Уровень техники
Область техники, к которой относится изобретение
Это изобретение в целом относится к технологиям каротажа удельного сопротивления пласта путем использования устройств индукционного каротажа. Более конкретно, изобретение относится к способам и системам для внесения поправок на влияния скважины в измерении удельного сопротивления посредством устройств индукционного каротажа, которые включают в себя поперечные или трехмерные зонды.
Предшествующий уровень техники
Устройства индукционного каротажа используются в нефтяной и газовой промышленности для определения удельного сопротивления формаций, окружающих скважину. Устройства индукционного каротажа работают посредством использования передающей катушки (передатчика) для формирования переменного магнитного поля в формациях. Это переменное магнитное поле индуцирует вихревые токи в пластах. Одна или более приемных катушек (приемников), размещенных на расстоянии от передатчика, используются для детектирования тока, протекающего в пласте. Величины принятых сигналов пропорциональны электропроводности пласта. Таким образом, значения электропроводности пласта могут быть получены из принятых сигналов.
Однако неоднородности в пласте усложняют получение значения электропроводности пласта из принятых сигналов. Наиболее распространенное усложнение, которое оказывает воздействие на получение значения электропроводности пласта из принятых сигналов, возникает из-за наличия проводящих флюидов в скважине, окружающих устройство индукционного каротажа. В целом это называют влиянием скважины на данные каротажа. Часто флюиды в скважине (буровой раствор) делают очень солеными, тем самым проводящими, что является составляющей частью режима бурения. Проводящие буровые растворы могут вносить существенную долю в принятые сигналы и, тем самым, должны быть тщательно удалены.
Недавно были разработаны устройства поперечного индукционного каротажа для исследования удельных сопротивлений пластов с анизотропией, наклонными плоскостями, дефектами или трещинами. Эти устройства поперечного индукционного каротажа имеют передающие и приемные катушки, расположенные так, что магнитные моменты катушек передатчика и/или приемника перпендикулярны оси скважины. Хорошо известно из уровня техники, что при поперечном расположении катушек влияния скважины на каротаж очень велики, когда устройство перемещается в скважине эксцентрично в направлении, перпендикулярном магнитным моментам катушки. См. например, работу: Moran и Gianzero, “Effects of Formation Anisotropy on Resistivity Logging Measurements,” («Влияние анизотропии пласта на измерения при каротаже методом сопротивления", Geophysics, 44, 1266-1286 (1979)).
Причина влияния эксцентричности поперечных катушек раскрыта в Патенте США №6573722, выданном Rosthal и др. В этом патенте описан способ уменьшения влияния скважины на каротаж при эксцентричном движении устройства индукционного каротажа. Конкретно, этот патент описывает конструкции устройства, в которых устройство индукционного каротажа содержит проводящий элемент в его изоляционной оплетке, или устройство индукционного каротажа содержит проводящий корпус устройства. Эти проводящие части значительно уменьшают влияния скважины на данные такого устройства, но не устраняют все такие влияния. Дополнительное корректирование было бы необходимо для полного устранения влияний скважины на данные устройства поперечного индукционного каротажа.
Патент США №5041975, выданный Minerbo и др., раскрывает способ внесения поправок на влияние скважины на данные зондовых устройств индукционного каротажа. Этот способ использует данные от 4-х самых коротких зондов зондового устройства индукционного каротажа, наряду с приблизительными измерениями размера скважины и проводимости скважинной жидкости, для определения 2 параметров в 4-параметрической модели скважина-пласт. Модель состоит из скважины, имеющей радиус r, пробуренной в однородном пласте с проводимостью σf. Скважинный флюид имеет проводимость σm и устройство скважинного каротажа находится на расстоянии (отклонении) s от стенки скважины. Быстрая непосредственная модель состоит из большой таблицы, построенной для ряда вариантов значений 4 параметров в пределах допустимого диапазона. Процесс инверсии минимизирует функцию пени E, которая представляет собой сумму квадратов взвешенной разности между измеренной характеристикой и прогнозируемой характеристикой, как показано в Уравнении (1):

В этом уравнении  - это измеренная проводимость от j-го зонда, и
- это измеренная проводимость от j-го зонда, и  - это моделируемая проводимость от j-го зонда с заданными параметрами σm, σf, r, и s. Когда E минимизирована, соответствующие параметры σm, σf, r, и s используются для расчета поправки на влияние скважины для всех зондов.
- это моделируемая проводимость от j-го зонда с заданными параметрами σm, σf, r, и s. Когда E минимизирована, соответствующие параметры σm, σf, r, и s используются для расчета поправки на влияние скважины для всех зондов.
Хотя имеются эффективные способы для внесения поправок на влияния скважины для осевых зондов, инструменты с поперечным зондом вызывают особые проблемы. Чувствительность индукционных зондов с моментами, перпендикулярными оси скважины, к эксцентричности очень различна, в зависимости от того, имеется ли эксцентричность в направлении магнитного момента или перпендикулярно магнитному моменту. Патент США №6556015, выданный Omeragic и др., описывает способы уменьшения влияния скважины на индукционные измерения с поперечными катушками посредством механического или электромагнитного вращения устройства вокруг его оси. Однако все же существует потребность в лучших способах корректирования влияния скважины, которые могут использоваться для инструментов с поперечным зондом.
Сущность изобретения
Один аспект изобретения относится к способам моделирования влияния скважины на данные устройства индукционного каротажа, имеющего множество зондов, которое содержит, по меньшей мере, один поперечный зонд. Способ в соответствии с одним вариантом осуществления изобретения содержит этап выбора модели пласт-скважина, имеющей набор параметров, при этом набор параметров содержит направление эксцентричности устройства, определение начальных значений для набора параметров; расчет ожидаемых характеристик для выбранного набора зондов из множества зондов устройства индукционного каротажа, при этом вычисление основывается на модели пласт-скважина, сравнение ожидаемых характеристик с действительными характеристиками для выбранного набора зондов, корректирование значений набора параметров, если разница между ожидаемыми характеристиками и действительными характеристиками не меньше, чем значение предварительно определенного критерия; повторение вычислений, сравнение и регулирование, пока разница между ожидаемыми характеристиками и действительными характеристиками не станет меньше, чем предварительно определенное значение критерия, определение влияний скважины из окончательных величин набора параметров.
Другой аспект изобретения относится к системам моделирования влияния скважины на данные устройства индукционного каротажа, имеющего множество зондов, которое включает, по меньшей мере, один поперечный зонд. Система в соответствии с одним вариантом осуществления изобретения содержит процессор и запоминающее устройство, при этом запоминающее устройство хранит программу, содержащую команды для следующих действий: выбор модели пласт-скважина, имеющей набор параметров, при этом набор параметров содержит направление эксцентрирования устройства; определение начальных значений для набора параметров; вычисление ожидаемых характеристик для выбранного набора зондов из множества зондов устройства индукционного каротажа, при этом вычисление основано на модели пласт-скважина; сравнение ожидаемых характеристик с реальными характеристиками для выбранного набора зондов; регулирование значений набора параметров, если разница между ожидаемыми характеристиками и реальными характеристиками не меньше, чем предварительно определенное значение критерия; повторение вычислений, сравнение и корректирование, пока разница между ожидаемыми характеристиками и реальными характеристиками не станет меньше, чем предварительно определенное значение критерия, определение влияний скважины из окончательных величин набора параметров.
Другие аспекты и преимущества изобретения станут очевидны из следующего описания и прилагаемой формулы.
Краткое описание чертежей
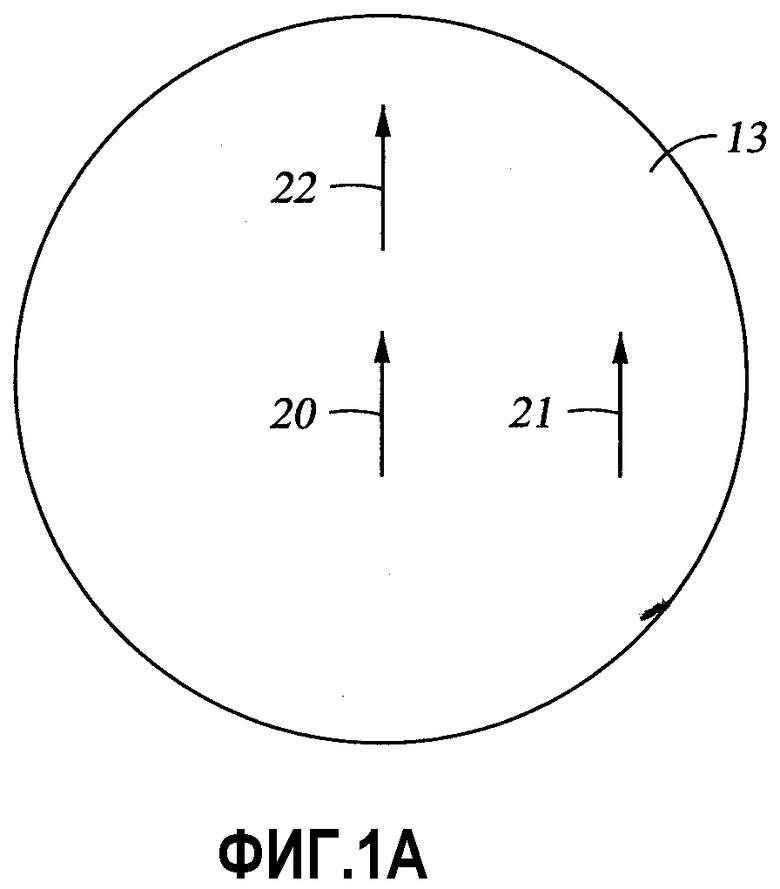
Фиг.1А и 1В, соответственно, иллюстрируют эксцентричность устройства с поперечным зондом и асимметричным распределением тока, что обуславливает нежелательные влияния скважины на данные каротажа.
Фиг.2 представляет сравнение влияний эксцентричности в двух различных направлениях поперечного индукционного зонда в изоляционной оплетке.
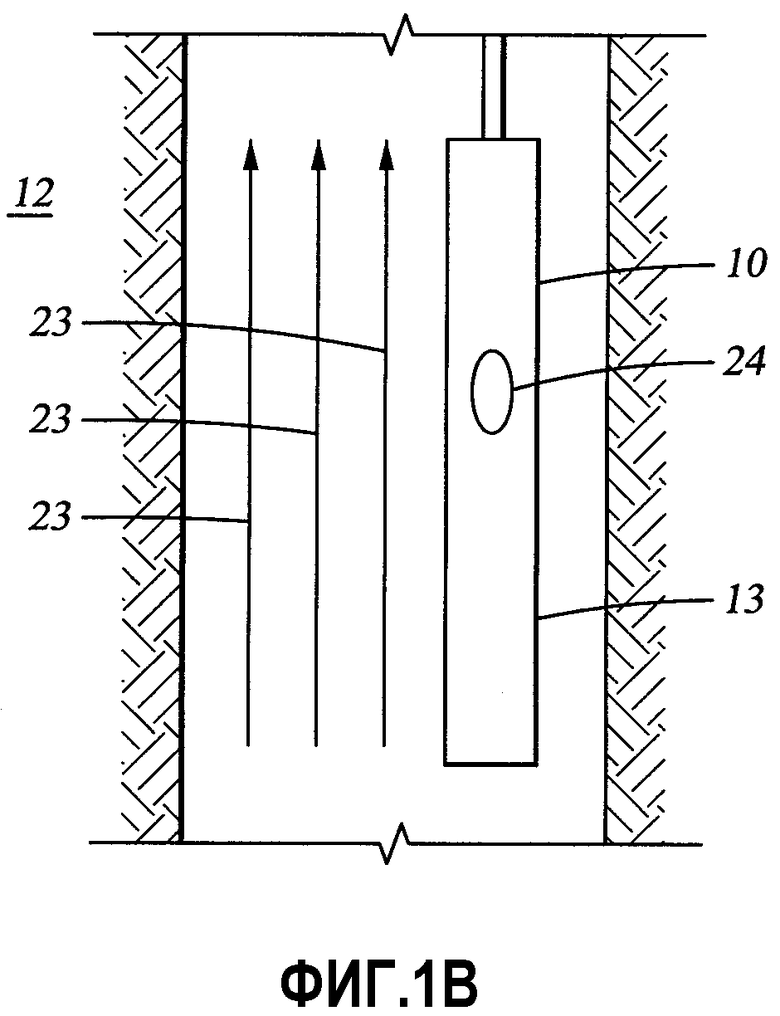
Фиг.3 представляет влияния остаточной эксцентричности в двух различных направлениях поперечного индукционного зонда на проводящую оправку.
Фиг.4 иллюстрирует схему трехмерного индукционного зонда, представляя систему координат устройства.
Фиг.5 представляет влияния остаточной эксцентричности перекрестных соединений устройства трехмерного индукционного каротажа.
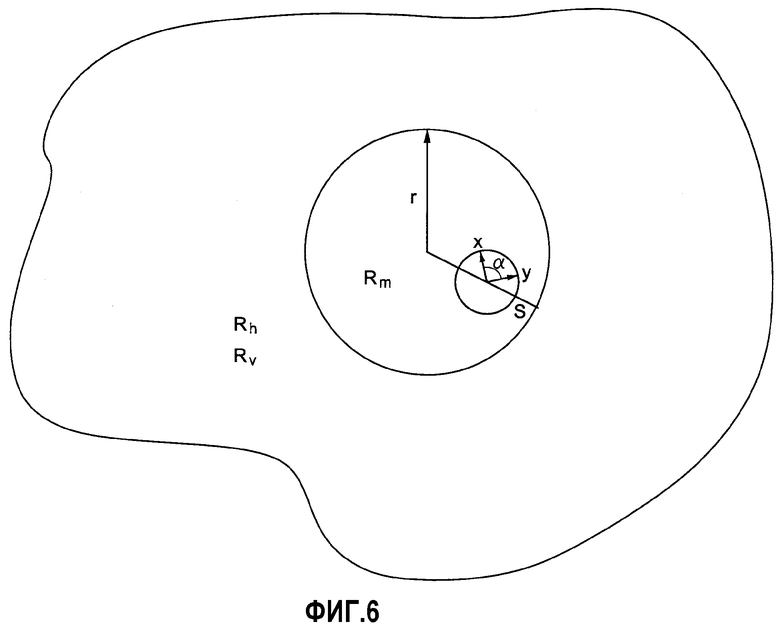
Фиг.6 представляет параметрическую модель для внесения поправок на влияния скважины для трехмерного индукционного зонда в соответствии с одним вариантом осуществления изобретения.
Фиг.7 представляет многозондовое устройство трехмерного индукционного каротажа, имеющее трехмерный передатчик, 3 осевых зонда приемника и 6 трехмерных зондов приемника.
Фиг.8 представляет способ внесения поправок на влияние скважины в соответствии с одним вариантом осуществления изобретения.
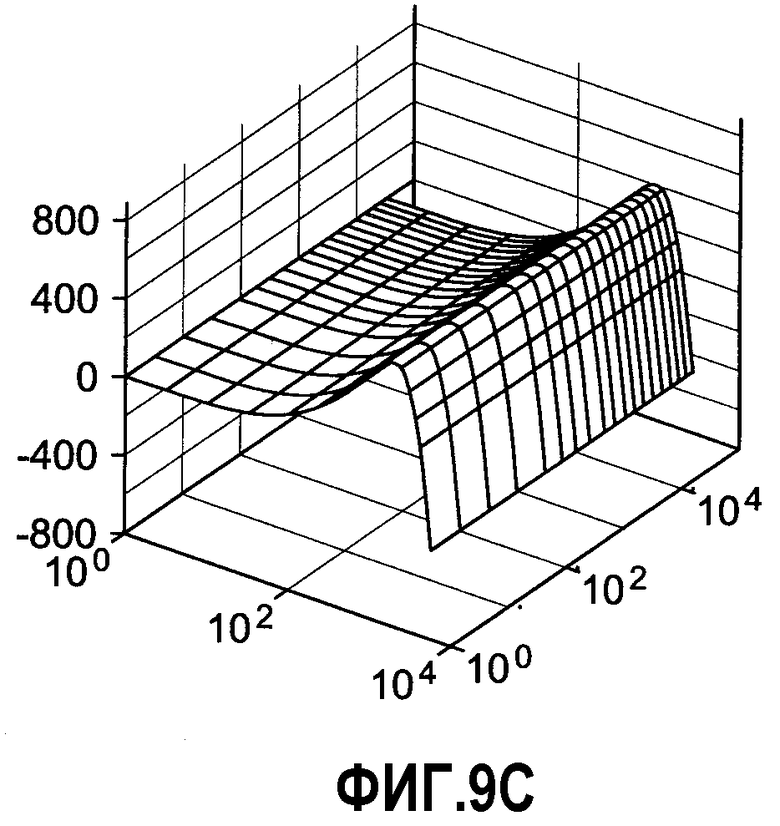
Фиг.9А, 9В и 9С иллюстрируют применение способа изобретения для внесения поправок на влияния скважины.
Фиг.10 иллюстрирует компьютер из уровня техники, который может использоваться с вариантами осуществления изобретения.
Подробное описание
Варианты осуществления изобретения относятся к способам и системам для внесения поправок на влияния скважины в устройства индукционного каротажа, имеющие поперечные или трехмерные антенны. Способы согласно изобретению применимы как к устройствам индукционного каротажа, так и к устройствам распространения. Поскольку различие между устройством индукционного каротажа и устройством распространения не существенно в данном изобретении, термин «устройство индукционного каротажа» используется в этом описании так, что включает как устройства индукционного каротажа, так и устройства распространения. Аналогично, влияния скважины и влияния эксцентричности устройства (или влияния эксцентричности) используются взаимозаменяемо в этом описании, потому что различие между ними не существенно. Для любого специалиста в данной области будет значимым тот факт, что проводимость обратно пропорциональна удельному сопротивлению, и, следовательно, любая ссылка на «проводимость» в этом описании, как предполагается, подразумевает и обратную ей величину, «удельное сопротивление», и наоборот.
Как отмечено выше, индукционные зонды с магнитными моментами, перпендикулярными (т.е. поперечными) оси скважины, являются более чувствительными к влияниям скважины. Кроме того, чувствительность поперечной катушки к эксцентричности очень различна, в зависимости от того, имеется ли эксцентричность в направлении магнитного момента или перпендикулярно магнитному моменту. В этом описании поперечный зонд используется в широком смысле, включая любой зонд, имеющий поперечную компоненту в его магнитном моменте. Например, зонд, имеющий наклонную катушку (т.е. катушку, не параллельную или перпендикулярную оси устройства), будет иметь поперечную компоненту в его магнитном моменте и, следовательно, может называться поперечным зондом в этом описании. Аналогично, трехмерный зонд является частным случаем поперечного зонда.
Фиг.1А показывает, что каротажное устройство может иметь поперечную или наклонную магнитно-дипольную антенну (TMD), расположенную в центре (показан как 20) скважины 13 или эксцентрированную в параллельном направлении (показано как 22) или перпендикулярном направлении (показано как 21). Параллельное или перпендикулярное направление рассматривается относительно направления магнитного диполя антенны. Параллельное эксцентрирование 22 создает вихревые токи вверх и вниз по скважине. Однако из-за асимметрии не создается полного тока вверх или вниз по скважине. Таким образом, устройство, имеющее антенну TMD, эксцентрированную в параллельном направлении 22, не создает нежелательных влияний больше, чем устройство, имеющее антенну TMD точно в центре 20 скважины. В отличие от этого устройство, имеющее антенну TMD, эксцентрированную в перпендикулярном направлении 21, индуцирует вихревые токи, которые текут в направлении вверх и вниз по скважине, но без симметрии, которая бы уравновесила, взаимно уничтожив, токи вверх и вниз. В результате эксцентрирование в перпендикулярном направлении 21 вызывает значительные токи 23 в скважине, как показано на Фиг.1 В. Электрический ток в пласте является также асимметричным в этом случае. Асимметричное распределение тока создает сильный сигнал в приемнике 24, расположенном на устройстве 10 для метода сопротивлений.
Перпендикулярное эксцентрирование 21 и параллельное эксцентрирование 22, показанные на Фиг.1а, иллюстрируют предельные расположения устройства от центра 20 скважины. В типичном случае эксцентрирование с большой вероятностью соответствует промежуточному между этими крайними расположениями, т.е. это эксцентрирование в направлении, которое является комбинацией как х, так и y направлений.
Фиг.2. иллюстрирует влияния эксцентричности устройства индукционного каротажа. Приведенные кривые характеризуют устройство, имеющее изоляционную оплетку, расположенную в скважине диаметром 7,9”. Проводимость бурового раствора (σm) равна 5,1 См/м, а проводимость пласта (σf) равна 0,061 См/м. Как показано, кривая xx представляет эксцентричность устройства в x-направлении (направление магнитного момента). Эта ситуация показана как 22 на Фиг.1а. Как отмечено выше, эксцентричность в направлении, параллельном с направлением магнитного момента, обуславливает минимальные влияния скважины. Так, кривая хх является по существу плоской как функция эксцентриситета. В отличие от этого, кривая yy, которая изображает эксцентричность в направлении, перпендикулярном направлению магнитного момента (показано как 21 на Фиг.1а), является очень чувствительной к расстояниям эксцентрирования. Как показано на Фиг.2, влияния эксцентрирования в направлении, перпендикулярном направлению магнитного момента катушки (кривая yy) могут быть на два порядка по величине сильнее, чем влияния эксцентрирования в направлении, параллельном с магнитным моментом (кривая хх).
Необычная чувствительность к эксцентриситету в направлении, перпендикулярном магнитному моменту, может быть уменьшена путем включения проводящего элемента в изоляционную оплетку, как раскрыто в Патенте США №6573722, выданном Rosthal и др. Однако включение проводящего элемента в изоляционную оплетку не полностью устраняет дифференциальные влияния. Как показано на Фиг.3, влияния эксцентриситета в направлении, перпендикулярном направлению магнитного момента (кривая yy) все же более значительны, чем влияния эксцентриситета в направлении, параллельном направлению магнитного момента (кривая хх), хотя они одного порядка величины. Кривые, показанные на Фиг.3, относятся к устройству, имеющему проводящую оправку, расположенную в скважине диаметром 7,9”(дюймов). Проводимость бурового раствора (σm) равна 5,1 См/м, а проводимость пласта (σf) равна 0,061 См/м.
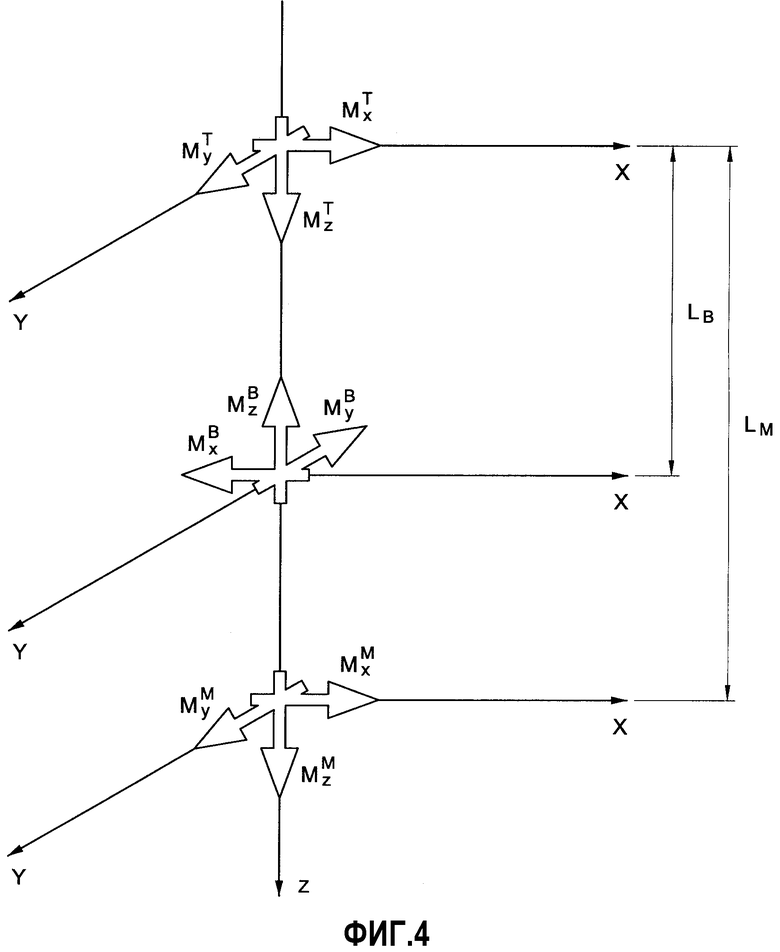
Наиболее общая схема устройства индукционного каротажа, имеющего поперечные катушки, представляет собой трехмерный зонд, как показано на Фиг.4. Фиг.4 иллюстрирует, что трехмерный зонд состоит из триады передатчиков, установленных ортогонально, и триады приемников на расстоянии Lm, установленных, по существу, в тех же ортогональных направлениях, как и катушки передатчика. На Фиг.4 триада передатчиков показана как имеющих магнитные моменты Mx T, My T, Mz T, в то время как триада приемников показана, как имеющих магнитные моменты Mx M, My M, Mz M. Такая компоновка называется двухтриадным зондом. Такой зонд не является полезным в реальном каротаже, потому что непосредственная связь между i-м передатчиком и i-м приемником (i=1, 2, 3) являются гораздо существеннее, чем любой сигнал от пласта. Неблагоприятное влияние взаимных связей может быть уменьшено путем, аналогичным обычному аксиальному индукционному зонду, посредством установки триады ортогональных приемников между основными триадами приемников и передатчиков. Эта дополнительная триада называется балансирующей триадой (или триадой противодействия). На Фиг.4 балансирующая триада показана на расстоянии LB от триады передатчиков, имеющей магнитные моменты Mx B, My B, Mz B. Число витков в каждой катушке балансирующей триады подобрано так, что в воздухе сумма напряжений, детектируемых основной и балансирующей триадами, равна нулю. То есть

где  - это напряжение, индуцируемое в i-ом основном приемнике i-ым передатчиком, а
- это напряжение, индуцируемое в i-ом основном приемнике i-ым передатчиком, а  - это напряжение, индуцируемое в i-ом балансирующем приемнике тем же самым i-ым передатчиком.
- это напряжение, индуцируемое в i-ом балансирующем приемнике тем же самым i-ым передатчиком.
Зонд, показанный на Фиг.4, создает девять соединений. Напряжения могут рассматриваться как матрица V:

где Vij - это напряжение, детектируемое j-ым приемником от активирования i-го передатчика. В зависимости от направления эксцентриситета каждый или некоторые из этих соединений могут подвергаться влияниям соответствующего эксцентриситета (влияния скважины), которые следует скорректировать.
В качестве примера Фиг.5 иллюстрирует влияния эксцентриситета связей xz, zx, yz и zy. Показанные кривые относятся к устройству, имеющему проводящий корпус зонда, размещенный в скважине диаметром 7,9” и эксцентрированный в направлении x. Проводимость бурового раствора (σm) равна s 5,1 См/м, а проводимость пласта (σf) равна 0,061 См/м. Когда устройство размещается вдоль направления x в круговой цилиндрической скважине, имеется только пять ненулевых связей, т.е. матрица V имеет вид:

Среди четырех связей, показанных на Фиг.5, только связи xz и zx подвергаются влиянию скважины, потому что связи yz и zy производят по существу нулевые сигналы, как показано в уравнении (4). С другой стороны, если эксцентрирование имеет место в направлении y, то связи yz и zy будут испытывать существенное влияние скважины, в то время как связи xz и zx не будут испытывать влияние скважины. На практике устройство с большой вероятностью эксцентрированo в направлении, которое является комбинацией направлений х и y. Следовательно, эти четыре связи, вероятно, все будут испытывать влияния скважины. Относительные величины влияния скважины для этих четырех связей зависят от направления реального эксцентрирования. Поэтому должно быть возможным определение направления эксцентpирования устройства на основе влияний скважины в этих четырех связях. Способ определения направления эксцентрирования на основе этих измерений будет описан позже. Кроме того, эти связи могут быть включены в процесс инверсии для обеспечения более точного определения направления эксцентрирования.
Влияние скважины/эксцентриситета в каждой связи трехмерного зонда может быть описано как параметрическая модель подобно осевым катушкам, описанным выше. Однако модель трехмерных зондов будет иметь дополнительные параметры. Прежде всего, поскольку влияние скважины зависит от направления эксцентрирования устройства, модель должна содержать отклонение от стенки скважины и его направление относительно оси х устройства (или оси y). Кроме того, поперечные зонды чувствительны к анизотропии пласта. Следовательно, согласно некоторым вариантам осуществления изобретения проводимость пласта в модели может содержать анизотропные составляющие. В этом случае модель пласт-скважина для калибровки трехмерного зонда содержит шесть параметров σm, σfh, σfh, r, s, и направление эксцентрирования α. Модель пласт-скважина, содержащая эти шесть параметров, представлена на Фиг.6. Для любого специалиста в данной области техники значимым является тот факт, что модель пласта для использования при калибровке трехмерного зонда может содержать больше или меньше, чем шесть параметров. Например, модель пласт-скважина для калибровки трехмерного зонда может дополнительно содержать наклонные углы, если пласт содержит наклонные плоскости или скважина имеет искривленный ствол. Аналогично, модель пласт-скважина для калибровки трехмерного зонда может содержать пять параметров: σm, σf, r, s, и направление эксцентрирования α, если пласт является изотропным.
Предпочтительное трехмерное устройство индукционного каротажа может содержать трехмерный передатчик, несколько осевых приемных зондов и, по меньшей мере, один трехмерный приемный зонд. Например, Фиг.7. иллюстрирует один вариант осуществления трехмерного устройства индукционного каротажа, имеющего трехмерный передатчик, 3 осевых приемных зонда и 6 трехмерных приемных зонда. Данные от каждого из трех осевых зондов содержат следующие связи:

Каждый из трехмерных зондов на устройстве, показанном на Фиг.7, имеет 9 связей, как показано в уравнении (6).
Каждый или некоторые из этих связей могут испытывать влияния скважины/эксцентрирования, которые должны быть устранены до определения удельного сопротивления пласта из этих измерений.
Как отмечено выше, способ внесения поправок на влияние скважины для осевого зонда раскрыт в Патенте США №5041975, выданном Minerbo и Miles. Этот патент переуступлен правопреемнику настоящего изобретения и объединен посредством ссылки в его цельности. Согласно способу, раскрытому в этом патенте, модель пласта содержит четыре параметра: проводимость бурового раствора (σm), радиус скважины (r), величина отклонения от стенки скважины (s) и проводимость пласта (σf). Часто проводимость бурового раствора (σm) и отклонение (s) известны. Согласно способу, раскрытому в этом патенте, результаты измерений от четырех самых коротких зондов используются в процессе инверсии для определения параметров модели пласта.
Если этот способ распространяется на трехмерное устройство, показанное на Фиг.7, данные от 4 самых коротких зондов могут использоваться для вычисления параметров скважины. Альтернативно данные от других связей могут быть выбраны для включения в вычисления на основе желательных свойств. Например, связи xz и yz являются вполне направленными, следовательно, их включение в схему инверсии может обеспечить полезную информацию для определения направления эксцентрирования (α). Способ определения направления эксцентрирования (α) будет описан позже. Аналогично, связи xx и yy имеют хорошую чувствительность к вертикальной проводимости (σfv) и, следовательно, они могут быть включены в инверсию для обеспечения лучшей оценки вертикальной проводимости (σfv).
Фиг.8 представляет способ 80 согласно одному варианту осуществления изобретения. Прежде всего, выбирается модель пласт-скважина (например, та, которая показана на Фиг.6), и определяются (шаг 81) начальные оценочные значения параметров. Некоторые из этих параметров могут быть известны из других измерений. Например, проводимость бурового раствора (σm) может быть получена от датчика бурового раствора, а радиус скважины (r) может быть получен из измерений скважинным профиломером.
По этому способу затем вычисляется характеристики зонда в выбранной модели пласт-скважина (шаг 82). Вычисление может быть непосредственным решением уравнений Максвелла в рамках этой модели или может быть таблицей, построенной на основе такого решения. Таблица была бы построена так, чтобы охватывать достаточный диапазон всех шести параметров. Кроме того, для оценки характеристик в области значений, которые попадают между дискретными значениями параметров, могут использоваться методы интерполяции, такие как интерполяция Akima. Дается ссылка на работу Hiroshi Akima: “Bivariate Interpolation and Smooth Surface Fitting Based on Local Procedures,” (Алгоритм 474), Commun. ACM 17(1): 26-31 (1974).
Затем используются методы инверсии для сравнения и согласования вычисленных результатов с экспериментальными результатами (шаг 83). Этот шаг может использовать любой метод инверсии, известный из уровня техники. Инверсия устанавливает соответствие между вычисленными характеристиками и реальными характеристиками устройства путем поиска параметров в модели пласт-скважина, которые обеспечивают минимум штрафной функции ET или уменьшают штрафную функцию ET до уровня ниже величины выбранного критерия (ε). Различные штрафные функции могут использоваться для этой цели. Уравнение (7) представляет штрафную функцию минимальных квадратов, которая может использоваться в вариантах осуществления изобретения.

где ET - это трехмерная штрафная функция, σm - это проводимость скважины (бурового раствора); σfv и σfh - вертикальная и горизонтальная проводимости пласта, соответственно; r - радиус скважины; s - отклонение; α - направление эксцентрирования относительно системы координат устройства; i - индекс направленных связей; и j - индекс зондов. eij - вес, соответствующий каждой связи. N - это либо 3, либо 9, в зависимости от того, является ли приемник осевым или трехмерным. Заметим, что штрафная функция ET в уравнении (7) содержит суммирование по 4 зондам (j=1-4), поскольку используются данные от 4 самых коротких зондов. Для любого специалиста с ординарными навыками в данной области будет значимым тот факт, что точное число суммирований зависит от используемых данных измерений. Как отмечено выше, размер скважины (т.е. радиус скважины r) и проводимость скважины (бурового раствора) (σm) могут измеряться независимо. Например, радиус скважины (r) может определяться, используя скважинный профиломер, а проводимость бурового раствора (σm) определяется с помощью сенсора удельного сопротивления бурового раствора. Другие четыре (σfh, σfh, s, и α) параметра могут быть определены, используя метод инверсии и данные от 4 самых коротких зондов.
Процесс инверсии оптимизирует параметры для получения минимума штрафной функции ET или для получения штрафной функции ET ниже выбранного значения критерия (ε). Процесс оптимизации (шаг 87) является итеративным: если штрафная функция ET не ниже выбранного значения критерия ε, то затем параметры корректируются (шаг 84); характеристики непосредственной модели вычисляются заново (шаг 82); и вычисленные характеристики сравниваются с определенными характеристиками (шаг 83). Эти шаги (84, 82, 83) повторяются то тех пор, пока штрафная функция ET не достигнет минимума или будет ниже выбранного значения критерия ε.
Как только штрафная функция ET достигает минимума или ниже выбранного значения критерия ε, то оценочные (оптимизированные) параметры могут быть выданы и использоваться для внесения поправок на влияние скважины в других зондах (шаг 85). Конкретно, оптимизированные параметры скважины используются для вычисления влияния скважины (в терминах проводимости) для каждой связи в остальных зондах. Затем влияния скважины вычитаются из реальных результатов измерений (или проводимости, полученной из этих измерений) от каждой из этих связей/зондов для получения исправленных результатов измерений (или проводимостей).
Эти оптимизированные параметры могут также использоваться для вычисления других параметров, таких как отклонение устройства от стенки скважины в направлениях х и y (шаг 86).
Фиг.8 иллюстрирует способ согласно одному варианту осуществления изобретения. Для любого специалиста в данной области значимым будет тот факт, что модификации этого способа возможны без отступления за пределы объема правовой охраны изобретения. Например, могут использоваться другие штрафные функции. Кроме того, большее или меньшее число параметров могут определяться из других измерений и использоваться в вычислениях, описанных выше. Например, направление (угол α) эксцентрирования устройства может быть определено из данных измерений, которые будут описаны позже и использоваться в вычислении для сокращения числа параметров, которые должны оцениваться путем инверсии.
Применение способа (показанного на Фиг.8) в соответствии с одним вариантом осуществления показано на Фиг.9. Этот пример основан на изотропном пласте, т.е. σfv=σfh. Представленные графики являются характеристиками приемника для ряда моделей пласт-скважина с изменяющимися σfh и σm. Фиг.9А представляет ожидаемые характеристики зонда в скважине 5,0 дюйма для однородного пласта. Отклонение зонда составляет 0,125 дюйма и направление эксцентрирования составляет угол 67,5° с осью х. Фиг.9В представляет реальные характеристики этого зонда в скважине при тех же условиях. Сравнение между Фиг.9А и Фиг.9В показывает, что влияния скважины являются весьма существенными, когда буровой раствор является проводящим. Фиг.9С представляет скорректированные характеристики устройства, полученные путем внесения поправок на влияния скважины в характеристики, представленные на Фиг.9В. Внесение поправок на влияние скважины было выполнено, используя способ, аналогичный показанному на Фиг.8, за исключением того, что модель пласта является изотропной (σfv=σfh). Скорректированные данные, представленные на Фиг.9С, являются по существу такими же, как ожидаемые характеристики для однородного пласта, показанные на Фиг.9А, свидетельствуя об эффективности внесения поправок на влияние скважины согласно вариантам осуществления изобретения.
Как отмечалось выше, угол эксцентирования устройства (может быть определен независимо, оставляя только три неизвестных, которые должны определяться в уравнении (7). Направление смещения устройства в скважине может быть определено из полученных при измерениях трехмерных данных следующим образом. Матрица напряжений в уравнении (3) может быть преобразована в наблюдаемые проводимости:

путем деления напряжений Vij на коэффициенты чувствительности Kij, т.e.  Диагональные коэффициенты чувствительности Kxx, Kyy, Kzz выбираются так, что в однородной изотропной среде с низкой проводимостью диагональные проводимости σxx=σyy=σzz=σhom, где σhom - это проводимость однородного пласта, т.е.
Диагональные коэффициенты чувствительности Kxx, Kyy, Kzz выбираются так, что в однородной изотропной среде с низкой проводимостью диагональные проводимости σxx=σyy=σzz=σhom, где σhom - это проводимость однородного пласта, т.е.
Аналогично, внедиагональные коэффициенты чувствительности могут быть выбраны для упрощения преобразований вращения, например, Kyx=Kxy и Kxx=Kyy. Для особого случая вращения вокруг оси z матрица вращения представляет собой:

где ϕ - угол вращения. Влияние вращения на матрицу наблюдаемой проводимости может быть записано в виде:

Когда устройство эксцентрировано в направлении х в круговой скважине, матрица наблюдаемой проводимости имеет пять ненулевых составляющих, которые могут быть рассчитаны моделированием:

В системе координат вращения эта матрица имеет вид:
 (13)
(13)
Оценки угла (могут быть получены путем сравнения матрицы измерений от каждой трехмерной пары приемников с теоретической матрицей в уравнении (13). Например, сравнение между σxz и σyz дает:
Аналогично, сравнение между σzx и σzy дает:

Заметим, что измеренные составляющие проводимости используются в уравнениях (14-15). Другие оценки могут быть получены из σxx, σxy, σyx и σyy подобным же образом:

и

Уравнения (16) и (17) дают четыре угла, но только два из них физически различимы. Заметим, что ϕ в уравнениях (10, 13-17) - это то же самое, что и α на Фиг.(6). Чтобы учесть данные от нескольких трехмерных пар приемников, может осуществляться минимизация наименьших квадратов по всем ϕl, полученным в уравнениях (14-17) для определения угла ϕ. После того, как определен угол ϕ, поправки на влияние скважины могут затем применяться к данным, используя вычисленные значения в уравнении (12). Скорректированная матрица наблюдаемой проводимости затем вращается в обратном порядке к исходным координатам устройства следующим образом:
 (18)
(18)
Некоторые варианты осуществления изобретения относятся к системам реализации вышеописанных способов для внесения поправок на влияния скважины в данные трехмерных зондов. Система согласно вариантам осуществления изобретения может быть реализована на отдельно стоящем компьютере или размещенном в скважине компьютере, который включен в устройство. Фиг.10 представляет основной целевой компьютер, который может использоваться с вариантами осуществления изобретения.
Как показано на Фиг.10, основная компьютерная система может содержать главный блок 160, дисплей 162 и устройства ввода, такие как клавиатура 168 и мышь. Главный блок 160 может содержать блок 164 центрального процессора, постоянное запоминающее устройство (например, жесткий диск) 163 и запоминающее устройство 166 с произвольной выборкой. Запоминающее устройство 163 может содержать программу, которая содержит инструкции для осуществления способов изобретения. Программа может осуществляться на любой восстановимой среде компьютера, такой как жесткий диск, дискета, CD-ROM или любая другая среда, известная или которая еще будет разработана. Разработка программного обеспечения может выполняться на любом языке программирования, и команды могут быть в форме исходных кодов, которым может потребоваться компиляция прежде, чем компьютер сможет выполнить эти команды, или в компилированных (двоичных) или полукомпилированных кодах. Точная форма и среда для этой программы не являются существенными для изобретения и не должны ограничивать объем правовой охраны изобретения.
Хотя изобретения было описано по отношению к ограниченному числу вариантов осуществления, специалисты в данной области, использующие это раскрытие, оценят, что могут быть разработаны другие варианты осуществления, которые не выходят за пределы объема правовой охраны изобретения, как оно раскрыто здесь. Соответственно, объем правовой охраны должен ограничиваться только приложенной формулой изобретения.






Изобретение относится к индукционному каротажу. Сущность: выбирают модель пласт-скважина, имеющую набор параметров. Набор параметров содержит направление эксцентрирования устройства. Определяют начальные значения для набора параметров. Вычисляют ожидаемые характеристики для выбранного набора зондов из множества зондов индукционного устройства. Вычисление основывается на модели пласт-скважина. Сравнивают ожидаемые характеристики с реальными характеристиками для выбранного набора зондов. Корректируют значения набора параметров, если разница между ожидаемыми характеристиками и реальными характеристиками не меньше, чем предварительно определенное значение критерия. Повторяют вычисление, сравнение и корректировку, пока разница между ожидаемыми характеристиками и реальными характеристиками не станет меньше, чем предварительно определенное значения критерия. Определяют влияние скважины из окончательных значений набора параметров. Технический результат: улучшение корректирования влияния скважины при использовании для инструментов с поперечным зондом. 2 н. и 21 з.п. ф-лы, 10 ил.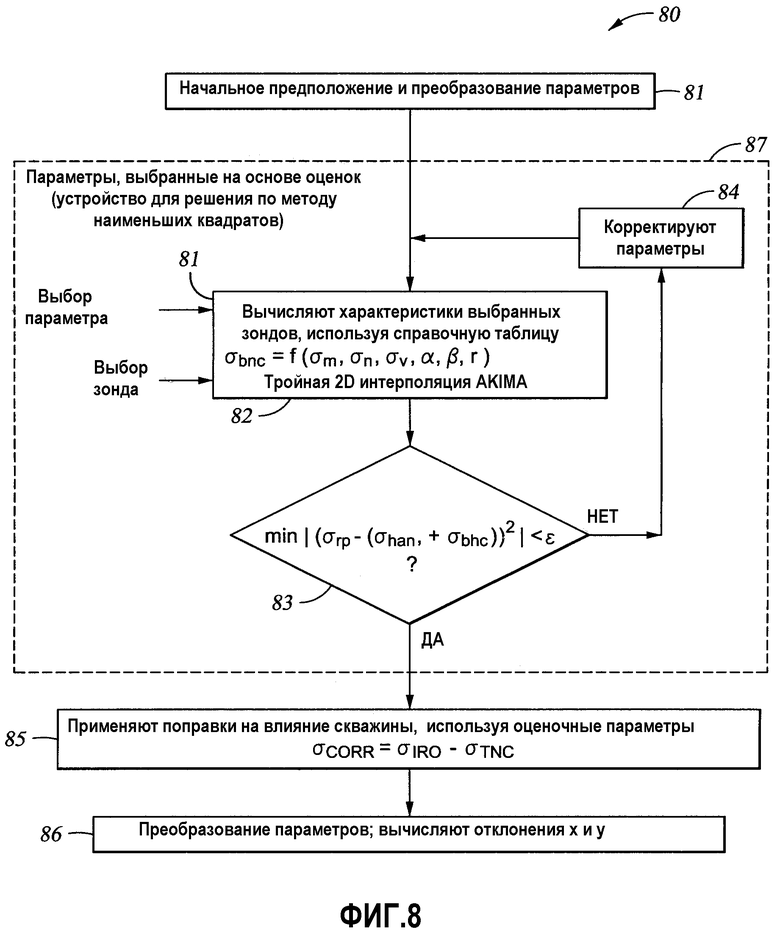
1. Способ для моделирования влияния скважины на данные устройства индукционного каротажа, имеющего множество зондов, которое содержит, по меньшей мере, один поперечный зонд, содержащий следующие этапы:
осуществляют каротаж скважины с помощью устройства индукционного каротажа и принимают характеристики, по меньшей мере, от одного зонда, выбирают модель пласта-скважины, имеющую набор параметров, при этом этот набор параметров содержит направление эксцентрирования устройства;
определяют начальные значения для набора параметров;
вычисляют ожидаемые характеристики для выбранного набора зондов из множества зондов устройства индукционного каротажа, при этом вычисление основывается на модели пласт-скважина;
сравнивают ожидаемые характеристики с реальными характеристиками для выбранного набора зондов;
корректируют значения набора параметров, если разница между ожидаемыми характеристиками и реальными характеристиками не менее, чем предварительно определенное значение критерия;
повторяют вычисления, сравнение и корректировку, пока разница между ожидаемыми характеристиками и реальными характеристиками не станет меньше, чем предварительно определенное значение критерия;
определяют влияния скважины из окончательных значений набора параметров.
2. Способ по п.1, отличающийся тем, что набор параметров дополнительно содержит вертикальную проводимость пласта и горизонтальную проводимость пласта.
3. Способ по п.2, отличающийся тем, что набор параметров дополнительно содержит удельное сопротивление бурового раствора, диаметр скважины и отклонение устройства от стенки скважины.
4. Способ по п.1, отличающийся тем, что начальные значения набора параметров содержат, по меньшей мере, одно значение, определенное из данных каротажного исследования скважины.
5. Способ по п.4, отличающийся тем, что, по меньшей мере, одно значение выбирается из удельнного сопротивление бурового раствора и диаметра скважины.
6. Способ по п.5, отличающийся тем, что удельное сопротивление бурового раствора определяется посредством датчика удельного сопротивления бурового раствора, а диаметр скважины определяется посредством скважинного профиломера.
7. Способ по п.1, отличающийся тем, что сравнение включает в себя использование штрафной функции.
8. Способ по п.7, отличающийся тем, что штрафная функция основана на квадратах разностей между ожидаемыми характеристиками и реальными характеристиками.
9. Способ по п.1, дополнительно содержащий корректирующие измерения множества зондов, используя определенные влияния скважины.
10. Способ по п.1, отличающийся тем, что устройство индукционного каротажа содержит, по меньшей мере, один трехмерный зонд.
11. Способ по п.10, отличающийся тем, что начальные значения для набора параметров содержат направление эксцентрирования устройства, определенное из данных, полученных с помощью, по меньшей мере, одного трехмерного зонда.
12. Способ по п.11, отличающийся тем, что направление эксцентрирования определяется из внедиагональных элементов матрицы наблюдаемой проводимости.
13. Способ по п.12, отличающийся тем, что матрица наблюдаемой проводимости вращается для образования упрощенной матрицы наблюдаемых проводимостей.
14. Способ по п.13, отличающийся тем, что поправки на влияние скважины применяются к упрощенной матрице наблюдаемых проводимостей для образования скорректированной матрицы наблюдаемых проводимостей.
15. Способ по п.14, дополнительно содержащий вращение скорректированной матрицы наблюдаемых проводимостей для обеспечения соответствия начальной ориентации устройства.
16. Система для моделирования влияния скважины на данные устройства индукционного каротажа, имеющего множество зондов, которое включает в себя, по меньшей мере, один поперечный зонд, причем эта система содержит устройство индукционного каротажа, имеющее поперечные катушки, процессор и запоминающее устройство, при этом запоминающее устройство хранит программу с командами для выполнения следующих этапов:
выбирают модель пласта-скважины, имеющую набор параметров, при этом этот набор параметров содержит направление эксцентрирования устройства;
определяют начальные значения для набора параметров;
вычисляют ожидаемые характеристики для выбранного набора зондов из множества зондов устройства индукционного каротажа, при этом вычисление основывается на модели пласт-скважина;
сравнивают ожидаемые характеристики с реальными характеристиками для выбранного набора зондов;
корректируют значения набора параметров, если разница между ожидаемыми характеристиками и реальными характеристиками не менее, чем предварительно определенное значение критерия;
повторяют вычисление, сравнение и корректировку, пока разница между ожидаемыми характеристиками и реальными характеристиками не станет меньше, чем предварительно определенное значение критерия;
определяют влияния скважины из окончательных значений набора параметров.
17. Система по п.16, отличающаяся тем, что набор параметров дополнительно содержит вертикальную проводимость пласта и горизонтальную проводимость пласта.
18. Система по п.17, отличающаяся тем, что набор параметров дополнительно содержит удельное сопротивление бурового раствора, диаметр скважины и отклонение устройства от стенки скважины.
19. Система по п.16, отличающаяся тем, что сравнение содержит использование штрафной функции.
20. Система по п.19, отличающаяся тем, что штрафная функция основана на квадратах разностей между ожидаемыми характеристиками и реальными характеристиками.
21. Система по п.16, отличающаяся тем, что программа дополнительно содержит команды для корректирующих измерений множества зондов, используя определенные влияния скважины.
22. Система по п.16, отличающаяся тем, что поперечные катушки включены в трехмерный зонд, указанный трехмерный зонд состоит из триады катушек передатчиков, установленных ортогонально, и триады катушек приемников на расстоянии Lm, установленных, по существу, в тех же ортогональных направлениях, как и катушки передатчиков.
23. Система по п.22, отличающаяся тем, что дополнительно содержит балансирующую триаду.
| US 5041975 A, 20.08.1991 | |||
| US 6556015 B1, 29.04.2003 | |||
| RU 2001134208 A, 10.09.2003. |

