Область техники, к которой относится изобретение
Настоящее изобретение относится к детектору движения тела, предназначенному для детектирования движения тела, когда он закреплен на теле, более конкретно к шагомеру, который позволяет подсчитывать количество шагов, детектируя движение тела.
Уровень техники
Шагомер, предназначенный для детектирования движения тела, когда он закреплен на теле, и подсчитывающий количество шагов на основе информации детектируемого движения тела, является общеизвестным. В шагомере модуль детектирования движения тела, предназначенный для детектирования движения тела, установлен внутри корпуса устройства. Используются различные типы модулей детектирования движения тела, в одном из которых используется модуль датчика, включающий в себя элемент в форме пластины консольной структуры и пьезоэлектрический элемент, установленный на элементе в форме пластины, используемый в качестве модуля детектирования движения тела. В модуле детектирования движения тела такой конфигурации в пьезоэлектрическом элементе возникает деформация, когда элемент в форме пластины изгибается при движении тела, и движение тела детектируется путем определения флуктуаций напряжения, связанных с такой деформацией. Документы, раскрывающие шагомер, оборудованный модулем детектирования движения тела описанной выше конфигурации, включают в себя публикацию выложенного японского патента №2002-191580 (патентный документ 1).
В модуле детектирования движения тела описанной выше конфигурации присутствует ось детектирования, на которой получают максимальную чувствительность. Ось детектирования продолжается в одном направлении, и направление, в котором продолжается ось детектирования (ниже называется направлением оси детектирования), совпадает с нормальным направлением основной поверхности балочной части (то есть части, которая изгибается при движении тела) элемента в форме пластины, на котором закреплен пьезоэлектрический элемент. В модуле детектирования движения тела упомянутой выше конфигурации, если угол наклона от оси детектирования находится в пределах заданного угла, также детектируется движение тела в соответствующем направлении, но если направление движения тела значительно отклоняется от направления оси детектирования, балочная часть элемента в форме пластины изгибается недостаточно, в результате чего возникает недостаточная деформация пьезоэлектрического элемента, и движение тела иногда может не быть зафиксировано. Обычно диапазон детектирования, в котором может быть выполнено детектирование используемым на практике модулем детектирования движения тела описанной выше конфигурации, находится в пределах диапазона угла наклона от направления оси детектирования, который составляет приблизительно 30°. Поэтому состояние крепления шагомера, когда он надет на тело пользователя, становится очень важным при подсчете количества шагов с удовлетворительной точностью.
Когда шагомер закрепляют на теле, его обычно закрепляют на талии пользователя. В частности, на корпусе устройства шагомера предусмотрена часть зажима, и корпус устройства закрепляют на верхнем краю одежды, таком как штаны и юбка, используя такую часть зажима, или корпус устройства закрепляют на верхнем краю ремня, надетого на талию. В результате модуль детектирования движения тела располагают и закрепляют относительно корпуса устройства таким образом, чтобы направление оси детектирования модуля детектирования движения тела накладывалось в перпендикулярном направлении, когда шагомер закреплен на теле таким образом.
Однако, если пользователь является человеком, нижняя часть живота которого выпирает вперед, как можно видеть у многих взрослых мужчин или у беременных женщин, направление оси детектирования модуля детектирования движения тела иногда значительно наклоняется относительно перпендикулярного направления, когда сам корпус тела значительно наклонен даже при правильном состоянии крепления. В этом случае движение тела не детектируется с удовлетворительной точностью и количество шагов может быть подсчитано неточно, независимо от правильного состояния крепления.
Документы, раскрывающие методику, позволяющую предотвратить снижение точности измерения из-за вариаций состояния крепления, связанных с формой тела пользователя, включают в себя выложенную публикацию японского патента №2001-255169 (патентный документ 2), выложенную публикацию японского патента № 2003-156362 (патентный документ 3), выложенную публикацию японского патента №2003-157423 (патентный документ 4) и т.п. Обе методики, раскрытые в патентных документах 2 и 3, выполнены с использованием механизма поворота, который установлен на опорной части модуля детектирования движения тела таким образом, что направление оси детектирования модуля детектирования движения тела всегда направлено в перпендикулярном направлении благодаря регулировке барицентрического положения участка поворота. Методика, раскрытая в патентном документе 4, направлена на форму балочной части элемента в форме пластины, который сформирован с приданием ему специальной формы (например, кольцевой формы, S-образной формы, C-образной формы, формы спирали, формы креста и т.п.) в двух измерениях таким образом, что направление оси детектирования представляет собой не только одно направление, но и множество направлений.
Документы, в которых раскрыта методика, позволяющая детектировать движение тела в произвольном направлении, включают в себя публикацию выложенного японского патента №61-162935 (патентный документ 5). Методика, раскрытая в патентном документе 5, выполнена с возможностью детектирования не только движения в перпендикулярном направлении, но также и движения в произвольном направлении благодаря креплению на тонкой пластине, имеющей консольную структуру, пьезоэлектрического элемента в состоянии, заранее наклоненном под углом 45° от горизонтальной плоскости.
[Патентный документ 1] публикация выложенного японского патента №2002-191580
[Патентный документ 2] публикация выложенного японского патента №2001-255169
[Патентный документ 3] публикация выложенного японского патента №2003-156362
[Патентный документ 4] публикация выложенного японского патента №2003-157423
[Патентный документ 5] публикация выложенного японского патента №61-162935
Сущность изобретения
ЗАДАЧИ, РЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
Однако, когда используют методики, раскрытые в патентных документах 2-4, модуль детектирования движения тела становится чрезвычайно большим, и шагомер вместе с ним также становится очень большим. Важно обеспечить точный подсчет шагомером количества шагов, но также важно миниатюризировать устройство, чтобы сделать его удобным для ношения во время использования с закреплением его на теле, и такое увеличение модуля детектирования движения тела необходимо исключить. Кроме того, когда используют методики, раскрытые в патентных документах 2-4, усложняется конфигурация устройства, таким образом производство становится трудоемким и увеличиваются затраты на производство.
Для того чтобы фактически обеспечить возможность детектирования движения тела в произвольном направлении, используя методики, раскрытые в патентном документе 5, динамической диапазон модуля детектирования движения тела необходимо увеличить таким образом, чтобы также можно было детектировать движение тела в направлении, сильно отклоняющемся от направления оси детектирования. При этом компонент шумов, содержащихся в сигнале, выводимом датчиком, должен быть эффективно понижен, и коэффициент усиления сигнала необходимо значительно увеличить для реализации модуля детектирования движения тела с большим динамическим диапазоном, в результате чего значительно повышаются затраты на производство.
Учитывая возможность решения описанных выше задач, цель настоящего изобретения состоит в создании компактного и недорогостоящего детектора движения тела, в котором предотвращается снижение точности измерения в результате вариации состояния крепления в связи с формой тела пользователя.
СРЕДСТВО РЕШЕНИЯ ЗАДАЧ
Детектор движения тела в соответствии с первым аспектом настоящего изобретения включает в себя первый модуль детектирования движения тела, закрепленный на теле и выполненный с возможностью детектирования движения тела в заранее определенном направлении оси детектирования, и корпус устройства, вмещающий первый модуль детектирования движения тела. Ось детектирования первого модуля детектирования движения тела расположена с наклоном под первым углом наклона относительно поверхности крепления к телу корпуса устройства; и первый угол наклона находится в пределах диапазона углов детектирования первого модуля детектирования движения тела.
Здесь “ось детектирования модуля детектирования движения тела” относится к оси, которая совпадает с направлением, в котором возможно детектирование с максимальной чувствительностью модуля детектирования движения тела, и “диапазон углов детектирования модуля детектирования движения тела” обозначает диапазон угла наклона от оси детектирования, под которым возможно детектирование вибрации, выполняемое модулем детектирования движения тела. Таким образом, обычно получается одинаковый диапазон углов детектирования с обеих сторон от оси детектирования.
Поэтому движение тела можно детектировать в большом количестве случаев, даже когда состояние крепления изменяется из-за формы тела пользователя, благодаря заранее выполненному наклону оси детектирования модуля детектирования движения тела относительно поверхности крепления. Если угол наклона относительно поверхности крепления оси детектирования находится в пределах диапазона углов детектирования, движение тела может надежно детектироваться даже если поверхность крепления будет выполнена таким образом, что она располагается вдоль перпендикулярного направления.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, ось детектирования первого модуля детектирования движения тела, предпочтительно, расположена таким образом, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
В детекторе движения тела, в котором осуществляется крепление корпуса устройства на поясе, ось детектирования модуля детектирования движения тела расположена под наклоном таким образом, чтобы становиться ближе к стороне живота пользователя в направлении верхней части в состоянии крепления в соответствии с описанной выше конфигурацией. Поэтому движение тела можно точно детектировать даже у человека, нижняя часть живота которого выступает вперед, у беременных женщин и т.п.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, первый модуль детектирования движения тела, предпочтительно, включает в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент, прикрепленный к основной поверхности балочной части элемента в форме пластины.
В результате получается компактный модуль детектирования движения тела с простой конфигурацией благодаря использованию модуля детектирования движения тела с элементом в форме пластины, имеющим балочную часть, и пьезоэлектрический элемент, прикрепленный к балочной части, что способствует таким образом миниатюризации устройства.
В детекторе движения тела на основе первого аспекта настоящего изобретения первый модуль детектирования движения тела, предпочтительно, закреплен на подложке для прокладки электрических проводов, которая установлена и закреплена внутри корпуса устройства. Предпочтительно, в этом случае основная поверхность балочной части расположена так, что она перпендикулярно пересекает основную поверхность подложки проводки; и основная поверхность подложки проводки расположена с наклоном под первым углом наклона относительно поверхности крепления корпуса устройства. Основная поверхность балочной части может быть расположена с наклоном под первым углом наклона относительно основной поверхности подложки проводки; и основная поверхность подложки проводки может быть расположена параллельно поверхности крепления корпуса устройства.
В соответствии с такой конфигурацией можно легко и удобно получить компактный детектор движения тела, в котором ось детектирования модуля детектирования движения тела расположена под наклоном относительно поверхности крепления.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, балочная часть может включать в себя часть груза, расположенную стоящей от конца на стороне подложки проводки балочной части; в этом случае часть груза, предпочтительно, продолжается в направлении удаления от подложки проводки в направлении дистального конца.
В соответствии с такой конфигурацией, даже когда часть груза, которая способствует изгибу балочной части, расположена на балочной части, детектор движения тела может быть выполнен малым, так, что при этом исключается контакт части груза с подложкой проводки.
Детектор движения тела на основе первого аспекта настоящего изобретения, предпочтительно, выполнен так, что второй модуль детектирования движения тела закреплен и установлен так, чтобы детектировать движение тела в заданном направлении оси детектирования; и в этом случае ось детектирования второго модуля детектирования движения тела, предпочтительно, расположена с наклоном под вторым углом наклона, который больше, чем первый угол наклона, относительно поверхности крепления корпуса устройства. В этом случае второй угол наклона, предпочтительно, установлен таким образом, чтобы он не находился в пределах диапазона углов детектирования второго модуля детектирования движения тела; и предпочтительно, установлен так, что диапазон детектирования первого модуля детектирования движения тела и диапазон детектирования второго модуля детектирования движения тела, по меньшей мере, частично перекрываются.
Поэтому, в соответствии с конфигурацией размещения второго модуля детектирования движения тела, в дополнение к первому модулю детектирования движения тела, и установки диапазона детектирования второго модуля детектирования движения тела так, что он частично перекрывает диапазон детектирования первого модуля детектирования движения тела, движение тела можно детектировать в большем количестве случаев, даже когда состояние крепления изменяется из-за формы тела пользователя.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, ось детектирования второго модуля детектирования движения тела предпочтительно расположена так, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, второй модуль детектирования движения тела, предпочтительно, включает в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент, прикрепленный к основной поверхности балочной части элемента в форме пластины.
В детекторе движения тела, который основан на первом аспекте настоящего изобретения, предпочтительно дополнительно установлен модуль выбора, предназначенный для выбора того, какой выходной сигнал, выводимый модулем детектирования движения тела первого модуля детектирования движения тела и второго модуля детектирования движения тела, выбрать для цели детектирования движения тела.
В соответствии с такой конфигурацией, даже если одно и то же движение тела будет одновременно детектироваться как первым модулем детектирования движения тела, так и вторым модулем детектирования движения тела, детектирование движения тела выполняется специфично для выходного сигнала, выводимого из выбранного одного из модулей детектирования движения тела, и, таким образом, недостатки, которые могли бы возникнуть в результате частичного перекрытия диапазона детектирования первого модуля детектирования движения тела и диапазона детектирования второго модуля детектирования движения тела, заранее предотвращаются, и можно осуществлять точное и надежное детектирование движений тела.
Детектор движения тела, который основан на втором аспекте настоящего изобретения, включает в себя первый модуль детектирования движения тела и второй модуль детектирования движения тела, закрепленные и установленные таким образом, чтобы детектировать движение тела в заданном направлении оси детектирования, и корпус устройства, вмещающий первый модуль детектирования движения тела и второй модуль детектирования движения тела. Ось детектирования первого модуля детектирования движения тела расположена параллельно поверхности крепления к телу корпуса устройства; и ось детектирования второго модуля детектирования движения тела расположена с наклоном под углом наклона относительно поверхности крепления корпуса устройства. Угол наклона установлен так, чтобы он не находился в пределах диапазона углов детектирования второго модуля детектирования движения тела; и диапазон детектирования первого модуля детектирования движения тела и диапазон детектирования второго модуля детектирования движения тела, по меньшей мере, частично перекрываются.
Поэтому, в соответствии с конфигурацией размещения второго модуля детектирования движения тела в дополнение к первому модулю детектирования движения тела, расположения оси детектирования первого модуля детектирования движения тела параллельно поверхности прикрепления, расположения оси детектирования второго модуля детектирования движения тела под наклоном относительно поверхности крепления и установки диапазона детектирования второго модуля детектирования движения тела так, что он частично перекрывает диапазон детектирования первого модуля детектирования движения тела, обеспечивается возможность детектировать движение тела в большем количестве случаев, даже когда состояние крепления изменяется из-за формы тела пользователя. Поскольку ось детектирования первого модуля детектирования движения тела установлена так, что она располагается параллельно поверхности крепления, движение тела можно надежно детектировать, даже если поверхность крепления установлена так, что она расположена вдоль перпендикулярного направления.
В детекторе движения тела, который основан на втором аспекте настоящего изобретения, ось детектирования второго модуля детектирования движения тела, предпочтительно, расположена так, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
В детекторе движения тела, который основан на втором аспекте настоящего изобретения, первый модуль детектирования движения тела и второй модуль детектирования движения тела соответственно предпочтительно включают в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент, прикрепленный к основной поверхности балочной части элемента в форме пластины.
В детекторе движения тела, который основан на втором аспекте настоящего изобретения, первый модуль детектирования движения тела и второй модуль детектирования движения тела, предпочтительно, закреплены на подложке проводки, которая расположена и закреплена внутри корпуса устройства. Предпочтительно, в этом случае основная поверхность балочной части второго модуля детектирования движения тела располагается с наклоном под углом наклона относительно основной поверхности подложки проводки; и основная поверхность подложки проводки расположена параллельно поверхности крепления корпуса устройства.
В соответствии с такой конфигурацией может быть очень легко и удобно выполнен компактный детектор движения тела, в котором ось детектирования модуля детектирования движения тела расположена под наклоном относительно поверхности крепления.
В детекторе движения тела, который основан на втором аспекте настоящего изобретения, балочная часть второго модуля детектирования движения тела включает в себя часть груза, расположенную стоящей от конца балочной части на стороне подложки проводки; и в этом случае часть груза, предпочтительно, продолжается в направлении, в котором она удаляется от подложки проводки в направлении дистального конца.
В соответствии с такой конфигурацией, даже когда часть груза, которая способствует изгибу балочной части, расположена на балочной части второго модуля движения тела, детектор движения тела может быть выполнен малым, и при этом исключается контакт части груза с подложкой проводки.
В детекторе движения тела, который основан на втором аспекте настоящего изобретения, предпочтительно дополнительно установлен модуль выбора, предназначенный для выбора того, какой выходной сигнал, выводимый из модуля детектирования движения тела первого модуля детектирования движения тела и второго модуля детектирования движения тела, выбрать для цели детектирования движения тела.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением получают малый и недорогостоящий детектор движения тела, в котором предотвращается снижение точности измерения в результате вариации состояния крепления, которое соответствует форме тела пользователя.
Краткое описание чертежей
На фиг.1 схематично показан вид в перспективе положения, в котором шагомер в соответствии с первым вариантом воплощения настоящего изобретения находится в открытом состоянии.
На фиг.2 показан вид сбоку положения, в котором шагомер в соответствии с первым вариантом воплощения настоящего изобретения находится в открытом состоянии.
На фиг.3 схематично показан вид сбоку случая, когда шагомер в соответствии с первым вариантом воплощения настоящего изобретения находится в закрытом состоянии.
На фиг.4A схематично показан вид в перспективе печатной платы после сборки, представляющий структуру сборки печатной платы модуля датчика шагомера в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.4B показан вид спереди печатной платы после сборки, представляющий структуру сборки на печатной плате модуля датчика шагомера в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.4C показан вид сбоку печатной платы после сборки, представляющий структуру узла печатной платы модуля датчика шагомера в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.5 показана блок-схема, представляющая функциональные блоки шагомера в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.6 показан вид, представляющий состояние крепления, когда человек, нижняя часть живота которого не выступает вперед, закрепляет на теле шагомер в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.7 показан вид, схематично представляющий состояние наклона модуля датчика в положении крепления, показанном на фиг.6.
На фиг.8 показан вид, представляющий состояние крепления, когда человек, нижняя часть живота которого выступает вперед, закрепляет на теле шагомер в соответствии с первым вариантом воплощения настоящего изобретения.
На фиг.9 показан вид, схематично представляющий состояние наклона модуля датчика в положении крепления, показанном на фиг.8.
На фиг.10 схематично показан вид сбоку, когда шагомер в соответствии со вторым вариантом воплощения настоящего изобретения находится в закрытом состоянии.
На фиг.11A схематично показан вид в перспективе печатной платы после сборки, представляющий структуру сборки на печатной плате модуля датчика шагомера в соответствии со вторым вариантом воплощения настоящего изобретения.
На фиг.11B показан вид спереди печатной платы после сборки, представляющий структуру сборки на печатной плате модуля датчика шагомера в соответствии со вторым вариантом воплощения настоящего изобретения.
На фиг.11C показан вид сбоку печатной платы после сборки, представляющий структуру сборки на печатной плате модуля датчика шагомера в соответствии со вторым вариантом воплощения настоящего изобретения.
На фиг.12 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет на теле шагомер в соответствии со вторым вариантом воплощения настоящего изобретения.
На фиг.13 схематично показан вид, представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет на теле шагомер в соответствии со вторым вариантом воплощения настоящего изобретения.
На фиг.14 схематично показан вид сбоку, в случае, когда шагомер в соответствии с третьим вариантом воплощения настоящего изобретения находится в закрытом состоянии.
На фиг.15A схематично показан вид в перспективе печатной платы после сборки, представляющий структуру модуля датчика шагомера на узле печатной платы в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.15B показан вид спереди печатной платы после сборки, описывающий структуру узла на печатной плате модуля датчика шагомера в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.15C показан вид сбоку печатной платы после сборки, описывающий структуру узла на печатной плате модуля датчика шагомера в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.16 показана блок-схема, представляющая функциональные блоки шагомера в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.17 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет на теле шагомер в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.18 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет на теле шагомер в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.19 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого выступает вперед, в большей степени, чем на фиг. 18, закрепляет на теле шагомер в соответствии с третьим вариантом воплощения настоящего изобретения.
На фиг.20 схематично показан вид сбоку состояния, когда шагомер в соответствии с четвертым вариантом воплощения настоящего изобретения находится в закрытом состоянии.
На фиг.21A схематично показан вид в перспективе печатной платы после сборки, представляющий структуру узла для печатной платы модуля датчика шагомера в соответствии с четвертым вариантом воплощения настоящего изобретения.
На фиг.21B показан вид спереди печатной платы после сборки, представляющий структуру сборки на печатной плате модуля датчика шагомера в соответствии с четвертым вариантом воплощения настоящего изобретения.
На фиг.21C показан вид сбоку печатной платы после сборки, представляющий структуру узла печатной платы модуля датчика шагомера в соответствии с четвертым вариантом воплощения настоящего изобретения.
На фиг.22 показан вид, схематично представляющий состояния наклона модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет на теле шагомер в соответствии с четвертым вариантом воплощения настоящего изобретения.
На фиг.23 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет на теле шагомер в соответствии с четвертым вариантом воплощения настоящего изобретения.
Описание обозначений ссылочных позиций
100A-100D шагомер
110 кожух корпуса
111 поверхность дисплея
113 часть установки стержня
114 часть замка
116 модуль дисплея
117 модуль операций
120 кожух крышки
121 поверхность крышки
122 поверхность крепления
123 часть установки стержня
124 часть приема
125 часть установки стержня
130 деталь зажима
131 часть установки стержня
132 пружина
140 печатная плата
141 установочная поверхность
142 отверстие для винта
150 модуль датчика
150A первый модуль датчика
150B второй модуль датчика
151, 151a, 151b элемент в форме пластины
152, 152a, 152b фиксированная часть
153, 153a, 153b балочная часть
154, 154a, 154b, 155, 155a, 155b часть груза
156, 156a, 156b пьезоэлектрический элемент
160, 166 модуль усилителя
161, 167 модуль фильтра
162 ЦПУ
162a схема расчета
163 модуль памяти
164 батарея
165 схема постоянного напряжения
200 пользователь
201 нижняя часть живота
Подробное описание изобретения
Варианты воплощения настоящего изобретения будут подробно описаны со ссылкой на чертежи. В описанных ниже вариантах воплощения будет приведено описание, представляющее портативный шагомер, предназначенный для закрепления его на поясе пользователя в качестве детектора движения тела. Первый - третий варианты воплощения, описанные ниже, представляют собой варианты воплощения, основанные на первом аспекте настоящего изобретения, и четвертый вариант воплощения, описанный ниже, представляет собой вариант воплощения, основанный на втором аспекте настоящего изобретения.
Первый вариант воплощения
На фиг.1 и фиг.2 показаны виды, представляющие внешний вид структуры шагомера в соответствии с первым вариантом воплощения настоящего изобретения, где на фиг.1 схематично представлен вид в перспективе, когда шагомер находится в открытом состоянии, и на фиг.2 показан вид сбоку, когда шагомер находится в открытом состоянии. На фиг.3 показан вид, представляющий внутреннюю структуру шагомера в соответствии с настоящим вариантом воплощения, и схематично показан вид сбоку шагомера, когда он находится в закрытом состоянии. Вначале будут описаны внешний вид и внутренняя структура шагомера в соответствии с настоящим вариантом воплощения со ссылкой на эти чертежи.
Как показано на фиг.1 и фиг.2, шагомер 100A в соответствии с настоящим вариантом воплощения включает в себя компактный корпус устройства, который можно носить с собой, при этом корпус устройства разделен на кожух 110 корпуса, кожух 120 крышки и деталь 130 зажима.
Кожух 110 корпуса включает в себя поверхность 111 дисплея, выполненную с модулем 116 дисплея для отображения различной информации, такой как подсчитанное количество шагов, затраченное количество калорий, и модуль 117 операций, предназначенный для приема операций, вводимых пользователем. Корпус 120 крышки включает в себя поверхность 121 крышки, которая в закрытом состоянии закрывает поверхность 111 дисплея описанного выше кожуха 110 корпуса.
Часть 113 установки стержня расположена на нижнем конце кожуха 110 корпуса, и часть 123 установки стержня расположена на нижнем конце кожуха 120 крышки. Линейно продолжающийся стержень вставляют в части 113 и 123 установки стержня таким образом, что часть кожуха 110 корпуса и кожух 120 крышки соединяются с возможностью поворота в направлении стрелки А, показанной на фиг.2.
Часть 114 замка расположена на верхнем конце кожуха 110 корпуса, и часть 124 приема предназначена для приема части 114 замка, расположена на верхнем конце кожуха 120 крышки. Поверхность 111 дисплея кожуха 110 корпуса закрыта поверхностью 121 крышки кожуха 120 крышки, когда часть 114 замка принимает и зацепляется с нею в части 124 приема. Поэтому закрытое состояние поддерживается благодаря соединению части 114 замка с частью 124 приема, когда не требуется проверять модуль 116 дисплея или работать с модулем 117 операций.
Основная поверхность на стороне, противоположной поверхности 121 крышки кожуха 120 крышки, становится поверхностью 122 крепления при креплении корпуса устройства на теле. Деталь 130 зажима закреплена на поверхности 122 крепления. Часть 125 установки стержня расположена на поверхности 122 крепления кожуха 120 крышки, и часть 131 установки стержня расположена на поверхности детали 130 зажима, обращенной к кожуху 120 крышки. Линейно продолжающийся стержень пропущен через и расположен в частях 131 и 125 установки стержня таким образом, что деталь 130 зажима соединена с кожухом 120 крышки с возможностью поворота в направлении стрелки B, показанной на фиг.2. Пружина 132 закреплена на стержне таким образом, что деталь 130 зажима постоянно подпружинена относительно кожуха 120 крышки под действием пружины 132. Поэтому шагомер 100A может быть закреплен на поясе с помощью детали 130 зажима.
Как показано на фиг.3, печатная плата 140, используемая в качестве подложки проводки, расположена и закреплена внутри кожуха 110 корпуса шагомера 100A. Печатная плата 140 неподвижно закреплена на корпусе устройства, и модуль 150 датчика прикреплен к установочной поверхности 141, которая представляет собой одну основную поверхность печатной платы 140. Модуль 150 датчика соответствует первому модулю детектирования движения тела в соответствии с первым аспектом настоящего изобретения. Установочная поверхность 141 печатной платы 140 расположена с наклоном под заданным углом наклона относительно поверхности 122 крепления корпуса устройства. В представленном шагомере 100A показан случай, в котором модуль 150 датчика закреплен на основной поверхности печатной платы 140 на стороне, которая не обращена к поверхности 122 крепления корпуса устройства, но может быть закреплен на основной поверхности печатной платы 140 на стороне, которая обращена к поверхности 122 крепления корпуса устройства.
На фиг.4 показан вид, представляющий конструкцию узла печатной платы модуля датчика шагомера в соответствии с настоящим вариантом воплощения. На фиг.4A схематично показан вид в перспективе печатной платы после сборки, и на фиг.4B и на фиг.4C показан вид спереди и вид сбоку соответственно печатной платы после сборки. Конструкция узла модуля датчика шагомера в соответствии с настоящим вариантом воплощения будет описана со ссылкой на эти чертежи.
Как показано на фиг.4A-4C, печатная плата 140 изготовлена из элемента в форме пластины, который в виде в плане имеет, по существу, прямоугольную форму, при этом прокладка цепей выполнена на его основной поверхности. Различные детали, составляющие цепи, установлены на установочной поверхности 141 печатной платы 140 и на основной поверхности на стороне, противоположной установочной поверхности 141, в соответствии с необходимостью, таким образом, что конфигурируются различные функциональные блоки, которые будут описаны ниже. Отверстие 142 для винта сформировано в заданном положении на печатной плате 140, и печатная плата 140 неподвижно закреплена на кожухе 110 корпуса путем установки винта через отверстие 142 для винта и крепления винта на кожухе 110 корпуса.
Модуль 150 датчика закреплен в заданном положении установочной поверхности 141 печатной платы 140. Модуль 150 датчика включает в себя элемент 151 в форме пластины, имеющий консольную структуру, и пьезоэлектрический элемент 156 закреплен на элементе 151 в форме пластины.
Элемент 151 в форме пластины имеет внешнюю форму, представляющую, по существу, L-образную форму в виде в плане, где фиксированная часть 152 или один его конец неподвижно закреплен на печатной плате 140 и другой конец расположен параллельно вдоль установочной поверхности 141 печатной платы 140, не будучи закрепленным на печатной плате 140. Участок элемента 151 в форме пластины, продолжающийся параллельно установочной поверхности 141 печатной платы 140, образует балочную часть 153, которая упруго деформируется при движении тела. Основная поверхность балочной части 153 расположена так, что она перпендикулярно пересекает установочную поверхность 141 печатной платы 140. Поэтому основная поверхность балочной части 153 расположена с наклоном под заданным углом наклона относительно поверхности 122 крепления корпуса устройства (см. фиг.3).
Части 154 и 155 груза, сформированные путем изгиба элемента 151 в форме пластины, сформированы на дистальном оконечном участке балочной части 153. Части 154 и 155 груза представляют собой места, предусмотренные для усиления деформации балочной части 153 в связи с движением тела. Элемент 151 в форме пластины просто требуется выполнить как элемент, обладающий упругостью в такой степени, чтобы балочная часть 153 соответствующим образом изгибалась при движении тела, и при этом может использоваться металлическая пластина и т.д., сформированная путем штамповки.
Пьезоэлектрический элемент 156 имеет форму пластины, по существу, прямоугольную в виде в плане и надежно закреплен на основной поверхности балочной части 153 элемента 151 в форме пластины. Керамический элемент и т.д. в форме пластины используется в качестве пьезоэлектрического элемента 156. В представленном модуле 150 датчика пьезоэлектрический элемент 156 надежно закреплен на стороне нижней поверхности балочной части 153, но может быть надежно закреплен на стороне верхней поверхности.
Печатная плата 140, на которой закреплен модуль 150 датчика, расположена и закреплена внутри кожуха 110 корпуса. Поэтому, когда пользователь закрепляет кожух 110 корпуса на теле, изгиб в направлении стрелки C1 по фиг.4B и фиг.4C образуется в балочной части 153 элемента 151 в форме пластины при движении тела. При изгибе балочной части 153 в пьезоэлектрическом элементе 156 возникает деформация, и электрический сигнал, соответствующий такой деформации, выводится из пьезоэлектрического элемента 156. Выходной электрический сигнал выводят в различные цепи, которые будут описаны ниже и которые используются для подсчета количества шагов.
Ось детектирования, вдоль которой может быть получена максимальная чувствительность, присутствует в модуле 150 датчика. Направление оси детектирования (направления оси детектирования) продолжается, совпадая с нормальным направлением основной поверхности балочной части 153 элемента 151 в форме пластины, на котором закреплен пьезоэлектрический элемент 156 в описанной выше конфигурации (то есть, когда модуль 150 датчика выполнен в виде элемента 151 в форме пластины консольной структуры и пьезоэлектрического элемента 156, имеющего форму пластины, закрепленного на его основной поверхности). В модуле 150 датчика описанной выше конфигурации, если угол наклона от оси детектирования находится в пределах заданного диапазона углов, также можно детектировать движения тела в соответствующем направлении.
На фиг.5 показана блок-схема, представляющая функциональные блоки шагомера в соответствии с настоящим вариантом воплощения. Функциональные блоки шагомера в соответствии с настоящим вариантом воплощения будут описаны ниже со ссылкой на чертежи.
Как показано на фиг.5, шагомер 100A в соответствии с настоящим вариантом воплощения включает в себя модуль 160 усилителя, модуль 161 фильтра, ЦПУ (центральное процессорное устройство) 162, модуль 163 памяти, батарею 164 и схему 165 постоянного напряжения, в дополнение к модулю 116 дисплея, модулю 117 операций и модулю 150 датчика.
Модуль 160 усилителя включает в себя схему для усиления электрического сигнала, выводимого модулем 150 датчика. Модуль 161 фильтра включает в себя схему для удаления шумов, содержащихся в усиленном электрическом сигнале, поступающем с выхода модуля 160 усилителя. ЦПУ 162 включает в себя схему 162a расчета, предназначенную для подсчета количества шагов путем выполнения различных расчетов, используя электрический сигнал, поступающий с выхода модуля 161 фильтра. ЦПУ 162 выводит команду для отображения различной информации, такой как результат измерения, в модуль 116 дисплея, или выполняет команду, вводимую из модуля 117 операций.
Программа для выполнения различных процессов расчета сохранена в модуле 163 памяти. Батарея 164 представляет собой источник питания, предназначенный для подачи питания в ЦПУ 162. Схема 165 постоянного напряжения представляет собой схему стабилизации напряжения питания, подаваемого от батареи 164.
Как описано выше, направление изгиба балочной части 153 элемента 151 в форме пластины, которая составляет модуль 150 датчика, установлено не параллельно поверхности 122 крепления корпуса устройства в шагомере 100A в соответствии с настоящим вариантом воплощения. В соответствии с такой конфигурацией может предотвращаться снижение точности измерений из-за вариации в состоянии крепления, связанного с формой тела пользователя, и движение тела можно детектировать в большем количестве случаев. Этот механизм более подробно будет описан ниже.
На фиг.6 показан вид, представляющий состояние крепления, когда человек, нижняя часть живота которого не выступает наружу, закрепляет шагомер в соответствии с настоящим вариантом воплощения, и на фиг.7 показан вид, схематично представляющий состояние наклона модуля датчика в соответствующем случае. На фиг.8 показан вид, представляющий состояние крепления, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения, и на фиг.9 показан вид, схематично представляющий наклонное состояние модуля датчика в соответствующем случае.
Вначале со ссылкой на фиг.6 и фиг.7 будет описан в случай, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения. Шагомер 100A в соответствии с настоящим вариантом воплощения предназначен для крепления его корпуса устройства на верхнем краю одежды, такой как брюки и юбка, с использованием детали 130 зажима, или для крепления корпуса устройства на верхнем краю ремня, надетого на талию, где на фиг. 6 показан случай, когда корпус устройства закреплен на верхнем краю ремня, используя деталь 130 зажима. В этом случае корпус устройства шагомера 100A выполнен так, его направление вверх и вниз совпадают с, по существу, перпендикулярным направлением, поскольку нижняя часть живота 201 пользователя 200 не выступает наружу.
В упомянутом выше случае направление детектирования оси модуля 150 датчика расположено, как показано на фиг. 7. Таким образом, как показано на фиг. 7, поверхность 122 крепления корпуса устройства располагается параллельно перпендикулярной линии PL, и ось SA детектирования модуля 150 датчика, основная поверхность балочной части 153 которого расположена так, что она перпендикулярно пересекает установочную поверхность 141 печатной платы 140, расположенной с наклоном под заданным углом β наклона относительно поверхности 122 крепления, пересекает перпендикулярную линию PL под углом β наклона. Угол β наклона соответствует первому углу наклона в первом аспекте настоящего изобретения, описанном выше.
В шагомере 100A в соответствии с настоящим вариантом воплощения ось SA детектирования модуля 150 датчика расположена под наклоном таким образом, чтобы становиться ближе к поверхности 122 крепления в направлении верхней части корпуса устройства. Как показано на чертеже, угол β наклона находится в пределах диапазона детектирования угла α модуля 150 датчика, и, таким образом, перпендикулярное направление присутствует в диапазоне детектирования модуля 150 датчика даже, когда пользователь 200, нижняя часть живота 201 которого не выступает вперед, закрепляет шагомер 100A, как показано на фиг. 6. Поэтому движение тела пользователя 200 надежно детектируется модулем 150 датчика.
В случае, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения, будет описан со ссылкой на фиг. 8 и фиг. 9. Как показано на фиг. 8, когда человек, нижняя часть живота 201 которого выступает вперед, закрепляет шагомер 100A в соответствии с настоящим вариантом воплощения на верхнем краю ремня, надетого на талию, корпус устройства шагомера 100A располагается так, что его верхняя часть наклонена в направлении передней стороны пользователя 200, и нижняя часть наклонена в направлении нижней части стороны живота 201 пользователя 200. Таким образом, направления вверх и вниз корпуса устройства не совпадают с перпендикулярным направлением и находятся под большим наклоном.
В описанном выше случае направление оси детектирования модуля 150 датчика показано на фиг. 9. Таким образом, как показано на фиг. 9, поверхность 122 крепления корпуса устройства расположена с наклоном под заданным углом δ относительно перпендикулярной линии PL, и ось SA детектирования модуля 150 датчика, основная поверхность балочной части 153 которого расположена так, что она перпендикулярно пересекает установочную поверхность 141 печатной платы 140, распложенной с наклоном под заданным углом β наклона относительно поверхности 122 крепления, пересекает перпендикулярную линию PL под углом (β-δ).
Если заданный угол δ удовлетворяет условию (β-α)≤δ≤(β+α), перпендикулярное направление присутствует в диапазоне детектирования модуля 150 датчика. Таким образом, движение тела пользователя 200 можно надежно детектировать с помощью модуля 150 датчика, даже когда пользователь 200, нижняя часть живота 201 которого выступает вперед, закрепляет шагомер 100A, как показано на фиг. 8, благодаря соответствующей регулировке угла β наклона, сформированного поверхностью 122 крепления корпуса устройства и оси детектирования модуля 150 датчика. Поэтому движение тела можно детектировать в большем количестве случаев.
Как описано выше, снижение точности измерений из-за вариации состояния крепления, связанной с формой тела пользователя, можно предотвратить с помощью шагомера 100A в соответствии с настоящим вариантом воплощения, и движение тела можно детектировать в большем количестве случаев, включающих в себя, конечно, использование шагомера человеком, нижняя часть живота которого не выступает вперед, но также и использование шагомера человеком, нижняя часть живота которого выступает вперед.
Предположим, что используемый на практике датчик ускорения имеет угол детектирования α, равный 30° для модуля 150 датчика, при фактическом производстве шагомера 100A описанной выше конфигурации, при этом угол β наклона установочной поверхности 141 печатной платы 140 относительно поверхности 122 крепления корпуса устройства, в качестве примера, может составлять 20°. В такой конфигурации движение тела можно детектировать без каких-либо проблем, если угол δ находится в пределах диапазона от -10° до 50°, в закрепленном состоянии.
Второй вариант воплощения
На фиг.10 показан вид, представляющий внутреннюю структуру шагомера в соответствии со вторым вариантом воплощения настоящего изобретения, и схематично представлен вид, когда шагомер находится в закрытом состоянии. На фиг.11 показан вид, представляющий структуру узла печатной платы модуля датчика шагомера в соответствии с настоящим вариантом воплощения. На фиг.11A схематично показан вид в перспективе печатной платы после сборки, и на фиг.11B и фиг.11C показан вид спереди и вид сбоку соответственно печатной платы после сборки. На чертежах одинаковыми номерами ссылочных позиций обозначены те же участки, что и у шагомера 100A, в соответствии с первым вариантом воплощения, и их описание здесь не будет повторяться.
В шагомере 100B в соответствии с настоящим вариантом воплощения корпус устройства разделен на кожух 110 корпуса, кожух 120 крышки и деталь 130 зажима, и печатная плата 140, используемая как подложка проводки, расположена и закреплена внутри кожуха 110 корпуса, как показано на фиг.10, аналогично шагомеру 100A в соответствии с первым вариантом воплощения, описанным выше. Печатная плата 140 неподвижно закреплена на кожухе тела, и модуль 150 датчика закреплен на установочной поверхности 141, которая представляет собой одну основную поверхность печатной платы 140. Модуль 150 датчика соответствует первому модулю детектирования движения тела в соответствии с первым аспектом настоящего изобретения. В шагомере 100B в соответствии с настоящим вариантом воплощения установочная поверхность 141 печатной платы 140 расположена параллельно поверхности 122 крепления корпуса устройства в отличие от шагомера 100A в соответствии с первым вариантом воплощения.
Как показано на фиг.11A-11C, печатная плата 140 изготовлена из элемента в форме пластины, имеющего, по существу, прямоугольную форму в виде в плане, и имеет структуру печатных проводников, сформированную на основной поверхности. Модуль 150 датчика включает в себя элемент 151 в форме пластины, имеющий консольную структуру, по существу, L-образной формы в виде в плане, и пьезоэлектрический элемент 156, имеющий форму пластины, по существу, прямоугольной формы в виде в плане, закрепленный на элементе 151 в форме пластины.
В шагомере 100B в соответствии с настоящим вариантом воплощения основная поверхность балочной части 153 элемента 151 в форме пластины расположена так, что она пересекает установочную поверхность 141 печатной платы 140 под заданным углом наклона, не будучи расположена ортогонально, в отличие от шагомера 100A в соответствии с первым вариантом воплощения. Поэтому основная поверхность балочной части 153 расположена с наклоном под заданным углом наклона относительно поверхности 122 крепления корпуса устройства (см. фиг.10).
Когда пользователь закрепляет кожух 110 корпуса на теле, изгиб в направлении стрелки C2 по фиг.11B и фиг.11C образуется в балочной части 153 элемента 151 в форме пластины при движении тела. Деформация возникает в пьезоэлектрическом элементе 156 при изгибе балочной части 153, и электрический сигнал, соответствующий такой деформации, выводится из пьезоэлектрического элемента 156.
В шагомере 100B в соответствии с настоящим вариантом воплощения часть 155 груза, расположенная стоящей от конца на стороне печатной платы 140 балочной части 153, выполнена так, чтобы становиться дальше от печатной платы 140 от основания в направлении дистального конца. Часть 154 груза, расположенная стоящей от конца на противоположной стороне стороны печатной платы 140 балочной части 153, которая формирует пару с частью 155 груза, выполнена так, чтобы становиться ближе к печатной плате 140 от основания в направлении дистального конца. В соответствии с такой конфигурацией часть 155 груза не будет входить в контакт с печатной платой 140, даже если изгиб формируется в балочной части 153, и, таким образом, движение тела может быть точно детектировано, и шагомер 100B может быть выполнен миниатюрным (более тонким).
Как описано выше, направление изгиба балочной части 153 элемента 151 в форме пластины, которая образует модуль 150 датчика, установлено не параллельно относительно поверхности 122 крепления корпуса устройства шагомера 100B в соответствии с настоящим вариантом воплощения. В соответствии с такой конфигурацией снижение точности измерения из-за вариации состояния крепления, связанной с формой тела пользователя, может предотвращаться, и движение тела может детектироваться в большем количестве случаев. Механизм его будет подробно описан ниже.
На фиг.12 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения. На фиг. 13 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения.
Состояние крепления, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер 100B в соответствии с настоящим вариантом воплощения, будет таким же, как и на фиг.6 в первом варианте воплощения, и направление оси детектирования модуля 150 датчика располагается в соответствующем случае, как показано на фиг.12. Таким образом, как показано на фиг.12, поверхность 122 крепления корпуса устройства располагается параллельно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также располагается параллельно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153 располагается с наклоном под заданным углом β наклона относительно установочной поверхности 141 печатной платы 140, ось SA детектирования модуля 150 датчика пересекает перпендикулярную линию PL под углом β наклона. Угол β наклона соответствует первому углу наклона в первом аспекте настоящего изобретения, описанном выше.
В шагомере 100B в соответствии с настоящим вариантом воплощения ось SA детектирования модуля 150 датчика расположена под наклоном так, чтобы становиться ближе к поверхности 122 крепления в направлении верхней части корпуса устройства, как показано на фиг.12, и угол β наклона находится в пределах диапазона угла α детектирования модуля 150 датчика, и, таким образом, перпендикулярное направление присутствует в диапазоне детектирования модуля 150 датчика, даже когда пользователь, нижняя часть живота которого не выступает вперед, закрепляет шагомер 100B. Поэтому движение тела пользователя надежно детектируется модулем 150 датчика.
Состояние крепления, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер 100B в соответствии с настоящим вариантом воплощения, будет таким же, как показано на фиг. 8 в первом варианте воплощения, и направление оси детектирования модуля 150 датчика располагается в соответствующем случае, как показано на фиг.13. Таким образом, со ссылкой на фиг.13, поверхность 122 крепления корпуса устройства располагается под наклоном с заданным углом δ относительно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также располагается с наклоном под заданным углом δ относительно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153 расположена с наклоном под заданным углом β наклона относительно установочной поверхности 141 печатной платы 140, ось SA детектирования модуля 150 датчика пересекает перпендикулярную линию PL под углом (β-δ).
Если заданный угол δ удовлетворяет условию (β-α)≤δ≤(β+α), в пределах диапазона детектирования модуля 150 датчика присутствует перпендикулярное направление. Поэтому движение тела пользователя может надежно детектироваться модулем 150 датчика, даже когда пользователь, нижняя часть живота которого выступает вперед, закрепляет шагомер 100B. Таким образом, движение тела может детектироваться в большем количестве случаев путем соответствующей регулировки угла β наклона, сформированного поверхностью 122 крепления корпуса устройства и осью детектирования модуля 150 датчика.
Как описано выше, снижение точности измерения из-за вариации состояния крепления, связанного с формой тела пользователя, можно предотвратить с помощью шагомера 100B в соответствии с настоящим вариантом воплощения, и движение тела можно детектировать в большем количестве случаев, включая, конечно, использование его человеком, нижняя часть живота которого не выступает вперед, но также и использование человеком, нижняя часть живота которого выступает вперед.
Предположим, что на практике используется датчик ускорения с углом α детектирования модуля 150 датчика, равным 30°, при фактическом производстве шагомера 100B описанной выше конфигурации, при этом угол β наклона оси SA детектирования модуля 150 датчика относительно поверхности 122 крепления корпуса устройства может составить, например, 20°. Здесь расстояние между балочной частью 153 и печатной платой 140 больше чем или равно 0,8 мм и, предпочтительно, составляет приблизительно 1,0 мм. В такой конфигурации движение тела можно детектировать без проблем, если угол δ находится в пределах диапазона от -10 до 50° в прикрепленном состоянии.
На фиг.14 показан вид, представляющий внутреннюю структуру шагомера в соответствии с третьим вариантом воплощения, и представляет собой схематичное изображение в виде сбоку, когда шагомер находится в закрытом состоянии. На фиг.15 показан вид, представляющий структуру узла печатной платы модуля датчика шагомера в соответствии с настоящим вариантом воплощения. На фиг.15A схематично показан вид в перспективе печатной платы после сборки, и на фиг.15B и фиг.15C показаны вид спереди и вид сбоку соответственно печатной платы после сборки. На чертеже одинаковые части с шагомером 100B в соответствии со вторым вариантом воплощения обозначены теми же номерами ссылочных позиций, и их описание здесь не повторяется.
В шагомере 100C в соответствии с настоящим вариантом воплощения корпус устройства разделен на кожух 110 корпуса, кожух 120 крышки и деталь 130 зажима, и печатная плата 140, используемая в качестве подложки проводки, расположена и закреплена внутри кожуха 110 корпуса, как показано на фиг. 14, аналогично шагомеру 100B в соответствии со вторым вариантом воплощения, описанным выше. Печатная плата 140 неподвижно закреплена на кожухе тела, и два модуля датчика - первый модуль 150A датчика и второй модуль 150B датчика закреплены на установочной поверхности 141, которая представляет собой одну основную поверхность печатной платы 140. Первый модуль 150A датчика и второй модуль 150B датчика соответственно соответствуют первому модулю детектирования движения тела и второму модулю детектирования движения тела в соответствии с первым аспектом настоящего изобретения. В шагомере 100C в соответствии с настоящим вариантом воплощения установочная поверхность 141 печатной платы 140 расположена параллельно поверхности 122 крепления корпуса устройства аналогично шагомеру 100B в соответствии со вторым вариантом воплощения.
Как показано на фиг.15A-15C, печатная плата 140 изготовлена из элемента в форме пластины, который имеет, по существу, прямоугольную форму в виде в плане и имеет структуру печатных проводников, сформированную на основной поверхности. Первый модуль 150A датчика и второй модуль 150B датчика соответственно включают в себя элемент 151a и 151b в форме пластины, имеющей консольную структуру, по существу L-образной формы в виде в плане, и пьезоэлектрические элементы 156a и 156b, имеющие форму пластины, по существу прямоугольной формы в виде в плане, закреплены на элементах 151a и 151b в форме пластины.
В шагомере 100C в соответствии с настоящим вариантом воплощения основная поверхность балочной части 153a элемента 151a в форме пластины первого модуля 150A датчика расположена так, что она пересекает установочную поверхность 141 печатной платы 140 под заданным первым углом наклона, не будучи расположенной ортогонально. Кроме того, основная поверхность балочной части 153b элемента 151b в форме пластины второго модуля 150B датчика расположена так, что она пересекает установочную поверхность 141 печатной платы 140 под заданным вторым углом наклона, который больше, чем первый угол наклона модуля 150A первого датчика, не будучи ортогональной. Поэтому основные поверхности балочных частей 153a и 153b соответствующих модулей 150A и 150B датчиков расположены с наклоном под заданным первым углом наклона и вторым углом наклона относительно поверхности 122 крепления корпуса устройства (см. фиг. 14).
Когда пользователь закрепляет кожух 110 корпуса на теле, изгиб в направлении стрелки C3 и C4, показанный на фиг.15B и фиг.15C, образуется в балочных частях 153a, 153b элементов 151a, 151b в форме пластины соответствующего первого модуля 150A датчика и второго модуля 150B датчика при движении тела. Деформация возникает в пьезоэлектрических элементах 156a, 156b при изгибе соответствующих балочных частей 153a, 153b, и электрический сигнал, соответствующий такой деформации, выводится из соответствующих пьезоэлектрических элементов 156a, 156b.
В шагомере 100C в соответствии с настоящим вариантом воплощения части 155a, 155b груза, расположенные стоящими от конца на стороне печатной платы 140 балочных частей 153a, 153b первого модуля 150A датчика и второго модуля 150B датчика соответственно, выполнены так, чтобы становиться дальше от печатной платы 140 от основания в направлении дистального конца. Части 154a, 154b груза расположены стоящими от конца на противоположной стороне стороны печатной платы 140 балочной части 153a, 153b, которая формирует пару, когда части 155a, 155b груза выполнены так, чтобы становиться ближе к печатной плате 140 от основания в направлении дистального конца. В соответствии с такой конфигурацией части 155a, 155b груза не будут входить в контакт с печатной платой 140, даже если изгиб происходит в балочных частях 153a, 153b, и, таким образом, движение тела можно точно детектировать, и шагомер 100C можно выполнить миниатюрным (сделать более тонким).
На фиг.16 показана блок-схема, представляющая функциональные блоки шагомера в соответствии с настоящим вариантом воплощения. Функциональные блоки шагомера в соответствии с настоящим вариантом воплощения будут описаны ниже со ссылкой на чертежи.
Как показано на фиг.16, шагомер 100C в соответствии с настоящим вариантом воплощения включает в себя два модуля 150A и 150B датчиков для модуля детектирования движения тела. В соответствии с этим, в шагомере 100C в соответствии с настоящим вариантом воплощения модули 160, 166 усилителя и фильтрующие модули 161, 167 расположены в соответствии с первым модулем 150A датчика и вторым модулем 150B датчика. ЦПУ 162 также имеет функцию, используемую в качестве модуля выбора в первом аспекте настоящего изобретения, для выбора, какой выходной сигнал следует выводить из модуля датчика, первого модуля 150A датчика или второго модуля 150B датчика, для выбора цели детектирования движения тела, и выполняет различные расчеты в схеме 162a расчетов, используя выбранный выходной сигнал, и подсчитывает количество шагов. В остальном конфигурация, помимо описанного выше, аналогична шагомеру 100A в соответствии с первым вариантом воплощения.
Как описано выше, направление изгиба балочных частей 153a, 153b элементов 151a, 151b в форме пластины, образующих первый модуль 150A датчика и второй модуль 150B датчика, расположено не параллельно относительно поверхности 122 крепления корпуса устройства в шагомере 100C в соответствии с настоящим вариантом воплощения. В соответствии с такой конфигурацией, снижение точности измерения из-за вариации состояния крепления, связанного с формой тела пользователя, можно предотвратить, и движение тела можно детектировать в большем количестве случаев. Такой механизм будет подробно описан ниже.
На фиг.17 показан вид, схематично представляющий наклонное положение модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения. На фиг.18 показан вид, схематично представляющий состояние наклона первого модуля датчика и второго модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер в соответствии с настоящим вариантом воплощения. На фиг.19 показан вид, схематично представляющий наклонное положение первого модуля датчика и второго модуля датчика, когда человек, нижняя часть живота которого выступает вперед, в большей степени, чем в случае, показанном на фиг.18, закрепляет шагомер в соответствии с настоящим вариантом воплощения.
Направление осей детектирования первого модуля 150A датчика и второго модуля 150B датчика, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер 100C в соответствии с настоящим вариантом воплощения, устанавливается, как показано на фиг.17. Таким образом, как показано на фиг.17, поверхность 122 крепления корпуса устройства располагается параллельно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также располагается параллельно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153a элемента 151a в форме пластины первого модуля 150A датчика располагается под наклоном с заданным первым углом β1 наклона относительно установочной поверхности 141 печатной платы 140, ось SA1 детектирования первого модуля 150A датчика пересекает перпендикулярную линию PL под углом β1 наклона. Первый угол β1 наклона соответствует первому углу наклона в первом аспекте настоящего изобретения, который был описан выше.
В шагомере 100C в соответствии с настоящим вариантом воплощения ось SA1 детектирования первого модуля 150A датчика расположена под наклоном так, чтобы становиться ближе к поверхности 122 крепления в направлении верхней части корпуса устройства, как показано на чертеже, и первый угол β1 наклона находится в пределах диапазона угла α1 детектирования первого модуля 150A датчика, и, таким образом, в диапазоне детектирования первого модуля 150A датчика существует перпендикулярное направление, даже когда пользователь, нижняя часть живота которого не выступает вперед, прикрепляет шагомер 100C. Поэтому движение тела пользователя надежно детектируется первым модулем 150A датчика.
Направление осей детектирования первого модуля 150A датчика и второго модуля 150B датчика расположено, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер 100C в соответствии с настоящим вариантом воплощения так, как показано на фиг.18. Таким образом, как показано на фиг.18, поверхность 122 крепления корпуса устройства располагается с наклоном под заданным углом δ1 относительно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенной параллельно поверхности 122 крепления, также располагается с наклоном под заданным углом δ1 относительно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153a элемента 151a в форме пластины первого модуля 150A датчика расположена с наклоном под заданным первым углом β1 наклона относительно установочной поверхности 141 печатной платы 140, ось SA1 детектирования первого модуля 150A датчика пересекает перпендикулярную линию PL под углом (β1-δ1).
Если заданный угол δ1 удовлетворяет условию (β1-α1)≤δ1≤(β1+α1), в пределах диапазона детектирования первого модуля 150A датчика существует перпендикулярное направление. Поэтому движение тела пользователя можно надежно детектировать с помощью первого модуля 150A датчика, даже когда пользователь, нижняя часть живота которого выступает вперед, закрепляет шагомер 100C. Таким образом, движение тела можно детектировать в большом количестве случаев путем соответствующей регулировки первого угла β1 наклона, сформированного поверхностью 122 крепления корпуса устройства и осью SA1 детектирования первого модуля 150A датчика.
Направление соответствующей оси детектирования первого модуля 150A датчика и модуля 150B датчика, когда человек, нижняя часть живота которого выступает вперед в большей степени, чем в упомянутом выше случае, прикрепляет шагомер 100C в соответствии с настоящим вариантом воплощения, показано на фиг.19. Таким образом, как показано на фиг.19, поверхность 122 крепления корпуса устройства расположена с наклоном под заданным углом δ2(>δ1) относительно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также расположена с наклоном под заданным углом δ2 относительно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153b элемента 151b в форме пластины второго модуля 150B датчика расположена с наклоном под заданным вторым углом β2 наклона относительно установочной поверхности 141 печатной платы 140, ось SA2 детектирования второго модуля 150B датчика пересекает перпендикулярную линию PL под углом (β2-δ2). Второй угол β2 наклона соответствует второму углу наклона в первом аспекте настоящего изобретения.
Если заданный угол δ2 удовлетворяет условию (β2-α2)≤δ2≤(β2+α2), в пределах диапазона детектирования второго модуля 150B датчика существует перпендикулярное направление. Поэтому движение тела пользователя 200 может быть надежно детектировано вторым модулем 150B датчика, даже когда пользователь 200, нижняя часть живота 201 которого в большей степени выступает вперед, закрепляет шагомер 100C. Таким образом, движение тела может быть детектировано в большем количестве случаев путем соответствующей регулировки второго угла β2 наклона, сформированного поверхностью 122 крепления корпуса устройства и оси SA2 детектирования второго модуля 150B датчика.
Как описано выше, снижение точности измерения в результате вариации состояния крепления, в соответствии с формой тела пользователя, может быть дополнительно предотвращено с помощью шагомера 100C в соответствии с настоящим вариантом воплощения по сравнению с шагомерами 100A и 100B в соответствии с первым и вторым вариантами воплощения, в которых предусмотрен один модуль датчика, и движение тела может быть детектировано в большем количестве случаев, включающих в себя, конечно, использование человеком, нижняя часть живота которого не выступает вперед, но также и использование человеком, нижняя часть живота которого выступает наружу.
Диапазон детектирования первого модуля 150A датчика и диапазон детектирования второго модуля 150B датчика сформированы так, что они частично перекрываются, обеспечивая неразрывность диапазона детектирования шагомера 100C в соответствии с настоящим вариантом воплощения. Поэтому, когда наклон относительно перпендикулярной линии корпуса устройства находится в заданном диапазоне углов, движение тела детектируется как первым модулем 150A датчика, так и вторым модулем 150B датчика. Однако в шагомере 100C в соответствии с настоящим вариантом воплощения ЦПУ 162 выполняет функцию модуля выбора для альтернативного выбора сигнала, и, таким образом, предотвращается избыточный подсчет количества шагов.
Если предположить использование на практике датчика ускорения с углом α детектирования равным 30° модулей 150A и 150B датчиков при фактическом производстве шагомера 100C в соответствии с описанной выше конфигурацией, в качестве примера, угол β1 наклона оси SA1 детектирования первого модуля 150A датчика относительно поверхности 122 крепления корпуса устройства может составлять 20°, и угол β2 наклона оси SA2 детектирования второго модуля 150B датчика относительно поверхности 122 крепления корпуса устройства может составлять 70°. Здесь расстояние между балочными частями 153a, 153b и печатной платой 140 больше или равно 0,8 мм и, предпочтительно, составляет приблизительно 1,0 мм. В такой конфигурации движение тела может быть детектировано без проблем, если угол δ находится в пределах диапазона от -10° до 100° в закрепленном состоянии.
Четвертый вариант воплощения
На фиг.20 показан вид, представляющий внутреннюю структуру шагомера в соответствии с четвертым вариантом воплощения, и его схематичный вид сбоку, когда шагомер находится в закрытом состоянии. На фиг.21 показан вид, представляющий структуру после сборки на печатной плате модуля датчика шагомера в соответствии с настоящим вариантом воплощения. На фиг.21A схематично показан вид в перспективе печатной платы после сборки, и на фиг.21B и фиг.21C показан вид спереди и вид сбоку соответственно печатной платы после сборки. На чертежах теми же номерами ссылочных позиций обозначены те же участки, что и у шагомера 100C, в соответствии с третьим вариантом воплощения, и их описание здесь не повторяется.
В шагомере 100D в соответствии с настоящим вариантом воплощения корпус устройства разделен на кожух 110 корпуса, кожух 120 крышки и деталь 130 зажима, и печатная плата 140, используемая в качестве подложки проводки, установлена и закреплена внутри кожуха 110 корпуса, как показано на фиг.20, аналогично шагомеру 100C в соответствии с третьим вариантом воплощения, описанным выше. Печатная плата 140 неподвижно закреплена на корпусе устройства, и два модуля датчика - первый модуль 150A датчика и второй модуль 150B датчика закреплены на установочной поверхности 141, которая представляет собой одну основную поверхность печатной платы 140. Первый модуль 150A датчика и второй модуль 150B датчика соответственно соответствуют первому модулю детектирования движения тела и второму модулю детектирования движения тела в соответствии со вторым аспектом настоящего изобретения. В шагомере 100D в соответствии с настоящим вариантом воплощения установочная поверхность 141 печатной платы 140 расположена параллельно поверхности 122 крепления корпуса устройства, аналогично шагомеру 100C в соответствии с третьим вариантом воплощения.
Как показано на фиг.21A-21C, печатная плата 140 изготовлена из элемента в форме пластины, имеющего, по существу, прямоугольную форму в виде в плане, и имеет структуру печатных цепей, сформированную на основной поверхности. Первый модуль 150A датчика и второй модуль 150B датчика соответственно включает в себя элемент 151a, 151b в форме пластины, имеющий консольную структуру, по существу, L-образной формы в виде в плане, и пьезоэлектрические элементы 156a, 156b, имеющие форму пластины, по существу, прямоугольной формы в виде в плане, закрепленные на элементах 151a, 151b в форме пластины.
В шагомере 100D в соответствии с настоящим вариантом воплощения основная поверхность балочной части 153a элемента 151a в форме пластины первого модуля 150A датчика расположена таким образом, чтобы она была ортогональна установочной поверхности 141 печатной платы 140. Кроме того, основная поверхность балочной части 153b элемента 151b в форме пластины второго модуля 150B датчика расположена так, что она пересекает установочную поверхность 141 печатной платы 140 под заданным углом наклона, не будучи при этом ортогональной. Поэтому основная поверхность балочной части 153a модуля 150A датчика расположена ортогонально поверхности 122 крепления корпуса устройства, и основная поверхность балочной части 153b модуля 150B датчика расположена под наклоном с заданным углом наклона относительно поверхности 122 крепления корпуса устройства (см. фиг.20).
Когда пользователь закрепляет кожух 110 корпуса на своем теле, изгиб в направлении стрелки C5 и C6 по фиг. 21B и фиг. 21C формируется в балочных частях 153a, 153b элементов 151a, 151b в форме пластины соответствующего первого модуля 150A датчика и второго модуля 150B датчика при движении тела. При этом в пьезоэлектрических элементах 156a, 156b возникает деформация при изгибе соответствующих балочных частей 153a, 153b, и электрический сигнал, соответствующий деформации, выводится из соответствующих пьезоэлектрических элементов 156a, 156b.
В шагомере 100D в соответствии с настоящим вариантом воплощения часть 155b груза, расположенная стоящей от конца на стороне печатной платы 140 балочной части 153b второго модуля 150B датчика, выполнена так, чтобы становиться дальше от печатной платы 140 от основания в направлении дистального конца. Часть 154b груза, расположенная стоящей от конца на противоположной стороне стороны печатной платы 140 балочной части 153b, которая формирует пару с частью 155b груза, выполнена так, чтобы становиться ближе к печатной плате 140 от основания в направлении дистального конца. В соответствии с такой конфигурацией часть 155b груза не будет входить в контакт с печатной платой 140, даже если изгиб формируется в балочной части 153, и таким образом обеспечиваются возможность точного детектирования движения тела и получение миниатюрного (более тонкого) шагомера 100D.
Как описано выше, направление изгиба балочной части 153a элемента 151a в форме пластины, который образует первый модуль 150A датчика, установлено параллельно поверхности 122 крепления корпуса устройства, и направление изгиба балочной части 153b элемента 151b в форме пластины, которое образует второй модуль 150B датчика, установлено не параллельно относительно поверхности 122 крепления корпуса устройства в шагомере 100D настоящего варианта воплощения. В соответствии с такой конфигурацией можно исключить снижение точности измерения из-за вариации состояния крепления, в связи с формой тела пользователя, и движения тела можно детектировать в большем количестве случаев. Такой механизм будет подробно описан ниже.
На фиг.22 показан вид, схематично представляющий состояние наклона модуля датчика, когда человек, нижняя часть живота которого не выступает вперед, прикрепляет на свое тело шагомер в соответствии с настоящим вариантом воплощения. На фиг.23 показан вид, схематично представляющий состояние наклона первого модуля датчика и второго модуля датчика, когда человек, нижняя часть живота которого выступает вперед, закрепляет на себе шагомер в соответствии с настоящим вариантом воплощения.
Направление осей детектирования первого модуля 150A датчика и второго модуля 150B датчика установлено, когда человек, нижняя часть живота которого не выступает вперед, закрепляет шагомер 100D в соответствии с настоящим вариантом воплощения таким образом, как показано на фиг.22. Таким образом, как показано на фиг.22, поверхность 122 крепления корпуса устройства располагается параллельно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также располагается параллельно перпендикулярной линии PL. В этом состоянии ось SA1 детектирования первого модуля 150A датчика ортогональна перпендикулярной линии PL, и таким образом обеспечивается возможность надежного детектирования движения тела в направлении оси детектирования, в котором может быть получена максимальная чувствительность первого модуля 150A датчика.
Направление осей детектирования первого модуля 150A датчика и второго модуля 150B датчика установлено, когда человек, нижняя часть живота которого выступает вперед, закрепляет шагомер 100D в соответствии с настоящим вариантом воплощения так, как показано на фиг.23. Таким образом, со ссылкой на фиг.23 поверхность 122 крепления корпуса устройства располагается с наклоном под заданным углом δ относительно перпендикулярной линии PL, и установочная поверхность 141 печатной платы 140, расположенная параллельно поверхности 122 крепления, также располагается под наклоном с заданным углом δ относительно перпендикулярной линии PL. Поскольку основная поверхность балочной части 153b элемента 151b в форме пластины второго модуля 150B датчика расположена с наклоном под заданным углом β наклона относительно установочной поверхности 141 печатной платы 140, ось SA2 детектирования второго модуля 150B датчика пересекает перпендикулярную линию PL под углом (β1-δ1). Угол β наклона соответствует углу наклона во втором аспекте настоящего изобретения.
Если заданный угол δ удовлетворяет условию (β-α2)≤δ≤(β+α2), в пределах диапазона детектирования второго модуля 150B датчика существует перпендикулярное направление. Поэтому движение тела пользователя может надежно детектироваться вторым модулем 150B датчика даже когда пользователь, нижняя часть живота которого выступает вперед, закрепляет шагомер 100D. Таким образом, движение тела может детектироваться в большем количестве случаев путем соответствующей регулировки угла β наклона, сформированного поверхностью 122 крепления корпуса устройства и осью SA2 детектирования второго модуля 150B датчика.
Как описано выше, снижение точности измерения из-за вариации состояния крепления, связанной с формой тела пользователя, может дополнительно предотвращаться с помощью шагомера 100D в соответствии с настоящим вариантом воплощения по сравнению с шагомерами 100A и 100B в соответствии с первым и вторым вариантами воплощения, в которых предусмотрен один модуль датчика, и движение тела может детектироваться в большем количестве случаев, включающих в себя, конечно, использование человеком, нижняя часть живота которого не выступает вперед, но также при использовании человеком, нижняя часть живота которого выступает вперед.
В шагомере 100D в соответствии с настоящим вариантом воплощения также диапазон детектирования первого модуля 150A датчика и диапазон детектирования второго модуля 150B датчика установлены так, что они частично перекрываются для обеспечения неразрывности диапазона детектирования аналогично шагомеру 100C в соответствии с третьим вариантом воплощения. Поэтому, когда наклон относительно перпендикулярной линии корпуса устройства находится в заданном диапазоне углов, движение тела детектируется как первым модулем 150A датчика, так и вторым модулем 150B датчика. В шагомере 100D в соответствии с настоящим вариантом воплощения, однако, ЦПУ 162 используется как модуль выбора для альтернативного выбора сигнала и таким образом предотвращается избыточный подсчет количества шагов аналогично шагомеру 100C в соответствии с третьим вариантом воплощения.
Если предположить использование на практике датчика ускорения, угол α детектирования которого составляет 30° для модулей 150A, 150B датчика при фактическом производстве шагомера 100D описанной выше конфигурации, угол β наклона оси SA2 детектирования второго модуля 150B датчика относительно поверхности 122 крепления корпуса устройства, в качестве примера, может составлять 55°. Здесь расстояние между балочными частями 153b и печатной платой 140 больше или равно 0,8 мм и предпочтительно составляет приблизительно 1,0 мм. В такой конфигурации движение тела можно без проблем детектировать, если угол δ находится в диапазоне от -30° до 85° в закрепленном состоянии.
Выше было приведено описание с первого по четвертый вариантов воплощения, иллюстрирующих случаи конфигурирования модуля датчика, используемого в качестве модуля детектирования движения тела с элементом в форме пластины, имеющим консольную структуру, и пьезоэлектрическим элементом, но оно не ограничивается такой конфигурацией. В качестве модуля детектирования движения тела может использоваться модуль датчика маятникового типа.
Каждый вариант воплощения, раскрытый здесь, является иллюстративным во всех аспектах и его не следует рассматривать как ограничение. Технический объем изобретения определен прилагаемой формулой изобретения и поэтому предполагается, что все изменения, которые попадают в объем охвата и ограничений формулы изобретения или эквивалентов такого объема охвата и ограничений, охвачены формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА, СПОСОБ ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА И ПРОГРАММА ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЙ ТЕЛА | 2007 |
|
RU2442534C2 |
| НАГРЕВАТЕЛЬНОЕ УСТРОЙСТВО | 2020 |
|
RU2776350C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ КОМПЕНСАЦИИ ДВИЖЕНИЯ В УЛЬТРАЗВУКОВОМ МОНИТОРИНГЕ ДЫХАНИЯ | 2019 |
|
RU2797191C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ СОЕДИНЕНИЯ | 2019 |
|
RU2768324C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710412C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710508C1 |



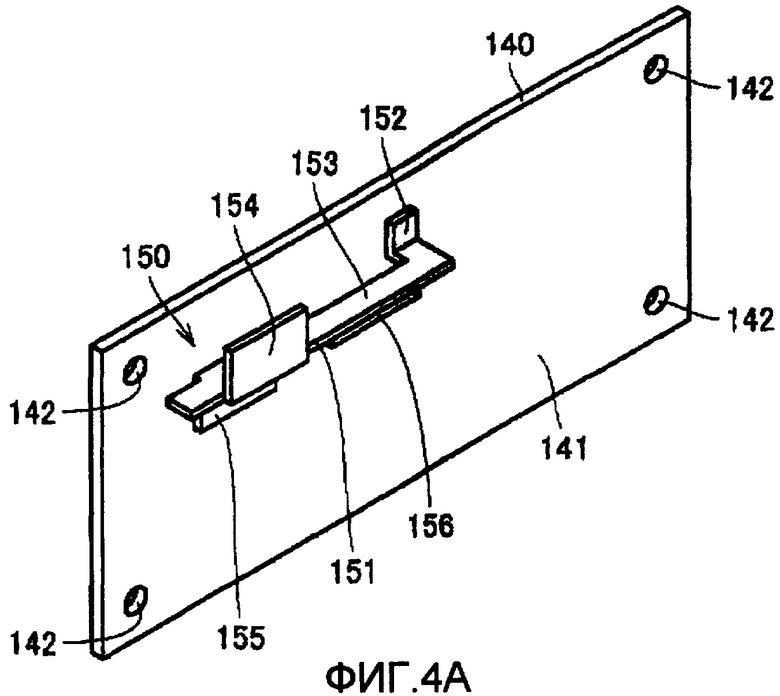

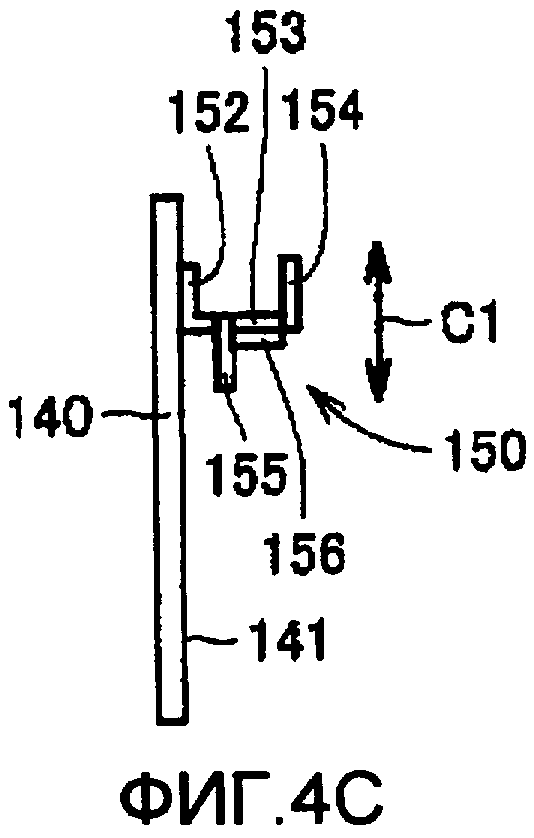
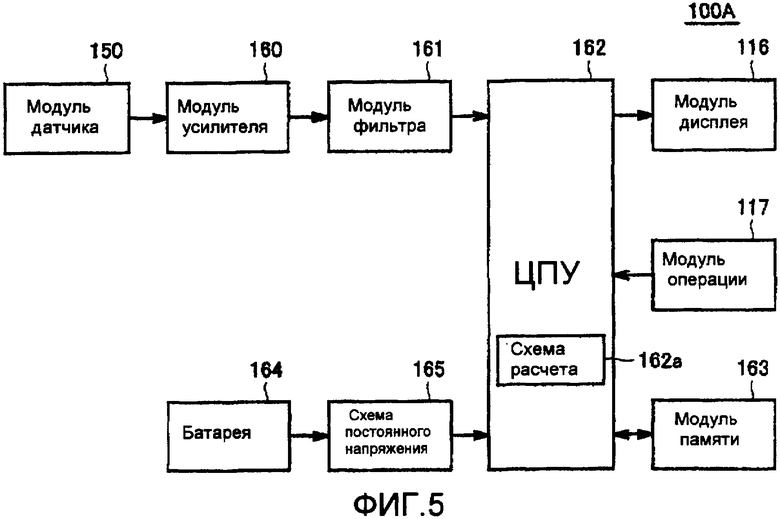


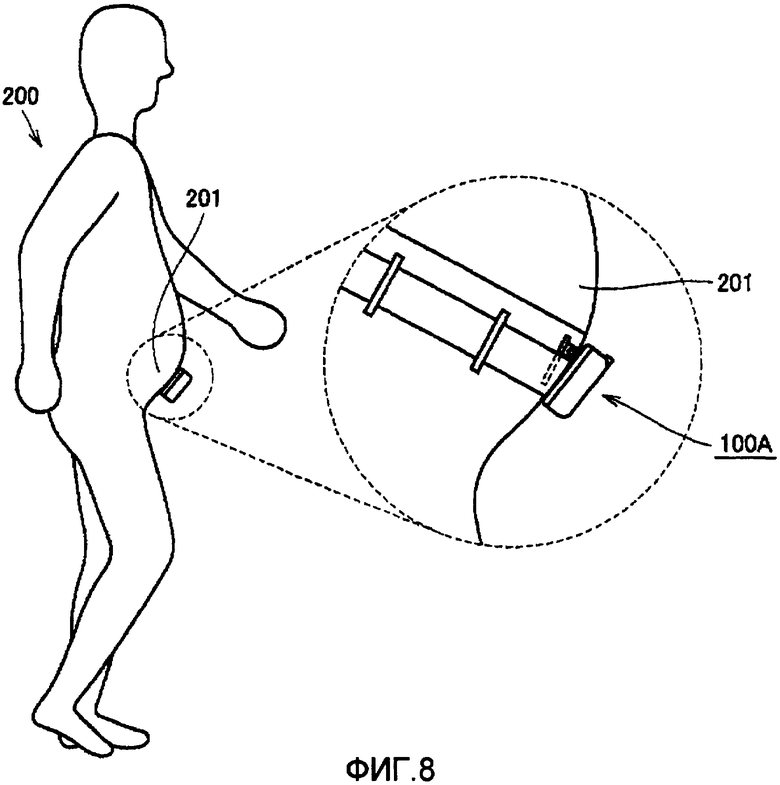
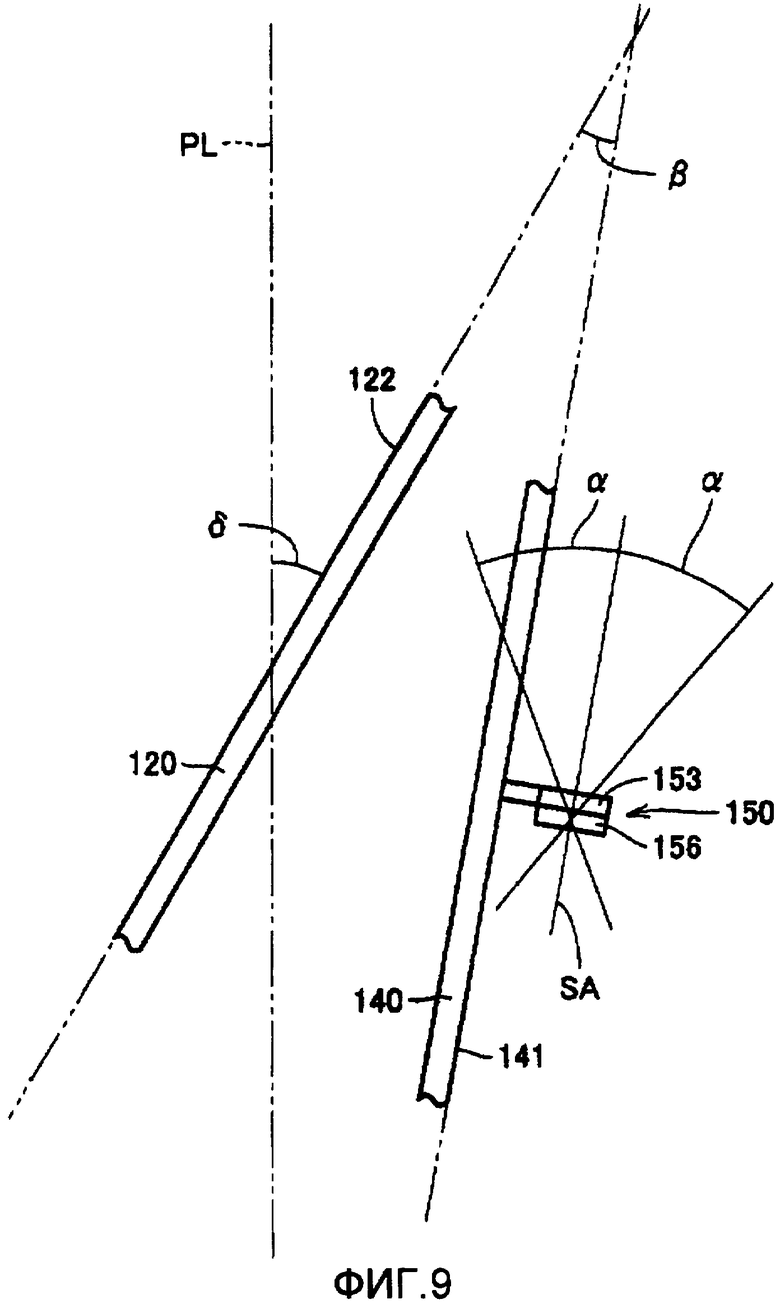
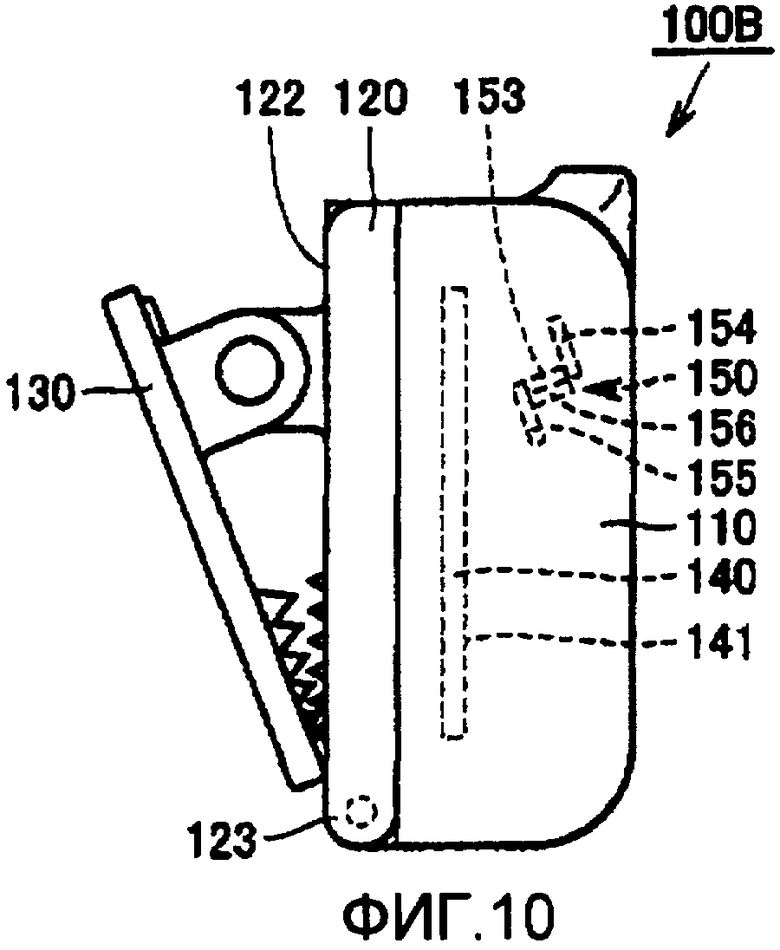
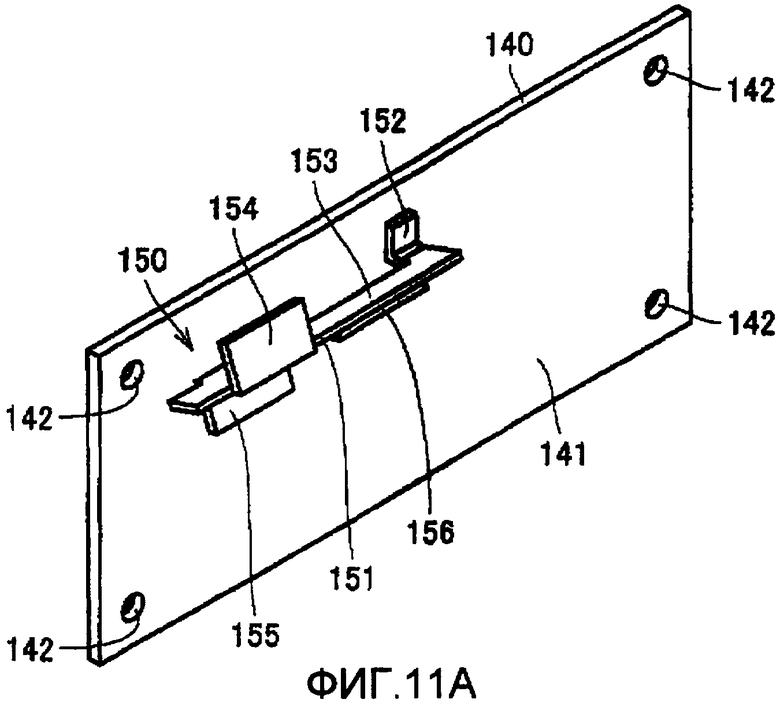
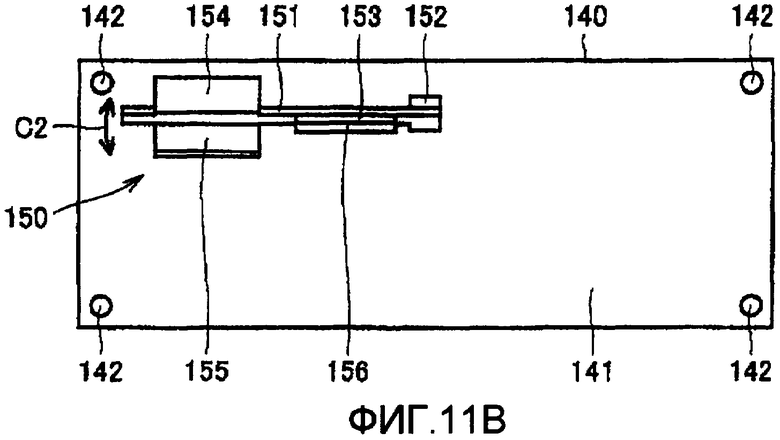

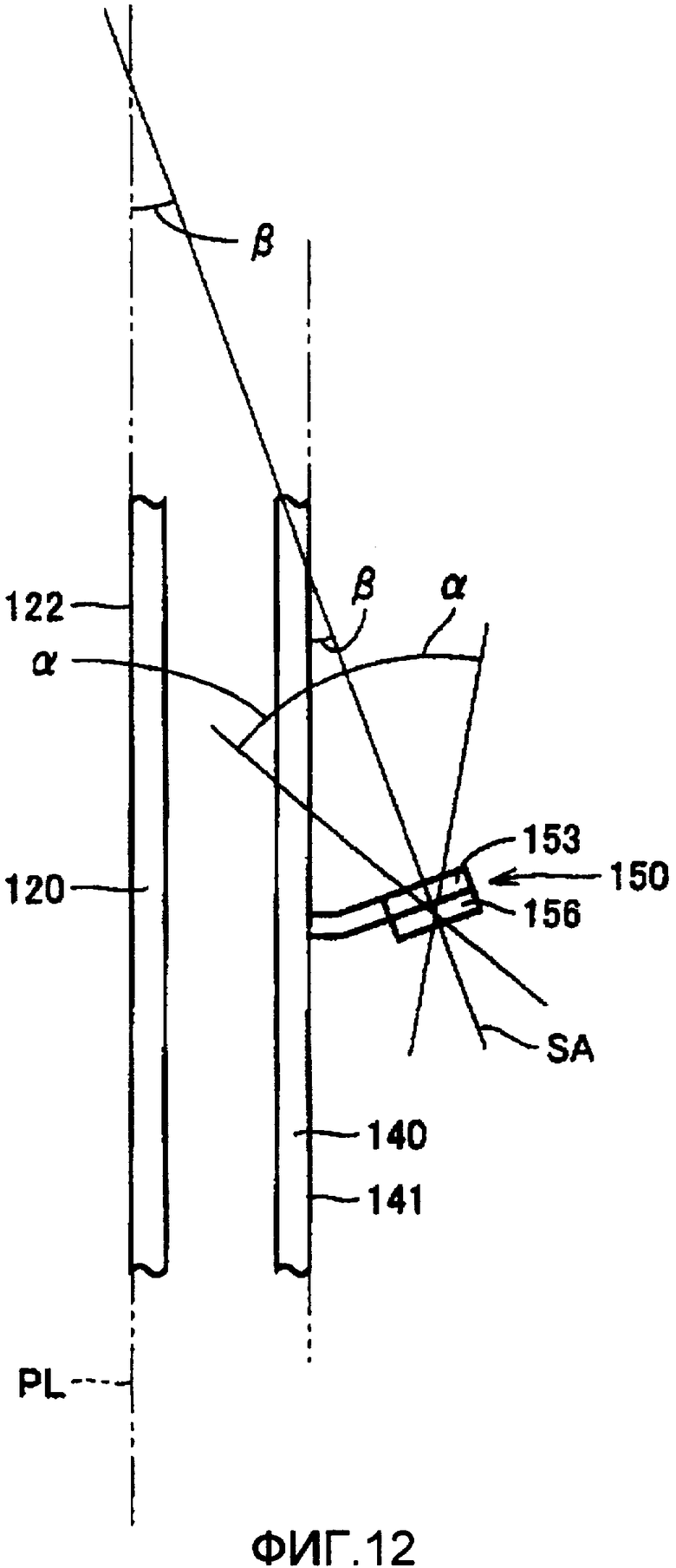
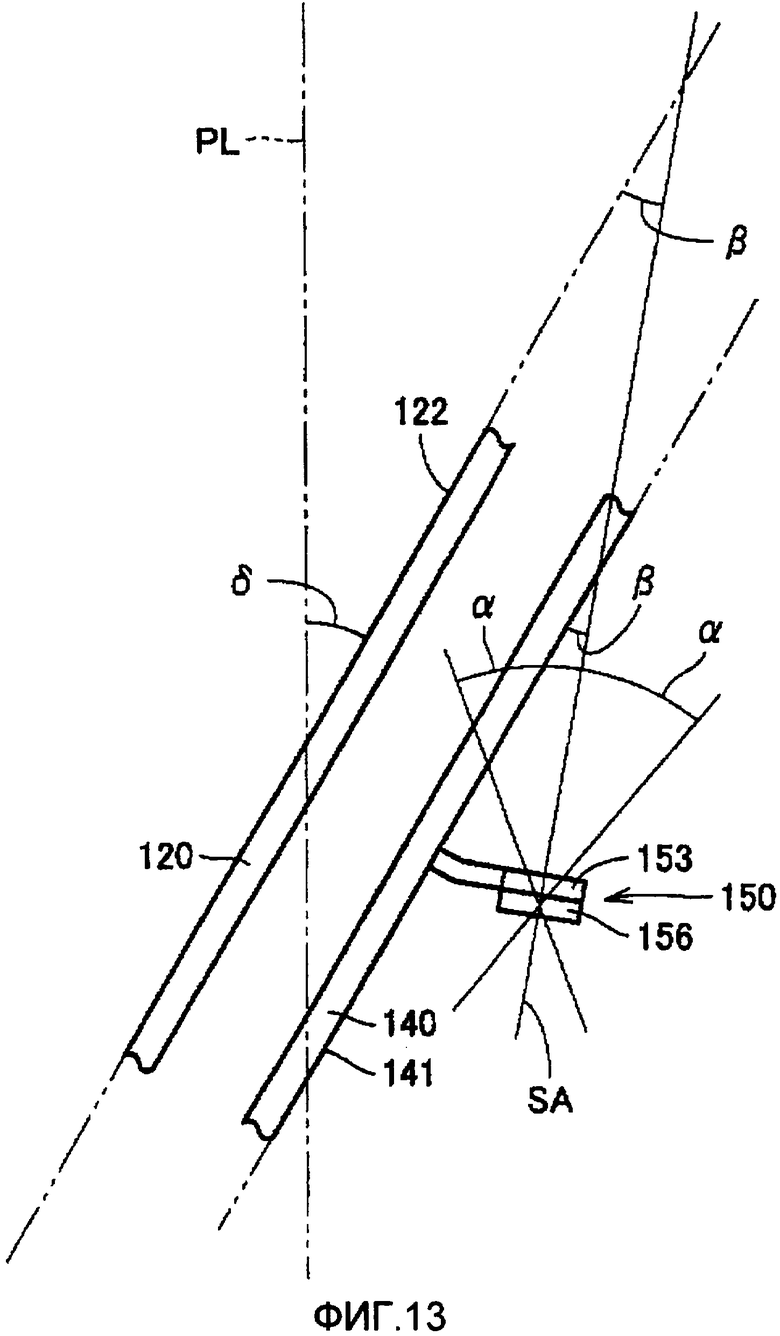
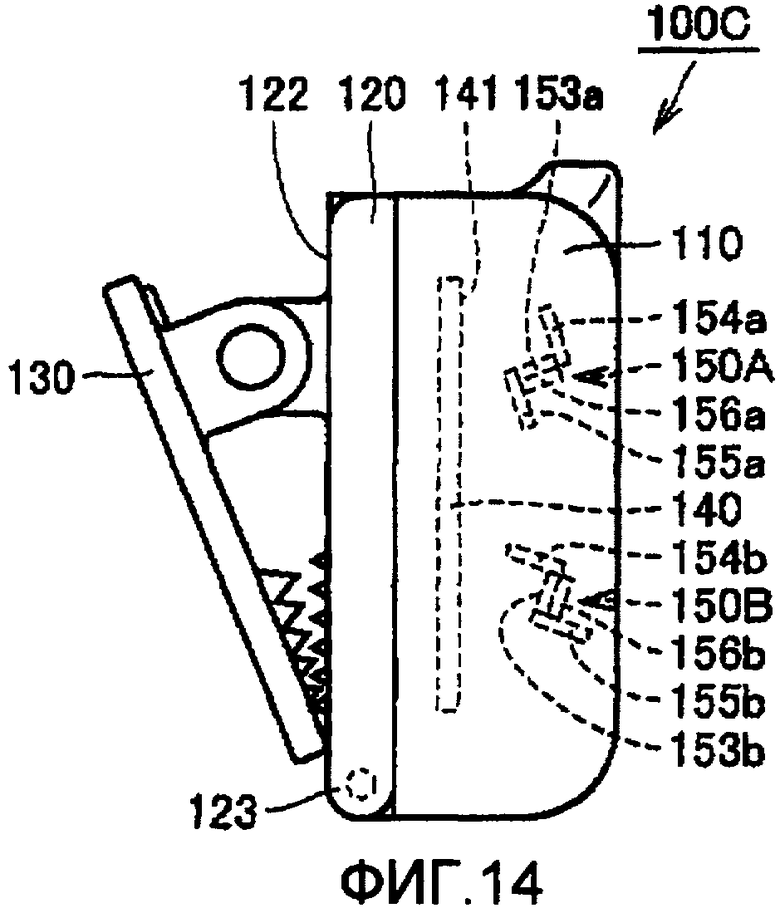
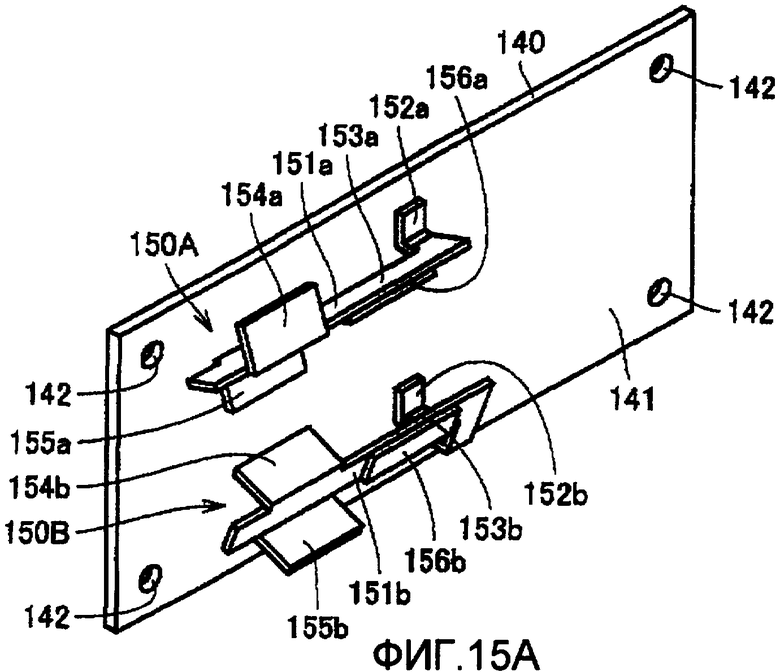
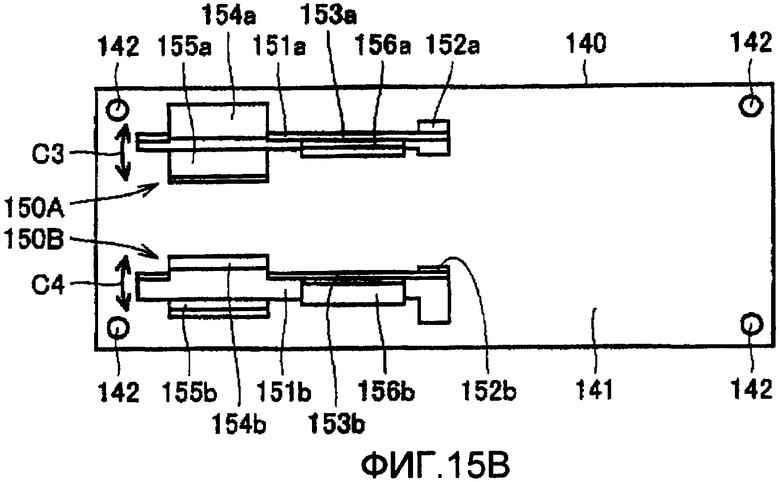
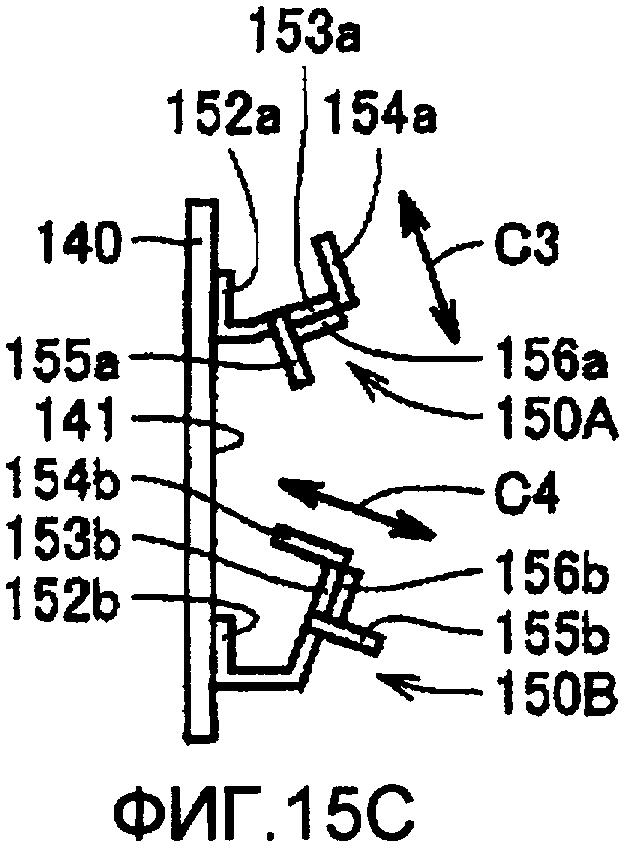
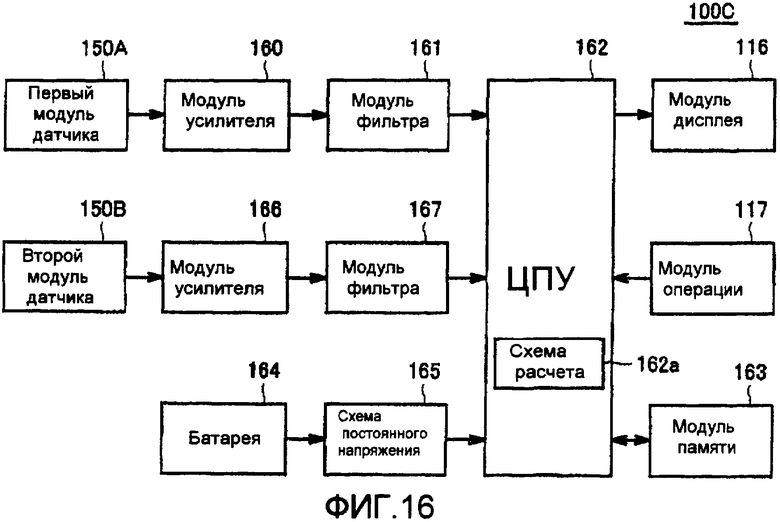
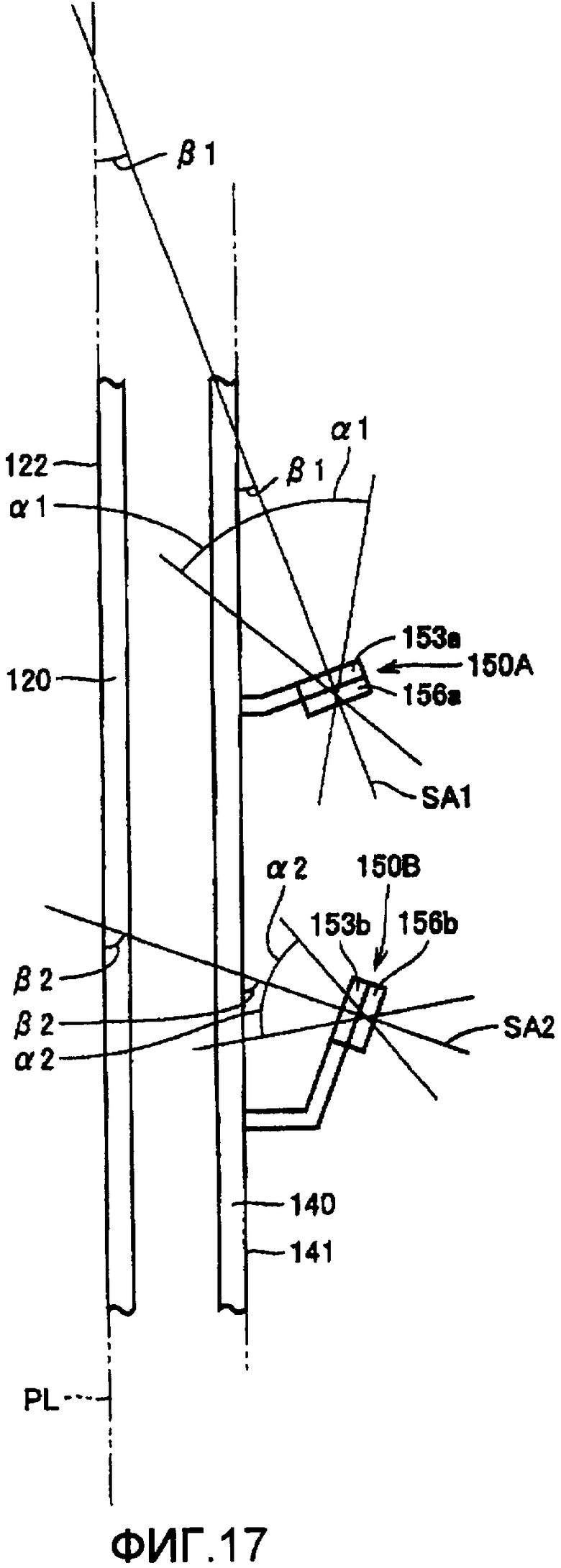



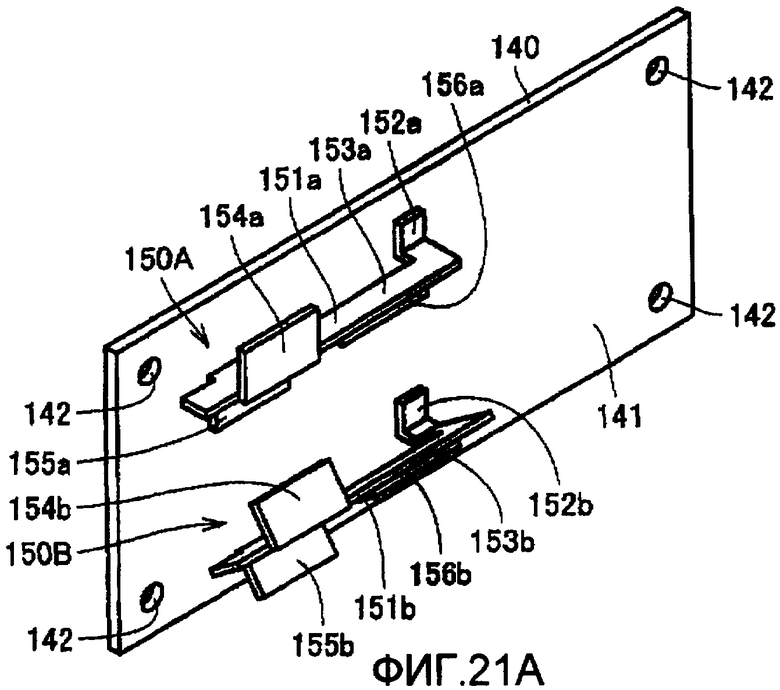
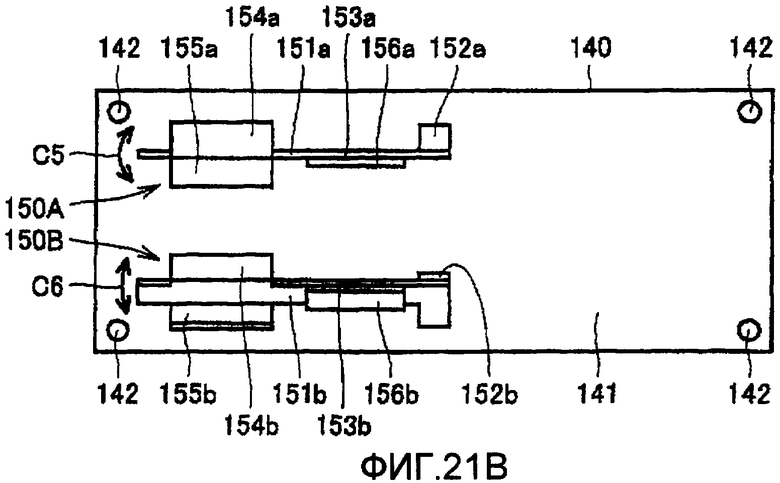
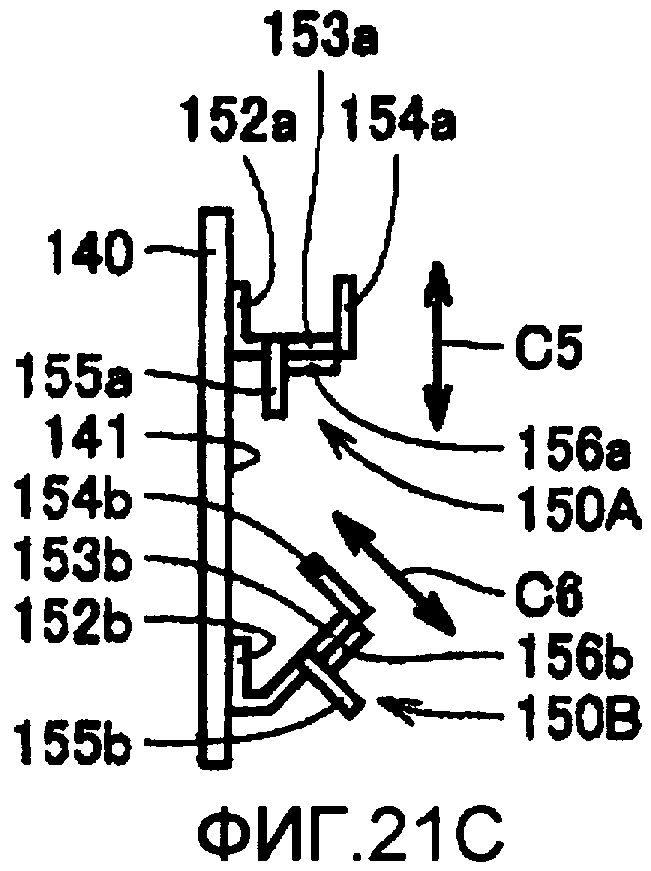


Изобретение относится к области приборостроения и может найти применение в системах детектирования движения контролируемого объекта. Цель изобретения - расширение функциональных возможностей. Для достижения данного результата шагомер содержит модуль датчика и корпус устройства, вмещающий модуль датчика. Ось детектирования датчика расположена с наклоном под углом относительно поверхности крепления к телу корпуса устройства. Угол наклона находится в пределах диапазона углов детектирования модуля датчика. В результате получают компактный и недорогостоящий шагомер, обеспечивающий снижение точности измерения в условиях возможных вариаций состояния его крепления, связанного с формой тела пользователя. 2 н. и 14 з.п. ф-лы, 23 ил.
1. Детектор движения тела, содержащий первый модуль детектирования движения тела, закрепленный и установленный для детектирования движения тела в заданном направлении оси детектирования, и корпус устройства, вмещающий первый модуль детектирования движения тела;
при этом:
ось детектирования первого модуля детектирования движения тела расположена с наклоном под первым углом наклона относительно поверхности крепления к телу корпуса устройства и
первый угол наклона находится в пределах диапазона углов детектирования первого модуля детектирования движения тела.
2. Детектор движения тела по п.1, в котором ось детектирования первого модуля детектирования движения тела расположена так, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
3. Детектор движения тела по п.1, в котором первый модуль детектирования движения тела включает в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент, прикрепленный к основной поверхности балочной части элемента в форме пластины.
4. Детектор движения тела по п.3, в котором:
первый модуль детектирования движения тела прикреплен к подложке проводки, которая расположена и закреплена внутри корпуса устройства;
основная поверхность балочной части расположена так, что она перпендикулярно пересекает основную поверхность подложки проводки; и основная поверхность подложки проводки расположена с наклоном под первым углом наклона относительно поверхности крепления корпуса устройства.
5. Детектор движения тела по п.3, в котором:
первый модуль детектирования движения тела прикреплен к подложке проводки, которая расположена и закреплена внутри корпуса устройства;
основная поверхность балочной части расположена с наклоном под первым углом наклона относительно основной поверхности подложки проводки и
основная поверхность подложки проводки расположена параллельно поверхности крепления корпуса устройства.
6. Детектор движения тела по п.5, в котором:
балочная часть включает в себя часть груза, расположенную стоящей от конца на стороне подложки проводки балочной части; и
часть груза продолжается в направлении удаления от подложки проводки в направлении дистального конца.
7. Детектор движения тела по п.1, дополнительно содержащий второй модуль детектирования движения тела, закрепленный и установленный так, что он детектирует движение тела в заданном направлении оси детектирования; при этом:
ось детектирования второго модуля детектирования движения тела расположена с наклоном под вторым углом наклона, который больше, чем первый угол наклона, относительно поверхности крепления корпуса устройства;
второй угол наклона не находится в диапазоне углов детектирования второго модуля детектирования движения тела и
диапазон детектирования первого модуля детектирования движения тела и диапазон детектирования второго модуля детектирования движения тела, по меньшей мере, частично перекрываются.
8. Детектор движения тела по п.7, в котором ось детектирования второго модуля детектирования движения тела расположена так, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
9. Детектор движения тела по п.7, в котором первый модуль детектирования движения тела и второй модуль детектирования движения тела, соответственно, включает в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент прикреплен к основной поверхности балочной части элемента в форме пластины.
10. Детектор движения тела по п.7, дополнительно содержащий модуль выбора, предназначенный для выбора того, какой выходной сигнал, выводимый из модуля детектирования движения тела первого модуля детектирования движения тела и второго модуля детектирования движения тела, выбрать для цели детектирования движения тела.
11. Детектор движения тела, содержащий первый модуль детектирования движения тела и второй модуль детектирования движения тела, закрепленные и установленные таким образом, чтобы детектировать движение тела в заданном направлении оси детектирования, и корпус устройства, вмещающий первый модуль детектирования движения тела и второй модуль движения тела; при этом:
ось детектирования первого модуля детектирования движения тела расположена параллельно поверхности крепления к телу корпуса устройства;
ось детектирования второго модуля детектирования движения тела расположена с наклоном под углом наклона относительно поверхности крепления корпуса устройства;
угол наклона не находится в пределах диапазона углов детектирования второго модуля детектирования движения тела и
диапазон детектирования первого модуля детектирования движения тела и диапазон детектирования второго модуля детектирования движения тела, по меньшей мере, частично перекрываются.
12. Детектор движения тела по п.11, в котором ось детектирования второго модуля детектирования движения тела расположена так, чтобы становиться ближе к поверхности крепления в направлении верхней части корпуса устройства.
13. Детектор движения тела по п.11, в котором первый модуль детектирования движения тела и второй модуль детектирования движения тела, соответственно, включает в себя элемент в форме пластины с балочной частью, которая изгибается при движении тела, и пьезоэлектрический элемент, прикрепленный к основной поверхности балочной части элемента в форме пластины.
14. Детектор движения тела по п.13, в котором:
первый модуль детектирования движения тела и второй модуль детектирования движения тела прикреплены к подложке проводки, расположенной и зафиксированной внутри корпуса устройства;
основная поверхность балочной части второго модуля детектирования движения тела расположена с наклоном под углом наклона относительно основной поверхности подложки проводки и
основная поверхность подложки проводки расположена параллельно поверхности крепления корпуса устройства.
15. Детектор движения тела по п.14, в котором:
балочная часть второго модуля детектирования движения тела включает в себя часть груза, расположенную стоящей от конца на стороне подложки проводки балочной части; и
часть груза продолжается в направлении удаления от подложки проводки в направлении дистального конца.
16. Детектор движения тела по п.11, дополнительно содержащий модуль выбора, предназначенный для выбора того, какой выходной сигнал, выводимый из модуля детектирования движения тела первого модуля детектирования движения тела и второго модуля детектирования движения тела, выбрать для цели детектирования движения тела.
| JP 7225242 А, 22.08.1995 | |||
| JP 2005157465 А, 16.06.2005 | |||
| JP 2002191580 А, 09.07.2002 | |||
| JP 11108948 А, 23.04.1999 | |||
| ШАГОМЕР | 1992 |
|
RU2068679C1 |
| Электронный шагомер | 1985 |
|
SU1303828A1 |

