Изобретения относятся к измерительной технике и предназначены для обеспечения контроля метрологических характеристик средств измерения параметров движения и ориентации объектов в пространстве.
Известно устройство для градуировки измерителей параметров движения, содержащее средство воспроизведения параметров движения в виде привода с вертикальной осью вращения с закрепленной на его валу платформой для размещения градуируемого измерителя, в котором задатчик параметров движения выполнен в виде диска со спиралевидным профилем рабочей поверхности (патент РФ № 1483383, кл. G 01 Р 21/00, 1986 г.).
Это устройство обладает невысокими функциональными возможностями и ограниченным диапазоном контроля метрологических характеристик измерителя.
Известен способ определения параметров прецизионных акселерометров, в котором его устанавливают на вертикальное основание, поворачивают основание вокруг горизонтальной оси на заданные углы от начального положения, затем акселерометр разворачивают вокруг оси чувствительности на основании на угол 180°, при этом вычисляют по его выходным сигналам отдельно погрешности базовых установочных элементов акселерометра и угловую деформацию основания (патент РФ № 2117950, кл. G 01 P 21/00, 1994 г.).
Указанный способ обладает невысокой точностью в связи с неоднократными переустановками акселерометра на плоскости основания и сложен при использовании для реальной конструкции преобразователя.
Известен способ определения угловых координат измерительной оси акселерометра для настройки и калибровки акселерометров и приборов, содержащих акселерометры, в котором производят первый и второй развороты акселерометра из начального положения вокруг осей, расположенных в плоскости горизонта на заданные углы, причем угловые координаты относительно ортогонального базиса определяют из приведенных в описании соотношений (патент РФ № 2164693, кл. G 01 Р 21/00, 1999 г.)
Указанный способ обладает невысокими фукциональными возможностями и не является универсальным для приборов разного типа, содержащих акселерометры.
Для всех указанных выше способов и устройств испытаний приборов, содержащих акселерометры, общим недостатаком является то, что в силу изменяющихся условий эксплуатации такие приборы нуждаются в периодической поверке и калибровке с целью определения их метрологических параметров, например таких, как масштабный коэффициент и значение нулевого отсчета. Для этого приборы снимаются с мест их установки, переносятся в измерительную лабораторию, где на специальном оборудовании поверяются. Недостатком этой операции является трудность повторного позиционирования акселерометров в месте их установки. Требуемая идентичность их повторного позиционирования иногда может достигать нескольких угловых секунд, что представляет сложную техническую задачу.
Известны способ электрического возбуждения резонансных колебаний пьезоэлектрического акселерометра и устройство для его осуществления (патент № 2150708, кл. G 01 P 21/00, 1999 г.), а также способ дистанционного периодического контроля коэффициента преобразования пьезоэлектрического акселерометра (патент № 2176396, кл. G 01 Р 21/00, 2000 г.), которые позволяют повысить точность измерения вибраций при длительной эксплуатации акселерометра без возможности временного демонтажа его с объекта измерения.
Однако указанные технические решения имеют ограниченную область применения по типу преобразователя и невысокие метрологические возможности.
Наиболее близкими техническими решениями с точки зрения обеспечения универсальности их применения для различных типов преобразователей, содержащих акселерометры и приближения испытательных режимов к эксплуатационным, являются способ проверки работоспособности акселерометра и реализующее способ устройство, в которых совмещается режим контроля с рабочим режимом акселерометра, при этом поверяемый акселерометр установлен на вибрирующем основании, а электронная схема обработки сигнала акселерометра разделяет рабочие, поверочные и эталонные сигналы и по результатам их сравнения судят об исправности акселерометра (патент РФ № 2078346, кл. G 01 Р 21/00, 1990 г.).
Недостатком известных способа и устройства является узкий диапазон функциональных возможностей дистанционного контроля преобразователей с акселерометрами, относительная сложность и неоперативность получения результатов контроля и, как результат, уменьшение надежности и точности измерений преобразователя.
Техническим результатом предлагаемых изобретений является устранение указанного недостатка, а также недостатков указанных выше технических решений и обеспечение расширения функциональных возможностей и автоматизации процесса проверки и калибровки акселерометров и повышение надежности и точности измерений пребразователя.
Сущность изобретений заключается в том, что указанный технический результат достигают для способа дистанционной калибровки акселерометра в составе измерительного преобразователя тем, что для калибровки акселерометра используют калибровочный узел в составе измерительного преобразователя, а саму калибровку акселерометра производят периодически в месте установки измерительного преобразователя путем изменения положения акселерометра в пространстве и его фиксации в четырех ориентациях, при этом измеряют выходные сигналы акселерометра, а калибровочные параметры рассчитывают по формулам:
где А0 - значение, соответствующее нулевому ускорению,
К - масштабный коэффициент акселерометра,
g - величина ускорения свободного падения в месте расположения измерительного преобразователя,
Δϕ - поправка, учитывающая погрешность начальной установки акселерометра в калибрующем узле,
а1, а2, а3 и а4 - выходные сигналы акселерометра в различных его положениях соответственно осью чувствительности вверх, вправо горизонтально, вниз и влево горизонтально.
Для достижения указанного выше технического результата в устройстве дистанционной калибровки акселерометра в составе измерительного преобразователя, содержащем акселерометр в составе измерительного преобразователя, включающего в себя корпус и электронную схему обработки сигнала акселерометра, в него дополнительно введен калибровочный узел в виде поворотной платформы, кулачка в виде кардиоиды, четырех арретиров, четырех пружин и четырех электромагнитов, причем акселерометр установлен на поворотной платформе, на оси вращения которой закреплен кулачок в виде кардиоиды, к боковым поверхностям которого подпружинены четыре арретира, связанные соответственно с сердечниками четырех электромагнитов, катушки которых жестко закреплены на корпусе.
Кроме того, электронная схема обработки сигнала акселерометра может содержать усилитель напряжения, аналого-цифровой преобразователь, микропроцессор и четыре усилителя тока, причем выход акселерометра через усилитель напряжения соединен с входом аналого-цифрового преобразователя, выход которого подключен к входу микропроцессора, первый выход микропроцессора является выходом устройства, а второй, третий, четвертый и пятый выходы микропроцессора соединены через четыре усилителя тока соответственно с четырьмя обмотками электромагнитов.
На фиг.1 представлена структурная схема устройства.
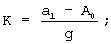
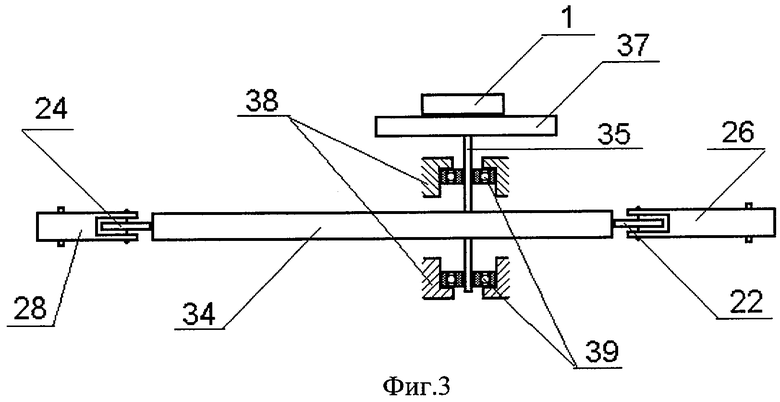
На фиг.2 и фиг.3 представлен пример конструктивного выполнения калибровочного узла заявляемого устройства.
На чертежах используются следующие обозначения позиций: 1 - калибруемый акселерометр, 2 - усилитель напряжения, 3 - аналого-цифровой преобразователь, 4 - схема управления (микропроцессор), 5 - первый выход микропроцессора, 6, 7, 8, 9 - соответственно второй, третий, четвертый и пятый выходы микропроцессора, 10, 11, 12 и 13 - усилители тока, 14, 15, 16 и 17 - электромагниты, 18, 19, 20 и 21 - механическая связь с поворотной платформой, на которой закреплен акселерометр, через арретиры и кулачок, 22, 23, 24 и 25 - ролики арретиров; 26, 27, 28 и 29 - коромысла арретиров; 30, 31, 32 и 33 - пружины арретиров; 34 - кулачок; 35 - ось кулачка и поворотной платформы; 36 - фиксирующий паз; 37 - поворотная платформа; 38 - корпус устройства; 39 - подшипник.
Устройство работает следующим образом.
В исходном состоянии ролик первого арретира (22) под действием пружины (30) прижимается к кулачку (34), который в таком положении оказывается жестко зафиксирован (зааретирован). При подаче определенной величины постоянного тока на каждую обмотку электромагнитов (14, 15 и 16) ролики арретиров (22, 23, и 24) отжимаются под действием магнитодвижущей силы электромагнитов и кулачок разаретируется.
Однако ролик арретира (25) под действием пружины (33) продолжает давить на боковую поверхность кулачка, выполненного в виде кардиоиды. Так как боковая поверхность кулачка (34) представляет собой фрагмент спирали Архимеда (или близкой к ней кривой), то давление ролика арретира (25) вызывает вращающий момент. Поскольку ось кулачка (35) установлена в подшипниках, этот момент вызывает разворот кулачка "против часовой стрелки" до тех пор, пока арретир (25) не попадет в фиксирующий паз (36). После этого микропроцессор (4) снимает управляющие сигналы со своих выходов (8, 9 и 10) и таким образом выключает ток, протекающий через обмотки электромагнитов (14, 15 и 16). Разворот кулачка, поворотной платформы и акселерометра на 90 угловых градусов завершен.
Чтобы развернуть кулачок (34) еще на 90 угловых градусов, достаточно оставить прижатым ролик арретира (24) и отжать с помощью электромагнитов ролики остальных арретиров (22, 23 и 25).
Для разворота кулачка (34) на 90 угловых градусов в обратном направлении достаточно оставить прижатым арретир (25) и отжать посредством электромагнитов ролики арретиров (22, 23 и 25).
Изменение угла разворота оси чувствительности акселерометра приводит к изменению величины проекции на нее ускорения земного тяготения и, соответственно, к изменению выходного сигнала, который через усилитель напряжения (2) и аналого-цифровой преобразователь (3) поступает на вход схемы управления (микропроцессора) (4).
Поверка акселерометров осуществляется путем контроля соответствия выходных сигналов акселерометров при изменении ими своего угла относительно вектора ускорения силы тяжести Земли. При ориентации акселерометра осью чувствительности вверх сигнал на выходе акселерометра А↑ должен быть равен:
A↑=A0+K·g,
где А0 - смещение нуля акселерометра;
К - масштабный коэффициент акселерометра;
g - ускорение свободного падения.
При ориентации акселерометра осью чувствительности вниз сигнал акселерометра А↓ должен быть равен:
A↓=A0-K·g,
Если сигналы А↑ и А↓ соответствуют своим нормированным значениям, то акселерометр считается исправным.
Изменяя положение акселерометра в составе преобразователя и фиксируя его выходные сигналы при ориентации в четырех направлениях, рассчитывают калибровочные параметры по формулам:
где А0 - значение, соответствующее нулевому ускорению,
К - масштабный коэффициент акселерометра,
g - величина ускорения свободного падения в месте расположения измерительного преобразователя,
Δϕ - поправка, учитывающая погрешность начальной установки акселерометра в калибрующем узле,
а1, а2, a3 и а4 - выходные сигналы акселерометра в различных его положениях соответственно осью чувствительности вверх, вправо горизонтально, вниз и влево горизонтально.
Положительный эффект достигается тем, что заявляемое устройство не требует демонтажа для его поверки, а эта операция может периодически осуществляться на месте установки заявляемого устройства в течение всего срока его службы. Кроме того, заявляемое устройство допускает дистанционную поверку акселерометра и управление ею по проводам с удаленного места.
Таким образом, предлагаемые изобретения позволяют достичь технический результат, заключающийся в обеспечении расширения функциональных возможностей и автоматизации процесса проверки и калибровки акселерометров и повышения надежности и точности измерений преобразователей, в состав которых входят эти акселерометры.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ТЕСТИРОВАНИЯ БЛОКА АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2271015C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| ТРЕХКООРДИНАТНЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2376607C1 |
| СПОСОБ ИЗМЕРЕНИЯ УКЛОНОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2227899C1 |
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
Изобретение относится к измерительной технике и предназначено для обеспечения контроля метрологических характеристик средств измерения параметров движения и ориентации объектов в пространстве. Сущность изобретений заключается в том, что для способа дистанционной калибровки акселерометра в составе измерительного преобразователя для калибровки акселерометра используют калибровочный узел в составе измерительного преобразователя, а саму калибровку акселерометра производят периодически в месте установки измерительного преобразователя путем изменения положения акселерометра в пространстве и его фиксации в четырех ориентациях, при этом измеряют выходные сигналы акселерометра, а калибровочные параметры рассчитывают по соответствующим формулам. Способ реализуется в устройстве дистанционной калибровки акселерометра в составе измерительного преобразователя, включающего в себя корпус и электронную схему обработки сигнала акселерометра. В него дополнительно введен калибровочный узел в виде поворотной платформы, кулачка в виде кардиоиды, четырех арретиров, четырех пружин и четырех электромагнитов. Акселерометр установлен на поворотной платформе, на оси вращения которой закреплен кулачок в виде кардиоиды, к боковым поверхностям которого подпружинены четыре арретира, связанные соответственно с сердечниками четырех электромагнитов, катушки которых жестко закреплены на корпусе. Изобретение направлено на обеспечение возможности автоматизации процесса проверки и калибровки акселерометров и повышения надежности и точности измерений преобразователей, в состав которых входят эти акселерометры. 2 н. и 1 з.п. ф-лы, 3 ил.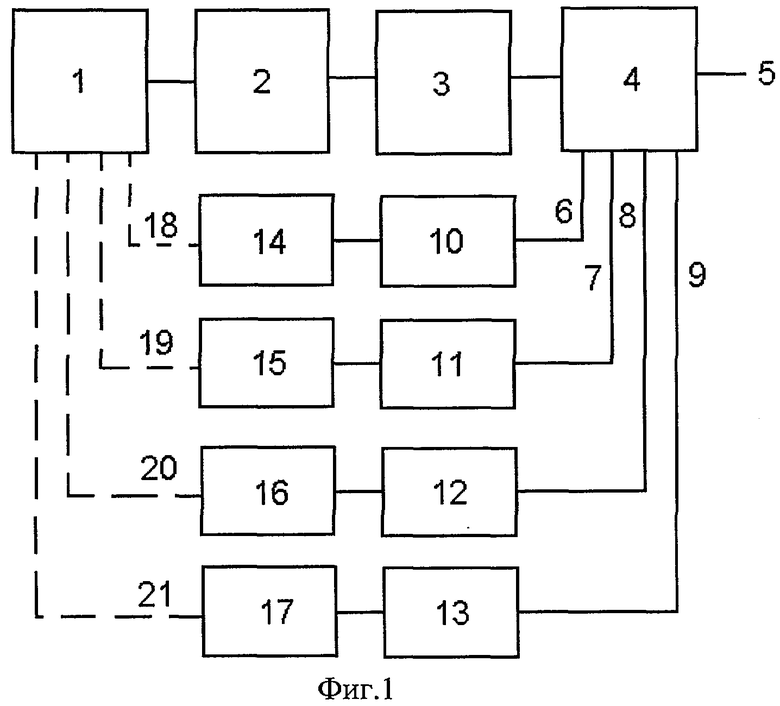
где А0 - значение, соответствующее нулевому ускорению,
К - масштабный коэффициент акселерометра,
g - величина ускорения свободного падения в месте расположения измерительного преобразователя,
Δϕ - поправка, учитывающая погрешность начальной установки акселерометра в калибрующем узле,
a1, а2, а3 и а4 - выходные сигналы акселерометра в различных его положениях соответственно осью чувствительности вверх, вправо горизонтально, вниз и влево горизонтально.
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ АКСЕЛЕРОМЕТРА | 1990 |
|
RU2078346C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ КОЛЕБАНИЙ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2150708C1 |
| СПОСОБ ДИСТАНЦИОННОГО ПЕРИОДИЧЕСКОГО КОНТРОЛЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2000 |
|
RU2176396C1 |
| Устройство для градуировки измерителей параметров движения | 1986 |
|
SU1483383A1 |
| DE 19844911 А, 20.04.2000 | |||
| US 5274576 A, 28.12.1993. | |||

