Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники.
Известен волновой привод, содержащий корпус, размещенные в нем электродвигатель и волновую передачу, генератор волн которой связан с валом электродвигателя через промежуточный редуктор [1]. Недостатком этого волнового привода является значительные осевые габариты, вызванные последовательным расположением выходного вала и волновой передачи.
Этого недостатка лишен выбранный в качестве прототипа волновой привод, содержащий корпус, размещенный в нем двухопорный выходной вал, волновую зубчатую передачу с гибким и жестким колесами, а также размещенным внутри гибкого колеса генератором волн, через промежуточный редуктор связанным с валом электродвигателя [2]. Каждый конец выходного вала установлен на опоре, размещенной в корпусе. Генератор волн расположен в корпусе на своей опоре.
Недостатком такого волнового привода является сложность конструкции и значительная масса, что обусловлено наличием двух крупногабаритных опор выходного вала и опоры генератора волн. В условиях авиационной и особенно ракетной техники наличие избыточной массы крайне нежелательно, что объясняется высокой удельной стоимостью вывода груза на орбиту.
Задачей заявленного изобретения является разработка такого волнового привода, в котором достигалось бы упрощение конструкции и снижение массы привода.
Технический результат достигается за счет того, что в известном волновом приводе, содержащем корпус, размещенный в нем двухопорный выходной вал, волновую зубчатую передачу с гибким и жестким колесами, а также размещенным внутри гибкого колеса генератором волн, через промежуточный редуктор связанным с валом электродвигателя, при этом первый конец выходного вала установлен на опоре, размещенной в корпусе, согласно изобретению жесткое колесо волновой зубчатой передачи жестко закреплено на корпусе, а гибкое колесо соединено с выходным валом, в выходном валу выполнена полость, электродвигатель установлен внутри нее, а второй конец выходного вала установлен на опоре, размещенной в расточке генератора волн, являющейся общей опорой и для генератора волн, при этом опора первого конца выходного вала зафиксирована в осевом направлении как относительно выходного вала, так и относительно корпуса. Выполнение одной опоры выходного вала общей и для генератора волн позволяет снизить число подшипников и за счет этого упростить конструкцию и снизить массу волнового привода.
На чертеже приведен пример конкретного выполнения волнового привода, продольный разрез.
Волновой привод содержит корпус 1, размещенный в нем двухопорный выходной вал 2, волновую зубчатую передачу 3 с гибким 4 и жестким 5 колесами. Внутри гибкого колеса 4 размещен кулачковый генератор волн 6 с подшипником 7 с гибкими кольцами (так называемый гибкий подшипник), через промежуточный редуктор 8 связанный с валом 9 электродвигателя 10. Первый конец 11 выходного вала 2 установлен на опоре 12, размещенной в корпусе 1. Жесткое колесо 5 волновой зубчатой передачи 3 жестко закреплено на корпусе 1 посредством штифтов 13, а гибкое колесо 4 соединено с выходным валом 2 посредством шлицевой муфты 14. В выходном валу 2 выполнена полость 15, электродвигатель 10 установлен внутри нее. Второй конец 16 выходного вала 2 установлен на опоре 17, размещенной в расточке 18 генератора волн 6, являющейся общей опорой и для генератора волн 6. Эта опора выполнена в виде установленных рядом друг с другом двух подшипников 19, что улучшает условия работы подшипников за счет лучшего восприятия изгибающего момента со стороны генератора волн 6, однако может быть использована опора и в виде одного подшипника, как в прототипе. Вследствие этого заявляется признак, обобщенный термином «опора», который подразумевает как один подшипник (как в прототипе), так и два (в приведенном примере конкретного исполнения). Опора 12 первого конца 11 выходного вала 2 зафиксирована в осевом направлении как относительно выходного вала 2 - его заплечиком 20 и установленным на наружной поверхности выходного вала 2 пружинным кольцом 21, так и относительно корпуса 1 - его заплечиком 22 и установленным на внутренней поверхности корпуса 1 пружинным кольцом 23.
Волновой привод работает следующим образом: при включении электродвигателя 10 вращение его вала 9 через промежуточный редуктор 8 передается на генератор волн 6. Генератор волн 6, вращаясь на опоре 17, своим подшипником 7 деформирует гибкое колесо 4, вводит его в зацепление с жестким колесом 5 и приводит в движение гибкое колесо 4 и через шлицевую муфту 14 - выходной вал 2, вращающийся в опорах 12 и 17. Осевое положение генератора волн 6 обеспечивается его установкой на опоре 17, и подшипник 7 может (в пределах тепловых деформаций корпуса 1) перемещаться в осевом направлении вдоль гладкой внутренней поверхности гибкого колеса 4. Это устраняет возможный натяг между опорами 12 и 17 и обеспечивает их нормальные условия работы. При этом опора 17 сохраняет свою соосность корпусу 1 за счет того, что деформированное гибкое колесо 4 жестко базируется многопарным зацеплением своих зубьев с зубьями жесткого колеса 5, а соосность генератора волн 6 гибкому колесу 4 обеспечивается тем, что наружная поверхность подшипника 7 находится в поверхностном контакте с внутренней поверхностью гибкого колеса 4, а внутренняя - с наружной поверхностью генератора волн 6. Возможное отклонение оси гибкого колеса относительно оси жесткого с условием многопарности зацепления теоретически лежит в пределах бокового зазора зубьев в волновой зубчатой передаче. Величина максимального бокового зазора δ в зубчатых передачах находится обычно в пределах 0,2 мм [3]. Поэтому для максимальной оценки смещения гибкого колеса относительно жесткого можно принять эту величину, хотя в действительности за счет многопарности зацепления смещение гибкого колеса существенно меньше. Однако приняв в качестве оценки радиального смещения гибкого колеса относительно жесткого завышенную величину δ=0,2 мм, при расстоянии между опорами 12 и 17 L=100 мм, получим, что радиальное смещение гибкого колеса (а следовательно, и генератора волн 6) δ=0,2 мм приведет к угловому повороту (перекосу) выходного вала 2 по отношению к корпусу 1 на угол:
А=δ/L=0,2/100=0,002 [рад]≈0,114°=6,84'.
Указанный перекос выходного вала не приводит к ухудшению работы опор 12 и 17, так как в случае использования в качестве опор радиальных шариковых подшипников перекос их внутренних колец по отношению к наружным не превосходит считающейся допустимой величины в 1/4°=15' [4]. По отношению же к устанавливаемой на вал нагрузке перекос выходного вала также не является критичным, т.к. между валом волнового привода и валом исполнительного механизма, как правило, устанавливается компенсирующая муфта для компенсации несоосностей и угловых перекосов. Совокупность всех указанных существенных признаков позволяет устранить специальную опору генератора волн за счет ее совмещения с опорой выходного вала, упростить конструкцию и снизить массу волнового привода.
Указанные преимущества позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература:
1. Е.Г.Гинзбург, Волновые зубчатые передачи, Л., Машиностроение, 1969, стр.125, рис.60.
2. Авторское свидетельство СССР №1089325, МПК: F16H 1/00, 1984 г. - прототип.
3. И.Я.Левин «Справочник конструктора точных приборов», М., Машиностроение, 1964, стр.459, табл.200.
4. Там же, стр.563.
Изобретение может быть использовано в качестве приводов автоматики изделий авиационной и ракетной техники. Волновой привод содержит корпус (1), размещенный в нем двухопорный выходной вал (2), волновую зубчатую передачу (3) с гибким (4) и жестким (5) колесами, генератором волн (6), размещенным внутри гибкого колеса и через промежуточный редуктор (8) связанным с валом (9) электродвигателя (10). Первый конец (11) выходного вала (2) установлен на опоре (12), размещенной в корпусе. Жесткое колесо (5) волновой зубчатой передачи жестко закреплено на корпусе (10). Гибкое колесо (4) соединено с выходным валом (2). В выходном валу выполнена полость (15), внутри которой установлен электродвигатель. Второй конец (16) выходного вала установлен на опоре (17), размещенной в расточке (18) генератора волн, являющейся общей опорой и для генератора волн. Опора (12) первого конца (11) выходного вала зафиксирована в осевом направлении как относительно выходного вала, так и относительно корпуса. Изобретение позволяет упростить конструкцию и снизить массу. 1 ил.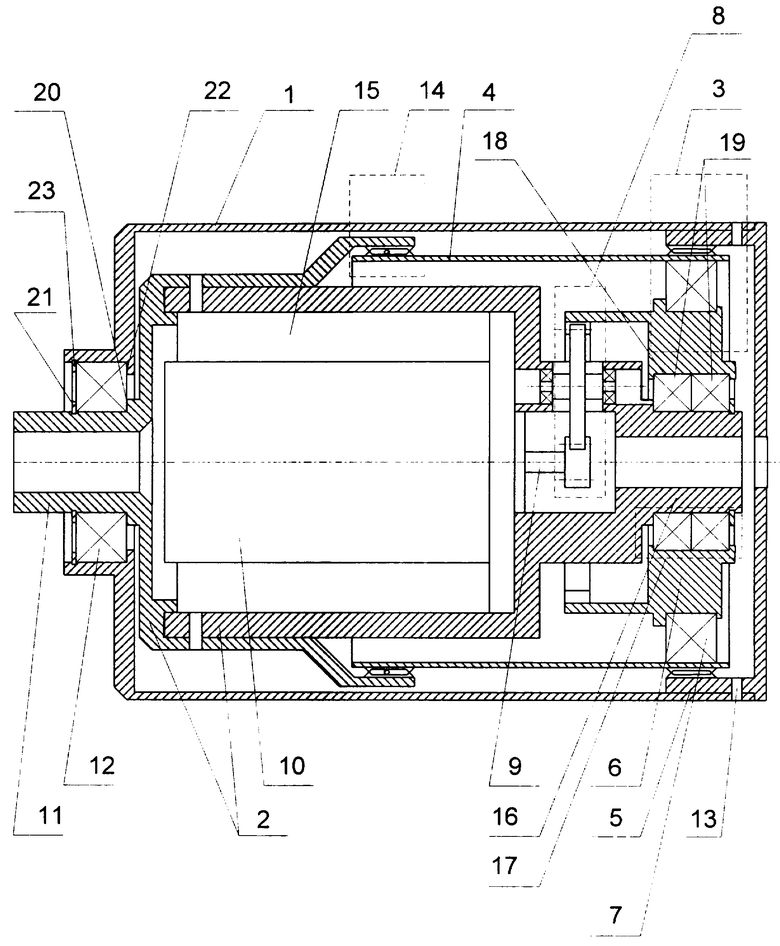
Волновой привод, содержащий корпус, размещенный в нем двухопорный выходной вал, волновую зубчатую передачу с гибким и жестким колесами, а также размещенным внутри гибкого колеса генератором волн, через промежуточный редуктор связанным с валом электродвигателя, при этом первый конец выходного вала установлен на опоре, размещенной в корпусе, отличающийся тем, что жесткое колесо волновой зубчатой передачи жестко закреплено на корпусе, а гибкое колесо соединено с выходным валом, в выходном валу выполнена полость, электродвигатель установлен внутри нее, а второй конец выходного вала установлен на опоре, размещенной в расточке генератора волн, являющейся общей опорой и для генератора волн, при этом опора первого конца выходного вала зафиксирована в осевом направлении как относительно выходного вала, так и относительно корпуса.
| Привод | 1983 |
|
SU1089325A1 |
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2098691C1 |
| ВОЛНОВОЙ ПРИВОД | 2003 |
|
RU2266451C2 |
| ГИНЗБУРГ Е.Г | |||
| Волновые зубчатые передачи | |||
| - Л.: Машиностроение, 1969, с.125, рис.60. | |||

