полосы, и сигнал 355U состояния автоподстройки верхней боковой полосы указывает на неправильность ошибки синхронизации символа верхней боковой полосы (фиг.8, блоки 510 и 515);
3) если ошибки синхронизации символов верхней и нижней боковых полос подтверждаются, то модуль 370 логической схемы сложения разнесенных сигналов определяет, существует ли заданная временная корреляция между подтвержденными ошибками синхронизации символа верхней и нижней боковых полос. То есть если ошибки синхронизации символов верхней и нижней боковых полос находятся в пределах заданного числа выборок друг друга, например 10 выборок, то суммарную ошибку Δtc синхронизации символа, которая устанавливается на выходе селектора 390 пиков, и суммарную ошибку Δfc по частоте несущей, которая устанавливается на выходе модуля 392, выбирают в течение процесса демодуляции (фиг.8, блоки 520, 525 и 530);
4) если ошибки синхронизации символов верхней боковой полосы и нижней боковой полосы подтверждаются (как и в предыдущей операции), но ошибки синхронизации символов верхней и нижней боковых полос не коррелированы по времени или ни одна из ошибок синхронизации сигнала боковой полосы не подтверждается (в соответствии с предыдущей операцией), то не выбирается ни ошибка синхронизации символа, ни любая ошибка по частоте несущей, и процесс автоподстройки продолжается (фиг.8, блоки 520, 525 и 535).
Так как пик суммарного сигнала формируется в виде аддитивной комбинации коррелированных во времени пиков сигналов верхней и нижней боковых полос и так как временные положения этих пиков сигналов верхней и нижней боковых полос известны, то временное положение пика суммарного сигнала должно обязательно находиться внутри заданного диапазона положений, которые относятся к пикам их составного сигнала. Таким образом, селектор 390 пиков должен только осуществлять поиск внутри этого заданного диапазона положений, то есть 50 выборок на любой стороне временного положения верхней или нижней боковых полос, для того, чтобы найти и установить временное положение пика суммарного сигнала. При ограничении диапазона поиска время обработки и время подстройки уменьшается и, таким образом, увеличивается в целом эффективность процесса.
Модуль 370 логической схемы сложения разнесенных сигналов можно реализовать в виде дискретной цифровой логики (И, ИЛИ, ИЛИ-НЕ, Исключающее ИЛИ и так далее), логической схемы в виде вентильной матрицы, модулей программного обеспечения, работающих на процессоре, комбинации из вышеупомянутых устройств или с использованием любого другого известного подхода. Кроме того, необходимо оценить, что в настоящем изобретении конкретное разделение на части по логической функциональности между логическими модулями подтверждения верхней и нижней боковых полос и модулем логической схемы сложения разнесенных сигналов приведено в качестве примера. Можно использовать любое альтернативное размещение при условии, что в целом сохраняются логические функции подтверждения и выбора.
Подводя вкратце итог работы модуля 370, если только одна из боковых полос имеет подтвержденную ошибку синхронизации символа, она используется для демодуляции. С другой стороны, если каждая боковая полоса имеет подтвержденную ошибку синхронизации символа и эти подтвержденные ошибки синхронизации символа коррелированы во времени в соответствии с заданными критериями, то БИХ-фильтрованные выборки сигнала, взятые из каждой боковой полосы, складываются, и синхронизация символа, которая вырабатывается из них, то есть ошибка синхронизации суммарного сигнала и ошибка по частоте, выбирается в процессе демодуляции. С другой стороны, если подтверждается каждая боковая полоса, но боковые полосы не коррелированы во времени друг с другом, или если не подтверждается боковая полоса, то ошибка синхронизации символа не выбирается и автоподстройка продолжается.
На протяжении всего этого процесса контроллер 380 приемника с разнесением осуществляет необходимое управление схемами приемника для управления его работой в соответствии с выходными сигналами 375 выбора, которые вырабатываются с помощью модуля 370 логической схемы сложения разнесенных сигналов.
В итоге способ разнесения сигналов настоящего изобретения для устранения ошибки синхронизации символа и ошибки по частоте несущей из сигнала ОЧУ содержит операции, в соответствии с которыми:
передают модулированный сигнал ОЧУ на верхней и нижней боковых полосах частот, причем каждая из боковых полос охватывает множество частотно-модулированных несущих ОЧУ и последовательность символов ОЧУ,
принимают модулированный сигнал ОЧУ верхней боковой полосы частот и обеспечивают вывод первого (верхняя боковая полоса) принятого сигнала и модулированного сигнала ОЧУ нижней боковой полосы частот и обеспечивают вывод второго (нижняя боковая полоса) принятого сигнала,
формируют первую (верхняя боковая полоса) ошибку синхронизации символа и ошибку по частоте, соответствующие символам ОЧУ в первом принятом сигнале,
формируют вторую (нижняя боковая полоса) ошибку синхронизации символа и ошибку по частоте, соответствующие символам ОЧУ во втором принятом сигнале,
подтверждают правильность первой ошибки синхронизации символа на основании ее заданного постоянства во времени,
подтверждают правильность второй ошибки синхронизации символа на основании ее заданного постоянства во времени,
выбирают оптимальную ошибку синхронизации символа из первой и второй ошибок синхронизации символа в ответ на операции подтверждения, и
демодулируют последовательность символов ОЧУ, по меньшей мере, из боковых полос с использованием оптимальной ошибки синхронизации символа.
Способ также включает в себя операции формирования третьей (суммарной) ошибки синхронизации символа, соответствующей комбинации первого и второго сигналов синхронизации, представляющих соответственно первую и вторую ошибки синхронизации символа, и
выбирают третью ошибку синхронизации символа в качестве оптимальной синхронизации символа в ответ на заданные условия синхронизации.
Комбинированная структура и методология разнесения, которые были описаны выше, обеспечивают устойчивую систему автоподстройки приемника, в которой можно успешно восстановить синхронизацию символа и частоту несущей даже в случае, когда полностью вся боковая полоса блокируется в результате затенения или помех. С другой стороны, при сложении сигналов верхней и нижней боковых полос с помощью схемы 385 сложения разнесенных сигналов можно получить дополнительный выигрыш при обработке сигналов в случае, когда используется объединенная синхронизация символа (выход селектора 390 пиков).
На всем протяжении предыдущего подробного описания настоящего изобретения, различные модули обработки сигнала работают с принятым, дискретизированным сигналом ОЧУ, который содержит последовательность символов ОЧУ. Важно отметить, что модулятор ОЧУ, а не приемник, который устанавливает заданное число выборок в каждом символе, например 1080 выборок, используется в иллюстративных целях. Частота дискретизации в приемнике, определяемая в АЦП 50, который, в свою очередь, устанавливает действительное число принятых символов для каждого принятого символа, устанавливается на основании множества критериев, которые не важны для характерных особенностей настоящего изобретения, включая, например, критерии Найквиста и так далее. АЦП 50 может либо недо- либо передискретизировать принятые символы при установлении числа принятых выборок на символ, или альтернативно, может вырабатывать то же самое число выборок на символ в приемнике так, как было установлено в модуляторе.
Важным обстоятельством при обработке сигнала настоящего изобретения является то, что синхронизация символа будет сохраняться на каждой соответствующей стадии обработки. До тех пор, пока каждая стадия обработки будет основывается на значении периода символа, или его перемножении, принятых выборок, не важно, является ли это число выборок ниже или то же самое, выше числа выборок символа, установленных в модуляторе, при этом синхронизация символа будет всегда сохраняться. В итоге предшествующие описания подробных вариантов осуществления не ограничивают возможные изменения частоты дискретизации принятого сигнала в настоящем изобретении.
Развивая эту концепцию дальше, сохранения синхронизации символа на всех стадиях обработки сигнала можно достигнуть при помощи множества вариантов осуществления настоящего изобретения, не описанных ранее. И снова, пока обработка сигнала основывается на значении периода символа или его перемножении выборок, то, например, модуль аддитивного наложения не должен накапливать каждую выборку, входящую в него. Например, каждая другая или каждая третья выборка может накапливаться сверх периода символа. Кроме того, граничные сегменты сигнала, накопленные для получения суммарного сигнала, необязательно будут непрерывными, при этом каждый другой или каждый третий сегмент, например, будет накладываться до тех пор, пока подход последовательно применяется ко всем входящим граничным сегментам сигнала.
Другой альтернативный вариант осуществления настоящего изобретения отходит от линейной и, таким образом, взаимозаменяемой природы процессов аддитивного наложения и согласованной фильтрации. Хотя предпочтительно продолжать согласованную фильтрацию с аддитивным наложением в настоящем изобретении, она не ограничивает его. Их последовательность можно поменять местами, таким образом, обеспечивая согласованную фильтрацию перед аддитивным наложением.
Следует отметить, что схемы или модули обработки сигнала в каждом из вариантов осуществления настоящего изобретения, которые включают в себя, но не ограничиваются модулем формирования пиков, модули аддитивного наложения и согласованного фильтра из модуля усиления сигнала, селектор пиков, блок извлечения фазы и генератор частоты, логический модуль подтверждения, модуль сложения разнесенных сигналов, модуль модулятора ОЧУ и все схемы, составляющие предыдущие модули, можно реализовать с использованием различных методов и технологий.
Модули можно реализовать в виде цифровых логических схем в виде вентильных матриц, интегральных схем специального назначения, полевых программируемых вентильных матриц, например, выпускаемых корпорацией Зилинкс (Zilinx Corp.), программируемых логических матриц и устройств и так далее.
Альтернативно, модули можно реализовать в виде программ, выполняемых на платформах аппаратных средств компьютера, такие как построенные на заказ или коммерчески используемые процессоры цифровых сигналов или мультиплексоры.
Кроме того, модули обработки сигнала можно реализовать исключительно в виде стандартных компьютерных программ, которые выполняются на компьютерной рабочей станции, для приложений, включающих в себя, например, имитацию.
Кроме того, аналоговую обработку при необходимости можно заменить на цифровую обработку.
Целиком всю систему настоящего изобретения можно реализовать с использованием действительно неограниченных комбинаций из предшествующих образцовых технологий.
Хотя это изобретение было описано совместно с конкретными видами и вариантами его осуществления, следует оценить, что к различным модификациям, отличным от тех модификаций, которые были обсуждены выше, можно обращаться без отступления от настоящего изобретения. Например, функциональные эквивалентные элементы можно заменить на те, которые конкретно показаны и описаны, пропорциональные количества элементов, показанных и описанных выше, можно изменить, и при выполнении описанных операций способа конкретные операции можно переставить или вставить без отступления от изобретения, которое определено в прилагаемой формуле изобретения.
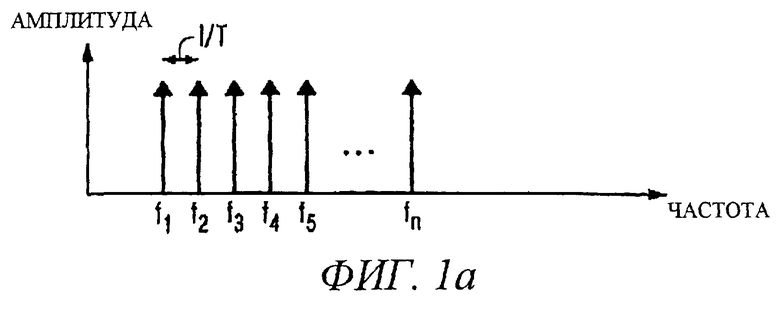
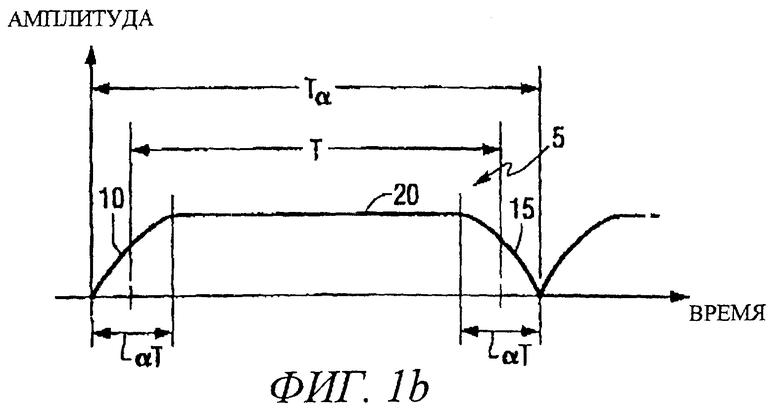
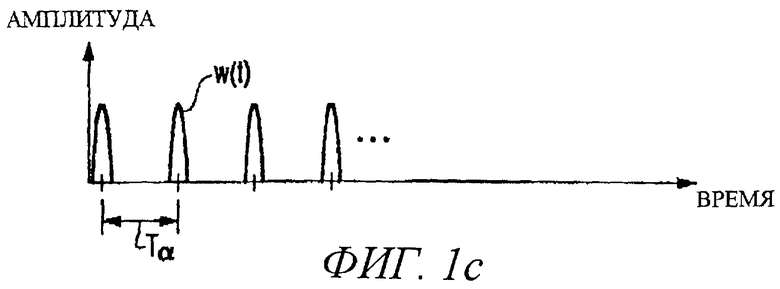

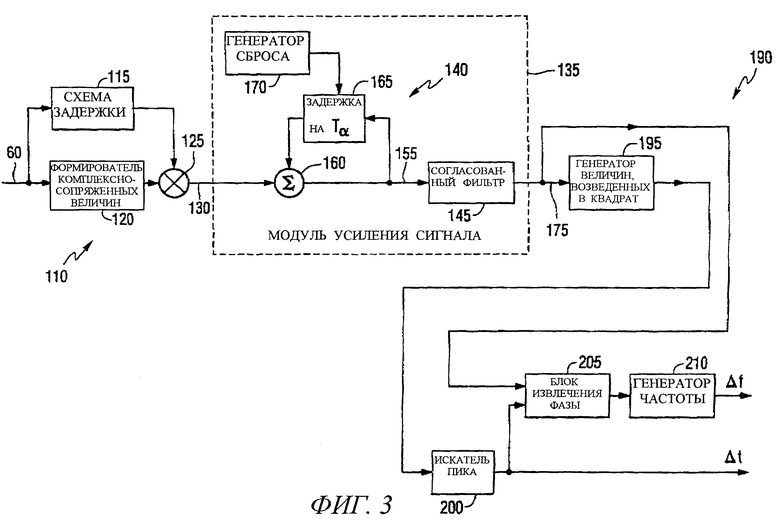
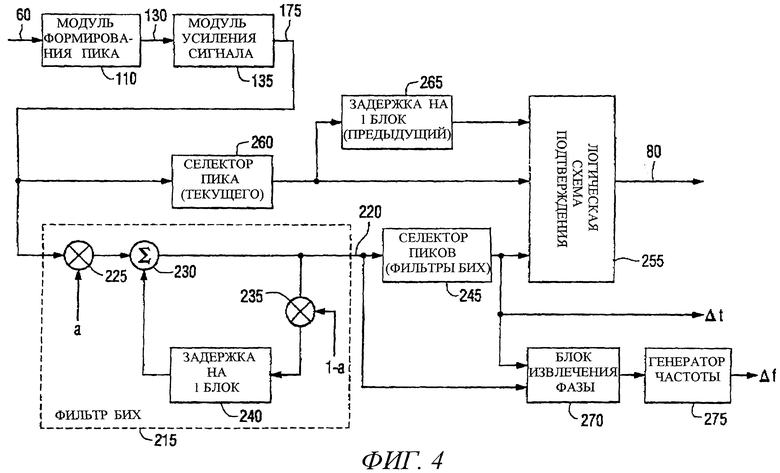
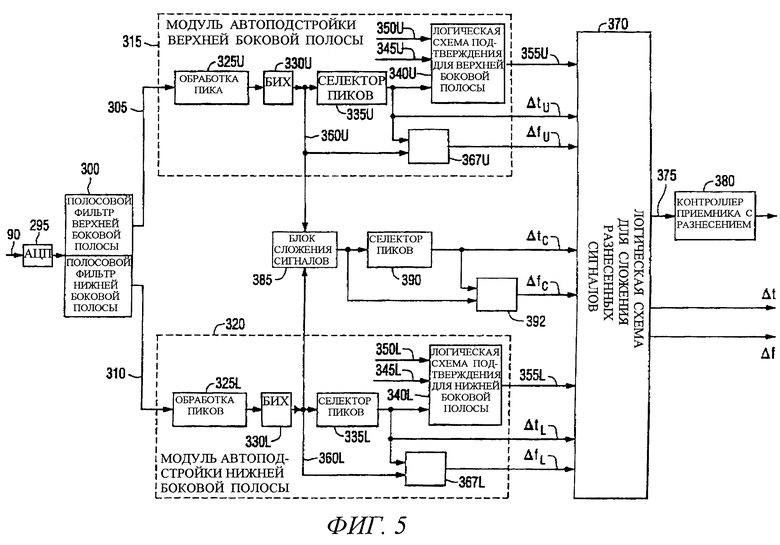
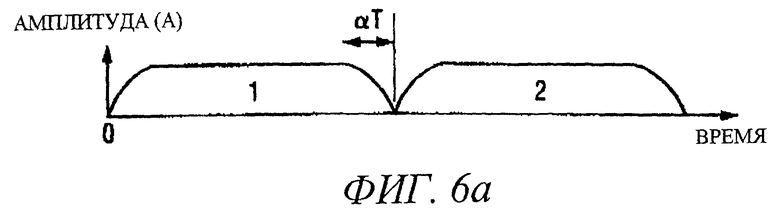
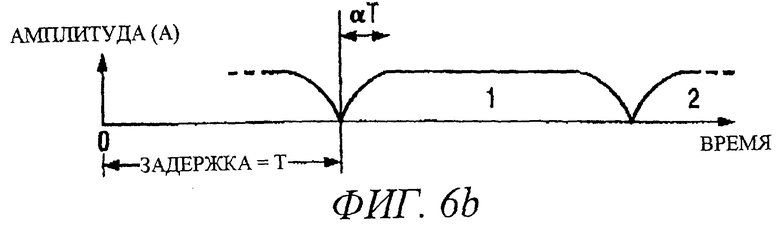
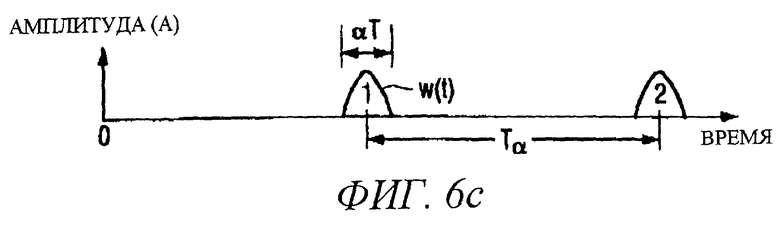
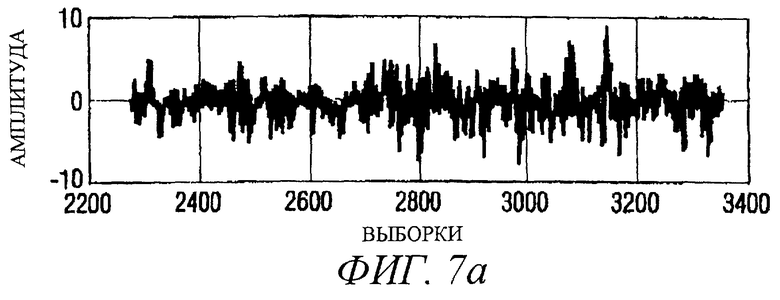
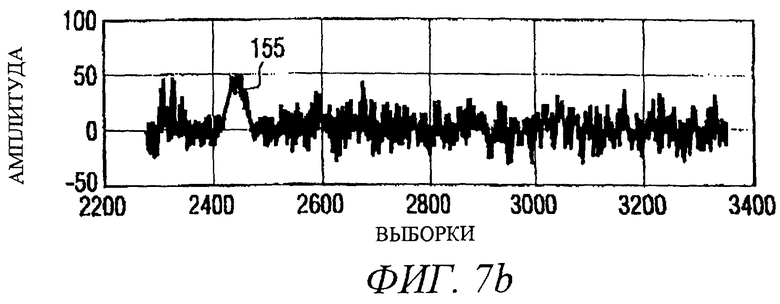
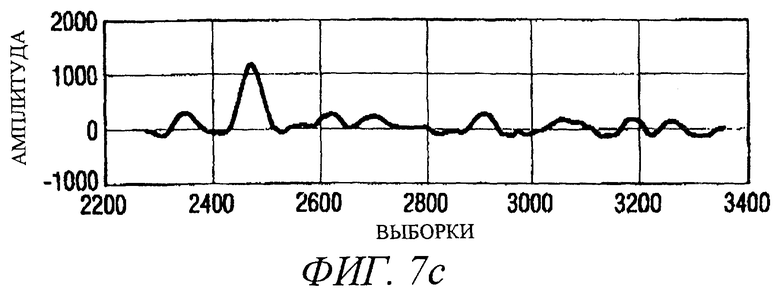
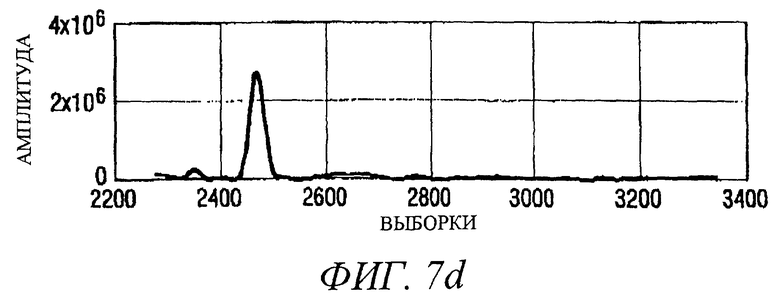
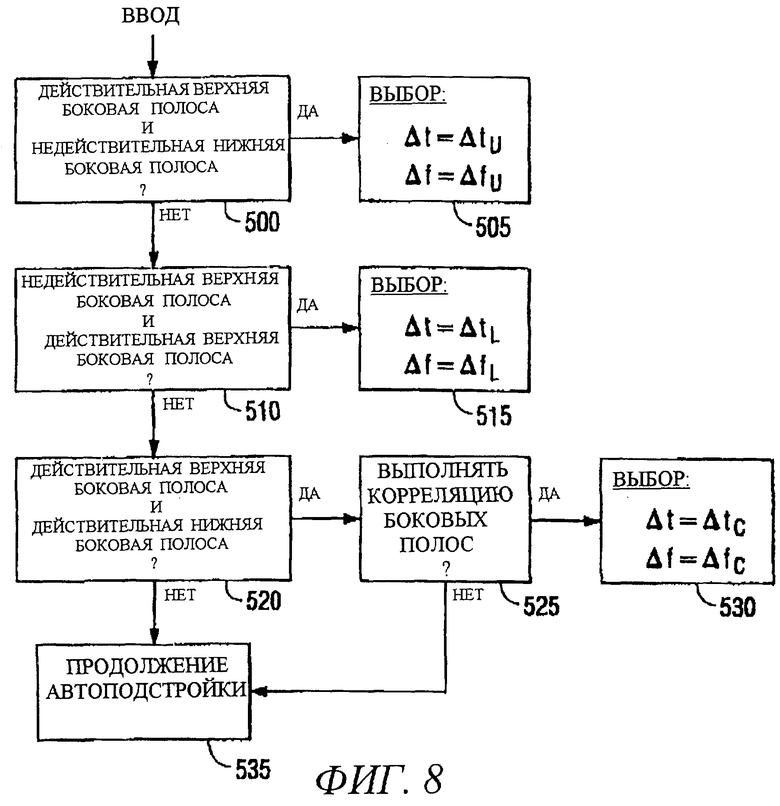
Изобретение относится к области цифровой связи и может быть использовано для устранения ошибки синхронизации символа и ошибки частоты несущей из сигнала связи с несколькими несущими и цифровой модуляцией. Достигаемый технический результат - создание системы с оптимальным восстановлением синхронизации символов и частоты несущей из сигнала с несколькими несущими и цифровой модуляцией. Система для устранения ошибки синхронизации символа и ошибки по частоте несущей из сигнала с ортогональным частотным уплотнением (ОЧУ) содержит средство для приема модулированного сигнала ОЧУ, представляющего собой последовательность символов ОЧУ, средство формирования пика, которое формирует граничный сигнал, состоящий из множества пиков сигнала, средство усиления сигнала, средство для установления временного положения, средство для устранения ошибки по частоте несущей принятого сигнала ОЧУ. 4 н. и 31 з.п. ф-лы, 16 ил.
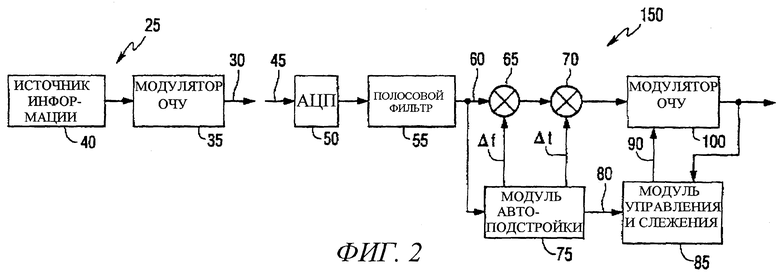
| US 5541552 А, 30.07.1996 | |||
| ЦИФРОВОЙ ПРИЕМНИК ДИСКРЕТНЫХ СИГНАЛОВ С "ВРАЩАЮЩЕЙСЯ ФАЗОЙ" | 1991 |
|
RU2038703C1 |
| УСТРОЙСТВО ДЛЯ ДЕМОДУЛЯЦИИ ДВОИЧНЫХ СИГНАЛОВ | 1991 |
|
RU2065668C1 |
| US 5581579 А, 03.12.1996 | |||
| US 5712879 А, 27.01.1998 | |||
| ЕР 0757461 А2, 05.02.1997. | |||
