Область техники
Изобретение относится к системе обтекателя втулок воздушных винтов винтокрылого летательного аппарата, имеющего систему соосных воздушных винтов противоположного вращения, и, в частности, к системе предотвращения вращения, которая удерживает от вращения обтекатель вала, установленный между обтекателем верхней втулки и обтекателем нижней втулки.
Аэродинамическое сопротивление, связанное с втулкой воздушного винта винтокрылого летательного аппарата, как правило, является существенной частью общего аэродинамического сопротивления, обычно от 25 до 30% для стандартных одновинтовых вертолетов. Сопротивление системы воздушного винта увеличивается для винтокрылого летательного аппарата, имеющего систему соосных воздушных винтов противоположного вращения, главным образом из-за наличия двух втулок воздушных винтов и соединительного вала между ними. Для высокоскоростного вертолета увеличенное сопротивление, создаваемое системой соосных воздушных винтов противоположного вращения, может привести к относительно существенным потерям мощности.
Аэродинамическое сопротивление системы двух соосных воздушных винтов противоположного вращения образуется тремя основными компонентами: узлом втулки верхнего воздушного винта, узлом втулки нижнего воздушного винта и узлом соединительного вала основных воздушных винтов. Доля в сопротивлении каждой из втулок может составлять приблизительно 40%, и 20% составляет доля узла соединительного вала основных воздушных винтов. Обычно на втулку верхнего воздушного винта и втулку нижнего воздушного винта устанавливается система обтекателя втулки воздушного винта, так что общее сопротивление винтокрылого летательного аппарата уменьшается. Однако соединительный вал основных воздушных винтов между узлом втулки верхнего воздушного винта и узлом втулки нижнего воздушного винта остается, как правило, открытым.
Исходя из ряда причин, включающих в себя, но не ограничиваясь этим, уменьшенное сопротивление и низкую возможность обнаружения, были разработаны профилированные обтекатели вала, чтобы закрыть открытый соединительный вал основных воздушных винтов.
Обтекатель вала устанавливается в систему соосных воздушных винтов противоположного вращения, причем все окружающие его компоненты совершают вращательное движение, между обтекателем верхней втулки и обтекателем нижней втулки, с помощью подшипникового узла таким образом, что обтекатель вала располагается вдоль фюзеляжа в прямолинейном горизонтальном полете, причем он свободно может изменять свое положение таким образом, чтобы располагаться вдоль набегающего воздушного потока во время низкоскоростного маневрирования.
Во время прямолинейного горизонтального полета воздушный поток стабилизирует обтекатель вала в подшипниковом узле относительно вращающегося соединительного вала основных воздушных винтов. Однако во время зависания и низкоскоростного маневрирования, силы трения, действующие на подшипниковый узел, могут заставить обтекатель вала вращаться нежелательным образом синхронно с системой основных воздушных винтов. Вращение обтекателя вала может увеличить сопротивление и уменьшить преимущества низкой возможности обнаружения, даваемые профилированным обтекателем вала.
Поэтому, желательно создать систему предотвращения вращения для обтекателя вала, находящегося в окружении совершающих вращательное движение компонентов между обтекателем верхней втулки воздушного винта и обтекателем нижней втулки воздушного винта системы обтекателя втулок соосных воздушных винтов противоположного вращения.
Краткое описание изобретения
Система обтекателя втулок воздушных винтов для системы двух соосных воздушных винтов противоположного вращения согласно настоящему изобретению в целом включает в себя обтекатель верхней втулки, обтекатель нижней втулки и обтекатель вала, расположенный между ними. Система обтекателя втулок воздушных винтов прикреплена к системе соосных воздушных винтов противоположного вращения с помощью подшипникового узла таким образом, что азимутальное положение обтекателя вала вокруг оси вращения основных воздушных винтов относительно корпуса вертолета может регулироваться путем его вращения с помощью системы предотвращения вращения. Система предотвращения вращения регулирует положение обтекателя вала вокруг оси вращения таким образом, чтобы предотвратить вероятное свободное вращение обтекателя вала синхронно с валом любого из воздушных винтов.
Один вариант системы предотвращения вращения включает в себя систему с ременным приводом, которая самостоятельно регулируется всякий раз, когда летательный аппарат достигает такой скорости прямолинейного горизонтального полета, при которой сила воздушного потока превышает силу трения между ремнями и шкивами системы предотвращения вращения. Это позволяет использовать систему предотвращения вращения для более низких нагрузок и, таким образом, позволяет получить облегченную систему.
Другой вариант системы предотвращения вращения включает в себя верхнюю панель, нижнюю панель, узел приводного конуса и узел стационарного опорного кольца. Верхняя панель вращается вместе с валом одного воздушного винта, в то время как нижняя панель вращается вместе с валом другого воздушного винта. Узел приводного конуса включает в себя совокупность установленных на валу конусов, которые вставлены между верхней и нижней панелями. Вал проходит радиально наружу от каждого конуса и устанавливается в стационарное опорное кольцо узла стационарного опорного кольца. На узле стационарного опорного кольца крепится обтекатель вала, так что узел может быть выполнен в форме С-образного разрезного кольца, чтобы облегчить демонтаж при техническом обслуживании.
Еще один вариант системы предотвращения вращения может дополнительно управляться с помощью системы управления, посредством чего азимутальное положение обтекателя вала может активно изменяться при всех траекториях полета. Система предотвращения вращения в целом включает в себя систему регулируемого генератора момента, контроллер, связанный с системой регулируемого генератора момента, и датчик положения обтекателя вала, связанный с контроллером. Система предотвращения вращения может также быть связана с системой управления полетом, чтобы выборочно устанавливать азимутальное положение обтекателя вала относительно корпуса вертолета при всех траекториях полета, чтобы, например, увеличить маневренность летательного аппарата.
Таким образом, согласно настоящему изобретению создана система предотвращения вращения для обтекателя вала, находящегося в окружении совершающих вращательное движение компонентов между обтекателем верхней втулки воздушного винта и обтекателем нижней втулки воздушного винта системы обтекателя втулок соосных воздушных винтов противоположного вращения.
Краткое описание чертежей
Различные признаки и преимущества данного изобретения станут очевидны специалистам в данной области техники из последующего подробного описания предпочтительных в настоящее время вариантов воплощения, приведенного со ссылкой на прилагаемые чертежи, на которых:
Фиг.1А и 1В - общие схематические виды примерного варианта воплощения винтокрылого летательного аппарата, используемого с настоящим изобретением.
Фиг.1С - увеличенный вид с местным сечением системы соосных воздушных винтов противоположного вращения, в которой установлена система обтекателя втулок воздушных винтов согласно настоящему изобретению.
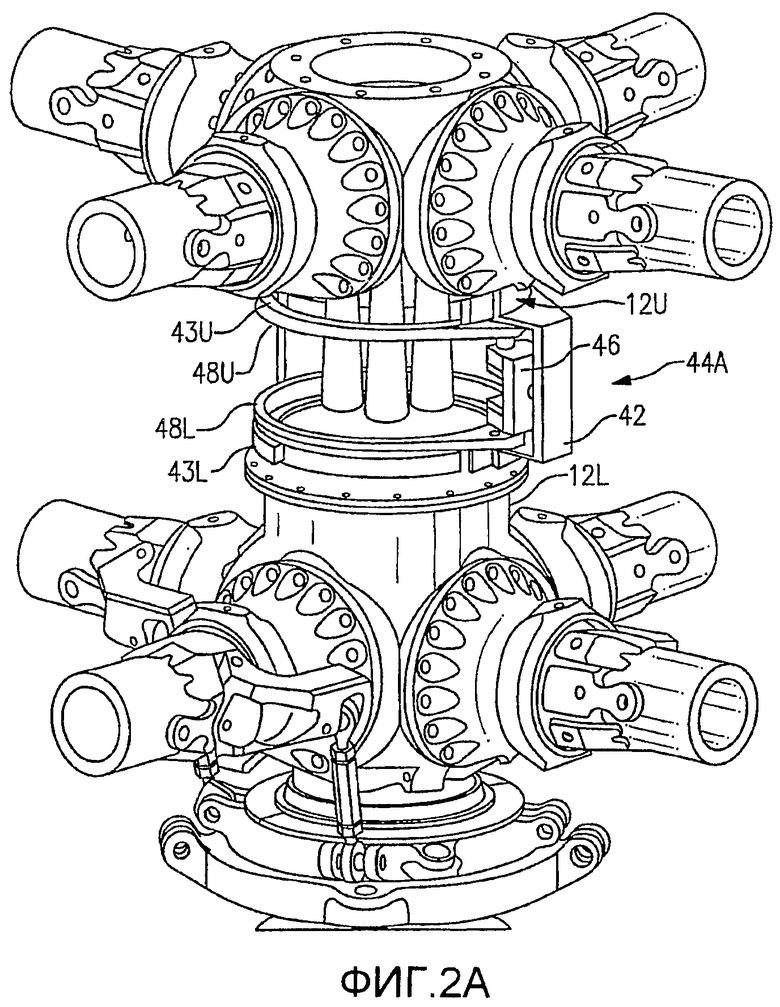
Фиг.2А - вид в перспективе с местным сечением системы соосных воздушных винтов противоположного вращения, иллюстрирующий систему предотвращения вращения, установленную в обтекателе вала.
Фиг.2В - увеличенный вид в разрезе системы предотвращения вращения, представленной на фиг.2А.
Фиг.2С - вид в разрезе системы предотвращения вращения с фиг.2А, взятом по оси вращения системы воздушных винтов.
Фиг.3А - местный вид сбоку в разрезе другого варианта системы предотвращения вращения.
Фиг.3В - увеличенный местный вид сбоку в разрезе системы предотвращения вращения с фиг.3А.
Фиг.3С - вид сбоку в перспективе системы предотвращения вращения с фиг.3А.
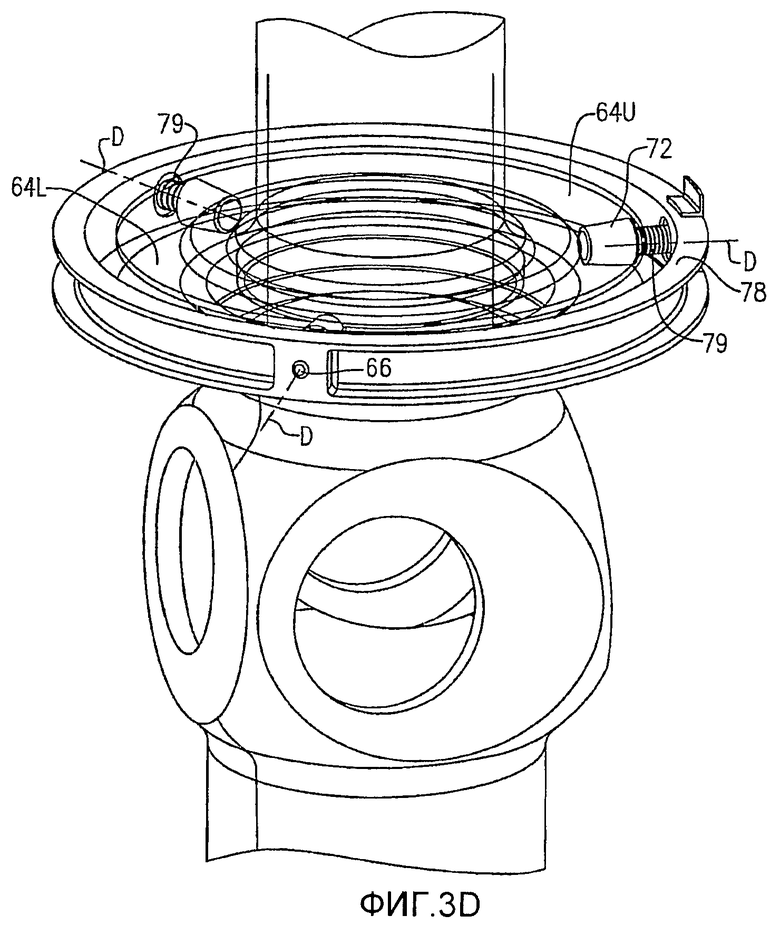
Фиг.3D - местный полупрозрачный вид сбоку в перспективе системы предотвращения вращения с фиг.3А.
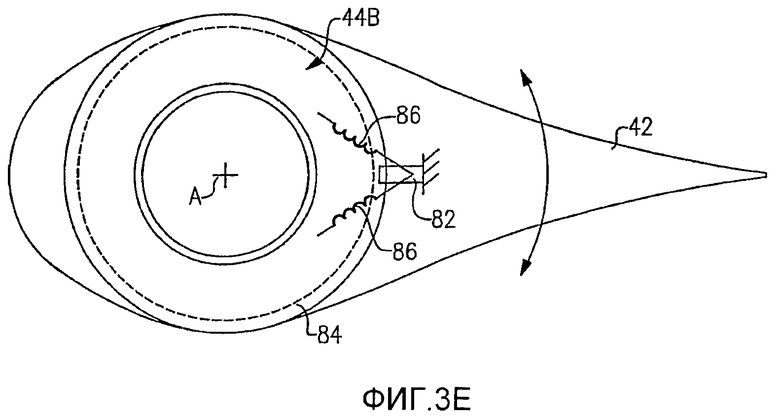
Фиг.3Е - схематический вид сверху системы предотвращения вращения с фиг.3А.
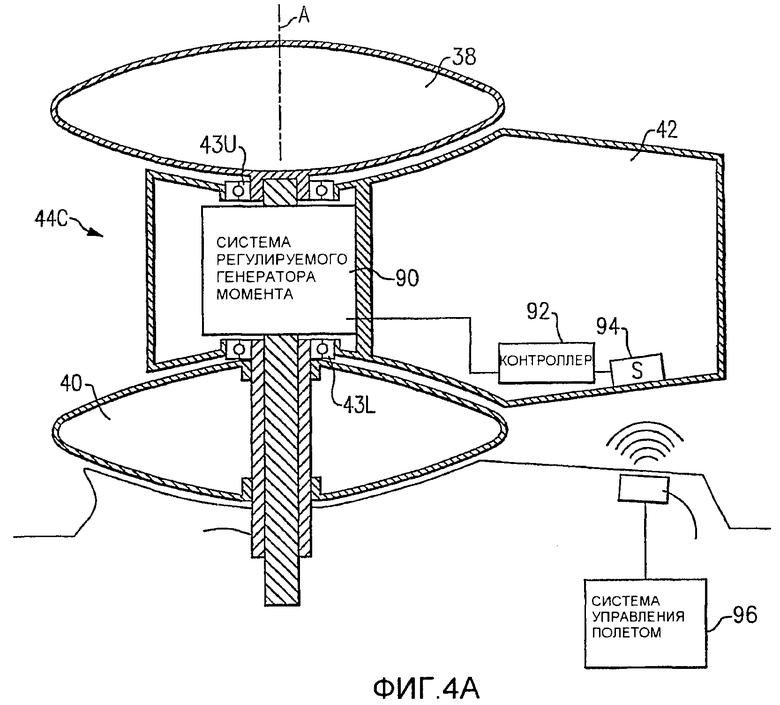
Фиг.4А - схематический вид в разрезе активной системы предотвращения вращения, иллюстрирующий систему регулируемого генератора момента.
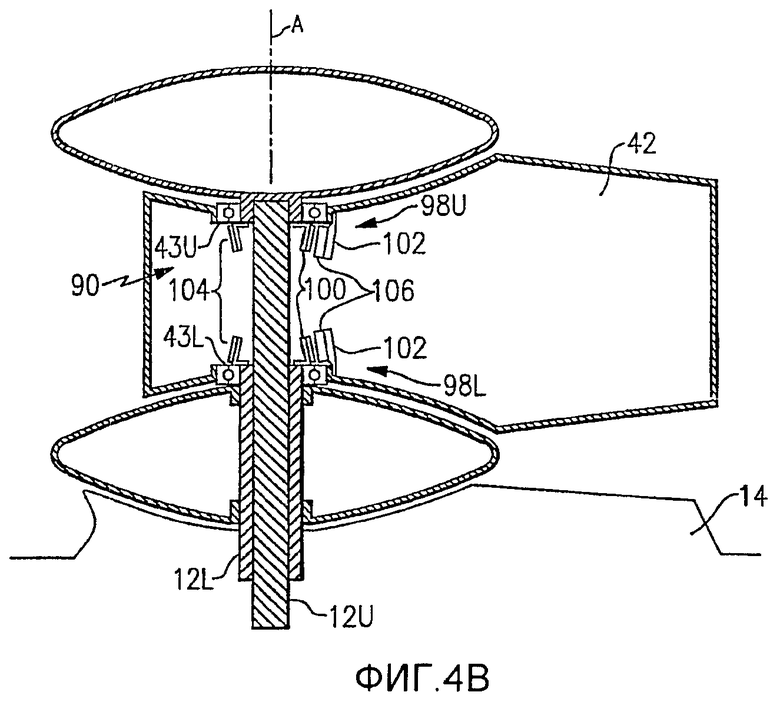
Фиг.4В - частное представление активной системы предотвращения вращения, иллюстрирующей переменную систему генератора вращающего момента.
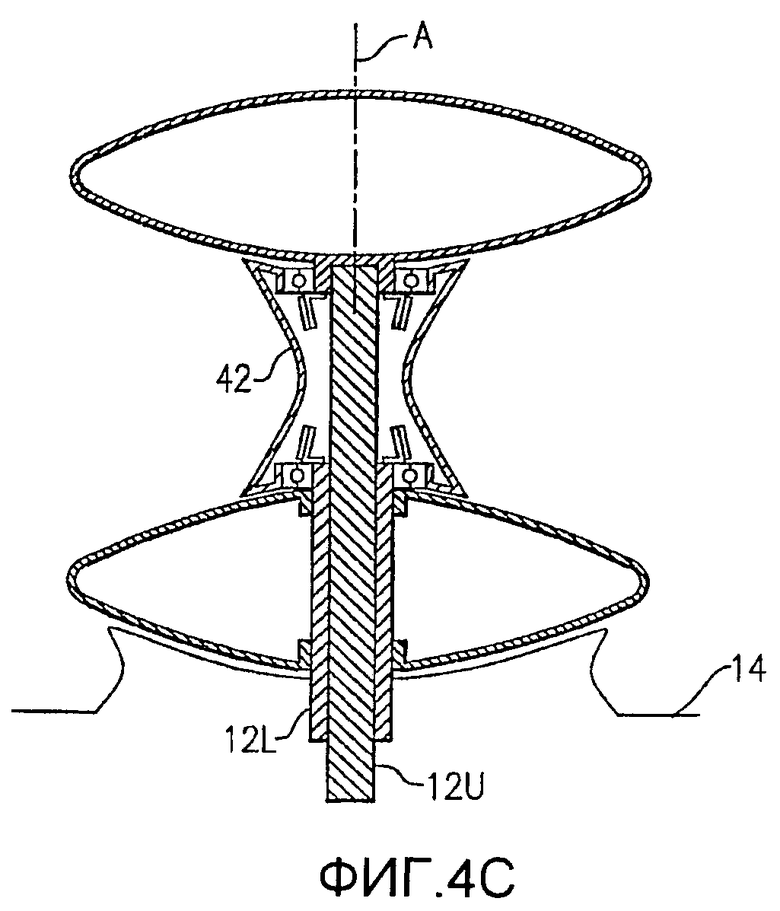
Фиг.4С - вид спереди в разрезе активной системы предотвращения вращения, иллюстрирующий имеющий форму усеченного конуса электромагнитный генератор момента, размещенный внутри имеющего форму песочных часов обтекателя вала.
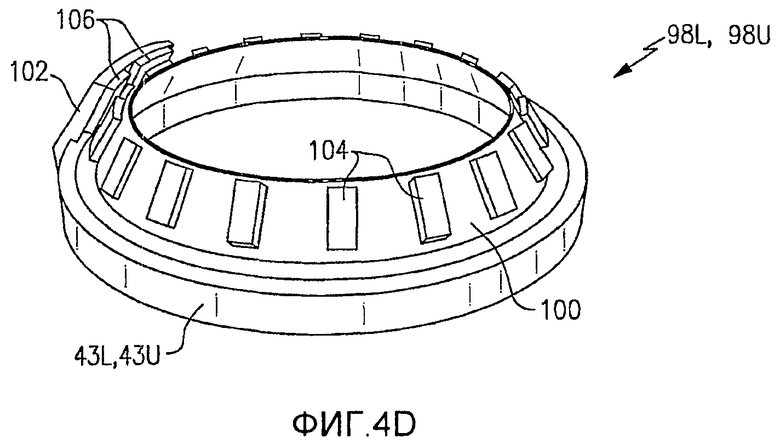
Фиг.4D - местный вид в перспективе одного электромагнитного генератора момента.
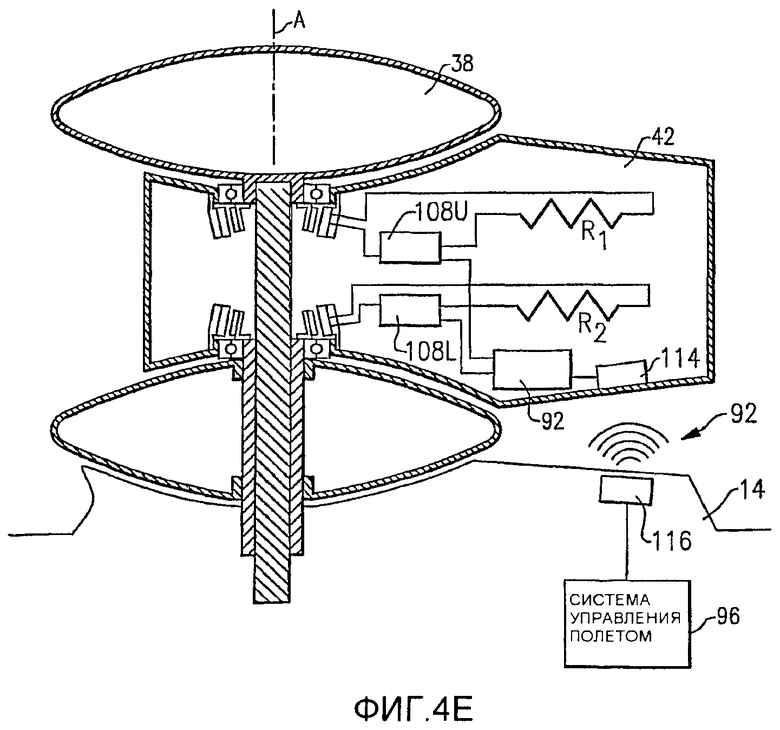
Фиг.4Е - схематический вид системы управления для активной системы предотвращения вращения.
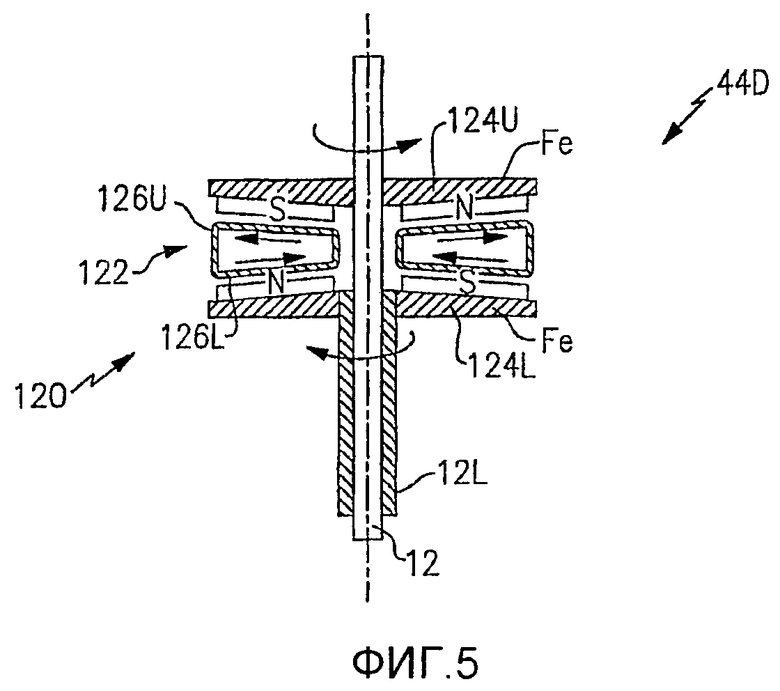
Фиг.5 - схематический вид другого варианта активной системы предотвращения вращения с общим центральным статором.
Подробное описание предпочтительного варианта воплощения изобретения
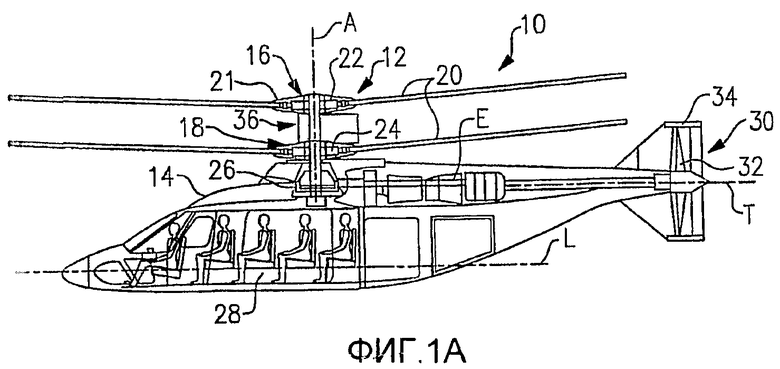
Фиг.1А и 1В иллюстрируют пример винтокрылого летательного аппарата 10 вертикального взлета и посадки, имеющего систему 12 двух соосных воздушных винтов противоположного вращения, которые вращаются вокруг оси вращения А. Летательный аппарат 10 включает в себя корпус 14 летательного аппарата, на котором закреплены система 12 двух соосных воздушных винтов противоположного вращения и дополнительная система 30 поступательного движения, которая обеспечивает поступательное движение, в целом параллельное продольной оси L летательного аппарата. Хотя в описываемом варианте воплощения изобретения проиллюстрирована конкретная конструкция летательного аппарата, настоящее изобретение также применимо для других систем соосных воздушных винтов противоположного вращения.
Система 12 двух соосных воздушных винтов противоположного вращения включает в себя систему 16 верхнего воздушного винта и систему 18 нижнего воздушного винта. Каждая из систем 16, 18 воздушных винтов включает в себя множество лопастей 20 воздушного винта, установленных на втулках 22, 24 воздушных винтов с возможностью вращения вокруг оси вращения А. Ряд основных лопастей 20 воздушного винта выступают по существу радиально наружу от узлов втулок 22, 24 и присоединены к ним любым способом, известным специалистам в данной области техники (соединение схематически обозначено ссылочной позицией 21). Система 12 воздушных винтов может иметь любое количество лопастей 20.
Основная коробка 26 передач, которая может быть расположена над кабиной 28 летательного аппарата, приводит в действие систему 12 воздушных винтов. Система 30 поступательного движения может приводиться в действие посредством той же основной коробки 26 передач, которая приводит в действие систему 12 воздушных винтов. Основная коробка 26 передач приводится в действие посредством одного или нескольких двигателей (схематически обозначены как Е). Как показано на чертеже, коробка 26 передач может быть размещена между газотурбинными двигателями Е, системой 12 воздушных винтов и системой 30 поступательного движения.
Система 30 поступательного движения может быть установлена на задней части корпуса 14, при этом ее ось Т вращения будет ориентирована по существу горизонтально и параллельно продольной оси L летательного аппарата, чтобы обеспечить движение при высокоскоростном полете. Предпочтительно, система 30 поступательного движения включает в себя толкающий воздушный винт 32, установленный внутри аэродинамического обтекателя 34.
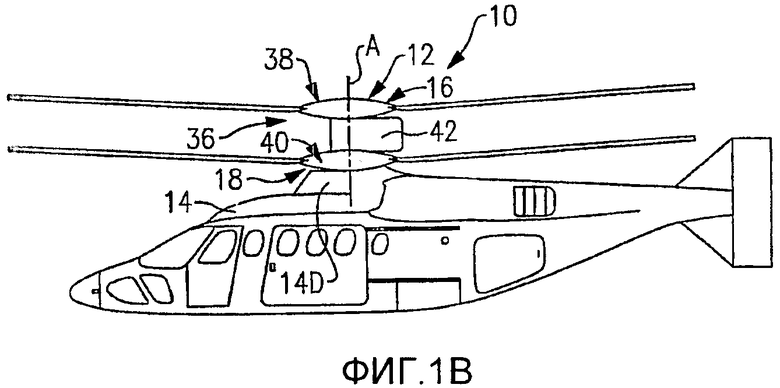
Как показано на фиг.1В, система 12 воздушных винтов включает в себя систему 36 обтекателей втулок воздушных винтов, предпочтительно комплексную систему обтекателей втулок воздушных винтов, в целом расположенную между и вокруг систем 16, 18 верхнего и нижнего воздушных винтов таким образом, что втулки 22, 24 воздушных винтов, по меньшей мере, частично размещены внутри них. Система 36 обтекателей втулок воздушных винтов обеспечивает существенное уменьшение аэродинамического сопротивления, при котором срыв больших масс воздушного потока значительно уменьшен.
Система 36 обтекателей втулок воздушных винтов в целом включает в себя обтекатель 38 верхней втулки, обтекатель 40 нижней втулки и обтекатель 42 вала между ними. Предпочтительно, система 36 обтекателей втулок воздушных винтов является комплексной, чтобы уменьшить эффекты взаимодействия между отдельными обтекателями 38, 40, 42 и избежать излишнего срыва потока в областях соединения. Термин «комплексная», используемый здесь, означает, что форма обтекателя 42 вала в целом соответствует профилям обтекателя 38 верхней втулки и обтекателя 40 нижней втулки на границах между ними. Кроме того, обтекатель 40 нижней втулки предпочтительно сопряжен с корпусом 14 летательного аппарата в области, обычно обозначаемой на винтокрылом летательном аппарате как пилон 14D. Следует отметить, что системы обтекателей различной конструкции могут использоваться вместе с настоящим изобретением. Для большего понимания других аспектов системы обтекателей втулки воздушных винтов и связанных с ними компонентов, может служить заявка на патент США номер 11/141,246, поданная 31 мая 2005 г., которая переуступлена патентообладателю рассматриваемого здесь изобретения, и содержание которой полностью включено сюда посредством ссылки.
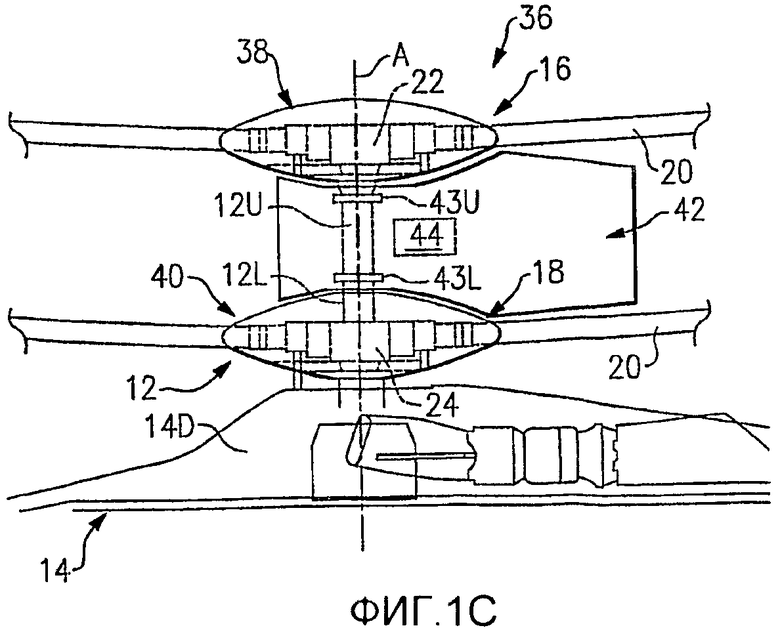
Как показано на фиг.1С, обтекатель 42 вала предпочтительно крепится в системе 12 соосных воздушных винтов противоположного вращения с помощью подшипникового узла 43U, 43L (показан схематично) таким образом, что относительное угловое положение обтекателя 42 вала вокруг оси вращения А относительно корпуса 14 может регулироваться с помощью системы 44 предотвращения вращения. Верхний подшипник 43U и нижний подшипник 43L могут быть расположены соответственно рядом с верхней частью и рядом с нижней частью обтекателя 42 вала. Верхний подшипник 43U предпочтительно закреплен на валу 12U одного воздушного винта, тогда как нижний подшипник 43L закреплен на валу 12L другого воздушного винта, так что подшипники вращаются в противоположных направлениях, и суммарное сопротивление опор относительно мало.
Система 44 предотвращения вращения управляет положением обтекателя 42 вала вокруг оси вращения А таким образом, чтобы предотвратить свободное вращение 42 вала синхронно с любым из валов 12U, 12L, которое может произойти во время некоторых режимов полета. Хотя настоящее изобретение описано со ссылкой на конкретный вариант воплощения вертолета, следует понимать, что настоящее изобретение может быть применено в других областях техники, в которых требуется стационарная установка среди окружающих вращающихся компонентов.
Как показано на фиг.2А, система 44А предотвращения вращения включает в себя зубчатую передачу 46, чтобы, по меньшей мере, частично свести к нулю вращение обтекателя 42 вала, которое может произойти из-за паразитного трения подшипникового узла 43U, 43L. С зубчатой передачей 46 взаимодействуют верхний ремень 48U и нижний ремень 48L, которые приводятся в движение в одинаковых, но противоположных направлениях вокруг оси вращения. Верхний ремень 48U вращается вместе с валом 12U воздушного винта, так как верхний ремень 48U взаимодействует с приводным элементом 50U верхнего ремня, закрепленным так, чтобы вращаться вместе с валом 12U воздушного винта.
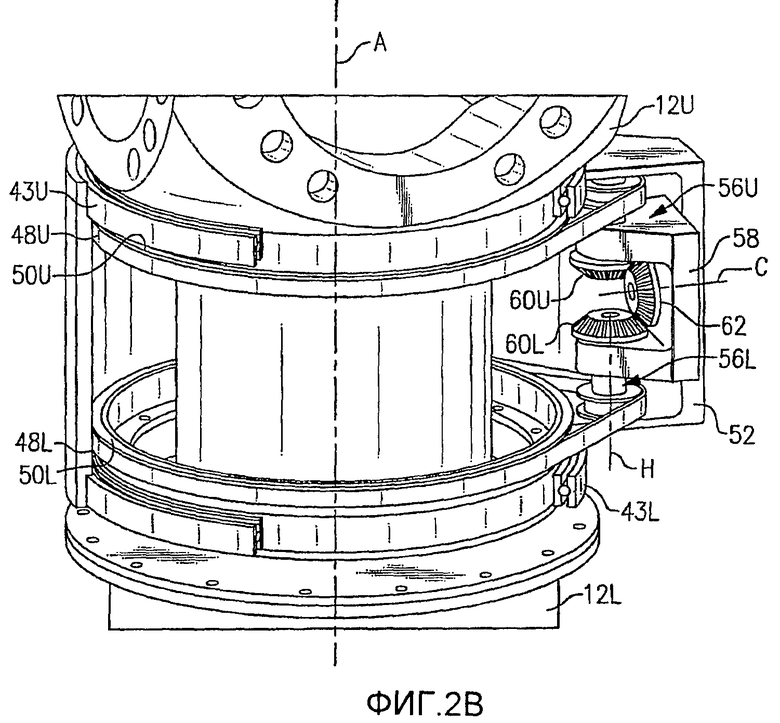
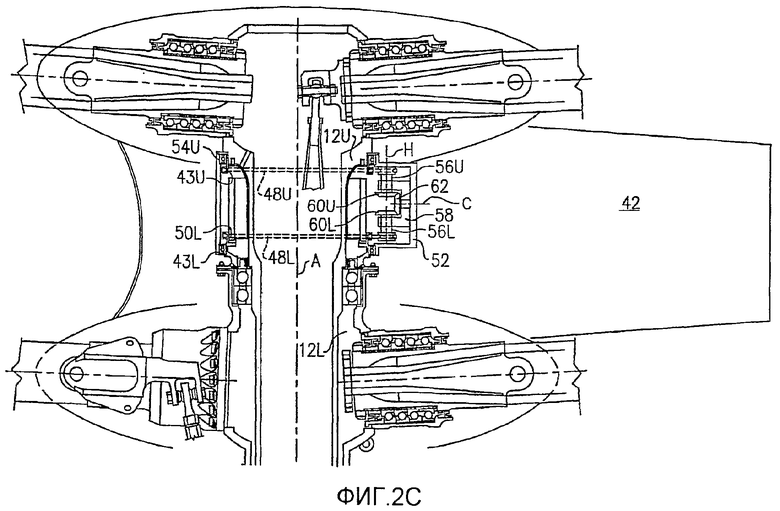
Как показано на фиг.2В, нижний ремень 48L вращается вместе с валом 12L воздушного винта, так как нижний ремень 48L взаимодействует с приводным элементом 50L, закрепленным таким образом, чтобы вращаться вместе с валом 12L воздушного винта. Предпочтительно, верхний ремень 48U и нижний ремень 48L представляют собой клиновые ремни или зубчатые ремни, однако также могут использоваться и другие элементы. Кроме того, следует понимать, что хотя здесь используется термин «ремень», могут быть использованы и другие подобные элементы.
Зубчатая передача 46 установлена внутри корпуса 52, расположенного внутри обтекателя 42 вала. Корпус 52 предпочтительно прикреплен к внутренней стороне обтекателя 42 вала, так что по существу неподвижный корпус 52 удерживает обтекатель 42 вала по существу неподвижным относительно корпуса 10 летательного аппарата. Корпус 52 предпочтительно прикреплен к системе 12 соосных воздушных винтов противоположного вращения через подшипниковый узел 43U, 43L (см. фиг.2С) таким образом, что корпус 52 вращается вместе с обтекателем 42 вала вокруг оси вращения А. Верхний подшипник 43U и нижний подшипник 43L соответственно расположены рядом с верхней частью и рядом с нижней частью корпуса 52. Верхний подшипник 43U прикреплен к валу 12U одного воздушного винта, тогда как нижний подшипник 43L прикреплен к валу 12L другого воздушного винта, так что подшипники вращаются в противоположных направлениях и суммарное сопротивление подшипников относительно мало.
Зубчатая передача 46 предпочтительно включает в себя верхний и нижний установленные на валу шкивы 56U, 56L, которые вращаются вокруг оси вращения Н. Валы верхнего и нижнего шкивов 56U, 56L установлены в раме 58. На другом конце валов верхнего и нижнего шкивов 56U, 56L установлены соответствующие конические шестерни 60U, 60L. Конические шестерни 60U, 60L находятся в зацеплении с общей паразитной шестерней 62. Общая паразитная шестерня 62 вращается вокруг оси вращения С, которая перпендикулярна оси вращения Н. Благодаря тому что обе конические шестерни 60U, 60L имеют одинаковое количество зубьев, общая паразитная шестерня 62 вращается вокруг оси С, причем она удерживается в азимутальном положении относительно оси вращения А, так что обтекатель 42 вала удерживается в азимутальном положении относительно летательного аппарата 10.
Так как система 44А предотвращения вращения имеет ременный привод, она самостоятельно регулируется всякий раз, когда летательный аппарат достигает скорости прямолинейного горизонтального полета, при которой сила, приложенная воздушным потоком, превышает силу трения между ремнями 48U и шкивами 56U, 56L. То есть, если обтекатель 42 вала изменит свое положение, скорость прямолинейного горизонтального полета, при которой сила, приложенная воздушным потоком, больше, чем сила трения между ремнями 48U и шкивами 56U, 56L, вновь расположит обтекатель 42 вала вдоль продольной оси летательного аппарата 10. Это позволяет системе 42 предотвращения вращения быть сконструированной для более низких нагрузок и тем самым обеспечивает получение облегченной системы.
Кроме того, следует понимать, что сила трения может быть сделана относительно небольшой, такой, что даже низкоскоростное маневрирование, такое как, например, боковое скольжение, выше предварительно заданной величины скорости, будет также выравнивать обтекатель 42 вала вдоль направления ветра.
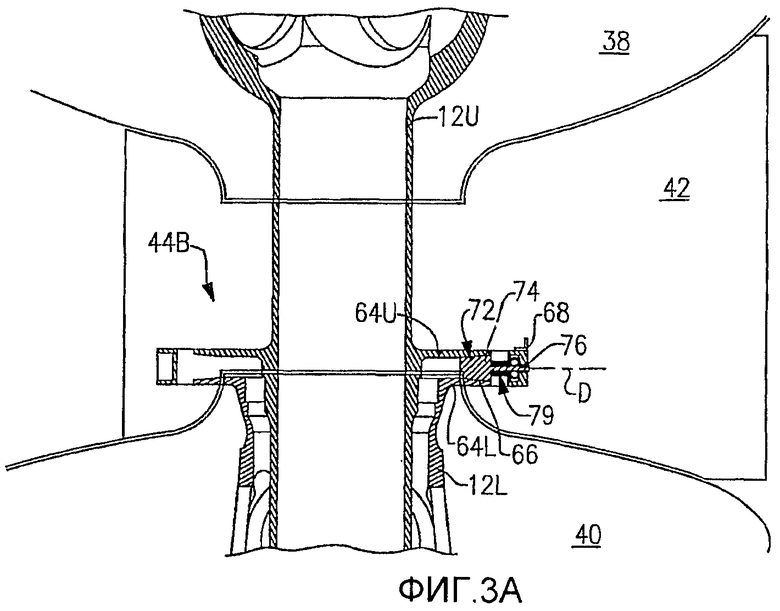
На фиг.3А показан другой вариант системы предотвращения вращения. Представленная система 44В предотвращения вращения, по меньшей мере, частично сводит к нулю вращение обтекателя 42 вала, которое может произойти вследствие паразитного трения подшипникового узла 43U, 43L. Система 44В предотвращения вращения в целом включает в себя верхнюю панель 64U, нижнюю панель 64L, узел 66 приводного конуса и узел 68 стационарного опорного кольца.
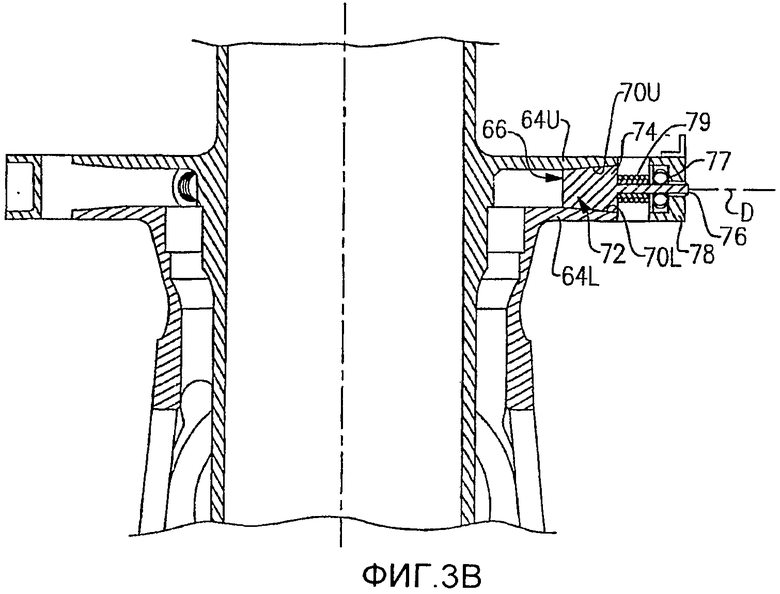
Верхняя панель 64U вращается вместе с валом 12U воздушного винта, так как верхняя панель 64U закреплена таким образом, чтобы вращаться вместе с валом 12U воздушного винта. Нижняя панель 64L вращается вместе с валом 12Д воздушного винта, так как нижняя панель 64L закреплена таким образом, чтобы вращаться вместе с валом 12L воздушного винта. Верхняя панель 64U и нижняя панель 64L являются концентрическими относительно оси вращения А, и каждая включает в себя соответствующую наклонную поверхность 70U, 70L, которая обращена к противоположной наклонной поверхности 70L, 70U (см. фиг.3В).
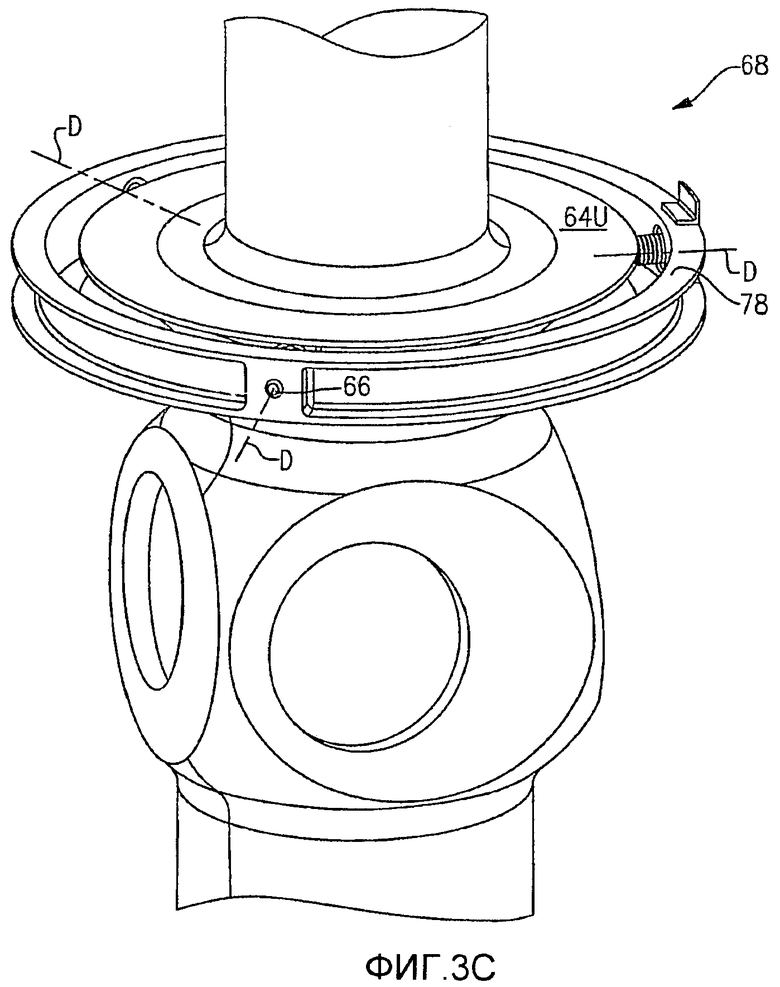
Узел 66 приводного конуса включает в себя совокупность установленных на валу конусов 72 (см. фиг.3С и 3D). То есть, каждый установленный на валу конус 72 включает в себя имеющий форму усеченного конуса элемент 74, который сопрягается с наклонными поверхностями 70U, 70L и вставлен между ними. Конусы 72 предпочтительно имеют наружную эластомерную поверхность с высоким коэффициентом трения, в то время как наклонные поверхности 70U, 70L включают в себя шероховатую контактную поверхность, обеспечивающую высокий коэффициент трения.
Хотя фрикционная передача обеспечивается эластомером, наложенным на конус 72, и шероховатой сопрягаемой поверхностью наклонных поверхностей 70U, 70L, следует понимать, что эластомерное покрытие может быть, как вариант, наложено на наклонные поверхности 70U, 70L, и конусы 72 могли быть обработаны с получением на них шероховатой поверхности. Кроме того, следует понимать, что различные материалы, обеспечивающие передачу движения посредством трения, и поверхности контакта между ними, могут альтернативно или дополнительно использоваться в настоящем изобретении. Кроме того, несмотря на то, что в настоящем изобретении описано использование фрикционной передачи, вследствие ее небольшого веса, легкости в изготовлении и требования низкой нагрузки, следует понимать, что зубчатая передача, такая как, например, зубчатая передача с использованием конических шестерен, или зубчатая передача с использованием плоских шестерен, может альтернативно быть применена вместо фрикционной передачи для тех областей применения, которые требуют более высоких допустимых нагрузок.
Вал 76 проходит радиально наружу от каждого конуса 72 и устанавливается в стационарное опорное кольцо 78 узла 68 стационарного опорного кольца с возможностью вращения вокруг оси вращения D.
Узел 78 стационарного опорного кольца предпочтительно выполнен в форме С-образного разрезного кольца (см. фиг.3С), чтобы облегчить демонтаж при техническом обслуживании. Узел 78 стационарного опорного кольца предпочтительно включает в себя подшипник 77 приводного конуса (см. фиг.3С), в котором устанавливается вал 76, чтобы облегчить вращение и регулировку положения каждого установленного на валу конуса 72 вокруг соответствующей оси вращения D. Элемент 79 смещения конуса (см. фиг.3D), такой как, например, цилиндрическая пружина, предпочтительно размещен между вращающимся кольцом подшипника 77 приводного конуса и внешней вертикальной поверхностью конуса 72 для предварительного прижатия конуса 72 к приводным панелям 64U, 64L.
Узел 66 приводного конуса и приводные панели 64U, 64L имеют такие размер и конфигурацию, что вращение вала 12L воздушного винта заставляет конусы узла 66 приводного конуса вращаться относительно соответствующих осей D (см. фиг.3С); однако благодаря тому, что вал 12U воздушного винта вращается по существу с той же скоростью, что и вал 12L воздушного винта, но в противоположном направлении, азимутальное положение каждого установленного на валу конуса 72 остается по существу неизменным относительно корпуса 10 летательного аппарата. То есть, так как каждый установленный на валу конус 72 может свободно вращаться в плоскости вокруг соответствующей ему оси D, но по существу защищен от азимутального перемещения относительно оси вращения А вала воздушного винта, узел 68 опорного кольца, который прикреплен к нему, является по существу неподвижным относительно корпуса 10 летательного аппарата (см. фиг.3А).
Обтекатель 42 вала установлен в узел 68 стационарного опорного кольца таким образом, что обтекатель 68 вала остается по существу неподвижным относительно корпуса 10 летательного аппарата. То есть, синхронное вращение обтекателя 42 вала с валом воздушного винта предотвращается путем крепления обтекателя 42 вала к узлу 68 стационарного опорного кольца.
Обтекатель вала предпочтительно установлен в узле 68 стационарного опорного кольца с помощью узла 80 смещения (см. фиг.3Е). Узел 80 смещения предпочтительно представляет собой центрирующий элемент 82, прикрепленный к обтекателю 42 вала и расположенный внутри кольцевой канавки 84 стационарного опорного кольца 78 таким образом, что обтекатель 42 вала может вращаться вокруг стационарного опорного кольца 78, и это вращение ограничено центрирующими пружинами 86, расположенными между стационарным опорным кольцом 78 и обтекателем 42 вала. Следует понимать, что центрирующий элемент 82 может иметь различные формы, которые по существу ограничивают внешнее кольцо подшипника относительно стационарного опорного кольца 78. Узел 80 смещения позволяет, по меньшей мере, частично регулировать положение обтекателя 42 вала относительно воздушного потока при боковом полете, уменьшая нагрузки на систему 44В предотвращения вращения, удерживая при этом обтекатель 42 вала в центральном положении во время зависания.
На фиг.4А показан еще один вариант системы предотвращения вращения. Система 44С предотвращения вращения, по меньшей мере, частично сводит к нулю вращение обтекателя 42 вала, которое может произойти из-за паразитного трения подшипникового узла 43U, 43L. Система 44С предотвращения вращения, дополнительно к предотвращению вращения обтекателя вала, как описано выше, может управляться системой управления, с помощью которой азимутальное положение обтекателя 42 вала может активно изменяться при всех траекториях полета.
Система 44С предотвращения вращения включает в себя систему 90 регулируемого генератора момента, контроллер 92, связанный с системой 90 регулируемого генератора момента, и датчик 94 положения обтекателя вала, связанный с контроллером 92. Система 44С предотвращения вращения предпочтительно связана с системой 96 управления полетом, чтобы избирательно регулировать азимутальное положение обтекателя 42 вала относительно корпуса 14 летательного аппарата при всех траекториях полета.
Как показано на фиг.4В, система 90 регулируемого генератора момента предпочтительно включает в себя верхний электромагнитный генератор 98U момента для вала 12U воздушного винта и нижний электромагнитный генератор 98L момента для вала 12L воздушного винта. Каждый из электромагнитных генераторов 98U, 98L момента может быть выполнен с заданной величиной конусности для того, чтобы соответствовать геометрическим параметрам обтекателя вала, который имеет форму «горлышка» или «песочных часов» (см. фиг.4С). Каждый электромагнитный генератор 98U, 98L момента установлен в соответствующий подшипниковый узел 43U, 43L. Подшипниковый узел 43U, 43L является предпочтительным для установки электромагнитного генератора, вследствие внутреннего запаса прочности и точной механической обработки, типичных для конструкции подшипника.
Каждый из электромагнитных генераторов 98U, 98L момента включает в себя внутреннюю несущую конструкцию 100, которая вращается относительно вала 12U, 12L воздушного винта, и внешнюю несущую конструкцию 102, которая крепится к обтекателю 42 вала, так что внутренняя несущая конструкция 100 вращается относительно внешней несущей поверхности 102. На каждой внутренней несущей поверхности 100 закреплено множество постоянных магнитов 104, которые расположены по окружности (см. фиг.4D). На внешней несущей конструкции 102 закреплена конструкция 106 электромагнитного статора, которая включает в себя одну или несколько катушек, которые воспринимают возбуждение магнитного поля, создаваемое относительным вращением между постоянными магнитами 104 и конструкцией 106 электромагнитного статора. Магнитный градиент, формируемый между постоянными магнитами 104 и конструкцией 106 электромагнитного статора, действует так, чтобы избирательно создать момент на обтекателе 42 вала. Магнитный градиент пропорционален электрическому току, протекающему через конструкцию 106 электромагнитного статора, так что градиентом можно быстро и точно управлять путем управления протекающим током.
Как показано на фиг.4Е, каждый электромагнитный генератор 98U, 98L момента электрически связан с соответствующими верхним и нижним регуляторами 108U, 108L тока, которые связаны с контроллером 92. Контроллер 92 включает в себя логический блок для управления обтекателем 42 вала. Система 92 управления предпочтительно связана с системой 96 управления полетом (показана схематично), чтобы выдавать команды верхнему регулятору 108U тока и нижнему регулятору 108L тока.
Система 92 управления электрически связана с датчиком 114 азимутального положения, расположенным внутри обтекателя 42 вала. Датчик 114 азимутального положения предпочтительно имеет беспроводную связь с соответствующим передатчиком 116, расположенным в корпусе 14 летательного аппарата. Датчик 114 и передатчик 116 предпочтительно обеспечивают формирование сигнала, пропорционального рассогласованию между ними. Сигнал может предпочтительно быть по существу монотонным с угловым смещением обтекателя 42 вала, так что смещение из заданного относительного положения в первом направлении является положительным, тогда как смещение в противоположном направлении - отрицательным. Сигнал, передаваемый передатчиком 116, может представлять собой, например, поле высокочастотной электромагнитной волны, пространственно изменяющееся по амплитуде (и предпочтительно по амплитуде и частоте), чтобы получить пространственные изменения, требуемые для датчика 114 формирования монотонного сигнала. Следует понимать, что понятие «поле электромагнитной волны» может включать в себя различные поля, включая световое поле, так что оптический датчик (включающий в себя оптический датчик, наблюдающий предварительно выбранный рисунок, нанесенный непосредственно на фюзеляж) мог бы быть использован с настоящим изобретением. Более предпочтительно, часть тока, генерируемого электромагнитным генератором 98U, 98L момента, может быть использована для питания энергией системы 108 управления.
Во время работы система 92 управления может избирательно распределять электрическую энергию, выдаваемую одним из электромагнитных генераторов 98U, 98L момента, через соответствующий резистивный элемент R1, R2 таким образом, что между электромагнитными генераторами 98U, 98L момента создается разностная сила магнитного градиента. То есть, резистивные элементы R1, R2 избирательно поглощают часть силы магнитного градиента, выдаваемой соответствующими электромагнитными генераторами 98U, 98L момента.
Разностная сила магнитного градиента заставляет обтекатель 42 вала вращаться вместе с тем из электромагнитных генераторов 98U, 98L, который формирует относительно большую силу. То есть, различие моментов, генерируемых верхним и нижним электромагнитными генераторами 98U, 98L момента, имеет результатом суммарный момент, который заставляет вращаться обтекатель 42 вала вокруг оси вращения А. Система 92 управления включает в себя логический блок для управления обтекателем 42 вала и подает управляющий сигнал на верхний регулятор 108U тока и нижний регулятор 108L тока в ответ на сигнал, генерируемый датчиком 114.
На фиг.5 показан еще один вариант системы предотвращения вращения. Данная система 44D предотвращения вращения включает в себя единственный электромагнитный генератор 120 момента с общим центральным статором 122 между верхним диском 124U электромагнитного ротора и нижним диском 124L электромагнитного ротора. Электрический ток через верхний слой 126U и нижний слой 126L общего центрального статора 122 течет в противоположных направлениях, так что генерируемые электромагнитные моменты действуют на верхний диск 124U электромагнитного ротора и нижний диск 124L электромагнитного ротора также в противоположных направлениях. Так как в данном случае требуется только один регулятор тока, в итоге получается относительно менее сложная система.
Следует понимать, что термины, относящиеся к относительному положению, такие как «передний», «задний», «верхний», «нижний», «выше», «ниже» и т.п. связаны с положением конструкции в пространстве, показанным на чертежах, и не должны рассматриваться как какое-либо ограничение.
Кроме того, следует понимать, что хотя конкретное взаимное расположение компонентов было описано в проиллюстрированных вариантах воплощения, рассматриваемое здесь изобретение применимо для других вариантов размещения.
Хотя показаны, описаны и сформулированы конкретные последовательности этапов, следует отметить, что этапы могут быть выполнены в любом порядке, отдельно или вместе, если иное не указано, и настоящее изобретение при этом будет все еще полезным.
Вышеизложенное описание является примерным, а не ограничивающим. Очевидно, что с учетом приведенных выше идей возможны различные модификации и изменения настоящего изобретения. Хотя были описаны предпочтительные варианты воплощения изобретения, специалисту в данной области техники будет также очевидно, что в пределах объема данного изобретения находятся определенные различные модификации. Поэтому необходимо понимать, что в пределах объема прилагаемой формулы изобретения, изобретение может быть осуществлено иным образом, чем это было описано. Исходя из этого, объем и идея настоящего изобретения определены только лишь прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБТЕКАТЕЛЕЙ ВТУЛОК НЕСУЩИХ ВИНТОВ ДЛЯ СИСТЕМЫ СООСНЫХ НЕСУЩИХ ВИНТОВ ПРОТИВОВРАЩЕНИЯ | 2006 |
|
RU2397110C2 |
| СИСТЕМА ВОЗДУШНЫХ ВИНТОВ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ С УСТРОЙСТВОМ ФЛЮГИРОВАНИЯ ИХ ЛОПАСТЕЙ | 2009 |
|
RU2488520C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ЛЕГЧЕ ВОЗДУХА | 1994 |
|
RU2126341C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2017 |
|
RU2724940C2 |
| ОБЪЕДИНЕННЫЙ ОПОРНЫЙ ПОДУЗЕЛ УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2113378C1 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
| ВОЗДУХОЗАБОРНИК ГАЗОТУРБИННОГО ДВИГАТЕЛЯ В ГОНДОЛЕ | 2010 |
|
RU2538350C2 |
| ВОЗДУШНЫЙ ВИНТ С АВТОМАТИЧЕСКИ РАСКЛАДЫВАЮЩИМИСЯ И ПОВОРОТНЫМИ ЛОПАСТЯМИ | 2010 |
|
RU2456206C2 |
Изобретения относятся к системе обтекателей втулок воздушных винтов винтокрылого летательного аппарата, в частности к системе предотвращения вращения, которая удерживает от вращения обтекатель вала. Система обтекателя по первому варианту содержит обтекатель вала, установленный с возможностью вращения вокруг оси вращения, и систему предотвращения вращения, установленную на обтекателе вала. Система обтекателя по второму варианту содержит обтекатель верхней втулки, обтекатель нижней втулки, обтекатель вала и пассивную систему предотвращения вращения, установленную на обтекатель вала, чтобы минимизировать неуправляемое вращение обтекателя вала вокруг оси вращения. Система обтекателя по третьему варианту содержит обтекатель верхней втулки, обтекатель нижней втулки, обтекатель вала и активную систему предотвращения вращения, установленную на обтекателе вала, чтобы регулировать азимутальное положение обтекателя вала вокруг оси вращения. Достигается уменьшение сопротивления обтекателя вала. 3 н. и 20 з.п. ф-лы, 17 ил.
1. Система обтекателя, содержащая обтекатель вала, установленный с возможностью вращения вокруг оси вращения; и систему предотвращения вращения, установленную на обтекателе вала, для управления вращением обтекателя вала вокруг оси вращения.
2. Система по п.1, дополнительно содержащая обтекатель верхней втулки, сформированный вокруг оси; и обтекатель нижней втулки, сформированный вокруг оси, причем обтекатель вала установлен с возможностью относительного перемещения между обтекателем верхней втулки и обтекателем нижней втулки.
3. Система по п.1, в которой система предотвращения вращения содержит корпус, установленный на обтекателе вала; зубчатую передачу, установленную в корпусе; верхний ремень, взаимодействующий с зубчатой передачей и верхним приводным элементом, который вращается вокруг оси вращения; и нижний ремень, взаимодействующий с зубчатой передачей и нижним приводным элементом, который вращается вокруг оси вращения в направлении, противоположном направлению вращения верхнего приводного элемента.
4. Система по п.3, в которой зубчатая передача дополнительно содержит верхний шкив, взаимодействующий с верхним ремнем; верхнюю шестерню, установленную с возможностью вращения вместе с верхним шкивом; нижний шкив, взаимодействующий с нижним ремнем; нижнюю шестерню, установленную с возможностью вращения вместе с нижним шкивом; и паразитную шестерню, находящуюся в зацеплении с верхней шестерней и нижней шестерней.
5. Система по п.4, в которой верхний шкив и нижний шкив установлены с возможностью вращения вокруг первой оси вращения зубчатой передачи, в основном параллельной оси вращения, причем паразитная шестерня сформирована вокруг второй оси вращения зубчатой передачи, в основном перпендикулярной первой оси вращения зубчатой передачи.
6. Система по п.4, в которой верхний ремень взаимодействует с верхним шкивом и верхним приводным элементом, а нижний ремень взаимодействует с нижним шкивом и нижним приводным элементом посредством силы трения, которая обеспечивает самостоятельное регулирование положения обтекателя вала, когда скорость полета превышает заданную скорость.
7. Система по п.1, в которой система предотвращения вращения содержит верхнюю панель, которая вращается вокруг оси вращения; нижнюю панель, которая вращается вокруг оси вращения в направлении, противоположном верхнему приводному элементу; узел приводного конуса, взаимодействующий с верхней панелью и нижней панелью; и узел стационарного опорного кольца, установленный на узле приводного конуса, причем обтекатель вала установлен на узле стационарного опорного кольца.
8. Система по п.7, в которой верхняя приводная панель включает в себя наклонную поверхность, а нижняя приводная панель включает в себя наклонную поверхность, которая обращена к наклонной поверхности верхней приводной панели.
9. Система по п.8, в которой каждая наклонная поверхность включает в себя шероховатую поверхность.
10. Система по п.8, в которой узел верхнего приводного конуса включает в себя множество установленных на валу конусов, каждый из которых расположен между наклонными поверхностями и взаимодействует с ними.
11. Система по п.10, в которой каждый из конусов включает в себя эластомерную поверхность.
12. Система по п.10, в которой вал каждого из установленных на валу конусов размещен в узле стационарного опорного кольца вдоль оси, в основном перпендикулярной оси вращения.
13. Система по п.10, в которой вал каждого из установленных на валу конусов размещен в подшипнике, установленном в узле стационарного опорного кольца.
14. Система по п.1, в которой система предотвращения вращения содержит систему регулируемого генератора момента, имеющую внутреннюю несущую конструкцию, которая вращается вокруг оси вращения, и внешнюю несущую конструкцию, которая установлена на обтекателе вала; систему датчиков, которая отслеживает положение обтекателя вала; и контроллер, связанный с системой регулируемого генератора момента и системой датчиков, причем контроллер выполнен с возможностью управления системой регулируемого генератора момента под влиянием системы датчиков, чтобы позиционировать обтекатель вала относительно оси вращения.
15. Система по п.14, в которой система регулируемого генератора момента содержит электромагнитный генератор момента, который вращается вокруг оси вращения.
16. Система по п.14, в которой система регулируемого генератора момента содержит верхний электромагнитный генератор момента, который вращается вокруг оси вращения; нижний электромагнитный генератор момента, который вращается вокруг оси вращения в направлении, противоположном направлению вращения верхнего электромагнитного генератора момента.
17. Система по п.14, в которой система регулируемого генератора момента установлена в подшипнике.
18. Система обтекателя втулок воздушных винтов для системы соосных воздушных винтов противоположного вращения, содержащая обтекатель верхней втулки, сформированный вокруг оси вращения воздушного винта; обтекатель нижней втулки, сформированный вокруг оси вращения; обтекатель вала, установленный между обтекателем верхней втулки и обтекателем нижней втулки с возможностью вращения вокруг оси вращения воздушного винта; пассивную систему предотвращения вращения, установленную на обтекатель вала, чтобы минимизировать неуправляемое вращение обтекателя вала вокруг оси вращения.
19. Система по п.18, в которой система предотвращения вращения содержит корпус, установленный на обтекатель вала; верхний ремень, взаимодействующий с зубчатой передачей и верхним приводным элементом, который вращается вокруг оси вращения; нижний ремень, взаимодействующий с зубчатой передачей и нижним приводным элементом, который вращается вокруг оси вращения в направлении, противоположном направлению вращения верхнего приводного элемента; верхний шкив, установленный с возможностью вращения относительно корпуса, причем верхний шкив взаимодействует с верхним ремнем; верхнюю шестерню, установленную с возможностью вращения вместе с верхним шкивом; нижний шкив, установленный с возможностью вращения относительно корпуса, причем нижний шкив взаимодействует с нижним ремнем; нижнюю шестерню, установленную с возможностью вращения вместе с нижним шкивом; и паразитную шестерню, установленную с возможностью вращения относительно корпуса, причем паразитная шестерня находится в зацеплении с верхней шестерней и нижней шестерней.
20. Система по п.18, в которой система предотвращения вращения содержит верхнюю панель, которая вращается вокруг оси вращения; нижнюю панель, которая вращается вокруг оси вращения в направлении, противоположном направлению вращения верхнего приводного элемента; узел приводного конуса, взаимодействующий с верхней панелью и нижней панелью; узел стационарного опорного кольца, установленный на узел приводного конуса, причем обтекатель вала установлен на узле стационарного опорного кольца.
21. Система обтекателя втулок воздушных винтов для системы соосных воздушных винтов противоположного вращения, содержащая обтекатель верхней втулки, сформированный вокруг оси вращения воздушного винта; обтекатель нижней втулки, сформированный вокруг оси вращения; обтекатель вала, установленный между обтекателем верхней втулки и обтекателем нижней втулки с возможностью вращения вокруг оси вращения воздушного винта; активную систему предотвращения вращения, установленную на обтекателе вала, чтобы регулировать азимутальное положение обтекателя вала вокруг оси вращения.
22. Система по п.21, в которой система предотвращения вращения содержит систему регулируемого генератора момента, имеющую внутреннюю несущую конструкцию, которая установлена на внутреннее кольцо подшипника, в котором установлена система воздушных винтов, причем внутренняя несущая конструкция выполнена с возможностью вращения вокруг оси вращения основного воздушного винта вместе с системой воздушных винтов, и внешнюю несущую конструкцию, установленную на внешнем кольце подшипника и обтекателе вала; систему датчиков, которая отслеживает положение обтекателя вала; и контроллер, связанный с системой регулируемого генератора момента и системой датчиков, причем контроллер выполнен с возможностью управления системой регулируемого генератора момента под влиянием системы датчиков, чтобы регулировать положение обтекателя вала вокруг оси вращения основного воздушного винта.
23. Система по п.22, в которой контроллер связан с системой управления полетом.
Приоритет по пунктам:
23.02.2006 по пп.1-17;
24.06.2005 по пп.18-20;
26.05.2005 по пп.21-23.
| ОБТЕКАТЕЛЬ ВТУЛКИ НЕСУЩЕГО ВИНТА | 1991 |
|
RU2025409C1 |
| ОБТЕКАТЕЛЬ ВТУЛКИ ВОЗДУШНОГО ВИНТА | 0 |
|
SU304183A1 |
| US 4478379 A, 23.10.1984 | |||
| СПОСОБ ОБРАБОТКИ БЕСПЛАМЕННЫМ ГОРЕНИЕМ РАДИОАКТИВНЫХ УГЛЕРОДСОДЕРЖАЩИХ ОТХОДОВ | 2006 |
|
RU2328786C1 |

