Изобретение относится к подъемно-транспортному оборудованию, а именно к вибрационным конвейерам для транспортирования насыпных грузов, и может быть использовано в различных отраслях промышленности.
Известен вибрационный конвейер, включающий грузонесущий орган, выполненный в виде расположенного по дуге окружности желоба, установленного на неподвижном основании на упругих элементах и вибровозбудитель [1].
Однако такое устройство имеет низкую надежность из-за действия центробежных сил, приложенных при работе к кольцевому желобу и грузу на нем.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является вибрационный конвейер, включающий вибровозбудитель, упругие элементы и расположенный по дуге окружности желоб, установленный посредством подпружиненных направляющих на конусных роликах, расположенных на неподвижном основании, при этом на направляющих для каждого ролика выполнены по дугам окружностей конические пазы [2].
Недостатком известного вибрационного конвейера является низкая надежность в работе, сложность конструкции привода, отсутствие возможности регулирования производительности и изменения направления транспортирования.
Низкая надежность обусловлена тем, что при движении желоба по дуге окружности на желоб и на груз на нем действуют центробежные силы, которые приводят к интенсивному износу роликов и направляющих, с другой стороны к залипанию груза на стенке кольцевого желоба с противоположной от центра окружности стороне. Дополнительно к сказанному выполнение вибровозбудителя в виде электродвигателя вращательного движения с механическим преобразователем вращательного движения в возвратно-поступательное движение кольцевого желоба усложняет конструкцию привода и дополнительно снижает надежность конвейера из-за интенсивного износа трущихся деталей и узлов преобразователя. Кроме того, исключается возможность регулирования производительности и изменения направления транспортирования.
Цель изобретения - повышение надежности конвейера, упрощение его привода и расширение возможностей применения.
Указанная цель достигается тем, что в вибрационном контейнере, включающем вибровозбудитель, упругие элементы и расположенный по дуге окружности желоб, установленный посредством подпружиненных направляющих на конусных роликах, расположенных на неподвижном основании, при этом на направляющих для каждого ролика выполнены по дугам окружностей конические пазы, вибровозбудитель выполнен в виде снабженного блоком управления линейного асинхронного двигателя двухстороннего действия, расположенного по центру дуги окружности желоба, при этом ротор двигателя жестко соединен с желобом и установлен между статорами двигателя со стороны, обращенной к центру окружности, по дуге которой расположен желоб.
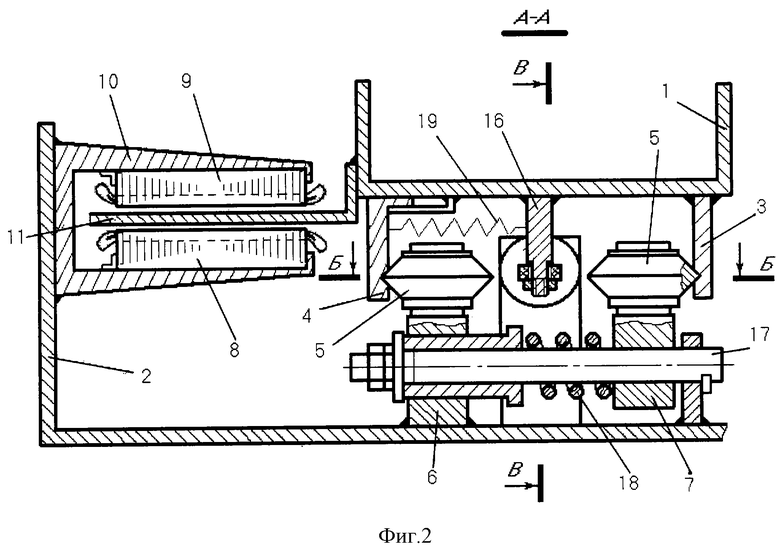
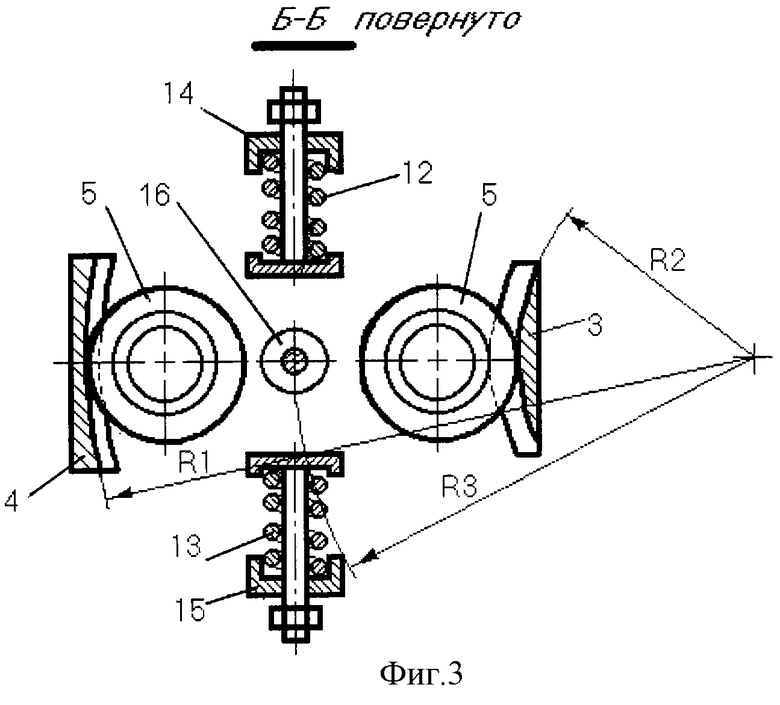
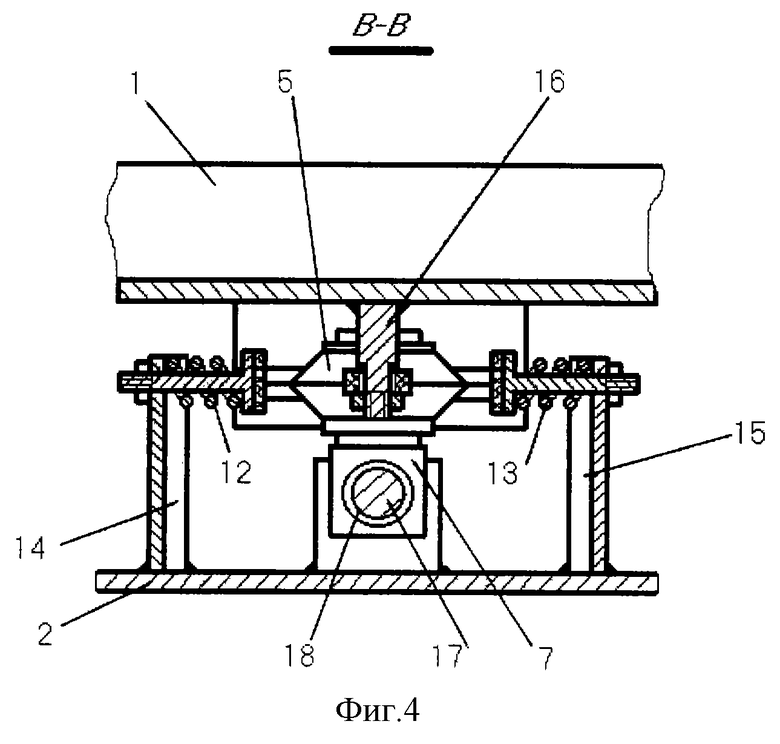
На фиг.1 изображен вибрационный конвейер, вид сверху; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг. 2.
Вибрационный конвейер содержит грузонесущий орган в виде расположенного по дуге окружности желоба 1, установленного на неподвижном основании 2 с помощью направляющих 3 и 4 и конусных роликов 5, смонтированных на стойках 6 и 7. На основании 2 со стороны, обращенной к центру дуги окружности желоба, неподвижно установлены статоры 8 и 9 линейного асинхронного двигателя (ЛАД) 10 двухстороннего действия. Ротором двигателя является неферромагнитная металлическая полоса 11, жестко закрепленная на желобе 1 и расположенная между статорами 8 и 9 со стороны, обращенной к центру окружности желоба. Ход желоба 1 по дуге окружности ограничивается упругими элементами 12 и 13, жестко закрепленными посредством упоров 14 и 15 на основании 2 и выступом 16, установленным под желобом 1. Стойка 7 выполнена с возможностью перемещения по оси 17 и подпружинена упругим элементом 18. ЛАД подключен к сети трехфазного переменного тока через блок управления 20.
Вибрационный конвейер работает следующим образом. Блок управления 20 подключает ЛАД к сети трехфазного переменного тока. Вдоль оси статоров двигателя создается бегущее магнитное поле, направленное в сторону транспортирования, например против часовой стрелки (фиг.1). Взаимодействие бегущего магнитного поля статоров с ротором 11 приводит к появлению электромагнитной силы, приложенной к ротору. Ее можно разложить на два вектора: тангенциальная составляющая направлена в сторону движения магнитного поля и радиальная составляющая направлена к центру окружности желоба 1. Ротор 11 передает эти усилия желобу 1. Желоб 1 движется с помощью направляющих 3 и 4 и конусных роликов 5 по дуге окружности. При движении желоба 1 по дуге окружности появляется центробежная сила, приложенная к желобу и транспортируемому грузу на нем. Радиальная электромагнитная сила, направленная против направления центробежной силы, разгружает направляющие желоба и ролики от действия центробежной силы на величину электромагнитной силы. Блок управления 20 в момент касания упругих элементов 12 выступом 16 отключает ЛАД от сети трехфазного переменного тока. Электромагнитные силы, приложенные к ротору 11, исчезают. При этом под действием центробежной силы желоб 1 делает резкое перемещение по радиусу в направлении от центра дуги окружности и, продолжая инерционное движение по окружности через выступ 16, сжимает упругие элементы 12. Кинетическая энергия желоба 1 переходит в потенциальную энергию упругих элементов 12, и в какой то момент движение желоба 1 в направлении транспортирования прекращается. Затем под действием потенциальной энергии сжатых упругих элементов 12 начинается движение желоба в противоположную сторону. Транспортируемый груз перемещается относительно желоба 1 во время взаимодействия выступов 16 с упругими элементами 12. Через какое-то время, задаваемое блоком управления 20, ЛАД повторно подключается к сети переменного тока. Появляются электромагнитные силы, приложенные к ротору 10, и описанные выше процессы повторяются.
Упругие элементы 13, установленные с противоположной стороны к направлению транспортирования ограничивают амплитуду колебаний желоба. Транспортируемый груз в момент начала взаимодействия выступа 16 с упругими элементами 12 по инерции перемещается по желобу 1, так как ускорение движения желоба резко меняет знак. Импульс центробежной силы в момент отключения ЛАД, воздействующий на желоб 1, позволяет повысить эффективность транспортирования, так как способствует отбрасыванию груза от стенки желоба со стороны, противоположной центру окружности кольцевого желоба, вызывая его перемещение. Одновременно с этим колебания желоба 1 на упругих элементах 18 и 19 способствует уменьшению коэффициента трения груза по желобу и как следствие уменьшению его износа, повышается производительность транспортирования.
Вибрационный конвейер может быть снабжен рядом упругих элементов 12 и 13, упоров 15, 14 и выступов 16 с равным шагом по длине желоба 1. Это позволит уменьшить силы взаимодействия, приходящиеся на один упор, повышая тем самым надежность конвейера.
В отличие от прототипа предлагаемое устройство позволяет регулировать производительность транспортирования изменением частоты и длительности включения в работу блоком управления ЛАД. Направление транспортирования можно изменять, меняя порядок чередования фаз трехфазного переменного тока, подводимого к ЛАД. Необходимая величина радиальной электромагнитной силы, развиваемой ЛАД, устанавливается величиной погружения ротора 11 в пространство между статорами 8 и 9. Это дает возможность установки оптимального соотношения между радиальной электромагнитной и центробежной силой, приложенной к желобу конвейера, что также способствует повышению надежности.
Блок управления 20 может быть при необходимости снабжен датчиком положения конвейера и реализован на базе тиристорного пускателя [3], управляемого генератором импульсов с регулируемой длительностью и частотой включений.
Расчет и построение ЛАД может быть выполнено по [4].
Источники информации
1. А. с. 716924, В 65 G 27/07. М.М. Осинцев. Вибрационный конвейер. Заявл. 11.04.77. Опубл. БИ 7.
2. А.с. 1177234, В 65 G 27/07. М.М. Осинцев. Вибрационный конвейер. Заявл. 22.03.84. Опубл. БИ 33.
3. Вишневецкий Л. М. , Левин Л.Г., Рабинович В.Б. Автоматизированный электропривод строительных машин. - Л.: Стройиздат, 1977, 88 с.
4. Веселовский О. Н. и др. Линейные асинхронные двигатели. - М.: Энергоатомиздат, 1991, 256 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
| СЕПАРАТОР | 2006 |
|
RU2325235C1 |
| ВИБРАЦИОННЫЙ СЕПАРАТОР | 2016 |
|
RU2648755C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ВИБРАТОР | 2004 |
|
RU2256514C1 |
| ВИБРАЦИОННЫЙ СЕПАРАТОР | 2009 |
|
RU2393029C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2008 |
|
RU2364564C1 |
| Вибрационная центрифуга | 2018 |
|
RU2678008C1 |
| ЛЕСОПИЛЬНАЯ РАМА | 2000 |
|
RU2198089C2 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| БУНКЕРНЫЙ ПИТАТЕЛЬ ДЛЯ ВЫДАЧИ ПОРОШКООБРАЗНЫХ МАТЕРИАЛОВ | 2002 |
|
RU2215678C2 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к вибрационным конвейерам для транспортирования насыпных грузов. Вибрационный конвейер включает вибровозбудитель, упругие элементы и расположенный по дуге окружности желоб, установленный посредством подпружиненных направляющих на конусных роликах, расположенных на неподвижном основании. На направляющих для каждого ролика выполнены по дугам окружностей конические пазы. Вибровозбудитель выполнен в виде снабженного блоком управления линейного асинхронного двигателя двухстороннего действия, расположенного по центру дуги окружности желоба. Ротор двигателя жестко соединен с желобом и установлен между статорами двигателя со стороны, обращенной к центру окружности, по дуге которой расположен желоб. Повышается надежность работы конвейера. 4 ил.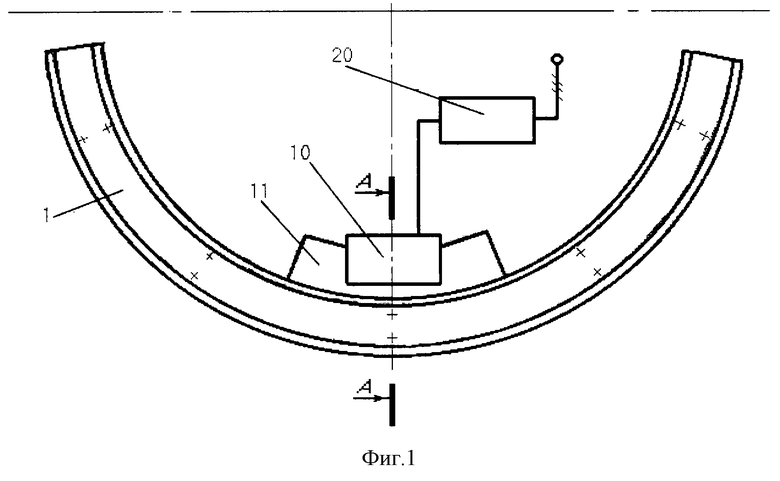
Вибрационный конвейер, включающий вибровозбудитель, упругие элементы и расположенный по дуге окружности желоб, установленный посредством подпружиненных направляющих на конусных роликах, расположенных на неподвижном основании, при этом на направляющих для каждого ролика выполнены по дугам окружностей конические пазы, отличающийся тем, что вибровозбудитель выполнен в виде снабженного блоком управления линейного асинхронного двигателя двухстороннего действия, расположенного по центру дуги окружности желоба, при этом ротор двигателя жестко соединен с желобом и установлен между статорами двигателя со стороны обращенной к центру окружности, по дуге которой расположен желоб.
| Вибрационный конвейер | 1984 |
|
SU1177234A1 |
| Вибрационный конвейер | 1977 |
|
SU716924A1 |
| Вибропитатель | 1973 |
|
SU501944A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Способ вибрационного транспортирования штучных грузов и устройство для его осуществления | 1986 |
|
SU1630998A1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Вибрационный конвейер | 1986 |
|
SU1323477A1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |

