Изобретение относится к сельскохозяйственному машиностроению, а именно к механизмам привода режущего аппарата косилок и жаток.
В современных уборочных машинах широкое распространение имеют режущие аппараты с возвратно-поступательным движением ножевой полосы. Их простота и высокие технологические свойства не всегда могут быть реализованы из-за присущих подобным режущим аппаратам высоких инерционных нагрузок.
Для снижения динамической нагруженности деталей от инерционных сил возвратно-поступательно движущихся масс находит применение двухножевой беспальцевый режущий аппарат, привод подвижных ножевых полос которого осуществляется от кривошипно-шатунного механизма через промежуточные рычаги [1].
Недостатком технического решения является сложность конструкции, невозможность эффективного использования ее в широком диапазоне ширины захвата и частоты работы ножевых полос.
Из известных конструкций приводов режущих аппаратов наиболее близким по конструкции является привод режущего аппарата, включающий корпус, установленные на нем тяги, каждая из которых связана с ножевой полосой и одним концом упругого элемента в виде пружины растяжения-сжатия, расположенного на оси тяги и закрепленного на корпусе [2].
Недостатком технического решения является сложность конструкции, наличие трудоемких деталей: тяг, передающих усилие от кривошипно-шатунного механизма и большого числа упругих элементов, обеспечение долговечности которых весьма актуально.
Цель изобретения - упрощение конструкции, повышение надежности и эффективности работы привода режущего аппарата.
Поставленная цель достигается тем, что тяги выполнены в виде роторов цилиндрического линейного асинхронного электродвигателя, статор которого установлен жестко на корпусе и состоит из равных частей, выполненных так, что обмотки одной являются продолжением другой, и соединенных так, что электромагнитные силы, прикладываемые к роторам, направлены в противоположные стороны.
Авторам известно применение в приводе линейных асинхронных электродвигателей совестно с упругими элементами, разделение статора единого двигателя на части и снабжение каждого из них своим ротором. Однако только в предлагаемом техническом решении электромагнитные силы единого двигателя направлены в противоположные стороны и приложены к единому рабочему органу, что позволяет достичь новый технический эффект: равномерное распределение динамической нагруженности деталей от инерционных сил и регулирование параметров возвратно-поступательно движущихся масс, что удовлетворяет критерию «существенное отличие» и позволяет достичь цели изобретения: повысить надежность и эффективность работы технического решения.
Изменение частоты резонансных колебаний ножевых полос достигается изменением частоты подключения статора линейного асинхронного двигателя к сети и изменением жесткости упругих элементов. При одной и той же частоте возможно изменение амплитуды колебаний ножевых полос, а значит и ширины захвата, изменением длительности подключения статора к сети.
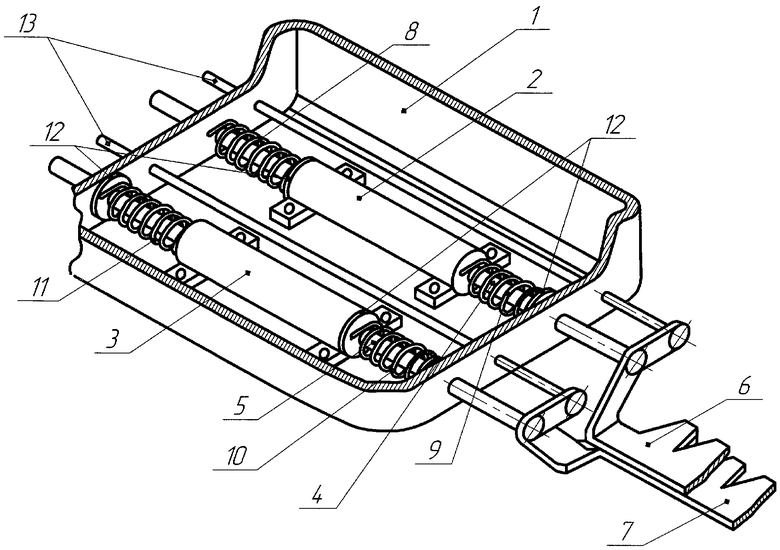
На чертеже изображена принципиальная схема технического решения.
Привод режущего аппарата включает в себя блок управления (не показан), корпус 1 с закрепленным внутри него цилиндрическим линейным асинхронным электродвигателем (ЛАД), статор которого состоит из двух частей 2 и 3, обхватывающих два ротора - цилиндрические тяги 4 и 5, одни концы которых соединены с ножевыми полосами 6 и 7, а другие свободно выходят из корпуса. На тягах 4 и 5 с двух сторон от статора электродвигателя расположены упругие элементы 8, 9 и 10, 11, опирающиеся с одной стороны на шайбы 12. Шайбы 12 могут перемещаться по резьбе, выполненной на тягах 4 и 5. В выбранном положении они закрепляются на тягах, например, с помощью гаек и гроверных шайб (не показаны). У упругих элементов 9 и 11 шайбы 12 расположены со стороны корпуса 7, а у упругих элементов 8 и 10 - со стороны статора ЛАД. Части статора ЛАД 2 и 3 жестко крепятся к корпусу болтовым соединением. К ножевым полосам, параллельно тягам 4 и 5, крепятся направляющие тяги 13, исключающие «разворачивание» ножевых полос.
Привод режущего аппарата работает следующим образом. При подключении блоком управления к статору ЛАД трехфазной системы питания электрический ток в статоре создает бегущее магнитное поле. Статор ЛАД выполнен из двух частей 2 и 3, конец первой из которых электрически связан с концом второй, так что направление бегущего поля в частях должно быть противоположно-направленным. Противоположно-направленные магнитные поля в частях статора, взаимодействуя с токами, индуцируемыми в замкнутых контурах роторов-тяг 4 и 5, вызывают появление электромагнитных сил и перемещение роторов-тяг, а следовательно, и ножевых полос в горизонтальном направлении относительно статора ЛАД и корпуса в направлении электромагнитных сил - полоса 6 движется к корпусу, а полоса 7 - от корпуса.
По мере движения роторов-тяг 4 и 5 шайбы 12 производят деформацию упругих элементов 8, 9 и 10, 11 - упругие элементы сжимаются. До момента полного сжатия упругих элементов происходит отключение блоком управления статора ЛАД от сети. Под действием потенциальной энергии, накопленной в упругих элементах, роторы-тяги 4 и 5 начинают движение в обратном направлении и в противоположные стороны. По мере движения роторов-тяг упругие элементы возвращаются в свое исходное состояние, затем происходит повторное подключение статора к сети. Процесс повторяется. Изменением частоты и длительности подключения блоком управления статора ЛАД к сети устанавливается необходимая технологическая частота и амплитуда колебаний роторов-тяг.
Настройка колебаний механической части привода в резонанс осуществляется за счет изменения жесткости упругих элементов 8, 9 и 10, 11. Изменение их жесткости осуществляется перемещением влево или вправо по резьбе на тягах 4 и 5 шайб 12 с последующим их закреплением гайками с гроверными шайбами.
Роторы-тяги 4 и 5 и направляющие 13 для уменьшения сил трения перемещаются внутри втулок, выполненных из материала с низким коэффициентом трения. Втулки жестко закреплены в корпусе (не показаны).
Благодаря применению линейного асинхронного электропривода, в предложенном техническом решении, реализуются вопросы, связанные с защитой от заклинивания и повреждения ножевых полос в случае попадания твердых предметов, так как имеется при этом возможность контролировать процесс резания по силе тока в статоре ЛАД.
Система питания привода формируется трехфазным синхронным генератором, ротор которого вращается от вала отбора мощности самоходной сельскохозяйственной машины. Передача энергии режущему аппарату осуществляется электрически, а не механически в отличие от прототипа, что тоже способствует повышению надежности технического решения и тем самым - достижению цели изобретения.
Дополнительно к этому следует отметить, что выполнение частей статора с числом пар полюсов меньше четырех приводит к усилению краевых эффектов в ЛАД [3]. Краевые эффекты проявляются в виде наложения на основную электромагнитную силу, создаваемую двигателем и приводящую в движение ножевые полосы, дополнительной переменной высокочастотной силы с частотой, двукратной частоте переменного тока источника, что способствует повышению эффективности процесса резания ножевыми полосами: уменьшается усилие резания и износ режущих кромок ножевых полос.
Источники информации
1. А.c. №1584803, М. кл.2 A01D 34/02, 1990, БИ №30.
2. Патент РФ №2090043, 6A01D 34/02, Привод режущего аппарата. Бойко Л.И., Богдашич Е.Е., Зимбицкий В.А. и другие. Опубликован 20.09.97, БИ №26.
3. Веселовский О.Н., Коняев А.Ю., Сарапулов Ф.И. Линейные асинхронные двигатели. - М.: Энергоатомиздат, 1991 г. - 256 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСЕВАЮЩИЙ АППАРАТ | 2009 |
|
RU2417570C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР | 2004 |
|
RU2256514C1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| НАСОСНАЯ УСТАНОВКА | 2015 |
|
RU2578746C1 |
| НАСОСНАЯ УСТАНОВКА | 2008 |
|
RU2370671C1 |
| ВИБРАЦИОННЫЙ СЕПАРАТОР | 2015 |
|
RU2581431C1 |
| Вибрационная центрифуга | 2018 |
|
RU2678008C1 |
| Виброцентробежный сепаратор | 2020 |
|
RU2728113C1 |
| СЕПАРАТОР | 2006 |
|
RU2325235C1 |
| Виброцентробежный сепаратор | 2018 |
|
RU2686760C1 |
Изобретение относится к сельскохозяйственному машиностроению. Привод режущего аппарата включает корпус с установленными в нем тягами и упругие элементы. Каждая тяга соединена с ножевой полосой и выполнена в виде ротора цилиндрического линейного асинхронного электродвигателя. Статор электродвигателя жестко установлен на корпусе и состоит из равных частей, выполненных так, что обмотки одной части являются продолжением обмоток другой части. Обмотки частей статора соединены так, что прикладываемые к роторам электромагнитные силы направлены в противоположные стороны. В предлагаемом приводе электрическая энергия тратится только на движение ножевых полос в одну сторону. Обратный ход полос происходит за счет энергии, накопленной в упругих элементах. За счет передачи энергии режущему аппарату электрически повышается надежности его работы. 1 ил.
Привод режущего аппарата, включающий корпус, установленные в нем тяги, каждая из которых связана с ножевой полосой, и упругие элементы, отличающийся тем, что тяги выполнены в виде роторов цилиндрического линейного асинхронного электродвигателя, статор которого установлен жестко на корпусе, состоит из равных частей, выполненных так, что обмотки одной являются продолжением другой, и соединенных так, что электромагнитные силы, прикладываемые к роторам, направлены в противоположные стороны.
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 1991 |
|
RU2090043C1 |
| МЕХАНИЗМ ПРИВОДА РЕЖУЩЕГО АППАРАТА | 2001 |
|
RU2197076C1 |
| Механизм привода режущего аппарата | 1987 |
|
SU1517822A1 |
| Привод режущего аппарата | 1982 |
|
SU1061746A1 |
| US 4735036 A, 05.04.1988. | |||

