Изобретение относится к способам, осуществляющим определение пространственного положения и энергии релятивистских частиц, потоков ионизирующего излучения и светового излучения. Изобретение может быть использовано для создания малоканальных позиционно-чувствительных датчиков, предназначенных для использования в физике высоких энергий, астрономии, астрофизике, спектроскопии ядерных частиц, а также в пороговых однофотонных системах обнаружения специального назначения.
Известен ряд способов определения пространственного положения и энергии релятивистских частиц и электромагнитного излучения.
Известен способ определения пространственного положения источника ионизирующего излучения (см. заявка KR №20070101458, МПК G01T 7/60, опубликована 17.10.2007), в котором поле детектора последовательно поэлементно сканируют с помощью матриц с пространственной зарядовой связью (ПЗС матриц). В процессе сканирования двумерные координаты частицы представляют в виде временной последовательности импульсов, поступающих с ПЗС матрицы.
Однако последовательное сканирование всего поля датчика неизбежно приводит к достаточно большим временам считывания (≥10-5 с) сигнала и не позволяет эффективно регистрировать быстрые процессы, т.е. работать в режиме реального времени.
С целью возможности работы в режиме реального времени используют различные варианты способа определения координат заряженных частиц по проекциям сигнала зарегистрированного события на ортогональные оси Х и Y. Этот способ определения пространственного положения релятивистских частиц основан на детектировании излучения с помощью двумерной пиксельной матрицы, составленной из приемных элементов, при том что электрический выход от каждого элемента подсоединен к периферийным электронным устройствам с помощью шин, параллельных соответствующим координатным осям Х и Y.
Так известен способ измерения координат гамма-квантов (см. заявка US №820050006589, МПК G01T 1/00, опубликована 13.01.2005), в соответствии с которым квант направляют на пиксельную матрицу, сформированную из полос сцинтилляционных кристаллов. При этом каждый сцинтилляционный пиксель связан с фотосенсорами, расположенными параллельно координатным осям Х и Y. В результате взаимодействия гамма-кванта с соответствующим пикселем матрицы сцинтилляторов возникает вторичное излучение, которое регистрируют соответствующими фотосенсорами и определяют, таким образом, координаты сигнала.
Недостатком этого способа является формирование сцинтилляционной матрицы из монокристаллов, характерные размеры которых не могут обеспечить малых размеров единичного пикселя и, соответственно, высокого разрешения. Кроме того, связь каждого пикселя в описанном способе с фотосенсорами обуславливает неизбежную многоканальность метода.
Для снижения размеров единичного пикселя регистрирующей матрицы и повышения ее разрешения предложены различные модификации способа определения координат заряженных частиц по проекциям сигнала зарегистрированного события на ортогональные оси Х и Y. Так, в настоящее время широко используется способ (см. Z. U, Novel silicon stripixel detector: concept, simulation, design, and fabrication. - Nuclear instruments and Methods in Physics Research. - A 518, 2004, p.p.738-753), в котором устанавливают на пути заряженной частицы стрипсельную матрицу, выполненную в виде сетки фотоприемников (диодов, транзисторов и т.п.). Координаты заряженной частицы определяют путем регистрации взаимодействия заряженной частицы со стрипиксельной матрицей, которую предварительно формируют в виде сетки фотоприемников (диодов, транзисторов и т.д.). При этом фотоприемники располагают на 2-х перпендикулярных полосах, которые имеют независимые контактные выводы к сигнальным шинам, параллельным соответствующим полосам, т.е. координатным осям Х и Y.
Однако и в этом способе сохраняется принципиальный недостаток метода определения координат события по проекциям сигнала на ортогональные оси Х и Y: сохраняется многоканальность системы вывода и обработки электрических сигналов, что обуславливает необходимость формирования контактной сетки и многоканальной системы вторичных электронных устройств с высокой плотностью интеграции, предназначенных для съема информации. В настоящее время число выходных каналов детекторов, использующих этот способ определения координат, варьируется от 32 до нескольких тысяч. Так, например, стрипиксельный детектор размером 70×53 мм2 производства фирмы Hamamtsu, используемый в международной программе "PAMELA", имеет 1024+1024 канала (см. P.Picozza, A.M.Gaiper, G.Castellini et al. - Astroparticie Physics. - 27, 2007, p.p.296-315). Большая степень многоканальности требует создания габаритных периферийных устройств и увеличивает необходимый объем регистрирующих систем, что является серьезным ограничивающим фактором в условиях космических экспериментов. Особенно серьезные ограничения эта проблема накладывает на использование позиционно-чувствительных ФЭУ в качестве бортовых устройств специального назначения. Кроме того, высокая плотность контактной сетки и большая суммарная длина контактных дорожек вызывает повышение рабочей температуры детектора, обуславливающее резкое возрастание уровня шумов. Требование к снижению уровня шумов при работе детекторов с малыми размерами пикселей приводит к необходимости их эксплуатации при пониженных температурах, что также резко снижает области их использования.
Известен способ определения двумерных координат события на плоскости (см. патент US 7175095, МПК G06K 19/06, опубликован 13.02.2007), основанный на установлении взаимно однозначного соответствия между положением на плоскости единичного элемента регистрирующей матрицы и введенным индивидуальным признаком этого элемента. В этом способе регистрирующая плоскость разбивается на множество единичных элементов, содержащих несколько пикселей. Внутри каждого из элементов формируют пиксели, характеризующиеся различным сочетанием двух параметров, таких как расположение пикселей внутри единичного элемента и их размер, или их расположение и цвет, или их расположение и форма и др. Изображения всех единичных элементов оптически сводят на сканирующую ПЗС матрицу, сигнал с которой анализируют с помощью соответствующей программы декодирования.
В известном способе поле сканирования ПЗС матрицы сокращается до размеров единичного элемента, содержащего несколько пикселей. Кроме того, при реализации этого способа определение двумерных координат на плоскости не требует многоканальной системы детектирования. Однако необходимость сканирования изображения с помощью ПЗС матрицы все равно снижает быстродействие метода и не позволяет работать в реальном масштабе времени.
Наиболее близким по назначению и совокупности существенных признаков к заявляемому техническому решению является способ определения координат частиц (см. заявка US №2008017805, МПК G01T 1/18, опубликован 24.01.2008), принятый за прототип, в котором двумерные координаты частиц на плоскости определяют в реальном масштабе времени путем введения взаимно однозначного соответствия между координатой события на плоскости мишени и заранее установленными номерами электродов локальной и глобальной сетей системы вывода информации.
Положение частицы на плоскости в прототипе определяется следующим образом. На пути заряженных частиц размещают регистрирующую матрицу, изготовленную из чувствительных к попаданию регистрируемой частицы единичных элементов, сформированных из позиционно-чувствительных электродов, имеющих двухуровневую организацию, где первый уровень составлен из локальных электродов для определения локального положения частиц, а второй уровень составлен из глобальных электродов для определения глобального положения частиц, причем каждому единичному элементу с координатами xi, yi соответствуют номера локального и глобального электродов, соответствующие координатам единичного элемента в матрице и записанные в памяти регистрирующего устройства; направляют возникающие от попадания заряженной частицы в матрицу электроны и ионы к локальным и к глобальным позиционно-чувствительным электродам. В результате на ближайших к этой точке локальном и глобальном электродах возникают электрические сигналы. В регистрирующем устройстве принимают выходную информацию от  каналов, где N равно числу всех локальных электродов. В регистрирующем устройстве сравнивают электрические сигналы с записанными в регистрирующем устройстве номерами локальных и глобальных электродов. В результате сопоставления комбинации номеров локального и глобального электродов определяют пространственное положение локального электрода, на котором возник сигнал, и тем самым определяются координаты события.
каналов, где N равно числу всех локальных электродов. В регистрирующем устройстве сравнивают электрические сигналы с записанными в регистрирующем устройстве номерами локальных и глобальных электродов. В результате сопоставления комбинации номеров локального и глобального электродов определяют пространственное положение локального электрода, на котором возник сигнал, и тем самым определяются координаты события.
Разделение системы съема информации на локальный и глобальный уровни позволяет устанавливать координату события в реальном времени при сокращении числа каналов вывода информации в n раз, где  , a N - число локальных электродов. Однако такое сокращение числа выходных каналов оставляет этот метод в рамках многоканальных способов съема информации. Кроме того, в этом случае на поверхности детектора остается контактная сетка, необходимая для подсоединения локальных электродов к локальным шинам и глобальным электродам, а также контактная сетка вывода информации с локальных и глобальных электродов. В результате даже при достижении описанной в патенте плотности контактов разрешающая способность (фактический размер пикселя) достигает 400 мкм.
, a N - число локальных электродов. Однако такое сокращение числа выходных каналов оставляет этот метод в рамках многоканальных способов съема информации. Кроме того, в этом случае на поверхности детектора остается контактная сетка, необходимая для подсоединения локальных электродов к локальным шинам и глобальным электродам, а также контактная сетка вывода информации с локальных и глобальных электродов. В результате даже при достижении описанной в патенте плотности контактов разрешающая способность (фактический размер пикселя) достигает 400 мкм.
Задачей, на решение которой направлено изобретение, является разработка такого способа определения координат заряженных частиц, который бы позволил сократить количество каналов передачи информации до трех каналов вне зависимости от числа пикселей регистрирующей матрицы, а также устранить считывающие электроды на поверхности регистрирующей мишени и тем самым увеличить коэффициент заполнения площади мишени чувствительными элементами при сохранении возможности работы в режиме реального времени.
Поставленная задача решается тем, что способ определения координат заряженных частиц включает размещение на пути заряженных частиц регистрирующей матрицы, составленной из N·N регулярно расположенных элементов, каждый из которых выполнен из трех типов люминофоров, отличающихся длиной волны максимума излучения. Каждому элементу i (где i=1, 2, 3…N) с координатами xi, yi соответствует единственное соотношение концентраций аi/bi/сi трех люминофоров,
где
аi - концентрация первого люминофора в i-м элементе;
bi - концентрация второго люминофора в i-м элементе;
сi - концентрация третьего люминофора в i-м элементе;
соответствующее координатам элемента i в матрице и записанное в памяти регистрирующего устройства. Каждый из люминофоров излучает свет в своей спектральной области с интенсивностью, пропорциональной его концентрации в данной точке. Направляют возникающее от попадания заряженной частицы в матрицу люминесцентное излучение люминофоров на три фотоприемника, имеющих селективные коэффициенты спектральной чувствительности na, nb, nc, согласованные с длиной волны максимума излучения соответствующих люминофоров и записанные в памяти регистрирующего устройства. Выходные сигналы S1, S2, S3 фотоприемников подают в регистрирующее устройство, в котором эти сигналы суммируют и нормируют на значение полученной суммы и получают значения S1норм, S2норм, S3норм. Определяют в регистрирующем устройстве величины k1=S1норм/na, k2=S2норм/nb, k3=S3норм/nс. Сравнивают соотношение полученных величин k1/k2/k3 с записанными в регистрирующем устройстве соотношениями концентраций трех люминофоров ai/bi/ci, с помощью чего определяют координаты заряженной частицы x, y по координате того i-го элемента, соотношение концентраций ai/bi/ci которого совпадает с соотношением полученных величин k1/k2/k3.
Заявляемый способ основан на том, что двумерные координаты частиц на плоскости определяют путем введения взаимно однозначного соответствия между заранее установленным соотношением концентраций трех различных сцинтилляторов ai/bi/ci в каждом i-м единичном элементе и координатами этого элемента на плоскости мишени. Таким образом, исключается необходимость формирования на поверхности регистрирующей матрицы считывающих электродов. Кроме того, при любом количестве N·N регулярно расположенных элементов регистрирующей матрицы использование 3-х люминофоров является необходимым и достаточным для получения однозначной информации о координатах события инвариантно к энергии падающего излучения. В результате число выходных каналов для любого числа элементов регистрирующей матрицы равно трем. Набору выходных сигналов S1, S2, S3 соответствует единственная точка мишени xi, yi и единственная величина энергии S. При этом сохраняется возможность регистрации координат событий в режиме реального времени.
Заявляемый способ определения координат заряженных частиц поясняется чертежом, где
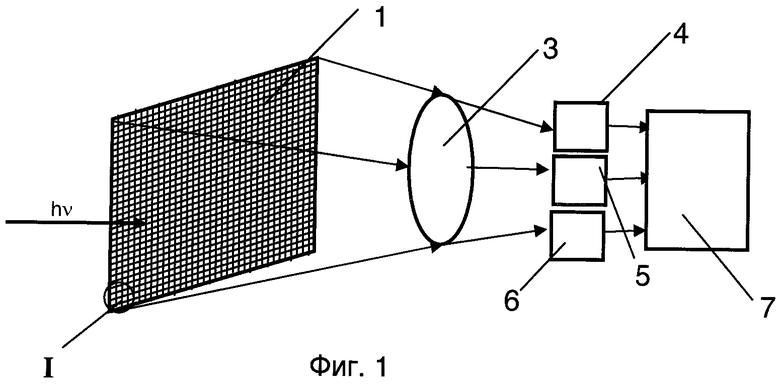
на фиг.1 показана схема устройства, реализующая заявляемый способ;
на фиг.2 изображен в увеличенном масштабе участок регистрирующей матрицы.
Устройство включает: регистрирующую матрицу 1, составленную из N·N элементов 2, фокусирующее устройство 3, три фотоприемника 4, 5, 6 соответственно и регистрирующее устройство 7.
Способ осуществляют следующим образом (см. фиг.1, фиг.2). На пути потока частиц размещают регистрирующую матрицу 1, составленную из N·N элементов 2, которые формируют нанесением трех люминофоров с различной длиной волны в максимуме излучения, высокой эффективностью люминисценции и малым временем высвечивания всех трех люминофоров, что обеспечивает возможность работы детектора в режиме реального времени. Нанесение люминофоров можно проводить, например, последовательным вакуумным напылением через маску таким образом, что концентрация аi пропорциональна координате X, концентрация bi, пропорциональна координате Y, а концентрация ci изменяется по закону сi=хi 2+уi 2. В результате в матрице 1 каждому i-му элементу 2 (где i=1, 2, 3…10) с координатами xi, yi соответствует единственное соотношение концентраций аi/bi/сi трех люминофоров. Люминесцентное излучение люминофоров, возникающее от попадания заряженной частицы в матрицу 1 через фокусирующее устройство 3, направляют на три стандартных фотоприемника 4, 5, 6, имеющих селективные коэффициенты спектральной чувствительности nа, nb, nc соответственно, согласованные с длиной волны максимума излучения соответствующих люминофоров и записанные в памяти регистрирующего устройства 7. Возникающие на выходе фотоприемников 4, 5, 6 сигналы S1, S2, S3 подают в регистрирующее устройство 7, в котором эти сигналы суммируются и нормируются на значение полученной суммы. Нормировка производится для исключения зависимости величины выходного сигнала от энергии регистрируемой частицы. В результате получают значения S1норм, S2норм, S3норм и определяют в регистрирующем устройстве 7 величины k1=S1норм/na, k2=S2норм/nb, k3=S3норм/nc. Сравнивают соотношение полученных величин k1/k2/k3 с записанными в регистрирующем устройстве 7 соотношениями концентраций трех люминофоров ai/bi/ci, с помощью чего определяют координаты заряженной частицы x, y по координате того i-го элемента 2, соотношение концентраций ai/bi/ci которого совпадает с соотношением полученных величин k1/k2/k3. Таким образом, исключается необходимость формирования на поверхности регистрирующей матрицы считывающих электродов. Кроме того, при любом количестве N·N регулярно расположенных элементов 2 регистрирующей матрицы 1 использование 3-х люминофоров является необходимым и достаточным для получения однозначной информации о координатах события инвариантно к энергии падающего излучения. В результате число выходных каналов для любого числа элементов 2 регистрирующей матрицы 1 равно трем. Набору выходных сигналов S1, S2, S3 соответствует единственная точка регистрирующей матрицы 1 и единственная величина энергии. При этом сохраняется возможность регистрации координат событий в режиме реального времени.
Пример. Способ был осуществлен при регистрации координат потока гамма-излучения с энергией 10-100 МэВ на регистрирующей матрице. На пути потока электронов размещалась регистрирующая матрица, составленная из 32·32 элементов, которая была сформирована в результате нанесения трех люминофоров: германата висмута (Вi4Gе3O12, далее BGO), вольфрамата свинца (PbWO4, далее PWO) и селенида цинка с изовалентной примесью теллура (ZnSe(Te)). Максимум излучения каждого из этих люминофоров имеет различную длину волны при достаточной высокой эффективности люминесценции: λmax BGO=320 нм (5·104 фотон/МэВ), λmax PWO=450 нм (18·104 фотон/МэВ) и λmax ZnSe(Te)=610 нм (8·104 фотон/МэВ). Малое время высвечивания всех трех люминофоров (5нс, 6нс и 3нс соответственно) обеспечивает возможность работы детектора в режиме реального времени. Нанесение люминофоров проводилось последовательным вакуумным напылением через маску таким образом, что концентрация BGO (аi) пропорциональна координате X, концентрация PWO (bi) пропорциональна координате Y, а концентрация ZnSe(Te) (сi) изменяется по закону сi=хi 2+уi 2. В результате в матрице каждому элементу i (где i=1, 2, 3…10) с координатами xi, yi соответствует единственное соотношение концентраций аi/bi/сi трех люминофоров. Люминесцентное излучение люминофоров, возникающее от попадания заряженной частицы в матрицу, направляли через собирающую линзу на три стандартных фотоприемника, имеющих селективные коэффициенты спектральной чувствительности nа=0.25 А/Вт, nb=0.3 А/Вт, nс=0.4 А/Вт, согласованные с длиной волны максимума излучения соответствующих люминофоров и записанные в памяти регистрирующего устройства. Эти фотоприемники представляли собой кремниевые фотодиоды фирмы Edmund Optics с нанесенными на них интерференционными фильтрами «Narrow bandpass IF» фирмы Edmund Optics. Возникающие на выходе фотоприемников сигналы S1, S2, S3 подавали в регистрирующее устройство, в котором эти сигналы суммировались и нормировались на значение полученной суммы, получая значения S1норм, S2норм, S3норм. В результате в регистрирующем устройстве происходило определение величин k1=S1норм/na, k2=S2норм/nb, k3=S3норм/nc и сравнение соотношения полученных величин k1/k2/k3 с записанными в регистрирующем устройстве соотношениями концентраций трех люминофоров ai/bi/ci с помощью чего определяют координаты заряженной частицы x, y по координате того i-го элемента, соотношение концентраций ai/bi/ci, которого совпадает с соотношением полученных величин k1/k2/k3.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЛЕНГАТОР ОПТИЧЕСКОГО ДИАПАЗОНА | 2008 |
|
RU2357271C1 |
| СПОСОБ СКРЫТОЙ ПЕРЕДАЧИ ЗАШИФРОВАННОЙ ИНФОРМАЦИИ ПО МНОЖЕСТВУ КАНАЛОВ СВЯЗИ | 2011 |
|
RU2462825C1 |
| ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ УГЛОВЫХ КООРДИНАТ | 2008 |
|
RU2357270C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОГО ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 2018 |
|
RU2720604C1 |
| Способ формирования видеосигнала на кристалле сенсора, изготовленном по технологии КМОП | 2019 |
|
RU2709461C1 |
| СПОСОБ ПРОИЗВОДСТВА ЛИСТОВОГО ПРОКАТА ИЗ МАЛОПЕРЛИТНОЙ СТАЛИ | 1992 |
|
RU2060846C1 |
| СПОСОБ ФОРМИРОВАНИЯ СТРУКТУРИРОВАННОГО СЦИНТИЛЛЯТОРА НА ПОВЕРХНОСТИ ПИКСЕЛИРОВАННОГО ФОТОПРИЕМНИКА (ВАРИАНТЫ) И СЦИНТИЛЛЯЦИОННЫЙ ДЕТЕКТОР, ПОЛУЧЕНННЫЙ ДАННЫМ СПОСОБОМ (ВАРИАНТЫ) | 2013 |
|
RU2532645C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ НЕФТЯНЫХ ЗАГРЯЗНЕНИЙ НА ЗЕМНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2539784C2 |
| СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ОПТИЧЕСКИ АКТИВНЫХ ВЕЩЕСТВ В РАСТВОРАХ (ВАРИАНТЫ) | 2002 |
|
RU2234693C2 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ | 2016 |
|
RU2638580C1 |
Изобретение относится к способам, осуществляющим определение пространственного положения и энергии релятивистских частиц, потоков ионизирующего излучения и светового излучения. Способ определения координат заряженных частиц включает размещение на пути заряженных частиц регистрирующей матрицы, составленной из N·N регулярно расположенных элементов. Каждый элемент выполнен из трех типов люминофоров, отличающихся длиной волны максимума излучения, причем каждому i-му элементу, (где i=l, 2, 3…N) с координатами хi, yi соответствует единственное соотношение концентраций a/b/c трех люминофоров, соответствующее координатам i-го элемента в матрице и записанное в памяти регистрирующего устройства. Направляют возникающее от попадания заряженной частицы в матрицу люминесцентное излучение люминофоров на три фотоприемника, имеющих селективные коэффициенты спектральной чувствительности na, nb, nс, согласованные с длиной волны максимума излучения соответствующих люминофоров и записанные в памяти регистрирующего устройства. Выходные сигналы S1, S2, S3 фотоприемников подают в регистрирующее устройство, в котором эти сигналы суммируют, нормируют на значение полученной суммы и получают значения S1норм, S2норм, S3норм, определяют в регистрирующем устройстве величины
k1=S1норм/na, k2=S2норм/nb, k3=S3норм/nc.
Сравнивают соотношение полученных величин k1/k2/k3 с записанными в регистрирующем устройстве соотношениями концентраций трех люминофоров ai/bi/ci. Определяют координаты заряженной частицы x, y по координате того i-го элемента, соотношение концентраций ai/bi/ci которого совпадает с соотношением полученных величин k1/k2/k3. 2 ил.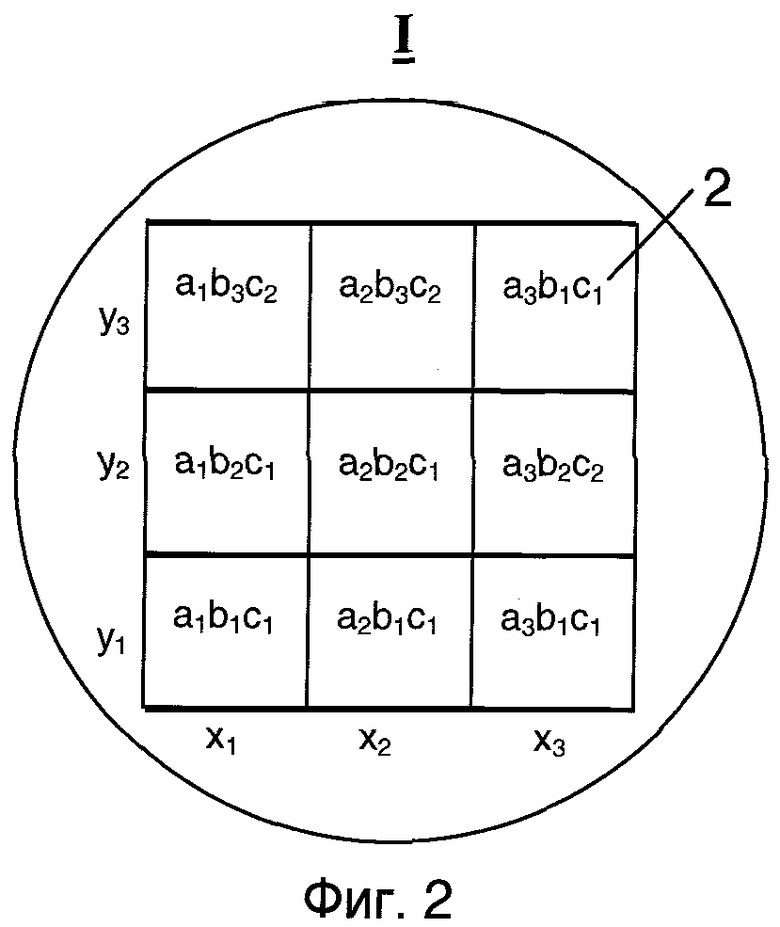
Способ определения координат заряженных частиц, включающий размещение на пути заряженных частиц регистрирующей матрицы, составленной из N·N регулярно расположенных элементов, каждый из которых выполнен из трех типов люминофоров, отличающихся длиной волны максимума излучения, причем каждому i-му элементу (где i=1, 2, 3…N) с координатами xi, у соответствует единственное соотношение концентраций a/b/c трех люминофоров,
где аi - концентрация первого люминофора в i-м элементе;
bi - концентрация второго люминофора в i-м элементе;
ci - концентрация третьего люминофора в i-м элементе,
соответствующее координатам i-го элемента в матрице и записанное в памяти регистрирующего устройства; направляют возникающее от попадания заряженной частицы в матрицу люминесцентное излучение люминофоров на три фотоприемника, имеющих селективные коэффициенты спектральной чувствительности nа, nb, nс, согласованные с длиной волны максимума излучения соответствующих люминофоров и записанные в памяти регистрирующего устройства; выходные сигналы S1, S2, S3 фотоприемников подают в регистрирующее устройство, в котором эти сигналы суммируют, нормируют на значение полученной суммы и получают значения S1норм,
S2норм, S3норм; определяют в регистрирующем устройстве величины k1=S1норм/na,
k2=S2норм/nb, k3=S3норм/nс; сравнивают соотношение полученных величин k1/k2/k3 с записанными в регистрирующем устройстве соотношениями концентраций трех люминофоров ai/bi/ci, с помощью чего определяют координаты заряженной частицы x, у по координате того i-го элемента, соотношение концентраций ai/bi/ci которого совпадает с соотношением полученных величин k1/k2/k3.
| US 2008017805 A1, 24.01.2008 | |||
| WO 2008133710 A2, 06.11.2008 | |||
| СПОСОБ РЕГИСТРАЦИИ ИЗЛУЧЕНИЯ | 1999 |
|
RU2150130C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ЗАРЯЖЕННЫХ ЧАСТИЦ | 1992 |
|
RU2084927C1 |

