Изобретение относится к контрольно-измерительной и аналитической технике и предназначено для измерения плотности жидкостей.
Весовой непрерывный метод измерения плотности основан на взвешивании протекающей через сосуд постоянного объема контролируемой среды. Таким образом, конструкция прибора должна обеспечивать свободное перемещение сосуда при непрерывном поступлении и вытекании контролируемой среды и одновременно его подвижность для непрерывного взвешивания. Для подвода и отвода среды могут применяться гибкие гофрированные шланги (сильфоны), обеспечивающие подвижность измерительного участка в вертикальном направлении.
Известен весовой плотномер, измеряющий плотность путем взвешивания прямого подвижного участка трубопровода. Плотномер состоит из дифференциально-трансформаторного преобразователя, железного якоря, эластичное соединение с трубопроводом, компенсирующую усилие обмотку магнита. Для компенсации веса измерительной системы используется эталонная жидкость. (Измерения в промышленности. Справ. изд. в 3-х кн. Кн.2. Способы измерения и аппаратура: пер. с нем. / под ред. Профоса П. - 2-е изд., перераб. и доп. М.: Металлургия, 1990, стр.230-231, рис.3.6-124).
Недостатком такого плотномера является невысокая точность измерения.
Известен весовой петлевой плотномер с пневматической следящей системой, подробно описанной в (Кивилис С.С. Плотномеры. - М.: Энергия, 1980, стр.195-198, рис. 7-4).
Недостатком такого плотномера является невысокая точность измерения, а также сложность конструкции, что одинаково плохо и при производстве и для эксплуатации устройства.
Наиболее близким по технической сущности является весовой петлевой плотномер с электрической следящей системой, описанный в (Кивилис С.С. Плотномеры. - М.: Энергия, 1980, стр.198-200, рис.7-5). Он содержит петлевую трубу, для начального уравновешения которой служит рычажная система. При протекании через трубу жидкости большей плотности свободный конец трубы, опускаясь, передвигает ферромагнитный сердечник дифференциально-трансформаторного датчика перемещения. Сигнал рассогласования из датчика поступает в электронный усилитель с фазочувствительным демодулятором и преобразуется в постоянный ток, пропорциональный искомой плотности. Ток через миллиамперметр (или потенциометр) поступает в подвижную рамку ферродинамического силового механизма, где преобразуется в пропорциональную току силу, приложенную к центру рамки; рамка укреплена на плече рычажного механизма уравновешивания силы тяжести трубы.
Основным недостатком такого плотномера является невысокая точность измерений, обусловленная в том числе и наличием систематической составляющей погрешности, сложность конструкции и настройки прибора.
Техническим результатом изобретения является повышение точности весового плотномера и удобства его эксплуатации.
Технический результат достигается тем, что плотномер содержит петлевую U-образную трубу, закрепленную консольно на гибких манжетах, датчик перемещений и пружину, соединенные с петлевой U-образной трубой, постоянный магнит с обмоткой, эталонный груз, первый ключ, электропривод, второй ключ и вычислительно-управляющий блок, причем постоянный магнит с притянутым к нему эталонным грузом расположен неподвижно над петлевой трубой, электропривод механически соединен с пружиной 4, выход датчика перемещений связан со входом вычислительно-управляющего блока, выход и выход которого соединены с управляющими входами первого ключа и второго ключа соответственно, обмотка постоянного магнита и электропривод через первый ключ и второй ключ соответственно соединены с источником питания, а информационным выходом плотномера является третий выход вычислительно-управляющего устройства.
На чертеже представлена структурная схема весового плотномера.
Весовой плотномер содержит петлевую U-образную трубу 1, закрепленную консольно на гибких манжетах 2, датчик перемещений 3 и пружину 4, соединенные с петлевой U-образной трубой 1, постоянный магнит 6 с обмоткой 7, эталонный груз 5, первый ключ 8, электропривод 9, второй ключ 10 и вычислительно-управляющий блок 11, причем постоянный магнит 6 с притянутым к нему эталонным грузом 5 расположен неподвижно над петлевой трубой 1, электропривод 9 механически соединен с пружиной 4, выход датчика перемещений 3 связан со входом вычислительно-управляющего блока 11, выход 1 и выход 2 которого соединены с управляющими входами первого ключа 8 и второго ключа 10 соответственно, обмотка постоянного магнита 7 и электропривод через первый ключ 8 и второй ключ 10 соответственно соединены с источником питания, а информационным выходом плотномера является третий выход вычислительно-управляющего устройства 11.
Весовой плотномер работает следующим образом.
Вес U-образной вставки 1 в трубопроводе с жидкостью:

где mB - масса вставки,
ρж - плотность жидкости,
VB - объем U-образной вставки 1,
g - ускорение свободного падения.
Измерительной пружиной 4 вес U-образной вставки 1 преобразуется в линейное перемещение:

где КП - коэффициент преобразования пружины.
Линейное перемещение l U-образной вставки 1 датчиком преобразуется в код:

где КД - коэффициент преобразования датчика 3,
ΔА - аддитивная погрешность канала преобразования информации.
Отсюда:
Из формулы (4) видно, что источниками погрешности измерения плотности жидкости являются наличие аддитивной погрешности ΔА и нестабильность коэффициента преобразования датчика линейных перемещений KД и коэффициента преобразования пружины KП.
Значения этих коэффициентов изменяются под действием окружающей температуры или вследствие старения элементов. Кроме того, при градуировке прибора необходимо знание значений этих коэффициентов, для чего необходимо применение эталонных жидкостей с заданными плотностями. Это снижает удобство эксплуатации прибора.
Устранение перечисленных недостатков достигается применением тестовых методов повышения точности измерения.
Первоначально образцовая масса в виде ферромагнитного груза 5 притянута к постоянному магниту 6.
Для формирования аддитивного теста вычислительно-управляющий блок 11 с выхода 1 подает сигнал на первый ключ 8, через который напряжение питания, UП поступает на обмотку 7 постоянного магнита 6. Так, обмотка 7 создает противополе в магните 6, вследствие чего образцовая масса 5 отрывается от магнита 6 и устанавливается на U-образной вставке 1.
При этом вес U-образной вставки 1 с образцовой массой 5 становится равным:

Мультипликативный тест создается изменением жесткости измерительной пружины 4 посредством ее укорочения с помощью специального привода 9. При этом коэффициент преобразования пружины становится равным:

где KИ - коэффициент изменения длины пружины 4.
При настройке прибора датчик устанавливается так, чтобы при начальном весе и отсутствии жидкости в U-образной трубке 1 выходной сигнал был бы равен нулю:

Измерения проводятся в три такта:
1) При первом такте первый ключ 8 и второй ключ 10 закрыты. Образцовая масса 5 притянута к магниту 6. Пружина 4 имеет коэффициент преобразования КП. На выходе датчика 3 формируется сигнал:

где ΔА - аддитивная погрешность.
2) При втором такте вводится аддитивный тест. С выхода 1 вычислительно-управляющего блока 11 подается сигнал на управляющий вход первого ключа 8, вследствие чего напряжение питания UП через этот ключ поступает на обмотку 7 постоянного магнита 6. Магнит 6 размагничивается, и образцовая масса 5 устанавливается на U-образной трубе. На выходе датчика формируется сигнал:

где mO - масса образцового груза 5.
3) При третьем такте вводится мультипликативный тест. С выхода 2 вычислительно-управляющего блока 11 подается сигнал на управляющий вход второго ключа 10, вследствие чего напряжение питания UП через этот ключ поступает на электропривод 9. Электропривод 9 изменяет жесткость пружины 4 на заранее определенный коэффициент Ки. Одновременно вычислительно-управляющий блок 11 закрывает первый ключ 8, обмотка 7 обесточивается и магнит 6 притягивает к себе образцовую массу 5.
На выходе датчика формируется сигнал:

Полученные три сигнала N1, N2 и N3 с выхода датчика линейных перемещений 3 поступают на вход вычислительно-управляющего блока 11 и запоминаются в нем.
Затем вычислительно-управляющий блок 11 производит вычисления по алгоритму:



Отсюда

Из этой формулы видно, что точность измерения плотности жидкости зависит от точности задания образцовой массы mO, точности коэффициента изменения жесткости пружины КИ, точности задания объема U-образной трубы VB и точности вычислений. Все эти значения измеряются заранее с высокой точностью и в процессе эксплуатации прибора не изменяются.
Источники погрешности - аддитивная погрешность ΔA и мультипликативная погрешность, связанная с нестабильностью коэффициента преобразования датчика линейных перемещений KД и коэффициента преобразования измерительной
пружины KП, полностью исключаются. Кроме того, определение плотности жидкости по алгоритму (15) не требует предварительной градуировки прибора, так как числовое значение плотности измеряемой жидкости определяется заранее введенными в память вычислительно-управляющего блока 11 значениями mO, VB и KИ. Применение постоянного магнита 6 для удержания образцовой массы 5 в тех случаях, когда измерения не производятся, позволяет экономить расход электроэнергии. Питание в обмотку 7 магнита 6 подается только при формировании аддитивного теста. Во всех остальных случаях эта обмотка обесточена.
Предложенный плотномер отличается простотой конструкции, высокой точностью измерения и удобством эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Плотномер для буровых растворов | 1982 |
|
SU1081468A1 |
| Весовой плотномер | 1979 |
|
SU785685A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1995 |
|
RU2082151C1 |
| ВЕСОВОЙ ПЛОТНОМЕР ДЛЯ ЖИДКИХ СРЕД | 1972 |
|
SU343195A1 |
| Устройство для измерения уровня и плотности жидкости | 2020 |
|
RU2730404C1 |
| ДИНАМИЧЕСКИЙ ПЛОТНОМЕР ГРУНТА | 1995 |
|
RU2097487C1 |
| Устройство для измерения уровня и плотности жидкости | 2019 |
|
RU2710008C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ И ПЛОТНОСТИ | 2001 |
|
RU2188400C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД | 2006 |
|
RU2316753C1 |
| Весовой плотномер жидких сред | 1974 |
|
SU489992A1 |
Изобретение относится к контрольно-измерительной и аналитической технике и предназначено для измерения плотности жидкостей. Весовой плотномер содержит петлевую U-образную трубу, закрепленную консольно на гибких манжетах, датчик перемещений и пружину, соединенные с петлевой U-образной трубой. Также весовой плотномер дополнительно содержит постоянный магнит с обмоткой, эталонный груз, первый ключ, электропривод, второй ключ и вычислительно-управляющий блок. Причем постоянный магнит с притянутым к нему эталонным грузом расположен неподвижно над петлевой трубой. А также электропривод механически соединен с пружиной. Кроме того, выход датчика перемещений связан с входом вычислительно-управляющего блока, первый и второй выходы которого соединены с управляющими входами первого и второго ключей. При этом обмотка постоянного магнита и электропривод через первый и второй ключи соответственно соединены с источником питания, а информационным выходом плотномера является третий выход вычислительно-управляющего устройства.
Техническим результатом изобретения является повышение точности весового плотномера и удобства его эксплуатации. 1 ил.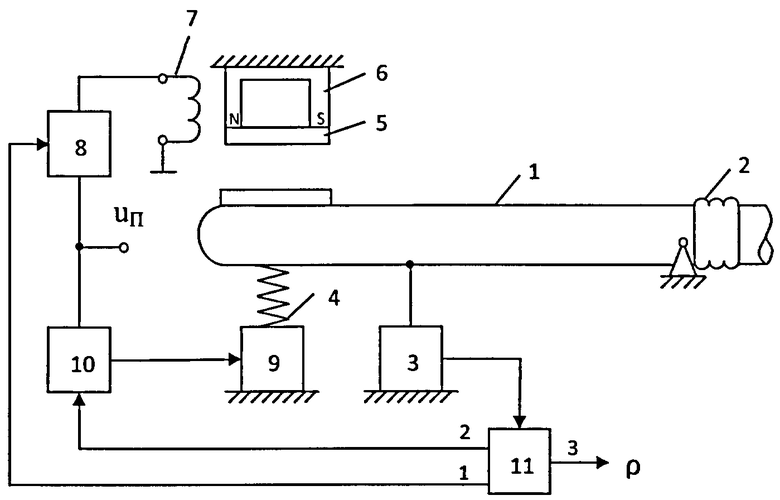
Весовой плотномер, содержащий петлевую U-образную трубу, закрепленную консольно на гибких манжетах, датчик перемещений и пружину, соединенные с петлевой U-образной трубой, отличающийся тем, что, с целью повышения точности измерения, в него дополнительно введены постоянный магнит с обмоткой, эталонный груз, первый ключ, электропривод, второй ключ и вычислительно-управляющий блок, причем постоянный магнит с притянутым к нему эталонным грузом расположен неподвижно над петлевой трубой, электропривод механически соединен с пружиной, выход датчика перемещений связан с входом вычислительно-управляющего блока, первый и второй выходы которого соединены с управляющими входами первого и второго ключей, обмотка постоянного магнита и электропривод через первый и второй ключи соответственно соединены с источником питания, а информационным выходом плотномера является третий выход вычислительно-управляющего устройства.
| Весовой плотнометр для жидких сред | 1981 |
|
SU960576A2 |
| ВЕСОВОЙ ПЛОТНОМЕР | 1972 |
|
SU423010A1 |
| Весовой плотномер для газожидкостного потока | 1987 |
|
SU1645884A1 |
| Наклонный судоподъемник | 1980 |
|
SU920100A1 |
| Весовой плотномер для газожидкостного потока | 1987 |
|
SU1645884A1 |

