Изобретение относится к области спорта и может быть использовано в компьютерных системах регулирования и управления.
Наиболее близким аналогом относительно заявленного изобретения является устройство для определения траектории движения штанги (RU 2126285, А63В 21/06, 1999), содержащее гриф штанги, доску для отображения траектории движения штанги, закрепленную перпендикулярно грифу, персональный компьютер в полном наборе - системный блок, дисплей, клавиатура, «мышь» и программное обеспечение, которое задает работу упомянутых дисплея и «мыши», а также устройства в целом. Недостатком известного изобретения является недостаточно точное определение траектории движения штанги.
Задачей изобретения является повышение определения траектории движения штанги.
Технический результат, заключающийся в устранении указанных недостатков в устройстве для определения траектории движения штанги, содержащем гриф штанги, доску для отображения траектории движения штанги, закрепленную перпендикулярно грифу, персональный компьютер в полном наборе - системный блок, дисплей, клавиатура, «мышь» и программное обеспечение, которое задает работу упомянутых дисплея и «мыши», а также устройства в целом, достигается тем, что в пружинном наконечнике, закрепленном на конце грифа штанги, к его цилиндрической части, надеваемой на гриф штанги с некоторой свободой вращения, прикреплен первый квадратный патрубок, в который вставлена пружина и второй квадратный патрубок меньшего поперечного сечения, на который прикреплена мышь в миниатюрном исполнении, являющаяся оптической, а к цилиндрической части пружинного наконечника прикреплен рычаг, на котором с возможностью плавного перемещения размещена инертная масса, при этом на доске размещена разметка для перемещения оптической мыши, представляющая собой коврик.
Программное обеспечение состоит из комплекса программ, и в комплекс программ автоматической обработки информации с оптической мыши входят программы: автоматический ввод и регистрация данных, предварительная обработка входящих сигналов - сглаживание, тарировка входного сигнала, вывод графического изображения входного сигнала, математическая обработка характеристик выполняемых физических упражнений. Программа математической обработки характеристик выполняемого физического упражнения позволяет выполнять расчет следующих биомеханических параметров: длительность всего упражнения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения, выполняемую работу во время всего упражнения или его части.
Устройство поясняется чертежами.
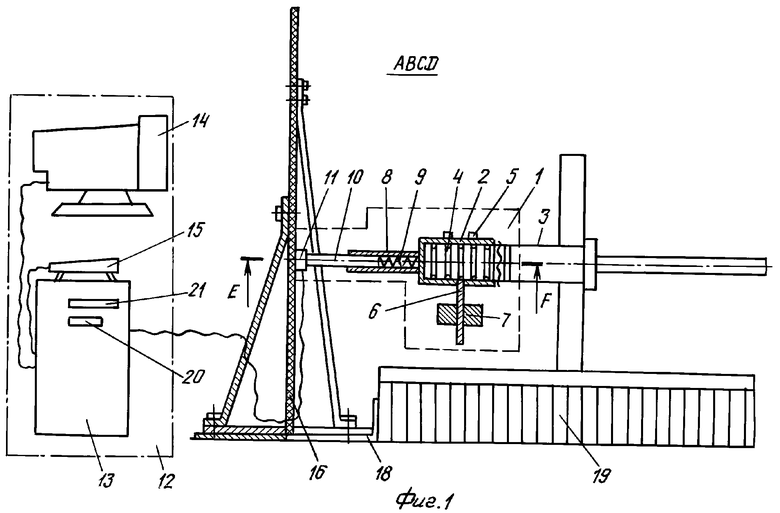
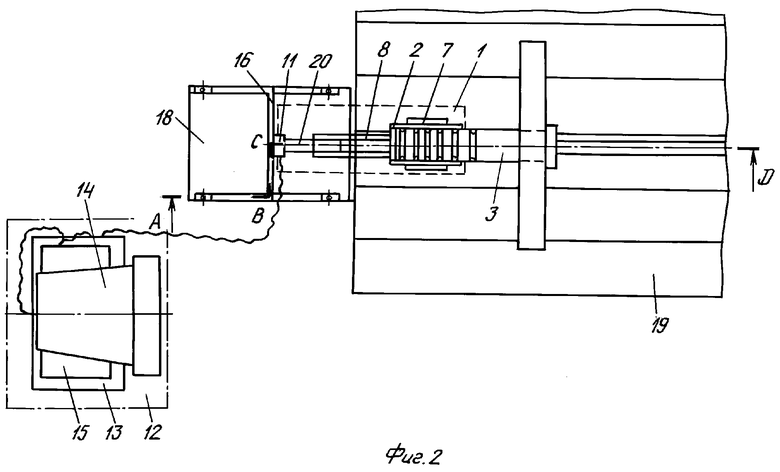
На фиг.1 и фиг.2 - устройство в целом;
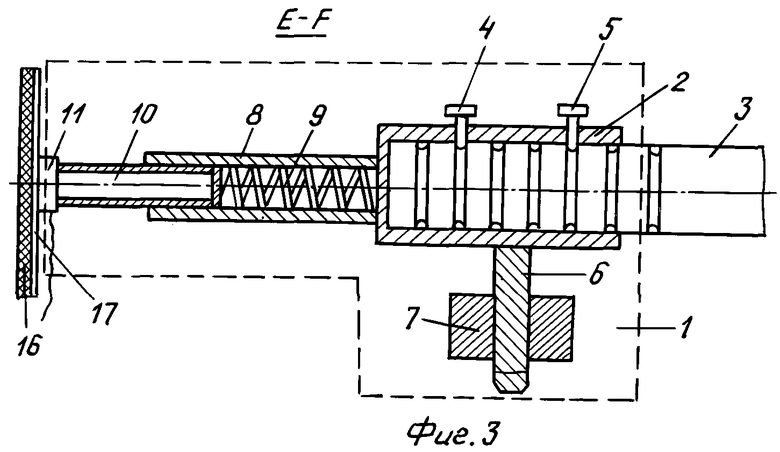
На фиг.3 - наконечник устройства.
Устройство включает измерительное средство, персональный компьютер и программное обеспечение. Измерительное средство фиг.1,2 содержит пружинный наконечник 1, оконтуренный пунктирной линией, состоящий из цилиндрической части 2, одеваемой на гриф 3 штанги с некоторой свободой вращения, обеспечиваемой винтами 4 и 5, входящими в пазы грифа 3 штанги, но не зажимающие его, а напротив этих винтов к цилиндрической части 2 закреплен, например, с помощью сварки рычаг 6, на котором размещена и плавно перемещается инертная масса, момент инерции которой поддерживает постоянство положения в пространстве пружинного наконечника 1. К центру донышка цилиндрической части 2 прикрепляется, например, сваркой первый квадратный патрубок 8, в который вставлена пружина 9, и второй квадратный патрубок 10 меньшего поперечного сечения, на который прикрепляется, например приклеиванием, миниатюрная оптическая мышь 11 персонального компьютера 12, оконтуренного штрихпунктирной линией, состоящего из системного блока 13, к которому подсоединена оптическая мышь 11 дисплея 14 и клавиатуры 15. Оптическая мышь 11 контактирует с доской 16 для отображения траектории движения штанги, установленной перпендикулярно к ее грифу 3. На доску 16 прикреплен, например, путем приклеивания коврик 17, по которому скользит оптическая мышь 11. Доска 16 жестко закреплена на поддоне 18, прикрепленном к помосту 19. Программное обеспечение записано на дискете или диске, которые вставляются в соответствующее гнездо 20 или 21 системного блока 13 персонального компьютера 12 и инициируется с помощью клавиатуры 15.
Прежде чем говорить об особенностях работы на устройстве, важно определиться, как относительно неточными измерительными средствами делать достаточно точные измерения. Это возможно сделать, по нашему мнению, выделив грубые измерения, и в каждом грубом измерении делать более точные замеры. Так, если выделить единичное перемещение объекта (штанги), ограничив виртуально его перемещение экраном дисплея, а при его большем изображении по X или Y его переход задать на следующем «листе» экрана дисплея и т.д. (грубое измерение), и сосчитать эти перемещения, а внутри каждого единичного перемещения с помощью оптической мыши сделать как бы точное позиционирование курсора дисплея, то таким образом можно получить достаточно точное измерение неточными измерительными средствами.
Относительно точным измерительным средством выступает оптическая мышь. Посмотрим, возможно ли это. «Зрение» оптическая компьютерная мышь [2] получает благодаря следующему процессу. С помощью светодиода и системы фокусирующих его свет линз под мышью подсвечивается участок поверхности. Отраженный от этой поверхности свет, в свою очередь, собирается другой линзой и попадает на приемный сенсор микросхемы-процессора обработки изображений (чип). Этот чип, в свою очередь, делает снимки поверхности под мышью с высокой стабильной частотой (кГц). Причем микросхема (назовем ее оптический сенсор) не только делает снимки, но сама же их и обрабатывает, так как содержит две ключевые части: систему получения изображения Image Acquisition Sistem (IAS) и интегрированный DSP процессор обработки снимков.
На основании анализа череды последовательных снимков (представляющих собой квадратную матрицу из пикселей разной яркости) интегрированный DSP процессор высчитывает результирующие показатели, свидетельствующие о направлении перемещения мыши вдоль осей Х и Y, и передает результаты своей работы вовне по последовательному порту.
Необходимо учитывать, что информацию о перемещении мыши микросхема оптического сенсора передает через Serual Port (последовательный порт) не напрямую в компьютер. Данные поступают к еще одной микросхеме-контроллеру, установленной в мыши. Эта вторая главная микросхема в устройстве отвечает за реакцию на нажатие кнопок мыши, вращение колеса прокрутки и т.д. Данный чип передает уже непосредственно в персональный компьютер информацию о направлении перемещения мыши, конвертируя данные, поступающие с оптического сенсора, в передаваемые по интерфейсам PS/2 или USB сигналы, а уже компьютер, используя драйвер мыши, на основании поступившей по этим интерфейсам информации, перемещает курсор-указатель по экрану дисплея.
Но вернемся к системе оптического слежения мыши. В целом система оптического слежения мыши, помимо микросхемы-сенсора, имеет еще несколько базовых элементов. Конструкция включает в себя держатель (Clip), в который устанавливается светодиод (Led) и непосредственно сама микросхема сенсора (Sensor). Эта система элементов крепится на печатную плату (РСВ), между которой и нижней поверхностью мыши (Base Plate) закрепляется пластиковый элемент (Lens), содержащий две линзы (о назначении которых говорилось выше). Оптимальное расстояние от элемента Lens до отражающей поверхности под мышью должно попадать в диапазон от 2,3 до 2,5 мм. Это рекомендации производителя сенсора. Вот почему оптические мыши плохо себя «чувствуют» «ползая» по оргстеклу на столе и всевозможным полупрозрачным «коврикам».
И все же основным элементом оптической компьютерной мыши является микросхема сенсора. Рассмотрим лучшую из известных микросхем сенсора [2]. Оптический сенсор ADNS-3060, по сравнению со своими «предками», обладает поистине впечатляющим набором характеристик. Использование этой микросхемы, упакованной в корпус с 20 контактами, обеспечивает оптическим мышам невиданные ранее возможности. Допустимая максимальная скорость перемещения манипулятора (мыши) выросла до 40 дюймов/с, то есть достигла «знаковой» скорости в 1 м/с. Это уже очень хорошо - вряд ли хоть один из пользователей двигает мышью с превышающей данное значение скоростью. Допустимое ускорение выросло в 100 раз (!) и достигло величины 15 g (почти 150 м/с2). Теперь на разгон мыши с 0 до предельных 1 м/с отводится 0,07 с - теперь очень немногие могут превзойти это ограничение. Программируемая скорость осуществления снимков поверхности оптическим сенсором у новой модели чипа превышает 6400 кадров/с. Причем чип ADNS-3060 может сам осуществлять подстройку частоты следования снимков для достижения наиболее оптимальных параметров работы, в зависимости от поверхности, над которой перемещается мышь. Разрешение оптического сенсора по-прежнему составляет 400 или 800 cpi.
При этом поступающий с внешнего кварцевого резонатора в блок Oscillator сенсора сигнал, частота которого 24 МГц, служит для синхронизации всех вычислительных процессов, протекающих внутри оптического сенсора ADNS-3060. Например, частота снимков этого оптического сенсора привязана к частоте внешнего генератора.
Таким образом, можно с помощью оптической компьютерной мыши и компьютера в целом производить достаточно точные измерения и выдавать в графическом и цифровом виде результаты этих измерений.
Работают с устройством следующим образом.
Перед началом измерений инженер-исследователь или тренер проверяет работоспособность устройства: устанавливает штангу с наконечником в исходное положение, чтобы оптическая мышь правильно контактировала с доской и наклеенным на ней «ковриком», область виртуальных ограничений и возможности позиционирования курсора дисплея с помощью оптической мыши. Убедившись в правильной работоспособности устройства в целом и отдельных его узлов, то есть программного обеспечения, можно начинать измерения, поднимая штангу.
Перемещая гриф 3 штанги, являющийся объектом измерения - траектории движения штанги, и с ним оптическую мышь 11, скользящую по доске 16 с наклеенным на ней «ковриком» 17, получают кривую движения - траекторию перемещения штанги в пространстве, которую наблюдают по движению курсора на экране дисплея 14 персонального компьютера 12, и определяют количественные характеристики.
Сосчитав количество виртуальных единичных перемещений и уточнив результат позиционирования курсора как по оси Х, так и по оси У в пределах каждого виртуального единичного перемещения, получают результат перемещения грифа 3 штанги - траекторию ее движения.
Программное обеспечение.
С его помощью осуществляется выполнение физических упражнений. При этом программное обеспечение должно состоять из комплексов программ. В комплекс программ, например автоматической обработки информации с оптической мыши 11, входят программы: автоматический ввод и регистрация данных, предварительная обработка сигналов (сглаживание), тарировка входного сигнала, вывод графического изображения входного сигнала, математическая обработка характеристик выполняемых физических упражнений.
Программа математической обработки характеристик выполняемого физического упражнения позволяет производить расчет следующих биомеханических параметров: длительность всего упражнения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения, выполняемую работу во время всего упражнения или его части.
По сравнению с прототипом предлагаемое устройство обладает новым качеством, позволяющим создать технические и программные средства и использовать стандартные вычислительные средства для измерения и регистрации объекта, например, траектории движения штанги, или его части с достаточной точностью относительно неточными средствами - оптической мышью, и зарегистрировать все перемещение.
Источники информации
1. Фарфель В.С. Управление движениями в спорте. - М.: ФиС, 1975. - С. 84.
2. http://www.ixbt.com/peripheral/mice-sensor.shtml
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2008 |
|
RU2378030C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2411978C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2479254C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2008 |
|
RU2389060C2 |
| УСТРОЙСТВО ШИРОКОДИАПАЗОННОЕ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА НА МОТИВАЦИОННОЙ ОСНОВЕ | 2009 |
|
RU2402269C1 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2007 |
|
RU2344863C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗВИТИЯ КОНДИЦИОННЫХ И КООРДИНАЦИОННЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2007 |
|
RU2349359C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА НА МОТИВАЦИОННОЙ ОСНОВЕ | 2004 |
|
RU2280405C2 |
Устройство для определения траектории движения штанги содержит гриф штанги, доску для отображения траектории движения штанги, которая закреплена перпендикулярно грифу, персональный компьютер в полном наборе - системный блок, дисплей, клавиатура, «мышь» и программное обеспечение, которое задает работу упомянутых дисплея и «мыши», а также устройства в целом. В пружинном наконечнике, который закреплен на конце грифа штанги, к его цилиндрической части, надеваемой на гриф штанги с некоторой свободой вращения, прикреплен первый квадратный патрубок, в который вставлена пружина и второй квадратный патрубок меньшего поперечного сечения, на которой прикреплена мышь в миниатюрном исполнении, являющаяся оптической, а к цилиндрической части пружинного наконечника прикреплен рычаг, на котором с возможностью плавного перемещения размещена инертная масса, на доске размещена разметка для перемещения оптической мыши, представляющая собой «коврик». Использование данного изобретения позволяет повысить точность определения траектории движения штанги. 2 з.п. ф-лы, 3 ил.
1. Устройство для определения траектории движения штанги, содержащее гриф штанги, доску для отображения траектории движения штанги, закрепленную перпендикулярно грифу, персональный компьютер в полном наборе - системный блок, дисплей, клавиатура, «мышь» и программное обеспечение, которое задает работу упомянутых дисплея и «мыши», а также устройства в целом, отличающееся тем, что в пружинном наконечнике, закрепленном на конце грифа штанги, к его цилиндрической части, надеваемой на гриф штанги с некоторой свободой вращения, прикреплен первый квадратный патрубок, в который вставлена пружина и второй квадратный патрубок меньшего поперечного сечения, на которой прикреплена «мышь» в миниатюрном исполнении, являющаяся оптической, а к цилиндрической части пружинного наконечника прикреплен рычаг, на котором с возможностью плавного перемещения размещена инертная масса, при этом на доске размещена разметка для перемещения оптической «мыши», представляющая собой «коврик».
2. Устройство по п.1, отличающееся тем, что в нем программное обеспечение состоит из комплекса программ, и в комплекс программ автоматической обработки информации с оптической «мыши» входят программы: автоматический ввод и регистрация данных, предварительная обработка входящих сигналов - сглаживание, тарировка входного сигнала, вывод графического изображения входного сигнала, математическая обработка характеристик выполняемых физических упражнений.
3. Устройство по п.1, отличающееся тем, что в нем программа математической обработки характеристик выполняемого физического упражнения позволяет выполнять расчет следующих биомеханических параметров: длительность всего упражнения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения, выполняемую работу во время всего упражнения или его части.
| СПОСОБ ТРЕНИРОВКИ СПОРТСМЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2126285C1 |
| RU 94027113 A1, 27.07.1996 | |||
| Машина для непрерывного литья | 1939 |
|
SU67460A1 |
| US 4921244 A, 01.05.1990 | |||
| US 5407403 A, 18.04.1995 | |||
| US 5391128 A, 21.02.1995. | |||

