Изобретение относится к области техники, где применяется гашение механических колебаний, в частности предназначено для использования в подвесках транспортных средств.
Известен телескопический пневмоамортизатор, содержащий корпус со средствами крепления к одной части объекта, установленный в нем полый поршень со средствами крепления его торца к другой части объекта, поршень, связанный стержнем с корпусом, коммутационно-клапанную систему (ККС), имеющую подпружиненный запорный элемент, установленный с возможностью сообщения между собой соседних поршневых полостей, привод работы запорного элемента и узел его управления (RU, №2031272, кл. F16F 9/04, 1995 г.).
Недостатком этого амортизатора является сложность конструкции, низкая надежность работы ККС и большая инерционность в ее работе.
Известен телескопический пневмоамортизатор, содержащий корпус и п-е количество ступеней, образованных установленными в нем основным и дополнительными полыми штоками с подпружиненными поршнями, имеющими дроссельные системы и коммутационно-клапанную систему (ККС), гашение механических колебаний которого осуществляется созданием сопротивления движению поршня путем импульсного количественного перераспределения рабочего агента между над- и подпоршневой полостями при смене направления его движения (RU, №2088819, кл. F16F 9/04, 1997 г.).
Недостатком известного устройства является низкая надежность работы ККС и большое запаздывание начала истечения рабочего агента из полости с большим давлением в полость с меньшим при смене направления движения поршня.
Наиболее близким техническим решением к заявленному изобретению является телескопический несущий пневмоамортизатор Горбулина, содержащий корпус со средствами крепления к одной части объекта, установленный в нем полый поршень со средствами крепления его торца к другой части объекта, поршень, связанный стержнем с корпусом, коммутационно-клапанную систему (ККС), имеющую подпружиненный запорный элемент, установленный с возможностью сообщения между собой соседних поршневых полостей, привод работы запорного устройства и узел его управления, электронный коммутатор, связанный на входе с электронными датчиками, а на выходе с приводом запорного элемента ККС (RU, №2136985, кл. Р16Р 9/04, 1998 г.).
Недостатком этого амортизатора является сложность конструкции.
Задачей настоящего изобретения является упрощение конструкции амортизатора повышение качества работы ККС и введение элементов управления работой пружины.
Указанная задача решается в несущем телескопическом пневмоамортизаторе, содержащем корпус со средствами крепления к одной части объекта, установленный в нем полый поршень со средствами крепления его торца к другой части объекта, поршень, связанный стержнем с корпусом, коммутационно-клапанную систему (ККС), имеющую подпружиненный запорный элемент (ЗЭ), установленный с возможностью сообщения между собой соседних поршневых полостей (ПП), привод работы ЗЭ и узел его управления, содержащий электронный коммутатор (ЭК), связанный на входе с электронными датчиками, а на выходе с приводом ЗЭ ККС, за счет того, что стержень делается полым, в его полости выполняются перепускные отверстия (ПО) со всеми ПП, а ЗЭ в виде полого цилиндра располагается у ПО средней ПП.
Указанная задача решается также за счет того, что:
- ПО с одной крайней ПП и ПО средней ПП делаются рядом с торцом полого стержня, а ПО с другой крайней ПП - у его крепления к корпусу;
- ЭК дополняется микропроцессором, который во время работы ТНПА непрерывно отслеживает все поступающие на его входное устройство сигналы, обрабатывает их, находит оптимальное решение местоположения ЗЭ относительно ПО и выдает на вход ЭК исполнительный сигнал;
- задние ТНПА (т.е. установленные на задних колесах) работают с учетом сигналов от датчиков передних колес;
- на входное устройство микропроцессора передних колес подключается выход радара, сканирующего профиль дороги перед транспортным средством;
- в микропроцессор вводится ряд опорных значений давлений, соответствующие выбранным значениям давлений, при которых полый поршень занимает различное рабочее положение, увеличивая или уменьшая дорожный просвет, а к ТНПА подводятся гибкие каналы:
- один от резервуара, наполненного рабочим агентом под высоким давлением, другой - от резервуара с низким давлением, причем резервуар с низким давлением может соединяться со входом компрессора, а резервуар с высоким давлением - с его выходом.
На чертеже схематично показан общий вид телескопического несущего пневмоамортизатора ТНПА.
ТНПА содержит корпус 1 со средствами 2 для крепления амортизатора к одной части объекта (не показан). В корпусе 1 установлен полый поршень 3, торец которого 4 может иметь дроссельные отверстия. Торец 5 поршня 3 имеет средства 6 для крепления ТНПА к другой части объекта (не показан). В полом поршне 3 установлен поршень 7 с дроссельными отверстиями (не показаны), жестко связанный с корпусом 1 полым стержнем 8. Поршни 3 и 7 могут образовать между собой и с корпусом среднюю поршневую полость 9 и крайние поршневые полости 10 и 11, которые имеют возможность сообщения между собой посредством перепускных отверстий (ПО) 12, 13, выполненных в полом стержне 8, ПО 14 - в поршне 7, а так же ПО 15 - в запорном элементе (ЗЭ) 16. ЗЭ 16, выполненный в виде полого цилиндра с перегородкой, располагается внутри полого стержня 8 напротив ПО 13 и посредством тяги 17, подпружиненной пружиной 18, соединяется с приводом в виде соленоида 19, закрепленным на крышке корпуса 1. Узел управления работой ТНПА и ЗЭ 16 выполнен в виде микропроцессора (ПРЦ) 20, электронного коммутатора (ЭК) 21, датчика давления (ДД) 22 и датчика смены направления движения поршня (СНД) 23.
Вход ДД 22 связан с пространством 11, СНД 23 установлен на торце 5, а их сигналы подаются на входное устройство ПРЦ 20. Выход ПРЦ 20 связан со входом ЭК 21, а выход ЭК 21 - с соленоидом 19. Выход ПРЦ 20 также имеет связь с устройствами, одно из которых открывает рабочему агенту выход из ТНПА наружу или по гибкому каналу в резервуар с низким давлением, а другое подобным образом вход в него из резервуара с высоким давлением. Компрессор, ПРЦ 20 и ЭК 21 имеют источник электрической энергии (ИЭЭ) 24.
Дроссельные системы поршней и устройства для заполнения полостей рабочим агентом и выпуска его из них, а также гибкие каналы, компрессор и резервуары с низким и высоким давлением на схеме не показаны.
ТНПА работает следующим образом.
После установки несущего амортизатора весь его объем наполняется рабочим агентом до установления заданного положения полого поршня 3 относительно корпуса 1, что соответствует конкретной величине давления внутри ТНПА для устройства, на которое он установлен. Эта величина давления принимается за опорную и вводится в микропроцессор. При ходе сжатия ПРЦ 20, получив от датчика СНД 23 сигнал, открывает ПО 13, подавая команду на ЭК 21 и, тем самым, напряжение на соленоид 19, появившееся магнитное поле сжимает пружину 18, втягивая внутрь соленоида 19 тягу 17, выполняющую роль магнитного стержня, и перемещая с ней ЗЭ 16. Рабочий агент через открытые ПО 13 и дроссельные системы поршней количественно перераспределяется между поршневыми полостями (ПП) 9 и 10, 11, а ТНПА работает, как пневмопружина, линейно сопротивляясь сжатию по всей длине хода поршня. При возвратном движении полого поршня 3 (ходе отбоя) датчик СНД 23 сигнализирует об этом на ПРЦ 20, который через ЭК 21 снимает магнитное поле с соленоида 19 и подпружиненный ЗЭ 16 под действием пружины 18 перекрывает сообщение между ПП 9 и ПП 10, 11. Возвратное движение полого поршня 3 тормозится сопротивлением количественно перераспределенного между полостями рабочего агента. Процесс повторяется при каждой смене направления движения полого поршня 3. Микропроцессор ПРЦ 20, отслеживая сигналы от радара, датчиков СНД 23, ДЦ 22, сравнивая значение давления последнего с опорным и учитывая местоположение поршня 3 в данный момент времени, выбирает оптимальное решение местоположения ЗЭ 16 и посылает в данный момент времени на ЭК 21 соответствующий сигнал. При движении по ровному покрытию (асфальт) водитель меняет в ПРЦ 20 значение опорного давления на одно из меньших, а по бездорожью на одно из больших.
При этом в первом случае ПРЦ 20 отправит сигнал на устройство, которое откроет рабочему агенту вход резервуара с низким давлением, чтобы принять часть его из ТНПА, а во 2-м - с высоким, чтобы добавить его количество в ТНПА. Компрессор обеспечивает в резервуаре с низким давлением рабочего агента его низкое давление, а в резервуаре с высоким давлением - высокое. Можно установить парковочное значение опорного давления в ПРЦ 20, при котором кузов транспортного средства будет ложиться на грунт. Аналогичные действия ПРЦ 20 выполнит, если величина перевозимого груза уменьшится или увеличится, сохраняя дорожный просвет, согласно установленному водителем одному из значений опорных давлений.
Изобретение относится к области гашения механических колебаний, в частности в подвесках транспортных средств. Пневмоамортизатор содержит корпус со средствами крепления к одной части объекта. В корпусе установлен полый поршень (3) со средствами крепления к другой части объекта. Поршень (7) связан стержнем с корпусом. Коммутационно-клапанная система имеет подпружиненный запорный элемент, установленный с возможностью сообщения между собой соседних поршневых полостей. Узел управления запорным элементом содержит электронный коммутатор, связанный на входе с электронными датчиками, а на выходе с приводом запорного элемента коммутационно-клапанной системы. Стержень выполняется полым. В стержне делаются перепускные отверстия со всеми поршневыми полостями. Запорный элемент в виде полого цилиндра располагается у перепускного отверстия средней поршневой полости. Достигаются упрощение конструкции, повышение качества демпфирования. 5 з.п. ф-лы, 1 ил.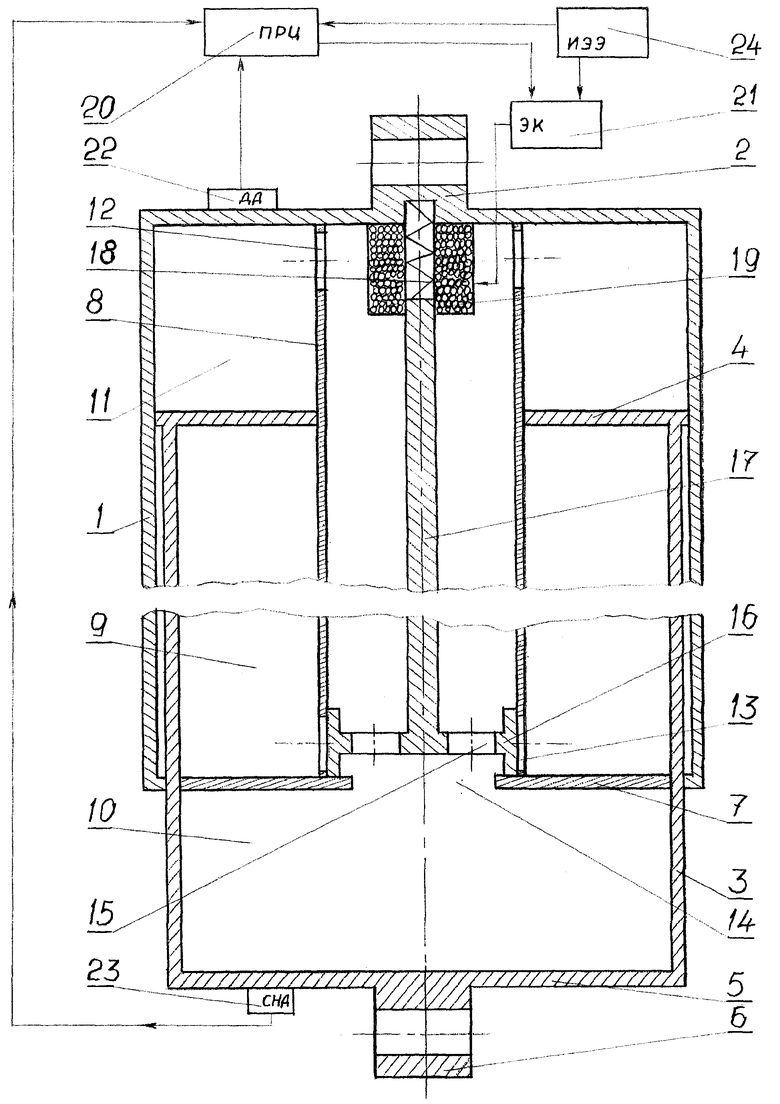
1. Телескопический несущий пневмоамортизатор, содержащий корпус со средствами крепления к одной части объекта, установленный в нем полый поршень со средствами крепления к другой части объекта, поршень, связанный стержнем с корпусом, коммутационно-клапанную систему, имеющую подпружиненный запорный элемент, установленный с возможностью сообщения между собой соседних поршневых полостей, привод работы запорного элемента и узел его управления, содержащий электронный коммутатор, связанный на входе с электронными датчиками, а на выходе - с приводом запорного элемента коммутационно-клапанной системы, отличающийся тем, что стержень выполняется полым, в нем делаются перепускные отверстия со всеми поршневыми полостями, а запорный элемент в виде полого цилиндра располагается у перепускного отверстия средней поршневой полости.
2. Телескопический несущий пневмоамортизатор по п.1, отличающийся тем, что перепускные отверстия у средней поршневой полости и одной крайней располагаются рядом с торцем полого стержня, а перепускные отверстия другой крайней поршневой полости - у места крепления его к корпусу.
3. Телескопический несущий пневмоамортизатор по п.1, отличающийся тем, что в узел управления работой запорного элемента вводится микропроцессор, непрерывно отслеживающий все поступающие на его входное устройство сигналы, который обрабатывает их, определяет оптимальное местоположение запорного элемента относительно перекрываемых им перепускных отверстий и посылает на вход электронного коммутатора исполнительный сигнал.
4. Телескопический несущий пневмоамортизатор по п.3, отличающийся тем, что микропроцессор содержит ряд опорных значений давлений, каждое из которых, будучи установленным, автоматически поддерживает путем сравнения с опорным рабочее давление внутри пневмоамортизатора, добавляя или уменьшая количество рабочего агента, и, тем самым, изменяя дорожный просвет, соответственно, в большую или меньшую сторону.
5. Телескопический несущий пневмоамортизатор по п.4, отличающийся тем, что он имеет гибкие каналы, один из которых соединен с резервуаром, имеющим низкое давление рабочего агента, а другой - с резервуаром, наполненным рабочим агентом под высоким давлением, причем резервуар с низким давлением может соединяться со входом компрессора, а резервуар с высоким - с выходом его, и при этом микропроцессор имеет связь с устройствами, одно из которых открывает рабочему агенту выход из пневмоамортизатора наружу или в резервуар с низким давлением, а другое - вход в него из резервуара с высоким давлением.
6. Телескопический несущий пневмоамортизатор по п.3, отличающийся тем, что на его входное устройство могут приниматься сигналы от радара, сканирующего профиль дороги впереди транспортного средства, а для пневмоамортизаторов, установленных на задних колесах, - копии входных сигналов микропроцессора переднего колеса.
| ТЕЛЕСКОПИЧЕСКИЙ НЕСУЩИЙ ПНЕВМОАМОРТИЗАТОР ГОРБУЛИНА | 1998 |
|
RU2136985C1 |
| Гидравлический демпфер | 1990 |
|
SU1783191A1 |
| US 5366048 А, 22.11.1994 | |||
| JP 6147248 А, 27.05.1994. | |||

