1. Область техники, к которой относится изобретение
Настоящее изобретение относится к воздушному выключателю и, более конкретно, к устройству втягивания-выдвижения в воздушном выключателе для воздушного выключателя, которое способно стабильно выдерживать нагрузки от основного корпуса при выполнении операции втягивания и силы реакции, производимой, когда электрический контакт основного корпуса и электрический контакт рамы соединяются друг с другом.
2. Описание известного уровня техники
Воздушный выключатель относится к промышленному выключателю для переключения цепи с низким напряжением по сравнению с вакуумным выключателем для переключения цепи с высоким напряжением. Воздушный выключатель главным образом включает основной корпус и раму. Здесь основной корпус включает механизм переключения, контакторы, механизм гашения дуги и электрический контакт, электрически соединенный с рамой. Основной корпус может перемещаться в положение электрического соединения с рамой и в положение электрического отключения от рамы устройством втягивания-выдвижения для воздушного выключателя, которое будет описано ниже.
Рама используется как кожух, удерживающий основной корпус, и как средство для электрического соединения основного корпуса и внешнего источника энергии и нагрузки друг с другом. Для электрического соединения основного корпуса и внешнего источника энергии и нагрузки друг с другом рама снабжена внешним контактом, выступающим наружу для электрического соединения с внешним источником энергии и нагрузкой, и внутренним контактом, соединенным с электрическим контактом основного корпуса.
Один пример устройства втягивания-выдвижения для воздушного выключателя, соответствующего известному уровню техники, которое способно перемещать основной корпус в положение электрического соединения или отключения от рамы в воздушном выключателе, будет описан со ссылками на фиг. 1-3.
На фиг. 1 ссылочной позицией 10 обозначена рама, в частности одна из двух боковых пластин, установленных вертикально на обеих сторонах рамы.
Устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, показанное на фиг. 1, включает кулачок 30, шестерню 20 и выступающую часть B1.
Кулачок 30 установлен на раме 10 таким образом, что он удерживается и с возможностью вращения отцентрирован на оси P. Кулачок 30 снабжен кулачковым пазом 31, как приводной частью с пазом для вставки в него выступающей части B1 и передачи силы, которая позволяет выступающей части B1 двигаться горизонтально.
Шестерня 20 установлена на оси P соосно с кулачком 30.
Хотя это не показано на чертеже, устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, может также включать подвижную пластину МР, снабженную реечными передачами R на верхней ее части, как показано на фиг. 6. Шестерня 20 может вращаться подвижной пластиной МР, совершающей возвратно-поступательное движение, благодаря зацеплению с реечными передачами R подвижной пластины МР.
Выступающая часть B1 отступает непосредственно от боковой поверхности основного корпуса или отступает от пластинчатой рейки, удерживающей основной корпус и совершающей возвратно-поступательное движение вместе с основным корпусом таким образом, чтобы передавать движущую силу, которая позволяет основному корпусу перемещаться в соединенное положение, отсоединенное положение или контрольное положение.
На фиг. 1 ссылочные позиции 32, 40 и 50 прямо не связаны с устройством втягивания-выдвижения, соответствующим настоящему изобретению. Эти средства используются для автоматического соединения контакта источника энергии и сигнального контакта на раме 10 и контакта источника энергии и сигнального контакта на основном корпусе друг с другом в контрольном положении или соединенном положении и автоматического отсоединения их друг от друга в нерабочем положении.
Относительно не описанных ссылочных позиций, ссылочной позицией 32 обозначен выступ для передачи движущей силы, отступающий от одной стороны кулачка 30, и ссылочной позицией 40 обозначен рычаг, установленный на раме 10 таким образом, что он может поворачиваться в положение для приема вращательной движущей силы посредством соединения с выступом 32 для передачи движущей силы и в положение для отделения от вращательной движущей силы посредством отсоединения от выступа 32 для передачи движущей силы. Кроме того, ссылочной позицией 50 обозначена штанга, соединенная с рычагом 40 и направляемая направляющим элементом (ссылочная позиция не присвоена) таким образом, что она может перемещаться в вертикальном направлении. И ссылочной позицией 41 обозначена соединительная часть с вырезом, расположенная на рычаге 40 и соединенная с выступом 32 для передачи движущей силы.
Теперь с вышеупомянутой конфигурацией будет описано со ссылками на фиг. 1-3 действие устройства втягивания-выдвижения для воздушного выключателя, соответствующего известному уровню техники.
Сначала будет описано перемещение основного корпуса из нерабочего положения, показанного на фиг. 1, в контрольное положение, показанное на фиг. 2.
В состоянии, показанном на фиг. 1, когда рычаг управления (не показан) соединен с передней соединительной частью S1 для рычага управления шпинделя S, показанного на фиг. 6, и затем шпиндель S вращается в направлении по часовой стрелке (здесь предполагается, что подвижная пластина МР расположена слева от оси P на фиг. 1), подвижная пластина МР движется вправо на фиг. 1, и в этом случае находящиеся на ней реечные передачи R вращают шестерню 20 в направлении против часовой стрелки, показанном на фиг. 2. Соответственно, кулачок 30, установленный соосно с шестерней 20, также вращается в направлении против часовой стрелки в положение, показанное на фиг. 2. Здесь рычаг 40, соединенный с выступом 32 для передачи движущей силы кулачка 30, поворачивается в направлении по часовой стрелке, и, соответственно, штанга 50 перемещается вниз, таким образом, соединяя контакт источника энергии и сигнальный контакт (не показан) рамы и контакт источника энергии и сигнальный контакт основного корпуса друг с другом, таким образом, располагающиеся в контрольном положении. В этом контрольном положении, так как выступающая часть B1 находится на входе выреза 31 кулачка 30, не входя в контакт с кулачком 30, основной корпус не движется. Соответственно, электрический контакт (не показан) основного корпуса и соответствующий электрический контакт рамы 10 остаются отсоединенными друг от друга в том же состоянии, показанном на фиг. 1.
Далее будет описано перемещение основного корпуса из контрольного положения, показанного на фиг. 2, в соединенное положение, показанное на фиг. 3.
В состоянии, показанном на фиг. 2, когда рычаг управления (не показан) соединен с передней соединительной частью S1 для рычага управления шпинделя S, показанного на фиг. 6, и затем шпиндель S также вращается в направлении по часовой стрелке, подвижная пластина МР движется вправо на фиг. 2, и в этом случае расположенные на ней реечные передачи R вращают шестерню 20 в направлении против часовой стрелки, как показано на фиг. 3. Соответственно, кулачок 30, установленный соосно с шестерней 20, также вращается в направлении против часовой стрелки, как показано на фиг. 3. Здесь выступающая часть B1 перемещается в горизонтальном направлении влево на чертеже толкающей силой паза 31 кулачка 30. Соответственно, электрический контакт основного корпуса (не показан) и соответствующий электрический контакт рамы 10 механически и электрически соединяются друг с другом таким образом, чтобы получать воздушный выключатель в соединенном состоянии.
Далее будет описано перемещение основного корпуса из соединенного положения, показанного на фиг. 3, в нерабочее положение, показанное на фиг. 1.
В состоянии, показанном на фиг. 3, когда рычаг управления (не показан) соединен с передней соединительной частью S1 для рычага управления шпинделя S, показанного на фиг. 6, и затем когда шпиндель S вращается в направлении против часовой стрелки, подвижная пластина МР движется влево на фиг. 3, и в этом случае расположенные на ней реечные передачи R вращают шестерню 20 в направлении по часовой стрелке, как показано на фиг. 1. Соответственно, кулачок 30, установленный соосно с шестерней 20, также вращается в направлении по часовой стрелке, как показано на фиг. 1. Здесь выступающая часть B1 перемещается в горизонтальном направлении вправо на чертеже толкающей силой паза 31 кулачка 30. Соответственно, электрический контакт основного корпуса (не показан) и соответствующий электрический контакт рамы 10 механически и электрически отсоединяются друг от друга таким образом, чтобы получать воздушный выключатель в отключенном состоянии.
В таком устройстве втягивания-выдвижения для воздушного выключателя, соответствующем известному уровню техники, точка RP приложения силы реакции, произведенной, когда электрический контакт рамы 10 и электрический контакт основного корпуса соединяются друг с другом, находится в середине разности высот между положениями TP1, TP2 двух электрических контактов рамы 10, обозначенной пунктиром с двумя точками, как показано на фиг. 3. Однако в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем известному уровню техники, так как расстояние d1 между точкой RP приложения реакции силы реакции и осью P кулачка 30 велико, когда воздушный выключатель имеет большую коммутационную способность и размер, кулачку 30 становится труднее выдерживать силу реакции.
Кроме того, когда воздушный выключатель имеет большую коммутационную способность и размер, нагрузка основного корпуса также увеличивается. Относительно этого принципа, так как устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, снабжено осью P кулачка 30, расположенной в нем на нижней стороне, кулачку 30 может быть трудно выдерживать нагрузку основного корпуса и производить движущую силу, достаточную для перемещения основного корпуса.
Кроме того, так как устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, должно выдерживать нагрузку основного корпуса и силу реакции вращающим моментом малой шестерни, устройство втягивания-выдвижения, имеющее эту конструкцию, не может применяться в воздушном выключателе, имеющем большую коммутационную способность и размер.
Сущность изобретения
Таким образом, настоящее изобретение направлено на получение устройства втягивания-выдвижения для воздушного выключателя, которое способно эффективно выдерживать нагрузки основного корпуса и силы реакции, производимые при перемещении в соединенное положение, и применяемого в воздушном выключателе, имеющем большую коммутационную способность и размер.
Для достижения этих и других преимуществ и в соответствии с целью настоящего изобретения, воплощенной и общих чертах описанной здесь, получено устройство втягивания-выдвижения для воздушного выключателя в воздушном выключателе, содержащем раму, электрически соединенную с электрической нагрузкой и источником электрической энергии, и основной корпус, который может перемещаться в соединенное положение для электрического соединения с рамой, в контрольное положение, в котором основной корпус электрически отключен от рамы, но источник энергии управления подключен и осуществляется ввод-вывод сигналов, и в нерабочее положение, в котором основной корпус электрически отключен от рамы, источник энергии управления не подключен и ввод-вывод сигналов не осуществляется, причем устройство втягивания-выдвижения для воздушного выключателя содержит: шпиндель, снабженный резьбовой частью и вращаемый (поворачиваемый) вручную, будучи соединенным с рычагом управления; подвижную пластину, входящую в зацепление с резьбовой частью шпинделя при помощи резьбы таким образом, чтобы она могла совершать возвратно-поступательное движение по резьбовой части вращающегося шпинделя; реечную передачу, установленную на верхней поверхности подвижной пластины таким образом, чтобы она совершала возвратно-поступательное движение вместе с возвратно-поступательным движением подвижной пластины; шестерню, установленную так, что она входит в зацепление с реечной передачей и может вращаться в соответствии с возвратно-поступательным движением реечной передачи; кулачок, вращаемый вращательной движущей силой, передаваемой от шестерни, благодаря наличию зубчатой части, входящей в зацепление с шестерней и имеющей радиус, больший чем радиус шестерни, для усиления вращающего момента, переданного от шестерни, и снабженный кулачковым пазом, выдерживающим нагрузку основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом, когда основной корпус перемещается в соединенное положение; ось, расположенную на раме в положении, примыкающем посередине высоты между электрическими контактами рамы и, таким образом, с возможностью вращения удерживающую кулачок таким образом, чтобы кулачок эффективно выдерживал нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом; и приводную выступающую часть, отступающую от основного корпуса или средства для удерживания основного корпуса и перемещающуюся вместе с основным корпусом и соединенную с кулачком таким образом, чтобы передавать движущую силу от кулачка основному корпусу.
Указанные выше и другие цели, характеристики, объекты и преимущества настоящего изобретения станут более очевидными при ознакомлении с нижеследующим подробным описанием настоящего изобретения, данным в сочетании с прилагаемыми чертежами.
Краткое описание чертежей
Прилагаемые чертежи, которые даны для лучшего понимания изобретения и включены в это описание и составляют его часть, иллюстрируют предпочтительные варианты осуществления изобретения и совместно с описанием служат для пояснения принципов изобретения.
На чертежах:
фиг. 1 - вид сбоку, показывающий одну боковую пластину рамы без основного корпуса, который показывает конфигурацию устройства втягивания-выдвижения для воздушного выключателя, соответствующего известному уровню техники, и состояние устройства втягивания-выдвижения в нерабочем положении;
фиг. 2 - вид, показывающий устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, в контрольном положении;
фиг. 3 - вид, показывающий устройство втягивания-выдвижения для воздушного выключателя, соответствующее известному уровню техники, в соединенном положении;
фиг. 4 - вид сверху в перспективе, показывающий состояние, в котором основной корпус выдвинут из рамы, который показывает внешнюю конфигурацию воздушного выключателя, соответствующего настоящему изобретению;
фиг. 5 - увеличенный вид спереди, показывающий кулачок устройства втягивания-выдвижения для воздушного выключателя, соответствующего настоящему изобретению;
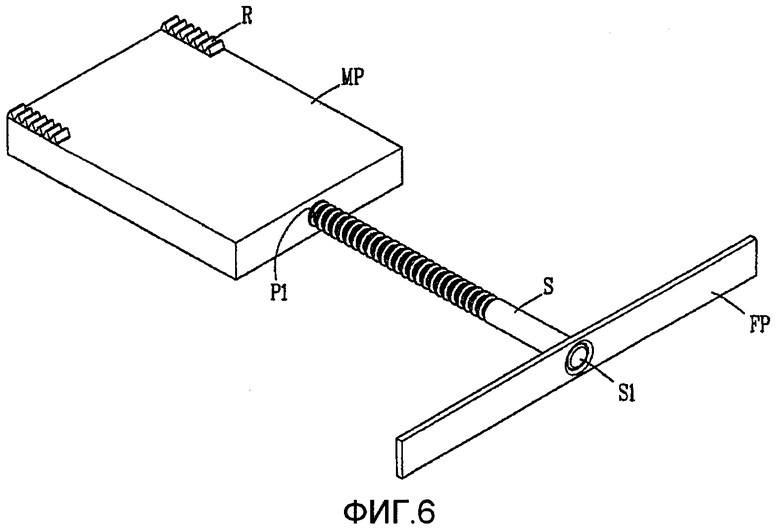
фиг. 6 - вид в перспективе, показывающий шпиндель, подвижную пластину и реечную передачу устройства втягивания-выдвижения для воздушного выключателя, соответствующего настоящему изобретению;
фиг. 7 - вид сбоку, показывающий одну боковую пластину рамы без основного корпуса, который показывает конфигурацию устройства втягивания-выдвижения для воздушного выключателя, соответствующего настоящему изобретению, и состояние устройства втягивания-выдвижения в нерабочем положении;
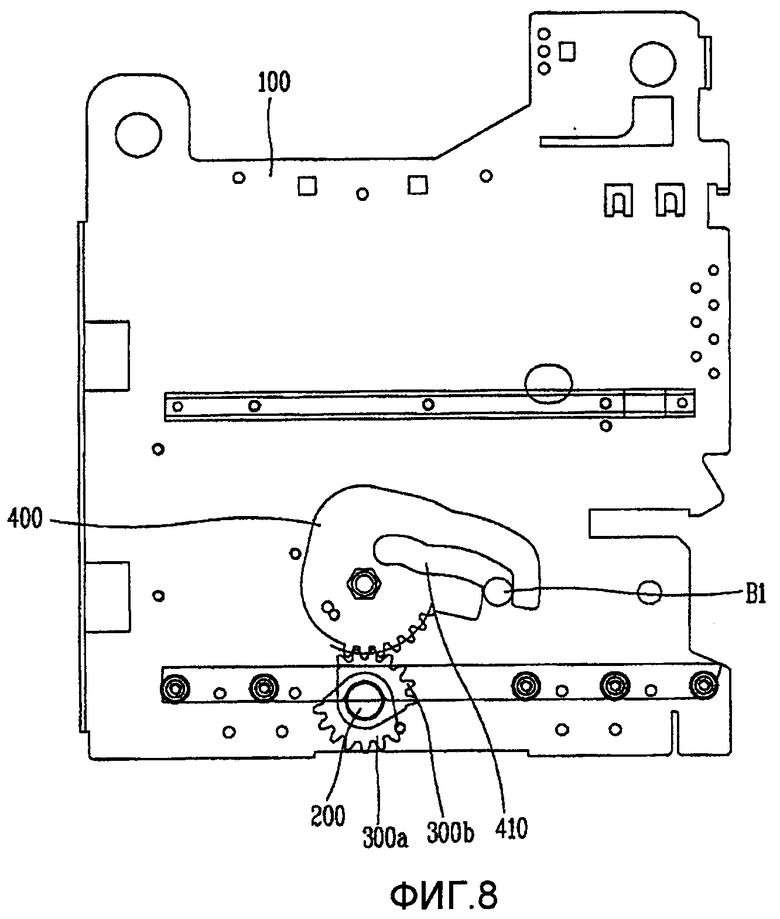
фиг. 8 - вид состояния, показывающий устройство втягивания-выдвижения для воздушного выключателя, соответствующее настоящему изобретению, в контрольном положении;
фиг. 9 - вид состояния, показывающий устройство втягивания-выдвижения для воздушного выключателя, соответствующее настоящему изобретению, в соединенном положении;
фиг. 10 - вид сверху, показывающий состояние, в котором электрический контакт основного корпуса и электрический контакт рамы соединены друг с другом в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем настоящему изобретению; и
фиг. 11 - вид сверху, показывающий состояние, в котором электрический контакт основного корпуса и электрический контакт рамы отсоединены друг от друга в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем настоящему изобретению.
Подробное описание изобретения
Теперь будет дано подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которого проиллюстрированы на прилагаемых чертежах.
Как показано на фиг. 4, воздушный выключатель, соответствующий настоящему изобретению, включает основной корпус 20 и раму 10. Ссылочной позицией S1 в передней нижней части основного корпуса 20 обозначена соединительная часть для рычага управления шпинделя S, который подробно показан на фиг. 6.
Как известно и описано выше, основной корпус 20 включает механизм переключения (не показан), контакторы, механизм гашения дуги, электрический контакт (см. ссылочную позицию T2 на фиг. 10 и 11) для электрического соединения с рамой 10. Основной корпус 20 может перемещаться в соединенное положение для электрического соединения с рамой 10, контрольное положение, в котором основной корпус 20 электрически отключен от рамы 10, но источник энергии управления (то есть источник электрической энергии для блока управления) соединен и может осуществляться ввод-вывод сигналов, и нерабочее положение, в котором основной корпус 20 электрически отключен от рамы 10, источник энергии управления не подключен и ввод-вывод сигналов не осуществляется.
Рама 10 служит кожухом, удерживающим основной корпус 20, и средством электрического соединения основного корпуса 20 и внешней электрической цепи (другими словами, внешнего источника электрический энергии и внешней электрической нагрузки) друг с другом. Таким образом, рама 10 включает внешний контакт (см. левую часть T1 на фиг. 10 и 11), отступающий наружу для электрического соединения с внешним источником энергии и нагрузкой, и внутренний контакт (см. правую часть T1 на фиг. 10 и 11) для соединения с электрическим контактом основного корпуса 20.
Теперь со ссылками на фиг. 5-7 будет описана конфигурация устройства втягивания-выдвижения для воздушного выключателя, соответствующего одному варианту осуществления настоящего изобретения.
Устройство втягивания-выдвижения для воздушного выключателя, соответствующее настоящему изобретению, включает шпиндель S, подвижную пластину МР и реечные передачи R, как показано на фиг. 6. Как показано на фиг. 6, шпиндель S может вручную вращаться посредством соединения рычага управления и снабжен резьбовой частью.
Подвижная пластина входит в зацепление с резьбовой частью шпинделя S резьбой и может совершать возвратно-поступательное движение по резьбовой части вращающегося шпинделя S. Ссылочной позицией P1 на фиг. 6 обозначено сквозное резьбовое отверстие, сформированное вдоль средней части подвижной пластины МР в направлении длины таким образом, что она входит в зацепление с резьбовой частью шпинделя S резьбой.
Реечные передачи R установлены на верхней поверхности подвижной пластины МР и могут совершать возвратно-поступательное движение вместе с подвижной пластиной МР, совершающей возвратно-поступательное движение. Реечные передачи могут быть полностью или частично сформированы на верхней поверхности подвижной пластины МР.
Устройство втягивания-выдвижения для воздушного выключателя, соответствующее настоящему изобретению, также включает шестерни 300a, 300b, кулачок 400, ось (см. ссылочную позицию С на фиг. 5) и приводную выступающую часть B1.
Шестерни 300a, 300b установлены так, что они входят в зацепление с реечными передачами R, и могут вращаться возвратно-поступательным движением реечных передач. Как показано на фиг. 7, шестерни 300a, 300b установлены на одном общем вращающемся валу 200 и включают первую шестерню 300a, входящую в зацепление с реечными передачами R, и вторую шестерню 300b, входящую в зацепление с зубчатыми частями (см. 400a на фиг. 5) кулачка 400.
Кулачок 400 входит в зацепление со второй шестерней 300b и снабжен зубчатой частью, имеющей радиус, больший чем радиус второй шестерни 300b, чтобы усиливать вращающий момент, передаваемый от второй шестерни 300b. Кулачок 400 может вращаться вращательной движущей силой, передаваемой от второй шестерни 300b. Кулачок 400 создает движущую силу, позволяющую перемещаться основному корпусу. И кулачок 400 снабжен кулачковым пазом 410, выдерживающим нагрузку основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом.
Как показано на фиг. 5, кулачковый паз 410 кулачка 400 включает множество кулачковых поверхностей 400b-1, 400b-3, 400b-5, причем каждая длина моментных рычагов l1, l2, l3 от оси С кулачка 400 постепенно уменьшается от открытой входной части кулачкового паза к закрытой внутренней конечной части 400b таким образом, чтобы производить вращающий момент для смещения нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом. Здесь каждая длина моментных рычагов l1, l2, l3 может быть указана как l1>l2>l3, поскольку l1 самый длинный, l2 - средний и l3 самый короткий из моментных рычагов l1, l2, l3. На фиг. 5 ссылочные позиции 400b-2, 400b-4 обозначают точки перегиба кривой. Кулачковый паз 410 кулачка 400 включают первую кулачковую поверхность 400b-1, расположенную в открытой входной части кулачкового паза 410 и имеющую самый длинный моментный рычаг l1 от оси С кулачка 400. Кроме того, кулачковый паз 410 кулачка 400 включает вторую кулачковую поверхность 400b-5, примыкающую к закрытой внутренней конечной части 400b кулачкового паза 410, и имеет самый короткий моментный рычаг l3 от оси С кулачка 400. Кроме того, кулачковый паз 410 кулачка 400 включает третью кулачковую поверхность 400b-3, соединяющую первую кулачковую поверхность 400b-1 и вторую кулачковую поверхность 400b-5 и имеющую моментный рычаг l3, который короче, чем моментный рычаг l1 первой кулачковой поверхности 400b-1, и длиннее, чем моментный рычаг l3 второй кулачковой поверхности 400b-5. Для уменьшения углового ускорения кулачковых поверхностей 400b-3, 400b-5, когда кулачок 400 вращается, угол между второй кулачковой поверхностью 400b-5 и третьей кулачковой поверхностью 400b-3 составляет по существу 0° или 180°. Таким образом, когда кулачок 400 вращается, когда приводная выступающая часть (см B1 на фиг. 7), отступающая от основного корпуса или средства для удерживания основного корпуса, перемещается вместе с основным корпусом, она сначала принимает толкающую силу от второй кулачковой поверхности 400b-5 и затем от третьей кулачковой поверхности 400b-3, или приводная выступающая часть B1 сначала принимает толкающую силу от третьей кулачковой поверхности 400b-3 и затем от второй кулачковой поверхности 400b-5, она почти не ускоряется. При приеме толкающей силы сначала от третьей кулачковой поверхности 400b-3 и затем от второй кулачковой поверхности 400b-5 приводная выступающая часть (см. B1 на фиг. 7) замедляется. Это происходит из-за того, что радиус кривизны третьей кулачковой поверхности 400b-3 больше, чем радиус кривизны второй кулачковой поверхности 400b-5. При этом угол между первой кулачковой поверхностью 400b-1 и третьей кулачковой поверхностью 400b-3 составляет приблизительно 120°. Таким образом, приводная выступающая часть (см. B1 на фиг. 7) ускоряется при приеме толкающей силы сначала от первой кулачковой поверхности 400b-1 и затем от третьей кулачковой поверхности 400b-3, или приводная выступающая часть B1 принимает толкающую силу сначала от третьей кулачковой поверхности 400b-3 и затем от первой кулачковой поверхности 400b-1.
Как показано на фиг. 5 и 7, чтобы позволить кулачку 400 эффективно выдерживать нагрузки от основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом, ось С расположена на раме в положении, примыкающем к середине высоты между электрическими контактами TP1, TP2 рамы, таким образом, с возможностью вращения удерживая кулачок. Более конкретно, как показано на фиг. 7, точка RP приложения силы реакции находится в середине высоты между электрическими контактами TP1, TP2 рамы и обозначена как воображаемая линия, то есть пунктирная линия с двумя точками. Точка RP приложения силы реакции также служит центральной точкой, в которой прилагается нагрузка основного корпуса. Ось С удалена от воображаемой линии на расстояние d2. Однако расстояние d1 оси P кулачка 30 известного уровня техники, удаленной от пунктирной линии с двумя точками, указывающей на точку RP приложения силы реакции в срединном положении между электрическими контактами TP1, TP2 рамы, показанной на фиг. 3, намного короче, чем расстояние d2 оси С в устройстве втягивания-выдвижения, соответствующем настоящему изобретению, удаленной от пунктирной линии с двумя точками, указывающей на точку RP приложения силы реакции. Это может быть представлено формулой d1>d2. Так как положение оси С кулачка 400 в устройстве втягивания-выдвижения, соответствующем настоящему изобретению, больше примыкает к точке RP приложения силы реакции и центральной точке нагрузки основного корпуса по сравнению с известным уровнем техники, она способна эффективно выдерживать нагрузки основного корпуса и произведенной силы реакции, когда электрический контакт основного корпуса и электрический контакт рамы соединяются друг с другом, и, соответственно, она способна эффективно допускать большую коммутационную способность и размер воздушного выключателя.
Приводная выступающая часть B1 отступает от основного корпуса или от средства, удерживающего основной корпус, и перемещается вместе с основным корпусом, например, с пластинчатым реечным элементом (не показан), прикрепленным к обеим боковым поверхностям основного корпуса. Приводная выступающая часть B1 соединена с кулачком 400, более конкретно, вставлена в кулачковый паз 410 кулачка 400, таким образом, для передачи движущей силы от вращающегося кулачка 400 основному корпусу для перемещения основного корпуса.
На фиг. 7, не описанной ссылочной позицией 100, обозначены обе боковые пластины, неподвижно установленные на обеих боковых поверхностях рамы 10.
Теперь со ссылками на фиг. 4, 10 и 11 будет описана конфигурация воздушного выключателя, соответствующего настоящему изобретению.
Воздушный выключатель, соответствующий настоящему изобретению, включает раму 10 и основной корпус 20, как показано на фиг. 4, в дополнение к конфигурации устройства втягивания-выдвижения, соответствующего настоящему изобретению. Конфигурация устройства втягивания-выдвижения, соответствующего настоящему изобретению, описана выше и, таким образом, его описание будет опущено.
Рама 10 может электрически соединяться с нагрузкой или источником энергии цепи. Рама 10 с возможностью движения удерживает основной корпус 20. Электрический контакт рамы 10 обозначен ссылочной позицией T1 на фиг. 10-11. Как показано на фиг. 10-11, электрический контакт конфигурирован так, что он включает правый и левый электрические контакты, и левый контакт электрически соединен с нагрузкой или источником энергии цепи.
Основной корпус 20 может перемещаться в соединенное положение для электрического соединения с рамой 10 и нерабочее положение для электрического отключения от рамы 10. Хотя это не показано на фиг. 4, основной корпус 20 снабжен частью, обозначенной ссылочной позицией T2, как электрическим контактом, показанным на фиг. 10 и 11, для электрического соединения с рамой 10 или отключения от нее.
Между тем, как показано на фиг. 9, в воздушном выключателе, соответствующем настоящему изобретению, боковая пластина 100 рамы снабжена верхней направляющей рейкой UG и нижней направляющей рейкой LR для направления горизонтального перемещения основного корпуса 20. И множество направляющих роликов LR1 с возможностью вращения установлены на нижней направляющей рейке LR.
Теперь со ссылками на фиг. 7-9 будет описано действие устройства втягивания-выдвижения для воздушного выключателя, соответствующего настоящему изобретению.
На фиг. 7 изображен вид сбоку, показывающий одну боковую пластину рамы без основного корпуса, который показывает конфигурацию устройства втягивания-выдвижения для воздушного выключателя и состояние устройства втягивания-выдвижения в нерабочем положении. На фиг. 8 изображен вид состояния, показывающий устройство втягивания-выдвижения для воздушного выключателя в контрольном положении в соответствии с настоящим изобретением. И на фиг. 9 изображен вид состояния, показывающий устройство втягивания-выдвижения для воздушного выключателя в соединенном положении в соответствии с настоящим изобретением.
Сначала будет описано перемещение основного корпуса из нерабочего положения, показанного на фиг. 7, в контрольное положение, показанное на фиг. 8.
Как показано на фиг. 4 и 6, в воздушном выключателе, соответствующем настоящему изобретению, когда рычаг управления (не показан) вставлен в отверстие S1 для присоединения рычага управления, расположенное в средней части передней панели управления (см. FP на фиг. 6) в направлении длины, и затем шпиндель S вращается в направлении по часовой стрелке, подвижная пластина МР, показанная на фиг. 6, перемещается к передней стороне воздушного выключателя, то есть к передней панели FP управления на фиг. 6 (вправо на фиг. 7) вдоль резьбовой части шпинделя S.
Соответственно, реечные передачи R, установленные на подвижной пластине МР, входят в зацепление с первой шестерней 300a таким образом, что они вращают первую шестерню 300a в направлении против часовой стрелки. Соответственно, ось 200 вращения вращается в направлении против часовой стрелки, и в этом случае вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении против часовой стрелки.
Соответственно, кулачок 400, имеющий зубчатую часть (см. 400a на фиг. 5), входящую в зацепление со второй шестерней 300b, вращается в направлении по часовой стрелке из состояния, показанного на фиг. 7, и затем располагается как показано на фиг. 8. Так как радиус зубчатой части кулачка 400 больше, чем радиус шестерен 300a, 300b, кулачок 400 производит вращающий момент, который больше, чем вращающий момент второй шестерни 300b. Выступающая часть B1, отступающая от основного корпуса или несущего элемента, подвижного вместе с основным корпусом, удерживая его, располагается на входе паза 410 кулачка 400. Таким образом, устройство втягивания-выдвижения и воздушный выключатель заканчивают действие из нерабочего положения в контрольное положение.
Здесь, благодаря механизму передачи движущей силы (не показан), соединенному так, чтобы он взаимодействовал с кулачком 400, соединители, соответственно, расположенные на раме 10 и основном корпусе 20 для источника энергии и сигнального ввода-вывода для блока управления (не показан) воздушного выключателя, соединяются таким образом, что они взаимодействуют с вращающимся кулачком 400. Здесь, даже при том, что электрическое соединение с внешней нагрузкой и источником энергии разъединено, источник энергии и сигнальный ввод-вывод могут быть осуществлены через соединители. Соответственно, можно контролировать, действительно ли воздушный выключатель нормально работает.
Далее со ссылками на основные фиг. 8 и 9 и вспомогательные фиг. 5, 6, 10 и 11 будет описано перемещение основного корпуса из контрольного положения в соединенное положение.
Когда рычаг управления (не показан) вставлен в соединительное отверстие S1 для рычага управления, расположенное в средней части передней панели управления (см. FP на фиг. 6) на фиг. 4, в направлении длины из состояния, показанного на фиг. 8, и шпиндель S затем вращается в направлении по часовой стрелке, подвижная пластина, показанная на фиг. 6, перемещается к передней стороне воздушного выключателя, то есть к передней панели FP управления на фиг. 6 (вправо на фиг. 8) по резьбовой части шпинделя S.
Первая шестерня 300a, входящая в зацепление с реечными передачами R, установленными на подвижной пластине МР, в контрольном положении, также вращается в направлении против часовой стрелки. Соответственно, ось 200 вращения также вращается в направлении против часовой стрелки, и вторая шестерня 30b, соосно соединенная с осью 200 вращения, также вращается в направлении против часовой стрелки.
Соответственно, кулачок 400, имеющий зубчатую часть, входящую в зацепление со второй шестерней 300b, вращается в направлении по часовой стрелке из состояния, показанного на фиг. 6. Здесь, так как радиус зубчатой части кулачка 400 больше, чем радиус шестерен 300a, 300b, кулачок 400 производит вращающий момент, усиленный больше, чем вращающий момент второй шестерни 300b. Таким образом, кулачок 400 может создавать движущую силу, позволяющую легко перемещать в горизонтальном направлении основной корпус, имеющий большую коммутационную способность и размер. И здесь на выступающую часть B1, расположенную во входе паза 410 кулачка 400 в контрольном положении, нажимает паз 410 вследствие вращения кулачка 400 в направлении по часовой стрелке, и она движется горизонтально по кулачковому профилю паза 410 таким образом, что она перемещается в заднюю сторону рамы, то есть в левую сторону на чертеже, как показано на фиг. 9. Как показано на фиг. 5, основной корпус, нажатый выступающей частью B1, плавно и быстро перемещается в горизонтальном направлении в соединенное положение, входя в контакт с первой кулачковой поверхностью 400b-1 и третьей кулачковой поверхностью 400b-3, проходящей от первой кулачковой поверхности 400b-1 под углом больше 90° и меньше 180°, например 120°, через точку 400b-2 перегиба, имеющую заданный радиус кривизны, при помощи кулачка 400, вращающегося в направлении по часовой стрелке. Таким образом, перемещение основного корпуса в соединенное положение, в котором электрический контакт T2 основного корпуса и электрический контакт T1 рамы электрически и механически соединены друг с другом, закончено, как показано на фиг. 10. И после того как сила реакции, произведенная, когда электрический контакт T1 рамы и электрический контакт T2 основного корпуса соединяются друг с другом, максимизируется, выступающая часть B1 входит в контакт со второй кулачковой поверхностью 400b-5, имеющей разность угла 0° или 180° относительно третьей кулачковой поверхности 400b-3, то есть входит в контакт с продолжающейся поверхностью почти без изменения угла и, соответственно, угловое ускорение и момент инерции в соответствии с вращением кулачка 400 уменьшены. В результате перемещения основного корпуса из контрольного положения в соединенное положение электрический контакт T2 основного корпуса электрически и механически соединяется с соответствующим электрическим контактом T1. И соединители рамы и основного корпуса остаются соединенными друг с другом механически и электрически. Соответственно, цепь между нагрузкой и источником энергии входит в электрически соединенное состояние, и может осуществляться питание источника энергии и сигнального ввода-вывода для блока управления воздушного выключателя.
Теперь будет описано перемещение основного корпуса из соединенного положения, показанного на фиг. 9, в контрольное положение, показанное на фиг. 8.
Как показано на фиг. 6, когда рычаг управления (не показан) вставлен в соединительное отверстие S1 для рычага управления воздушного выключателя, соответствующего настоящему изобретению, и шпиндель S вращается в направлении против часовой стрелки, подвижная пластина МР, показанная на фиг. 6, перемещается к задней стороне воздушного выключателя, то есть в направлении удаления от передней панели FP управления на фиг. 6 (влево на фиг. 9) по резьбовой части шпинделя S.
Реечные передачи R, установленные на подвижной пластине, движущейся назад, также перемещаются назад, и, соответственно, первая шестерня 300a, входящая в зацепление с реечными передачами R, вращается в направлении по часовой стрелке. Соответственно, ось 200 вращения вращается в направлении по часовой стрелке, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении по часовой стрелке.
Соответственно, кулачок 400, имеющий зубчатую часть, входящую в зацепление со второй шестерней 300b, вращается в направлении против часовой стрелки из состояния, показанного на фиг. 9, в состояние, показанное на фиг. 8. Здесь так как радиус зубчатой части кулачка 400 больше радиуса шестерен 300a, 300b, кулачок 400 производит вращающий момент, больший, чем вращающий момент второй шестерни 300b. Таким образом, кулачок 400 может создавать движущую силу, позволяющую основному корпусу, имеющему большую коммутационную способность и размер, легко перемещаться в горизонтальном направлении. И здесь выступающая часть B1, расположенная на второй кулачковой поверхности 400b-5 паза 410 кулачка 400 в соединенном положении, нажимается пазом 410 вследствие вращения кулачка 400 в направлении против часовой стрелки таким образом, что она перемещается к передней стороне рамы в горизонтальном направлении, то есть вправо на чертеже, по профилю кулачкового паза 410, как показано на фиг. 8. Соответственно, основной корпус также перемещается к передней стороне рамы на расстояние перемещения выступающей части B1 в горизонтальном направлении. Соответственно, электрический контакт T2 основного корпуса и электрический контакт T1 рамы механически и электрически отсоединяются друг от друга, как показано на фиг. 11.
В результате перемещения основного корпуса из соединенного положения в контрольное положение, соединители основного корпуса и рамы остаются соединенными друг с другом, и нагрузка и источник энергии цепи электрически отключены. Соответственно, источник энергии питает блок управления воздушного выключателя, и может осуществляться ввод-вывод для блока управления.
Теперь будет описано перемещение основного корпуса из контрольного положения, показанного на фиг. 8, в нерабочее положение, показанное на фиг. 7.
Когда рычаг управления (не показан) вставлен в соединительное отверстие S1 для рычага управления воздушного выключателя, соответствующего настоящему изобретению, и шпиндель S вращается в направлении против часовой стрелки, подвижная пластина МР, показанная на фиг. 6, перемещается к задней стороне воздушного выключателя, то есть в направлении большего удаления от передней панели FP управления на фиг. 6 (влево на фиг. 8) по резьбовой части шпинделя S.
Соответственно, реечные передачи R на подвижной пластине также перемещаются в направлении большего удаления от передней панели FP управления (влево на фиг. 8), и первая шестерня 300a, входящая в зацепление с реечными передачами R, также вращается от контрольного положения в направлении по часовой стрелке на чертеже. Соответственно, ось 200 вращения также вращается в направлении по часовой стрелке, и вторая шестерня 300b, соосно соединенная с осью 200 вращения, также вращается в направлении по часовой стрелке.
Соответственно, кулачок 400, имеющий зубчатую часть, входящую в зацепление со второй шестерней 300b, вращается в направлении против часовой стрелки от состояния, показанного на фиг. 8. Здесь выступающая часть B1 отделяется от паза 410 кулачка 400 таким образом, что она находится в состоянии, показанном на фиг. 7.
Каждый соединитель основного корпуса и рамы отключен друг от друга с перемещением основного корпуса из контрольного положения в нерабочее положение, и действие разъединения закончено.
Как указано выше, в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем настоящему изобретению, ось кулачка расположена смежно с точкой приложения силы реакции. Кроме того, в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем настоящему изобретению, радиус зубчатой части кулачка намного больше радиуса шестерен и, соответственно, он способен усиливать вращательную движущую силу. Кроме того, в устройстве втягивания-выдвижения для воздушного выключателя, соответствующем настоящему изобретению, кулачок передает движущую силу основному корпусу через кулачковый паз, имеющий множество кулачковых поверхностей от кулачковой поверхности, имеющей самый длинный моментный рычаг, до наименьшего моментного рычага от оси. Соответственно, устройство втягивания-выдвижения для воздушного выключателя способно эффективно выдерживать нагрузки от основного корпуса и силы реакции, произведенные при перемещении в соединенное положение, и применяться с воздушным выключателем, имеющим большую коммутационную способность и размер.
Указанные выше варианты конструкции и преимущества являются только иллюстративными и не должны рассматриваться, как ограничивающие настоящее описание. Настоящие идеи изобретения могут легко применяться с другими типами устройств. Это описание имеет только иллюстративный характер и не ограничивает объем формулы изобретения. Для специалистов в данной области техники будут очевидны многие альтернативы, модификации и варианты. Признаки, конструкции, способы и другие характеристики описанных здесь типичных вариантов конструкции могут быть скомбинированы различными путями для получения дополнительных и/или альтернативных вариантов осуществления изобретения.
Поскольку представленные признаки изобретения могут быть воплощены в нескольких формах, не отступая от его характеристик, также следует понимать, что описанные выше варианты осуществления изобретения не ограничены ни одной из деталей предшествующего описания, если не определено иначе, а скорее должны быть рассмотрены широко в пределах его объема, определенного прилагаемой формулой изобретения, и, таким образом, все изменения и модификации, которые входят в пределы и границы формулы изобретения или эквиваленты таким пределам и границам, таким образом, охвачены прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОДКЛЮЧЕНИЯ УПРАВЛЯЮЩЕГО ТЕРМИНАЛА ДЛЯ ВЫДВИЖНОГО ВОЗДУШНОГО ВЫКЛЮЧАТЕЛЯ И СОДЕРЖАЩИЙ ЕГО ВОЗДУШНЫЙ ВЫКЛЮЧАТЕЛЬ | 2008 |
|
RU2380783C1 |
| СТИРАЛЬНАЯ МАШИНА | 2010 |
|
RU2448208C1 |
| АВТОМАТИЧЕСКОЕ РАЗГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ЗАМЫКАЮЩЕЙ ПРУЖИНЫ В ВОЗДУШНОМ ПЕРЕКЛЮЧАТЕЛЕ И ВОЗДУШНЫЙ ПЕРЕКЛЮЧАТЕЛЬ С ТАКИМ УСТРОЙСТВОМ | 2008 |
|
RU2370844C1 |
| ОДНОШПИНДЕЛЬНЫЙ АВТОМАТИЧЕСКИЙ ТОКАРНО-РЕВОЛЬВЕРНЫЙ СТАНОК | 1949 |
|
SU91305A1 |
| ОБЩАЯ ИСПОЛНИТЕЛЬНАЯ СИСТЕМА С МНОЖЕСТВОМ ПЕРЕКЛЮЧАТЕЛЕЙ ДЛЯ РАСПРЕДЕЛИТЕЛЬНОГО УСТРОЙСТВА | 2013 |
|
RU2537842C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| Товарный регулятор ткацкого станка | 1987 |
|
SU1647052A1 |
| Кантователь | 1981 |
|
SU1007885A1 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ ВОЗДУШНОГО ВЫКЛЮЧАТЕЛЯ | 2007 |
|
RU2342728C1 |
| ШАРНИРНАЯ КОНСТРУКЦИЯ И ЭЛЕКТРОННОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ШАРНИРНУЮ КОНСТРУКЦИЮ | 2020 |
|
RU2779841C2 |









Устройство втягивания-выдвижения для воздушного выключателя большой коммутационной способности и размера содержит: подвижную пластину, входящую в зацепление с резьбовой частью шпинделя с возможностью совершать возвратно-поступательное движение; реечную передачу, установленную на верхней поверхности подвижной пластины с возможностью совершать возвратно-поступательное движение вместе с возвратно-поступательным движением подвижной пластины; шестерню, входящую в зацепление с реечной передачей; кулачок, вращаемый движущей силой, передаваемой от шестерни, благодаря наличию зубчатой части, входящей в зацепление с шестерней и имеющей радиус, больший чем радиус шестерни; ось, расположенную на раме в положении, примыкающем к середине высоты между электрическими контактами рамы, таким образом, чтобы кулачок эффективно выдерживал нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом; и приводную выступающую часть, отступающую от основного корпуса и перемещающуюся вместе с основным корпусом и соединенную с кулачком таким образом, чтобы передавать движущую силу от кулачка основному корпусу. Технический результат - способность устройства стабильно выдерживать нагрузки от основного корпуса при выполнении операции втягивания и силы реакции, производимой, когда электрический контакт основного корпуса и электрический контакт рамы соединяются друг с другом. 2 н. и 8 з.п. ф-лы, 11 ил.
1. Устройство втягивания-выдвижения для воздушного выключателя в воздушном выключателе, содержащем раму, электрически соединенную с электрической нагрузкой и источником электрической энергии, и основной корпус, который может перемещаться в соединенное положение для электрического соединения с рамой, в контрольное положение, в котором основной корпус электрически отключен от рамы, но источник энергии управления подключен, и осуществляется ввод-вывод сигналов, и в нерабочее положение, в котором основной корпус электрически отключен от рамы, источник энергии управления не подключен, и ввод-вывод сигналов не осуществляется, причем устройство втягивания-выдвижения для воздушного выключателя содержит
шпиндель, снабженный резьбовой частью и вращаемый вручную, будучи соединенным с рычагом управления;
подвижную пластину, входящую в зацепление с резьбовой частью шпинделя при помощи резьбы таким образом, чтобы она могла совершать возвратно-поступательное движение по резьбовой части вращающегося шпинделя;
реечную передачу, установленную на верхней поверхности подвижной пластины таким образом, чтобы она совершала возвратно-поступательное движение вместе с возвратно-поступательным движением подвижной пластины;
шестерню, установленную так, что она входит в зацепление с реечной передачей и может вращаться в соответствии с возвратно-поступательным движением реечной передачи;
кулачок, вращаемый вращательной движущей силой, передаваемой от шестерен, благодаря наличию зубчатой части, входящей в зацепление с шестерней и имеющей радиус, больший чем радиус шестерни, для усиления вращающего момента, переданного от шестерни, и снабженный кулачковым пазом, выдерживающим нагрузку основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом, когда основной корпус перемещается в соединенное положение;
ось, расположенную на раме в положении, примыкающем по середине высоты между электрическими контактами рамы и, с возможностью вращения удерживающую кулачок таким образом, чтобы кулачок эффективно выдерживал нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом; и
приводную выступающую часть, отступающую от основного корпуса или средства для удерживания основного корпуса и перемещающуюся вместе с основным корпусом и соединенную с кулачком таким образом, чтобы передавать движущую силу от кулачка основному корпусу.
2. Устройство по п.1, в котором кулачковый паз кулачка содержит множество кулачковых поверхностей, в которых каждая длина моментных рычагов от оси кулачка постепенно уменьшается от открытой входной части кулачкового паза к закрытой внутренней конечной части таким образом, чтобы производить вращающий момент для смещения нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом.
3. Устройство по п.2, в котором кулачковый паз кулачка содержит
первую кулачковую поверхность, расположенную в открытой входной части кулачкового паза и имеющую самую большую длину моментного рычага от оси кулачка;
вторую кулачковую поверхность, примыкающую к закрытой внутренней конечной части кулачкового паза и имеющую самый короткий моментный рычаг от оси кулачка; и
третью кулачковую поверхность, соединенную между первой кулачковой поверхностью и второй кулачковой поверхностью и имеющую моментный рычаг, который короче, чем моментный рычаг первой кулачковой поверхности и длиннее, чем моментный рычаг второй кулачковой поверхности.
4. Устройство по п.3, в котором угол между второй кулачковой поверхностью и третьей кулачковой поверхностью равен по существу 0° или 180° для уменьшения углового ускорения.
5. Устройство по п.1, в котором шестерня содержит первую шестерню, причем первая шестерня входит в зацепление с реечными передачами, и вторую шестерню, входящую в зацепление с зубчатыми частями кулачка.
6. Воздушный выключатель, содержащий
раму, электрически соединенную с нагрузкой и с энергией цепи;
основной корпус, который может перемещаться в соединенное положение для электрического соединения с рамой и в нерабочее положение для электрического отключения от рамы;
шпиндель, снабженный резьбовой частью и вручную вращаемый (поворачиваемый), будучи соединенным с рычагом управления;
подвижную пластину, входящую в зацепление с резьбовой частью шпинделя резьбой, таким образом, для совершения возвратно-поступательного движения по резьбовой части вращающегося шпинделя;
реечную передачу, установленную на верхней поверхности подвижной пластины, для совершения возвратно-поступательного движения вместе с возвратно-поступательным движением пластины;
шестерню, установленную так, что она входит в зацепление с реечной передачей и вращается согласно возвратно-поступательному движению реечной передачи;
кулачок, вращающийся вращательной движущей силой, передаваемой от шестерни, будучи снабженным зубчатой частью, входящей в зацепление с шестерней и имеющей радиус, больший чем радиус шестерни, для увеличения вращающего момента, передаваемого от шестерни и снабженный кулачковым пазом для выдерживания нагрузки основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом, когда основной корпус перемещается в соединенное положение;
ось, расположенную на раме в положении, примыкающем к середине высоты между электрическими контактами рамы, и, таким образом, с возможностью вращения удерживающую кулачок таким образом, чтобы кулачок эффективно выдерживал нагрузку основного корпуса и произведенной силы реакции, когда основной корпус и рама электрически соединяются друг с другом; и
приводную выступающую часть, отступающую от основного корпуса или средства для удерживания основного корпуса и движущуюся вместе с основным корпусом и соединенную с кулачком таким образом, чтобы передавать движущую силу от кулачка основному корпусу.
7. Воздушный выключатель по п.6, в котором кулачковый паз кулачка содержит множество кулачковых поверхностей, в которых каждая длина моментных рычагов от оси кулачка постепенно уменьшается от открытой входной части кулачкового паза к закрытой внутренней конечной части таким образом, чтобы производить вращающий момент для смещения нагрузки основного корпуса и производимой силы реакции, когда основной корпус и рама электрически соединяются друг с другом.
8. Воздушный выключатель по п.7, в котором кулачковый паз кулачка содержит
первую кулачковую поверхность, расположенную в открытой входной части кулачкового паза и имеющую самый большой моментный рычаг от оси кулачка;
вторую кулачковую поверхность, примыкающую к закрытой внутренней конечной части кулачкового паза и имеющую самый короткий моментный рычаг от оси кулачка; и
третью кулачковую поверхность, соединенную между первой кулачковой поверхностью и второй кулачковой поверхностью и имеющую моментный рычаг, который короче, чем моментный рычаг первой кулачковой поверхности и длиннее, чем моментный рычаг второй кулачковой поверхности.
9. Воздушный выключатель по п.8, в котором угол между второй кулачковой поверхностью и третьей кулачковой поверхностью равен по существу 0° или 180° для уменьшения углового ускорения.
10. Воздушный выключатель по п.6, в котором шестерня содержит первую шестерню, входящую в зацепление с реечной передачей, и вторую шестерню, входящую в зацепление с зубчатой частью кулачка.
| US 2004112722 A1, 17.06.2004 | |||
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1971 |
|
SU420034A1 |
| US 4139748 A, 13.02.1979. | |||

