Изобретение относится к калибровочной и испытательной технике, а именно к метрологии и может быть использовано при калибровке различных типов акселерометров и сейсмоприемников в области низких и сверхнизких частот.
Известно устройство для градуировки пьезоэлектрического акселерометра на низких частотах [1], сущность которого заключается в том, что акселерометр поворачивают в гравитационном поле земли при помощи специальной платформы и измеряют, выходной сигнал акселерометра. При этом на поворотной платформе предварительно установлен акселерометр, ось чувствительности которого направлена в вертикальной плоскости под любым углом к горизонтальной оси. Затем совмещают центр масс инерционного элемента акселерометра с осью вращения, меняя частоту вращения, поворачивают акселерометр на угол более 360° на каждой частоте, определяют максимальные значения выходных сигналов на каждой из частот, по которым определяют коэффициенты преобразования для построения амплитудно-частотной характеристики акселерометра в области низких частот. Поворотная установка содержит основание, на котором установлена подвижная платформа, которая состоит из вала и насадки, имеющей горизонтальную площадку для крепления испытуемого акселерометра, при этом насадка установлена с возможностью перемещения в плоскости, перпендикулярной оси вала, на торцевых поверхностях вала нанесена координатная сетка для фиксации их взаимного положения в плоскости сопряжения.
Недостатком известного способа градуировки является низкая стабильность частоты вращения подвижной платформы, а так же высокий уровень виброшумов создаваемый контактными опорами подвеса вала (например, шарикоподшипниковыми) и невозможность задания произвольной величины входного ускорения. Так же известно [4, с. 176], что пьезоэлектрические и электродинамические акселерометры нечувствительны к статическим воздействиям.
Известен способ градуировки пьезоэлектрических акселерометров путем поворота в гравитационном поле земли [2] заключающийся в измерении пикового напряжения на выходе калибруемого пьезоэлектрического акселерометра в момент прохождения его положения равновесия во время раскачивания на физическом маятнике, для этого установка содержит пиковый детектор напряжения оптический датчик и т.д.
Способ не позволяет получить амплитудно-частотную характеристику (АЧХ), так как с уменьшением частоты уменьшается и амплитуда входного ускорения воздействующего на пьезоэлектрический акселерометр, при этом возрастает погрешность измерения и отсутствие контроля выставки установочной плоскости калибруемого датчика создает дополнительную погрешность так как ось чувствительности не совмещается с вектором действующего ускорения, при этом требуется сложная математическая обработка сигнала учитывающая действие центробежных сил и явление переходного процесса.
Известно устройство для калибровки акселерометров в поле земного тяготения [3] состоящее из поворотной платформы, ось которой закреплена в горизонтальной плоскости при этом поворот оси чувствительности S акселерометра на угол φ вокруг горизонтальной оси, составляющей некоторый постоянный угол α с осью чувствительности, равносилен воздействию на акселерометр калибровочного сигнала, соответствующего ускорению X=g·cos(φ)·sin(α), где g – ускорение силы тяжести.
К недостаткам известного устройства можно отнести отсутствие учета влияния нестабильности частоты на выходной сигнал калибруемого акселерометра, а так же низкая конструктивная проработанность для заявленного устройства.
Наиболее близким по технической сущности и достигаемому эффекту к заявленному изобретению является вращательный стенд для калибровки сейсмометров [4, с. 176] состоящий из станины, в которой на полуосях может свободно вращаться подвижная часть, состоящая из наружного кольца и внутреннего диска. В отверстие диска размещена площадка, на которой закрепляется испытуемый сейсмометр, так что центр тяжести его инерционной массы всегда лежит на оси вращения подвижной части стенда. Диск с испытуемым сейсмометром может поворачиваться относительно кольца на заданный угол, измеряемый по нанесенной на торце нониусной шкале. На кольце расположены клеммы для подключения выходных концов кабеля сейсмометра. Клеммы через систему колец контактора щеток токоснимателя соединены с расположенными на станине клеммами, служащими для подключения измерительной аппаратуры.
К недостатку известного устройства можно отнести высокий уровень собственных шумов создаваемых контактным типом опор подвижной части стенда и вибрациями электропривода, а также низкую стабильность частоты вращения подвижной части и невозможность получения фазочастотной характеристики испытуемого прибора.
Техническая проблема настоящего изобретения заключается в необходимости повышения точности калибровки пьезоэлектрических и электродинамических акселерометров и сейсмоприемников, а также автоматизация процесса калибровки.
Техническим результатом является упрощение процесса калибровки, уменьшение времени оператора и повышение информативности.
Поставленная проблема решается тем, что во вращательном стенде для калибровки сейсмометров, содержащем станину, в которой на двух полуосях может свободно вращаться подвижная часть, состоящая из наружного кольца и подвижной платформы, согласно заявляемому техническому решению содержится бесконтактный электропривод и балансировочные груза, блок электроники состоящий из внутреннего источника питания, понижающего преобразователя, микроконтроллера, датчика влажности и температуры, информационного дисплея и цифрового входа для подключения к компьютеру. При этом отсутствует вторая степень свободы подвижной платформы, однако на подвижной платформе установлен блок микромеханических датчиков для контроля ее углового положения и контроля углового положения двух полуосей, на которых закреплена подвижная платформа относительно плоскости горизонта.
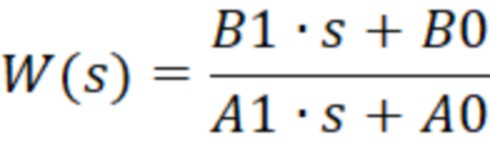
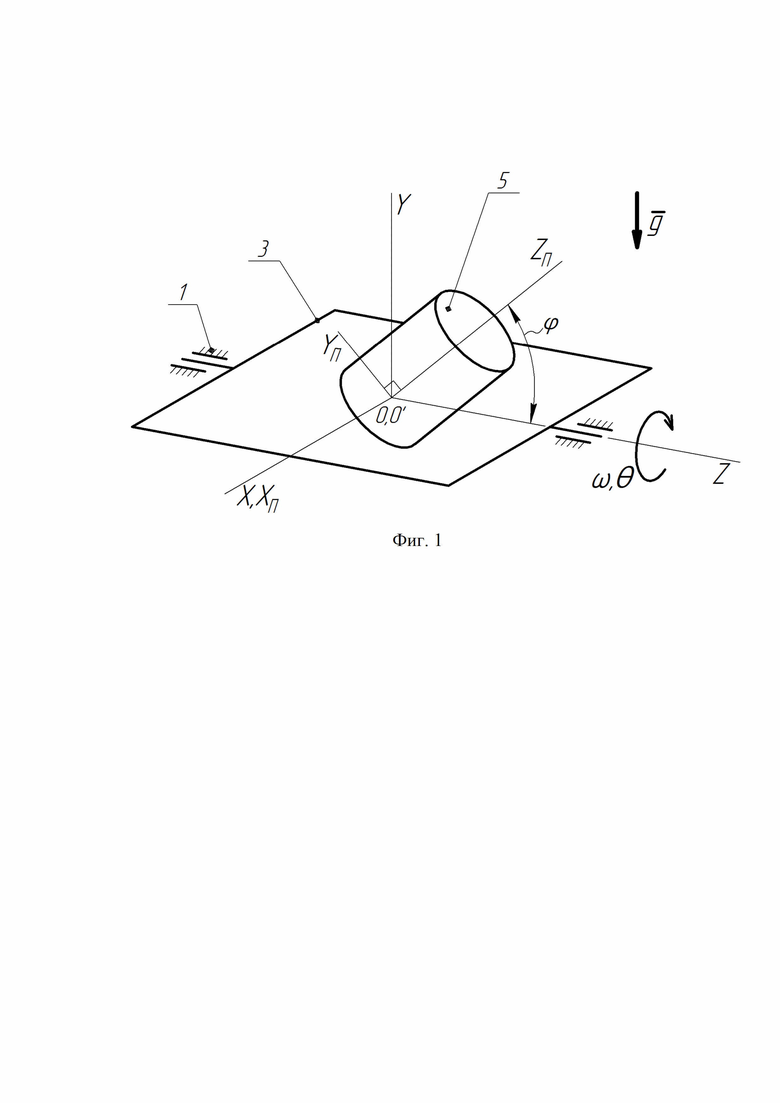
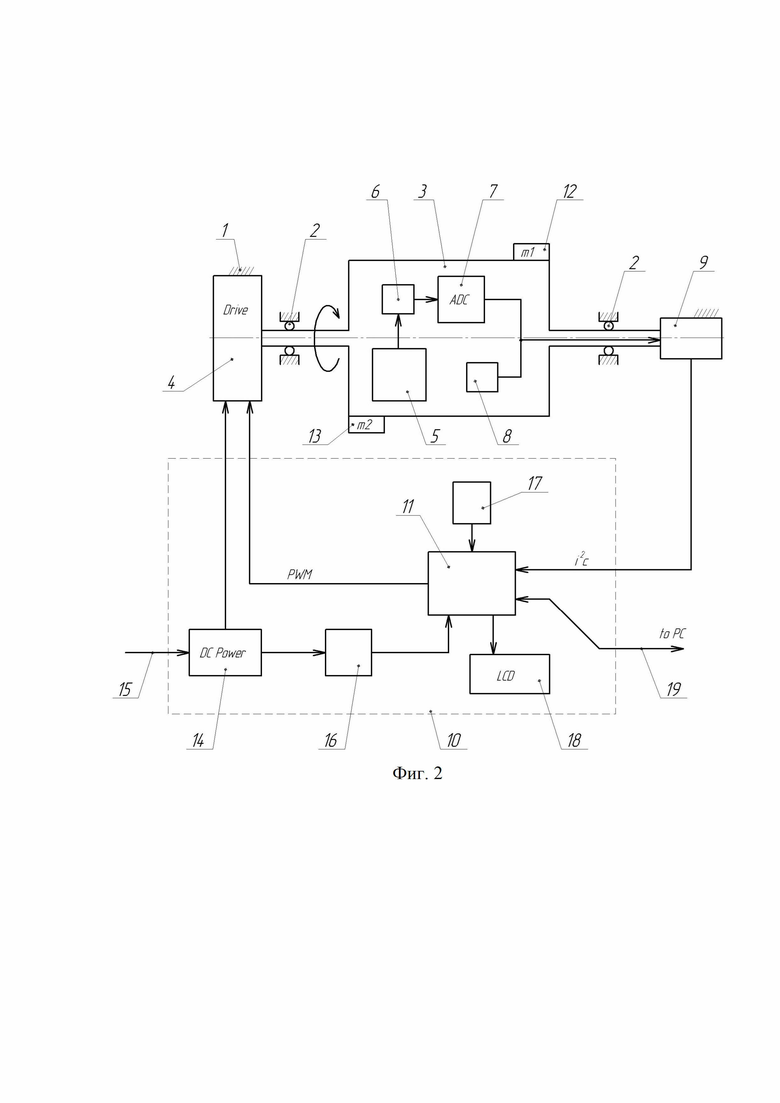
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена кинематическая схема калибровочного стенда, а на фиг. 2 представлена структурная схема калибровочного стенда, на фиг.3 представлена АЧХ калибруемого датчика полученная в ходе расчетов и подтверждающаяся результатами, полученными в эксперименте.
Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников (фиг. 2) состоит из корпуса 1, выполненного в виде массивной станины, на котором посредством шарикоподшипниковой опоры 2 и двух полуосей закреплена подвижная вращающаяся платформа 3, которая приводится в движение бесконтактным электроприводом 4. На подвижной вращающейся части располагают исследуемый датчик 5, подключенный к аналого-цифровому преобразователю 7 через сопротивление нагрузки 6, также на подвижной вращающейся платформе 3 расположены балансировочные грузы 12 (m1) для грубой балансировки и 13 (m2) для точной балансировки. На подвижной вращающейся платформе для контроля стабильности вращения расположен блок микромеханических гироскопов и акселерометров 8. Аналого-цифровой преобразователь 7 и блок микромеханических гироскопов и акселерометров 8 подключены параллельно к цифровой шине данных i2c и соединены с цифровым входом микроконтроллера 11, электрические сигналы с подвижной платформы 3 проходят через узел скользящих токоподводов 9. Помимо механической части низкочастотный стенд содержит блок электроники 10, содержащий внутренний источник питания 14, понижающий преобразователь 16, микроконтроллер 11, датчик температуры и влажности 17, информационный дисплей 18 и цифровой вход для подключения к компьютеру 19. Питание осуществляется от сети 220 В переменным напряжением частотой 50 Гц и подводится к входу питания 15 внутреннего источника питания 14. Программное обеспечение, находящееся в памяти микроконтроллера 11, способно выполнять ряд команд, поступающих на цифровой вход 19, позволяющих осуществлять управление калибровочным стендом и производить различные операции калибровки и испытаний датчика.
Работа калибровочного стенда осуществляется следующим образом. После установки исследуемого датчика 5 на подвижную вращающуюся платформу 3, производится ее статическая балансировка, грубая при помощи подбора массы m1 балансировочного груза 12, и точная при помощи подбора массы m2 балансировочного груза 13. После подключения исследуемого датчика 5 и подачи питания 15 на внутренний источник питания 14 калибровочный стенд готов к работе и ожидает команд управления от компьютера через цифровой вход 19.
При получении микроконтроллером 11 на цифровой вход 19 команды означающей начало работы производится проверка работы аналого-цифрового преобразователя 7, блока микромеханических гироскопов и акселерометров 8 и датчика температуры и влажности 17. Затем микроконтроллер 11 подает напряжение широтно-импульсной модуляции на вход бесконтактного электропривода 4. При этом скорость вращения вала бесконтактного электропривода 4 пропорциональна длительности управляющих импульсов напряжение широтно-импульсной модуляции. При вращении вала бесконтактного электропривода 4 приводится в движение подвижная вращающаяся платформа 3, на которой установлен исследуемый датчик 5 и блок микромеханических гироскопов и акселерометров 8, за счет изменения проекции вектора ускорения силы тяжести на ось чувствительности исследуемого датчика 5 на его выходе появляется электрический сигнал пропорциональный величине действующего ускорения, но при этом зависящий от частоты вращения подвижной вращающаяся платформы 3. Электрический сигнал полученный на выходе исследуемого датчика 5 поступает на сопротивление нагрузки 6 и измеряется аналого-цифровым преобразователем 7, после чего цифровое значение выходного напряжения исследуемого датчика 5 считывается микроконтроллером 11, обрабатывается заложенным в памяти микроконтроллера алгоритмом и выводится на информационный дисплей 18, а также отправляется на компьютер посредством цифрового входа 19.
Микроконтроллер 11 выполняет функцию стабилизации вращения подвижной вращающаяся платформы 3 в заданном диапазоне. Для этого микроконтроллер 11 получает информацию с блока микромеханических гироскопов и акселерометров 8 о действующей угловой скорости вокруг оси вращения подвижной вращающейся платформы 3, при помощи заложенного в памяти алгоритма производит компенсацию длительности управляющих импульсов напряжения широтно-импульсной модуляции пропорциональной скорости вращения вала бесконтактного электропривода 4.
Компенсация величины задания входного ускорения на исследуемый датчик 5 производится алгоритмически. Для этого микроконтроллер получает информацию о действующем ускорении с блока микромеханических гироскопов и акселерометров 8, преобразует полученные значения девствующего ускорения силы тяжести по заложенному в памяти алгоритму, и определяет угловое положение оси вращения подвижной платформы 3, после чего рассчитывается коэффициент компенсирующий погрешность выставки корпуса 1.
Способ калибровки вращением в поле силы тяжести в основном применяется для датчиков с чувствительным элементом генераторного типа [4, с. 176]. В этом случае происходит поворот оси чувствительности датчика фиг. 1, при этом проекция вектора ускорения силы тяжести изменяется по гармоническому закону, создавая переменное гармоническое воздействие на чувствительный элемент датчика. Так же при повороте оси чувствительности датчика возникают центробежные силы и в выходном сигнале датчиков чувствительных к постоянному ускорению (например, силы тяжести) появляется постоянная составляющая.
Амплитудное значение воздействия калибровочного сигнала согласно фиг. 1 численно равно проекции ускорения силы тяжести на ось чувствительности прибора и составляет:
где g - ускорение силы тяжести; φ - угол наклона оси чувствительности прибора.
При равномерном вращении испытуемого прибора с постоянной угловой скоростью  входное ускорение будет изменяется по следующему гармоническому закону:
входное ускорение будет изменяется по следующему гармоническому закону:
где входное ускорение, действующее вдоль оси чувствительности.
Запишем выражение (2) с учетом того погрешности выставки оси вращения подвижной платформы 3 и нестабильности частоты вращения:
где Δφ - погрешность выставки оси вращения платформы;
Δθ - погрешность частоты вращения платформы.
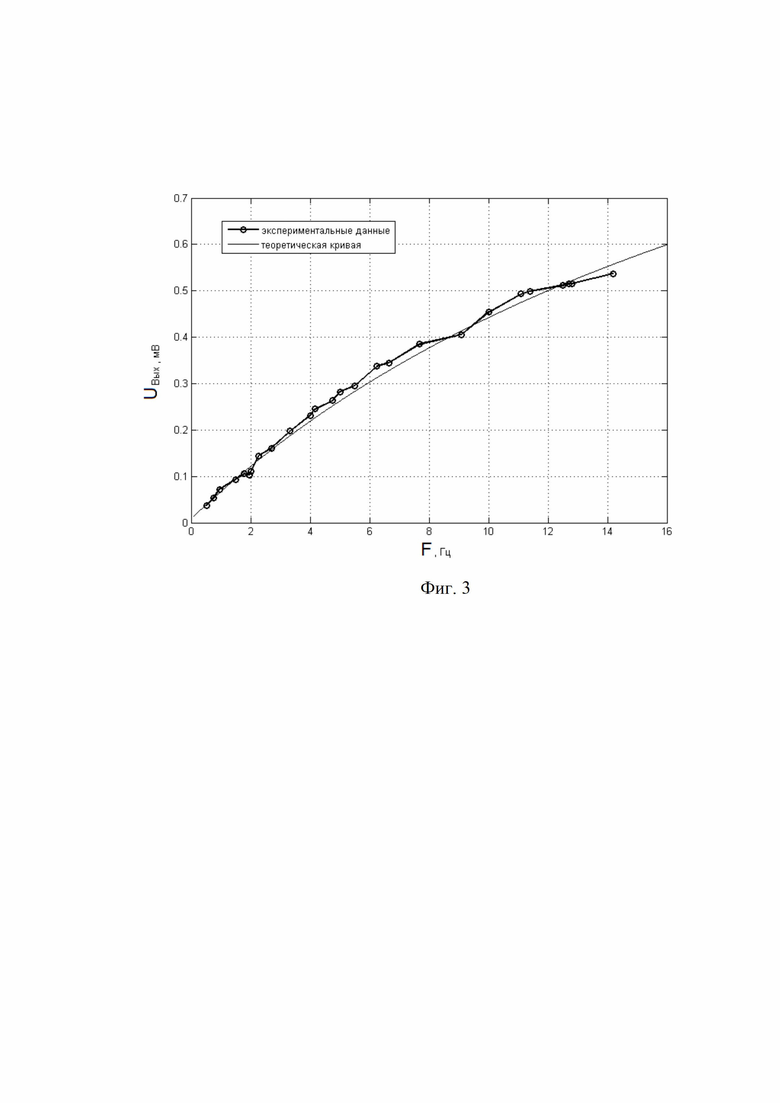
таким образом плавно изменяя частоту вращения подвижной платформы в сторону ее увеличения и при этом измеряя выходной сигнал датчика становится возможным получение его АЧХ в области низких частот. АЧХ, полученная в ходе эксперимента, приведена на фиг. 3, также на фиг. 3 приведена АЧХ, полученная при математическом моделировании датчика по его передаточной функции (4).
где A1 = B1 = ZN·RВХ·Cдат;
B0 = ZN + Cдат;
A0 = ZN;
ZN - сопротивление нагрузки;
CДАТ - емкость датчика;
RВХ - входное сопротивление АЦП.
Заменяя оператор дифференцирования s=jω, где ω=2πf - циклическая частота, где f - частота вращения подвижной платформы 3, подставляя полученное в (4) получаем:
Полученное соотношение (5) легко реализовать аппаратно в программном обеспечении микроконтроллера и использовать для оценки правильности процесса калибровки непосредственно при работе калибровочного стенда. Учитывать ФЧХ в области низких частот нет необходимости так как значительные фазовые изменения сигнала происходят в области резонанса датчика, а это частоты порядка 10 кГц (из паспорта на датчик) в то время как калибровочный стенд работает на частотах до 20 Гц.
В качестве примера практической реализации настоящего изобретения, было разработано техническое решение, которое представленное на фиг. 2, в котором с целью повышения стабильности частоты вращения подвижной платформы содержит бесконтактный электропривод и балансировочные груза, с целью автоматизации процесса управления, измерения и обработки данных содержит блок электроники состоящий из внутреннего источника питания, понижающего преобразователя, микроконтроллера, датчика влажности и температуры, информационного дисплея и цифрового входа для подключения к компьютеру, однако с целью упрощения конструкции отсутствует вторая степень свободы подвижной платформы, однако на подвижной платформе установлен блок микромеханических датчиков для контроля ее углового положения и контроля углового положения двух полуосей на которых закреплена подвижная платформа относительно плоскости горизонта.
В качестве примера рассмотрим влияние точности выставки, которое обеспечивается при помощи блока микромеханических гироскопов и акселерометров 8. Разрешающая способность используемых в макете акселерометров в режиме работы инклинометра составляет 30 угловых секунд, из чего можно определить величину входного ускорения:
При этом, погрешность задания входного ускорения составляет Δ=1·10-7 м/с2. В то время как точность визуальной выставки при помощи шкалы нониусов используемой в прототипе составляет порядка 0.5 градуса, при этом погрешность задания входного ускорения составляет:
Из результатов расчетных оценок видно, что автоматическая выставка при помощи блока микромеханических гироскопов и акселерометров 8 позволяет достичь более высокой точности задания входного ускорения.
Технико-экономическая эффективность практического использования предлагаемого устройства заключается в следующем:
1. Уменьшение времени затрачиваемого оператором на калибровку и испытания за счет автоматизации процесса измерения и обработки данных при помощи компьютера;
2. Низкая стоимость по сравнению с аналогичными электродинамическими, механическими и гидравлическими стендами достигается за счет использования унифицированной элементной базы и простоты конструкции;
3. Высокая точность и стабильность входного воздействия, за счет использования бесконтактного электропривода достигается низкий уровень шумов по сравнению с прототипом;
4. Высокая информативность стенда позволяет использовать его при исследованиях и разработке новых акселерометров и сейсмоприемников.
Литература
1. Патент РФ № 2519833, 20.06.2014.
2. Оптико-электронный аппарат // Патент SU 1295344 A1. 1987. Бюл. № 9. /В.Н Авдонин, В.П. Козик, В.Н. Кочедыков.
3. О.К. Абрамов Устройство для калибровки акселерометров в поле земного тяготения. Вестник РГРТУ. № 4 (выпуск 26). Рязань, 2008 г.
4. Фремд В.М. Инструментальные средства и методы регистрации сильных землетрясений. – М.: Наука, 1978. – 176 с.
5. Иориш Ю.И. Виброметрия. Измерение вибрации и ударов. Общая теория, методы и приборы (2-е изд.). - М.:ГНТИМСЛ,1963, - 771 с.
6. Гросул А.Б., Некрасов В.Н., Сергеев С.В. Применение метода динамических наклонов в поле силы тяжести для градуировки вертикальных сейсмоприемников акселерометрического типа // Сейсмические приборы. Вып. 21. М.: Наука, 1990. – С. 175 с.
7. Бесекерский В.А. Теория систем автоматического управления: учеб. пособие. – СПб.: Профессия, 2007 г.
8. Чен К., Джиблин П., Ирвинг А. Matlab в математических исследованиях. – М.: Мир, 2001. – 346 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однокоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2815852C1 |
| Двухкоординатный низкочастотный стенд для исследования и калибровки сейсмических датчиков | 2023 |
|
RU2808155C1 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| Установка для демонстрации микромеханического авиагоризонта | 2021 |
|
RU2758807C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| Инерциальный измерительный прибор летательного аппарата на микромеханических датчиках и способ повышения его точности | 2015 |
|
RU2615018C1 |
Изобретение относится к калибровочной и испытательной технике. Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников дополнительно содержит бесконтактный электропривод, приводящий в движение подвижную вращающуюся платформу, балансировочные грузы, установленные на подвижную вращающуюся платформу, блок электроники, состоящий из внутреннего источника питания, понижающего преобразователя, микроконтроллера, датчика влажности и температуры, информационного дисплея и цифрового входа для подключения к компьютеру, также на подвижной платформе установлен блок микромеханических датчиков для контроля ее углового положения и контроля углового положения двух полуосей, на которых закреплена подвижная платформа, относительно плоскости горизонта. Технический результат – упрощение процесса калибровки, уменьшение времени калибровки оператором, повышение информативности стенда. 3 ил.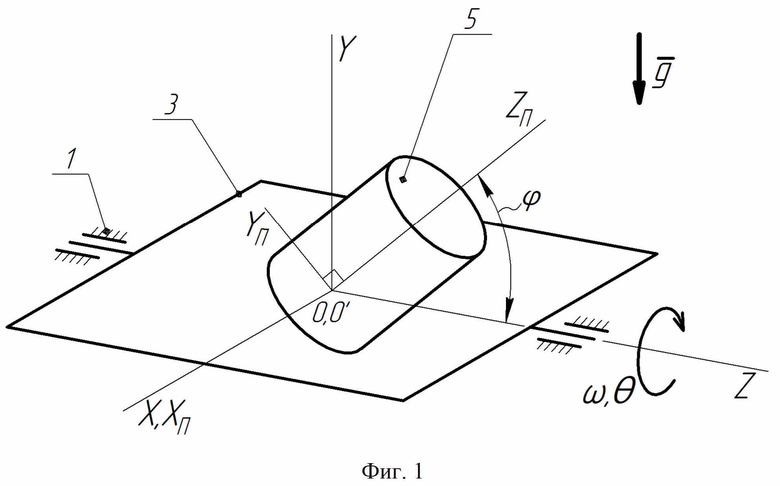
Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников, содержащий станину, в которой на двух полуосях свободно вращается подвижная часть, состоящая из подвижной платформы, отличающийся тем, что содержит бесконтактный электропривод, приводящий в движение подвижную вращающуюся платформу, балансировочные грузы, установленные на подвижную вращающуюся платформу, блок электроники, состоящий из внутреннего источника питания, понижающего преобразователя, микроконтроллера, датчика влажности и температуры, информационного дисплея и цифрового входа для подключения к компьютеру, также на подвижной платформе установлен блок микромеханических датчиков для контроля ее углового положения и контроля углового положения двух полуосей, на которых закреплена подвижная платформа, относительно плоскости горизонта.
| Стенд для испытания изделий наВОздЕйСТВиЕ пОСТОяННыХ и НизКО-чАСТОТНыХ уСКОРЕНий | 1978 |
|
SU813155A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| Стенд линейных гармонических ускорений | 1975 |
|
SU607147A1 |
| CN 106248198 A, 21.12.2016. | |||

