Эта заявка испрашивает приоритет предварительной заявки США № 60/666,138, которая была зарегистрирована 28 марта 2005 г.
Это раскрытие в целом относится к связи. Более конкретно, раскрытие относится к определению местоположения беспроводным способом и к сигналам в беспроводной системе определения местоположения.
Уровень техники
Во многих приложениях может быть полезным иметь возможность определять местоположение подвижного устройства. Определение местоположения может быть полезным для приложений навигации, слежения и ориентации. Постоянное повышение эффективности портативной электронной аппаратуры, в частности успехи в производительности процессоров, позволяют добавлять функциональные возможности определения местоположения в множество устройств.
Например, для оператора мобильной телекоммуникационной системы, такой как сотовая телекоммуникационная система, может быть желательным иметь возможность определять местоположение мобильного телефонного аппарата во время связи с базовой приемопередающей станцией (BTS) системы. Системному оператору могут быть желательными функциональные возможности определения местоположения, например, чтобы удовлетворять распоряжению Федеральной комиссии по связи США (FCC) Е911 об определении местоположения в экстренных случаях.
Подвижные устройства могут реализовывать один или более способов определения местоположения в зависимости от способов передачи сигналов определения местоположения, используемых в системе определения местоположения. Например, подвижное устройство может использовать способ, основанный на времени прихода (ТОА), разности времени прихода (TDOA), усовершенствованный способ трилатерации прямой линии связи (AFTL) или некоторый другой способ определения местоположения. Примеры систем определения местоположения включают в себя системы, которые основаны на глобальной системе позиционирования (GPS), системы, которые дополняют систему GPS наземными маяками, такими как гибридные системы определения местоположения, и системы определения местоположения с помощью наземных маяков. В одном примере подвижное устройство может определять свое местоположение с помощью определения измерений абсолютной задержки относительно двух наземных маяков или измерений относительной задержки, по меньшей мере, относительно трех наземных маяков.
Большинство наземных систем определения расстояния используют псевдошумовой (PN) код в конфигурации прямого расширения спектра последовательностью. Каждый маяк определения местоположения может передавать PN код, который идентифицирует маяк. В системе связи с прямой линией связи с временным мультиплексированием маяки определения местоположения могут быть синхронизированными, чтобы передавать соответствующий PN код определения местоположения по существу одновременно.
Подвижное устройство может идентифицировать конкретный источник частично с помощью корреляции принятого PN расширенного сигнала с локально генерированной копией. Однако устройство определения местоположения подвижного устройства в наземной системе может принимать значительно отличающиеся мощности сигналов. Одна проблема, с которой сталкиваются подвижные устройства, связана с приемом значительно отличающихся мощностей сигналов.
В определенных ситуациях подвижное устройство может определять сигнал определения местоположения только из одного маяка, так как сигнал этого маяка является настолько сильным, что создает помехи сигналам из других маяков. Отношение сигнал-шум сигналов определения местоположения из окружающих маяков является слишком малым для подвижного устройства, чтобы извлекать полезные данные измерения расстояния. Подвижное устройство может испытывать эту проблему, когда оно находится относительно близко к одному маяку и относительно далеко от окружающих маяков. Этот эффект обычно упоминают как проблему “близко-далеко”.
Следовательно, желательно иметь способ, систему и устройство передачи сигналов определения местоположения, которые предусматривают определение местоположения с высокой эффективностью в множестве состояний, включая состояние “близко-далеко”, и при этом являются практичными для реализации.
Сущность изобретения
Раскрыты способ и устройство, предназначенные для генерирования и использования опорного сигнала определения местоположения, который дает возможность приемнику принимать сигналы определения местоположения из генераторов относительно слабых сигналов, при наличии источника сильного сигнала. Опорные сигналы определения местоположения из множества источников могут быть синхронизированы таким образом, чтобы они происходили в пределах запланированного интервала времени системы связи с прямой линией связи с временным мультиплексированием с временным разделением. Интервал времени определения местоположения может быть запланирован таким образом, чтобы он возникал периодически, или может быть запланирован как результат запроса.
В течение запланированного интервала времени каждый источник сигнала может конфигурировать передачу, которая включает в себя адрес управления доступом к среде, который соответствует значению, зарезервированному для сигналов определения местоположения. Каждый источник сигнала также может конфигурировать передачу таким образом, чтобы она включала в себя опорный сигнал определения местоположения, который соответствует источнику сигнала. Каждому источнику сигнала может быть назначена часть подынтервала интервала времени определения местоположения. Сигналы определения местоположения из каждого из источников сигналов упорядочиваются таким образом, чтобы они возникали в назначенном подынтервале в запланированном интервале времени. В течение назначенного подынтервала никакой соседний источник сигнала не передает свой соответствующий сигнал определения местоположения.
Раскрытие включает в себя способ распределения сигналов определения местоположения в системе связи с временным мультиплексированием. Способ включает в себя этапы, на которых синхронизируют множество источников сигналов определения местоположения с началом отсчета времени, определяют временные характеристики интервала времени определения местоположения, имеющего множество подынтервалов, конфигурируют интервал времени определения местоположения с идентификатором, указывающим, что интервал времени определения местоположения включает в себя информацию определения местоположения, конфигурируют в первом источнике сигнала первый подынтервал с первым сигналом определения местоположения, соответствующим первому источнику сигнала, из множества источников сигналов определения местоположения, и передают с помощью первого источника сигнала интервал времени определения местоположения, имеющий сигнал определения местоположения.
Раскрытие также включает в себя способ распределения сигналов определения местоположения в системе связи с временным мультиплексированием, который включает в себя этапы, на которых генерируют в каждом из множества источников сигналов соответствующий интервал времени определения местоположения, имеющий множество подынтервалов, причем каждый из соответствующих интервалов времени определения местоположения имеет сигнал определения местоположения, соответствующий источнику сигнала в подынтервале, назначенном источнику сигнала, и передают в предварительно определенном интервале времени из каждого из множества источников сигналов соответствующий интервал времени определения местоположения.
Раскрытие также включает в себя способ определения местоположения в системе связи с временным мультиплексированием. Способ включает в себя этапы, на которых принимают интервал времени, имеющий идентификатор, указывающий, что интервал времени включает в себя информацию определения местоположения, определяют из первого подынтервала в интервале времени первый сигнал определения местоположения, соответствующий первому источнику сигнала определения местоположения, определяют из второго подынтервала в интервале времени второй сигнал определения местоположения, соответствующий второму источнику сигнала определения местоположения, и определяют временные характеристики, относящиеся к местоположению, на основании первого и второго сигналов определения местоположения.
Раскрытие также включает в себя устройство, предназначенное для передачи сигналов определения местоположения в системе связи с временным мультиплексированием, включающее в себя модуль данных измерения расстояния, сконфигурированный с возможностью генерирования сигнала определения местоположения, процессор интервала времени, сконфигурированный с возможностью генерирования интервала времени определения местоположения, имеющего поле адреса и множество подынтервалов, причем, по меньшей мере, первый подынтервал назначен сигналу определения местоположения и, по меньшей мере, второй подынтервал отличается от первого подынтервала, имеющего нулевые данные, и поле адреса сконфигурировано для адреса, зарезервированного для интервалов времени определения местоположения, и РЧ приемопередатчик, предназначенный для передачи интервала времени определения местоположения в предварительно определенное время.
Раскрытие также включает в себя устройство, предназначенное для извлечения сигналов определения местоположения из сигнала связи с временным мультиплексированием, включающее в себя РЧ-блок, предназначенный для приема составного интервала времени определения местоположения, имеющего информацию подынтервалов, передаваемую множеством различных источников сигналов, декодер адреса, предназначенный для декодирования адреса в составном интервале времени определения местоположения, и модуль временных характеристик, выполненный с возможностью извлечения множества сигналов определения местоположения из составного интервала времени определения местоположения, причем каждый сигнал определения местоположения, извлеченный из подынтервала, соответствует каждому из множества различных источников сигналов.
Краткое описание чертежей
Признаки, задачи и преимущества предоставленных вариантов осуществления поясняются в подробном описании, приведенном ниже, иллюстрируемом чертежами, на которых одинаковые элементы имеют одинаковые ссылочные позиции.
Фиг. 1 - упрощенная функциональная блок-схема варианта осуществления системы определения местоположения.
Фиг. 2А-2В - блок-схемы вариантов осуществления структур данных интервала времени.
Фиг. 3 - упрощенная функциональная блок-схема варианта осуществления источника сигнала определения местоположения.
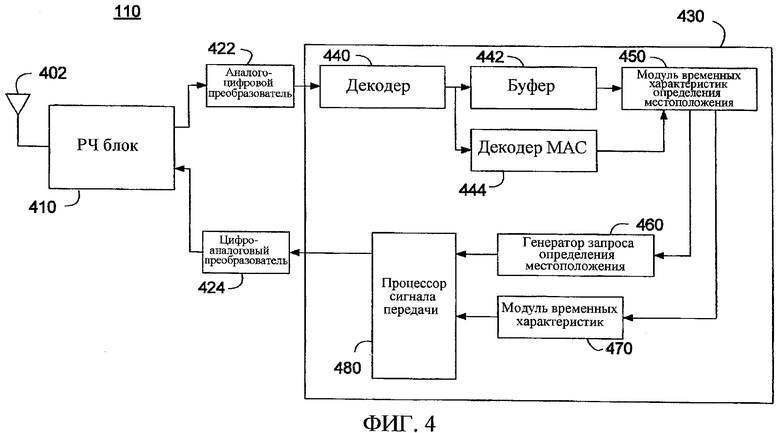
Фиг. 4 - упрощенная функциональная блок-схема варианта осуществления пользовательского терминала, имеющего функциональные возможности определения местоположения.
Фиг. 5 - упрощенная блок-схема последовательности этапов варианта осуществления способа генерирования интервала времени данных определения местоположения.
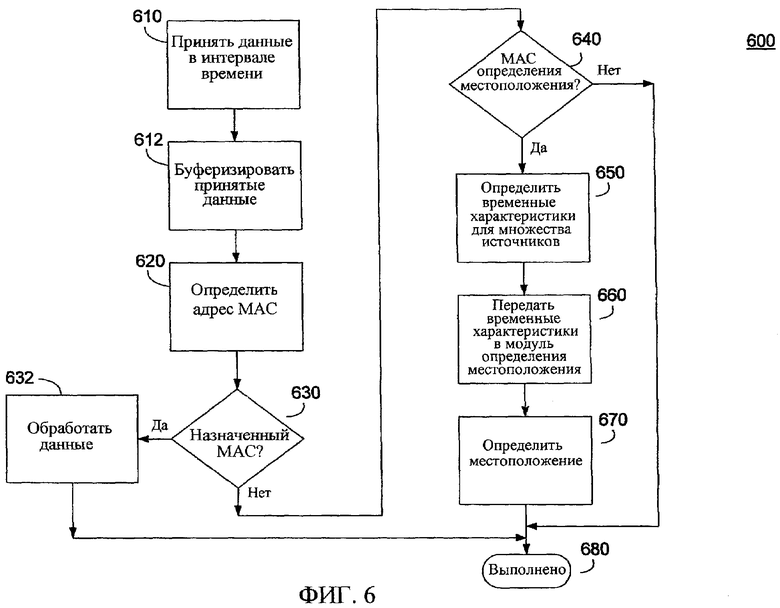
Фиг. 6 - упрощенная блок-схема последовательности этапов варианта осуществления способа использования интервала времени данных определения местоположения.
Подробное описание вариантов осуществления
Система определения местоположения, которая включает в себя наземные маяки, может фактически исключить эффекты проблемы “близко-далеко” с помощью реализации структуры передачи сигналов определения местоположения, которая дает возможность приемнику принимать и измерять сигналы определения местоположения в относительно незашумленной среде. Чтобы минимизировать шум и взаимные помехи, вносимые окружающими маяками, каждый маяк может быть сконфигурирован с возможностью передачи своего соответствующего сигнала определения местоположения в момент времени, в который никакой другой маяк не передает сигнал определения местоположения или сигнал данных.
В системе связи с асинхронно планируемой прямой линией связи с временным мультиплексированием интервал времени может быть запланирован как интервал времени определения местоположения. Каждый источник сигнала может конфигурировать интервал времени способом, определенным для обычного интервала данных. Однако интервал времени определения местоположения может быть разделен на множество подынтервалов, которые расположены там, где обычно находится поле данных интервала времени данных. Каждый источник сигнала может быть назначен в соответствующий один из подынтервалов и может передавать свой соответствующий сигнал определения местоположения в течение назначенного подынтервала. Идентификатор пакета, такой как адрес МАС, включенный в интервал времени определения местоположения, может идентифицировать информацию, содержащуюся в интервале времени, как информацию определения местоположения. Интервал времени определения местоположения может быть запланирован периодически или может планироваться в ответ на запрос информации определения местоположения.
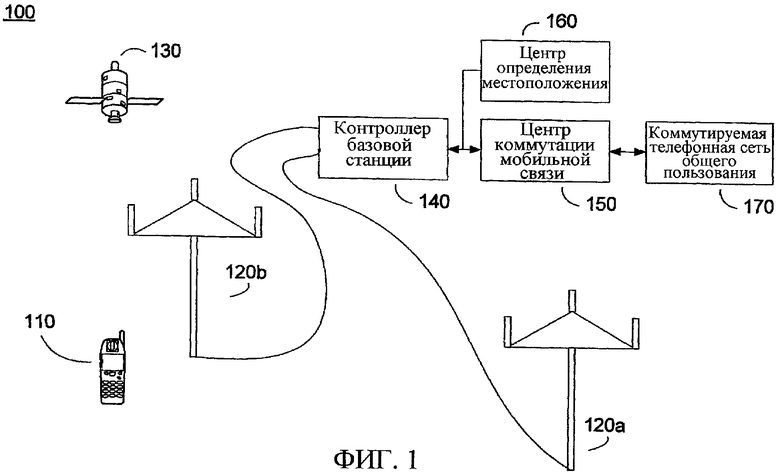
Фиг. 1 - упрощенная блок-схема варианта осуществления системы 100 определения местоположения, которая включает в себя наземные маяки. Система 100 определения местоположения может включать в себя один или более наземных элементов, которые могут взаимодействовать с пользовательским терминалом 110. Пользовательский терминал 110, например, может быть беспроводным телефоном, сконфигурированным с возможностью работы в соответствии с одним или более стандартов связи. Один или более стандартов связи могут включать в себя, например, GSM, WCDMA и CDMA2000, включающие в себя 1x EV-DO, 1X EV-DV и CDMA2000 3x. Пользовательский терминал 110 может быть портативным устройством, подвижным устройством, стационарным устройством. Пользовательский терминал также может быть упомянут как подвижное устройство, подвижный терминал, подвижная станция, пользовательская аппаратура, портативное устройство, телефон и тому подобное.
Пользовательский терминал 110 обычно взаимодействует с одной или более базовыми станциями 120а или 120b, на чертеже изображенными как разделенные на секторы сотовые вышки. Пользовательский терминал 110 обычно будет взаимодействовать с базовой станцией, например 120b, которая обеспечивает наибольшую интенсивность сигнала в приемнике в пользовательском терминале 110. Две базовые станции 120а и 120b и один пользовательский терминал изображены на фиг. 1 для удобства и пояснения. Обычно система имеет множество базовых станций и может поддерживать более одного пользовательского терминала.
Пользовательский терминал 110 может определять свое местоположение частично на основании сигналов определения местоположения, принимаемых из одного или более источников сигналов. Источники сигналов могут включать в себя один или более спутников 130, которые могут быть частью спутниковой системы определения местоположения, такой как глобальная система позиционирования (GPS). Источники сигналов также могут включать в себя одну или более базовых станций 120а или 120b.
Каждая из базовых станций 120а и 120b может быть соединена с контроллером базовых станций (BSC) 140, который маршрутизирует сигналы связи в соответствующие базовые станции 120а и 120b и из них. BSC 140 может быть соединен с центром коммутации мобильной связи (MSC) 150, который может быть сконфигурирован с возможностью работать в качестве интерфейса между пользовательским терминалом 110 и коммутируемой телефонной сетью общего пользования (PSTN) 170. Следовательно, MSC 150 также соединен с PSTN 170. MSC 150 также может быть сконфигурирован с возможностью координации межсистемных передач обслуживания с другими системами связи.
Центр определения местоположения (PLC) 160 также может быть соединен с BSC 140. PLC 160 может быть сконфигурирован, например, с возможностью запоминания информации определения местоположения, такой как местоположение каждой из базовых станций 120а и 120b, в системе 100 определения местоположения. В одном варианте осуществления PLC 160 может быть сконфигурирован с возможностью предоставления информации в пользовательский терминал 110, такой, что пользовательский терминал 110 может определять свое местоположение частично на основании псевдорасстояний до множества источников сигналов, где псевдорасстояния могут быть относительными величинами времени поступления. В другом варианте осуществления PLC 160 может быть сконфигурирован с возможностью определения местоположения пользовательского терминала 110 на основании информации о псевдорасстоянии, предоставленной с помощью пользовательского терминала 110. В последнем варианте осуществления сервер сети (не изображен) в PLC 160 может выполнять определение местоположения, для того чтобы разгрузить обработку из пользовательского терминала 110.
PLC 160 может быть сконфигурирован с возможностью управления базовыми станциями 120а и 120b через BSC 140, чтобы генерировать сигналы определения местоположения. В других вариантах осуществления базовые станции 120а и 120b могут быть сконфигурированы с возможностью периодического генерирования сигналов определения местоположения.
Базовые станции 120а и 120b в системе связи с прямой линией связи с временным мультиплексированием могут быть сконфигурированы с возможностью генерирования сигналов определения местоположения способом, который дает возможность пользовательскому терминалу 110 принимать сигнал определения местоположения с относительно большим SNR из удаленной базовой станции, например 120а, даже при наличии источника сильного сигнала определения местоположения, например 120b.
Базовые станции 120а и 120b могут быть сконфигурированы таким образом, чтобы быть синхронизированными с общим системным временем, и могут быть сконфигурированы с возможностью передачи сигнала определения местоположения в предварительно определенном интервале времени. Каждая базовая станция, например 120b, может быть сконфигурирована с возможностью передачи в интервале времени идентификатора, который может быть использован, чтобы идентифицировать базовую станцию, являющуюся источником сигнала. Например, идентификатор может быть пачкой пилот-сигналов, возникающей в предварительно определенный момент времени в течение интервала времени.
Каждый интервал времени также может быть сконфигурирован с возможностью включения в него поля управления доступом к среде (МАС), которое включает в себя адрес МАС устройства назначения. Например, если базовая станция 120b передает пакет данных, который предназначен для пользовательского терминала 110, интервал времени включает в себя адрес МАС пользовательского терминала 110. Пользовательский терминал 110 может определять, является ли он предполагаемым получателем принятого пакета, с помощью проверки адреса МАС. Пользовательский терминал 110 обычно может игнорировать пакеты данных, сопровождающие интервалы времени, которые не имеют адреса МАС, соответствующего адресу МАС пользовательского терминала 110.
Интервал времени определения местоположения может включать в себя адрес МАС, который зарезервирован для данных определения местоположения. Базовые станции 120а и 120b используют зарезервированный адрес МАС при передаче сигналов определения местоположения. Пользовательский терминал может быть сконфигурирован с возможностью проверки принятых пакетов относительно зарезервированного адреса МАС при попытке определения местоположения.
Интервал времени определения местоположения может быть дополнительно разделен на множество подынтервалов, и каждая базовая станция 120а и 120b может быть назначена, по меньшей мере, в один из подынтервалов, по меньшей мере, в одном из интервалов времени определения местоположения. Базовым станциям 120а и 120b в системе 100 определения местоположения могут быть назначены подынтервалы в соответствии со схемой повторного использования, которая гарантирует, что один и тот же подынтервал не назначен базовым станциям, имеющим перекрывающиеся зоны обслуживания. В одном варианте осуществления каждая базовая станция 120а и 120b назначена в конкретный подынтервал в интервале времени определения местоположения. В другом варианте осуществления каждый сектор базовой станции 120а и 120b может быть назначен в различный подынтервал в интервале времени определения местоположения.
Каждая базовая станция, например 120а, может быть сконфигурирована с возможностью передачи соответствующего сигнала определения местоположения в течение назначенного подынтервала. Базовые станции 120а и 120b не передают в течение подынтервала, для которого они не назначены. Тогда пользовательский терминал 110 эффективно принимает сигналы определения местоположения из одной базовой станции 120а и 120b или сектора базовой станции в течение любого подынтервала интервала времени определения местоположения. Так как только одна базовая станция 120а или 120b или сектор базовой станции передает в течение любого конкретного подынтервала, пользовательский терминал 110 может восстанавливать сигнал определения местоположения по существу в среде, свободной от шумов, где отсутствие шума относится к шуму и помехам, генерируемым окружающими базовыми станциями.
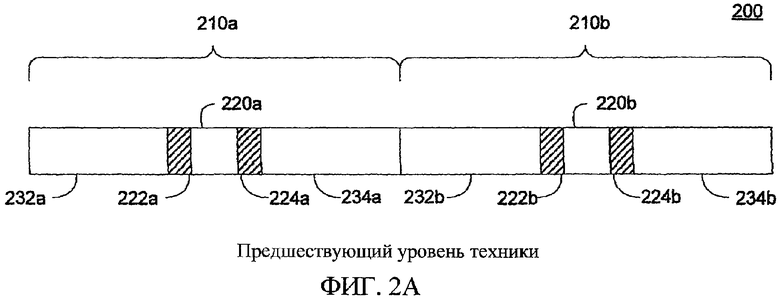
Фиг. 2А - блок-схема варианта осуществления существующей структуры 200 интервала времени в системе связи с прямой линией связи с временным мультиплексированием. Структура 200 интервала времени, например, может быть использована системой связи, изображенной на фиг. 1. Структура 200 интервала времени может соответствовать интервалу времени в системе связи CDMA 2000 1xEV-DO. Существующая структура 200 интервала времени использована, чтобы проиллюстрировать, как передача сигналов определения местоположения может быть сконфигурирована, чтобы быть обратно совместимой с традиционными устройствами, работающими в системе связи. Способы и устройства определения местоположения не ограничены реализацией в системе CDMA 2000 1xEV-DO, а могут быть реализованы фактически в любом типе системы с прямой линией связи с разделением времени.
Существующая структура 200 интервала времени включает в себя интервал времени, который разделен на два половинных интервала 210а и 210b времени. В одном варианте осуществления каждый половинный интервал 210а и 210b времени может быть сконфигурирован независимо от другого. В другом варианте осуществления половинные интервалы 210а и 210b времени могут содержать одинаковую информацию.
Каждый половинный интервал времени, например 210а, включает в себя поле 220а пачки пилот-сигнала, которое используется передающей базовой станцией, чтобы передавать пилот-сигнал, соответствующий базовой станции. Пользовательский терминал может использовать пачки пилот-сигнала, например, чтобы первоначально синхронизироваться с базовой станцией и определять идентификационный код базовой станции.
Каждый половинный интервал времени, например 210а, включает в себя поля МАС перед 222а и после 224а поля 220а пачки пилот-сигнала. Поля 222а и 224а МАС могут быть использованы, чтобы идентифицировать прием данных в половинном интервале времени 220а. В одном варианте осуществления первое поле 222а МАС и второе поле 224 МАС содержат одинаковый адрес МАС. В другом варианте осуществления первое и второе поля 222а и 224а МАС могут содержать разные адреса. В другом варианте осуществления адрес МАС может содержаться в комбинации первого поля 222а МАС и второго поля 224а МАС.
В каждом половинном интервале времени, например 210а, существуют части 232а и 234а данных. Части 232а и 234а данных могут быть использованы, чтобы передавать данные в устройство назначения, идентифицированное с помощью соответствующего адреса МАС, такое как пользовательский терминал.
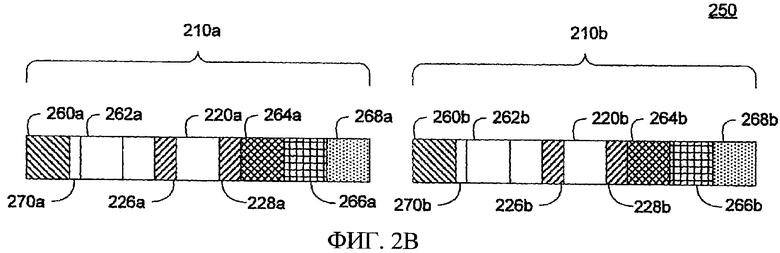
Фиг. 2В - блок-схема варианта осуществления структуры 250 данных интервала времени определения местоположения в системе связи с временным мультиплексированием, сконфигурированной для информации определения местоположения. Структура 250 данных интервала времени определения местоположения проиллюстрирована в перспективе для приемника, такого как пользовательский терминал. Различия между представлениями в перспективе для приемника и передатчика описаны ниже.
Структура 250 данных интервала времени определения местоположения включает в себя два половинных интервала 210а и 210b времени. На блок-схеме фиг. 2В два половинных интервала 210а и 210b времени изображены отдельно для целей пояснения. Рассматривается первый половинный интервал 210а времени. Однако структура второго половинного интервала 210b времени может быть подобна структуре первого половинного интервала 210а времени.
Первый половинный интервал 210а времени включает в себя поле 220а пачки пилот-сигнала и первое и второе поля 226а и 228а МАС. Синхронизация поля 220а пачки пилот-сигнала и первого и второго полей 226а и 228а МАС может быть той же самой, что была использована в существующей структуре 200 данных интервала времени, обсужденной выше в связи с фиг. 2А.
В половинном интервале 210а времени определения местоположения адрес МАС не соответствует адресу МАС пользовательского терминала получателя. Вместо этого каждый источник сигнала определения местоположения, такой как базовая станция, вставляет зарезервированный адрес МАС в первое и второе поля 226а и 228а МАС. Зарезервированный адрес МАС соответствует адресу МАС, который не соответствует никакому конкретному приемнику в зоне обслуживания, поддерживаемой базовыми станциями, и может не соответствовать никакому адресу МАС, который может быть назначен любому пользовательскому терминалу во всей системе.
В одном варианте осуществления зарезервированный адрес МАС является статическим адресом МАС, который конфигурирован для всей системы. Каждый пользовательский терминал или вообще приемник, который сконфигурирован с возможностью обработки сигналов определения местоположения, может быть сконфигурирован с возможностью мониторинга принятого адреса МАС. В другом варианте осуществления адрес МАС может быть динамическим и может быть назначен в ответ на запрос сигналов определения местоположения. Базовым станциям в местоположении, обслуживающем запрашивающий пользовательский терминал может быть назначен адрес МАС, который не соответствует адресу МАС любого пользовательского терминала в их зонах обслуживания. Зарезервированный адрес МАС может быть передан в пользовательский терминал, например, с использованием дополнительного канала, и пользовательский терминал может осуществлять мониторинг назначенного адреса МАС.
Части данных половинных интервалов 210а и 210b времени интервала времени определения местоположения могут быть дополнительно разделены на подынтервалы. Каждый из подынтервалов может быть назначен базовой станции, и базовая станция может передавать свой сигнал определения местоположения в назначенном подынтервале.
Пользовательский терминал осуществляет мониторинг интервала времени относительно зарезервированного адреса МАС и обрабатывает весь принятый интервал времени на основании адреса МАС. Однако интервал времени включает в себя информацию множества подынтервалов, передаваемую с помощью множества базовых станций. Каждая базовая станция передает только свой сигнал определения местоположения в своем назначенном подынтервале, и приемник в пользовательском терминале принимает составной сигнал, который может включать в себя передачи множества подынтервалов, соответствующие множествам базовых станций. Структура 250 данных интервала времени определения местоположения фиг. 2В изображает пять отдельных подынтервалов в каждом половинном интервале 210а и 210b времени. Однако структура 250 данных интервала времени определения местоположения не ограничена наличием пяти подынтервалов, а может реализовывать любое количество подынтервалов на основании длительности интервала времени и длительности подынтервалов и защитных периодов.
Подынтервалы могут быть сконфигурированы таким образом, что они являются непосредственно смежными друг другу или могут иметь некоторое время между смежными подынтервалами. Например, первый подынтервал 260а может быть сконфигурирован таким образом, что находится на начальном крае первого половинного интервала 210а времени. Второй подынтервал 262а может находиться после первого подынтервала 260а. Между первым подынтервалом 260а и вторым подынтервалом 262а может быть защитный период 270а.
Защитный период 270а может быть использован, чтобы минимизировать вероятность того, что первый сигнал определения местоположения, переданный первой базовой станцией, назначенной в первый подынтервал 260а, будет перекрывать второй сигнал определения местоположения, переданный второй базовой станцией, назначенной во второй подынтервал 262а.
Временное перекрытие смежных сигналов определения местоположения может быть обусловлено разностями задержек распространения, которые обычно обусловлены расстоянием от приемника до источника сигнала. Следовательно, если пользовательский терминал физически находится близко ко второй базовой станции и относительно далеко от первой базовой станции, сигнал определения местоположения из первой базовой станции, например, назначенной в первый подынтервал 260а, будет задержан относительно сигнала определения местоположения, переданного второй базовой станцией во втором подынтервале 262а. Если нет защитного периода 270а, пользовательский терминал будет воспринимать некоторое перекрытие двух сигналов определения местоположения.
Длительность защитного периода 270а может быть предварительно определена и может быть основана на самом дальнем расстоянии между двумя базовыми станциями, для которых можно ожидать, что один пользовательский терминал будет принимать сигналы определения местоположения. В качестве альтернативы, длительность защитного периода 270а может быть определена на основании номинального расстояния базовой станции и допустимой длительности перекрытия.
В других вариантах осуществления защитный период 270а может быть исключен, и подынтервалы могут быть непосредственно смежными друг другу. Вариант осуществления, в котором отсутствует защитный период между смежными подынтервалами, изображен в подынтервалах после пачки 220а пилот-сигнала и полей 226а и 228а МАС первого половинного интервала 210а времени.
Третий подынтервал 264а расположен непосредственно после второго поля 228а МАС. Четвертый подынтервал 266а непосредственно следует за третьим подынтервалом 264а. Подобным образом пятый подынтервал 268а непосредственно следует за четвертым подынтервалом 266а.
Защитный подынтервал 270а может быть исключен, например, когда считается, что перекрытие информации смежного подынтервала будет несущественным, чтобы вызывать ухудшение сигналов определения местоположения. Перекрытие будет недостаточным для ухудшения, если длительность перекрытия минимальна, если передача сигналов определения местоположения не чувствительна к временному перекрытию, или при комбинации таких факторов.
Сигналы определения местоположения, передаваемые каждой базовой станцией, могут быть любым из различных сигналов определения местоположения. Как описано ранее, сигналы определения местоположения могут быть PN кодами или другими кодами с предпочтительными характеристиками корреляции, и каждой базовой станции может быть назначен один из множества PN кодов или смещений PN кода.
В одном варианте осуществления сигналы определения местоположения, передаваемые каждой базовой станцией, соответствуют пачке пилот-сигнала для этой базовой станции. В других вариантах осуществления сигналы определения местоположения могут быть выбраны из PN кодов, которые имеют предпочтительные характеристики взаимной корреляции. А именно, PN код, назначенный первой базовой станции, будет иметь малую взаимную корреляцию с PN кодом, назначенным второй базовой станции. Использование сигналов определения местоположения, имеющих малую взаимную корреляцию, может быть использовано, чтобы минимизировать или исключить потребность в защитных периодах 270а.
Следовательно, базовая станция передает сигнал определения местоположения в своем назначенном подынтервале, когда никакая другая базовая станция в окружающей области не осуществляет передачи. Для пользовательского терминала составной интервал времени определения местоположения представляется как множество сигналов определения местоположения, передаваемых в соответствующем множестве подынтервалов. Информация в каждом подынтервале может быть принята по существу в среде, свободной от шумов, так как только одна базовая станция передает в течение каждого подынтервала.
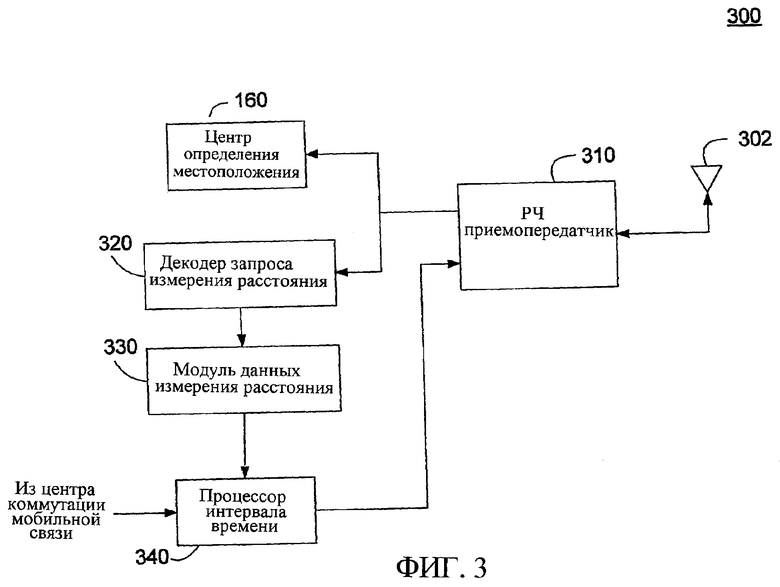
Фиг. 3 - упрощенная функциональная блок-схема варианта осуществления источника 300 сигнала определения местоположения. Источник 300 сигнала определения местоположения может включать в себя, например, базовую станцию системы фиг. 1 или может быть частью базовой станции в комбинации с некоторыми или всеми BSC 140 и PLC 160.
Источник 300 сигнала определения местоположения включает в себя РЧ приемопередатчик 310, соединенный с антенной 302. РЧ приемопередатчик 310 может быть сконфигурирован с возможностью приема сигналов измерения расстояния из пользовательских терминалов (не изображены) и может подавать их на PLC 160 для определения местоположения. В одном варианте осуществления РЧ приемопередатчик 310 также может принимать запрос передачи интервала времени определения местоположения. В таком варианте осуществления источник 300 сигнала определения местоположения может быть сконфигурирован с возможностью передачи интервалов времени определения местоположения в ответ на запросы из одного или более пользовательских терминалов. В другом варианте осуществления источник 300 сигнала определения местоположения может быть сконфигурирован с возможностью периодической передачи интервалов времени определения местоположения.
РЧ приемопередатчик 310 может подавать принятые запросы измерения расстояния в декодер 320 запроса измерения расстояния. В качестве альтернативы, PLC 160 или некоторый другой модуль (не изображен) может генерировать сигнал для модуля 320 запроса измерения расстояния, чтобы планировать передачу сигнала определения местоположения.
Модуль 320 запроса измерения расстояния может конфигурировать или иным образом управлять модулем 330 данных измерения расстояния, чтобы генерировать данные измерения расстояния, которые могут быть сигналом определения местоположения, который РЧ приемопередатчик 310 передает в течение назначенного подынтервала. В одном варианте осуществления сигнал определения местоположения соответствует пилот-сигналу для базовой станции. В другом варианте осуществления сигнал определения местоположения может быть PN кодом или некоторым другим сигналом определения местоположения. Модуль 330 данных измерения расстояния также может быть сконфигурирован с возможностью подачи зарезервированного адреса МАС, который используется в интервалах времени синхронизации определения местоположения.
Модуль 330 данных измерения расстояния может подавать сигнал определения расстояния и зарезервированный адрес МАС в процессор 340 интервала времени, который конфигурирует интервалы времени для передачи. Процессор 340 интервала времени может быть сконфигурирован с возможностью синхронизации временных характеристик интервалов времени с началом отсчета системного времени.
Процессор 340 интервала времени также может быть сконфигурирован с возможностью приема данных, которые должны быть переданы в различные пользовательские терминалы в диапазоне РЧ приемопередатчика 310. Процессор 340 интервала времени планирует интервал времени определения местоположения и конфигурирует интервал времени определения местоположения таким образом, чтобы он имел зарезервированный адрес МАС и пачку пилот-сигнала для соответствующей базовой станции. Процессор 340 интервала времени также может быть сконфигурирован с возможностью конфигурирования сигнала определения местоположения для назначенного подынтервала. Процессор 340 интервала времени подает сконфигурированные интервалы времени в РЧ приемопередатчик 310, чтобы передать в пользовательские терминалы через антенну 302.
Фиг. 4 - упрощенная функциональная блок-схема варианта осуществления пользовательского терминала 110, имеющего функциональные возможности определения местоположения. Пользовательский терминал, например, может быть пользовательским терминалом системы, изображенной на фиг. 1.
Пользовательский терминал 110 включает в себя антенну 402, соединенную с РЧ входным интерфейсом 410. РЧ входной интерфейс может быть приемопередатчиком, который сконфигурирован с возможностью преобразования с понижением частоты и обработки принятых сигналов, а также преобразования с повышением частоты и обработки сигналов основной полосы частот для передачи. РЧ входной интерфейс 410 может обрабатывать все принятые сигналы в рабочей полосе частот. Эти сигналы могут включать в себя данные, предназначенные для пользовательского терминала, данные, предназначенные для других пользовательских терминалов, а также информацию определения местоположения.
Аналого-цифровой преобразователь (AЦП) 422 может быть соединен для получения сигнала приема с выхода РЧ блока 410. AЦП 422 может подавать преобразованный в цифровой вид сигнал на вход процессора 430 основной полосы частот.
Выход AЦП 422 может быть соединен с декодером 440 в процессоре 430 основной полосы частот. Декодер 440 может быть сконфигурирован, например, с возможностью декодирования принятых кодированных символов и восстановления соответствующих битов. Декодер 440 также может выполнять демодуляцию, отмену расширения или некоторую другую обработку сигнала принятого сигнала в зависимости от реализации системы.
Выход декодера 440 может быть соединен с буфером 442 и декодером 444 МАС. Если структура данных интервала времени подобна структуре, изображенной на фиг. 2А-2В, адрес МАС находится в полях МАС после поля данных. Пользовательский терминал 110 буферизирует информацию интервала времени в буфере 442 до тех пор, пока декодер 444 МАС может декодировать адрес МАС в интервале времени.
Если адрес МАС принятого интервала времени не соответствует адресу МАС пользовательского терминала 110, или если принятый адрес МАС не соответствует зарезервированному адресу МАС для интервалов времени определения местоположения, то процессор 430 основной полосы частот может определить, что информация в интервале времени не предназначена для пользовательского терминала 110, и может игнорировать информацию в буфере 442 и остальную информацию, соответствующую интервалу времени.
Если декодер 444 МАС определяет, что адрес МАС для принятого интервала времени соответствует адресу МАС для пользовательского терминала 110, адрес МАС может направить принятые сигналы в процессор сигнала (не изображен), который может обрабатывать принятые данные. Если декодер 444 МАС определяет, что адрес МАС для принятого интервала времени соответствует зарезервированному МАС для интервалов времени определения местоположения, декодер МАС может направить принятые сигналы в модуль 450 синхронизации определения местоположения. Следовательно, когда адрес МАС указывает прием интервала времени определения местоположения, принятые данные подаются из буфера 442 в модуль 450 временных характеристик определения местоположения.
Модуль 450 временных характеристик определения местоположения может определять местоположение пользовательского терминала 110 частично на основании сигналов определения местоположения, принятых в интервале времени определения местоположения, если пользовательский терминал 110 сконфигурирован для определения местоположения на основании подвижной станции. Во многих системах пользовательский терминал не сконфигурирован для определения местоположения на основании подвижной станции, вместо этого пользовательский терминал определяет одно или более псевдорасстояний, соответствующих принятым сигналам определения местоположения, и передает псевдорасстояния в сеть или, например, в PLC в системе определения местоположения, в которой определяется местоположение пользовательского терминала 110. Последний способ может быть упомянут как определение местоположения с помощью подвижной станции.
Если пользовательский терминал 110 сконфигурирован для определения местоположения с помощью подвижной станции, модуль временных характеристик определения местоположения может определять одно или более псевдорасстояний, соответствующих сигналам, принятым в интервале времени определения местоположения, и может подавать величины псевдорасстояний в модуль 470 временных характеристик, который обеспечивает конфигурирование одной или более величин псевдорасстояний для передачи в сеть для определения местоположения.
Модуль 470 временных характеристик подает информацию на процессор 480 сигнала передачи, который может быть сконфигурирован с возможностью кодирования и модулирования информации способом, определенным для системы. Процессор 480 сигнала передачи может подавать обработанный сигнал на цифроаналоговый преобразователь (ЦАП) 424, в котором сигнал преобразуется в аналоговое представление.
Аналоговое представление сигнала подается из ЦАП 424 в тракт передачи РЧ блока 410, в котором оно может быть обработано в сигнал передачи. РЧ блок 410 подает сигнал передачи в антенну 402, которая передает его в пункт назначения, который может быть, например, базовой станцией.
Как описано выше, в одном варианте осуществления пользовательский терминал 110 может запрашивать интервал времени определения местоположения. Модуль 450 временных характеристик определения местоположения может быть сконфигурирован с возможностью инициирования или управления генератором 460 запроса определения местоположения, когда требуется определение местоположения.
Генератор 460 запроса определения местоположения может генерировать запрос интервала времени определения местоположения. Запрос может быть простым запросом, который идентифицирует пользовательский терминал 110, или может быть более подробным запросом, который включает в себя такую информацию, как идентификационные коды базовых станций или список кандидатов или список соседей, поддерживаемый пользовательским терминалом 110. Список кандидатов или список соседей может поддерживаться пользовательским терминалом 110 как часть управления в системе связи. Например, пользовательский терминал 110 может поддерживать список кандидатов или список соседей, чтобы осуществлять мониторинг мощностей сигналов базовых станций для потенциальных передач обслуживания.
Фиг. 5 - блок-схема последовательности этапов варианта осуществления способа 500 генерирования интервала времени определения местоположения в системе с прямой линией связи с временным мультиплексированием. Способ 500 может быть выполнен с помощью базовых станций системы фиг. 1 или с помощью источника сигнала фиг. 3.
Базовая станция может инициировать способ 500 для каждого периодического интервала времени определения местоположения или может инициировать способ 500 в ответ на запрос интервала времени определения местоположения. Способ начинается в блоке 520, в котором базовая станция синхронизирует временные характеристики своего интервала времени с системным временем. В вариантах осуществления, в которых базовая станция является частью большей системы с прямой линией связи с временным мультиплексированием, базовая станция может уже быть синхронизирована с системным временем независимо от передачи сигналов определения местоположения.
После синхронизации временных характеристик интервала времени с системным временем базовая станция может перейти в блок 520, в котором базовая станция определяет временные характеристики интервала времени определения местоположения. Планирование интервала времени определения местоположения координируется посредством множества базовых станций таким образом, что все базовые станции передают сигналы определения местоположения в предварительно определенный момент времени в интервале времени. Базовая станция может принимать планирование или распределение интервала времени определения местоположения, например, из процессора интервала времени, который может быть реализован в BSC.
После определения временных характеристик интервала времени определения местоположения базовая станция переходит в блок 530 для конфигурирования адреса МАС интервала времени определения местоположения. Базовая станция может конфигурировать адрес МАС как зарезервированный адрес МАС, который используется для интервалов времени определения местоположения и не назначается никакому пользовательскому терминалу. В качестве альтернативы, процессор интервала времени или модуль данных измерения расстояния может предоставлять адрес МАС для базовой станции пользователю в интервале времени определения местоположения.
Базовая станция переходит в блок 540 и конфигурирует интервал времени определения местоположения с помощью конфигурирования сигнала определения местоположения в подынтервале, назначенном базовой станции. Сигнал определения местоположения, соответствующий базовой станции, например, может быть пилот-сигналом, который базовая станция передает, или может быть некоторым другим сигналом, таким как PN код, код Уолша, “золотой” код, или некоторой другой последовательностью.
Базовая станция переходит в блок 550 и стирает остальные подынтервалы интервала времени определения местоположения. Базовая станция может активно стирать подынтервалы, для которых она не назначена. В качестве альтернативы, базовая станция может конфигурировать подынтервалы, для которых она не назначена, таким образом, чтобы они не имели данных.
После конфигурирования полного интервала времени определения местоположения базовая станция переходит в блок 560 и передает интервал времени определения местоположения в ранее определенный момент времени. Базовая станция может повторять способ 500 периодически или может повторять способ 500 на основании запроса определения местоположения.
Фиг. 6 - упрощенная блок-схема последовательности операций варианта осуществления способа 600 использования интервала времени данных определения местоположения. Способ 600 может быть выполнен в пользовательском терминале, таком как пользовательский терминал фиг. 1 и фиг. 4.
Способ 600 начинается в блоке 610, в котором пользовательский терминал принимает интервал времени данных. Интервал времени определения местоположения может быть сконфигурирован для появления в интервале времени, который сконфигурирован подобно обычному интервалу времени данных.
Пользовательский терминал переходит в блок 612 и буферизирует принятые данные. Если структура данных интервала времени определения местоположения подобна структуре, изображенной на фиг. 2В, пользовательский терминал не может определить адрес МАС, связанный с интервалом времени, до тех пор, пока не принята часть данных. Следовательно, пользовательский терминал может буферизировать принятые данные, по меньшей мере, до тех пор, пока пользовательский терминал не может определить адрес МАС интервала времени.
Пользовательский терминал переходит в блок 620 и определяет адрес МАС, ассоциированный с интервалом времени данных. Пользовательский терминал может определять адрес МАС тем же способом, как это выполняется для других интервалов времени данных.
Пользовательский терминал переходит в блок 630 принятия решения и определяет, соответствует ли адрес МАС, определенный в предыдущем блоке, адресу МАС пользовательского терминала. Если это так, пользовательский терминал переходит в блок 632, чтобы обработать принятые данные традиционным способом, определенным с помощью пользовательского терминала. После обработки данных традиционным способом пользовательский терминал может перейти в блок 680, и выполнение способа 600 завершается.
Возвращаясь в блок 630 принятия решения, если пользовательский терминал определяет, что адрес МАС принятого интервала времени не соответствует адресу МАС пользовательского терминала, пользовательский терминал переходит в блок 640 принятия решения, чтобы определить, соответствует ли принятый МАС МАС, который зарезервирован для интервалов времени определения местоположения.
Если нет, адрес МАС, вероятно, соответствует МАС некоторого другого устройства, а данные в принятом интервале времени не предназначены для пользовательского терминала. Пользовательский терминал переходит в блок 680, и выполнение способа 600 завершается.
Возвращаясь в блок 640 принятия решения, если пользовательский терминал определяет, что МАС из принятого интервала времени соответствует зарезервированному МАС определения местоположения, содержимое интервала времени соответствует сигналам определения местоположения. Пользовательский терминал переходит в блок 650, чтобы обработать сигналы определения местоположения.
В блоке 650 пользовательский терминал определяет временные характеристики для каждого из сигналов определения местоположения, включенных в интервал времени. В одном варианте осуществления пользовательский терминал может быть синхронизирован с системным временем и может определять смещение или задержку времени, соответствующую сигналам определения местоположения в каждом из подынтервалов. Так как сигналы в каждом интервале могут соответствовать разным источникам сигналов, пользовательский терминал может определять смещение времени, соответствующее каждому из источников сигналов. Пользовательский терминал может определять эквивалентное псевдорасстояние, соответствующее смещению временных характеристик, или может определять некоторый другой результат с использованием смещения временных характеристик.
Пользовательский терминал переходит в блок 660 и передает временные характеристики или величины, определенные из них, в модуль определения местоположения. Модуль определения местоположения может находиться в пользовательском терминале для определения местоположения на основе подвижной станции или может быть в сети для определения местоположения с помощью сети или подвижной станции. В последнем случае, когда определение местоположения выполняется в централизованном местоположении, пользовательский терминал может передавать информацию временных характеристик в базовую станцию для пересылки в PLC.
Пользовательский терминал переходит в блок 670 и определяет свое местоположение. Если пользовательский терминал сконфигурирован для определения локального местоположения, пользовательский терминал может определять свое местоположение без дополнительной помощи. Если пользовательский терминал сконфигурирован для определения местоположения с помощью подвижной станции, когда определение местоположения выполняется в обычном PLC, соединенном с базовой станцией, пользовательский терминал может определять свое местоположение в сообщении, доставляемом из PLC в пользовательский терминал. В других вариантах осуществления пользовательский терминал может не определять свое местоположение, и этот блок может быть пропущен. Например, определение местоположения может быть доступным только вне пользовательского терминала, когда определение местоположения используется персоналом экстренных служб в ответ на экстренный вызов.
Раскрыты способы и устройства, предназначенные для улучшения SNR сигнала определения местоположения и для генерирования сигналов определения местоположения способом, совместимым с традиционными устройствами. SNR сигналов определения местоположения может быть улучшено в системе с прямой линией связи с временным мультиплексированием с помощью конфигурирования интервала времени данных, чтобы передавать информацию определения местоположения. Информация определения местоположения может быть одновременно передана широковещательным способом с помощью множества источников сигналов, причем каждый передает часть составного интервала времени определения местоположения, принимаемого с помощью пользовательского терминала.
Интервал времени определения местоположения может быть разделен на множество подынтервалов. Каждая базовая станция или сектор базовой станции может быть назначен в конкретный подынтервал в соответствии с алгоритмом повторного использования подынтервала. Затем каждый источник сигнала передает сигнал определения местоположения в назначенном подынтервале и не передает в течение тех подынтервалов, для которых он не назначен.
Пользовательский терминал может принимать составной интервал времени определения местоположения, который включает в себя сигналы определения местоположения, передаваемые множеством источников сигналов, причем каждый соответствует подынтервалу в интервале времени определения местоположения. Приемник может принимать сигналы определения местоположения с большим SNR, так как каждый источник сигнала передает свой соответствующий сигнал определения местоположения в течение подынтервала, который является относительно свободным от шумов, когда никакой другой источник сигнала преднамеренно не передает сигнал в течение не назначенного подынтервала.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с вариантами осуществления, раскрытыми в настоящей заявке, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), процессора с сокращенным набором команд (RISC), специализированной интегральной схемы (ASIC), вентильной матрицы, программируемой в условиях эксплуатации (FPGA) или другого программируемого логического устройства, дискретной логической схемы или транзисторной логики, дискретных компонентов аппаратного обеспечения или любой их комбинации, предназначенной для выполнения функций, описанных в настоящей заявке. Процессор общего назначения может быть микропроцессором, но в альтернативе процессор может быть любым процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован как комбинация вычислительных устройств, например комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров совместно с ядром DSP или любая другая такая конфигурация.
Модуль программного обеспечения может находиться в памяти RAM, флэш-памяти, энергонезависимой памяти, памяти ROM, памяти EPROM (электрически программируемое ПЗУ), памяти EEPROM (электрически стираемое программируемое ПЗУ), в регистрах, на жестком диске, сменном диске, CD-ROM, или любом другом виде запоминающего носителя, известного в данной области техники. Примерный запоминающий носитель соединен с процессором таким образом, что процессор может считывать информацию из запоминающего носителя и записывать информацию на него. В качестве альтернативы, запоминающий носитель может быть единым целым с процессором.
Этапы способа, процесса или алгоритма, описанного в связи с вариантами осуществления, раскрытыми в настоящей заявке, могут быть осуществлены непосредственно в аппаратном обеспечении, в модуле программного обеспечения, выполняемом процессором, или в комбинации того и другого. Различные этапы или операции в способе или процессе могут быть выполнены в изображенной последовательности или могут быть выполнены в другой последовательности. Кроме того, один или более шагов процесса или способа могут быть пропущены или один или более шагов процесса или способа могут быть добавлены к способам и процессам. Дополнительный этап, блок или операция могут быть добавлены вначале, в конце или могут быть расположены между элементами способов и процессов.
Вышеприведенное описание раскрытых вариантов осуществления предоставлено для того, чтобы дать возможность любому специалисту в данной области техники изготовить или использовать изобретение. Различные модификации этих вариантов осуществления будут без труда понятны специалистам в данной области техники, а основные принципы, определенные в настоящей заявке, могут быть применены к другим вариантам осуществления, не выходя за рамки объема и сущности изобретения. Следовательно, не предполагается, что изобретение ограничено представленными вариантами осуществления, а должно соответствовать самому широкому объему, согласующемуся с принципами и новыми признаками, раскрытыми в настоящей заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНФИГУРАЦИЯ ФИЗИЧЕСКОГО КАНАЛА УПРАВЛЕНИЯ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ (PUCCH) URLLC СО СТРУКТУРОЙ ПОДЫНТЕРВАЛА | 2020 |
|
RU2774332C1 |
| КОНСТРУКЦИЯ КОРОТКОГО ФИЗИЧЕСКОГО КАНАЛА УПРАВЛЕНИЯ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ (PUCCH) ДЛЯ НОВОЙ РАДИОСЕТИ (NR) 5-ГО ПОКОЛЕНИЯ (5G) | 2018 |
|
RU2758801C2 |
| УСТРОЙСТВА И СПОСОБЫ КОНФИГУРИРОВАНИЯ И ОСУЩЕСТВЛЕНИЯ ПЕРЕДАЧИ ПО ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ СО СКАЧКООБРАЗНОЙ ПЕРЕСТРОЙКОЙ ЧАСТОТЫ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2024 |
|
RU2836032C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ, БАЗОВАЯ РАДИОСТАНЦИЯ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2742555C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДАННЫХ, КОМПЬЮТЕРНАЯ ПРОГРАММА И НОСИТЕЛЬ ДАННЫХ | 2016 |
|
RU2718966C1 |
| СПОСОБ РАСПРЕДЕЛЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В СЕТЕВЫХ КАНАЛАХ РАДИОСВЯЗИ | 2007 |
|
RU2350024C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2747131C1 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ И СПОСОБ РАДИОСВЯЗИ | 2017 |
|
RU2751218C1 |
| СИСТЕМА И СПОСОБ СОСУЩЕСТВОВАНИЯ РЕСУРСОВ СВЯЗИ С МАЛОЙ ЗАДЕРЖКОЙ И ДОПУСТИМОЙ ЗАДЕРЖКОЙ | 2018 |
|
RU2760159C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЭНЕРГОСБЕРЕЖЕНИЯ В БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТИ | 2013 |
|
RU2625812C2 |
Способ и устройство, предназначенные для генерирования и использования опорного сигнала определения местоположения, который дает возможность приемнику принимать сигналы определения местоположения из генераторов относительно слабых сигналов при наличии источника сильного сигнала. Опорные сигналы определения местоположения из множества источников могут быть синхронизированы таким образом, чтобы они передавались в пределах запланированного слота, в течение которого источник сигнала может конфигурировать передачу, которая включает в себя адрес управления доступом к среде, который соответствует значению, зарезервированному для сигналов определения местоположения. Каждый источник сигнала также конфигурирует передачу таким образом, чтобы она включала в себя опорный сигнал определения местоположения, который соответствует источнику сигнала, и расположен таким образом, что он возникает вовремя в пределах части данных запланированного слота, который имеет множество подслотов, причем каждый источник сигнала передает сигнал определения местоположения в подслот и не передает в других подслотах. Техническим результатом является определение местоположения мобильного устройства с высокой эффективностью в множестве состояний, включая состояние «близко-далеко». 7 н. и 28 з.п. ф-лы, 6 ил.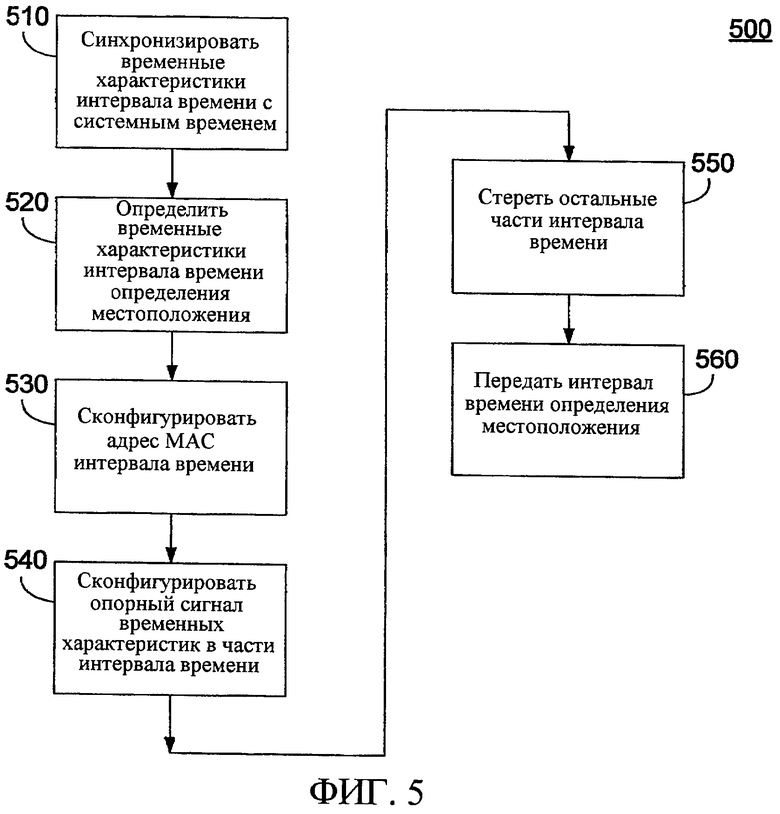
1. Способ распределения сигналов определения местоположения мобильного устройства в системе связи с временным мультиплексированием, причем способ содержит этапы, на которых:
синхронизируют множество источников сигналов определения местоположения с началом отсчета времени;
определяют временные характеристики слота определения местоположения из множества слотов данных, причем каждый слот данных имеет поле адреса и по меньшей мере одно поле данных, и слот определения местоположения имеет множество подслотов, расположенное внутри по меньшей мере одного поля данных слота определения местоположения;
конфигурируют слот определения местоположения с идентификатором, указывающим, что слот определения местоположения включает в себя информацию определения местоположения;
конфигурируют в первом источнике сигнала первый подслот с первым сигналом определения местоположения, соответствующим первому источнику сигнала из множества источников сигналов определения местоположения; и
передают с помощью первого источника сигнала сигнал определения местоположения в первом подслоте слота определения местоположения.
2. Способ по п.1, дополнительно содержащий этап, на котором конфигурируют в первом источнике сигнала пустые подслоты в слоте определения местоположения для подслотов, отличных от первого подслота.
3. Способ по п.1, дополнительно содержащий этапы, на которых конфигурируют во втором источнике сигнала второй подслот, отличный от первого подслота, со вторым сигналом определения местоположения, соответствующим второму источнику сигнала из множества источников сигналов определения местоположения;
конфигурируют во втором источнике сигнала пустой подслот, по меньшей мере, в первом подслоте; и
передают с помощью второго источника сигнала второй сигнал определения местоположения в слоте определения местоположения.
4. Способ по п.3, в котором второй подслот отделен от первого подслота, по меньшей мере, с помощью предварительно определенного защитного периода.
5. Способ по п.1, в котором этап определения временных характеристик слота определения местоположения содержит определение временных характеристик слота на основании предварительно определенного периода слота определения местоположения.
6. Способ по п.1, в котором этап определения временных характеристик слота определения местоположения содержит этап определения временных характеристик слота на основании запроса слота определения местоположения.
7. Способ по п.1, в котором этап конфигурирования слота определения местоположения идентификатором содержит этап конфигурирования слота определения местоположения адресом управления доступом к среде (MAC), зарезервированным для слотов определения местоположения.
8. Способ по п.1, в котором первый сигнал определения местоположения соответствует пилот-сигналу, соответствующему первому источнику сигнала.
9. Способ по п.1, в котором первый сигнал определения местоположения соответствует псевдошумовой (PN) последовательности, соответствующей первому источнику сигнала.
10. Способ распределения сигналов определения местоположения мобильного устройства в системе связи с временным мультиплексированием, причем способ содержит этапы, на которых:
генерируют в каждом из множества источников сигналов соответствующий слот определения местоположения, имеющий множество подслотов, причем каждый из соответствующих слотов определения местоположения имеет сигнал определения местоположения, соответствующий источнику сигнала в подслоте, назначенном источнику сигнала, причем слот определения местоположения генерируется из множества слотов данных, причем каждый слот данных имеет поле адреса и по меньшей мере одно поле данных, и при этом множество подслотов расположено внутри по меньшей мере одного поля данных слота определения местоположения; и
передают в предварительно определенном слоте из каждого из множества источников сигналов сигнал определения местоположения в соответствующем слоте определения местоположения.
11. Способ по п.10, в котором каждый из множества слотов определения местоположения включает в себя адрес управления доступом к среде (MAC), зарезервированный для слотов определения местоположения.
12. Способ по п.10, в котором каждый из множества источников сигналов стирает подслоты в соответствующих слотах определения местоположения, для которых он не назначен.
13. Способ по п.10, в котором каждый из множества источников сигналов содержит базовую станцию в системе связи.
14. Способ определения местоположения мобильного устройства в системе связи с временным мультиплексированием, причем способ содержит этапы, на которых:
принимают слот, имеющий идентификатор, указывающий, что слот включает в себя информацию определения местоположения;
определяют из первого подслота в слоте первый сигнал определения местоположения, соответствующий первому источнику сигнала определения местоположения;
определяют из второго подслота в слоте второй сигнал определения местоположения, соответствующий второму источнику сигнала определения местоположения;
определяют временные характеристики, связанные с местоположением, на основании первого и второго сигналов определения местоположения; и
определяют местоположение мобильного устройства на основании первого и второго сигналов определения местоположения.
15. Способ по п.14, в котором идентификатор содержит адрес управления доступом к среде (MAC), зарезервированный для определения местоположения.
16. Способ по п.14, в котором первый сигнал определения местоположения содержит пачку пилот-сигнала из первого источника сигнала определения местоположения.
17. Способ по п.14, в котором первый сигнал определения местоположения содержит PN последовательность из первого источника сигнала определения местоположения.
18. Способ по п.14, в котором первый подслот отделен во времени от второго подслота с помощью предварительно определенного защитного периода.
19. Способ по п.14, в котором второй подслот непосредственно следует за первым подслотом.
20. Способ по п.14, в котором второй сигнал определения местоположения принимают в течение периода времени, в котором первый источник сигнала определения местоположения не передает никакие символы.
21. Способ по п.14, дополнительно содержащий передачу временных характеристик, связанных с местоположением, на основании первого и второго сигналов определения местоположения в центр определения местоположения.
22. Устройство для передачи сигналов определения местоположения мобильного устройства в системе связи с временным мультиплексированием, содержащее:
модуль данных измерения расстояния, сконфигурированный с возможностью генерирования сигнала определения местоположения;
процессор слота, сконфигурированный с возможностью генерирования слота определения местоположения, имеющего поле адреса и множество подслотов, причем, по меньшей мере, первый подслот назначен сигналу определения местоположения и, по меньшей мере, второй подслот отличается от первого подслота, содержащего нулевые данные, и поле адреса сконфигурировано для адреса, зарезервированного для слотов определения местоположения; и
радиочастотный (РЧ) приемопередатчик, сконфигурированный с возможностью передачи слота определения местоположения в предварительно определенное время.
23. Устройство по п.22, в котором сигнал определения местоположения содержит пачку пилот-сигнала, соответствующую базовой станции, ассоциированной с первым подслотом.
24. Устройство по п.22, в котором сигнал определения местоположения содержит псевдошумовую последовательность, соответствующую базовой станции, ассоциированной с первым подслотом.
25. Устройство по п.22, в котором адрес, зарезервированный для слотов определения местоположения, содержит зарезервированный адрес управления доступом к среде (MAC).
26. Устройство по п.22, в котором РЧ приемопередатчик сконфигурирован с возможностью приема запроса определения местоположения, причем модуль данных измерения расстояния генерирует сигнал определения местоположения в ответ на запрос.
27. Устройство для извлечения сигналов определения местоположения мобильного устройства из сигнала связи с временным мультиплексированием, содержащее:
радиочастотный (РЧ) внешний интерфейс, сконфигурированный с возможностью приема составного слота определения местоположения, имеющего информацию подслота, передаваемую с помощью множества различных источников сигналов;
декодер адреса, сконфигурированный с возможностью декодирования адреса в составном слоте определения местоположения; и
модуль временных характеристик, сконфигурированный с возможностью извлечения множества сигналов определения местоположения из составного слота определения местоположения, причем каждый сигнал определения местоположения, извлеченный из подслота, соответствует одному из множества различных источников сигналов.
28. Устройство по п.27, в котором декодер адреса сконфигурирован с возможностью декодирования адреса управления доступом к среде (MAC), зарезервированного для слотов определения местоположения.
29. Устройство по п.27, в котором модуль временных характеристик сконфигурирован с возможностью определения смещения времени, соответствующего каждому из множества сигналов определения местоположения.
30. Устройство для передачи сигналов определения местоположения мобильного устройства в системе связи с временным мультиплексированием, содержащее:
средство для генерирования в каждом из множества источников сигналов соответствующего слота определения местоположения, имеющего множество подслотов, причем каждый из соответствующих слотов определения местоположения имеет сигнал определения местоположения, соответствующий источнику сигнала в подслоте, назначенном источнику сигнала, причем слот определения местоположения генерируется из множества слотов данных, причем каждый слот данных имеет поле адреса и по меньшей мере одно поле данных, и при этом множество подслотов расположено внутри по меньшей мере одного поля данных слота определения местоположения; и
средство для передачи в предварительно определенном слоте из каждого из множества источников сигналов сигнала определения местоположения в соответствующем слоте определения местоположения.
31. Устройство по п.30, в котором средство для генерирования соответствующего слота определения местоположения сконфигурировано с возможностью генерирования нулевых данных в каждом из подслотов, отличных от подслота, назначенного источнику сигнала.
32. Устройство по п.30, в котором средство для генерирования соответствующего слота определения местоположения конфигурирует адрес в соответствующем слоте определения местоположения для адреса управления доступом к среде (MAC), зарезервированного для определения местоположения.
33. Устройство для извлечения сигналов определения местоположения мобильного устройства из сигнала связи с временным мультиплексированием, содержащее:
средство для приема составного слота определения местоположения, имеющего информацию подслота, передаваемую с помощью множества различных источников сигналов;
средство для декодирования адреса, содержащегося в составном слоте определения местоположения; и
средство для извлечения множества сигналов определения местоположения из составного слота определения местоположения, причем каждый сигнал определения местоположения, извлеченный из подслота, соответствует одному из множества различных источников сигналов.
34. Устройство по п.33, дополнительно содержащее средство для буферизации информации подслота.
35. Устройство по п.33, в котором средство для извлечения множества сигналов определения местоположения обрабатывает составной слот определения местоположения, если адрес соответствует адресу, зарезервированному для слотов определения местоположения.
| US 6169903 B1, 02.01.2001 | |||
| RU 2004102512 A, 27.03.2005 | |||
| Самоцентрирующий люнет | 1983 |
|
SU1148752A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |

