Изобретение относится к измерительной технике и может быть использовано для измерения ускорений, вызываемых колебаниями основания, на котором установлен трехкоординатный акселерометр, в том числе и при скважинных измерениях и обеспечения контроля метрологических характеристик измерительного устройства путем проведения его периодических калибровок в месте измерений.
Известна поворотная установка, включающая поворотную платформу с датчиками положений, коммутатор, ЭВМ, аналого-цифровой преобразователь, регистры хранения и состояния, буфер входа, три шинных формирователя, четыре дешифратора, два электронных ключа, три логических устройства И, два логических устройства ИЛИ, усилители (RU №2184979, G01P 21/00, 2000 г.).
Недостатком данной поворотной установки является низкая точность измерений угловых положений платформы из-за ограниченных возможностей измерения угловых положений и отсутствия возможности получения динамических характеристик отклика акселерометров на разных частотах.
Известно устройство для дистанционной калибровки акселерометра в составе измерительного преобразователя, включающее корпус, электронную схему обработки сигнала акселерометра, калибровочный узел в виде поворотной платформы, кулачка в виде кардиоиды, четырех арретиров, четырех пружин и четырех электромагнитов (RU №2272299, G01P 21/00, 2005).
Недостатком данной поворотной установки является низкая точность и достоверность измерений из-за невозможности проведения динамической калибровки акселерометра и получения его основных характеристик на разных частотах, а также неточности задания угловых положений калибровочной платформы, соответствующих каждой из четырех задаваемых ориентаций.
Наиболее близкой по технической сущности к предлагаемому изобретению является поворотная установка, включающая основание, установленную в нем платформу, n оптоэлектронных пар, усилители, коммутатор, двигатель с редуктором, диск на валу платформы, ЭВМ, аналого-цифровой преобразователь, регистры хранения и состояния, буфер входа, три шинных формирователя, четыре дешифратора, три логических устройства И, два логических устройства ИЛИ, два электронных ключа, электромагнитное реле. Оптоэлектронные пары расположены в одном ряду по радиусу от оси вала, на диске выполнены ряды отверстий, каждое отверстие расположено на одном из радиусов от оси вала (RU №2267749, G01P 21/00, 2004).
Недостатком данного устройства является низкая точность и достоверность измерений, т.к. невозможно точно определить величину ускорений.
Техническим результатом является повышение точности и достоверности измерений за счет проведения динамической калибровки акселерометров на разных частотах и автоматического учета изменения параметров акселерометров, выявленных с помощью калибровки.
Технический результат достигается в трехкоординатном акселерометре, включающем калибровочную платформу, установленную с возможностью колебаний вокруг горизонтальной оси с заданной частотой, три однокоординатных датчика ускорений, расположенных на калибровочной платформе таким образом, чтобы их оси чувствительности не совпадали с осью колебаний калибровочной платформы, электромотор с датчиком положения ротора и редуктором, на выходном вале которого жестко закреплен диск с отверстиями, выполненными по одной окружности, блок задания угловых колебаний калибровочной платформы, соединенный с диском и выполненный в виде двух рычагов, один из которых одним концом шарнирно соединен с диском, а другим - шарнирно связан со вторым рычагом, другой конец второго рычага жестко закреплен на калибровочной платформе, оптоэлектронный блок с фотодиодом и фотоприемником, блок управления, регистрации и обработки результатов измерений и калибровки, модуль управления калибровкой, один вход которого соединен с блоком управления, регистрации и обработки результатов измерений и калибровки, второй - с оптоэлектронным блоком, а третий - с выходом датчика положения ротора, один выход - с электромотором, другой выход - с блоком управления, регистрации и обработки результатов измерений и калибровки, частотные фильтры, входы которых соединены с датчиками ускорений, блок аналого-цифрового преобразователя, входы которого соединены с выходами частотных фильтров, контроллер, вход которого соединен с выходом блока аналого-цифрового преобразователя, а выход - с входом блока управления, регистрации и обработки результатов измерений и калибровки, при этом диск расположен между фотодиодом и фотоприемником так, чтобы отверстия диска при его вращении проходили между фотодиодом и фотоприемником, а два однокоординатных датчика ускорений с горизонтальными осями чувствительности расположены по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы, а третий - на оси колебаний калибровочной платформы.
Отличительными признаками предлагаемого изобретения являются установка калибровочной платформы с возможностью колебаний вокруг горизонтальной оси с заданной частотой, установка трех однокоординатных датчика ускорений, расположенных на калибровочной платформе, таким образом, чтобы их оси чувствительности не совпадали с осью колебаний калибровочной платформы, расположение двух однокоординатных датчика ускорений с горизонтальными осями чувствительности по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы, а третий - на оси колебаний калибровочной платформы, выполнение отверстий на диске по одной окружности, выполнение блока задания угловых колебаний калибровочной платформы в виде двух рычагов, один из которых одним концом шарнирно соединен с диском, а другим - шарнирно связан со вторым рычагом, другой конец второго рычага жестко закреплен на калибровочной платформе, снабжение акселерометра частотными фильтрами, соединение входов частотных фильтров с выходами датчиков ускорений и выходов с блоком аналого-цифрового преобразователя. Установка калибровочной платформы с возможностью колебаний вокруг горизонтальной оси с заданной частотой позволяет получить данные об амплитудных и частотных характеристиках датчиков ускорений для внесения поправок в работу акселерометра. Установка датчиков ускорений таким образом, чтобы их оси чувствительности были взаимно ортогональны, позволяет независимо измерять ускорения, действующие на акселерометр по трем направлениям X, Y и Z. Установка датчиков ускорений на калибровочной платформе таким образом, чтобы их оси чувствительности не совпадали с осью колебаний калибровочной платформы позволяет задавать ускорения, обусловленные колебаниями калибровочной платформы на этот датчик, при совпадении оси чувствительности хотя бы одного датчика ускорений с осью колебаний калибровочной платформы при ее наклоне не происходит изменения проекции ускорения свободного падения на ось чувствительности этого датчика. Расположение двух однокоординатных датчика ускорений с горизонтальными осями чувствительности по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы, а третий - на оси колебаний калибровочной платформы позволяет повысить точность и достоверность измерений. При колебаниях калибровочной платформы с заданной частотой на каждый датчик ускорений действует переменное ускорение, обусловленное как изменением проекции ускорения свободного падения на ось чувствительности датчика ускорения, так и инерционной составляющей, связанной с тем, что каждый датчик ускорения находится на некотором расстоянии от оси колебания калибровочной платформы. Расположение двух однокоординатных датчика ускорений с горизонтальными осями чувствительности по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы позволяет создать одинаковые ускорения, действующие на эти датчики ускорений, для повышения эффективности сравнительного анализа характеристик этих датчиков ускорений. Расположение третьего датчика ускорений на оси колебаний калибровочной платформы позволяет исключить влияние инерционной составляющей ускорения, действующего на этот датчик, уменьшить ошибку при калибровке. Выполнение блока задания угловых колебаний калибровочной платформы в виде двух рычагов, один из которых одним концом шарнирно соединен с диском, а другим - шарнирно связан со вторым рычагом, другой конец второго рычага жестко закреплен на калибровочной платформе позволяет повысить надежность и точность калибровки. Частота колебаний калибровочной платформы задается блоком управления, регистрации и обработки результатов измерений и калибровки и поддерживается постоянной во время калибровки с высокой точностью модулем управления калибровкой, а амплитуда угловых колебаний калибровочной платформы при ее колебаниях определяется длиной двух рычагов в блоке задания угловых колебаний калибровочной платформы, расстоянием крепления шарнира первого рычага от центра диска и координатами оси колебаний калибровочной платформы относительно оси вращения диска. Поскольку эти параметры остаются постоянными в течение всего времени эксплуатации трехкоординатного акселерометра и практически не зависят от температуры, то величины задаваемых ускорений, действующих на каждый датчик ускорения при колебаниях платформы, не изменяются, что повышает надежность и уменьшает величину ошибок калибровки.
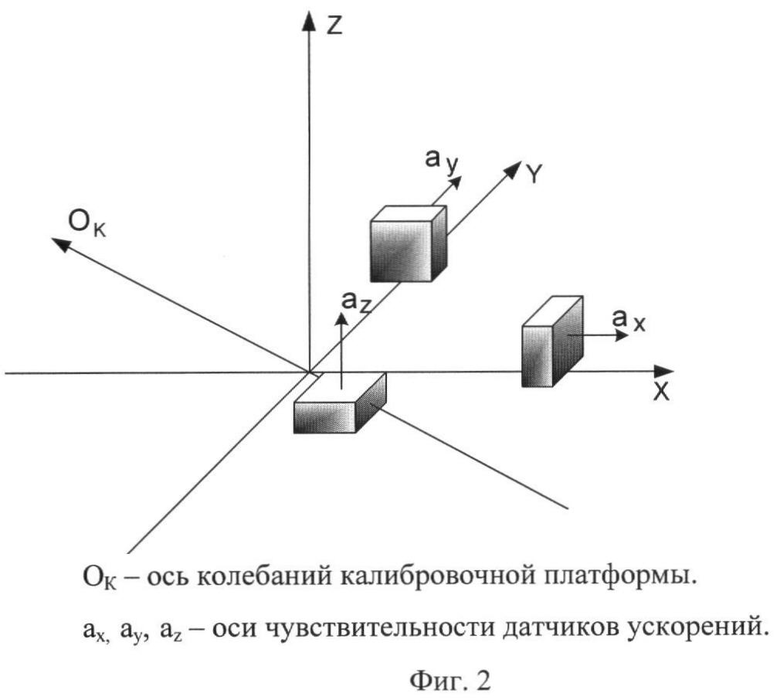
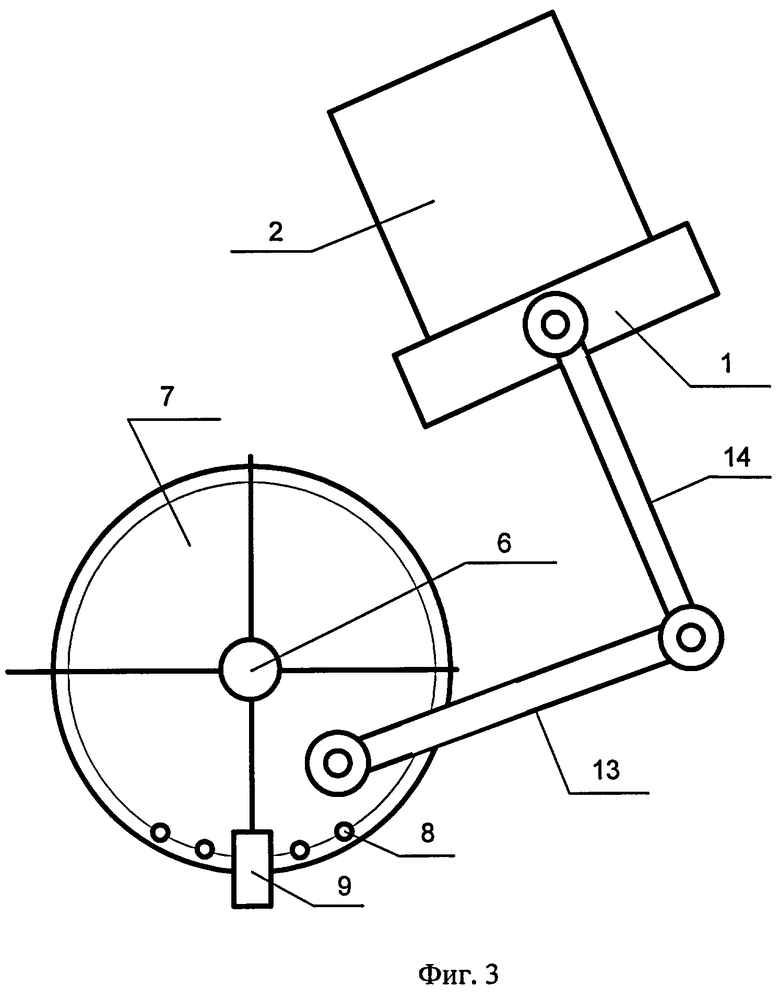
Трехкоординатный акселерометр поясняется чертежами, где на фиг.1 представлена общая схема устройства, на фиг.2 - расположение датчиков ускорения на калибровочной платформе, на фиг.3 - выполнение блока задания угловых колебаний калибровочной платформы.
Трехкоординатный акселерометр включает калибровочную платформу 1, установленную с возможностью колебаний вокруг горизонтальной оси с заданной частотой, три однокоординатных (одноосных) датчика ускорений 2, расположенных на калибровочной платформе 1 таким образом, чтобы их оси чувствительности были взаимно ортогональны и не совпадали с осью колебаний калибровочной платформы 1, электромотор 3 с датчиком положения ротора 4 и редуктором 5, на выходном вале 6 которого жестко закреплен диск 7 с отверстиями 8, выполненными по одной окружности, оптоэлектронный блок 9 с фотодиодом 10 и фотоприемником 11. Диск 7 расположен между фотодиодом 10 и фотоприемником 11 так, чтобы отверстия диска при его вращении проходили между фотодиодом 10 и фотоприемником 11. Блок 12 задания угловых колебаний калибровочной платформы 1 соединен с диском 7 и выполнен в виде двух рычагов 13 и 14, один из которых (рычаг 13) одним концом шарнирно соединен с диском 7, а другим - шарнирно связан со вторым рычагом 14, другой конец второго рычага 14 жестко закреплен на калибровочной платформе 1. Шарнир рычага 13 соединен с диском 7 на определенном расстоянии от центра. Модуль управления калибровкой 15 имеет три входа и два выхода. Первый вход модуля управления калибровкой 15 соединен с блоком 16 управления, регистрации и обработки результатов измерений и калибровки, второй - с оптоэлектронным блоком 9, а третий - с выходом датчика положения ротора 4. Выходы модуля управления калибровкой 15 соединены соответственно с электромотором 3 и блоком 16 управления, регистрации и обработки результатов измерений и калибровки. Частотные фильтры 17 (их входы) соединены с датчиками ускорений 2. Входы блока 18 аналого-цифрового преобразователя соединены с выходами частотных фильтров 17. Вход контроллера 19 соединен с выходом блока 18 аналого-цифрового преобразователя, а выход - с входом блока 16 управления, регистрации и обработки результатов измерений и калибровки. Два однокоординатных датчика 2 ускорений с горизонтальными осями чувствительности расположены по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы 1, а третий - на оси колебаний калибровочной платформы 1.
Трехкоординатный акселерометр работает следующим образом.
После начальной установки трехкоординатного акселерометра в месте проведения измерений (например, в скважине) перед началом непрерывных измерений переменных сейсмических или техногенных ускорений, воздействующих на акселерометр, проводится его калибровка. Для этого с блока 16 управления, регистрации и обработки результатов измерений и калибровки подается команда на модуль управления калибровкой 15 о включении режима калибровки и задается частота колебаний калибровочной платформы 1. С модуля 15 на электромотор 3 начинает поступать соответствующее напряжение питания, обеспечивающее вращение ротора электромотора 3 с заданной частотой, контролируемой датчиком положения ротора 4, сигнал с которого поступает на модуль управления калибровкой 15. С валом 6 редуктора 5 электромотора жестко связан диск 7, вращение которого с помощью блока 12 задания угловых колебаний калибровочной платформы 1 преобразуется в угловые колебания калибровочной платформы 1, на которой установлены три взаимно ортогональных однокоординатных датчиков ускорений 2, т.е. они установлены таким образом, что их оси чувствительности были взаимно ортогональны. Амплитуда угловых колебаний калибровочной платформы 1 определяется геометрическими размерами рычагов в блоке 12 задания угловых колебаний калибровочной платформы 1 и расстоянием шарнирного крепления конца рычага 13 на диске 7 от его центра. При колебаниях калибровочной платформы 1 вокруг горизонтальной оси на каждый датчик ускорений 2 действуют переменные ускорения, обусловленные как изменением проекции ускорения свободного падения на ось чувствительности датчика 2, так и инерционным воздействием, определяемым расстоянием датчика 2 до оси вращения калибровочной платформы 1 и первой и второй производной по времени переменного угла наклона калибровочной платформы 1. Датчики ускорений 2 на калибровочной платформе 1 расположены таким образом (фиг.2), что наклоны платформы 1 вызывают изменения действующего ускорения сразу во всех датчиках ускорений 2: оси чувствительности датчиков 2 не совпадают с осью колебаний платформы 1, а для создания равных по величине ускорений по осям x и у, датчики 2 горизонтальных ускорений расположены по одну сторону от оси колебаний калибровочной платформы 1 и на равных расстояниях до нее. Датчик ускорений 2 с вертикальной осью чувствительности располагается на оси колебаний калибровочной платформы 1 для исключения воздействия на него инерционной составляющей. Электрические сигналы с датчиков ускорений 2 проходят фильтрацию в частотных фильтрах 17 для выделения полезного сигнала в диапазоне частот от 0,1 до 10 Гц. Эта операция необходима во время режима непрерывных измерений для уменьшения влияния собственных шумов датчиков ускорений 2 и увеличения динамического диапазона измеряемых ускорений. После фильтрации аналоговые сигналы датчиков ускорений 2 поступают на блок аналого-цифрового преобразования 18, где происходит преобразование аналоговых сигналов датчиков ускорений 2 в цифровой 24-разрядный код и затем на контроллер 19, где накапливаются полученные данные в буферной памяти и передаются в блок 16 управления, регистрации и обработки результатов измерений и калибровки.
В течение определенного времени происходят угловые колебания калибровочной платформы 1 и запись показаний датчиков ускорений 2. Коэффициенты преобразования известных величин ускорений в электрический сигнал для каждого датчика ускорений 2 записываются в память блока 16 управления, регистрации и обработки результатов измерений и калибровки. Во время проведения длительных мониторинговых измерений такая операция периодически повторяется, чтобы получить информацию о стабильности коэффициентов преобразования каждого датчика ускорений 2. Таким образом, удается существенно повысить точность, достоверность и надежность получаемой информации. Важно, что не нарушается непрерывность измерений. Кроме того, проверяется работа всей цепочки системы получения информации о колебаниях почвы под действием сейсмической активности либо техногенных воздействий.
После окончания режима калибровки калибровочную платформу 1 необходимо возвратить в первоначальное горизонтальное положение с высокой точностью. Для операции точного возврата калибровочной платформы 1 в исходное положение в модуле управления калибровкой 15 предусмотрен специальный режим остановки колебаний калибровочной платформы 1, использующий сигналы с оптоэлектронного блока 9, установленного так, что между ее фотодиодом 10 и фотоприемником 11 расположен диск 7 с отверстиями 8, выполненными по окружности. При вращении диска 7 отверстия 8 последовательно проходят между фотодиодом 10 и фотоприемником 11, что создает ряд электрических импульсов, используемых в модуле управления калибровкой 15, параллельно с сигналами с датчика положения ротора 4, для точной остановки калибровочной платформы 1 в горизонтальном положении.
Предлагаемый трехкоординатный акселерометр повышает точность и достоверность измерений за счет проведения динамической калибровки акселерометров на разных частотах и автоматического учета изменения параметров акселерометров, выявленных с помощью калибровки. Трехкоординатный акселерометр позволяет вести сейсмические наблюдения в системах оповещения о сейсмической опасности в районах расположения ответственных объектов для уменьшения ущерба от экологической катастрофы. Он может также использоваться для измерения уровня вибрационных воздействий на объектах и как наклономер. Трехкоординатный акселерометр может быть установлен на фундаментах, непосредственно на конструкциях исследуемых объектов, в скважинах и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический датчик ускорений | 2017 |
|
RU2654977C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И ПОВОРОТНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184979C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| ПОВОРОТНАЯ УСТАНОВКА | 2004 |
|
RU2267749C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СКВАЖИННЫЙ ТРЕХКОМПОНЕНТНЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2488849C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения ускорений, вызываемых колебаниями основания, на котором установлен трехкоординатный акселерометр. Технический результат - повышение точности измерений. Для достижения данного результата акселерометр содержит калибровочную платформу 1, три однокоординатных датчика ускорений 2, электромотор 3 с датчиком положения ротора 4 и редуктором 5, диск 7 с отверстиями 8, оптоэлектронный блок 9 с фотодиодом 10 и фотоприемником 11. Диск 7 расположен между фотодиодом 10 и фотоприемником 11 так, чтобы отверстия диска при его вращении проходили между фотодиодом 10 и фотоприемником 11. Блок 12 задания угловых колебаний калибровочной платформы 1 соединен с диском 7 и выполнен в виде двух рычагов 13 и 14, один из которых одним концом шарнирно соединен с диском 7, а другим - шарнирно связан со вторым рычагом 14. Другой конец второго рычага 14 жестко закреплен на калибровочной платформе 1. Модуль управления калибровкой 15 имеет три входа и два выхода. Два однокоординатных датчика 2 ускорений с горизонтальными осями чувствительности расположены по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы 1, а третий - на оси колебаний калибровочной платформы 1. 3 ил.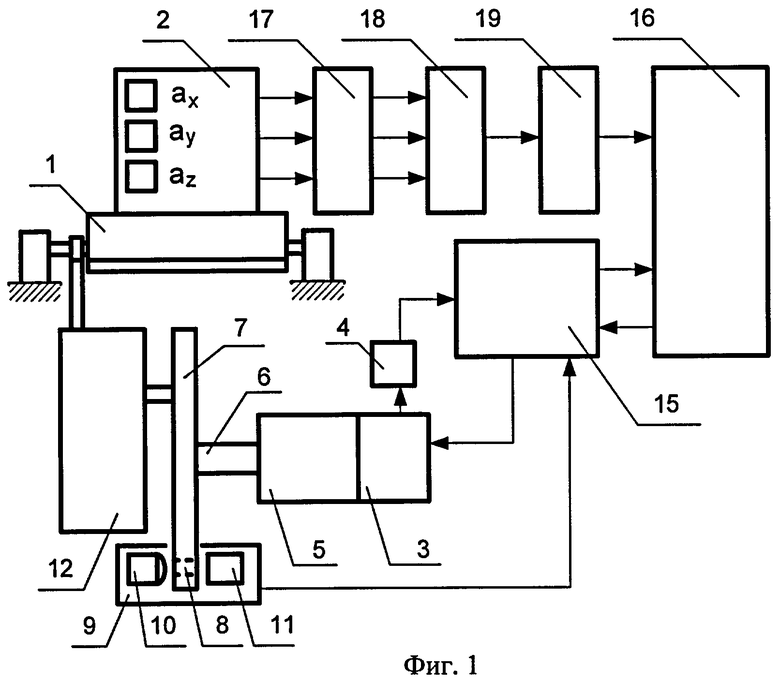
Трехкоординатный акселерометр, включающий калибровочную платформу, установленную с возможностью колебаний вокруг горизонтальной оси с заданной частотой, три однокоординатных датчика ускорений, расположенных на калибровочной платформе по трем взаимно ортогональным направлениям таким образом, чтобы их оси чувствительности были взаимно ортогональны и не совпадали с осью колебаний калибровочной платформы, электромотор с датчиком положения ротора и редуктором, на выходном вале которого установлен диск с отверстиями, выполненными по одной окружности, блок задания угловых колебаний калибровочной платформы, соединенный с электромотором и выполненный в виде двух рычагов, один из которых одним концом шарнирно соединен с диском, а другим шарнирно связан со вторым рычагом, другой конец второго рычага жестко закреплен на калибровочной платформе, оптоэлектронный блок с фотодиодом и фотоприемником, блок управления, регистрации и обработки результатов измерений и калибровки, модуль управления калибровкой, первый вход которого соединен с блоком управления, регистрации и обработки результатов измерений и калибровки, второй - с оптоэлектронным блоком, а третий - с выходом датчика положения ротора, один выход - с электромотором, другой выход - с блоком управления, регистрации и обработки результатов измерений и калибровки, частотные фильтры, входы которых соединены с датчиками ускорений, блок аналого-цифрового преобразователя, входы которого соединены с выходами частотных фильтров, контроллер, вход которого соединен с выходом блока аналого-цифрового преобразователя, а выход - с входом блока управления, регистрации и обработки результатов измерений и калибровки, при этом диск расположен между фотодиодом и фотоприемником так, чтобы отверстия диска при его вращении проходили между фотодиодом и фотоприемником, а два однокоординатных датчика ускорений с горизонтальными осями чувствительности расположены по одну сторону и на равных расстояниях от оси колебаний калибровочной платформы, а третий - на оси колебаний калибровочной платформы.
| ПОВОРОТНАЯ УСТАНОВКА | 2004 |
|
RU2267749C1 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И ПОВОРОТНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184979C1 |
| DE 19844911 A, 20.04.2000 | |||
| US 5274576 A, 28.12.1993. | |||

