Изобретение относится к испытанию на механическую нагрузку трубчатых образцов.
Здесь под "трубчатым образцом" понимается любая труба или система труб, соединенных между собой, например, с помощью муфты. Следовательно, речь может идти либо о единственной трубе, либо о двух трубах, соединенных любыми средствами, например сваркой, либо также о двух трубах, содержащих соответственно наружную и внутреннюю резьбу и соединенных резьбовым соединением, образованным этими наружной и внутренней резьбой, ввинченными одна в другую, либо также из двух труб, каждая из которых снабжена наружной резьбой, и соединенных друг с другом посредством резьбового соединения, состоящего из муфты, снабженной внутренней резьбой с двух сторон.
Кроме того, под "трубой" здесь понимается трубчатый элемент, предназначенный для применения в условиях эксплуатации повышенной сложности с точки зрения давления, и/или механических нагрузок, и/или коррозии, и/или температуры, то есть при его эксплуатации на нефтяных скважинах или на нефтеперерабатывающих предприятиях. Таким образом, речь может идти, например, о трубах для добычи (или "бурильных трубах"), или о трубах без сварных швов, гладких или с резьбой, для крепления скважины (или "обсадных трубах"), или трубах для добычи нефти или газа (или "тюбинга"), или канализации, или также о трубопроводе.
Чтобы воспроизвести эквивалентное качество при разных комбинациях статических нагрузок, прикладываемых к трубчатому образцу, специалист использует обычно эллипс, называемый эллипсом Мизеса, две основные оси которого представляют соответственно осевую нагрузку и давление, прикладываемое к указанному образцу, причем указанная осевая нагрузка может включать в себя сжатие, растяжение или изгиб.
Для лабораторного исследования характеристик трубчатых образцов в условиях одновременного приложения широкого спектра нагрузок, специалист использует установку, содержащую стенд для испытаний нагрузкой (называемый машиной для испытаний на усталость, когда он производит динамические нагрузки), и отображает стойкость к указанным комбинациям нагрузок с помощью эллипса Мизеса.
Из известных установок статического нагружения можно назвать, в частности, во-первых, установки, которые включают введение жидкой или газовой среды под давлением внутрь трубчатого образца, концы которого закреплены с заглушками, во-вторых, установки, которые включают применение домкратов, помещенных внутри или снаружи трубчатого образца, и в-третьих, установки, которые состоят в комбинации двух предыдущих типов.
В установках, в которых внутри образца используется среда под давлением, трубчатый образец испытывает одновременно растяжение и давление. Это приводит к тому, что внутренняя среда под давлением вызывает не только давление (по существу радиальное) на внутренние стенки трубчатого образца, но также давление (по существу по оси) на концевые заглушки, что вызывает осевое растяжение трубчатого образца. Поскольку интенсивность растяжения пропорциональна давлению, когда давление меняют, то тем самым в той же пропорции меняют и растяжение. Следовательно, в установках такого типа нельзя исследовать влияние давления независимо от влияния растяжения. Поэтому такой тип установок позволяет исследовать не любую комбинацию давления и осевого растяжения, а только комбинацию, которая может быть смоделирована сегментом большой оси эллипса Мизеса.
В установках, в которых используется внутренний или внешний домкрат, трубчатый образец испытывает только чисто осевое растяжение. Таким образом, установки этого типа не позволяют исследовать влияния чистого давления, как и любых комбинаций давления и осевого растяжения, но позволяют исследовать только комбинацию, моделируемую сегментом оси абсцисс (X) плоскости отображения эллипса Мизеса.
Установка, использующая одновременно домкрат и внутреннюю среду под давлением, позволяет описать по меньшей мере часть плоскости отображения эллипса Мизеса, но за счет сложности установки.
Кроме того, представленные выше установки позволяют прикладывать к образцам только статическую нагрузку. То есть установки этого типа не позволяют воспроизводить определенные сложные условия эксплуатации, налагающие дополнительно динамические нагрузки, как, например, условия, которые встречаются у структур, состоящих из труб и соединений, соединяющих платформу в открытом море с устьем буровой скважины, которая может быть удалена на несколько километров, или те, что встречаются у сходных структур, в скважинах, отклоняющихся от вертикали, требующих вращения колонны. Такие структуры подвергаются, в частности, циклическим изгибающим нагрузкам, возможно, добавляющимся к статическим нагрузкам внутренним давлением и/или осевому растяжению. Тогда для испытания образцов на динамические нагрузки применяют установку, называемую также стендом для измерения на усталость.
Таким образом, задачей изобретения является разработка альтернативы статическим установкам, в которых одновременно используются домкрат и находящаяся под давлением среда, и возможность при необходимости испытать образцы динамическим способом.
Для этого в изобретении предлагается установка механического нагружения трубчатого образца, содержащая по меньшей мере один пакер (или "забойник", или также "наконечник"), установленный в образец на уровне зоны испытаний, имеющий продольный размер выше протяженности зоны испытаний и содержащий, во-первых, первое средство создания давления, предназначенное для локального изменения диаметра по меньшей мере первой части пакера, для его прижатия к внутренней поверхности образца на уровне зоны испытаний, во-вторых, второе средство создания давления, которое предназначено для прикладывания первого выбранного внутреннего давления на часть внутренней поверхности образца, находящейся на уровне второй части пакера, и/или в-третьих, третье средство создания давления, призванное действовать совместно с по меньшей мере одним перекрывающим элементом, скрепленным с образцом на некотором расстоянии от края пакера, для задания зоны воздействия, в которой на образец воздействует второе выбранное внутреннее давление, независимое от первого давления.
Установка согласно изобретению может включать дополнительные характеристики, которые могут быть взяты по отдельности или в комбинации, и в частности:
- по меньшей мере один тензометр, помещенный в выбранное место наружной поверхности образца и выдающий результаты первых измерений напряжений, характеризующих напряженное состояние, испытываемое образцом в выбранном месте;
- по меньшей мере два тензометра, размещенные в двух разных выбранных местах наружной поверхности и выдающие результаты первых измерений напряжений, характеризующих напряженное состояние, испытываемое образцом на уровне двух выбранных мест;
- искомая деформация изгибом соответствует, например, первым, начальным, базовым измерениям;
- два опорных средства, предназначенных для поддержки образца, ротационный двигатель в паре с устройством возбуждения, оборудованным устройством со смещенным центром масс, соединенным с одним краем образца и задающим противовес, и средства управления, отдающие двигателю команду привести во вращение эксцентриковую массу, с регулируемой скоростью, для того, чтобы сообщить образцу выбранное вибрационное возбуждение, в функции от противовеса, чтобы циклически деформировать образец изгибом;
- по меньшей мере одно из опорных средств может быть устроено так, чтобы его положение (или их соответствующие положения) по существу соответствовали узлу или узлам колебаний образца;
- средства управления могут в таком случае быть предназначены для установления скорости вращения двигателя в зависимости от амплитуды напряжения, характеризующей напряжение изгиба, которое хотят приложить к образцу;
- по меньшей мере одна пара акселерометров, смещенных на 90° друг относительно друга, в выбранных местах наружной поверхности образца, выдающая вторые измерения, характеризующие смещение образца. В этом случае средства управления производят подбор скорости вращения двигателя в зависимости от результатов указанных вторых измерений, выданных парой акселерометров, чтобы амплитуда радиального смещения из-за испытываемого образцом изгиба в выбранном месте оставалась по существу постоянной;
- по меньшей мере две другие пары акселерометров. В этом случае акселерометры каждой другой пары находятся под углом 90° друг к другу в других выбранных местах наружной поверхности образца и выдают другие вторые измерения, сделанные на уровне других выбранных мест и характеризующие смещения, испытываемые образцом в других выбранных местах. Средства управления могут комбинировать эти вторые измерения, для установления скорости вращения двигателя в зависимости от этих комбинаций так, чтобы амплитуда смещения из-за изгиба, испытываемого образцом в выбранных местах, оставалась по существу постоянной;
- когда трубчатый образец состоит из по меньшей мере двух трубчатых элементов, соединенных между собой на уровне зоны испытаний, предпочтительно устанавливать две пары акселерометров с одной и другой стороны соединения;
- средства управления могут быть предназначены для сравнения результатов по меньшей мере последних вторых измерений, выдаваемых по меньшей мере одной из пар акселерометров, со вторыми базовыми измерениями, характеризующими начальную амплитуду смещения, соответствующую искомой амплитуде смещения из-за изгиба, в выбранном месте, и для установления скорости вращения двигателя в зависимости от результата сравнения;
- средства управления могут быть предназначены для определения относительного отклонения амплитуды смещения (представленной последними вторыми измерениями) от искомой амплитуды смещения из-за изгиба, и для сравнения этих отклонений с границами допустимого интервала, называемого диапазоном регулирования, чтобы подстроить скорость вращения двигателя, когда отклонение превышает указанный диапазон регулирования;
- устройство обнаружения вращения (или поворота, или цикла), предназначенное для обнаружения любого вращения (или поворота, или цикла), вызываемого двигателем, которое может, например, посылать на средства управления сигнал, характеризующий каждое обнаруженное вращение, для обеспечения возможности подстраивать скорость вращения двигателя всякий раз, когда число полученных сигналов станет равным выбранному числу;
- средство управления, в ходе испытания, может быть предназначено для направления на нагрузку команды двигателю привести во вращение эксцентриковую массу при выбранной последовательности скоростей вращения, чтобы подвергнуть образец выбранной последовательности вибрационных возбуждений;
- пакер может содержать по существу недеформируемую основу, на которую устанавливается кольцевая деформируемая мембрана. В этом случае первое средство создания давления содержит первую схему подачи среды, предназначенную для ввода выбранной среды (например, жидкости под давлением) между по существу недеформируемой основой и мембраной, чтобы установить выбранное давление;
- второе средство создания давления может включать в себя вторую схему подачи среды (например, газа), содержащую выходное отверстие для среды, открывающееся напротив внутренней поверхности образца, чтобы установить первое выбранное внутреннее давление;
- эта вторая схема подачи среды может, например, проходить через мембрану с сохранением герметичности;
- средство обнаружения утечки, размещенное вблизи наружной поверхности образца в зоне испытаний, предназначенное для обнаружения возможной утечки среды (подаваемой второй схемой подачи) по периметру образца;
- третье средство создания давления может содержать третью схему подачи среды, способную вводить среду (например, жидкость под давлением) в каждую зону воздействия, чтобы подвергнуть образец второму выбранному внутреннему давлению;
- устройство переключения, соединенное с первой и третьей схемами подачи среды, и насос, соединенный с устройством переключения;
- основа пакера (или наконечника) является, например, трубой, образующей полую центральную линию, которая ограничивает часть третьей схемы подачи среды и которая имеет два противоположных конца, по меньшей мере один из которых входит в зону воздействия, для подачи в нее среды;
- два перекрывающих устройства, установленные на расстоянии от двух концов пакера, для задания по меньшей мере одной зоны воздействия, в которой образец подвергается второму выбранному внутреннему давлению;
- часть первой схемы подачи среды и/или часть второй схемы подачи среды может находиться внутри центральной линии;
- по меньшей мере один датчик температуры, установленный в выбранном месте образца и выдающий третьи результаты измерений, характеризующие температуру образца в этом выбранном месте;
- по меньшей мере один датчик давления, предназначенный для установки в выбранное место образца и выдающий четвертые результаты измерений, характеризующие внутреннее давление образца в этом выбранном месте;
- средства управления могут также сравнивать результаты по меньшей мере некоторых первых измерений с результатами по меньшей мере некоторых вторых измерений для выработки команды на продолжение испытания, когда результаты первых измерений или первые результаты совместимы с результатами вторых измерений или вторыми результатами.
Изобретение относится также к способу механического нагружения трубчатого образца, согласно которому вводят в образец, в зоне испытаний, по меньшей мере один пакер, имеющий продольный размер, превышающий протяженность зоны испытаний, и содержащий первое и второе и/или третье средства создания давления, производят локальное изменение диаметра по меньшей мере первой части пакера первым средством создания давления, для прижатия этого пакера к внутренней поверхности образца на уровне зоны испытаний, и прикладывания, с помощью второго средства создания давления, первого выбранного внутреннего давления к части внутренней поверхности, находящейся на уровне второй части пакера, и/или прикрепления к образцу по меньшей мере одного перекрывающего элемента, на некотором расстоянии от края пакера, для задания зоны воздействия, и прикладывают к образцу третьим средством создания давления второе выбранное внутреннее давление на уровне зоны воздействия.
Способ согласно изобретению может включать дополнительные характеристики, которые могут быть взяты по отдельности или в комбинации, и в частности:
- используют по меньшей мере один тензометр, помещенный в выбранное место наружной поверхности образца для получения результатов первых измерений напряжений, характеризующих напряженное состояние, испытываемое образцом на уровне выбранного места;
- используют по меньшей мере два тензометра, помещенные в двух разных выбранных местах наружной поверхности, для получения значений первых измерений напряжений, характеризующих напряженное состояние, испытываемое образцом на уровне этих двух выбранных мест;
- используют два опорных средства, на которые устанавливается образец, и ротационный двигатель в паре с устройством возбуждения, оборудованным устройством со смещенным центром масс, соединенным с одним концом образца и задающим противовес, и с помощью двигателя приводят эксцентриковую массу во вращение с регулируемой скоростью, чтобы подвергнуть образец выбранному вибрационному возбуждению, в функции противовеса, чтобы циклически деформировать его изгибом;
- размещают по меньшей мере одно из опорных средств по существу на уровне узла колебаний образца;
- предусматривают предварительный базовый этап, на котором сначала выбирают начальную скорость вращения двигателя в зависимости от амплитуды напряжения, которое хотят приложить к образцу;
- после предварительного базового этапа подбирают скорость вращения двигателя, чтобы амплитуда напряжения изгиба, испытываемого образцом и представленная первыми измерениями, оставалась по существу постоянной;
- используют по меньшей мере одну пару акселерометров, смещенных на 90° относительно друг друга, в выбранных местах наружной поверхности образца, чтобы получить значения вторых измерений, характеризующих смещение, испытываемое этим образцом. В этом случае скорость вращения двигателя подбирают в зависимости от значений последних вторых измерений, выданных парой акселерометров, чтобы амплитуда радиального смещения из-за изгиба, испытываемого образцом в выбранном месте, оставалась по существу постоянной;
- используют по меньшей мере две другие пары акселерометров. В этом случае акселерометры каждой другой пары также смещены на 90° относительно друг друга в других выбранных местах наружной поверхности образца и выдают значения других вторых измерений, характеризующих смещения, испытываемые образцом на уровне других выбранных мест. В этом случае можно осуществить комбинации результатов последних вторых измерений, чтобы установить скорость вращения двигателя в зависимости от этих комбинаций, чтобы амплитуда смещения из-за изгиба, испытываемого образцом в выбранных местах, оставалась по существу постоянной;
- сравнивают по меньшей мере результаты последних вторых измерений, выданных по меньшей мере одной парой акселерометров, с результатами вторых базовых измерений, характеризующими начальную амплитуду смещения, соответствующую искомой амплитуде смещения из-за изгиба, в выбранном месте и затем устанавливают скорость вращения двигателя в зависимости от результата сравнения;
- определяют относительное отклонение амплитуды смещения, представленной результатами последних вторых измерений, от искомой амплитуды смещения из-за изгиба и сравнивают полученное отклонение с границами допустимого интервала, называемого диапазоном регулирования для подстройки скорости вращения двигателя, когда это отклонение превышает указанный диапазон регулирования;
- детектируют каждое вращение, осуществляемое двигателем для подстройки скорости вращения двигателя каждый раз, когда число полученных сигналов станет равным выбранному числу;
- в ходе испытания на нагрузку отдают команду двигателю привести эксцентриковую массу во вращение при выбранной последовательности скоростей вращения, чтобы подвергнуть образец выбранной последовательности вибрационных возбуждений;
- проводят поиск утечки снаружи образца, в зоне испытаний;
- крепят к образцу два перекрывающих устройства, на расстоянии от двух концов пакера, чтобы задать две зоны воздействия, в которых образец подвергают действию второго выбранного внутреннего давления;
- используют по меньшей мере один датчик температуры в выбранном месте образца, чтобы получить результаты третьих измерений, характеризующих температуру образца в этом выбранном месте;
- используют по меньшей мере один датчик давления в выбранном месте образца, чтобы получить результаты четвертых измерений, характеризующих внутреннее давление образца в этом выбранном месте;
- производят сравнение первых результатов напряжения, полученных из по меньшей мере некоторых первых измерений, со вторыми результатами радиального смещения, полученными из по меньшей мере некоторых вторых измерений, чтобы выдать разрешение на продолжение испытаний, когда первые результаты совместимы со вторыми результатами.
Другие характеристики и преимущества изобретения будут более понятны из описания изобретения, приводимого ниже со ссылками на чертежи, на которых:
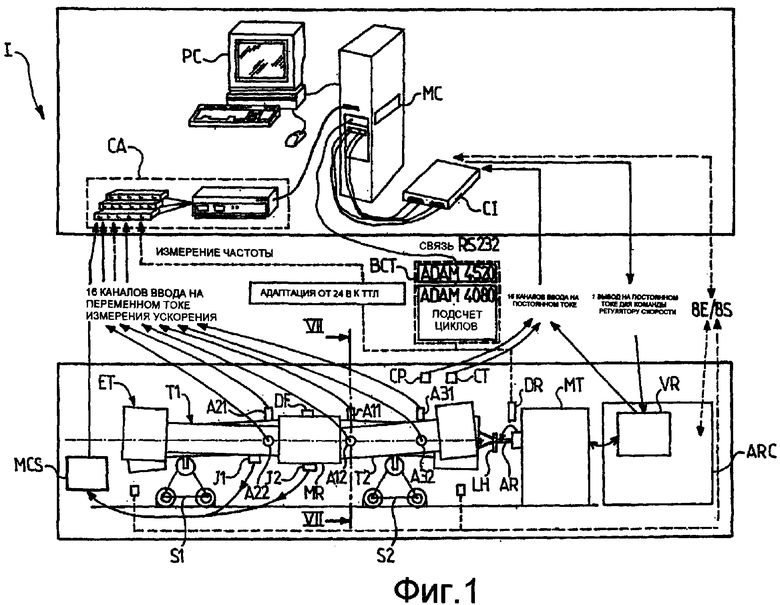
- фиг.1 схематически иллюстрирует пример реализации динамического типа установки для механического нагружения согласно изобретению,
- фиг.2 схематически иллюстрирует пример реализации пакера для установки нагружения согласно изобретению,
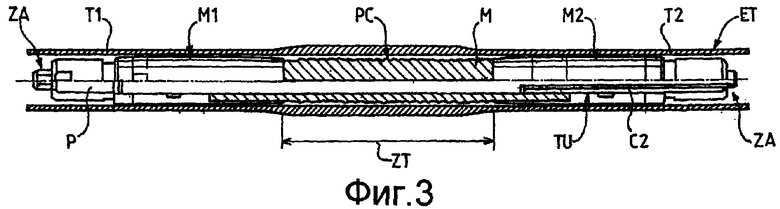
- фиг.3 схематически иллюстрирует вариант пакера для установки нагружения согласно изобретению,
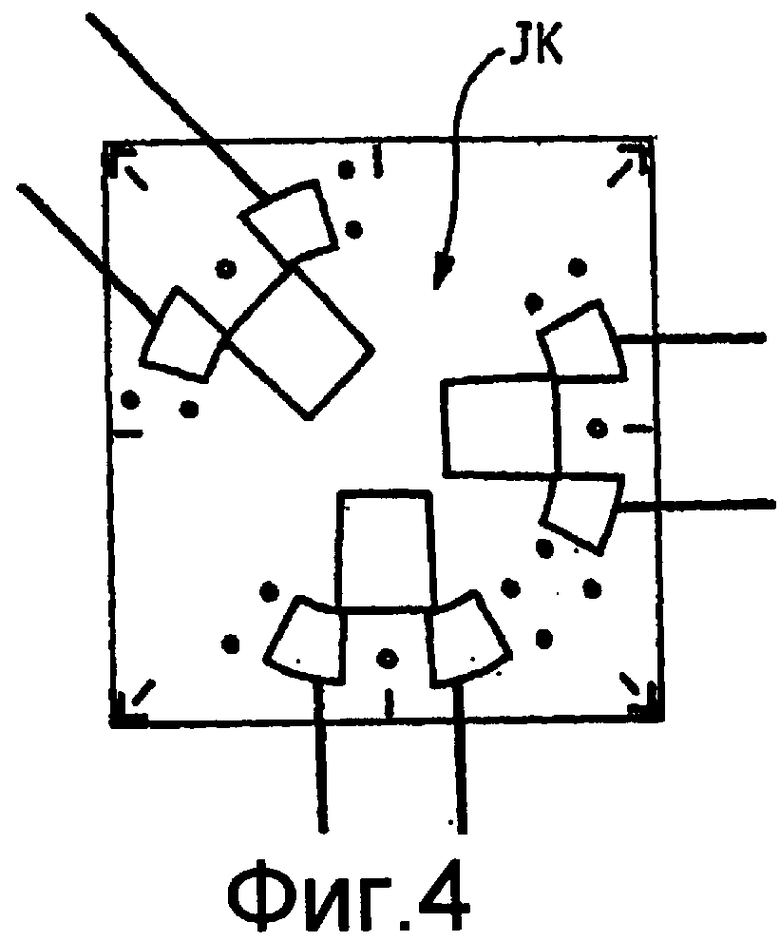
- фиг.4 иллюстрирует пример тензометра для обнаружения многоосевого напряжения,
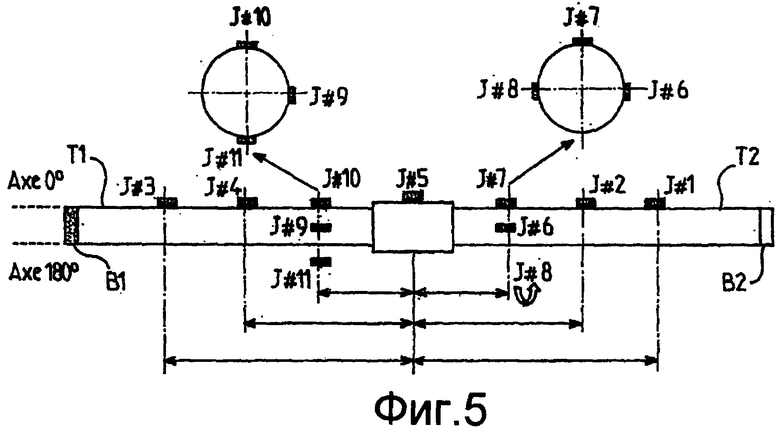
- фиг.5 схематически иллюстрирует пример размещения тензометров на образце,
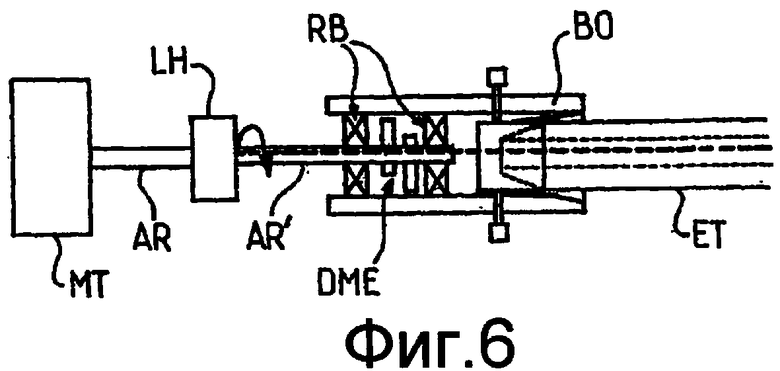
- фиг.6 схематически иллюстрирует, в поперечном разрезе, пример устройства возбуждения между валом двигателя и трубчатым образцом,
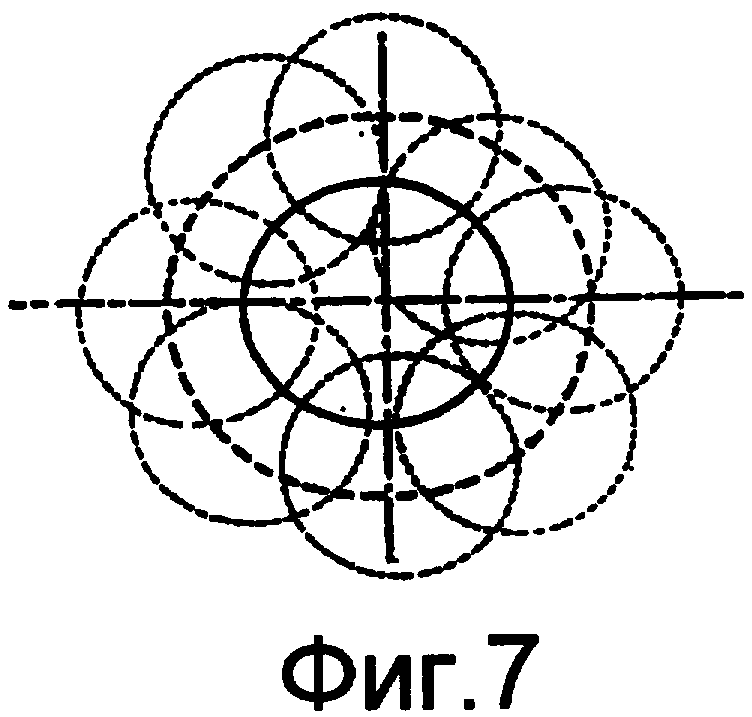
- фиг.7 схематически иллюстрирует смещение образца в случае механической нагрузки динамического типа, и
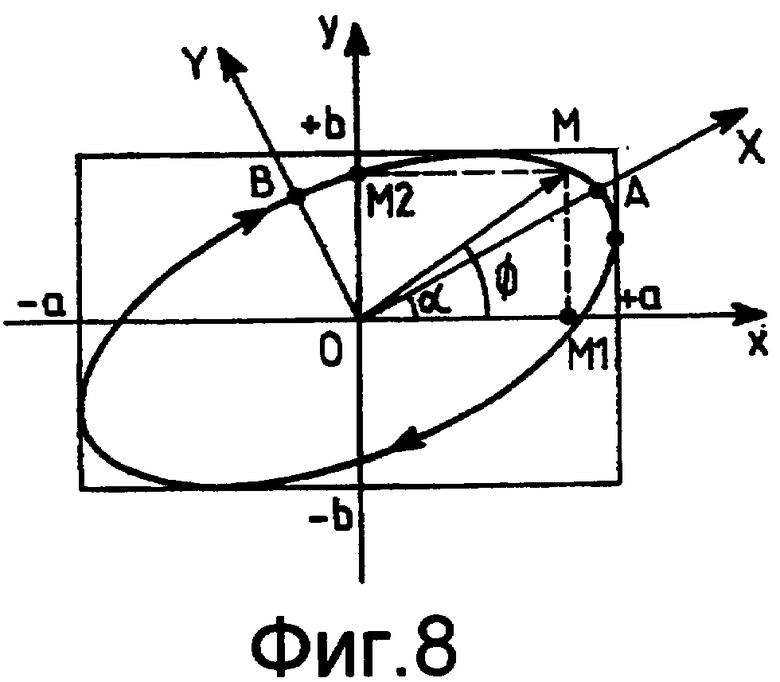
- фиг.8 является диаграммой, показывающей часть расчета динамического смещения с помощью эллипса.
Обратимся сначала к фиг.1 и 2, чтобы описать пример реализации установки I, предназначенной для механического нагружения трубчатого образца ET.
Как указано в вводной части, здесь под "трубчатым образцом" понимается любая труба или набор труб, соединенных между собой, например, соединительной муфтой. Следовательно, изобретение относится к механическому нагружению трубчатых образцов, находящихся в следующих формах:
- одиночная труба (или трубчатый элемент),
- две трубы (или трубчатые элементы), соединенные любыми средствами, например сваркой,
- первая труба (или трубчатый элемент), снабженная наружной резьбой, и вторая труба (или трубчатый элемент), снабженная внутренней резьбой, предназначенной для совместного действия вместе с наружной резьбой, чтобы образовать резьбовое соединение, и
- первая труба (или трубчатый элемент), снабженная наружной резьбой, вторая труба (или трубчатый элемент), также снабженная наружной резьбой, и соединительная муфта (или трубчатый элемент), снабженная внутренней резьбой с двух сторон, предназначенной для совместного действия с наружной резьбой для образования резьбового соединения.
В примере, показанном на фиг.1, установка I приспособлена, в частности, для механических нагрузок динамического типа. Однако изобретение не ограничено этим случаем. В действительности оно относится в равной степени к механическим нагрузкам как динамического, так и статического типа.
Здесь под "механической нагрузкой статического типа" понимается по существу постоянная нагрузка в некотором интервале времени, приводящая, в частности, к приложению давления и/или растяжения трубчатого образца, тогда как под "механической нагрузкой динамического типа" понимаются любые другие типы нагружения, меняющиеся во времени, как, например, нагрузки, получающиеся при приложении к трубчатому образцу не только давления и/или растяжения, но также выбранного вибрационного возбуждения, предназначенного для деформирования путем циклического изгиба.
Кроме того, под "амплитудой циклического нагружения" здесь понимается половина полного размаха колебаний.
Как показано на фиг.1, установка I согласно изобретению содержит в первую очередь первую часть (или стенд), предназначенную для механического нагружения образца ET. Эта первая часть содержит по меньшей мере один пакер P (показанный на фиг.2), называемый также забойником или наконечником, находящийся внутри образца ET на уровне зоны испытаний ZT.
В неограничивающем примере, показанном на фиг.1, трубчатый образец ET (называемый ниже образец) состоит из первой T1 и второй T2 трубы, каждая из которых снабжена наружной резьбой (не показано), и соединительной муфты MR, снабженной с двух сторон внутренней резьбой, действующей в соответствии с наружной резьбой, чтобы образовать подлежащее испытанию резьбовое соединение. В этой связи зона испытаний ZT находится на уровне соединительной муфты MR. Объектом испытания может быть любая другая зона образца ET.
Пакер P согласно изобретению должен иметь продольный размер (вдоль продольной оси трубы), превышающий протяженность зоны испытаний ZT, и содержать первое и второе и/или третье средство создания давления.
Первое средство создания давления предназначено для локального изменения диаметра по меньшей мере первой части PP пакера P, чтобы приложить его к внутренней поверхности образца ET на уровне зоны испытаний ZT.
Как показано, например, на фиг.2, локальное изменение диаметра пакера P может быть выполнено посредством кольцевой деформируемой мембраны M, установленной герметично на наружной поверхности трубы TU пакера P, и выбранной среды, подаваемой под выбранным давлением, между наружной поверхностью трубы и мембраной M, с помощью первой схемы подачи C1, составляющей часть первого средства создания давления.
Мембрана M здесь находится в центральной области пакера P.
В варианте, показанном на фиг.3, пакер P может содержать деформируемую мембрану M, содержащую центральную часть PC, снабженную выступами или имеющую ворсинки, позволяющие равномерно распределить среду и приложить внутреннее давление, и продолжающуюся с каждой стороны двумя участками M1 и M2, предпочтительно гладкими.
Среда под давлением, которая вводится первой схемой подачи C1, позволяет прижать по меньшей мере часть мембраны M (по меньшей мере M1 и M2) к внутренней стенке образца ET и, таким образом, зафиксировать пакер P внутри указанного образца ET, на уровне зоны испытаний ZT, изолируя по меньшей мере часть этой зоны испытаний ZT (в частности, на уровне центральной части мембраны).
Эта среда предпочтительно является жидкостью под давлением, например водой. Ее максимальное давление зависит от диаметра образца ET. Например, для диаметров выше 7 дюймов может быть использовано максимальное давление 600 бар, однако эта величина зависит также от типа используемого насоса.
Второе средство создания давления предназначено для оказания первого выбранного внутреннего давления PI1, на часть внутренней поверхности образца ET, расположенную напротив второй части пакера P. В примере, показанном на фиг.2, вторая часть пакера P находится на уровне мембраны M. Она образует участок первой части PP, по которому проходит мембрана M. Вместе с тем, в примере, показанном на фиг.3, второй частью пакера P является центральная часть PC, находящаяся между двумя крайними частями M1 и M2 мембраны M.
Как показано, например, на фиг.2, второе средство создания давления включает вторую схему подачи среды C2, снабженную выходом, который открывается рядом с внутренней поверхностью образца ET. Вторая схема подачи C2 подает выбранную среду под давлением в зону образца ET, которая находится на уровне второй части пакера P, что позволяет, таким образом, установить там первое внутреннее давление PI1 и, тем самым, воздействовать на указанную зону образца ET (более точно: его резьбовое соединение), по существу, радиальным давлением, близким к давлению, которое встречается в сложных условиях эксплуатации.
Среда, циркулирующая во второй схеме подачи C2, предпочтительно является газом под давлением, например гелием. Его максимальное давление зависит от диаметра образца ET. Например, для диаметров более 7 дюймов может предполагаться максимальное давление 600 бар, эта величина зависит также от типа используемого насоса.
Третье средство создания давления действует вместе с по меньшей мере одним перекрывающим элементом B1, который установлен на выбранном расстоянии от края пакера P, чтобы задать в образце ET зону воздействия ZA, в которой образец ET испытывает действие второго выбранного внутреннего давления PI2. Таким образом, можно вызвать растяжение в зоне воздействия ZA образца ET.
Например, перекрывающий элемент B1 жестко соединен с одним из двух краев образца ET. Когда этот конец снабжен резьбой, соединение может производиться болтами.
Когда хотят вызвать осевую растягивающую нагрузку на всей длине образца ET, предусматривают два перекрывающих устройства B1 и B2. Например, каждый перекрывающий элемент B1, B2 жестко закреплен с одним из двух концов образца ET. Зона воздействия ZA проходит в таком случае между двумя перекрывающими устройствами B1 и B2. Когда два края образца ET снабжены резьбой, закрепление перекрывающих устройств B1 и B2 может производиться болтами. Как вариант, оно может производиться любым другим средством и, например, сплошным сварным швом между концами образца и перекрывающим элементом.
Величина T осевой растягивающей нагрузки задается, например, формулой:
где IDt - внутренний диаметр образца ET и, следовательно, труб T1, T2; IDP - внутренний диаметр трубы TU пакера P, и PI2 - второе внутреннее давление.
В качестве варианта, можно предусмотреть образование в образце ET двух независимых зон воздействия, с одной и другой стороны пакера P, чтобы приложить осевое растяжение к каждой из двух частей образца, которым они соответствуют.
Как показано, например, на фиг.2, третье средство создания давления содержит третью схему подачи среды C3, предназначенную для подачи среды под давлением в каждую зону воздействия ZA.
Для питания каждой зоны воздействия ZA, можно, например, пользоваться трубами TU пакера P. Более точно, когда труба TU является полой, она может служить для проведения среды, подаваемой третьей схемой C3, и составлять часть этой последней. Как показано, например, на фиг.2, третья схема C3 содержит выход, соединенный с поперечным отверстием, образованным в стенке трубы TU, позволяя, таким образом, подавать в нее среду под давлением.
Среда, циркулирующая в третьей схеме подачи C3, предпочтительно является жидкостью под давлением, например водой. Например, независимо от диаметра образца ET, может предполагаться максимальное давление 600 бар.
Для оптимизации изолирования зоны испытаний ZT и зоны воздействия ZA, давление среды, циркулирующей в первом средстве создания давления, предназначенное для раздувания мембраны M пакера P, выбирается выше первого и второго внутренних давлений PI1, PI2.
Когда в первой C1 и третьей C3 схемах подачи среды циркулирует одна и та же среда, эти схемы могут быть соединены, например, с устройством переключения DA, соединенным, кроме того, с насосом высокого давления PE. Благодаря такому устройству переключения DA, можно, например, начать устанавливать выбранное давление в каждой зоне, находящейся между трубой TU и мембраной M (или ее центральной частью PC), чтобы сделать пакер P неподвижным внутри образца ET; для растягивания образца ET закрывают первую схему C1 и открывают третью схему C3, чтобы установить второе внутреннее давление PI2 в каждой зоне воздействия ZA.
Каждая схема подачи C1-C3 может располагать своим собственным насосом высокого давления.
В случае полой (или пустотелой) трубы TU предпочтительно, чтобы по меньшей мере часть первой C1 и второй C2 схем находилась внутри трубы TU. В этом случае каждый выход первой схемы C1 соединен с по меньшей мере одним поперечным отверстием, образованным в стенке трубы TU на уровне соответствующей мембраны M. В первом примере реализации пакера P (показанном на фиг.2) вторая схема C2 пересекает стенку трубы TU на уровне отверстия и герметично соединяется с другим поперечным отверстием, образованным в мембране M. Во втором примере реализации пакера P (показанном на фиг.3) вторая схема C2 герметично соединяется с поперечным отверстием, образованным в стенке трубы TU на уровне центральной части PC.
Чтобы зафиксировать напряжения, приложенные к образцу ET, а также определить деформации и/или смещения, которые являются целью прикладываемых напряжений, на наружной поверхности образца ET помещают по меньшей мере один тензометр Jk (индекс k означает здесь число используемых датчиков) и/или по меньшей мере одну пару акселерометров Ai1 и Ai2 (индекс i означает здесь число используемых пар).
Каждый тензометр Jk помещается (например, приклеиванием) в выбранное место наружной поверхности образца ET, чтобы выдавать первые измеренные значения напряжений, которые характеризуют напряженное состояние, испытываемое локально этим образцом (на уровне выбранного места).
Предпочтительно использовать по меньшей мере два тензометра. Их число не ограничивается. Чем оно больше, тем точнее карта напряжений, испытываемых образцом ET, и, таким образом, карта деформаций, локальным объектом которых они являются.
Тензометры Jk могут быть любого типа. Речь может идти, в частности, о датчиках одноосных и/или многоосных напряжений, например, устроенных в виде направленных в три стороны розеток, как показано на фиг.4.
Благодаря этим тензометрам Jk можно узнать, в частности, начальное (предварительный базовый этап) напряженное состояние (одно- или многоосевое), испытываемое образцом ET в одном или нескольких местах (или участках) и, следовательно, эффект от приложенной к ним нагрузки.
Схема, иллюстрирующая пример размещения тензометров Jk на образце ET, содержащем две трубы T1 и T2 с наружным диаметром около 240 мм и длиной 2300 мм, собранные на резьбе с помощью резьбовой муфты MR длиной по существу равной 400 мм, показана на фиг.5. В этом примере используется 11 тензометров J1-J11:
- один тензометр J5 расположен по существу в медианной плоскости образца ET, то есть в медианной плоскости муфты MR, по оси 0°,
- один тензометр J1 или J3 расположен вблизи каждого конца образца ET (здесь: на трубах T1, T2 на расстоянии от медианной плоскости, равном примерно 1300 мм), по оси 0°,
- тензометры J2 и J4 расположены соответственно в первом и втором промежуточных участках образца ET (здесь: на трубах T1, T2 на расстоянии от медианной плоскости, равном примерно 900 мм), по оси 0°,
- тройки тензометров (J6-J8) и (J9-J11) помещают соответственно в третий и четвертый промежуточные участки образца ET (здесь: на трубы T1, T2 на расстоянии от муфты, по существу равном одновременно наружному диаметру труб T1, T2, либо на расстоянии от медианной плоскости, по существу равном примерно 530 мм). Тензометры каждой тройки расположены здесь под 90° друг к другу, например, в двух разных конфигурациях. Можно также использовать пары или четверки тензометров.
Можно также использовать меньшее число тензометров Jk. Как показано, например, на фиг.1, можно использовать всего два тензометра, причем первый расположен в центре образца ET, а второй помещен на определенное расстояние от первого. В целом, положения тензометров Jk зависят от места, где в образец ET установлен пакер P.
Два акселерометра Ai1 и Ai2 каждой пары помещают (например, приклеиванием) под углом 90° друг к другу в выбранные места наружной поверхности образца ET, чтобы выдавать результаты вторых измерений (или сигналы), предоставляющие, после двойного интегрирования, динамическое смещение, испытываемое локально этим образцом.
Например, используют первую пару A11 и A12, которую сочетают с двумя другими парами акселерометров A21 и A22 с одной стороны и A31 и A32 с другой стороны.
Два акселерометра Ai'1 и Ai'2 каждой другой пары (в рассматриваемом примере i'=2 или 3) помещают (например, приклеиванием) под углом 90° друг к другу в выбранные места наружной поверхности образца ET, отличные от мест, куда вставлены два акселерометра A11 и A12 первой пары. Они предназначены для выдачи результатов других вторых измерений (или сигналов), представляющих, после двойного интегрирования, локальное динамическое смещение, испытываемое образцом ET на уровне места, где они установлены.
В рассматриваемом примере пары акселерометров A11-A12 и A21-A22 расположены соответственно на трубах T2, T1 около соединительной муфты и с одной и другой стороны ее стороны, а пара A31-A32 расположена на трубе T2 около края образца ET.
Совокупность тензометров (J1-J11) и пар акселерометров (A11-A32) позволяет определить напряжения и радиальные динамические смещения в любой точке образца ET.
Установка I помимо тензометров Jk и пар акселерометров (Ai1-Ai2) может включать в себя и другие датчики.
Так, как показано на фиг.1, можно предусмотреть по меньшей мере один датчик давления CP, и/или по меньшей мере один датчик температуры CT, и/или по меньшей мере один детектор утечки DF.
Датчик температуры CT устанавливают в выбранное место образца ET, например, на уровне зоны испытаний ZT. Он предназначен для выдачи сигналов (или результатов третьих измерений), характеризующих температуру образца ET на уровне выбранного места, где он установлен. Такой датчик CT позволяет, в частности, проводить автокомпенсанцию результатов измерений, выданных тензометрами, чтобы сгладить локальные изменения температуры.
Датчик давления CP установлен в выбранное место образца ET, например, на уровне зоны испытаний ZT или, как показано на фиг.2, на уровне перекрывающего элемента B1. Он должен выдавать сигналы (или результаты четвертых измерений), характеризующие внутреннее давление (PI1 или PI2), испытываемое образцом ET на уровне выбранного места, где он установлен. Такой датчик CP может, в частности, позволить обнаружить неожиданное изменение внутреннего давления, вызванное трещиной.
Детектор утечки DF установлен в выбранное место образца ET, например, на уровне зоны испытаний ZT, более точно, на уровне второй части пакера P. Он предназначен для обнаружения любого присутствия среды (газа), подаваемого по второй схеме C2, снаружи образца ET. В случае обнаружения утечки, детектор утечки DF генерирует сигнал тревоги в направлении блока управления MC. Такой детектор DF дает, в частности, возможность обнаруживать трещины в образце ET.
Благодаря вышеназванным средствам нагружения (первое и второе и/или третье средство создания давления) можно нагружать образец ET в статическом режиме.
Так, можно подвергнуть образец ET чистому давлению, используя первое средство создания давления (первая схема C1) для прижатия мембраны M к внутренней поверхности указанного образца ET, и второе средство создания давления (вторая схема C2) для локального приложения первого внутреннего давления (радиального) PI1 к внутренней стенке образца ET.
Образец ET может в определенных условиях испытывать внутренние давления, которые могут доходить до 600 бар.
Можно также подвергнуть образец ET чистому растяжению, используя первое средство создания давления (первая схема C1) для прижатия мембраны M к внутренней поверхности указанного образца ET, и третье средство создания давления (третья схема C3) для приложения в каждой зоне воздействия ZA второго внутреннего давления (осевого) PI2 между перекрывающими элементами B1 и B2, через трубу TU пакера P.
Наконец, можно подвергнуть образец ET давлению, комбинированному с растяжением, используя первое средство создания давления (первая схема C1), чтобы прижать мембрану M к внутренней поверхности указанного образца ET, второе средство создания давления (вторая схема C2), пробы локально приложить первое внутреннее давление (радиальное) PII к внутренней стенке образца ET, и третье средство создания давления (третья схема C3) для приложения в каждой зоне воздействия ZA второго внутреннего давления (осевого) PI2 между перекрывающими элементами B1 и B2, через трубу TU пакера P.
Важно отметить, что испытание на механическую нагрузку может включать единственную стадию, на которой интенсивность каждого нагружения (давление и/или растяжение) по существу постоянна, или же последовательность по меньшей мере двух стадий, на которых по меньшей мере одна из интенсивностей нагрузки меняется от стадии к стадии.
Испытание может быть осуществлено, в частности, в несколько стадий, причем каждая проводится с конкретной комбинацией нагрузок, чтобы, например, использовать часть контура эллипса Мизеса или любую другую линию, определяемую исходя из эллипса, например участок линии гомотетии эллипса.
Испытание задается файлом, параметры которого определяет оператор. При необходимости оно может быть возобновлено, если прерывалось. Такой файл содержит всю информацию об образце ET (артикул, диаметр) и давлении в схемах C1-C3 и параметры измерения и контроля.
Как показано на фиг.1, когда желательно нагрузить образец ET динамически, часть установки I, предназначенная для нагружения, должна содержать средства в дополнение к средствам создания давления (M, C1-C3), соединенные с образцом ET, чтобы подвергнуть его выбранному вибрационному возбуждению, предназначенному для его деформации циклическим изгибом.
Эти дополнительные средства предпочтительно имеют вид двух средств S1, S2 опоры образца ET и ротационного двигателя MT, связанного со средствами возбуждения, прикрепленными к одному концу образца ET.
Как показано, например, на фиг.1, каждое опорное средство S1, S2 выполнено в виде подвижной опоры, положение которой можно менять в зависимости от потребностей, как в отношении назрузки, так и размера образца ET. Например, каждая подвижная опора S1, S2 образована гибким домкратом типа выпускаемых под маркой "pneuride" компанией Firestones-Bridgestone.
Как показано на фиг.6, средства возбуждения состоят, например, из корпуса BO, жестко скрепленного с одним концом образца ET и приводящего во вращение устройство со смещенным центром масс DME, установленное с возможностью вращения на валу опоры AR'. Это устройство со смещенным центром масс DME задает противовес для рассматриваемого конца образца ET.
Соединение между двигателем MT и валом опоры средства возбуждения может находиться в прямой связи или гомокинетической связи LH, например, типа кардана или пластического шарнира, который обеспечивает соединение между выходом AR двигателя MT и средствами возбуждения.
Преимущество соединения путем гомокинетической связи, как показано на фиг.1, состоит в том, что позволяет закрепить двигатель MT на основе установки и не подвергать его сильным вибрациям.
Прямое соединение требует установки двигателя на конце образца ET, но дает другие преимущества, которые будут описаны ниже.
Например, можно использовать двигатель MT с электрической мощностью 15 кВт, который может вращать вал AR с максимальной скоростью примерно 3000 оборотов/мин.
Как показано, например, на фиг.6, устройство со смещенным центром масс DME установлено с возможностью вращения в корпусе BO благодаря двум шарикоподшипникам RB.
Когда двигатель MT приводит во вращение эксцентриковую массу, она заставляет корпус BO колебаться в радиальном направлении. Поскольку образец ET помещен на две опоры S1 и S2 и один из его концов скреплен с корпусом BO, образец ET также вынужден колебаться. Таким образом, он подвергается выбранному вибрационному возбуждению, которое является функцией (в частности) противовеса, задаваемого устройством со смещенным центром масс DME, и которое вызывает его деформацию изгиба. Более точно, волна изгиба, основная частота которой равна частоте вращения противовеса, распространяется вращательно по образцу ET относительно его продольной оси в состоянии покоя.
Это тип возбуждения позволяет воспроизвести нагрузку с поворотным напряжением и/или поворотной деформацией, например, типа образующихся при смещениях нефтедобывающей платформы в открытом море, и/или при морских течениях, и/или при приведении во вращение трубчатой колонны, которая опускается в скважину, отклоняющуюся от вертикали.
Желательно для стабильности образца в ходе испытания располагать две опоры S1 и S2 в узлах колебаний.
Это, как правило, невозможно в случае установки с гомокинетической связью LH, так как она обязательно расположена в узле колебаний. В таком случае только опора S1 может находиться в узле колебаний. Поэтому другая основа S2 может испытывать существенные вибрации.
В случае прямой связи между двигателем MT и средством возбуждения можно поместить две опоры S1, S2 в узлы колебаний, что является выгодным и предпочтительным.
Траектория, по которой проходит образец ET, на уровне участка, обозначенного стрелками VII-VII на фиг.1, показана схематически на фиг.7. Центральная окружность, выполненная сплошной линией показывает начальное положение образца ET в состоянии покоя; окружности в виде точечных линий, показывают последовательные положения образца ET, когда он подвергается вибрационному возбуждению, а окружность в виде пунктирных линий показывает траекторию продольной оси образца ET, когда он подвергается вибрационному возбуждению.
Таким образом, можно приложить по существу однородную амплитуду напряжения и/или радиального смещения изгиба по всему периметру образца ET.
Например, используют эксцентриковую массу весом меньше или равным 30 кг и моду вибрационного возбуждения, называемую модой разрешения 1, резонансная частота которой составляет от примерно 20 Гц до примерно 30 Гц. Таким образом, можно вызвать циклический изгиб, амплитуда радиального смещения которого может превысить сотню миллиметров, например, составлять примерно 120 мм на уровне центра образца ET (здесь: занимаемого резьбовым соединением с соединительной муфтой MR), когда его диаметр составляет 16 дюймов, а длина несколько метров.
Важно отметить, что чем больше частота вращения двигателя приближается к резонансной частоте, тем больше амплитуда волны изгиба, которой подвергается образец ET. Скорость вращения двигателя MT может быть выбрана с помощью регулятора скоростей VR, получающего инструкции (команды) от блока управления MC, к которому вернемся позднее.
Выбирают работу в диапазоне скоростей вращения ниже резонансной частоты образца ET в моде 1. Эта резонансная частота зависит от характеристик образца ET (таких, как длина и материал) и других параметров (таких, как тип пакера P и среда, содержащаяся в образце ET). Теоретически ее можно определить из теоретических расчетов, но, учитывая сложность параметров, лучше определять ее опытным путем и без противовеса (DME). В общем случае, чем короче образец, тем больше его резонансная частота.
Сила возбуждения F, которую нужно приложить к концу образца ET, чтобы получить заданную амплитуду смещения образца, зависит от длины образца. Чем меньше длина образца ET, тем большую силу возбуждения надо приложить для получения данной амплитуды смещения (или напряжения) в образце.
Сила возбуждения F в зависимости от используемого противовеса (массы M), радиуса центра инерции противовеса и скорости вращения N двигателя задается формулой:
где ω=2πN, и N дано в об/с.
Обычно выбирают скорость вращения N на несколько герц ниже резонансной частоты моды 1.
Чтобы иметь возможность регулировать скорость вращения двигателя MT, установка I содержит блок управления MC, который, например, установлен в компьютере PC. Более точно, блок управления MC регулирует скорость, с которой двигатель MT должен приводить во вращение эксцентриковую массу DME, чтобы подвергнуть образец ET вибрационному возбуждению, позволяющему вызвать деформацию циклического изгиба с по существу постоянной амплитудой напряжения или радиального смещения, определяемой во время предварительной базовой стадии.
Установка начальной деформации изгиба проводится предпочтительно на предварительном базовом этапе в заданном временном интервале. Действительно, теоретически возможно определить искомую скорость вращения двигателя MT, которая позволит вызвать искомую деформацию изгиба образца ET с учетом используемого противовеса. Однако на практике должна обычно проводиться подгонка скорости, чтобы реальная деформация соответствовала искомой деформации.
Предварительный базовый этап состоит поэтому в том, чтобы заставить двигатель MT, например, с помощью блока управления MC, развивать относительно низкую начальную скорость, затем, например, снять показания по амплитуде напряжения, испытываемого образцом ET, с помощью по меньшей мере одного из тензометров Jk. Сравнивая измеренную амплитуду напряжения с искомой, можно определить, является ли скорость вращения требуемой (в случае равенства), или же начальная скорость должна быть скорректирована (в случае разницы). Сравнение можно проводить вручную оператором или же автоматически блоком управления MC.
Если реальная деформация не равна искомой деформации, увеличивают скорость вращения на заданное приращение, чтобы новая скорость вращения вызывала искомую амплитуду напряжения. Данное это приращение скорости вращения может производиться вручную инженером или же автоматически блоком управления MC.
Различные (первые) измерения напряжений, проведенные для определения скорости вращения, которую надо использовать, называются первыми базовыми измерениями.
Вместо (первых) измерений напряжений можно использовать (вторые) измерения ускорения, выдаваемые первой парой акселерометров Ai1 и Ai2, а также, возможно, другими парами акселерометров Ai'1 и Ai'2, которые служат в таком случае базовыми измерениями для радиального смещения, испытываемого образцом ET, и задать вторые базовые измерения, когда найдена скорость вращения, вызывающая данную амплитуду смещения образца.
Важно отметить, что акселерометры, используемые для вторых измерений, не должны располагаться ни в узлах колебаний, ни вблизи них.
После того, как скорость вращения определена из первых или вторых базовых измерений, можно начинать испытание на нагрузку. Могут планироваться любые типы испытания.
Можно, например, деформировать образец только циклическим изгибом с помощью средств возбуждения, приводимых в движение двигателем MT. Изобретение может применяться к образцам, испытываемым только на циклический изгиб (чисто динамические условия без дополнительных циклических нагрузок). В этом случае используются только дополнительные средства (пакер, средства создания давления и перекрывающие элементы в этом случае не нужны).
Можно также деформировать образец ET циклическим изгибом с помощью средств возбуждения, приводимых в движение двигателем MT, прикладывая к нему чистое давление, используя первое средство создания давления (первая схема C1), чтобы прижать мембрану M к внутренней поверхности указанного образца ET, и второе средство создания давления (вторая схема C2), чтобы приложить локально первое внутреннее давление (радиальное) PI1 к внутренней стенке образца ET.
Можно также деформировать образец ET изгибом с помощью средств возбуждения, приводимых в движение двигателем MT, подвергая его чистому растяжению, используя первое средство создания давления (первая схема C1), чтобы прижать мембрану M к внутренней поверхности указанного образца ET, и третье средство создания давления (третья схема C3), чтобы приложить в каждой зоне воздействия ZA второе внутреннее давление (осевое) PI2 между перекрывающими элементами B1 и B2, через трубу TU пакера P.
Наконец, можно также деформировать образец ET изгибом с помощью средств возбуждения, приводимых в движение двигателем MT, подвергая его действию давления в сочетании с растяжением, используя первое средство создания давления (первая схема C1), чтобы прижать мембрану M к внутренней поверхности указанного образца ET, второе средство создания давления (вторая схема C2), чтобы приложить локально первое внутреннее давление (радиальное) PI1 к внутренней стенке образца ET, и третье средство создания давления (третья схема C3), чтобы приложить в каждой зоне воздействия ZA второе внутреннее давление (осевое) PI2 между перекрывающими элементами B1 и B2, через трубу TU пакера P.
Важно отметить, что применение пакера, средств создания давления и перекрывающих элементов, установленных на образце, согласно изобретению позволяет эффективно использовать, в дополнение к статическим нагрузкам, циклическую динамическую нагрузку, чего нельзя было сделать в испытательных установках предшествующего уровня техники с домкратами, и выбрать заданную комбинацию статических нагрузок, чего не позволяли установки предшествующего уровня техники, которые предлагают только простое повышение внутреннего давления с помощью жидкой или газовой среды.
Кроме того, важно отметить, что испытание на динамическую нагрузку может включать единственную стадию, на которой интенсивность каждой нагрузки (деформация изгиба и давление и/или растяжение) по существу постоянна, или же последовательность по меньшей мере двух стадий, на которых по меньшей мере одна из интенсивностей нагрузки меняется от стадии к стадии. Например, испытание на динамическую нагрузку может включать последовательность двух стадий, на которых давление и/или растяжение сохраняются по существу постоянными, а скорость вращения эксцентриковой массы (DME) меняется от стадии к стадии (например, возрастает).
Как указывалось ранее, испытание задается файлом, параметры которого определяет специалист. Такой файл содержит, в частности, всю информацию относительно образца (артикул, диаметр), об условиях нагрузки (масса противовеса, скорость (или частота) вращения на каждой стадии в последовательности, число циклов (или оборотов) для каждой стадии) и о давлениях схем C1-C3, а также о параметрах измерения и контроля.
Явление усталости характеризуется появлением трещины, которая распространяется, в частности, через стенку образца, по окончании определенного числа циклов (или оборотов двигателя).
Когда в образце распространяется усталостная трещина, имеется потеря "монолитности" образца, и амплитуда напряжения и/или радиального смещения, которое испытывает образец, меняется, хотя скорость вращения (или частота) остается постоянной.
Другие причины могут вызвать изменение амплитуды напряжения или смещения до появления усталостной трещины.
Следовательно, если хотят, чтобы деформация образца ET из-за напряжения или смещения оставалась по существу постоянной от начала до конца испытания на нагрузку, нужно, чтобы установка I содержала систему коррекции ошибок, основанную на регулировании скорости, с которой двигатель MT вращает противовес (DME), в зависимости от сравнения проведенных измерений и базовых измерений.
Регулирование скорости основано по меньшей мере на:
- первых базовых измерениях (напряжение), характеризующих амплитуду напряжения, которому изначально подвергается образец ET,
- последующих первых измерениях, характеризующих амплитуду напряжения, испытываемого в любой момент образцом ET во время испытания.
Как вариант, регулирование скорости вращения основано по меньшей мере на:
- вторых базовых измерениях, характеризующих амплитуду или амплитуды смещения на уровне каждого участка образца ET, снабженного парой акселерометров, и соответствующую амплитуду начальной деформации,
- последующих вторых измерениях, характеризующих смещение, испытываемое образцом ET в ходе испытания, на уровне его участка, снабженного первой парой акселерометров Ai1 и Ai2,
- а также, возможно, на других вторых измерениях, характеризующих другие смещения, испытываемые образцом ET на уровне этих других участков, снабженных другой парой акселерометров Ai'1 и Ai'2. Блок управления MC может, например, определить относительное отклонение амплитуды смещения, даваемое последними вторыми измерениями, от искомой амплитуды смещения из-за изгиба, затем сравнить это отклонение с границами допустимого интервала, называемого выбранным диапазоном регулирования, чтобы корректировать скорость вращения двигателя MT каждый раз, когда отклонение превышает диапазон регулирования. Превышение потолка рассматривается здесь как ошибка, которую нужно исправить.
Относительное отклонение сравнивается, например, с границами фиксированного диапазона регулирования, например, составляющего в процентах ±2,5%. Если относительное отклонение между правильным значением и последним значением находится за пределами интервала, содержащегося между -2,5% и +2,5%, то ошибку нужно ликвидировать.
Может задаваться второй допустимый интервал, называемый диапазоном наблюдения, например, равный двойному диапазону регулирования и имеющий один центр с ним, чтобы вызвать остановку испытания, если относительное отклонение находится вне этого второго диапазона.
Все вышесказанное о смещениях относится также к напряжениям.
Коррекция скорости вращения, осуществляемая блоком управления MC, основана на измерениях, проведенных с выбранной частотой. Например, эта частота соответствует частоте вращения вала AR, приводимого в движение двигателем MT. Каждый оборот вала AR детектируется, например, датчиком вращения DR и выражается созданием сигнала в направлении на блок управления MC. Так, каждый раз, когда блок управления MC получит число сигналов, равное выбранному числу, он запрашивает акселерометры и/или датчики, относящиеся к системе автоматического регулирования, и использует их (первые и/или вторые) измерения, чтобы привести в действие указанную систему автоматического регулирования. Датчик вращения DR является, например, датчиком оптического типа (он содержит, например, считывающий лазер, возможно, типа, выпускаемого компанией Keyence).
Важно отметить, что система автоматического регулирования может исходить из измерений, выдаваемых по меньшей мере некоторыми датчиками, или же из измерений, выдаваемых по меньшей мере некоторыми акселерометрами (смещения), или же исходя одновременно из измерений, выдаваемых по меньшей мере некоторыми акселерометрами (смещения), и измерений, выдаваемых по меньшей мере некоторыми датчиками (напряжения).
Один пример расчета обратной связи, основанной на (вторых) измерениях акселерометров, описывается ниже (расчет может быть проведен таким же путем на (первых) измерениях напряжений).
Этот расчетный пример основан на гипотезе, согласно которой эффективная кривая деформации образца ET имеет первый порядок, и, следовательно, амплитуда смещения на частоте возбуждения на каждом участке, снабженном парой акселерометров, прямо пропорциональна напряжению, испытываемому образцом ET. В этих условиях, чтобы удержать постоянным начальное напряжение, соответствующее начальной деформации, достаточно сохранить постоянной каждую амплитуду смещения.
Каждый раз, когда блок управления MC получает сигнал (или "сигнал вращения") с датчика вращения DR, он снимает данные по (вторым) измерениям, проведенным каждой парой акселерометров, и выводит первое значение максимальной амплитуды и значение соответствующей фазы при частоте возбуждения.
Каждое значение максимальной амплитуды корректируется, например, исходя из спектрального анализа временных сигналов, выдаваемых акселерометрами, в зависимости от частотного разрешения и значений спектральных линий на частоте fn и на частотах fn-1 и fn+1 с одной и другой стороны от fn, по такому алгоритму, как представленный ниже.
Если an означает максимальную амплитуду на частоте fn, а an-1 и an+1 - амплитуды на частотах fn-1 и fn+1, и pf есть частотное разрешение, то скорректированная амплитуда (ускорения) a'n на частоте fn дается соотношением a'n = an/pf:
и
Затем эти исправленные амплитуды (ускорения) преобразуются в смещения (u) путем двойного интегрирования по частоте, где
Два сигнала, выданные парой акселерометров и характеризующие теоретическое смещение, имеют здесь синусоидальную форму.
Орбита этих двух сигналов на одном и том же участке образца ET описывает эллипс, большая ось которого образована максимальной амплитудой смещения на участке образца ET.
Как показано на фиг.8, этот эллипс вписан в четырехугольник, стороны a и b которого соответствуют измеренным и исправленным амплитудам (ускорения). Эти главные оси смещены на угол α относительно осей x, y, по которым осуществляют измерения пары акселерометров.
Параметрические уравнения этих двух сигналов могут быть выражены следующим образом (показано на фиг.8 точкой M, даваемой, например, сигналом о повороте):
OM1: x=a cosωt
OM2: y=b cos(ωt+Ф), с Ф ∈ [0, 2π],
где Ф есть динамический фазовый сдвиг между сигналами двух акселерометров.
Ищут решение уравнения эллипса в виде:
и, проводя реперное изменение вращением на угол α, приходят к следующей формуле:
с α ∈ [0, π/2].
Главные оси эллипса рассчитываются тогда следующим образом:


Максимум A и B соответствует в этом случае максимальной достигнутой амплитуде.
Можно проверить, что, полагая Ф=90° (что соответствует отсутствию динамического фазового сдвига и тем самым только статическому фазовому сдвигу между акселерометрами одной пары), действительно получим α=0°, A=a и B=b.
Блок управления MC осуществляет этот расчет для каждого участка образца ET, снабженного парой акселерометров и выбранного изначально специалистом.
Значения амплитуды смещения каждого участка могут быть при необходимости выведены на экран компьютера PC. Это отображение может быть сделано, например, в виде суперпозиции последних эллипсов, полученных посредством каждой пары акселерометров с каждого анализируемого участка. Приведение к одному масштабу разных наложенных эллипсов может проводиться по отношению к самому большому измеренному смещению (относительно самого большого диапазона входных значений).
Предпочтительно, блок управления MC определяет выбранное относительное отклонение между каждой амплитудой смещения, которую он определил, и амплитудой смещения, соответствующей (вторым) начальным базовым измерениям. Затем эти отклонения сравниваются с границами допустимого диапазона регулирования, который определяется инженером до начала испытания на нагрузку.
Когда на уровне каждого участка образца ET соблюдается допустимое относительное отклонение (или процент допуска), испытание на нагрузку продолжается с той же скоростью вращения, что и раньше, или же с новой скоростью (или командами), если указанное испытание включает новую стадию с другой амплитудой смещения.
Когда относительное отклонение (или процент допуска) не соблюдается на уровне по меньшей мере одного из участков образца ET, блок управления MC вызывает положительное или отрицательное, в зависимости от величины отклонения, приращение (определяемое инженером до начала испытания на нагрузку) величины скорости вращения, чтобы определить новое значение (или команды) скорости двигателя MT.
Когда используется приращение, можно, например, предусмотреть, чтобы блок управления MC продолжал эти расчеты, но не проводил новой коррекции (нового приращения) в течение времени ожидания, определяемого вначале инженером. Это правило предназначено для того, чтобы установка I могла стабилизировать свой отклик.
Важно отметить, что если в данный момент частота, которая отвечает новой скорости вращения (или команде), определяемой блоком управления MC, выходит за максимальную частоту, определенную вначале специалистом, которая немного ниже резонансной частоты образца ET, испытание на нагрузку прекращают.
Важно также отметить, что минимальное время отклика системы автоматического регулирования соответствует выбранному частотному разрешению.
Когда система автоматического регулирования регистрирует только (первые) измерения напряжения, команды могут быть скорректированы добавлением положительных или отрицательных приращений к скорости вращения. Например, можно сравнить относительные отклонения напряжения (тензометры) с границами допустимого диапазона напряжений. В этом случае можно решить повысить скорость вращения на один шаг, если относительное отклонение напряжения опускается ниже нижнего предела допустимого диапазона регулирования. Аналогично, можно решить уменьшить скорость вращения на один шаг, если относительное отклонение напряжения превысит верхний предел второго допустимого диапазона регулирования. Если относительное отклонение напряжения находится вне допустимого диапазона наблюдения, являющегося удвоенным допустимым диапазоном регулирования и имеющим с ним один центр, можно принять решение об остановке двигателя MT и, тем самым, испытания.
Когда система автоматического регулирования регистрирует только (вторые) измерения акселерометров, команды могут быть скорректированы простым образом путем добавления положительных или отрицательных приращений к скорости вращения: повышение скорости вращения на один шаг в случае, если относительное отклонения смещения опустится ниже нижнего предела допустимого диапазона, и уменьшение скорости вращения на один шаг в случае, если относительное отклонения смещения превысит верхний предел второго допустимого диапазона. Если относительное отклонение смещения лежит вне удвоенного допустимого диапазона наблюдения, являющегося удвоенным допустимым диапазоном регулирования и имеющим с ним один центр, можно принять решение об остановке двигателя MT и, тем самым, испытания.
Когда система автоматического регулирования регистрирует одновременно (вторые) измерения акселерометров и (первые) измерения напряжений (тензометры), указания могут также быть скорректированы добавлением положительных или отрицательных приращений. Например, можно сравнивать относительные отклонения смещения (акселерометры) с допустимым диапазоном смещений (в процентах), как указано выше, и сравнить отклонения напряжений (тензометры) с допустимым диапазоном напряжений (в процентах). В этом случае можно решить повысить скорость вращения на один шаг, если относительное отклонение напряжения опустится ниже нижнего предела второго допустимого диапазона, каким бы ни было относительное отклонение смещения, лишь бы оно находилось внутри допустимого диапазона наблюдения, который ему соответствует. Аналогично, можно решить уменьшить скорость вращения на один шаг, если относительное отклонение напряжения превысит верхний предел второго допустимого диапазона, каким бы ни было значение относительного отклонения смещения, лишь бы оно находилось внутри допустимого диапазона наблюдения, который ему соответствует. В случае, если относительное отклонение напряжения или смещения превышает допустимый диапазон наблюдения, который ему соответствует, можно принять решение остановить двигатель MT и, тем самым, испытание. Можно также решить, что если относительные отклонения напряжения и смещения требуют противоположного знака приращения скорости вращения, испытание останавливается.
Установка может также работать в режиме, называемом "вырожденным". Согласно этому режиму, применяющемуся в основном при наличии усталостной трещины заметного размера, поскольку усталостная трещина может ограничивать только эффект от напряжения, испытываемого образцом ET, скорость вращения повышают на один шаг, когда выходят за допустимый диапазон регулирования.
Ниже приводится более подробное описание, со ссылкой на фиг.1, устройства, позволяющего установке I осуществлять регулирование или отбор измерений, проведенных различными датчиками и, в частности, ее тензометрами Jk и парами акселерометров Ai1, Ai2.
Компьютер PC снабжен, например, картой аналоговых и цифровых вводов/выводов CI и картой анализа СA.
Карта аналоговых и цифровых вводов/выводов CI является, например, картой типа Measurement Computing PCI-DAS 1602/16. Такая карта содержит, например:
- 8 цифровых вводов, позволяющих получить логическую информацию об устройствах нагружения (или стенда) и для них, как, например, согласие на начало испытания или обнаружение наличия образца ET. Параметры этих 8 вводов предпочтительно определяются инженером;
- 8 аналоговых вводов, позволяющих получить непрерывные (или на постоянном токе) "медленные" сигналы (или измерения), как, например, о давлении (CP) или температуре (CT);
- 4 цифровых вывода, позволяющих отдать команды на работу щита управления ARC, который содержит регулятор скоростей VR. Один из цифровых выводов используется, например, как сторожевая схема (или "WatchDog"). Блок управления MC в этом случае ответственен за изменение состояния этого вывода WatchDog с регулярными интервалами. Это изменение состояния проводится с помощью реле замедленного воздействия щита ARC. Таким образом, в случае несвоевременной остановки приложения (вызванной, например, неисправностью программного обеспечения или повреждением компонентов) реле замедленного действия останавливает работу двигателя MT;
- 1 аналоговый вывод, позволяющий отдавать приказания регулятору скоростей VR.
Карта анализа СA является, например, картой типа GROS OR25 PCJPACK H-316 (с 16 каналами ввода данных). Она должна собирать и анализировать переменные измерения (на переменном токе), выдаваемые определенными датчиками (тензометрами, акселерометрами), в виде динамических сигналов.
Измерения тензометров Jk предпочтительно обрабатываются модулем обработки сигналов MCS, например, типа процессора HBM, до того, как перенести их в карту анализа СA.
Карта анализа СA соединена, например, с компьютером PC через карту интерфейса PCI/PCMCIA.
Часть, предназначенная для анализа сигналов в карте анализа СA, содержит, например, анализатор OR25, включающий аналитический модуль типа OR763 для частотного анализа с помощью быстрого преобразования Фурье или FFT (от "Fast Fourier Transform"), и записывающего модуля типа OR773.
Режим измерения, используемый анализатором OR 25, является, например, режимом FFT в реальном времени. Учитывая диапазон частот вибрационного возбуждения (обычно от 10 до 50 Гц), анализируемая полоса должна быть ограничена интервалом примерно от 50 до 100 Гц.
Когда шаг изменения регулировки скорости потенциометром регулятора скоростей VR составляет порядка 2/100 оборота, это соответствует изменению частоты порядка 0,1 Гц. Разрешение измерения (которое определяется отношением полосы анализа к числу спектральных линий) должно, следовательно, быть меньше или равно этому шагу изменения. Длительность каждого измерения обратно пропорциональна этому частотному разрешению: например, для разрешения 0,05 Гц длительность измерения составляет 20 секунд. Регулировка этого разрешения проводится в анализаторе посредством числа спектральных линий. Инженер имеет возможность изменять эту установку разрешения, чтобы управлять длительностью измерения.
Анализатор OR 25 производит измерения спектров по модулю и по фазе, синхронизованных с тахометрическим сигналом, выдаваемым датчиком вращения (или оборотов, или циклов) DR, с которым он соединен. Эти измерения предпочтительно усредняются по времени. Может предусматриваться регулировка ряда средних по времени. Блок управления MC рассчитывает и позволяет вывести на экран компьютера PC длительность сбора. По определению, длительность промежутка времени между двумя измерениями системы автоматического регулирования равна произведению длительности сбора на число определенных средних.
Выгодно управлять насыщениями канала ввода карты анализа CA. В этом случае для каждого канала анализатора определяют спектр входных значений для аналогового/цифрового преобразователя карты анализа СA. Анализатор позволяет обнаружить насыщение преобразователя при измерении, характеризующее ошибочные измерения. Регулировка диапазона входных значений позволяет использовать для измерения всю цифровую динамику преобразователя (например, 16 бит).
Анализатор OR25 может также располагать режимом автокалибровки диапазона входных значений. Исходя из максимальных сигналов он определяет в этом случае установку оптимальных диапазонов для каждого канала ввода данных. К каждому оптимальному значению при необходимости может добавляться запас прочности.
Таким образом, инженер может определить для каждого канала ввода спектр входных значений, фиксированно или автоматически (и соответствующий им возможный запас прочности). Важно отметить, что при испытании любое обнаружение насыщения во время измерения вызывает регистрацию события и остановку испытания.
Анализатор OR25 дает для каждой пары используемых акселерометров значение синхронизованной фазы посредством каждого тахометрического сигнала (или сигнала о повороте), выдаваемого датчиком вращения DR. Это значение фазы характеризует в действительности относительный фазовый сдвиг между двумя акселерометрам пары, установленной на уровне участка образца ET. Анализатор OR25 предлагает отличную синхронизацию различных измеренных сигналов в отношении каждого сигнала о повороте.
Измерение фазы может проводиться корректно, только если имеется сигнал о повороте. В случае потери тахометрического сигнала анализатор не начинает измерений. Блок управления MC обнаруживает проблему, когда сигналы о повороте не детектируются в течение выбранного срока (равного, например, 2 секундам).
Сигналы тензометров Jk предпочтительно собираются и анализируются так же, как сигналы, поступающие с пары акселерометров. Таким образом, на экране компьютера PC можно проследить за эволюцией напряжения, испытываемого образцом, исследуемого на уровне каждого участка, снабженного тензометром Jk.
Выход датчика вращения DR соединен, например, не только с картой анализа CA, но также с блоком подсчета оборотов BCT, таким, как блок ADAM 4080, который, в свою очередь, связан через шину RS485 с блоком коммуникации BCN, таким, как блок ADAM 4520, соединенный с последовательным портом компьютера PC системой связи RS232C.
Подсчет числа оборотов позволяет определить число циклов изгиба, которому подвергается образец от начала опыта до его остановки (из-за разрыва образца, утечки внутреннего давления, недееспособности системы автоматического регулирования в конкретном допустимом интервале, работы слишком близко от резонансной частоты или любой другой причины, предусмотренной для прекращения опыта).
Подсчет оборотов (или вращений, или циклов) блоком управления MC осуществляется путем регулярного считывания строк на последовательном порте. Например, каждая ошибка связи, распознанная во время регулирования системой автоматического регулирования, порождает отказ от подсчета числа оборотов (или циклов), которые прерывает система автоматического регулирования.
Блок управления MC может быть выполнен в виде электронной схемы (или "железа"), логических (или информационных, или программных) модулей или в виде комбинации электронной схемы и логического модуля.
Изобретение не ограничено способами реализации установки для нагрузки и способов нагрузки, описанных выше исключительно в качестве примера, но оно охватывает все варианты, которые может предполагать специалист в рамках нижеследующей формулы изобретения.
Целью изобретения является, например, применение к трубчатому образцу, состоящему из двух труб, соединенных между собой любым другим способом соединения, отличного от резьбы.
Образцы могут также состоять из двух труб, соединенных сваркой любого типа, причем термин "сварка" понимается здесь в широком значении и охватывает, в частности, способы сварки с плавлением (с или без присадки) или без плавления, сварку-пайку или пайку, диффузию в твердом состоянии и/или в жидком состоянии (описанные, например, в патентных документах EP1418376, US6288373, WO99/08828), или также путем взаимопроникновения материалов соединяемых поверхностей, например, типа магнитного формования или формовки взрывом.
Образцы могут также содержать две трубы, соединенные одной или несколькими соединительными деталями, такими, например, как съемные фланцы на концах труб).
Соединения между трубами могут также быть соединениями типа описанных в патенте US5681059, функционирующими благодаря совместным действием ряда кольцевых выпуклых структур и пазов, расположенных на наружной поверхности одной трубы и внутренней поверхности другой трубы.
Изобретение предназначено также для применения к трубчатому образцу, состоящему из более чем двух труб, соединенных между собой любым способом соединения. Так, в частности, можно задать зону испытаний на уровне каждого соединения или сопряжения. В таком случае можно использовать несколько пакеров. Альтернативно, можно использовать один пакер, на котором было определено несколько зон. Можно также использовать несколько вторых средств создания давления для приложения первых внутренних давлений независимо друг от друга в каждой зоне испытаний.
Можно также использовать несколько третьих средств создания давления для приложения вторых внутренних давлений независимо друг от друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОРАЗОВОЕ УСТРОЙСТВО ДЛЯ СТРАДАЮЩИХ НЕДЕРЖАНИЕМ МОЧИ С ПОКРЫВАЮЩИМ СЛОЕМ | 2010 |
|
RU2563219C2 |
| Способ определения вибродемпфирующих и звукоизолирующих свойств конструкционных материалов и стендовая измерительная установка для его осуществления | 2018 |
|
RU2677934C1 |
| СИСТЕМА И СПОСОБ МОДЕЛИРОВАНИЯ МОЩНОГО ПИРОУДАРА | 2012 |
|
RU2595322C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПЛАСТА (ВАРИАНТЫ) | 2005 |
|
RU2378511C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ЖИДКОСТИ В ПЛАСТ | 2002 |
|
RU2320867C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СНИЖЕНИЯ ПРОТИВОДАВЛЕНИЯ В ДВИГАТЕЛЕ | 2013 |
|
RU2628846C2 |
| СИСТЕМА ДЛЯ ИСПЫТАНИЯ НА ГЕРМЕТИЧНОСТЬ ПОД ДАВЛЕНИЕМ | 2012 |
|
RU2605854C2 |
| СПОСОБ ИСПЫТАНИЯ БАРЬЕРА | 2013 |
|
RU2660704C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ТРУБЫ В СКВАЖИНЕ ПРИ БУРЕНИИ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ПАКЕР ДЛЯ УПЛОТНЕНИЯ ТРУБЫ | 1999 |
|
RU2230170C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОТОКА ЖИДКОСТИ В СКВАЖИНЕ | 2017 |
|
RU2659106C1 |
Группа изобретений относится к испытаниям на механическую нагрузку трубчатых образцов (способ, установка механического нагружения трубчатого образца, применение способа и установки). Установка содержит, по меньшей мере, один пакер (Р), размещенный в образце (ЕТ) в зоне испытаний (ZT), имеющий продольный размер, превышающий протяженность этой зоны испытаний (ZT), и включающий i) первое средство создания давления (С1), для локального изменения диаметра по меньшей мере одной первой части пакера (Р), для его прижатия к внутренней поверхности образца (ЕТ) на уровне зоны испытаний (ZT), ii) второе средство создания давления (С2), предназначенное для приложения первого выбранного внутреннего давления к части внутренней поверхности, находящейся на уровне второй части пакера (Р), и/или iii) третье средство создания давления (С3) для совместного действия с по меньшей мере одним перекрывающим элементом (B1, B2), прикрепленным к образцу на некотором расстоянии от конца пакера (Р), с целью задания зоны действия (ZA), для прикладывания к образцу (ЕТ) второго выбранного внутреннего давления на уровне зоны воздействия (ZA). Группа испытуемых образцов может представлять собой различные комбинации соединений труб. Технический результат - разработка альтернативы статическим установкам, в которых одновременно используется домкрат и находящаяся под давлением среда. 3 н. и 45 з.п. ф-лы, 8 ил.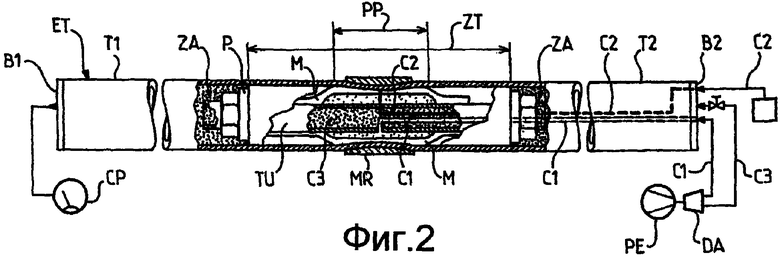
1. Установка (I) механического нагружения трубчатого образца (ЕТ), отличающаяся тем, что она содержит, по меньшей мере, один пакер (Р), помещенный в указанный образец (ЕТ) в зоне испытаний (ZT), имеющий продольный размер, превышающий протяженность указанной зоны испытаний (ZT), содержащий i) первое средство создания давления (С1), способное локально менять диаметр, по меньшей мере, первой части указанного пакера для его прижатия к внутренней поверхности указанного образца (ЕТ) на уровне зоны испытаний (ZT), ii) второе средство создания давления (С2) для прикладывания выбранного первого внутреннего давления к части указанной внутренней поверхности, находящейся на уровне второй части указанного пакера (Р), и/или iii) третье средство создания давления (С3), способное действовать совместно с, по меньшей мере, одним перекрывающим элементом (В1, В 2), прикрепленным к образцу на некотором расстоянии от концов указанного пакера (Р), для формирования зоны воздействия (ZA), и прикладывания к указанному образцу (ЕТ) выбранного второго внутреннего давления на уровне указанной зоны воздействия (ZA).
2. Установка по п.1, отличающаяся тем, что она содержит, по меньшей мере, один тензометр (Jk), помещаемый в выбранное место наружной поверхности указанного образца (ЕТ) для выдачи результатов первых измерений напряжений, характеризующих напряженное состояние, которому подвергается указанный образец в указанном выбранном месте.
3. Установка по одному из пп.1 и 2, отличающаяся тем, что она содержит, по меньшей мере, два тензометра (Jk), предназначенные для размещения на двух разных выбранных концах указанной наружной поверхности образца (ЕТ) для выдачи результатов первых измерений напряжения, характеризующих напряженное состояние, испытываемое указанным образцом на уровне каждого из указанных выбранных мест.
4. Установка по одному из пп.1 и 2, отличающаяся тем, что она дополнительно содержит i) два опорных средства (Sl, S2), способных поддерживать указанный образец (ЕТ), ii) ротационный двигатель (МТ) в паре с устройством возбуждения (ВО, AR'), оборудованным устройством со смещенным центром масс (DME), соединенным с одним концом образца (ЕТ) и задающим противовес, и iii) средства управления (МС), способные отдать команду указанному двигателю (МТ) привести во вращение в соответствии с регулируемой скоростью указанную эксцентриковую массу, чтобы подвергнуть указанный образец (ЕТ) выбранному вибрационному возбуждению под действием указанного противовеса, чтобы циклически деформировать его изгибом.
5. Установка по п.4, отличающаяся тем, что, по меньшей мере, одно из указанных опорных средств (51, 52) выполнено с возможностью быть установленным по существу в узле колебаний указанного образца.
6. Установка по одному из п.2 или 5, отличающаяся тем, что средства управления (МС) предназначены для подстройки скорости вращения двигателя (МТ) в зависимости от амплитуды напряжения, воздействующему на указанный образец (ЕТ).
7. Установка по п.4, отличающаяся тем, что она содержит, по меньшей мере, одну пару акселерометров (A11, A12), предназначенную для размещения под углом 90° друг к другу в выбранных местах указанной наружной поверхности образца (ЕТ), для выдачи результатов вторых измерений, характеризующих смещение, которые испытывает указанный образец, причем указанные средства управления (МС) предназначены для установки скорости вращения двигателя (МТ) в зависимости от результатов последних вторых измерений, выданных указанной парой акселерометров (A11, A12), с возможностью поддержания постоянной амплитуды радиального смещения из-за изгиба, испытываемого указанным образцом (ЕТ) в выбранном месте.
8. Установка по п.7, отличающаяся тем, что она содержит, по меньшей мере, две пары акселерометров (А11, A12, Ai'l, Ai'2), причем акселерометры каждой пары предназначены для установки под углом 90° друг к другу в других выбранных местах указанной наружной поверхности образца (ЕТ), для выдачи результатов других вторых измерений, полученных в других выбранных местах и характеризующих смещения, испытываемые указанным образцом в указанных других выбранных местах, причем указанные средства управления (МС) выполнены с возможностью осуществлять комбинации результатов последних вторых измерений для установления скорости вращения двигателя (МТ) в функции от указанных комбинаций для того, чтобы амплитуда смещения из-за изгиба, испытываемого указанным образцом в указанных выбранных местах, оставалась по существу постоянной.
9. Установка по п.8, отличающаяся тем, что трубчатый образец (ЕТ) состоит из, по меньшей мере, двух трубчатых элементов (T1, T2), соединенных между собой на уровне указанной зоны испытаний (ZT), и двух пар акселерометров (Ai1, Ai2, Ai'1, Ai'2), помещенных с одной и другой стороны соединения.
10. Установка по одному из п.п.7-9, отличающаяся тем, что средства управления (МС) предназначены для сравнения, по меньшей мере, результатов указанных последних вторых измерений, выдаваемых, по меньшей мере, одной из указанных пар акселерометров (Ai1, Ai2, Ai'1, Ai'2), с результатами вторых базовых измерений, характеризующих начальную амплитуду смещения, соответствующую искомой амплитуде смещения из-за изгиба, в выбранном месте, с последующей установкой указанной скорости вращения двигателя (МТ) в зависимости от результата указанного сравнения.
11. Установка по п.10, отличающаяся тем, что указанные средства управления (МС) предназначены для определения относительного отклонения амплитуды смещения, представленной указанными результатами последних вторых измерений, от указанной искомой амплитуды смещения из-за изгиба, для сравнения этого отклонения с допустимым интервалом, называемым диапазоном регулирования, и для корректировки скорость вращения двигателя (МТ), когда указанное отклонение превышает указанный диапазон регулирования.
12. Установка по п.4, отличающаяся тем, что она содержит устройство детектирования вращения (DR), выполненное с возможностью регистрации любого вращения, вызываемого указанным двигателем (МТ).
13. Установка по п.12, отличающаяся тем, что устройство детектирования вращения (DR) предназначено для направления сигнала, характеризующего любое обнаруженное вращение, на указанные средства управления (МС) для обеспечения возможности подстройки последними скорости вращения двигателя (МТ) всякий раз, когда число полученных сигналов станет равным выбранному числу.
14. Установка по одному из пп.1, 2, 5, 7-9, 11, 12, 13, отличающаяся тем, что пакер (Р) содержит по существу недеформируемую основу (TU), на которой установлена кольцевая деформируемая мембрана (М), причем первое средство создания давления содержит первую схему подачи жидкой или газовой среды (С1), вводящую выбранную среду между указанной по существу недеформируемой основой (TU) и указанной мембраной (М) для установки выбранного давления.
15. Установка по п.14, отличающаяся тем, что указанная среда является жидкостью под давлением.
16. Установка по одному из пп.1, 2, 5, 7-9, 11, 12, 13, 15, отличающаяся тем, что указанное второе средство создания давления содержит вторую схему подачи среды (С2), включающую выход среды, открывающийся против указанной внутренней поверхности образца (ЕТ) для установки первого выбранного внутреннего давления.
17. Установка по п.16, отличающаяся тем, что вторая схема подачи среды (С2) проходит герметично через мембрану (М).
18. Установка по п.16, отличающаяся тем, что она содержит средство обнаружения утечки (MDF), расположенное вблизи наружной поверхности указанного образца (ЕТ) в зоне испытаний (ZT) и предназначенное для обнаружения на поверхности образца (ЕТ) возможной утечки среды, подаваемой по указанной второй схеме подачи (С2).
19. Установка по п.16, отличающаяся тем, что среда, циркулирующая во втором средстве создания давления, является газом.
20. Установка по одному из пп.1, 2, 5, 7-9, 11-13, 15, 17-19, отличающаяся тем, что указанное третье средство создания давления содержит третью схему подачи среды (С3), направляющую среду в каждую зону воздействия для прикладывания к образцу (ЕТ) выбранного второго внутреннего давления.
21. Установка по п.20, отличающаяся тем, что указанная среда третьего средства создания давления является жидкостью под давлением.
22. Установка по п.20, отличающаяся тем, что она содержит устройство переключения (DA), соединенное с первой (С1) и третьей (С3) схемами подачи среды, и насос (РЕ), соединенный с указанным устройством переключения (DA).
23. Установка по п.14, отличающаяся тем, что основа (TU) пакера (Р) является трубой, образующей полую центральную линию, задающую часть третьей схемы подачи среды (С3) и содержащую два противоположных конца, по меньшей мере, один из которых входит в зону воздействия (ZA), чтобы вводить среду.
24. Установка по одному из пп.1, 2, 5, 7-9, 11-13, 15, 17-19, 21-23, отличающаяся тем, что она содержит два перекрывающих элемента (B1, B2), установленных на расстоянии от двух концов указанного пакера (Р), для задания, по меньшей мере, одной зоны воздействия (ZA) и прикладывания к указанному образцу указанного выбранного второго внутреннего давления на уровне зоны воздействия (ZA).
25. Установка по п.23, отличающаяся тем, что часть первой схемы подачи среды (С1) и/или часть второй схемы подачи среды (С2) находится внутри указанной центральной линии.
26. Установка по одному из пп.1, 2, 5, 7-9, 11-13, 15, 17-19, 21-23, 25, отличающаяся тем, что она содержит, по меньшей мере, один датчик температуры (СТ), предназначенный для установки в выбранное место образца (ЕТ) для выдачи результатов третьих измерений, характеризующих температуру образца в выбранном месте.
27. Установка по одному из пп.1, 2, 5, 7-9, 11-13, 15, 17-19, 21-23, 25, отличающаяся тем, что она содержит, по меньшей мере, один датчик давления (СР), предназначенный для установки в выбранное место образца (ЕТ), для выдачи результатов четвертых измерений, характеризующих внутреннее давление указанного образца в этом выбранном месте.
28. Установка по одному из пп.1, 2, 5, 7-9, 11-13, 15, 17-19, 21-23, 25, отличающаяся тем, что указанные средства управления предназначены для сравнения первых результатов, полученных, по меньшей мере, в ходе некоторых первых измерений, со вторыми результатами, полученными в ходе, по меньшей мере, некоторых вторых измерений, для выдачи разрешения продолжить испытания, когда первые результаты соответствуют вторым результатам.
29. Установка по п.4, отличающаяся тем, что средства управления (МС) предназначены для подачи команды двигателю (МТ) в ходе испытания на нагрузку привести во вращение указанную эксцентриковую массу (ОМЕ,) согласно выбранной последовательности скоростей вращения, чтобы подвергнуть указанный образец (МТ) выбранной последовательности вибрационных возбуждений.
30. Способ механического нагружения трубчатого образца (ЕТ), отличающийся тем, что вводят в указанный образец (ЕТ) на уровне зоны испытаний (ZT), по меньшей мере, один пакер (Р), имеющий продольный размер, превышающий протяженность указанной зоны испытаний (ZT) и содержащий первое (С1), второе (С2) и/или третье (С3) средства создания давления, производят локальное изменение диаметра, по меньшей мере, первой части пакера (Р) с помощью первого средства создания давления (С1) для прижатия пакера (Р) к внутренней поверхности образца (ЕТ) на уровне зоны испытаний (ZT) и прикладывания с помощью указанного второго средства создания давления (С2) выбранного первого внутреннего давления к части внутренней поверхности, расположенной на уровне второй части пакера (Р), и/или прикрепляют к образцу (ЕТ), по меньшей мере, один перекрывающий элемент (B1, B2) на расстоянии от одного конца указанного пакера (Р) для задания зоны воздействия (ZA) и прикладывания к образцу (ЕТ) посредством третьего средства создания давления (С3), второго выбранного внутреннего давления на уровне указанной зоны воздействия (ZA).
31. Способ по п.30, отличающийся тем, что, по меньшей мере, в одном выбранном месте наружной поверхности образца (ЕТ) предусматривают, по меньшей мере, один тензометр (Jk) для получения результатов первого измерения напряжения, характеризующих напряженное состояние, испытываемое указанным образцом на уровне указанного выбранного места.
32. Способ по одному из пп.30 и 31, отличающийся тем, что, по меньшей мере, в двух выбранных местах на наружной поверхности указанного образца (ЕТ) предусматривают, по меньшей мере, два тензометра (Jk) для получения результатов первых измерений напряжений, характеризующих напряженное состояние, испытываемое указанным образцом на уровне каждого из указанных выбранных мест.
33. Способ по одному из пп.30 и 31, отличающийся тем, что дополнительно предусматривают два опорных средства (S1, S2), на которые устанавливают указанный образец (ЕТ), и ротационный двигатель (МТ) в паре с устройством возбуждения (В, AR'), снабженным устройством со смещенным центром масс (DME), закрепленным на одном конце образца (ЕТ) и задающим противовес, и эксцентриковую массу (DME) приводят во вращение с помощью двигателя (МТ) с регулируемой скоростью для придания требуемой вибрации образцу (ЕТ), зависящей от противовеса, для его циклической деформации изгибом.
34. Способ по п.33, отличающийся тем, что, по меньшей мере, указанные опорные средства (51, 52) помещают на уровне узла колебаний указанного образца (ЕТ).
35. Способ по п.31, отличающийся тем, что в ходе предварительного базового этапа в начале выбирают начальную скорость вращения двигателя (МТ) в зависимости от амплитуды напряжения, передаваемого на указанный образец (ЕТ).
36. Способ по п.35, отличающийся тем, что после предварительного базового этапа подстраивают скорость вращения двигателя (МТ) с возможностью поддержания постоянной полученной первыми измерениями амплитуды напряжения изгиба, испытываемого указанным образцом (ЕТ).
37. Способ по п.33, отличающийся тем, что в выбранных местах указанной наружной поверхности образца (ЕТ) предусматривают, по меньшей мере, одну пару акселерометров (A11, A12), смещенных относительно друг друга на 90° и предназначенных для выдачи вторых измерений, характеризующих смещение, которые испытывает указанный образец (ЕТ), при этом скорость вращения двигателя (МТ) подстраивают в зависимости от последних вторых измерений, выданных каждой парой акселерометров (Ai1, Ai2) с возможностью поддержания постоянной амплитуды радиального смещения из-за изгиба, испытываемого указанным образцом (ЕТ) в выбранном месте.
38. Способ по п.37, отличающийся тем, что в других выбранных местах указанной наружной поверхности образца предусматривают, по меньшей мере, две другие пары акселерометров (Ai1, Ai2, Ai'l, Ai'2), причем акселерометры каждой пары смещены на 90° по отношению друг к другу в других выбранных местах указанной наружной поверхности образца (ЕТ) и предназначены для выдачи результатов других вторых измерений, характеризующих смещения, которые испытывает указанный образец (ЕТ) на уровне других выбранных мест, при этом осуществляют комбинации результатов последних вторых измерений для установления скорости вращения двигателя (МТ) в зависимости от указанных комбинаций с возможностью поддержания постоянной амплитуды смещения из-за изгиба, испытываемого указанным образцом (ЕТ) в выбранных местах.
39. Способ по одному из п.37 или 38, отличающийся тем, что сравнивают, по меньшей мере, результаты последних вторых измерений, поступивших с, по меньшей мере, одной пары акселерометров (Аi1, Ai2, Ai'1, Ai'2), с результатами вторых базовых измерений, представляющих начальную амплитуду смещения, соответствующую искомой амплитуде смещения из-за изгиба, в выбранном месте, и устанавливают скорость вращения двигателя (МТ) в зависимости от результата указанного сравнения.
40. Способ по п.39, отличающийся тем, что определяют относительное отклонение амплитуды смещения, представляемой результатами последних вторых измерений, от указанной искомой амплитуды смещения при изгибе, затем сравнивают это отклонение с границами допустимого интервала, называемого диапазоном регулирования для подстройки скорости вращения двигателя, когда это отклонение выходит за указанный диапазон регулирования.
41. Способ по п.33, отличающийся тем, что детектируют каждое вращение, вызываемое указанным двигателем (МТ).
42. Способ по п.41, отличающийся тем, что указанную скорость вращения двигателя (МТ) подстраивают всякий раз, когда число полученных сигналов станет равным выбранному числу.
43. Способ по одному из пп.30, 31, 34, 35-38, 40-42, отличающийся тем, что предусматривают, по меньшей мере, один датчик температуры (СТ), установленный в выбранное место указанного образца (ЕТ), для получения результатов третьих измерений, характеризующих температуру образца в этом выбранном месте.
44. Способ по одному из пп.30, 31, 34, 35-38, 40-42, отличающийся тем, что предусматривают, по меньшей мере, один датчик давления (СР), установленный в выбранное место образца (ЕТ) для получения результатов четвертых измерений, характеризующих внутреннее давление указанного образца в этом выбранном месте.
45. Способ по п.33, отличающийся тем, что в ходе испытания на нагрузку двигателю (МТ) отдают команду привести во вращение устройство со смещением центра масс (DME) в соответствии с выбранной последовательностью скоростей вращения, чтобы подвергнуть его выбранной последовательности вибрационных возбуждений.
46. Способ по одному из пп.30, 31, 34-38, 40-42, 45, отличающийся тем, что сравнивают первые результаты напряжения, полученные из, по меньшей мере, некоторых указанных первых измерений, со вторыми результатами по радиальному смещению, полученными из, по меньшей мере, некоторых указанных вторых измерений, чтобы разрешить продолжать испытание, когда первые результаты совместимы со вторыми результатами.
47. Способ по одному из пп.30, 31, 34-38, 40-42, 45, отличающийся тем, что проводят обнаружение утечки с периметра указанного образца (ЕТ) на уровне указанной зоны испытаний (ZT).
48. Применение способа и установки (I) по одному из предшествующих пунктов для нагружения образцов (ЕТ), выбранных из группы, содержащей i) одиночную трубу, ii) первый трубчатый элемент, задающий первую трубу, и второй трубчатый элемент, задающий вторую трубу и соединенный сваркой с указанной первой трубой, iii) первый трубчатый элемент, задающий первую трубу, снабженный наружной резьбой, и второй трубчатый элемент, задающий вторую трубу, снабженный внутренней резьбой, предназначенной для совместного действия с указанной наружной резьбой для образования резьбового соединения, iv) первый трубчатый элемент, задающий первую трубу, снабженный наружной резьбой, второй трубчатый элемент, задающий вторую трубу, снабженный наружной резьбой, и третий трубчатый элемент, задающий соединительную муфту, снабженную с двух сторон внутренней резьбой, предназначенной для совместного действия с соответствующей указанной наружной резьбой для образования резьбового соединения, и v) первый трубчатый элемент, задающий первую трубу, снабженный на своей наружной поверхности рядом кольцевых выступов и пазов, и второй трубчатый элемент, задающий вторую трубу, снабженный на своей внутренней поверхности рядом кольцевых выступов и пазов, соответствующих указанному наружному ряду, предназначенным для совместного действия с указанным наружным рядом для образования соединения между двумя трубами.
| US 6161425 А, 19.12.2000 | |||
| RU 2055977 С1, 10.03.1996 | |||
| ПОРОГОВЫЙ ЭЛЕМЕНТ ТРОИЧНОЙ ЛОГИКИ НА ТОКОВЫХ ЗЕРКАЛАХ | 2016 |
|
RU2618901C1 |
| DE 3827080 А1, 15.02.1990 | |||
| WO 2004003330 А2, 08.01.2004. | |||

