Изобретение относится к измерительной технике и может быть использовано для измерения параметров, в частности скорости, прямолинейного движения проводников с током.
Применение изобретения наиболее целесообразно в области электрофизики, а именно при контроле скорости разгона токопроводящих плазменных сгустков в электродинамических магнитоплазменных ускорителях.
Известен способ измерения скорости движения объекта (авт. свид. СССР №1818588, МПК G01Р 3/64, БИ №20, 1993 г.) на участке траектории между двумя идентичными датчиками положения с колоколообразной передаточной характеристикой, заключающийся в непрерывном измерении сигналов U1, U2 возмущения двух упомянутых датчиков полем движущегося объекта, причем предварительно, до начала измерения, принимают значение масштабирующего коэффициента Xе численно равным значению перемещения объекта, соответствующего изменению выходного сигнала каждого датчика положения в е раз. В процессе измерения скорости определяют координатную функцию F по формуле  , а скорость ν определяют как
, а скорость ν определяют как  .
.
Описанный способ в условиях сильных импульсных помех имеет низкую помехозащищенность, обусловленную выполнением при определении скорости операции дифференцирования по времени координатной функции F, что приводит к "подчеркиванию" помех, присутствующих на входе измерительного устройства.
Наиболее близким к заявляемому изобретению (прототипом) является способ измерения скорости движения проводника с током (патент РФ №2208793, МПК 7 G01Р 3/50, БИ №20, 2003) на участке траектории между двумя идентичными индукционными датчиками, заключающийся в непрерывном измерении сигналов ε1, ε2 возмущения двух упомянутых датчиков полем движущегося проводника, определении информативного параметра G1 как среднего геометрического этих сигналов  , причем скорость ν движения проводника с током определяют как величину, пропорциональную упомянутому информативному параметру G1. В соответствии со способом-прототипом предварительно, до начала измерения, принимают значение масштабирующего коэффициента Хе численно равным значению перемещения проводника, соответствующему изменению выходного сигнала индукционного датчика в е раз, в процессе измерения скорости непрерывно измеряют ток i, протекающий в движущемся проводнике, а скорость ν движения проводника с током определяют как
, причем скорость ν движения проводника с током определяют как величину, пропорциональную упомянутому информативному параметру G1. В соответствии со способом-прототипом предварительно, до начала измерения, принимают значение масштабирующего коэффициента Хе численно равным значению перемещения проводника, соответствующему изменению выходного сигнала индукционного датчика в е раз, в процессе измерения скорости непрерывно измеряют ток i, протекающий в движущемся проводнике, а скорость ν движения проводника с током определяют как  , где
, где  - постоянный коэффициент;
- постоянный коэффициент;
µ0=4π·10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика.
Недостатком способа-прототипа является уменьшение точности измерения скорости движущегося проводника с током при увеличении степени нестабильности его пространственной конфигурации, например случайной величины длины движущегося плазменного токопроводящего сгустка.
Задачей предлагаемого изобретения является повышение точности измерения скорости движения проводника с током в условиях изменения его пространственной конфигурации в процессе движения.
Поставленная задача решается за счет того, что в способе измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками, заключающемся в непрерывном измерении сигналов ε1, ε2 возмущения двух упомянутых датчиков полем движущегося проводника, определении информативного параметра G1 как среднего геометрического этих сигналов  , определении скорости ν движения проводника с током как величины, пропорциональной упомянутому информативному параметру G1, в процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр G2 как среднее геометрическое этих сигналов
, определении скорости ν движения проводника с током как величины, пропорциональной упомянутому информативному параметру G1, в процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр G2 как среднее геометрическое этих сигналов  , а скорость ν движения проводника с током определяют как
, а скорость ν движения проводника с током определяют как  , где
, где  - постоянный коэффициент;
- постоянный коэффициент;
КB [В/Тл] - чувствительность датчиков магнитной индукции; N, SД - соответственно число витков и площадь сечения катушки каждого индукционного датчика;  - коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
- коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
От прототипа изобретение отличается тем, что в процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр G2 как среднее геометрическое этих сигналов  , а скорость ν движения проводника с током определяют как
, а скорость ν движения проводника с током определяют как  , где
, где  - постоянный коэффициент;
- постоянный коэффициент;
КB [В/Тл] - чувствительность датчиков магнитной индукции; N, SД - соответственно число витков и площадь сечения катушки каждого индукционного датчика;  - коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
- коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
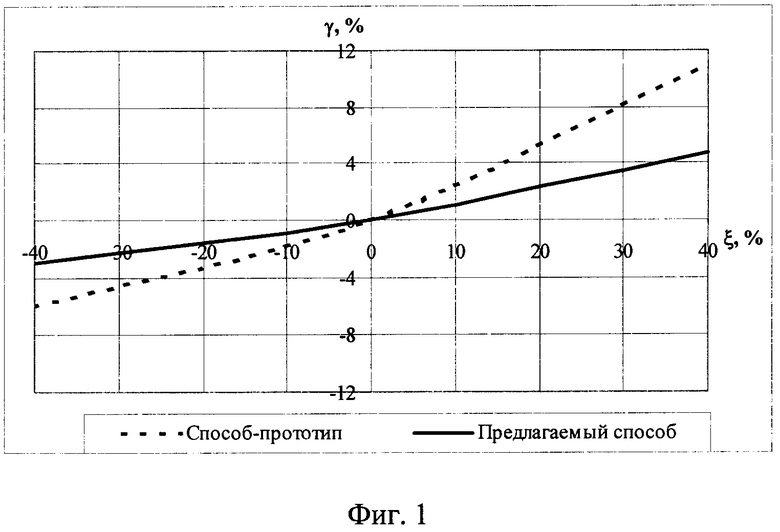
На фиг.1 показаны результаты компьютерного моделирования зависимости функции γ от величины ξ, где ξ=(l/lном)·100%; lном и l - соответственно номинальное и фактическое значения изменяющейся продольной длины движущегося объемного проводника с током; γ={[νи(l)-νи(lном)]/νи(lном)}·100%; νи(lном) и νи(l) - измеренные в одной точке траектории (середине интервала между датчиками) значения скорости проводника соответственно длиной lном и l при одном значении его истинной скорости. Таким образом, функция γ характеризует инвариантность способа измерения скорости к такому мешающему фактору, как случайные изменения пространственной конфигурации (продольной длины) контролируемого проводника с током.
На фиг.2 изображено устройство, реализующее заявляемый способ измерения скорости движения проводника с током, движущегося по проводящим направляющим, обеспечивающим протекание тока в контролируемом проводнике и образующим траекторию его движения. Оно содержит два идентичных индукционных датчика (ИД1) 1 и (ИД2) 2, на участке траектории между которыми производится измерение скорости, и два идентичных датчика магнитной индукции (ДМИ3) 3 и (ДМИ4) 4 (например, датчики Холла). Пара индукционных датчиков (ИД1) 1 и (ИД2) 2 и пара датчиков магнитной индукции (ДМИ3) 3 и (ДМИ4) 4 подключены соответственно через пару управляемых ключей 5 и 6 и пару управляемых ключей 7 и 8 к соответствующим первым и вторым входам соответствующих устройств умножения (УУ1) 9 и (УУ2) 10, а выход индукционного датчика (ИД1) 1, кроме того, соединен с входом порогового элемента (ПЭ) 11, выход которого подключен к управляющим входам управляемых ключей 5, 6, 7 и 8. Выходы устройств умножения (УУ1) 9 и (УУ2) 10 соединены с входами соответствующих устройств извлечений квадратного корня (УИК1) 12 и (УИК2) 13, выходы которых подключены, соответственно к входу "делимое" и входу "делитель" устройства деления (УД) 14. Выход устройства деления (УД) 14 соединен с первым входом третьего устройства умножения (УУ3) 15, второй вход которого является общим входом устройства для измерения скорости и предназначен для подачи сигнала, пропорционального значению постоянного коэффициента  . Выход устройства деления (УУ3) 15 является общим выходом устройства для измерения скорости.
. Выход устройства деления (УУ3) 15 является общим выходом устройства для измерения скорости.
Как известно (статья: Cook R.W. Observation and analysis of current carrying plasmas in rail gun. // IЕЕЕ Transactions on Magnetics. 1986. V.22. No.6. P.1423-1428), магнитная индукция В поля движущегося проводника с током i может быть описана следующим образом:

а выходной сигнал ε возмущения индукционного датчика полем движущегося проводника представляется как

где F(x(t)) с размерностью [1/м] и f(х(t)) с размерностью [1/м2] - сложные функции от координаты x(t) положения проводника на траектории его движения; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; ν - скорость перемещения проводника с током; µ0=4π·10-7 [Гн/м] - магнитная постоянная; i - ток, протекающий в движущемся проводнике.
В предлагаемом способе аналогично способу-прототипу используется тот факт, что функции сигналов двух индукционных датчиков, реагирующих на поле, создаваемое проводником с током, движущимся на участке траектории между ними, могут быть аппроксимированы выражениями, преобразованными из (2) следующим образом:


где g(x(t)) - безразмерная функция от координаты x(t) положения проводника на траектории его движения, g-1(x(t)) - функция, обратная g(x(t)), а посредством коэффициента k1 [м] задается размерность [1/м2] для мультипликативной составляющей f(x(t)) в (2).
Таким образом, как видно из (3) и (4), измеряя сигналы индукционных датчиков
ε1, ε2, можно определять информативный параметр G1 как их среднее геометрическое  , который не зависит от координаты положения х движущегося проводника, а зависит только от его скорости ν и тока в нем i:
, который не зависит от координаты положения х движущегося проводника, а зависит только от его скорости ν и тока в нем i:
Функции магнитной индукции В поля движущегося проводника в двух точках, смещенных относительно друг друга вдоль траектории его движения, могут быть аппроксимированы выражениями, преобразованными из (1) аналогично тому, как (3) и (4) были преобразованы из (2):


где q(x(t)) - безразмерная функция от координаты x(t) положения проводника на траектории его движения, q-1(x(t)) - функция, обратная q(x(t)), а посредством коэффициента k2 [м] задается размерность [1/м] для мультипликативной составляющей F(x(t)) в (1).
Если в этих двух упомянутых точках пространства дополнительно разместить два идентичных датчика магнитной индукции (например, датчики Холла), их сигналы U1,
U2 возмущения полем движущегося проводника будут пропорциональны соответствующим функциям магнитной индукции согласно (6) и (7):


где КВ [В/Тл] - чувствительность датчика магнитной индукции.
Следовательно, как видно из (8) и (9), дополнительно измеряя сигналы, пропорциональные магнитной индукции U1, U2, можно аналогично определению информативного параметра G1 согласно (5) определять второй информативный параметр G2 как их среднее геометрическое  , который не будет зависеть от координаты положения х движущегося проводника, а будет зависеть только от тока в нем i:
, который не будет зависеть от координаты положения х движущегося проводника, а будет зависеть только от тока в нем i:

Таким образом, измеряя сигналы ε1, ε2 и U1, U2 возмущения соответственно двух идентичных индукционных датчиков и двух идентичных датчиков магнитной индукции (например, датчиков Холла) полем движущегося проводника с током и предварительно непрерывно определяя два информативных параметра G1, G2 согласно (5) и (10), можно определять текущую скорость ν движущегося проводника как

где  - коэффициент, который определяют по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
- коэффициент, который определяют по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0.
Обозначив через С постоянный коэффициент  в (11), можно записать выражение для скорости ν движения проводника с током в окончательном виде:
в (11), можно записать выражение для скорости ν движения проводника с током в окончательном виде:
 .
.
Как видно из графиков, показанных на фиг.1, предлагаемый способ по сравнению со способом-прототипом обеспечивает гораздо более слабое влияние изменений конфигурации проводника (продольной длины) на результаты измерения его скорости.
Следовательно, дополнительное введение операции измерения сигналов, пропорциональных магнитной индукции поля, например, с помощью датчиков Холла, согласно предлагаемому способу позволяет повысить по сравнению со способом-прототипом точность измерений скорости движения проводника с током в условиях нестабильности его пространственной конфигурации.
Устройство, реализующее заявляемый способ измерения скорости движения проводника с током (фиг.2), функционирует следующим образом.
При подходе движущегося проводника с током к первому по направлению движения из двух индукционных датчиков (ИД1) 1 на выходе порогового элемента (ПЭ) 11 вырабатывается управляющий сигнал (пороговый элемент (ПЭ) 11 срабатывает при нарастании сигнала индукционного датчика (ИД1) 1 до максимума), воздействующий на управляемые ключи 5, 6, 7 и 8. В результате они включаются и происходят подключения индукционных датчиков (ИД1) 1 и (ИД2) 2 соответственно к первому и второму входам устройства умножения (УУ1) 9 и подключения датчиков магнитной индукции (ДМИ1) 3 и (ДМИ2) 4 соответственно к первому и второму входам устройства умножения (УУ2) 10. На выходах устройств умножения (УУ1) 9 и (УУ2) 10 появляются сигналы соответственно ε1·ε2 и U1·U2, а на выходах устройств извлечения квадратного корня (УИК1) 12 и (УИК2) 13 формируются сигналы, пропорциональные значениям соответственно первого и второго информативных параметров  и
и  . На выходе устройства деления (УД) 14 вырабатывается сигнал отношения двух информативных параметров G1/G2, а на выходе устройства умножения (УУЗ) 15 непрерывно формируется сигнал
. На выходе устройства деления (УД) 14 вырабатывается сигнал отношения двух информативных параметров G1/G2, а на выходе устройства умножения (УУЗ) 15 непрерывно формируется сигнал  скорости ν движения проводника с током.
скорости ν движения проводника с током.
Использование заявляемого технического решения позволит повысить точность измерения скорости движения проводника с током.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2011 |
|
RU2477489C1 |
| Способ измерения скорости движения проводника с током | 2019 |
|
RU2730885C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2001 |
|
RU2208793C1 |
| КВАНТОВЫЙ СПОСОБ ИЗМЕРЕНИЯ НАПРЯЖЁННОСТИ, НАПРАВЛЕНИЯ, ГРАДИЕНТА МАГНИТНОГО ПОЛЯ ЗЕМЛИ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2017 |
|
RU2680629C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ГРАНИЦЫ РАЗДЕЛА ДВУХ ВЕЩЕСТВ В РЕЗЕРВУАРЕ | 2018 |
|
RU2698575C1 |
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| Способ и устройство для бесконтактного определения удельного электросопротивления металлов в области высоких температур | 2018 |
|
RU2687504C1 |
| Способ измерения скорости движущейся плазмы в магнитоплазменном электродинамическом ускорителе | 2016 |
|
RU2651633C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ГРАНИЦЫ РАЗДЕЛА ДВУХ ЖИДКОСТЕЙ В ЕМКОСТИ | 2020 |
|
RU2753830C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения параметров, в частности скорости, прямолинейного движения проводников с током. Способ измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками основан на непрерывном измерении сигналов ε1, ε2 возмущения двух упомянутых датчиков полем движущегося проводника, определении информативного параметра G1 как среднего геометрического этих сигналов  , причем скорость ν движения проводника с током определяют как величину, пропорциональную упомянутому информативному параметру G1. В процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр
, причем скорость ν движения проводника с током определяют как величину, пропорциональную упомянутому информативному параметру G1. В процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр
G2 как среднее геометрическое этих сигналов  , а скорость ν движения проводника с током определяют как
, а скорость ν движения проводника с током определяют как  , где
, где  - постоянный коэффициент; КВ [В/Тл] - чувствительность датчиков магнитной индукции; N, SД - соответственно число витков и площадь сечения катушки каждого индукционного датчика;
- постоянный коэффициент; КВ [В/Тл] - чувствительность датчиков магнитной индукции; N, SД - соответственно число витков и площадь сечения катушки каждого индукционного датчика;  - коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0. Технический результат: повышение точности измерения скорости движения проводника с током. 2 ил.
- коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате x0. Технический результат: повышение точности измерения скорости движения проводника с током. 2 ил.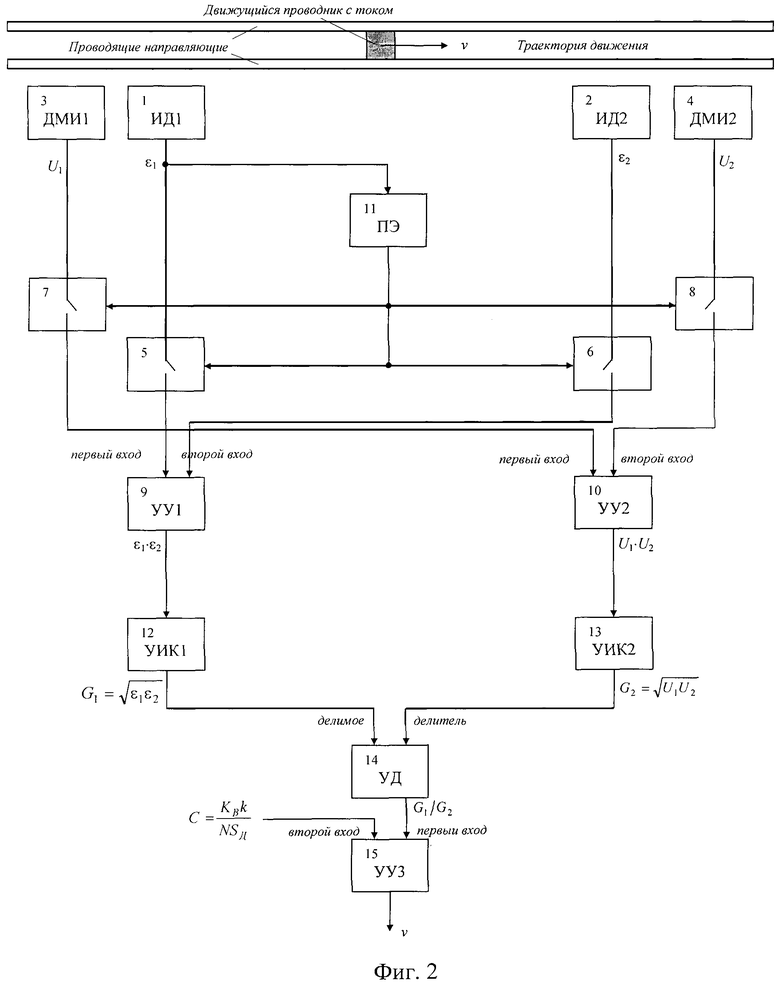
Способ измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками, заключающийся в непрерывном измерении сигналов ε1, ε2 возмущения двух упомянутых датчиков полем движущегося проводника, определении информативного параметра G1 как среднего геометрического этих сигналов , причем скорость ν движения проводника с током определяют как величину, пропорциональную упомянутому информативному параметру G1, отличающийся тем, что в процессе измерения скорости дополнительно непрерывно измеряют с помощью датчиков магнитной индукции сигналы U1, U2, пропорциональные магнитной индукции поля в двух точках траектории, которые выбирают таким образом, чтобы координата x0 середины интервала между ними совпадала с координатой середины интервала между точками расположения упомянутых индукционных датчиков, одновременно определяют второй информативный параметр G2 как среднее геометрическое этих сигналов , а скорость ν движения проводника с током определяют как
,
где - постоянный коэффициент; КВ [В/Тл] - чувствительность датчиков магнитной индукции; N, SД - соответственно число витков и площадь сечения катушки каждого индукционного датчика; - коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования, при этом ν0 - определяемое экспериментально или по результатам моделирования значение скорости движения идентичного или моделируемого проводника с током в координате х0.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2001 |
|
RU2208793C1 |
| Способ измерения скорости движения объекта | 1988 |
|
SU1744652A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2169926C1 |
| GB 1354762 A, 05.06.1974. | |||

