Область техники
Изобретение относится к электронной схеме для регулировки входного сигнала на нелинейном элементе.
Уровень техники
Нелинейный элемент, например усилитель мощности, вносит в сигнал искажения. Для уменьшения искажений, обусловленных усилителями, используются различные средства. Поскольку зависимость искажения амплитуды или фазы сигнала от амплитуды входного сигнала часто близка к известной функции, искажение компенсируют с помощью компонента, имеющего аналогичные характеристики. Типичные компоненты для предыскажений включают диод, полевой транзистор или биполярный транзистор. Хотя такое решение является простым, оно не обладает точностью. Характеристика одного компонента не может достаточно хорошо скомпенсировать искажения нелинейного элемента, например усилителя мощности.
Предыскажение может быть выполнено с использованием справочных таблиц, которые, кроме того, можно обновлять для достижения адаптации, поскольку на искажения усилителя влияют, например, температура, срок службы усилителя и изменение сигнала, подаваемого в усилитель.
Для оценки искажения вместо справочных таблиц можно использовать многочлен порядка выше первого. Как правило, для хорошей компенсации искажений порядок должен быть по меньшей мере пятым или даже седьмым. Однако это радикально увеличивает количество операций умножения.
Применение справочных таблиц и многочленов приводит к наличию сложных, медленных и неидеальных компенсирующим схем, которые вызывают нежелательные задержки в обработке сигнала. К тому же, операторы умножения, используемые при решении в виде полинома, трудно реализовать, а кроме того, они вызывают нежелательную задержку. Таким образом, независимо от того, используется ли в действительности линеаризация, усилители мощности не в состоянии линейно усилить сигнал, если изменяется величина мощности поступающего сигнала, что имеет место, например, в системе UMTS (универсальной системе мобильной связи), системе CDMA (системе с многостанционным доступом с кодовым разделением каналов) и WCDMA системе (широкополосной CDMA системе).
Краткое описание изобретения
Целью настоящего изобретения является создание улучшенной схемы регулировки входного сигнала нелинейного элемента.
Согласно одному из аспектов настоящего изобретения предложена электронная схема для регулировки по меньшей мере одного параметра входного сигнала нелинейного элемента, содержащая детектор для определения силы входного сигнала; по меньшей мере один аналоговый контроллер для формирования по меньшей мере одного управляющего сигнала как кусочной аппроксимации нелинейной зависимости между указанным по меньшей мере одним параметром и силой входного сигнала, определенной детектором; и по меньшей мере одну регулирующую схему для регулировки по меньшей мере одного параметра входного сигнала согласно по меньшей мере одному управляющему сигналу, поступающему по меньшей мере из одного контроллера.
Согласно другому аспекту настоящего изобретения предложена электронная схема для регулировки амплитуды входного сигнала усилителя, содержащая детектор для определения силы входного сигнала; аналоговый контроллер для формирования управляющего сигнала как кусочной аппроксимации нелинейной зависимости между указанным по меньшей мере одним параметром и силой входного сигнала, определенной детектором; и регулирующую схему для регулировки амплитуды входного сигнала согласно управляющему сигналу.
Согласно еще одному аспекту настоящего изобретения предложена электронная схема для регулировки фазы входного сигнала усилителя, содержащая детектор для определения силы входного сигнала; аналоговый контроллер для формирования управляющего сигнала как кусочной аппроксимации нелинейной зависимости между указанным по меньшей мере одним параметром и силой входного сигнала, определенной детектором; и регулирующую схему для регулировки фазы входного сигнала согласно управляющему сигналу.
Согласно еще одному аспекту настоящего изобретения предложен способ регулировки по меньшей мере одного параметра входного сигнала нелинейного элемента, включающий определение детектором силы входного сигнала; формирование по меньшей мере одним аналоговым контроллером по меньшей мере одного управляющего сигнала как кусочной аппроксимации нелинейной зависимости между указанным по меньшей мере одним параметром и силой входного сигнала, определенной детектором; и регулировку по меньшей мере одной регулирующей схемой по меньшей мере одного параметра входного сигнала согласно по меньшей мере одному управляющему сигналу, поступающему по меньшей мере из одного контроллера.
Согласно еще одному аспекту настоящего изобретения предложена электронная схема, содержащая: средства определения силы входного сигнала; средства формирования управляющего сигнала по меньшей мере одним аналоговым контроллером как кусочной аппроксимации нелинейной зависимости между по меньшей мере одним параметром и силой входного сигнала; и средства регулировки для регулировки по меньшей мере одного указанного параметра входного сигнала согласно управляющему сигналу, поступающему по меньшей мере из одного аналогового контроллера.
Предпочтительные варианты выполнения настоящего изобретения описаны в зависимых пунктах формулы изобретения.
Способ и система согласно изобретению обладают несколькими преимуществами. Схема проста и может быть легко подстроена под нелинейный элемент и желаемые характеристики. Схема имеет малую задержку.
Перечень чертежей
Ниже настоящее изобретение будет описано подробно на примерах предпочтительных вариантов его выполнения со ссылками на сопровождающие чертежи, где:
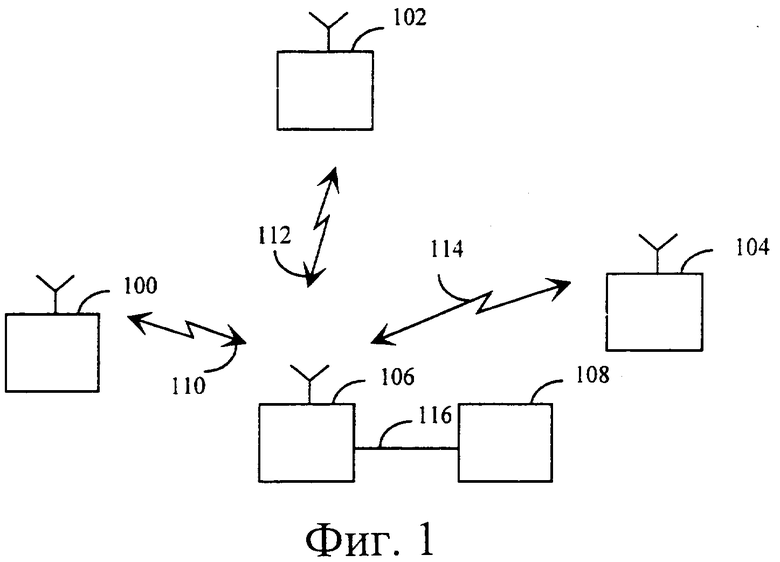
на фиг.1 показана система радиосвязи,
на фиг.2 показана регулирующая схема,
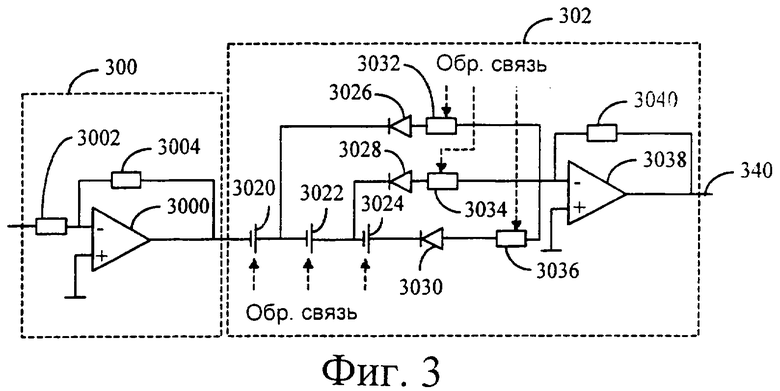
на фиг.3 показана схема контроллера,
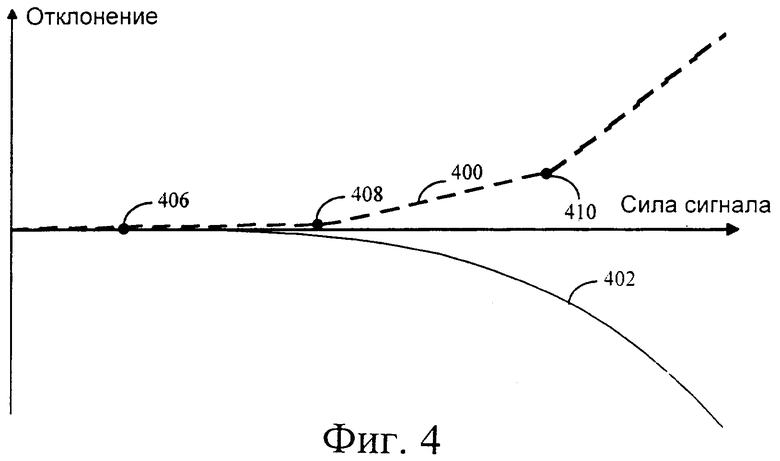
на фиг.4 иллюстрируется зависимость между управляемым параметром и силой входного сигнала,
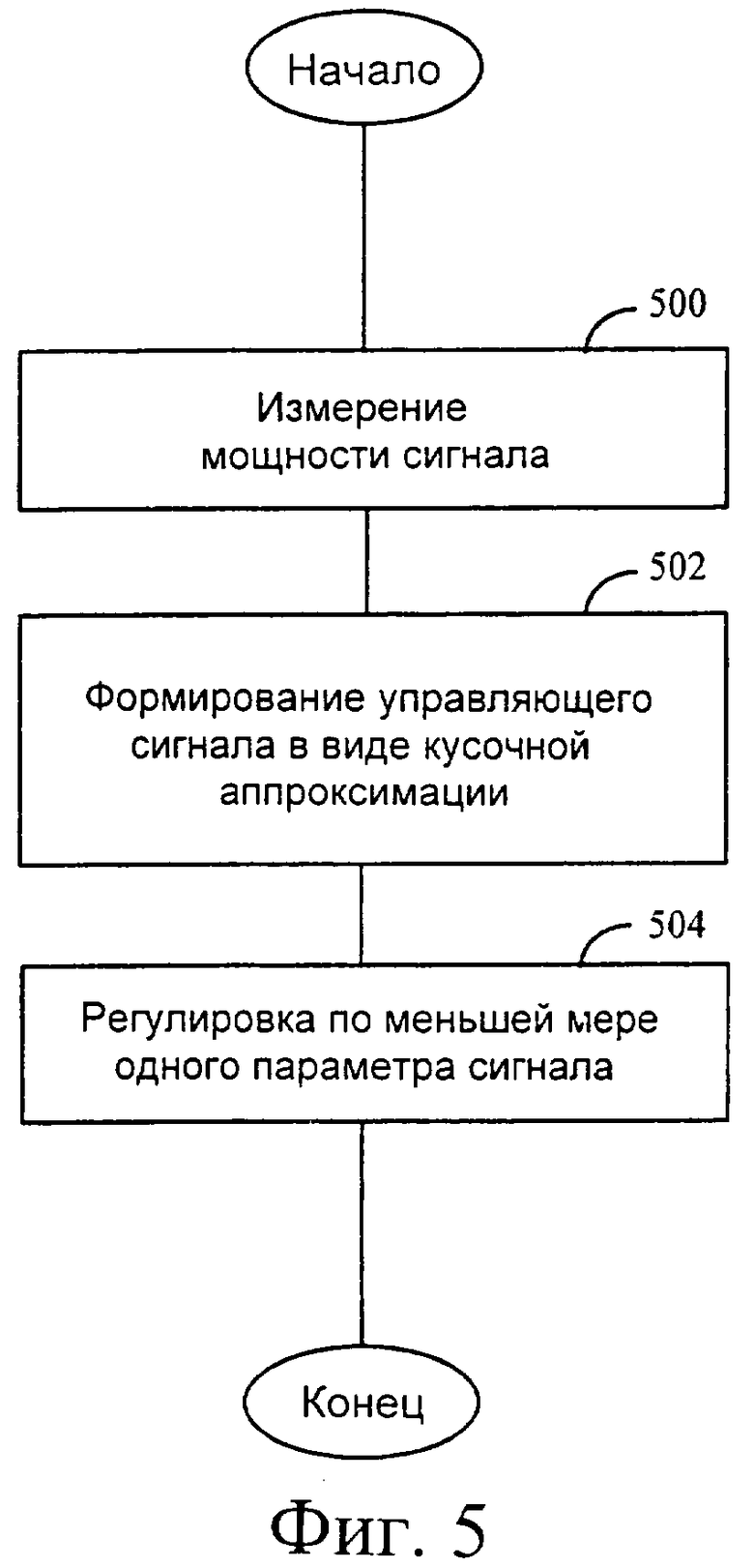
на фиг.5 показана последовательность шагов при выполнении способа,
на фиг.6А показана регулирующая схема с линией передачи,
на фиг.6В показана регулирующая схема с направленным ответвителем,
на фиг.6С показана регулирующая схема с циркулятором,
на фиг.7 показана регулирующая схема между генератором сигналов и нагрузкой.
Описание вариантов осуществления настоящего изобретения
Настоящее решение особенно хорошо подходит для передатчика в системе радиосвязи, например в системе стандарта UMTS или WCDMA, но ее применение этим не ограничивается.
Прежде всего, на фиг.1 показана система радиосвязи. Типичная цифровая система радиосвязи включает оборудование 100-104 абонента, по меньшей мере одну базовую станцию 106 и контроллер 108 базовой станции. Базовую станцию 106 можно также называть узлом В, а контроллер 108 базовой станции можно называть контроллером радиосети. Оборудование 100-104 абонента связывается с базовой станцией 106 с использованием сигналов 110-114. Базовая станция 106 может связываться с контроллером 108 базовой станции посредством цифровой линии 116 связи. Оборудование 100-104 абонента может представлять собой неподвижные терминалы, оборудование пользователя, установленное на транспортном средстве, или портативные мобильные терминалы. Сигналы 110-114 между оборудованием 100-104 абонента и базовой станцией 106 несут цифровую информацию, например речь, данные или управляющую информацию, сгенерированную абонентами или системой радиосвязи.
Согласно предлагаемому решению электронная схема используется для регулировки по меньшей мере одного параметра входного сигнала нелинейного элемента. Этот параметр может быть коэффициентом передачи или фазой нелинейного элемента. Элемент можно считать линейным, если отношение мощности сигнала на выходе к мощности сигнала на входе постоянно, то есть Poutput/Pinput=c1, где Poutput - мощность на выходе и Pinput - мощность на входе, а c1 - константа. Сила сигнала может быть измерена в виде напряжения или мощности. В линейном элементе отношение выходного напряжения к входному напряжению постоянно, то есть Voutput/Vinput=-с2, где Voutput - выходное напряжение, Vinput - входное напряжение, a c2 - константа. Кроме того, линейность можно определить так, что сдвиг фазы, обусловленный линейным элементом, является постоянным при всех величинах мощности входного сигнала. В этом случае разность между фазой выходного сигнала и фазой входного сигнала постоянна независимо от уровня мощности входного сигнала.
Например, на фиг.2 делитель 200 мощности делит сигнал, подаваемый на нелинейный элемент, на два компонента, первый из которых поступает в детектор 202, а второй проходит по меньшей мере в одну регулирующую схему 208, 210. Второй компонент сигнала может быть задержан (на фиг.2 такой вариант не показан), так чтобы эта задержка соответствовала задержке первого компонента сигнала в детекторе 202 и по меньшей мере в одном аналоговом контроллере 204, 206. Детектор 202 измеряет мощность сигнала и может представлять собой детектор огибающей. Сигнал с выхода детектора 202 поступает по меньшей мере в один аналоговый контроллер 204, 206, каждый из которых формирует управляющий сигнал в виде кусочной аппроксимации нелинейной зависимости между по меньшей мере одним параметром и измеренной мощностью входного сигнала. Аналоговые контроллеры, изображенные на фиг.2, могут представлять собой контроллер 204 амплитуды и контроллер 206 фазы. Управляющий сигнал из каждого аналогового контроллера 204, 206 может быть подан в регулирующую схему 208, 210 для регулировки по меньшей мере одного параметра второго компонента сигнала согласно управляющим сигналам. Входной сигнал по меньшей мере с одним управляемым параметром подается затем в нелинейный элемент 212. Поскольку нелинейный элемент 212 может быть усилителем мощности, усиливающим радиочастотный сигнал, усиленный сигнал может быть подан в антенну для его передачи в виде электромагнитного излучения. Усиливаемый сигнал может также быть принятым сигналом, поступающим из антенны в усилитель. Радиочастотный сигнал может быть сигналом в основной полосе частот или сигналом модулированной несущей, частота которого может меняться от килогерц до гигагерц. Таким образом, данная электронная схема может быть использована, например, в базовой станции или в мобильном оборудовании.
Кусочная аппроксимация может быть обратной относительно нелинейной характеристики нелинейного элемента 212, и, следовательно, вариант выполнения настоящего изобретения может использоваться для линеаризации нелинейного элемента. Или же вариант выполнения настоящего изобретения может использоваться для осуществления по меньшей мере одного желаемого нелинейного воздействия на сигнал.
Один из вариантов выполнения настоящего изобретения может включать обратную связь 214, идущую с выхода нелинейного элемента 212 по меньшей мере в один контроллер 204, 206 (показана штриховой линией), но этот признак не является необходимым. Обратная связь может включать преобразователь обратной связи (не показан) для каждого контроллера 204, 206, который преобразует сигнал с выхода нелинейного элемента 212 в вид, приемлемый для контроллера 204, 206. Вместо сигнала с выхода нелинейного элемента 212 или в дополнение к нему сигнал 214 обратной связи может передавать информацию, например, о таких параметрах, как температура или влажность нелинейного элемента 212, в контроллеры 204, 206 для компенсации этих воздействий.
На фиг.3 более подробно показан аналоговый контроллер. Этот пример включает два инвертирующих каскада. Первый каскад 300 является буфером между детектором и фактическим управляющим каскадом 302. Первый каскад 300 может включать операционный усилитель или транзистор 3000 и два резистора 3002 и 3004, которые могут иметь одинаковую величину, что дает полное усиление - 1. В общем случае полное усиление равно =-Ps1/Ri, где Rs1 - шунтирующее сопротивление 3004 a Ri - входное сопротивление 3002. В принципе буферный каскад 300 не всегда обязателен. Однако буфер может использоваться для развязки детектора и контроллера и для уменьшения нагрузки контроллера.
На фиг.3 показано, что фактический управляющий каскад 302 может включать три генератора 3020-3024 напряжения, три нелинейных компонента 3026-3030, входные резисторы 3032-3036, усилитель 3038 и шунтирующий резистор 3040. Усилитель 3038 может быть транзистором или операционным усилителем. В общем случае, фактический управляющий каскад 302 может включать N или N+1 генераторов напряжения и N+1 нелинейных компонентов, где N равно по меньшей мере 1. Основание для использования только N генераторов напряжения заключается в том, что первый генератор напряжения, соответствующий генератору 3020 напряжения на фиг.3, может отсутствовать. Генератор 3020 напряжения может также быть размещен в буфере 300, так чтобы генератор 3020 напряжения был расположен, например, между землей и положительным выводом усилителя 3000. Все входные резисторы 3032-3036 не являются обязательными, но, если они используются, их количество, в общем случае, может достигать N+1.
Аналоговый контроллер может содержать по меньшей мере один генератор 3020-3024 напряжения, соединенные последовательно, по меньшей мере два нелинейных компонента 3026-3030, например диоды, соединенные параллельно, и операционный усилитель 3038. Каждый из по меньшей мере двух нелинейных компонентов 3026-3030 имеет последовательное сопротивление резистора 3032-3036, а каждый из по меньшей мере двух нелинейных компонентов 3026-3030 с последовательно соединенным резистором 3032-3036 имеет различное смещение по напряжению с помощью одного генератора 3020-3024 напряжения. В этом случае операционный усилитель 3038 с шунтирующим резистором 3040 объединяет напряжения на параллельно соединенных нелинейных компонентах 3026-3030 в управляющий сигнал.
Вместо последовательного соединения генераторы 3020-3024 напряжения могут быть соединены параллельно. Аналогично, нелинейные компоненты 3026-3030 могут быть соединены последовательно. Можно также соединить, например, четыре генератора напряжения так, что два генератора напряжения окажутся соединенными параллельно, а два других генератора напряжения окажутся соединенными последовательно. Они могут быть связаны с нелинейными компонентами, которые соединены последовательно или параллельно. Имеется много способов соединения компонентов, и поскольку преобразование (соответствие) между последовательным и параллельным соединениями по сути является очевидным, варианты возможных соединений не показаны.
Предположим, что нелинейные компоненты 3026-3030 представляют собой смещенные в прямом направлении диоды, сопротивление которых, в простейшем приближении, ведет себя так, что является бесконечно большим ниже порогового напряжения Uth, и равно нулю выше порогового напряжения Uth. Пороговое напряжение диода может составлять 0,7 В. Каскад 300 буферного усилителя инвертирует сигнал, поступающий из детектора. Когда напряжение входного сигнала меньше чем U1+Uth, напряжение на выходе каскада 300 входного буферного усилителя меньше - U1-Uth, и на выходе 340 контроллера имеется ноль. Наклон, то есть производная зависимости между входным напряжением и выходным напряжением 340 контроллера, также можно считать нулевым на первом отрезке кусочной аппроксимации, если этот первый отрезок предполагается линейным.
Когда входная мощность, измеренная через напряжение, достигает U1+Uth, диод D1 3026, включенный последовательно резистору R1 3032, начинает пропускать ток. Выше напряжения U1+Uth напряжение между диодом 3026 и резистором 3032 равно -Uin+U1+Uth. Это заставляет ток течь через резистор 3032, и напряжение на выходе контроллера сместится вверх. Дифференциальное усиление G контроллера теперь равно G=(-Rs1/Ri)•(-Rs2/R1)=(-1)•(-Rs2/R1)=Rs2/R1, что можно рассматривать как наклон зависимости между мощностью на входе и выходным напряжением 340 контроллера на втором отрезке кусочной аппроксимации, если второй отрезок предполагается линейным. Следовательно, в пороговой точке U1+Uth зависимость между входным напряжением и выходным напряжением 340 контроллера изменяется от одной аппроксимации к другой.
Если уровень сигнала возрастает до ситуации, при которой выходное напряжение детектора достигает значения U1+U2+Uth, диод D2 3028 начинает пропускать ток через резистор R2 3034. Дифференциальное усиление G контроллера в этом случае возрастает до величины
 которую можно считать наклоном зависимости между входным напряжением и выходным напряжением 340 контроллера на третьем отрезке кусочной аппроксимации, если третий отрезок предполагается линейным. Следовательно, в пороговой точке U1+U2+Uth зависимость между входным напряжением и выходным напряжением 340 контроллера изменяется еще раз.
которую можно считать наклоном зависимости между входным напряжением и выходным напряжением 340 контроллера на третьем отрезке кусочной аппроксимации, если третий отрезок предполагается линейным. Следовательно, в пороговой точке U1+U2+Uth зависимость между входным напряжением и выходным напряжением 340 контроллера изменяется еще раз.
Если уровень сигнала еще увеличивается до ситуации, когда выходное напряжение на детекторе достигает U1+U2+U3+Uth, диод D3 3030 начинает пропускать ток через резистор R3 3036. В этом случае дифференциальное усиление G увеличивается до значения 
которое можно считать наклоном зависимости между входным напряжением и выходным напряжением 340 контроллера на четвертом отрезке кусочной аппроксимации, если четвертый отрезок предполагается линейным. Следовательно, в пороговой точке U1+U2+U3+Uth зависимость между входным напряжением и выходным напряжением 340 контроллера изменяется. Следовательно, в пороговой точке U1+U2+U3+Uth зависимость между входным напряжением и напряжением выхода 340 изменяется.
Согласно такой кусочно-линейной аппроксимации кривая, представляющая напряжение управляющего сигнала, резко меняется в пороговых точках, а это означает, что в пороговых точках кривая имеет разрыв производной. В действительности, характеристика диодов является намного более сложной, и следовательно, отрезки аппроксимации не являются в точности линейными. Это является преимуществом. В пороговых точках наклон управляющего сигнала фактически не испытывает резкого изменения, и производную можно считать непрерывной, а изменение напряжения управляющего сигнала при кусочной аппроксимации происходящим плавно от участка к участку. Плавностью в пороговых точках можно управлять путем соответствующего изменения конструкции схемы.
Генераторы 3020-3024 напряжения используются для задания каждой пороговой точки, в которой управляющий сигнал меняется от одного участка кусочной аппроксимации к другому. Нелинейные компоненты, например диоды 3026-3030, могут влиять на параметры пороговых точек.
Выход нелинейного элемента может быть связан с генераторами 3020-3024 напряжения и/или с резисторами 3032-3036 с формированием обратной связи. В этом случае генераторы 3020-3024 напряжения и/или сопротивления резисторов 3032-3036 могут регулироваться согласно сигналу обратной связи. Кроме того, в зависимости от выбора нелинейных компонентов сигнал обратной связи может также управлять работой нелинейных компонентов 3026-3030. Таким образом, кусочно меняющееся напряжение управляющего сигнала может быть адаптивно относительно параметров пороговых точек и наклона (или форме кривой) на каждом участке. Сигнал обратной связи может быть выходным сигналом нелинейного компонента, или же сигнал обратной связи может относиться к состоянию нелинейного компонента, например его температуре, для компенсации температурного дрейфа.
Преимущество схемы состоит в том, что параметры могут быть адаптированы к нелинейному элементу и к требуемой характеристике. Дифференциальное усиление на каждом участке кусочной аппроксимации может быть отрегулировано путем подбора соответствующих сопротивлений 3032-3036. Вместо подбора соответствующих сопротивлений подбирать величину сопротивлений можно с использованием регулируемых сопротивлений. Полное усилие контроллера может быть подстроено резистором 3040. Сопротивление 3040 может иметь фиксированную величину, или же сопротивление 3040 может быть регулируемым. Количество параллельных соединений в контроллере определяет, насколько хорошо фактическая характеристика соответствует желаемой. Чем больше параллельных соединений, пороговых точек и участков (отрезков) аппроксимации, тем точнее фактическая характеристика следует за желаемой нелинейной характеристикой.
Если используется обратная связь (позиция 214 на фиг.2), сигнал обратной связи может менять параметры кусочной аппроксимации. Эти параметры могут включать уровень напряжений генераторов 3020-3024 и/или значение сопротивлений 3032-3036. Обратная связь может менять рабочие значения других компонентов. Она может менять пороговые точки и наклон (или форму) участков кусочной аппроксимации.
На фиг.4 показана нелинейная характеристика и ее кусочная аппроксимация. По оси х отложена измеренная мощность входного сигнала, а по оси у отложено отклонение. В типичном усилителе отклонение, например фазовая задержка, с ростом мощности сигнала увеличивается нелинейно. Нормализованная фазовая задержка усилителя показана в виде кривой 402. Кусочная линейная характеристика контроллера соответствует кусочной аппроксимации 400. Три пороговых точки 406-410 соответствуют пороговым точкам, определяемым генераторами 3020-3024 напряжения на фиг.3.
Детектор преобразует мощность входного сигнала в напряжение с соответствующей амплитудой. Это напряжение с выхода детектора преобразуется в кусочно меняющуюся зависимость напряжения, соответствующую соотношению между мощностью входного сигнала и управляемым параметром, например фазой или амплитудой. Чем выше мощность, тем выше напряжение на выходе контроллера. Это напряжение управляет соответствующей регулирующей схемой так, что, например, схема регулировки фазы обеспечивает опережение сигнала, идущего в усилитель, и компенсирует отставание по фазе нелинейного элемента. Соответственно схема для регулировки амплитуды увеличивает уровень сигнала, идущего в усилитель, и компенсирует уменьшение усилия нелинейного элемента.
Восстанавливающая форму кусочная кривая 400 может быть выбрана так, чтобы обеспечить опережение фазы настолько, что в нелинейном элементе устраняется отставание по фазе при всех значениях мощности входного сигнала. В результате нелинейный элемент может иметь линейную характеристику фазы выходного сигнала для всех уровней сигнала.
Восстанавливающая форму кусочная кривая 400 может быть выбрана так, чтобы усилить сигнал настолько, что устраняется снижение усиления в нелинейном элементе при всех значениях мощности входного сигнала. В результате нелинейный элемент может иметь линейную амплитуду выходного сигнала (постоянное усиление) при всех уровнях сигнала.
Настоящее решение может представлять собой интегральную или дискретную электронную схему. Диоды могут представлять собой диоды Шоттки.
И наконец, на фиг.5 показана последовательность операций для предлагаемого способа. На шаге 500 детектор измеряет мощность входного сигнала. На шаге 502 по меньшей мере один аналоговый контроллер формирует по меньшей мере один управляющий сигнал в виде кусочной аппроксимации нелинейной зависимости между по меньшей мере одним параметром и мощностью входного сигнала, измеренной детектором. На шаге 504 по меньшей мере одна регулирующая схема регулирует по меньшей мере один параметр входного сигнала согласно по меньшей мере одному управляющему сигналу, поступающему по меньшей мере из одного контроллера.
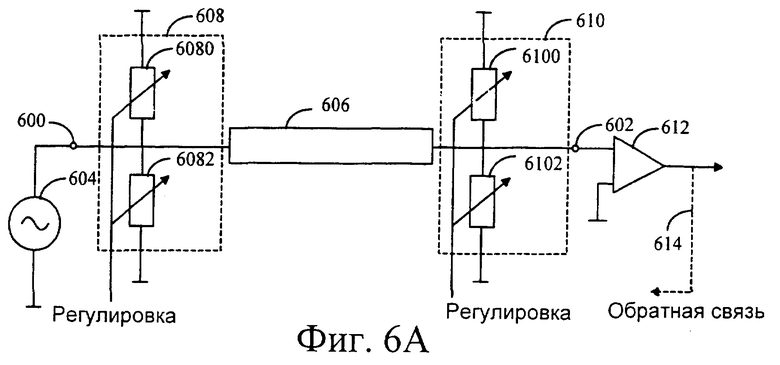
На фиг.6А показан пример регулирующей схемы (фиг.2, позиция 210), предназначенной для регулировки амплитуды сигнала. Регулирующая схема на фиг.6А содержит входной вывод 600 и выходной вывод 602. В общем случае схема может содержать множество выводов для входа и выхода сигналов. Генератор 604 сигнала, который может быть передатчиком в базовой станции или в оборудовании пользователя, выдает сигнал на выходной вывод 600. Кроме того, схема содержит согласующий компонент 606, который согласует вход и выход сигналов на выводах 600, 602. Согласующий компонент влияет на импеданс схемы, и поэтому согласующий компонент с различными свойствами может изменять импеданс схемы. Согласующий компонент 606 может быть, например, линией передачи, длина I которой составляет одну четверть длины волны λ сигнала, то есть, I=λ/4+n λ/2, где n=0, 1, 2…∞. Соответственно фазовый сдвиг (в радианах) в согласующем компоненте также может быть выражен как Δφ=π/2+nπ, где π ≈3,1415926. Импеданс линии передачи может составлять 50Ω, 75Ω, 100Ω, 600Ω или любую другую желательную величину. Регулирующая схема на фиг.6А включает два блока 608, 610 регулируемого (активного) сопротивления, включенных между согласующим компонентом 606 и землей и предназначенных для изменения сопротивления на входе и выходе 600, 602 схемы регулировки амплитуды. Нагрузка 612, которая может быть нелинейным элементом, например усилителем, может быть соединена с выходом 602. Нелинейность амплитуды, обусловленная нагрузкой 612, может быть скомпенсирована регулирующей схемой.
Каждый из блоков 608, 610 регулируемых сопротивлений может содержать много компонентов, соединенных параллельно и/или последовательно, причем по меньшей мере некоторые из таких компонентов являются регулируемыми. Компоненты в блоках 608, 610 сопротивления имеют также комплементарные друг другу (взаимодополняющие) реактивные сопротивления. Например, блок 608 сопротивления может содержать блоки 6080, 6082 регулируемого импеданса, а блок 610 сопротивления может включать блоки 6100, 6102 регулируемого импеданса. Блок 6080 регулируемого импеданса может быть индуктивным, а блок 6082 регулируемого импеданса может быть емкостным или наоборот. В процессе регулировки блоков 6080, 6082 регулируемого импеданса в блоке 608 регулируемого сопротивления их реактивное сопротивление может оставаться противоположным друг другу, а регулировка может только изменять значение активного сопротивления блока 608 регулируемого сопротивления. Аналогично, регулировка блоков регулируемого импеданса 6100, 6102, имеющих комплементарные реактивные сопротивления, может изменять активное сопротивление блока 610 регулируемого сопротивления.
Один из вариантов выполнения настоящего изобретения может включать обратную связь 614 (показана штриховой линией) с выхода нелинейного элемента 612 к блокам 608, 610 регулируемого сопротивления, предназначенную для регулировки блоков 6080, 6082 и 6100, 6102 регулируемого импеданса, но этот признак не является необходимым.
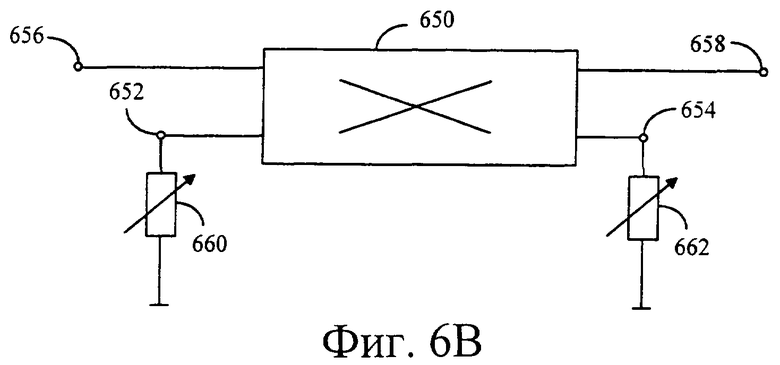
На фиг.6В показан пример, в котором согласующий компонент представляет собой направленный ответвитель 650 с четырьмя выводами 652-658. В этом примере к двум выводом 652, 654 подключены блоки 660, 662 регулируемого сопротивления, но в общем случае, по меньшей мере один вывод связан с блоком регулируемого сопротивления.
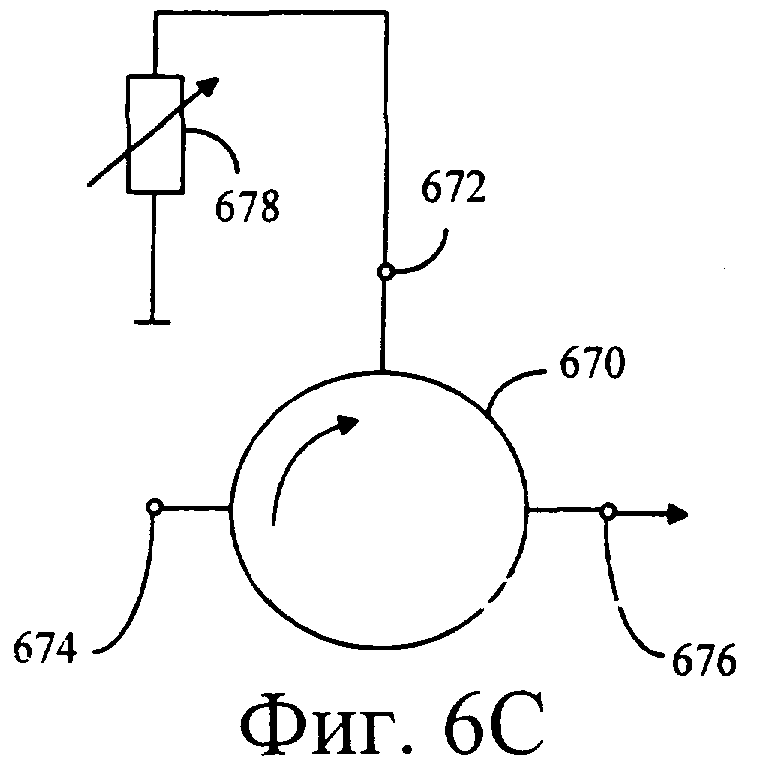
На фиг.6С показан пример, в котором согласующий компонент представляет собой циркулятор 670 с тремя выводами 672-676. В этом примере вывод 672 связан с блоком 678 регулируемого сопротивления. Когда передача происходит от вывода 674 к выводу 676, вывод 676 представляет собой выходной вывод. Любой из других выводов также может быть соединен с блоком регулируемого сопротивления.
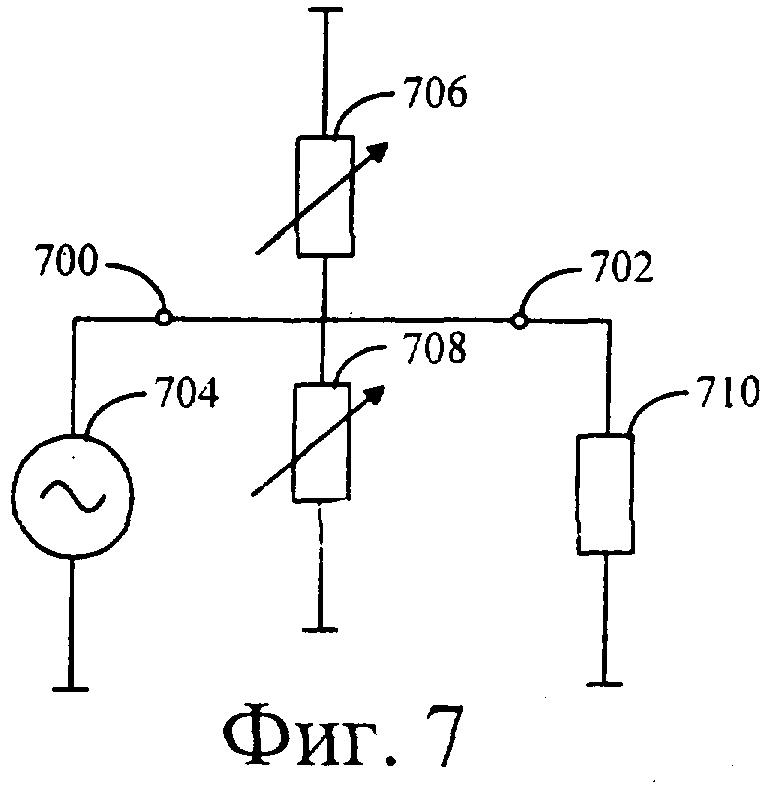
На фиг.7 показан другой пример регулирующей схемы, предназначенной для регулировки амплитуды сигнала. Регулирующая схема на фиг.7 содержит входной вывод 700 и выходной вывод 702. В общем случае схема может содержать множество выводов для входа и выхода сигнала. Генератор 704 сигналов подает сигнал на входной вывод 700. Параллельно между линией сигнала (линия между выводами 700, 702) и землей включена пара блоков 706, 708 регулируемого импеданса. Земля может быть нулевым потенциалом или любым другим опорным уровнем, относительно которого изменяют сигнал на сигнальной линии. Блок 706 регулируемого импеданса может быть индуктивным, а блок 708 регулируемого импеданса может быть емкостным. В общем случае схема может содержать больше одной пары блоков регулируемого импеданса, так чтобы каждая пара блоков регулируемого импеданса находилась между одной парой входных и выходных выводов. Блоки регулируемого импеданса в каждой паре имеют комплементарные друг другу реактивные сопротивления. Нагрузка 710, которая может быть нелинейным элементом, например усилителем, соединена с выходным выводом 702. Как на фиг.6А, 6В и 6С, каждый блок регулируемого импеданса может содержать множество компонентов, соединенных параллельно и/или последовательно.
Регулирующую схему, описанную на фиг.6А, 6В, 6С и 7, можно считать регулируемым аттенюатором, поскольку изменение ее сопротивления ослабляет в желаемой степени сигнал на нагрузке.
Комплементарные реактивные сопротивления блоков импеданса, о которых шла речь в связи с описанием фиг.6А, 6В, 6С и 7, могут быть выражены математически с использованием комплексных чисел, так что импеданс можно считать комплексным числом, действительная часть которого представляет собой активное сопротивление, а мнимая часть - реактивное сопротивление. Реактивное сопротивление, в свою очередь, обусловлено индуктивностью или емкостью. Импеданс Z параллельного соединения двух блоков с импедансами Z1=R1+jX1 и Z2=R2+jX2 может быть выражен как

где R1+jX1 - первый блок с импедансом Z1, R2+jX2 - второй блок с импедансом Z2, R1 - активная часть импеданса первого блока, R2 - активная часть импеданса второго блока, X1 - реактивная часть импеданса первого блока, X2 - реактивная часть импеданса второго блока, a j - мнимая единица. Импеданс Z может быть также выражен как

и может быть действительным, то есть импеданс Z может быть активным сопротивлением, если активная часть R1 и активная часть R2 равны, R1=R2, и если реактивная часть X1 противоположна реактивной части Х2, т.е. X1=-X2. Когда импеданс Z является чисто активным, значения параллельно включенных импедансов Z1, Z2 являются комплексно сопряженными, то есть Z1=R1+jX1,  .
.
Хотя настоящее изобретение описано выше на примере со ссылкой на сопровождающие чертежи, понятно, что оно этим не ограничено, но может быть изменено разными способами в объеме формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1995 |
|
RU2087857C1 |
| РЕГУЛИРУЮЩАЯ СХЕМА | 2005 |
|
RU2374754C2 |
| КОМПЕНСАЦИЯ ПАРАМЕТРА ПРОЦЕССА В ПЕРЕДАЮЩЕМ УСТРОЙСТВЕ ПРОЦЕССА | 2012 |
|
RU2596074C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ ГАЗА | 2016 |
|
RU2665753C2 |
| ФУНКЦИОНАЛЬНЫЙ ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2408136C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ХАРАКТЕРИСТИК БИОЛОГИЧЕСКОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2128942C1 |
| Генератор случайного сигнала | 1977 |
|
SU690513A1 |
| ЭЛЕКТРОННАЯ ЧАСТЬ ПОЛЕВОГО УСТРОЙСТВА, ЗАПИТЫВАЕМАЯ ВНЕШНИМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2007 |
|
RU2414739C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КАЛИБРОВКИ УПРАВЛЕНИЯ МОЩНОСТЬЮ УСТРОЙСТВА РАДИОСВЯЗИ | 2002 |
|
RU2297714C2 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ФЕРРОМАГНИТНЫХ ТРУБ | 2007 |
|
RU2370762C2 |
Изобретение относится к электронной схеме для регулировки, по меньшей мере, одного параметра входного сигнала нелинейного элемента. Технический результат - обеспечение малой задержки при регулировке входного сигнала нелинейного элемента. Детектор измеряет амплитуду входного сигнала. Аналоговый контроллер формирует, по меньшей мере, один управляющий сигнал в виде кусочной аппроксимации нелинейной зависимости между указанным, по меньшей мере, одним параметром и силой входного сигнала, измеренной детектором. Регулирующая схема регулирует, по меньшей мере, один параметр входного сигнала согласно, по меньшей мере, одному управляющему сигналу, поступающему из, по меньшей мере, одного контроллера. 3 н. и 10 з.п. ф-лы, 7 ил.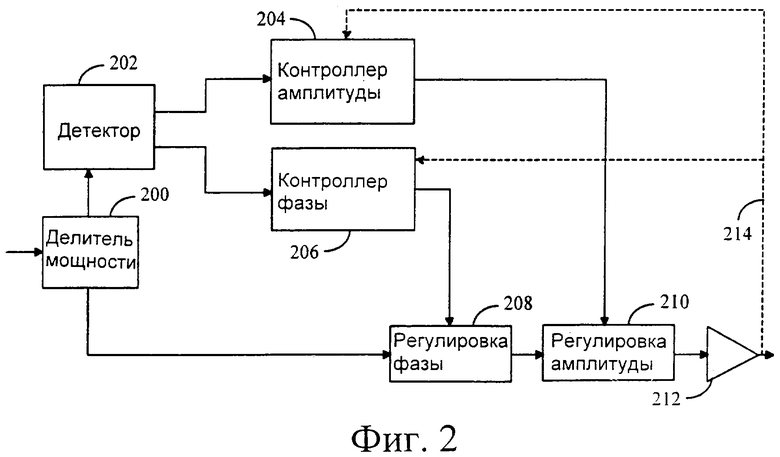
1. Электронная схема для регулировки, по меньшей мере, одного параметра входного сигнала нелинейного элемента, содержащая
средства определения силы входного сигнала;
по меньшей мере, одно аналоговое управляющее средство;
средства регулировки; причем
указанное, по меньшей мере, одно аналоговое управляющее средство содержит, по меньшей мере, один генератор напряжения и, по меньшей мере, два диода, на каждый из которых поданы различные уровни напряжения смещения с помощью, по меньшей мере, одного генератора напряжения для формирования управляющего сигнала, как кусочной аппроксимации нелинейной зависимости между указанным, по меньшей мере, одним параметром и силой входного сигнала, определенной средствами определения силы входного сигнала;
указанное, по меньшей мере, одно аналоговое управляющее средство выполнено с возможностью объединения выходных сигналов диодов в управляющий сигнал; и
указанные средства регулировки выполнены с возможностью регулировки указанного, по меньшей мере, одного параметра входного сигнала согласно управляющему сигналу.
2. Схема по п.1, в которой средства регулировки выполнены с возможностью регулировки амплитуды входного сигнала согласно управляющему сигналу.
3. Схема по п.1, в которой средства регулировки выполнены с возможностью регулировки фазы входного сигнала согласно управляющему сигналу.
4. Схема по п.1, в которой указанное, по меньшей мере, одно аналоговое управляющее средство выполнено с возможностью формирования управляющего сигнала в виде кусочной аппроксимации, которая включает кусочную линейную аппроксимацию.
5. Схема по п.1, в которой указанное, по меньшей мере, одно аналоговое управляющее средство выполнено так, что оно имеет различные зависимости между силой входного сигнала и указанным, по меньшей мере, одним параметром на различных отрезках кусочной аппроксимации.
6. Схема по п.1, которая дополнительно включает обратную связь с выхода диода к указанному, по меньшей мере, одному аналоговому управляющему средству для изменения параметров кусочной аппроксимации согласно сигналу обратной связи.
7. Схема по п.1, в которой указанное, по меньшей мере, одно аналоговое управляющее средство содержит
по меньшей мере, два каскада, включающие первый каскад, содержащий буфер, и второй каскад, содержащий, по меньшей мере, одно из следующего:
по меньшей мере, один генератор напряжения;
указанные, по меньшей мере, два диода с последовательно включенным резистором;
усилитель; и
усилитель, выполненный с возможностью объединения выходных сигналов этих, по меньшей мере, двух диодов в управляющий сигнал.
8. Схема по п.1, в которой указанное, по меньшей мере, одно аналоговое управляющее средство для формирования управляющего сигнала осуществляет кусочную аппроксимацию нелинейной зависимости между указанными, по меньшей мере, одним параметром и силой входного сигнала, причем этот, по меньшей мере, один параметр включает коэффициент передачи или фазу.
9. Способ регулировки, по меньшей мере, одного параметра входного сигнала нелинейного элемента, включающий
определение детектором силы входного сигнала;
формирование управляющего сигнала, по меньшей мере, одним аналоговым контроллером, содержащим, по меньшей мере, один генератор напряжения и, по меньшей мере, два диода, на каждый из которых поданы различные уровни напряжения смещения с помощью, по меньшей мере, одного генератора напряжения, как кусочной аппроксимации нелинейной зависимости между указанным, по меньшей мере, одним параметром и силой входного сигнала, определенной детектором; и
регулировку, по меньшей мере, одной регулирующей схемой указанного, по меньшей мере, одного параметра входного сигнала согласно управляющему сигналу, поступающему от указанного, по меньшей мере, одного аналогового контроллера.
10. Способ по п.9, дополнительно включающий формирование, по меньшей мере, одним аналоговым контроллером управляющего сигнала в виде кусочной линейной аппроксимации.
11. Способ по п.9, дополнительно включающий формирование, по меньшей мере, одним аналоговым контроллером различных зависимостей между силой входного сигнала и указанным, по меньшей мере, одним параметром на различных отрезках кусочной аппроксимации.
12. Способ по п.9, дополнительно включающий введение сигнала обратной связи с выхода диода, по меньшей мере, в один аналоговый контроллер и изменение параметров кусочной аппроксимации согласно этому сигналу обратной связи.
13. Передатчик, содержащий
средства определения силы входного сигнала;
аналоговое управляющее средство; и
средства регулировки; причем
указанное аналоговое управляющее средство содержит, по меньшей мере, один генератор напряжения и, по меньшей мере, два диода, на каждый из которых поданы различные уровни напряжения смещения с помощью, по меньшей мере, одного генератора напряжения для формирования управляющего сигнала, как кусочной аппроксимации нелинейной зависимости между указанным, по меньшей мере, одним параметром и силой входного сигнала, определенной средствами определения силы входного сигнала;
указанное аналоговое управляющее средство выполнено с возможностью объединения выходных сигналов диодов в управляющий сигнал; и
средства регулировки выполнены с возможностью регулировки указанного, по меньшей мере, одного параметра входного сигнала согласно управляющему сигналу.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОЩНОСТИ ПЕРЕДАВАЕМЫХ СИГНАЛОВ | 1993 |
|
RU2115241C1 |
| US 5742201, A, 21.04.1998 | |||
| US 6414546, B2, 02.07.2002 | |||
| US 6326840, B1, 04.12.2001 | |||
| US 5760646, A, 02.06.1998 | |||
| Установка для сжигания отходов | 1984 |
|
SU1191685A1 |
| Способ гидролиза растительного сырья | 1981 |
|
SU1199797A1 |

