Изобретение относится к области техники, где применяется гашение механических колебаний, в частности предназначено для использования в подвесках транспортных средств (ТС).
Известны резинокордные упругие элементы подвески транспортных средств, имеющие различные конструкции, но все они достаточно громоздки.
Известны винтовые металлические пружины сжатия, используемые в качестве основных упругих элементов для малотоннажного транспорта, но их рабочий ход ограничивается величиной рабочего хода амортизаторов, работающих совместно с ними.
Известен амортизатор электронно-регулируемый «АЭР», состоящий из имеющих элементы крепления к частям объекта тормозного стержня и устройства с тормозными колодками, внутри которого он перемещается и работой которого управляет компьютер или процессор по специальным программам, имеющим ряд амортизационных характеристик для разных дорожных условий и режимов езды в автоматическом и ручном управлении в зависимости от выбора водителя (RU №2524773 С2, кл. F16F 7/08, 2012).
Наиболее близким техническим решением к заявленному способу является способ автоматического поддержания величины дорожного просвета в «Простом несущем управляемом пневмоамортизаторе (ПНУПА)», содержащем подсоединенные к входу и выходу компрессора резервуары высокого и низкого давлений с устройствами автоматического впуска и выпуска рабочего агента из замкнутого рабочего объема и снабженном устройством, содержащим тормозные колодки и привод, который для эффективного демпфирования прижимает их в нужный момент времени с необходимой силой к внешней поверхности полого штока (RU №2413104 C1, кл. F16F, 2009).
ПНУПА способен выполнять некоторое количество дополнительных функций помимо гашения колебаний и поддержания величины дорожного просвета согласно выбору водителя, но громоздкость конструкции ограничивает возможности его применения.
Задачами изобретения является:
1. найти способ увеличения функциональных возможностей несущего упругого элемента подвески современных ТС, позволяющий значительно увеличить их рабочий ход и широко менять дорожный просвет вплоть до укладывания ТС на грунт по программам, заложенным в память электронного устройства, и создать компактное устройство для его воплощения в жизнь;
2. изыскать способ дополнить подвеску у находящихся в эксплуатации ТС следующими функциями или частью из них:
а. снижать крен на поворотах;
б. поддерживать заданный дорожный просвет постоянным при изменении веса перевозимого груза;
в. наклонять кузов ТС в разные стороны для разгрузки сыпучего груза и погрузки габаритных грузов с помощью лебедки;
г. менять колесо на запасное без использования домкрата;
д. увеличить проходимость ТС по бездорожью и выходить из трудных дорожных ситуаций путем изменения положения кузова относительно преграды, мешающей дальнейшему движению ТС (например, при выезде из рвов и рек с крутым берегом при их преодолении, в частности, препятствуя опрокидыванию),
и создать для реализации способа компактное устройство, присоединяемое к торцам несущего упругого элемента подвески ТС в виде дополнения (приставки).
Первая указанная задача решается способом увеличения функциональных возможностей подвески ТС, заключающимся в использовании внутреннего пространства жесткого упругого элемента, способного при полном сжатии укладываться в одной плоскости, для создания рабочего объема, позволяющего в совокупности с жесткостью самого упругого элемента сделать их общую жесткость переменной и управляемой с целью получения изменяющегося в широких пределах рабочего хода упругого элемента, обеспечивающего широкое изменение дорожного просвета и способного устанавливать его любой требуемой величины, вплоть до возможности укладывания ТС на грунт, а также в управлении его работой по специально созданным программам, заложенным в память электронного устройства (ЭУ), имеющего управляющую память и логику формирования управления, генерирующего все необходимые управляющие сигналы.
Первая указанная задача также решается в управляемых несущих амортизаторах (УНА) методом создания управляемых упругих элементов такой конструкции, которые позволяют широко менять дорожный просвет и устанавливать его любой требуемой величины, вплоть до укладывания ТС на грунт, по программам, заложенным в память электронного устройства путем такого преобразования конструкции амортизатора ПНУПА, при котором корпус с поршнем преобразуется в пневматическое устройство (ПУ) с герметично замкнутым рабочим объемом (PO), заключенным в герметичную высокопрочную эластичную оболочку (ВЭО), расположенную внутри конической пружины сжатия (КПС) с жестко прикрепленными к ее торцам основаниями, имеющими элементы крепления к частям объекта, или из нескольких таких PO, объединенных в одну общую конструкцию и соединенных через управляемые перепускные устройства (УПУ) с резервуарами высокого давления (РВД) и низкого давления (РНД), а устройство с тормозными колодками и полым штоком преобразуется в одно или несколько электронно-регулируемых прижимных с элементами крепления к частям объекта устройств (ЭРПУ), имеющих тормозные колодки с приводом и тормозные стержни любой требуемой формы, преобразованные из полого штока.
Демпфирование осуществляется путем управляемого механического трения между рабочими поверхностями тормозных колодок и тормозных стержней и перепусканием рабочего агента из рабочих объемов в резервуары с низким и высоким давлением.
Возможна также конструкция ПУ, у которого витки КПС встраиваются в положении ее наибольшего растяжения внутрь стенки ВЭО, образуя тем самым одно целое. Причем в обоих случаях с витками, которые в каждом отдельном случае могут быть любой формы (например, квадрат, прямоугольник, овал и другой, вплоть до специальной) и таким шагом, чтобы при максимальном сжатии пружины они вместе с ВЭО укладывались в одной плоскости в виде спирали, не мешая друг другу. Спираль будет иметь форму, зависящую от конфигурации витков. Материал, диаметр, сечение витка, конфигурация и шаг пружины выбираются с учетом оптимального соотношения прочности и долговечности с материалом и толщиной ВЭО, а также с особенностями места установки ПУ на ТС. В положении своего наибольшего растяжения ПУ имеет вид усеченного конуса, у которого при сжатии поверхность ВЭО свободно и равномерно распределяется наружу между его витками. Жесткие основания имеют элементы крепления к частям объекта.
КПС с круглым сечением витка может быть сжата до величины, равной диаметру витка - D. В нашем случае наибольшая высота (толщина) ПУ с круглой формой сечения витков КПС в сложенном состоянии определяется как
Hmax=D+2L1+L2+L3,
где Hmax - высота ПУ в сложенном состоянии,
D - диаметр витка пружины,
L1 - толщина стенки ВЭО,
L2 - толщина нижнего основания,
L3 - толщина верхнего основания.
Можно уменьшить нагрузку на стенки ВЭО, увеличив площадь соприкосновения ее боковой поверхности с поверхностью витков. Для этого вместо круглой формы витка используется прямоугольная того же сечения с короткой стороной, обращенной в сторону основания. Если при этом сохраняется площадь сечения витков, то сохраняется и жесткость пружины КПС, но увеличиваются: высота витков, PO и площадь верхнего основания ПУ, а также, в свою очередь, расширяется предел изменения жесткости ПУ и уменьшается возможность соприкасаться с частями ТС поверхности ВЭО и виткам КПС в состоянии наибольшего сжатия ПУ.
При наибольшем растяжении ПУ величина поверхности ВЭО такая, что обеспечивает свободное перемещение витков КПС и может выходить за их наружные пределы. Для уменьшения толщины стенки ВЭО, она может армироваться гибкой металлической сеткой.
ПУ может состоять из двух PO, объединенных общим основанием или в узкой, или в широкой части. При этом основание между ними может быть герметичным, а рабочие объемы находиться под разным рабочим давлением, причем каждый из них через УПУ соединяется с РВД и РНД, создавая таким образом две последовательно соединенные независимые управляемые пневматические пружины, одна из которых может быть мягкой (ПУН), а другая - жесткой (ПУВ), что позволяет путем электронного управления работой УНА эффективнее гасить колебания в более широком частотном спектре.
Специальная сложная форма витков пружины дает возможность рационально использовать пространство в месте установки амортизатора на ТС с целью получения наибольшего рабочего объема ПУ, что, в свою очередь, увеличивает пределы изменения ее жесткости. Их форма и конфигурация выбирается таким образом, чтобы максимально использовать внутри ТС объем в месте установки амортизатора. Сечения витков пружины могут иметь на разных участках по всей ее длине разную форму (квадрат, прямоугольник, овал и другие) и площадь сечения.
Для обеспечения требуемой величины дорожного просвета на ТС могут устанавливаться ПУ, последовательно или параллельно соединенные между собой основаниями, представляя собой отдельные группы или гирлянду из их конструкций. Такая компоновка ПУ дает возможность эффективнее использовать установочное пространство.
Все ПУ образуют герметично замкнутые рабочие объемы, заполненные под давлением рабочим агентом, сообщающиеся через УПУ с резервуарами высокого и низкого давления, которые могут быть сменными. Между РВД и РНД может быть установлен компрессор с целью создания замкнутой цепи для многократного использования рабочего агента.
Если жесткость КПС выбрать позволяющий ТС под своим весом ложиться на дорожное полотно при ее наибольшем сжатии, то дорожный просвет будет иметь нулевую или небольшую отрицательную величину. При этом общая жесткость ПУ, необходимая для движения ТС с заданным дорожным просветом, устанавливается водителем или программой ЭУ, имеющего управляющую память и логику формирования управления, генерирующего все необходимые управляющие сигналы, путем управления изменением давления внутри ВЭО. Для повышения надежности и живучести ТС крайние звенья в гирлянде могут дополняться внутри ПУ незаполненными рабочим агентом, добавочными ВЭО, предназначенными для обеспечения рабочего дорожного просвета в аварийных случаях (ПУА), путем быстрого наполнения их объемов рабочим агентом до требуемого значения из РВД. Для снижения трения между поверхностями витков КПС и ВЭО чистота их поверхностей в местах соприкосновения выполняется необходимой величины и поверхность обеспечивается смазкой, а сама конструкция ПУ снабжается защитным кожухом, конструкция которого может быть любой.
ЭРПУ могут быть установлены в количестве, необходимом для обеспечения эффективного гашения колебаний, и представлять собой от одного до нескольких отдельных устройств. Они могут как объединяться в одну общую конструкцию с ПУ, так и устанавливаться отдельно от нее самостоятельной, не входящей в состав других устройств конструкцией, используя удобные свободные пространства подвески ТС, при этом у них тормозные стержни одним концом крепятся к одному из оснований ПУ или к одной части объекта, а свободной стороной, не выпадая, двусторонне перемещаются по всей своей длине между тормозными колодками прижимных устройств, прикрепленных к другой части объекта или другому основанию ПУ, причем сечение тормозных стержней может иметь в любой части их длины и на разных отдельных их участках разные размеры и форму в сечении. Тормозные колодки и тормозные стержни могут иметь тормозные накладки, а между ними могут быть установлены вместо тормозных накладок тормозные прокладки. Тормозные накладки и тормозные прокладки могут быть сменными.
Работой УНА управляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, имеющее датчики, непрерывно отслеживающие изменение всех рабочих параметров амортизатора, имеющее одну или набор рабочих программ с рядом заданных для разных дорожных условий и режимов езды амортизационных характеристик в автоматическом и ручном управлении, включаемых в работу по выбору водителя, а также имеющее программу или программы управления дорожным просветом при ремонтных, погрузо-разгрузочных работах, при изменении веса перевозимого груза, при выходе из трудных дорожных ситуаций и для устранения опасного крена при поворотах, к тому же может иметь программу, обеспечивающую независимую регулировку жесткости до предельных значений отдельно каждой ПУ и тем самым позволяющую выполнять замену колеса без домкрата и обеспечивать наклон кузова для облегчения разгрузки сыпучего груза в стороны и назад.
Положения кузова для разгрузки сыпучего груза, погрузки габаритных грузов, замены колеса на запасное и выхода из трудной дорожной ситуации могут быть выведены на пульт водителя в ручном и автоматическом режиме.
ЭУ содержит программы, осуществляющие отдельное управление работой каждой части УНА, исходя из заданных параметров работы УНА для конкретных дорожных условий и скорости движения ТС. УНА хорошо обдувается встречным потоком воздуха, что обеспечивает хороший отвод тепла, как и у обычных рессор.
Между средствами крепления УНА и объектом могут устанавливаться подшипники, позволяющие ему поворачиваться вокруг своей оси независимо от частей объекта.
При использовании в качестве рабочего агента жидкости конструкция ПУ может применяться в различных гидравлических системах для увеличения их функциональных возможностей.
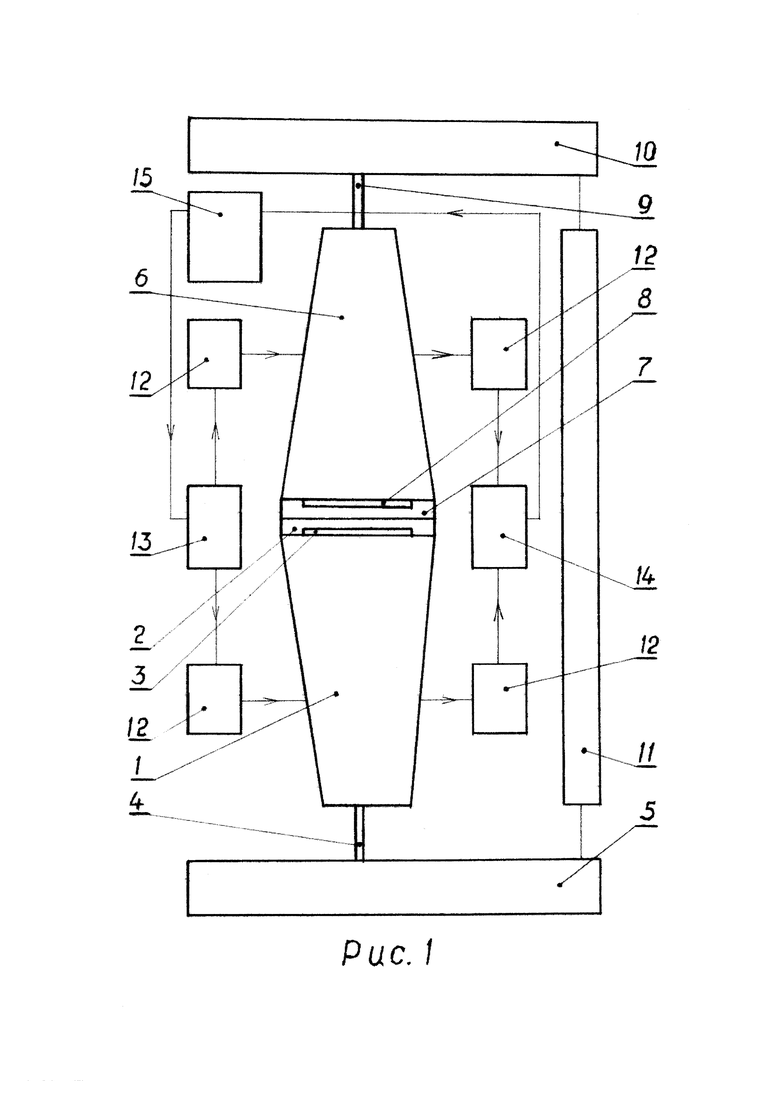
На рис. 1 изображен УНА, состоящий из двух ПУ с элементами их крепления к частям объекта: ПУН 1 и ПУВ 6, широкие основания 2,7 которых жестко соединены и имеют ПУА 3,8, a PO находятся под максимальным рабочим давлением, и содержащий УПУ 12, РВД 13, РНД 14, компрессор 15, ЭРПУ 11, защищаемую 10 и подверженную воздействию внешних сил 5 части объекта. Стрелками показано направление движения рабочего агента. Датчики, отслеживающие заданные параметры работы УНА, ЭУ и источник электрической энергии не показаны.
УНА работает следующим образом.
ПУН 1 с основанием 2, содержащим ПУА 3, посредством элемента крепления 4 жестко соединяется с частью объекта, подверженной воздействию внешних сил 5, а ПУВ 6 с основанием 7, содержащим ПУА 8, через элемент крепления 9 жестко соединяется с защищаемой частью объекта 10. ПУН 1 и ПУВ 6 жестко соединяются своими основаниями 2,7 и содержат ПУА 3,8. ПУА 3,8 при аварии ПУН 1, ПУВ 6 сигналом ЭУ наполняются рабочим агентом из РВД 13 через управляемые вентили (на рис. не показаны). Между частями объекта 5 и 10 устанавливается ЭРПУ 11, имеющее с ними жесткую связь.
Демпфирование осуществляется ЭУ, имеющим управляющую память и логику формирования управления, генерирующим все необходимые управляющие сигналы, путем механического трения в ЭРПУ 11 и перепускания рабочего агента из рабочих объемов ПУН 1 и ПУВ 6 через УПУ 12 в РВД 13 и РНД 14, соединенных с выходом и входом компрессора 15 с целью многократного использования рабочего агента.
При ходе сжатия согласно выбранной в работу демпферной характеристики ЭУ своими командами на УПУ 12 снижает рабочее давление в ПУН 1 и в ПУВ 6 на необходимую величину для каждого объема, а командой ЭРПУ 11 уменьшает величину прижимного усилия его тормозных колодок на поверхность его тормозного стержня, вплоть до полного его снятия, и тем самым обеспечивает оптимальную величину отклонения защищаемой части объекта 10 от воздействия на нее подвижной части объекта 5, воспринимающей колебания извне.
При ходе отбоя ЭУ, обработав сигналы от датчиков, определяет в каждый конкретный момент времени работы УНА оптимальную величину усилия сопротивления возвратному движению подвижной части объекта 5 и выдает согласно заданной демпферной характеристике командные сигналы на соответствующие УПУ 12 для создания необходимого рабочего давления в ПУН 1 и ПУВ 6 и прижимного усилия соответствующей величины на ЭРПУ 11, которое соответственно регулирует величину необходимого трения для данного момента времени между рабочими поверхностями ЭРПУ 11. Так выполняется гашение механических колебаний автоматически или согласно запущенной водителем ТС в работу демпферной характеристики из имеющегося в памяти ЭУ пакета программ для разных дорожных условий и скорости движения ТС.
Управляющими сигналами ЭУ при выходе из строя ПУН 1 наполняется рабочим агентом до рабочего давления ПУА 3, а при выходе из строя ПУВ 6 - ПУА 8 из РВД 13 через вентили (на рис. не показаны), управляемые ЭУ.
ЭУ снабжается программой, устраняющей крен на поворотах посредством перепускания рабочего агента и использования механического трения.
При проведении погрузо-разгрузочных работ ТС укладывается на грунт путем снижения рабочего давления в ПУН 1 и ПУВ 6 при условии применения в них КПС с необходимой для этого жесткостью.
При изменении веса перевозимого груза дорожный просвет сохраняется постоянным путем увеличения рабочих давлений в ПУН 1 и ПУВ 6 до требуемых для этого величин.
Суммарный рабочий ход ПУН 1 и ПУВ 6 рассчитывается таким, чтобы обеспечить в месте расположения колеса для возможности его замены без домкрата дорожный просвет необходимой величины.
При движении по бездорожью водитель имеет возможность управлять любой УНА независимо от остальных.
Вторая указанная задача решается способом получения дополнительных функциональных возможностей к имеющимся у упругих элементов подвесок ТС, уже находящихся в эксплуатации, заключающимся в получении отдельно каждым из них независимого управляемого дополнительного рабочего хода и в управлении работой отдельно каждого из них по программам, заложенным в память ЭУ, имеющего управляющую память и логику формирования управления, генерирующего все необходимые управляющие сигналы.
Вторая указанная задача решается также путем применения несущих управляемых приставок (НУП), увеличивающих функциональные возможности подвески ТС методом установки на торцах уже существующих упругих элементов, расположенных на находящихся в эксплуатации ТС, дополнительных компактных упругих элементов в виде электронно-управляемых приставок НУП, придающих упругим элементам подвески дополнительный регулируемый рабочий ход, путем преобразования конструкции амортизатора ПНУПА аналогично, как и у УНА. НУП имеет все достоинства УНА и отличается от него своим назначением в качестве дополнительного компактного оборудования к уже существующим подвескам современных транспортных средств, отсутствием возможности укладывания ТС на грунт и возможностью не использовать в качестве демпфирующих элементов ЭРПУ, ограничившись использованием амортизаторов, находящихся в эксплуатации на ТС. Другими словами, НУП представляет собой одиночное ПУ или устройство, состоящее из нескольких ПУ, объединенных одной целью, управление работой которых осуществляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, в памяти которого имеются программы, обеспечивающие увеличение функциональных возможностей подвески ТС, находящихся в эксплуатации. При этом конструкция НУП может быть разработана как для применения на нескольких моделях ТС, так и для каждой модели ТС отдельно.
Если конструкция НУП в полностью сжатом состоянии позволяет, чтобы ее витки не соприкасались с частями ТС, то
HНУП=2 L1+ L2+ L3,
где HНУП - высота в сложенном состоянии в месте соединения с частями ТС,
L1 - толщина ЭО,
L2 - толщина нижнего основания,
L3 - толщина верхнего основания.
При необходимости можно сконструировать специальные основания, чтобы уменьшить величину ННУП на величину 2L1.
После установки НУП на ТС величина дорожного просвета увеличивается минимально на величину толщины суммы его оснований при условии, если витки не мешают ее установки на рабочее место.
Если принять величину L1 от 2 до 3 мм, а величину L2=L3= от 4 до 5 мм, то ННУП будет равна от 12 до 16 мм. То есть высота НУП для разных легковых ТС будет равна примерно от 8 до 16 мм и установка ее на них незначительно увеличит дорожный просвет, т.е. существенно не изменит рассчитанные производителем ходовые качества и безопасность ТС.
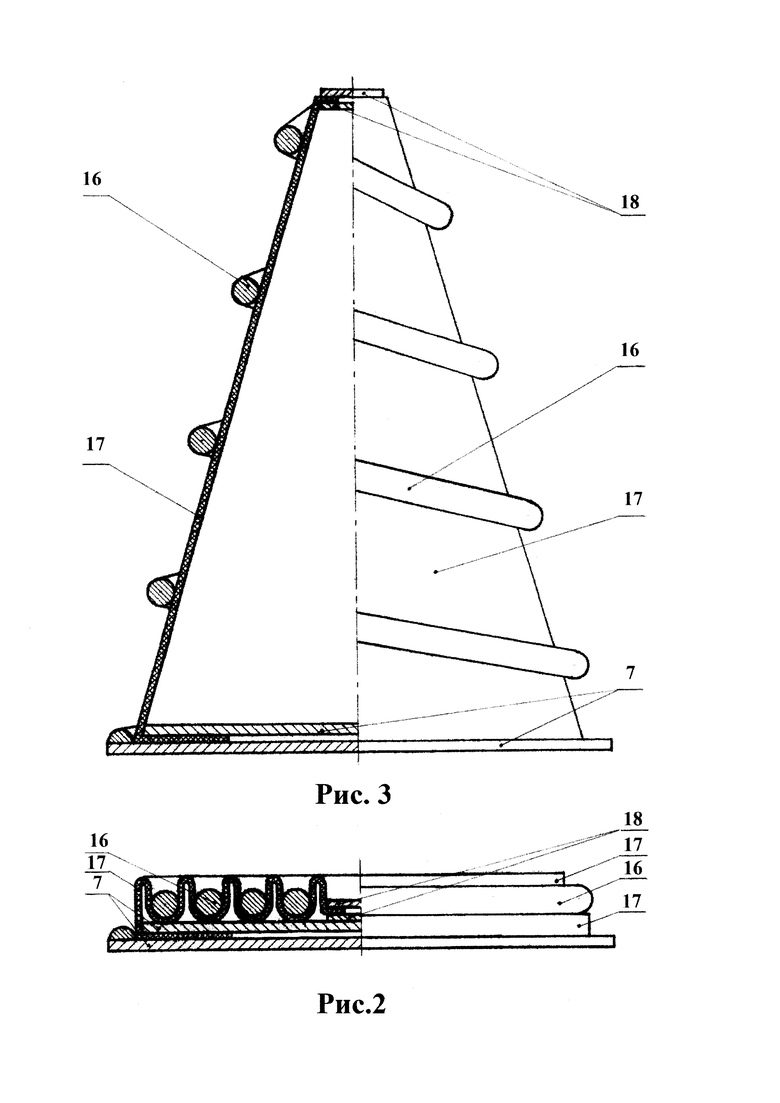
На рис. 2 изображен НУП в состоянии полного сжатия, содержащий КПС 16, ВЭО 17 и их общие основания: верхнее 18 и нижнее 7. Перепускные отверстия для связи с УПУ и далее с резервуарами низкого и высокого давлений на рисунке не показаны.
На рис. 3 показан НУП в состоянии наибольшего допустимого рабочего растяжения, содержащий КПС 16, ВЭО 17 и их общие основания: верхнее 18 и нижнее 7. Перепускные отверстия для связи с УПУ и далее с резервуарами низкого и высокого давлений на рисунке не показаны.
НУП работает следующим образом.
В сложенном состоянии КПС 16 укладывается в одной плоскости в виде спирали, верхнее основание 18 и нижнее основание 7 сведены на близкое расстояние, боковая поверхность ВЭО 17 равномерно расположена между витками КПС 16. Когда возникает необходимость использовать дополнительные функциональные возможности, которыми обладает НУП, водитель перед началом движения ТС вручную или автоматически устанавливает величину рабочего дорожного просвета, исходя из рабочих дорожных условий и скорости движения, путем наполнения рабочего объема ВЭО 17 рабочим агентом до требуемого давления, при этом витки КПС 16 расходятся, а основания 18 и 7 раздвигаются. При ходе сжатия ЭУ своей командой на УПУ уменьшает рабочее давление в рабочем объеме ВЭО 17, а установленный на ТС амортизатор работает по присущей ему демпферной характеристике и тем самым обеспечивает наименьшую величину отклонения защищаемой части объекта от воздействия на нее подвижной части объекта, воспринимающей колебания извне. При ходе отбоя работает амортизатор ТС, а ЭУ НУП, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, обработав сигналы от датчиков, определяет в каждый конкретный момент времени работы НУП оптимальную величину усилия сопротивления возвратному движению подвижной части объекта и выдает согласно заданной демпферной характеристике команду-сигнал соответствующей величины для этого момента времени на соответствующие УПУ. Так выполняется электронно-управляемое регулирование перепусканием рабочего агента из рабочего объема ВЭО 17 в РВД и РНД и согласно запущенной водителем ТС в работу демпферной характеристики из имеющегося в памяти ЭУ пакета программ для разных дорожных условий и скорости движения ТС в автоматическом режимеили в ручном управлении, когда одну из них выбирает водитель.
При изменении веса перевозимого груза ЭУ автоматически поддерживает установленный водителем дорожный просвет путем изменения рабочего давления в рабочем объеме ВЭО 17 до требуемой величины с ограничением применения этой функции, начиная с момента, когда вес достигает значения, при котором наименьшая величина рабочего хода штатного амортизатора становится меньше допустимой рабочей величины.
При выполнении поворотов специальная программа, имеющаяся в памяти ЭУ, устанавливает в соответствующих НУП необходимые давления, препятствующие крену, перепусканием рабочего агента через УПУ в РВД и РНД. Эта функция эффективнее действует при замене штатного амортизатора, находящегося в эксплуатации ТС, на АЭР, снабженный для этого специально созданной программой, обеспечивающей необходимую фиксацию положения кузова ТС при прохождении поворота.
ЭУ содержит программы для получения требуемого наклона кузова ТС в разные стороны путем независимой установки необходимых рабочих давлений в разных НУП с целью проведения погрузочно-разгрузочных работ, замены поврежденного колеса на запасное, препятствованию опрокидыванию и увеличению проходимости по бездорожью.
Первая и вторая задачи также решаются в несущей управляемой конической телескопической пружине сжатия с прямоугольным сечением витков (НУК), представляющей собой устройство, подобное ПУ в УНА и НУП, в котором при высокой чистоте обработки боковых поверхностей КПС, обеспечивающих создание герметичного рабочего объема внутри конструкции, состоящей из КПС и прикрепленных к ней оснований, отсутствует ВЭО. При этом первый и последний витки делаются толще, выполняются каждый в виде замкнутых колец, которые герметично объединяются с основаниями, а шаг витков берется такой, чтобы обеспечить герметичность рабочего объема внутри полученной конструкции. При необходимости конструкция обеспечивается смазкой.
Работа НУК аналогична работе ПУ в УНА и НУП.
НУК может работать с использованием разных рабочих агентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТОЙ НЕСУЩИЙ УПРАВЛЯЕМЫЙ ПНЕВМОАМОРТИЗАТОР | 2009 |
|
RU2413104C1 |
| АМОРТИЗАТОР ЭЛЕКТРОННО-РЕГУЛИРУЕМЫЙ "АЭР" | 2012 |
|
RU2524773C2 |
| ПЕРЕНОСНОЙ МАЛОГАБАРИТНЫЙ ПНЕВМАТИЧЕСКИЙ ДОМКРАТ | 2017 |
|
RU2649254C1 |
| ЭЛЕКТРОННО-РЕГУЛИРУЕМЫЙ РЕССОРНЫЙ АМОРТИЗАТОР | 2010 |
|
RU2456487C2 |
| Устройство для формирования адреса данных | 1984 |
|
SU1203527A1 |
| Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос | 2016 |
|
RU2647336C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2021 |
|
RU2764481C1 |
| УПРАВЛЯЕМОЕ УПРУГОЕ УСТРОЙСТВО ПОПОВА-ХАРИНА | 2018 |
|
RU2702467C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КЛИРЕНСОМ ТРАНСПОРТНОГО СРЕДСТВА С БОЛЬШИМ КОЛИЧЕСТВОМ ВХОДНЫХ СИГНАЛОВ | 2008 |
|
RU2391222C2 |
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1988 |
|
SU1587465A1 |
Группа изобретений относится к области гашения механических колебаний, в частности, в подвесках транспортных средств. Способ управления жесткостью несущего упругого элемента заключается в использовании внутреннего пространства пружины, способной при полном сжатии укладываться в одной плоскости. Создается рабочий объем, позволяющий в совокупности с жесткостью самой пружины сделать общую жесткость переменной и регулируемой по программам, заложенным в электронное устройство. Несущий управляемый амортизатор содержит единую конструкцию из конической пружины сжатия и герметичной высокопрочной эластичной оболочки или нескольких таких пружин с оболочками, соединенных через управляемые перепускные устройства с резервуарами низкого и высокого давления. Электронно-регулируемые прижимные устройства имеют тормозные колодки с приводом и тормозные стержни. Работой амортизатора управляет электронное устройство. Несущая управляемая приставка предназначена для использования в качестве устройства, дополняющего конструкцию упругого элемента подвески. В качестве демпфирующих элементов используются штатные амортизаторы. Несущее управляемое устройство содержит замкнутый рабочий объем, образованный конической пружиной сжатия. Первый и последний витки пружины выполняются в виде замкнутых колец и жестко соединяются с основаниями устройства с образованием герметичного внутреннего объема или нескольких таких объемов, соединенных через управляемые перепускные устройства с резервуарами низкого и высокого давления. Электронно-регулируемые прижимные устройства имеют тормозные колодки с приводом и тормозные стержни. Работой управляет электронное устройство. Несущее управляемое устройство-приставка предназначено для использования в качестве дополняющего конструкцию упругого элемента подвески. В качестве демпфирующих элементов используются штатные амортизаторы. Достигается увеличение рабочего хода подвески, изменение высоты дорожного просвета в широких пределах, а также возможность регулировки характеристик амортизатора. 5 н. и 9 з.п. ф-лы, 3 ил.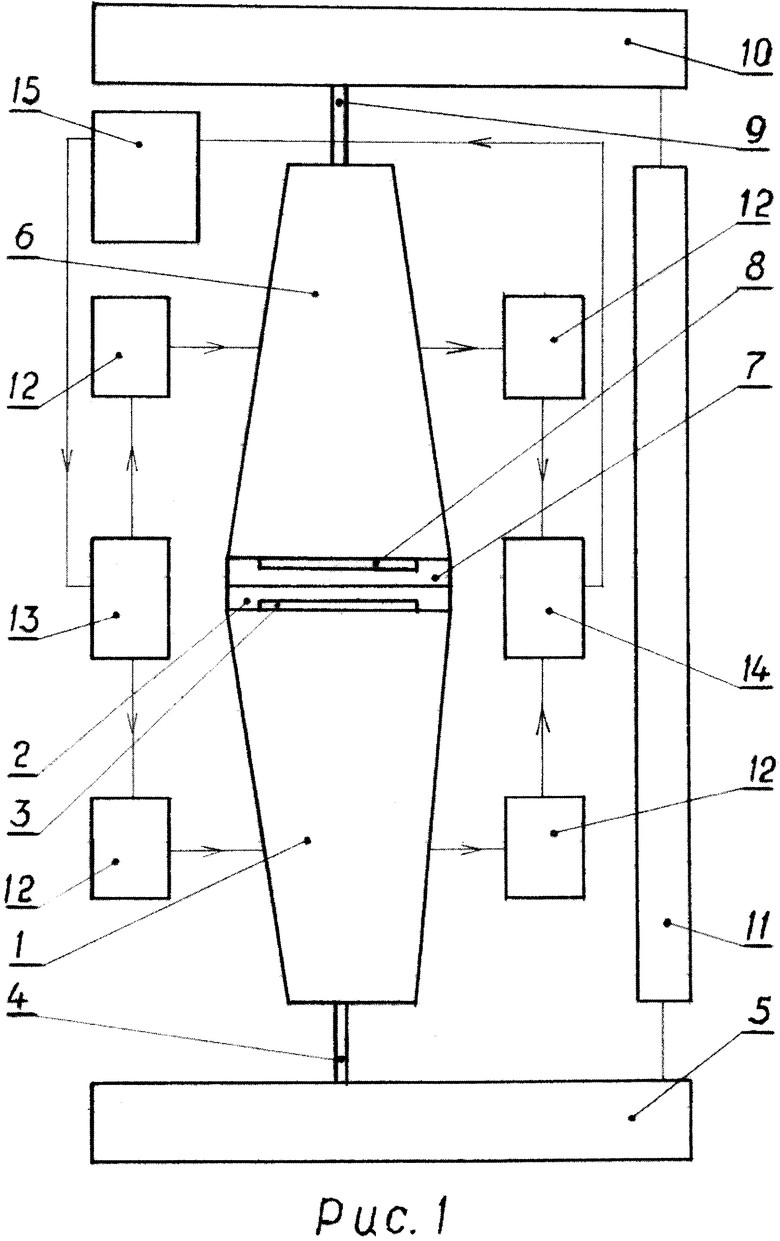
1. Способ управления жесткостью несущего упругого элемента подвески ТС, заключающийся в использовании внутреннего пространства способной при полном сжатии укладываться в одной плоскости пружины для создания рабочего объема, позволяющего в совокупности с жесткостью самой пружины сделать их общую жесткость переменной и регулируемой с целью получении регулируемого и изменяющегося в широких пределах управляемого рабочего хода несущего упругого элемента, способного помимо эффективного гашения колебаний обеспечивать всевозможные управляемые наклоны ТС и его дорожный просвет любой требуемой величины по программам, заложенным в электронное устройство (ЭУ), имеющее управляемую память и логику формирования управления, генерирующее все необходимые управляющие сигналы.
2. Способ по п. 1, отличающийся тем, что предназначается для использования в качестве создания дополнительных возможностей в работе находящейся в эксплуатации на ТС подвеске путем прибавления к рабочему ходу его упругого элемента дополнительного рабочего хода требуемой величины кроме возможности укладывания ТС на грунт.
3. Несущий управляемый амортизатор (НУА), способный автоматически поддерживать величину дорожного просвета ТС, содержащий замкнутый рабочий объем, прижимное устройство (ПУ), содержащее привод с прижимными колодками, компрессор, ко входу и выходу которого подсоединены резервуары с низким и высоким давлениями рабочего агента и устройствами его автоматического впуска и выпуска из замкнутого рабочего объема, работой которых управляет процессор с помощью датчиков, постоянно отслеживающих заданные рабочие параметры амортизатора согласно программам, заложенным в него с одной или рядом демпферных характеристик, отличающийся тем, что замкнутый рабочий объем представляет собой одну единую конструкцию пружины с оболочкой (ПУ) из конической пружины сжатия (КПС) и герметичной высокопрочной эластичной оболочки (ВЭО) или нескольких таких замкнутых объемов, представляющих одну общую конструкцию из ПУ, соединенных через управляемые перепускные устройства (УПУ) с резервуарами низкого давления (РНД) и высокого давления (РВД), а устройство с тормозными колодками представляет собой одно или несколько электронно-регулируемых прижимных с элементами крепления к частям объекта устройств (ЭРПУ), имеющих тормозные колодки с приводом и тормозные стержни любой требуемой формы, работой НУА управляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, имеющее одну или набор рабочих программ с рядом заданных для разных дорожных условий и режимов езды амортизационных характеристик в автоматическом и ручном управлении, включаемых в работу по выбору водителя, а также имеющее программу или программы управления дорожным просветом при ремонтных, погрузо-разгрузочных работах, при изменении веса перевозимого груза, при выходе из трудных дорожных ситуаций и для устранения опасного крена при поворотах, к тому же может иметь программу, обеспечивающую регулировку жесткости до предельных значений, позволяющих укладывать ТС на грунт, выполнять замену колеса без домкрата, обеспечивать необходимый наклон кузова для облегчения разгрузки сыпучего груза в стороны и назад.
4. Амортизатор (НУА) по п. 3, отличающийся тем, что витки КПС могут встраиваться в положении ее наибольшего растяжения внутрь стенки ВЭО, образуя одно целое, а стенка может армироваться металлической сеткой.
5. Амортизатор (НУА) по п. 3, отличающийся тем, что ПУ может состоять из двух герметичных РО под разным рабочим давлением, объединенных общим основанием в узкой или широкой части, что позволяет путем электронного управления работой УНА эффективнее гасить колебания в более широком частотном спектре.
6. Амортизатор (НУА) по п. 3, отличающийся тем, что КПС может иметь специальную сложную форму витков, дающую возможность рационально использовать пространство в месте установки УНА на ТС, с целью получения наибольшего рабочего объема ПУ и тем самым увеличения пределов изменения ее жесткости.
7. Амортизатор (НУА) по п. 3, отличающийся тем, что ПУ может снабжаться добавочной ВЭО для обеспечения рабочего дорожного просвета в аварийных случаях путем быстрого автоматического наполнения ее объема рабочим агентом из РВД до требуемого значения.
8. Несущая управляемая приставка (НУП), способная автоматически поддерживать величину дорожного просвета ТС, содержащая замкнутый рабочий объем, компрессор, ко входу и выходу которого подсоединены резервуары с низким и высоким давлениями рабочего агента и устройствами его автоматического впуска и выпуска из замкнутого рабочего объема, работой которых управляет процессор с помощью датчиков, постоянно отслеживающих заданные рабочие параметры амортизатора согласно программам, заложенным в него с одной или рядом демпферных характеристик, отличающаяся тем, что замкнутый рабочий объем представляет собой одну единую конструкцию пружины с оболочкой (ПУ) из конической пружины сжатия (КПС) и герметичной высокопрочной эластичной оболочки (ВЭО) или нескольких таких замкнутых объемов, представляющих одну общую конструкцию из ПУ, соединенных через управляемые перепускные устройства (УПУ) с резервуарами низкого давления (РНД) и высокого давления (РВД), работой НУП управляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, имеющее одну или набор рабочих программ с рядом заданных для разных дорожных условий и режимов езды амортизационных характеристик в автоматическом и ручном управлении, включаемых в работу по выбору водителя, а также имеющее программу или программы управления дорожным просветом при ремонтных, погрузо-разгрузочных работах, при изменении веса перевозимого груза, при выходе из трудных дорожных ситуаций и для устранения опасного крена при поворотах, к тому же может иметь программу, обеспечивающую регулировку жесткости до предельных значений при замене колеса без домкрата, а также при разгрузке сыпучего груза в стороны и назад, при этом НУП предназначена для использования в качестве малогабаритного устройства, дополняющего конструкцию упругого элемента подвески ТС, уже находящихся в эксплуатации, посредством установки на торцах упругих элементов, используя в качестве демпфирующих элементов их штатные амортизаторы.
9. Приставка (НУП) по п. 8, отличающаяся тем, что витки КПС могут встраиваться в положении ее наибольшего растяжения внутрь стенки ВЭО, образуя одно целое, а стенка может армироваться металлической сеткой.
10. Приставка (НУП) по п. 8, отличающаяся тем, что ПУ может состоять из двух герметичных РО под разным рабочим давлением, объединенных общим основанием в узкой или широкой части, что позволяет путем электронного управления работой УНА эффективнее гасить колебания в более широком частотном спектре.
11. Приставка (НУП) по п. 8, отличающаяся тем, что КПС может иметь специальную сложную форму витков, дающую возможность рационально использовать пространство в месте установки УНА на ТС, с целью получения наибольшего рабочего объема ПУ и тем самым увеличения пределов изменения ее жесткости.
12. Приставка (НУП) по п. 8, отличающаяся тем, что ПУ может снабжаться добавочной ВЭО для обеспечения рабочего дорожного просвета в аварийных случаях путем быстрого автоматического наполнения ее объема рабочим агентом из РВД до требуемого значения.
13. Несущее управляемое устройство (НУУ), способное автоматически поддерживать величину дорожного просвета ТС, содержащее замкнутый рабочий объем, прижимное устройство (ПУ), содержащее привод с прижимными колодками, компрессор, ко входу и выходу которого подсоединены резервуары с низким и высоким давлениями рабочего агента и устройствами его автоматического впуска и выпуска из замкнутого рабочего объема, работой которых управляет процессор с помощью датчиков, постоянно отслеживающих заданные рабочие параметры амортизатора согласно программам, заложенным в него с одной или рядом демпферных характеристик, отличающееся тем, что замкнутый рабочий объем образован конической пружиной сжатия (КПС), первый и последний витки которой выполняются в виде замкнутых колец и жестко соединяются с основаниями устройства с образованием герметичного внутреннего объема или нескольких таких объемов, представляющих одну общую конструкцию, соединенных через управляемые перепускные устройства (УПУ) с резервуарами низкого давления (РНД) и высокого давления (РВД), а устройство с тормозными колодками представляет собой одно или несколько электронно-регулируемых прижимных с элементами крепления к частям объекта устройств (ЭРГГУ), имеющих тормозные колодки с приводом и тормозные стержни любой требуемой формы, работой НУУ управляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, имеющее одну или набор рабочих программ с рядом заданных для разных дорожных условий и режимов езды амортизационных характеристик в автоматическом и ручном управлении, включаемых в работу по выбору водителя, а также имеющее программу или программы управления дорожным просветом при ремонтных, погрузо-разгрузочных работах, при изменении веса перевозимого груза, при выходе из трудных дорожных ситуаций и для устранения опасного крена при поворотах, к тому же может иметь программу, обеспечивающую регулировку жесткости до предельных значений, позволяющих укладывать ТС на грунт, выполнять замену колеса без домкрата, обеспечивать необходимый наклон кузова для облегчения разгрузки сыпучего груза в стороны и назад.
14. Несущее управляемое устройство-приставка (НУУП), способное автоматически поддерживать величину дорожного просвета ТС, содержащее замкнутый рабочий объем, компрессор, ко входу и выходу которого подсоединены резервуары с низким и высоким давлениями рабочего агента и устройствами его автоматического впуска и выпуска из замкнутого рабочего объема, работой которых управляет процессор с помощью датчиков, постоянно отслеживающих заданные рабочие параметры амортизатора согласно программам, заложенным в него с одной или рядом демпферных характеристик, отличающаяся тем, что замкнутый рабочий объем образован конической пружиной сжатия (КПС), первый и последний витки которой выполняются в виде замкнутых колец и жестко соединяются с основаниями устройства с образованием герметичного внутреннего объема или нескольких таких объемов, представляющих одну общую конструкцию, соединенных через управляемые перепускные устройства (УПУ) с резервуарами низкого давления (РНД) и высокого давления (РВД), работой НУУП управляет ЭУ, имеющее управляющую память и логику формирования управления, генерирующее все необходимые управляющие сигналы, имеющее одну или набор рабочих программ с рядом заданных для разных дорожных условий и режимов езды амортизационных характеристик в автоматическом и ручном управлении, включаемых в работу по выбору водителя, а также имеющее программу или программы управления дорожным просветом при ремонтных, погрузо-разгрузочных работах, при изменении веса перевозимого груза, при выходе из трудных дорожных ситуаций и для устранения опасного крена при поворотах, к тому же может иметь программу, обеспечивающую регулировку жесткости до предельных значений при замене колеса без домкрата, а также при разгрузке сыпучего груза в стороны и назад, при этом НУУП предназначена для использования в качестве малогабаритного устройства дополняющего конструкцию упругого элемента подвески ТС, уже находящихся в эксплуатации, посредством установки на торцах упругих элементов, используя в качестве демпфирующих элементов их штатные амортизаторы.
| ПРОСТОЙ НЕСУЩИЙ УПРАВЛЯЕМЫЙ ПНЕВМОАМОРТИЗАТОР | 2009 |
|
RU2413104C1 |
| ПОДВЕСКА КОЛЕС АВТОМОБИЛЯ С ИСПОЛЬЗОВАНИЕМ ПРУЖИНЫ В КОМБИНАЦИИ С ГИБКОЙ ОПРАВОЙ ДЛЯ ИЗМЕНЕНИЯ ЕЕ КРИВОЙ ЖЕСТКОСТИ | 1997 |
|
RU2194627C2 |
| ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО | 2006 |
|
RU2324086C1 |
| JP S6049145 A, 18.03.1985 | |||
| US 5364086 A, 15.11.1994. | |||

