Изобретение относится к оптической технике и может быть использовано для определения угловых координат различных удаленных отражающих или излучающих в оптическом диапазоне объектов.
Известен угломерный инструмент, называемый астрономическим посохом [1], представляющий собой трость с визиром и с нанесенной вдоль трости шкалой. На трости укреплена с возможностью перемещения вдоль трости поперечная планка с двумя визирами на ее концах. Передвигая поперечную планку вдоль трости, необходимо совместить визир, находящийся на трости у глаза наблюдателя, и визир на левом конце поперечной планки таким образом, чтобы они совпали с направлением на первую звезду, а визир, находящийся у глаза наблюдателя, и визир на правом конце поперечной планки необходимо совместить таким образом, чтобы они совпали с направлением на вторую звезду. Отсчет положения поперечной планки по шкале, нанесенной на трость, дает угловое расстояние между звездами. Недостаток известного технического решения заключается в низкой точности измерений.
Известны также многочисленные варианты угломерных устройств, например, теодолиты [2], гониометры [3], секстанты [4], в которых измерение углов осуществляется с помощью угловой шкалы или ее части. Недостатком таких устройств является низкая точность измерений.
Известны различные варианты оптических пеленгаторов, например, описанное в [5] техническое решение, в котором малое зеркало телескопа, приводимое в движение электродвигателем, осуществляет круговое движение сфокусированного пятна по матрице фотоприемников. Подсветка объекта осуществляется импульсным лазером. Система обработки осуществляет подсчет числа импульсов на выходе каждого элемента матрицы фотоприемников и рассчитывает угловые координаты объекта. Недостатки описанного пеленгатора заключаются в низком быстродействии, обусловленном необходимостью механического движения малого зеркала телескопа и сложностью обработки сигналов с матрицы фотоприемников.
Наиболее близким по технической сущности к заявленному устройству является описанный в [6] оптический пеленгатор, содержащий фокусирующую приемную оптическую систему, два светоделителя, два фильтра, три фотоприемника, два усилителя, блок определения координаты Y, блок определения координаты X, фокусирующая приемная оптическая система, первый светоделитель, второй светоделитель и третий фотоприемник последовательно расположены на оптической оси, первый фильтр расположен на пути отраженного от первого светоделителя луча, второй фильтр расположен на пути отраженного от второго светоделителя луча, первый фотоприемник расположен на пути прошедшего через первый фильтр луча, выход первого фотоприемника соединен с входом первого усилителя, выход первого усилителя соединен с первым входом блока определения координаты Y, второй фотоприемник расположен на пути прошедшего через второй фильтр луча, выход второго фотоприемника соединен с входом второго усилителя, выход второго усилителя соединен с первым входом блока определения координаты X, выход третьего фотоприемника соединен с вторым входом блока определения координаты Y и вторым входом блока определения координаты X, градиент прозрачности первого фильтра параллелен оси Y, градиент прозрачности второго фильтра параллелен оси X. Недостаток известного оптического пеленгатора заключается в низкой достоверности измерений, что обусловлено появлением погрешности измерений при нахождении в поле зрения фокусирующей приемной оптической системы более одного отражающего (или светящегося) объекта.
Задачей изобретения является повышение достоверности измерений.
Решение поставленной задачи достигается тем, что в известном устройстве, содержащем фокусирующую приемную оптическую систему, два светоделителя, два фильтра, три фотоприемника, два усилителя, блок определения координаты Y, блок определения координаты X, фокусирующая приемная оптическая система, первый светоделитель, второй светоделитель и третий фотоприемник последовательно расположены на оптической оси, первый фильтр расположен на пути отраженного от первого светоделителя луча, второй фильтр расположен на пути отраженного от второго светоделителя луча, первый фотоприемник расположен на пути прошедшего через первый фильтр луча, выход первого фотоприемника соединен с входом первого усилителя, выход первого усилителя соединен с первым входом блока определения координаты Y, второй фотоприемник расположен на пути прошедшего через второй фильтр луча, выход второго фотоприемника соединен с входом второго усилителя, выход второго усилителя соединен с первым входом блока определения координаты X, выход третьего фотоприемника соединен с вторым входом блока определения координаты Y и вторым входом блока определения координаты X, градиент прозрачности первого фильтра параллелен оси Y, градиент прозрачности второго фильтра параллелен оси X, внесены следующие усовершенствования: оно дополнительно содержит третий светоделитель, окуляр, три диафрагмы, три привода диафрагмы, блок управления, первая диафрагма расположена в плоскости перетяжки луча между первым светоделителем и первым фильтром, вторая диафрагма расположена в плоскости перетяжки луча между вторым светоделителем и вторым фильтром, третья диафрагма расположена в плоскости перетяжки прошедшего через второй светоделитель луча, третий светоделитель расположен на пути прошедшего через третью диафрагму луча между третьей диафрагмой и третьим фотоприемником, первый выход блока управления соединен с входом первого привода диафрагмы, выход первого привода диафрагмы соединен с управляющим входом первой диафрагмы, второй выход блока управления соединен с входом второго привода диафрагмы, выход второго привода диафрагмы соединен с управляющим входом второй диафрагмы, третий выход блока управления соединен с входом третьего привода диафрагмы, выход третьего привода диафрагмы соединен с управляющим входом третьей диафрагмы, окуляр расположен на пути отраженного от третьего светоделителя луча.
Такое построение заявленного устройства обеспечивает повышение достоверности измерений за счет обеспечения возможности выбирать с помощью диафрагм один объект, угловые координаты которого необходимо измерить. При этом приводы диафрагм обеспечивают им возможность одинакового во всех трех диафрагмах изменения размера отверстия и их пространственного положения в плоскостях перетяжки соответствующих лучей.
Сущность заявленного оптического пеленгатора поясняется описанием конкретного варианта выполнения и прилагаемым чертежом, на котором приведена схема заявленного устройства.
Заявленный оптический измеритель угловых координат содержит фокусирующую приемную оптическую систему 1, два светоделителя 2 и 3, два фильтра 4 и 5, три фотоприемника 6, 7 и 8, два усилителя 9 и 10, блок 11 определения координаты Y, блок 12 определения координаты X, фокусирующая приемная оптическая система 1, первый светоделитель 2, второй светоделитель 3 и третий фотоприемник 8 последовательно расположены на оптической оси, первый фильтр 4 расположен на пути отраженного от первого светоделителя 2 луча, второй фильтр 5 расположен на пути отраженного от второго светоделителя 3 луча, первый фотоприемник 6 расположен на пути прошедшего через первый фильтр 4 луча, выход первого фотоприемника 6 соединен с входом первого усилителя 9, выход первого усилителя 9 соединен с первым входом блока 11 определения координаты Y, второй фотоприемник 7 расположен на пути прошедшего через второй фильтр 5 луча, выход второго фотоприемника 7 соединен с входом второго усилителя 10, выход второго усилителя 10 соединен с первым входом блока 12 определения координаты X, выход третьего фотоприемника 8 соединен с вторым входом блока 11 определения координаты Y и вторым входом блока 12 определения координаты X, градиент прозрачности первого фильтра 4 параллелен оси Y, градиент прозрачности второго фильтра 5 параллелен оси X. Заявленный оптический измеритель угловых координат также содержит третий светоделитель 13, окуляр 14, три диафрагмы 15, 16 и 17, три привода диафрагмы 18, 19 и 20, блок управления 21, первая диафрагма 15 расположена в плоскости перетяжки луча между первым светоделителем 2 и первым фильтром 4, вторая диафрагма 16 расположена в плоскости перетяжки луча между вторым светоделителем 3 и вторым фильтром 5, третья диафрагма 17 расположена в плоскости перетяжки прошедшего через второй светоделитель 3 луча, третий светоделитель 13 расположен на пути прошедшего через третью диафрагму 17 луча между третьей диафрагмой 17 и третьим фотоприемником 8, первый выход блока управления 21 соединен с входом первого привода 18 диафрагмы, выход первого привода 18 диафрагмы соединен с управляющим входом первой диафрагмы 15, второй выход блока управления 21 соединен с входом второго привода 19 диафрагмы, выход второго привода 19 диафрагмы соединен с управляющим входом второй диафрагмы 16, третий выход блока управления 21 соединен с входом третьего привода 20 диафрагмы, выход третьего привода 20 диафрагмы соединен с управляющим входом третьей диафрагмы 17, окуляр 14 расположен на пути отраженного от третьего светоделителя 13 луча. Изображенная около первого фильтра 4 стрелка показывает, что вектор градиента прозрачности первого фильтра 4 лежит в плоскости чертежа. Изображенный около второго фильтра 5 кружок с точкой в центре показывает, что вектор градиента прозрачности второго фильтра 5 перпендикулярен плоскости чертежа.
Заявленный оптический измеритель угловых координат работает следующим образом. Оптическое излучение от удаленного объекта принимается фокусирующей приемной оптической системой 1, последовательно проходит через первый светоделитель 2, второй светоделитель 3, третью диафрагму 17 и попадает на третий светоделитель 13. Отраженный от третьего светоделителя луч проходит через окуляр 14 и наблюдается оператором, который при наличии в поле зрения нескольких объектов выбирает требуемый объект и с помощью приводов 18, 19 и 20 регулирует положение отверстий диафрагм 15, 16 и 17 и размер отверстий в диафрагмах 15, 16 и 17 таким образом, чтобы через эти отверстия проходило оптическое излучение только от требуемого объекта. Данная операция может производиться в ручном, автоматическом или полуавтоматическом режимах, во втором случае анализ изображения, выбор требуемого объекта, а также выбор размеров отверстий в диафрагмах 15, 16 и 17 и их пространственное положение осуществляет компьютер. Возможно также осуществление полуавтоматического режима. В полуавтоматическом режиме часть указанных операций выполняет оператор, а остальные операции выполняет компьютер.
Прошедшее через фокусирующую приемную оптическую систему 1 оптическое излучение мощностью J разделяется первым светоделителем 2 на два пучка, при этом мощность прошедшего через первый светоделитель 2 оптического излучения равна K1J, где K1 - коэффициент пропускания по мощности первого светоделителя 2, а мощность отраженного от первого светоделителя 2 и падающего на первый фильтр 4 излучения равна (1-K1)J. На первый фильтр 4 попадает только излучение от исследуемого удаленного объекта, постороннее излучение не пропускает первая диафрагма 15. Пусть коэффициент K2 пропускания первого фильтра 4 можно записать в виде K2=K′1Y, где K′1 - постоянный коэффициент, то есть градиент пропускания первого фильтра 4 направлен вдоль оси Y, а зависимость пропускания первого фильтра 4 от координаты Y имеет линейный характер. Тогда мощность оптического сигнала на входе первого фотоприемника 6 равна (1-K1)K′1JY, а электрический сигнал U1ФП на выходе первого фотоприемника 6 равен α1(1-K1)K′1JY, где α1 - крутизна характеристики первого фотоприемника 6.
Отраженный от второго светоделителя 3 и падающий на второй фильтр 5 оптический пучок имеет мощность K1(1-K3)J, где K3 - коэффициент пропускания по мощности второго светоделителя 3. На второй фильтр 5 попадает только излучение от исследуемого удаленного объекта, постороннее излучение не пропускает вторая диафрагма 16. Пусть коэффициент K4 пропускания второго фильтра 5 можно записать в виде K4=K′2Х, где K′2 - постоянный коэффициент, то есть градиент пропускания второго фильтра 5 направлен вдоль оси X, а зависимость пропускания второго фильтра 5 от координаты Х имеет линейный характер. Тогда мощность оптического сигнала на входе второго фотоприемника 7 равна K1(1-K3)K′2JX, а электрический сигнал U2ФП на выходе второго фотоприемника 7 равен α2K1(1-K3)K′2JX, где α2 - крутизна характеристики второго фотоприемника 7. Мощность оптического сигнала на входе третьего фотоприемника 8 равна K1K3K5J, где K5 - коэффициент пропускания по мощности третьего светоделителя 13. На третий фотоприемник попадает только излучение от исследуемого удаленного объекта, постороннее излучение не пропускает третья диафрагма 17. Электрический сигнал U3ФП на выходе третьего фотоприемника 8 равен α3K1K3K5J, где α3 - крутизна характеристики третьего фотоприемника 8.
Сигнал с выхода первого фотоприемника 6 поступает на вход первого усилителя 9, коэффициент усиления ξ которого имеет вид:
ξ=α3K1K3K5/[α1(1-K1)K′1],
поэтому сигнал U1УС на выходе первого усилителя 9 имеет вид:
U1УС=U1ФПξ=α3K1K3K5YJ.
Сигнал с выхода второго фотоприемника 7 поступает на вход второго усилителя 10, коэффициент η усиления которого имеет вид:
η=α3K1K3K5/[(α2(1-K3)K′2],
поэтому сигнал U2УС на выходе второго усилителя 10 имеет вид:
U2УС=U2ФПη=α3K1K3K5XJ.
Сигнал с выхода первого усилителя 9 поступает на первый вход блока 11 определения координаты Y, а на второй вход блока 11 определения координаты Y поступает сигнал с выхода третьего фотоприемника 8. Сигнал UY на выходе блока 11 определения координаты Y будет равен отношению сигнала на первом его входе к сигналу на втором его входе:
UY=U1УС/U3ФП=α3K1K3K5YJ/[α3K1K3K5J]=Y, то есть электрический сигнал на выходе блока 11 определения координаты Y равен Y-координате положения сфокусированного пятна на фокальной плоскости фокусирующей приемной оптической системы 1.
Сигнал с выхода второго усилителя 10 поступает на первый вход блока 12 определения координаты X, на второй вход которого поступает сигнал с выхода третьего фотоприемника 8. Сигнал UХ на выходе блока 12 определения координаты Х равен отношению сигнала на первом его входе к сигналу на втором его входе:
UХ=U2УС/U3ФП=α3K1K3K5XJ/[α3K1K3K5J]=X, то есть электрический сигнал на выходе блока 12 определения координаты Х равен Х-координате положения сфокусированного пятна на фокальной плоскости фокусирующей приемной оптической системы 1.
Зная характеристики фокусирующей приемной оптической системы 1 и декартовы координаты Х и Y положения сфокусированного пятна на ее фокальной плоскости, можно определить направление прихода света от удаленного исследуемого объекта и тем самым его угловые координаты.
Реализация заявленного оптического пеленгатора не вызывает затруднений, так как все его блоки, узлы и элементы широко применяются в оптике и электронике. Так, фильтр 4 (фильтр 5) может быть выполнен из однородного поглощающего материала, толщина которого линейно изменяется вдоль оси Y (оси X) либо в виде плоско-параллельной пластины, концентрация поглощающих частиц в которой линейно изменяется вдоль оси Y (оси X). Линейность зависимости K2 от Y и K4 от Х не является обязательным требованием, эти зависимости могут иметь более сложный вид, тогда выражения для коэффициентов усиления K4 первого усилителя 9 и K6 второго усилителя 10 будут иметь более сложный вид, чем указано выше.
Источники информации
1. Зигель Ф.Ю. Астрономы наблюдают. М.: Наука, 1985. С.7-8 (рис.2).
2. Соловьев В.А., Яхонтов В.Е. Основы измерительной техники. Л.: Изд-во Ленингр. Ун-та, 1980. С.78-82.
3. Соловьев В.А., Яхонтов В.Е. Основы измерительной техники. Л.: Изд-во Ленингр. Ун-та, 1980. С.73-77.
4. Советский энциклопедический словарь. / Научно-редакционный совет; А.М.Прохоров (пред.). М.: Сов. энциклопедия, 1981. С.1201.
5. Патент Великобритании №1426745, МПК G01S 3/78.
6. Легомина И.Н., Тихонов Ю.Ф., Кириченко Д.В., Янов В.Г. Датчики волнового фронта. Учебное пособие. МО РФ, СПб: ВКА им. А.Ф.Можайского, 1993. С.19-23.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕЛЕНГАТОР ОПТИЧЕСКОГО ДИАПАЗОНА | 2008 |
|
RU2357271C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2008 |
|
RU2359288C1 |
| ОПТИЧЕСКИЙ ПЕЛЕНГАТОР | 2003 |
|
RU2231080C1 |
| Устройство для бесконтактного измерения профиля деталей | 1990 |
|
SU1796901A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2003 |
|
RU2276795C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2478220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249234C1 |
| Устройство для автоматического центрирования линз | 1988 |
|
SU1610266A1 |
| ОПТИЧЕСКОЕ НЕВЗАИМНОЕ УСТРОЙСТВО | 2007 |
|
RU2359300C1 |
Изобретение относится к оптической технике и предназначено для измерения угловых координат удаленных объектов. Задачей изобретения является повышение достоверности измерений. Сущность изобретения заключается в использовании дополнительного светоделителя, окуляра, расположенного на пути отраженного от дополнительного светоделителя луча, блока управления, трех приводов диафрагм, трех диафрагм, каждая из которых снабжена отверстием, размер которого и положение в плоскости перетяжки можно изменять для пропускания только оптического излучения от удаленного исследуемого объекта. 1 ил.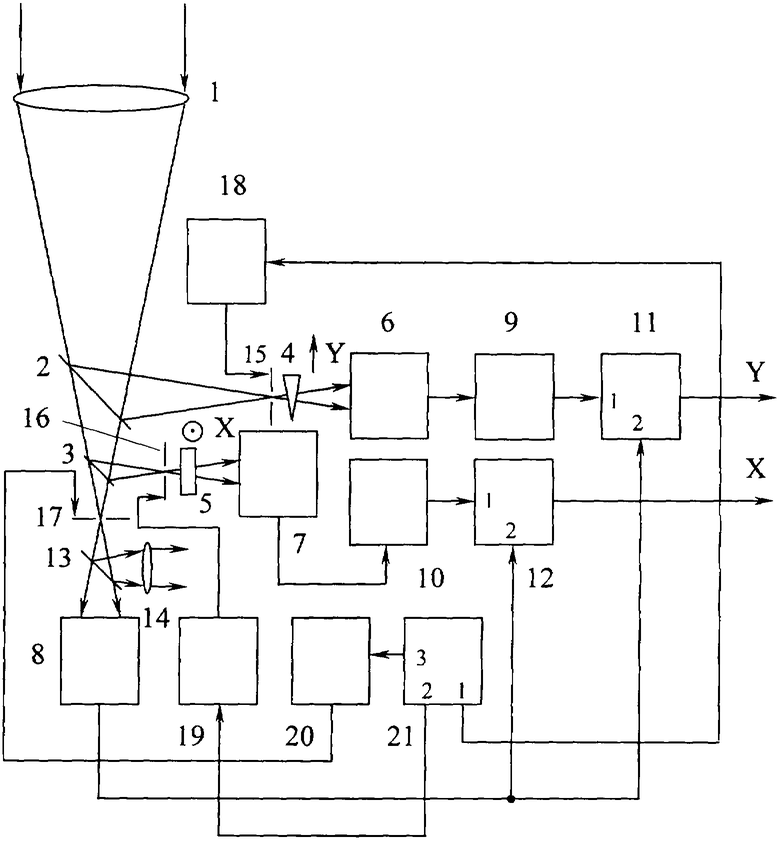
Оптический измеритель угловых координат, содержащий фокусирующую приемную оптическую систему, два светоделителя, два фильтра, три фотоприемника, два усилителя, блок определения координаты Y, блок определения координаты X, фокусирующая приемная оптическая система, первый светоделитель, второй светоделитель и третий фотоприемник последовательно расположены на оптической оси, первый фильтр расположен на пути отраженного от первого светоделителя луча, второй фильтр расположен на пути отраженного от второго светоделителя луча, первый фотоприемник расположен на пути прошедшего через первый фильтр луча, выход первого фотоприемника соединен с входом первого усилителя, выход первого усилителя соединен с первым входом блока определения координаты Y, второй фотоприемник расположен на пути прошедшего через второй фильтр луча, выход второго фотоприемника соединен с входом второго усилителя, выход второго усилителя соединен с первым входом блока определения координаты X, выход третьего фотоприемника соединен со вторым входом блока определения координаты Y и вторым входом блока определения координаты X, градиент прозрачности первого фильтра параллелен оси Y, градиент прозрачности второго фильтра параллелен оси X, отличающийся тем, что он дополнительно содержит третий светоделитель, окуляр, три диафрагмы, три привода диафрагмы, блок управления, первая диафрагма расположена в плоскости перетяжки луча между светоделителем и первым фильтром, вторая диафрагма расположена в плоскости перетяжки луча между вторым светоделителем и вторым фильтром, третья диафрагма расположена в плоскости перетяжки прошедшего через второй светоделитель луча, третий светоделитель расположен на пути прошедшего через третью диафрагму луча между третей диафрагмой и третьим фотоприемником, первый выход блока управления соединен с входом первого привода диафрагмы, выход первого привода диафрагмы соединен с управляющим входом первой диафрагмы, второй выход блока управления соединен с входом второго привода диафрагмы, выход второго привода диафрагмы соединен с управляющим входом второй диафрагмы, третий выход блока управления соединен с входом третьего привода диафрагмы, выход третьего привода диафрагмы соединен с управляющим входом третьей диафрагмы, окуляр расположен на пути отраженного от третьего светоделителя луча.
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЙ С ОБЪЕМНОЙ ГОЛОГРАММОЙ | 1999 |
|
RU2169348C1 |
| ОПТИКО-МЕХАНИЧЕСКИЙ ИЗМЕРИТЕЛЬ ДАВЛЕНИЯ | 1999 |
|
RU2159925C1 |
| ПРИВОД К СТАНКУ ДЛЯ РАСПИЛОВКИ КАМНЕЙ | 1935 |
|
SU45528A1 |

