Изобретение относится к измерительной технике и может быть использовано для измерения параметров, в частности скорости, прямолинейного движения проводников с током.
Известен способ измерения скорости движения объекта (авт. свид. СССР №1818588, МПК G01Р 3/64, БИ №20, 1993 г.) на участке траектории между двумя идентичными датчиками положения с колоколообразной передаточной характеристикой, заключающийся в непрерывном измерении сигналов U1, U2 возмущения двух упомянутых датчиков полем движущегося объекта, причем, предварительно, до начала измерения принимают значение масштабирующего коэффициента Хe, численно равным значению перемещения объекта, соответствующего изменению выходного сигнала каждого датчика положения в е раз. В процессе измерения скорости определяют координатную функцию F по формуле  а скорость v движения объекта определяют как
а скорость v движения объекта определяют как 
Описанный способ имеет низкую помехозащищенность в условиях наличия сильных импульсных помех, обусловленную выполнением при определении скорости операции дифференцирования по времени координатной функции F, что приводит к "подчеркиванию" помех, присутствующих на входе измерительного устройства.
Наиболее близким к заявляемому (прототипом) является способ измерения скорости движения проводника с током (Пат. 2208793 Рос. Федерация, МПК G01P 3/50 - №2001128575/28, опубл. 20.07.2003) на участке траектории между двумя идентичными индукционными датчиками, предполагающий измерение тока I, протекающего в проводнике. В соответствии со способом-прототипом непрерывно измеряют сигналы U1, U2 возмущения двух упомянутых датчиков полем движущегося проводника, причем, предварительно, до начала измерения принимают значение масштабирующего коэффициента Хе, численно равным значению перемещения проводника, соответствующего изменению выходного сигнала датчика положения в е раз, а скорость v движения проводника с током определяют как  где
где  - постоянный коэффициент; μ0 = 4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика.
- постоянный коэффициент; μ0 = 4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика.
Недостатком способа-прототипа является то, что в измерительном устройстве, которое будет реализовывать этот способ измерения, необходимо наличие блока извлечения квадратного корня. Упомянутый блок является относительно сложным, обуславливающим дополнительную инструментальную погрешность, в случае его реализации в аппаратном аналоговом варианте. В случае использования цифровой обработки первичных сигналов блок извлечения квадратного корня может быть реализован виртуально, как отдельный программный модуль. Но и в этом случае вычисление квадратного корня является более сложной вычислительной операцией, обуславливающей большие задержки времени, по сравнению с линейными операциями. Таким образом, независимо от варианта исполнения измерительного устройства, реализующего способ-прототип, необходимость извлекать квадратный корень усложняет процедуру измерения скорости движения проводника с током.
Задачей предполагаемого изобретения является упрощение измерения скорости движения проводника с током.
Технический результат изобретения заключается в том, что в предлагаемом способе, в отличие от способа-прототипа, присутствует линейная зависимость между первичным измерительным сигналом и окончательным информативным параметром - значением скорости движения проводника с током, за счет чего решается задача упрощения измерения скорости.
Изобретение заключается в том, что в способе измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками, предполагающем измерение тока I, протекающего в проводнике, непрерывно измеряют разностный сигнал ud (t) двух упомянутых датчиков, возмущаемых полем движущегося проводника, а скорость v(t) его движения определяют как  где t - время;
где t - время;  ; μ0=4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
; μ0=4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
От прототипа изобретение отличается тем, что непрерывно измеряют разностный сигнал ud (t) двух индукционных датчиков, возмущаемых полем движущегося проводника, а скорость v(t) его движения определяют как  где t - время;
где t - время;  ; μ0=4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
; μ0=4π⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
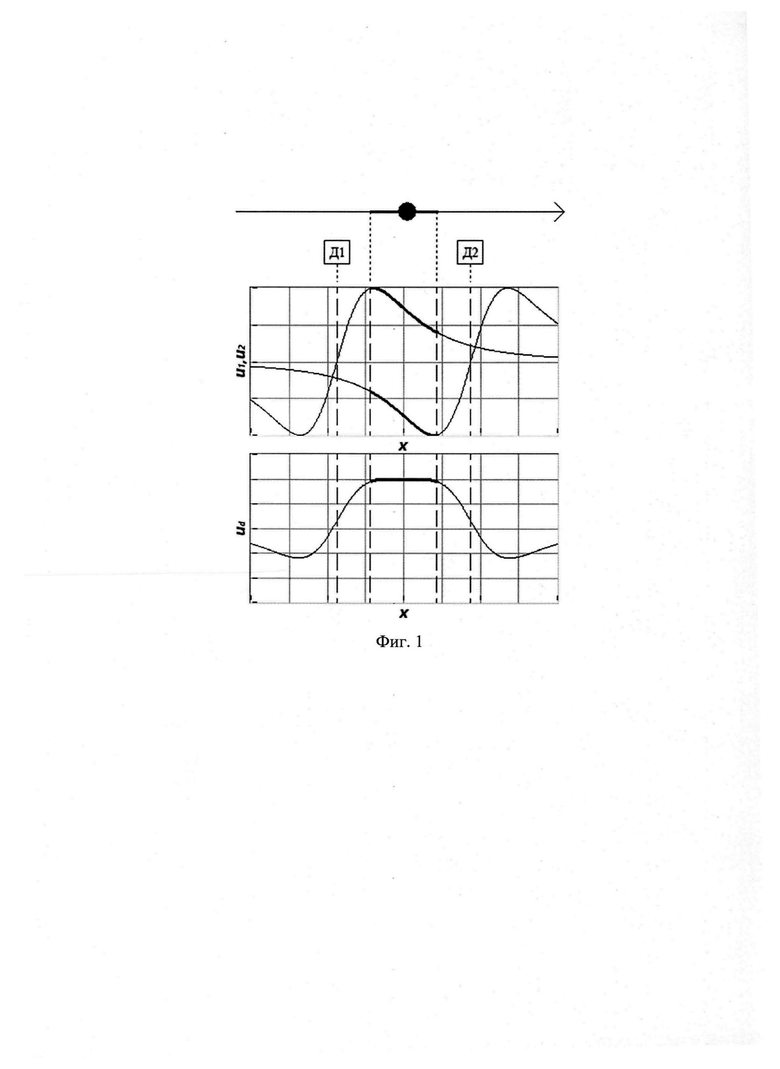
На фиг. 1 приведены результаты компьютерного моделирования сигналов u1(t), u2(t) двух датчиков, реагирующих на движущийся проводник с током, а также их разностный сигнал ud(t). Сигналы показаны как функции от координаты х положения проводника с током.
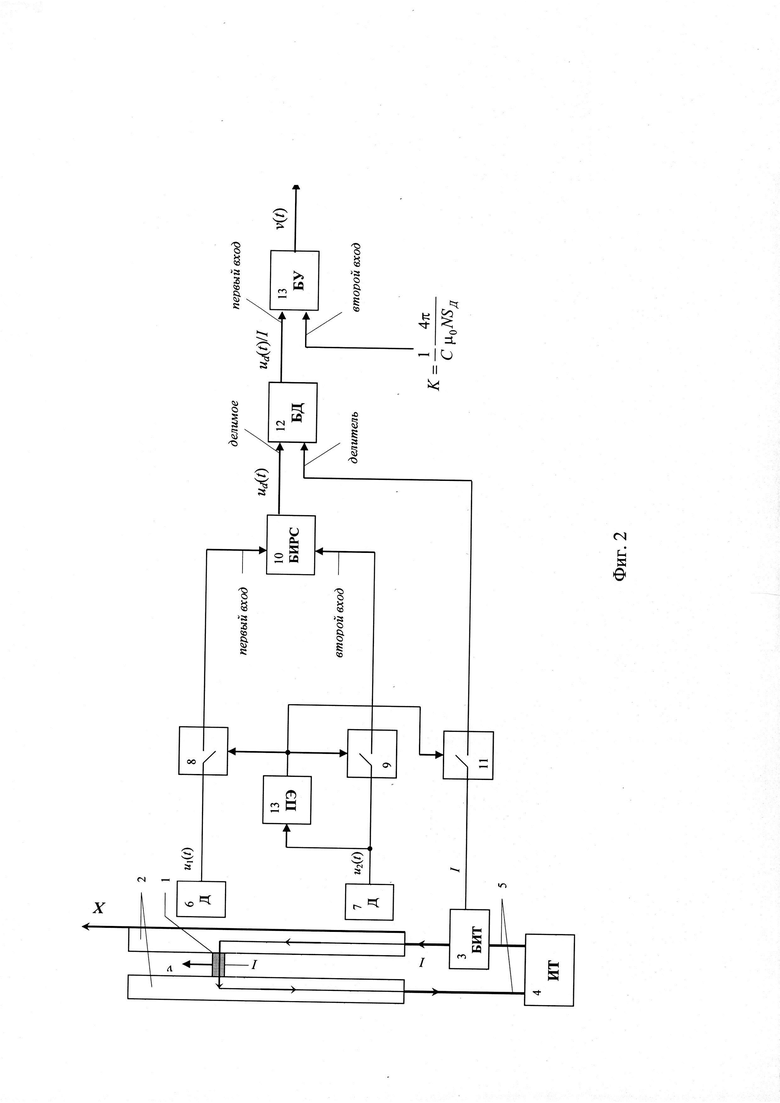
На фиг. 2 приведена структурная схема устройства, реализующего предлагаемый способ измерения скорости движения проводника с током, например, токопроводящего плазменного сгустка в канале электродинамического ускорителя плазмы (Колесников П.М. Электродинамическое ускорение плазмы. - М.: Атомиздат, 1971. с. 389).
Как известно (статья: Cook R.W. Observation and analysis of current carrying plasmas in rail gun //IEEE Transactions on Magnetics. 1986. V. 22. No. 6. P. 1423-1428), выходной сигнал и индукционного датчика, возмущаемого магнитным полем движущегося проводника с током, может быть описан следующим образом:

где N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; v - скорость перемещения проводника с током; μ0=4π⋅10-7 [Гн/м] - магнитная постоянная; I - ток, протекающий в движущемся проводнике; ƒ[x(t)] [1/м2] - мультипликативная составляющая сигнала индукционного датчика, представляющая собой сложную функцию от координаты х(t) положения проводника на траектории его движения; t - время. Таким образом, функции выходных сигналов пары датчиков, установленных вдоль траектории движения проводника с током при его нахождении между датчиками, могут быть описаны с использованием (1) следующими выражениями:


где L - расстояние между датчиками, а за нулевую точку координат х принимается середина этого расстояния.
Далее, используя (2) и (3) запишем выражение для разностного сигнала ud[x(t)] двух датчиков:

Как видно (см. фиг. 1) на функции разностного сигнала можно выделить участок, который с достаточной степенью точности может быть охарактеризован как постоянный, то есть не изменяющийся с изменением х. Это соответствует взаимной компенсации изменений функций ƒ[x(t)+L/2] и ƒ[x(f)-L/2] в правой части (4). Следовательно, составляющая {ƒ[x(t)+L/2]-ƒ[x(t)-L/2]} в (4) может быть с достаточной степенью точности замещена некоторым постоянным коэффициентом С, имеющим размерность [1/м2]. С учетом этого перепишем выражение (4) следующим образом:

Таким образом, как следует из (5), непрерывно измеряя разностный сигнал ud(t) двух идентичных индукционных датчиков, возмущаемых полем проводника с током, движущегося на участке траектории между ними, и выполняя операцию измерения тока I, протекающего в проводнике, можно определять скорость v(t) движения проводника с током как

Обозначив через K постоянный коэффициент  в (6), можно записать выражение для скорости v(t) движения проводника с током в окончательном виде:
в (6), можно записать выражение для скорости v(t) движения проводника с током в окончательном виде:
Таким образом, в предлагаемом способе, в отличие от способа-прототипа, присутствует линейная зависимость между первичным измерительным сигналом и окончательным информативным параметром - значением скорости движения проводника с током, за счет чего решается задача упрощения измерения скорости.
Заявляемый способ измерения скорости движения проводника с током может быть реализован, например, следующим устройством (см. фиг. 2).
Проводник 1 с током (например, плазменный сгусток) движется по проводящим направляющим 2, обеспечивающим протекание тока в проводнике и образующим траекторию его движения. Устройство содержит блок измерения тока (БИТ) 3, сформированного, например, на базе так называемого пояса Роговского (Панин В.В., Степанов Б.М. Измерение импульсных магнитных и электрических полей. - М.:, Энергоатомиздат, 1987. с. 120). Указанный ток протекает в электрической цепи, которая образована источником тока (ИТ) 4, питающими проводниками 5, проводящими направляющими 2 и движущимся проводником 1. Устройство для измерения скорости содержит также два идентичных индукционных датчика (Д) 6 и 7, на участке траектории между которыми производится измерение скорости движущегося проводника 1. Датчики 6 и 7 подключены через управляемые ключи 8 и 9 соответственно к первому и второму входам блока измерения разностного сигнала (БИРС) 10 (сформированного, например, на базе дифференциального усилителя), а БИТ 3 соединен через управляемый ключ 11 с входом "делитель" блока деления (БД) 12. Управляющие входы управляемых ключей 8, 9 и 11 подключены к выходу порогового элемента (ПЭ) 13, вход которого соединен с выходом датчика 7, который является первым по направлению движения объекта. Выход БИРС 10 подключен к входу "делимое" БД 12. Выход БД 12 подключен к первому входу блока умножения (БУ) 13, а второй вход БУ 13 является общим входом устройства для измерения скорости и предназначен для подачи сигнала, пропорционального значению постоянного коэффициента  Выход БУ 13 является общим выходом устройства для измерения скорости.
Выход БУ 13 является общим выходом устройства для измерения скорости.
Устройство функционирует следующим образом.
При проходе движущегося проводника с током первого по направлению движения датчика 7, на выходе ПЭ 13 вырабатывается управляющий сигнал (ПЭ 13 срабатывает при нарастании сигнала датчика 7 до определенного значения), воздействующий на управляемые ключи 8, 9 и 11. В результате управляемые ключи 8,9, 11 включаются и происходят подключения датчиков 6 и 7 соответственно к первому и второму входам БИРС 10, а БИТ 3 соединяется с входом "делитель" БД 12. На выходе БИРС 10 появляется разностный сигнал ud(t) датчиков 6 и 7. Этот сигнал подается на вход "делимое" БД 12, на вход "делитель" которого с выхода БИТ 3 непрерывно поступает сигнал, пропорциональный току I, который протекает в движущемся проводнике 1. Таким образом, на выходе БД 12 вырабатывается сигнал отношения  и передается на первый вход БУ 13. На второй вход БУ 13 подается сигнал, пропорциональный значению постоянного коэффициента
и передается на первый вход БУ 13. На второй вход БУ 13 подается сигнал, пропорциональный значению постоянного коэффициента  что обеспечивает непрерывное формирование на выходе БУ 13 сигнала
что обеспечивает непрерывное формирование на выходе БУ 13 сигнала  пропорционального скорости v движения проводника 1 с током.
пропорционального скорости v движения проводника 1 с током.
Использование заявляемого технического решения позволит упростить измерение скорости движения проводника с током.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2001 |
|
RU2208793C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2008 |
|
RU2381509C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2011 |
|
RU2477489C1 |
| Способ измерения скорости движения проводника с током | 1990 |
|
SU1826066A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2001 |
|
RU2199753C1 |
| Способ и устройство для бесконтактного определения удельного электросопротивления металлов в области высоких температур | 2018 |
|
RU2687504C1 |
| Способ измерения скорости движения объекта | 1991 |
|
SU1818588A1 |
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ МЕТОДОМ МАГНИТНОЙ ИНДУКЦИОННОЙ ТОМОГРАФИИ | 1996 |
|
RU2129406C1 |
| Способ измерения скорости движения проводника с током | 1988 |
|
SU1672377A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ЭЛЕКТРОПРОВОДЯЩЕЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531156C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения скорости, прямолинейного движения проводников с током, в частности, при контроле скорости разгона токопроводящих плазменных сгустков в электродинамических магнитоплазменных ускорителях. Технический результат изобретения заключается в том, что присутствует линейная зависимость между первичным измерительным сигналом и значением скорости движения проводника с током, за счет чего решается задача упрощения измерения скорости. Изобретение представляет собой способ измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками, содержащий измерение тока I, протекающего в проводнике. В соответствии с предлагаемым способом непрерывно измеряют разностный сигнал ud(t) двух упомянутых датчиков, возмущаемых полем движущегося проводника, рассчитывают вспомогательный коэффициент К и определяют скорость движения проводника. 2 ил.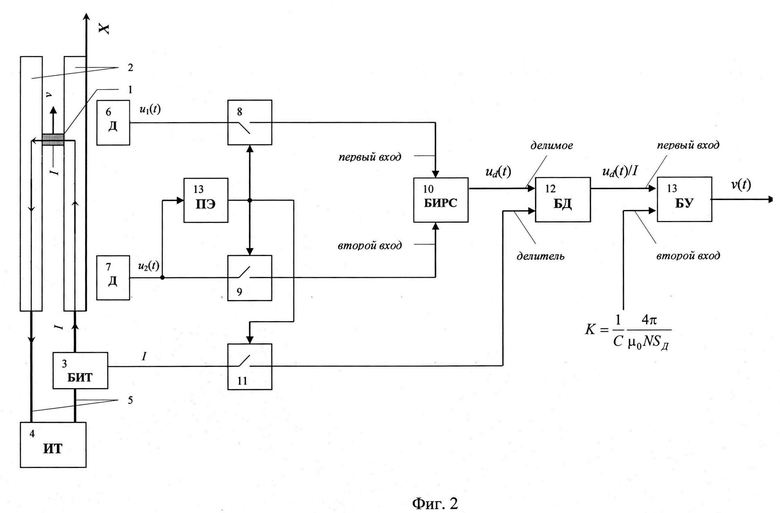
Способ измерения скорости движения проводника с током на участке траектории между двумя идентичными индукционными датчиками, предполагающий измерение тока I, протекающего в проводнике, отличающийся тем, что непрерывно измеряют разностный сигнал ud(t) двух упомянутых датчиков, возмущаемых полем движущегося проводника, а скорость v(t) его движения определяют как
где t - время;  ; μ0=4⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
; μ0=4⋅10-7 - магнитная постоянная; N, SД - соответственно число витков и площадь сечения катушки индукционного датчика; С - постоянный коэффициент, определяемый по результатам предварительного физического эксперимента или компьютерного моделирования.
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2008 |
|
RU2381509C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2001 |
|
RU2208793C1 |
| Способ и автоматическая система калибровки газоанализаторов с применением источников микропотока | 2019 |
|
RU2722475C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ПРОВОДНИКА С ТОКОМ | 2011 |
|
RU2477489C1 |

