Область техники, к которой относится изобретение
Изобретение относится к системе воздушных винтов противоположного вращения для газотурбинного двигателя летательного аппарата, в частности к системе воздушных винтов противоположного вращения со средствами обеспечения флюгирования их лопастей.
Изобретение относится также к газотурбинному двигателю летательного аппарата, содержащему такую систему воздушных винтов противоположного вращения.
Уровень техники
Известны газотурбинные двигатели с системами воздушных винтов противоположного вращения, винты которых приводятся во вращение роторами, вращающимися в противоположных направлениях. Как правило, такие системы выполнены так, чтобы лопасти воздушных винтов можно было флюгировать, т.е. устанавливать их с максимально малым углом атаки по отношению к оси соответствующего газотурбинного двигателя. Такое положение называют положением с минимальным углом атаки или нейтральным положением.
Флюгирование лопастей рабочих воздушных винтов может потребоваться в различных обстоятельствах, в частности при остановке двигателя, когда возникает необходимость в максимальном снижении лобового сопротивления, создаваемого неподвижными лопастями. В других обстоятельствах, когда один из двух воздушных винтов теряет лопасти, флюгирование лопастей обоих винтов необходимо, чтобы избежать чрезмерного повышения скорости другого винта.
Кроме того, флюгирование лопастей может потребоваться, если необходимо устранить или максимально снизить тягу газотурбинного двигателя, при этом, несмотря на их вращение вокруг оси двигателя, их нейтральное положение создает лишь незначительную тягу или даже не создает никакой тяги.
Флюгирование можно осуществить при помощи классических систем управления установкой лопастей, перемещая эти лопасти в положение минимального угла атаки. Вместе с тем, в случае неисправности этих систем управления флюгирование становится невозможным, что, естественно, недопустимо.
Раскрытие изобретения
Задачей изобретения является устранение, по меньшей мере частичное, вышеупомянутых недостатков известных технических решений.
Поставленная задача решена в системе воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата, содержащей первый и второй воздушные винты, центрованные по продольной оси. При этом первый воздушный винт содержит первый ротор с первыми лопастями, предназначенный для вращения в первом направлении вокруг продольной оси относительно статора этой системы воздушных винтов, и первую систему управления установкой первых лопастей, позволяющую перемещать их между положениями минимального и максимального углов атаки. Система управления установкой первых лопастей содержит первый скользящий элемент, имеющий возможность перемещения вдоль продольной оси и взаимодействующий с первыми лопастями таким образом, что его поступательное перемещение в первом направлении заставляет указанные первые лопасти приближаться к положению минимального угла атаки, а его поступательное перемещение во втором направлении, противоположном первому, заставляет указанные первые лопасти приближаться к положению максимального угла атаки. При этом указанный первый скользящий элемент управляется первым вращающимся средством привода, вращение которого вокруг продольной оси приводит к скольжению указанного первого элемента вдоль этой же оси. Указанная система управления установкой первых лопастей содержит первый двигатель, позволяющий придавать указанное вращение указанному первому вращающемуся средству привода, причем указанный первый скользящий элемент и первое вращающееся средство привода приводятся во вращение первым ротором в его первом направлении вращения относительно статора.
Второй воздушный винт содержит второй ротор со вторыми лопастями, предназначенный для вращения во втором направлении, противоположном первому, вокруг продольной оси относительно статора этой системы воздушных винтов, и вторую систему управления установкой вторых лопастей, позволяющую перемещать их между положениями минимального и максимального углов атаки. Система управления установкой вторых лопастей содержит второй скользящий элемент, имеющий возможность перемещения вдоль продольной оси и взаимодействующий с указанными вторыми лопастями таким образом, что его перемещение в третьем направлении скольжения заставляет указанные вторые лопасти приближаться к положению минимального угла атаки, а его перемещение в четвертом направлении скольжения, противоположном третьему, заставляет указанные вторые лопасти приближаться к положению максимального угла атаки. При этом указанный второй скользящий элемент управляется вторым вращающимся средством привода, вращение которого вокруг продольной оси приводит к скольжению указанного второго элемента вдоль этой же оси. Указанная система управления установкой вторых лопастей содержит второй двигатель, позволяющий придавать указанное вращение указанному второму вращающемуся средству привода, причем указанный второй скользящий элемент и второе вращающееся средство привода приводятся в действие вторым ротором в его втором направлении вращения относительно статора.
Согласно изобретению система воздушных винтов противоположного вращения содержит также средства сцепления, выполненные с возможностью неподвижного соединения во вращении первого и второго вращающихся средств привода, так что при вводе в зацепление этих средств сцепления возникают две относительные скорости вращения соответственно между первым скользящим элементом, вращаемым первым ротором, и его соответствующим первым вращающимся средством привода, и между вторым скользящим элементом, вращаемым вторым ротором, и его соответствующим вторым вращающимся средством привода, заставляя первый и второй скользящие элементы перемещаться в первом и третьем направлениях скольжения соответственно, приводя первые и вторые лопасти в положение минимального угла атаки.
Изобретение является недорогим и простым в применении, а также позволяет получить надежное и быстрое флюгирование лопастей обоих воздушных винтов.
Таким образом, изобретение основано на использовании средств сцепления, позволяющих неподвижно соединять в отношении вращения первые и вторые вращающиеся средства привода, причем эти средства сцепления требуют небольшой энергии и легко интегрируются в классическую архитектуру систем воздушных винтов противоположного вращения.
В системе согласно изобретению пока средства сцепления остаются отключенными, первые и вторые вращающиеся средства привода вращаются в противоположных направлениях вместе с их соответствующими роторами, т.е. каждое в одном направлении и со скоростью вращения, идентичной скорости вращения своих соответствующих ротора и скользящего элемента. Вместе с тем, когда средства сцепления включаются по команде на флюгирование лопастей, первые и вторые вращающиеся средства привода оказываются связанными в отношении вращения так, что имеют одинаковые скорость и направление вращения.
В первом самом характерном случае эта скорость вращения первых и вторых вращающихся средств привода стремится к алгебраической сумме скоростей вращения роторов, т.е. становится нулевой. Однако возможен второй случай, когда скорость двух вращающихся средств привода может стремиться к скорости, не равной нулю, что означает, что эти два привода приводятся во вращение в большей степени одним ротором. Тем не менее, в этом последнем случае скорость этих двух вращающихся средств привода останется ниже скоростей вращения роторов и скользящих элементов, вращаемых этими роторами.
Как бы то ни было в этих двух возможных случаях именно относительная скорость вращения между вращающимися средствами привода, взаимно тормозящимися за счет своего соединения, и их соответствующими скользящими элементами, по-прежнему вращающимися со скоростью своих роторов, позволяет автоматически получать перемещение скользящих элементов в определенных направлениях, что приводит к флюгированию лопастей обоих воздушных винтов.
Следует отметить, что указанный второй случай отличается от первого тем, что флюгирование лопастей воздушного винта, когда привод его вращения вращается в направлении, противоположном направлению вращения соответствующего ротора, происходит быстрее, чем флюгирование лопастей другого воздушного винта, привод вращения которого вращаются в том же направлении, что и соответствующий ротор, но с меньшей скоростью по причине торможения другим воздушным винтом через средства сцепления.
Кроме того, следует отметить, что предпочтительно систему воздушных винтов противоположного вращения выполняют таким образом, что когда скользящие элементы приходят к концу хода в их поступательном движении относительно соответствующих вращающихся средств привода, устанавливая лопасти в нейтральное положение, упоры в конце хода не дают им продолжить скольжение вдоль вращающихся средств привода, несмотря на различие скоростей вращения между этими элементами. В результате происходит блокировка, благодаря которой скользящие элементы оказываются заблокированными в отношении вращения с их соответствующими вращающимися средствами привода. Для информации можно отметить, что эти упоры могут быть упругими, чтобы свести к минимуму удары от столкновения со скользящими элементами.
После прихода скользящих элементов в положение упора вращающиеся средство привода вращаются вместе с роторами, и поскольку они сцеплены между собой, сцепление играет роль дискового тормоза. Таким образом, простое приведение в действие средств сцепления приводит последовательно и автоматически к флюгированию лопастей и к прекращению вращения воздушных винтов.
Это прекращение вращения воздушных винтов происходит также, но последовательно, когда первый и второй вращающиеся средства привода продолжают вращаться на малой скорости в результате приведения в действие средств сцепления. Действительно, в указанном выше случае, когда вращающееся средство привода одного воздушного винта вращается в направлении, противоположном вращению вращающегося средства привода другого воздушного винта, приход в положение упора скользящего элемента, связанного с этим воздушным винтом, происходит раньше, чем для другого воздушного винта. Таким образом, первый воздушный винт флюгируется раньше, чем второй, и его вращающееся средство привода блокируется в отношении вращения относительно его ротора. Поскольку оба вращающихся средства привода включены, они вращаются вместе относительно второго ротора, и, следовательно, вращающееся средство привода второго ротора вращается относительно этого второго ротора, заставляя флюгироваться второй воздушный винт. Как было указано выше, это приводит к блокировке, приводящей также к прекращению вращения скользящего элемента, а также к прекращению вращения ротора, связанного в отношении вращения с этим элементом.
Предпочтительно каждое из указанных вращающихся средств привода выполнено в виде шарико-винтовой передачи.
Предпочтительно указанные средства сцепления, позволяющие соединять в отношении вращения первый и второй вращающиеся средства привода, представляют собой систему сцепления со скользящими дисками, предпочтительно управляемую мотором, установленным на одном из вращающихся средств привода.
Предпочтительно каждый из скользящих элементов содержит скользящий конус, взаимодействующий с эксцентриковым пальцем на каждой из связанных с ним лопастей.
Предпочтительно указанные первое и третье направления скольжения являются идентичными, также как идентичными являются указанные второе и четвертое направления скольжения. Естественно, можно предусмотреть обратный порядок, не выходя за рамки изобретения.
Объектом настоящего изобретения является также газотурбинный двигатель летательного аппарата, содержащий описанную выше систему воздушных винтов противоположного вращения, при этом указанный газотурбинный двигатель предпочтительно является турбовинтовым двигателем, но в альтернативном варианте он может быть и турбореактивным двигателем. В последнем случае система входит в состав вентилятора турбореактивного двигателя.
Кроме того, независимо от типа рассматриваемого газотурбинного двигателя, предпочтительно систему выполняют таким образом, чтобы воздушные винты не содержали охватывающего их наружного радиального обтекателя, в этом случае систему называют «Открытый ротор».
Наконец, объектом изобретения является также способ управления описанной выше системой воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата. Согласно этому способу, при необходимости установки минимального угла атаки первых и вторых лопастей, т.е. для флюгирования этих лопастей, на указанные средства сцепления, позволяющие связать в отношении вращения указанные первый и второй вращающиеся средства привода, подают команду на их сцепление.
Другие особенности и преимущества изобретения будут более понятны из дальнейшего описания со ссылками на чертежи.
Краткое описание чертежей
На фиг.1 показана система воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата согласно первому предпочтительному варианту осуществления изобретения, вид в продольном разрезе;
на фиг.2а и 2b схематично показана часть системы воздушных винтов противоположного вращения, изображенной на фиг.1, с иллюстрацией ее работы при флюгировании лопастей воздушных винтов, два вида в продольном разрезе;
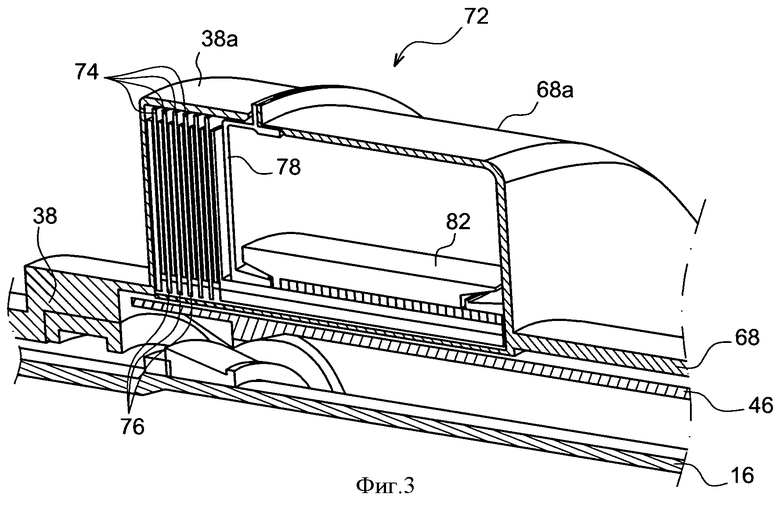
на фиг.3 показаны средства сцепления, позволяющие связать в отношении вращения часть каждого из двух воздушных винтов системы, изображенной на предыдущих фигурах, вид в перспективе в увеличенном масштабе.
Осуществление изобретения
На фиг.1 показана часть системы 1 воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата согласно предпочтительному варианту осуществления изобретения.
Ось Х соответствует продольному направлению системы 1 воздушных винтов, которое соответствует также продольному направлению газотурбинного двигателя, на котором установлена эта система 1 воздушных винтов. Ось Y соответствует поперечному направлению системы 1 воздушных винтов, а ось Z соответствует вертикальному направлению или высоте, причем эти три оси являются взаимно ортогональными.
Система 1 воздушных винтов содержит статор или корпус 2 (показан только схематично), центрованный по продольной оси 4 системы, параллельной оси X. Статор предназначен для неподвижного соединения известным образом с другими корпусными элементами газотурбинного двигателя. В этой связи следует отметить, что систему 1 воздушных винтов предпочтительно выполняют таким образом, чтобы воздушные винты не содержали охватывающего их наружного радиального обтекателя, т.е. чтобы она был системой типа «открытый ротор», показанной на фиг.1.
Кроме того, система 1 воздушных винтов противоположного вращения содержит первый воздушный винт 6 или входной винт, на котором установлены лопасти 6а. Аналогично, система 1 содержит второй воздушный винт 8 или выходной винт, на котором установлены лопасти 8а. Таким образом, воздушные винты 6 и 8 смещены друг относительно друга по существу в направлении прохождения потока воздуха через систему 1, схематично показанном стрелкой 10 и параллельном оси X, причем это направление потока служит также основой для определения вышеуказанных терминов «входной» и «выходной». Два воздушных винта 6 и 8 предназначены для вращения в противоположных направлениях вокруг оси 4, по которой они центрованы, при этом вращение происходит относительно статора 2, который остается неподвижным. Воздушный винт 6 вращается в первом направлении 12, например, по часовой стрелке, если смотреть спереди, а воздушный винт 8 вращается во втором направлении 14, противоположном первому, например, против часовой стрелки, если смотреть спереди, хотя можно предусмотреть и обратный порядок.
В дальнейшем понятие «скорость вращения» данного элемента соответствует его скорости вращения по отношению к неподвижному статору 2 вокруг продольной оси 4, если только он не расположен по-другому.
Что касается первого воздушного винта 6, то он содержит приводной вал 16, центрованный по оси 4 и предназначенный для приведения во вращение от устройства механической трансмиссии (не показано), например, образующего редуктор с зубчатой передачей, который, в свою очередь, приводится во вращение турбиной газотурбинного двигателя.
На входном конце этого полого вала 16 жестко закреплен первый ротор 18, вращающийся в первом направлении 12, при этом в данном роторе на его наружном в радиальном направлении конце, т.е. на его кольцевом венце расположены первые лопасти ба воздушного винта. Для этого в роторе 18, центрованном на оси 4, выполнены отверстия 20, в которые входят ножки 21 лопастей 6а. Каждая ножка 21 содержит эксцентриковый палец 22, смещенный относительно главной оси 24 лопасти, предпочтительно соответствующей радиальной оси системы 1 рабочих колес.
Следует отметить, что ротор 18 по существу имеет форму усеченного конуса, начинающуюся от входного конца приводного вала 16 и расходящуюся в сторону выхода.
Как известно, эксцентриковые пальцы 22, выступающие радиально внутрь, принадлежат к первой системе 26 управления установкой первых лопастей, позволяющей перемещать эти лопасти между положениями минимального и максимального углов атаки относительно оси 4. Перемещение каждой лопасти 6а между этими положениями осуществляют путем поворота вокруг ее собственной оси, т.е. путем поворота вокруг ее главной оси 24, которая соответствует также оси соответствующего отверстия 20.
Для этого система 26 управления содержит первый скользящий элемент, например, типа приводного конуса 28 с центром на оси 4, выполненного с возможностью поступательного перемещения относительно статора вдоль этой оси.
Этот приводной конус 28, например, расходящийся в сторону входа, содержит на своем входном конце большего диаметра множество отверстий 30, в которые входят эксцентриковые пальцы 22 первых лопастей. Как известно специалисту, перемещение конуса 28 в первом направлении 32а скольжения, т.е. в сторону входа вдоль оси 4, заставляет первые лопасти 6а приближаться к положению минимального угла атаки, называемому также нейтральным положением, которое и является необходимым для флюгирования воздушного винта 6. Как было указано выше, поворот лопастей 6а в отверстиях 20 вокруг их осей 24 в направлении нейтрального положения, показанного на фиг.1, происходит в ответ на поступательное перемещение конуса 28, действующего на установленные на нем эксцентриковые пальцы 22. На фиг.1 конус 28 показан в положении конца хода в первом направлении 32а скольжения, в котором он позволяет лопастям 6а принять нейтральное положение, обеспечивающее флюгирование винта. Вместе с тем, в альтернативном варианте систему 1 можно выполнить таким образом, чтобы получать нейтральное положение лопастей ба при помощи конуса 28, оказывающегося в конце хода во втором направлении 32b скольжения, противоположном первому направлению 32а.
Если рассматривать фиг.1, то можно отметить, что так же, как было указано выше, перемещение конуса 28 вдоль оси 4 во втором направлении 32b скольжения, т.е. в сторону выхода, заставляет первые лопасти 6а приближаться к положению максимального угла атаки, необходимому для получения максимальной тяги. В данном случае поворот лопастей ба вокруг их осей 24 в сторону максимального угла атаки тоже происходит в результате поступательного движения конуса 28, действующего на установленные на нем эксцентриковые пальцы 22.
Следует отметить, что с учетом размещения эксцентриковых пальцев 22 в отверстиях 30 конуса при необходимости на шаровых опорах 31 вал 16, ротор 18 и лопасти 6а образуют вместе единый в отношении вращения вокруг оси 4 узел. Например, перемещение пальцев 22 и конуса 28 может состоять одновременно из поступательного движения вдоль оси 4 и вращения вокруг этой оси. Можно также, например, обойти это двойное движение, вставив кольцо между эксцентриковыми пальцами ножки лопасти и этим конусом. В таком случае вышеуказанное вращение происходит между кольцом и конусом, т.е. этот конус уже не совершает осевого поступательного движения.
Для обеспечения поступательного движения приводного конуса 28 в направлениях 32а и 32b систему 26 управления оборудуют первым вращающимся средством привода, например, в виде шарико-винтовой передачи 38, центрованной по оси 4. Эта шарико-винтовая передача 38 выполнена классически таким образом, чтобы обеспечивать преобразование вращательного движения вокруг оси 4 в поступательное движение конуса 28 вдоль этой же оси 4, наподобие винтового транспортера.
Шарико-винтовая передача 38 расположена вокруг вала 16 и охвачена приводным конусом 28, внутренний по существу цилиндрический участок 41 которого взаимодействует с наружной резьбой винта шарико-винтовой передачи 38, который остается постоянно неподвижным относительно ротора 18 и статора. В этой связи следует отметить, что конус 28 является единственным из вышеуказанных элементов воздушного винта 6, который может поступательно перемещаться вдоль оси 4 относительно статора, а другие элементы остаются неподвижными в осевом направлении относительно друг друга и относительно этого статора.
Передний по потоку конец винта шарико-винтовой передачи 38 соединен с первым двигателем 40, придающим вращение этому винту для обеспечения поступательного перемещения конуса 28. Двигатель 40 содержит статор, закрепленный на роторе воздушного винта 6, например, на кольцевой опоре, имеющейся на роторе 18, и ротор, закрепленный на винте шарико-винтовой передачи 38. Таким образом, когда двигатель 40 выключен, винт шарико-винтовой передачи 38 приводится во вращение вокруг оси 4 ротором воздушного винта, т.е. в том же направлении и с той же скоростью, что и вышеуказанный единый во вращении узел, содержащий вал 16, ротор 18, лопасти 6а и конус 28. Эта блокировка в отношении вращения винта шарико-винтовой передачи 38 и вышеуказанного узла обеспечивается в этом случае отсутствием вращения ротора 18 относительно статора двигателя 40.
Когда двигатель 40 приводят в действие, скорость вращения винта шарико-винтовой передачи 38 становится отличной от скорости вращения конуса 28, все так же неподвижно соединенного с ротором 18, в результате чего возникает относительная скорость вращения между этими элементами, что приводит к требуемому скольжению конуса 28 в одном из двух направлений 32а, 32b вдоль винта шарико-винтовой передачи 38, который остается неподвижным в осевом направлении относительно статора. Именно таким образом, т.е. управляя двигателем 40, можно обеспечить установку лопастей 6а между их положениями минимального и максимального углов атаки.
Что касается второго воздушного винта 8, расположенного ближе к выходу, его конструкция по существу аналогична конструкции первого воздушного винта 6. Второй воздушный винт 8 содержит приводной вал 46, центрованный по оси 4 и, например, расположенный вокруг проходящего через него приводного вала 16. Он тоже предназначен для приведения во вращение от устройства механической трансмиссии, вращаемого турбиной газотурбинного двигателя.
На выходном конце этого полого вала 46 жестко закреплен второй ротор 48, вращающийся во втором направлении 14, и на своем наружном в радиальном направлении конце, т.е. на своем кольцевом венце этот ротор содержит вторые лопасти 8а воздушного винта. Для этого в роторе 48, центрованном по оси 4, выполнены отверстия 50 для вхождения в них ножек 51 лопастей 8а, причем каждая из этих лопастей содержит эксцентриковый палец 52, смещенный относительно главной оси 54 лопасти, предпочтительно соответствующей радиальной оси системы 1.
Следует отметить, что в данном случае ротор 48 по существу имеет форму усеченного конуса, начинающегося от выходного конца приводного вала 46 и расходящегося в сторону входа.
Эксцентриковые пальцы 52, выступающие радиально внутрь, принадлежат ко второй системе 56 управления установкой вторых лопастей, позволяющей перемещать эти лопасти между положениями минимального и максимального углов атаки относительно оси 4. Перемещение каждой лопасти 8а между этими положениями осуществляют путем ее поворота вокруг собственной оси в ее отверстии 50, т.е. путем поворота вокруг ее главной оси 54, которая соответствует также оси этого отверстия.
Для этого система 56 управления содержит второй скользящий элемент, например, типа приводного конуса 58 с центром на оси 4, выполненного с возможностью поступательного перемещения вдоль этой оси.
Этот приводной конус 58, например, расходящийся в сторону входа, содержит на своем входном конце большего диаметра множество отверстий 60, в которые могут входить эксцентриковые пальцы 52 вторых лопастей. Как известно специалисту, перемещение конуса 58 в третьем направлении 62а скольжения вдоль оси 4, идентичном первому направлению 32а, т.е. в сторону входа, заставляет вторые лопасти 8а приближаться к нейтральному положению, которое и является необходимым для флюгирования воздушного винта 8. Как было указано выше, поворот лопастей 8а вокруг их осей 54 происходит в ответ на поступательное перемещение конуса 58, действующего на установленные на нем эксцентриковые пальцы 52. На фиг.1 конус 58 показан в положении конца хода в третьем направлении 62а скольжения, в котором он позволяет лопастям 8а принять нейтральное положение, обеспечивающее флюгирование винта. Вместе с тем, в альтернативном варианте систему 1 можно выполнить таким образом, чтобы получать нейтральное положение лопастей 8а при помощи конуса 58, оказывающегося в конце хода в четвертом направлении 62b скольжения, противоположном третьему направлению 62а, не выходя за рамки изобретения.
Если рассматривать фиг.1, то можно отметить, что так же, как было указано выше, перемещение конуса 58 в четвертом направлении 62b скольжения, идентичном вышеуказанному второму направлению 32b скольжения, т.е. в сторону выхода вдоль оси 4, заставляет вторые лопасти 8а приближаться к положению максимального угла атаки, необходимому для получения максимальной тяги. В данном случае поворот лопастей 8а вокруг их осей 54 в сторону максимального угла атаки тоже происходит в результате поступательного движения конуса 58, действующего на установленные на нем эксцентриковые пальцы 52.
Следует отметить, что с учетом размещения эксцентриковых пальцев 52 в отверстиях 60 конуса в случае необходимости на шаровых опорах 61 вал 46, ротор 48 и лопасти 8а образуют вместе единый в отношении вращения вокруг оси 4 узел. В данном случае перемещение пальцев 52 и конуса 58 тоже может одновременно состоять из поступательного движения вдоль оси 4 и вращения вокруг этой оси. Можно также, например, обойти это двойное движение, вставив кольцо между эксцентриковыми пальцами ножки лопасти и этим конусом. Вышеуказанное движение вращения происходит в этом случае между кольцом и конусом, т.е. этот конус уже не совершает осевого поступательного движения.
Для обеспечения поступательного движения приводного конуса 58 в направлениях 62а и 62b систему 56 управления установкой лопастей оборудуют вторым вращающимся средством привода, например, типа шарико-винтовой передачи 68, центрованной по оси 4. Эту шарико-винтовую передачу 68 выполняют классически таким образом, чтобы обеспечивать преобразование вращательного движения вокруг оси 4 в поступательное перемещение конуса 58 вдоль этой же оси 4, наподобие винтового транспортера.
Винт шарико-винтовой передачи 68 расположен вокруг вала 46 и охвачен приводным конусом 58, внутренний по существу цилиндрический участок 71 которого взаимодействует с наружной резьбой винта шарико-винтовой передачи 68, который остается постоянно неподвижным относительно ротора 48 и статора. В этой связи следует отметить, что конус 58 является единственным из вышеуказанных элементов воздушного винта 8, который может поступательно перемещаться вдоль оси 4 относительно статора, а другие элементы остаются неподвижными в осевом направлении друг относительно друга и относительно этого статора.
Задний по потоку конец винта шарико-винтовой передачи 68 соединен со вторым двигателем 70, придающим вращение этому винту для обеспечения поступательного перемещения конуса 58. Двигатель 70 содержит статор, закрепленный на роторе воздушного винта 8, например, на кольцевой опоре, имеющейся на роторе 48, и ротор, закрепленный на винте шарико-винтовой передачи 38. Таким образом, когда двигатель 70 выключен, винт шарико-винтовой передачи 68 приводится во вращение вокруг оси 4 ротором воздушного винта, т.е. в том же направлении и с той же скоростью, что и вышеуказанный единый во вращении узел, содержащий вал 46, ротор 48, лопасти 8а и конус 58. Эта блокировка в отношении вращения винта шарико-винтовой передачи 68 и вышеуказанного узла обеспечивается в этом случае отсутствием вращения ротора 48 относительно статора двигателя 70.
Когда двигатель 70 приводят в действие, скорость вращения винта шарико-винтовой передачи 68 становится отличной от скорости вращения конуса 58, все так же неподвижно соединенного с ротором 48, в результате чего возникает относительная скорость вращения между этими элементами, что приводит к требуемому скольжению конуса 58 в одном из двух направлений 62а, 62b воль винта шарико-винтовой передачи 68, который остается неподвижным в осевом направлении относительно статора. Именно таким образом, т.е. управляя двигателем 70, можно обеспечить установку вторых лопастей 8а между их положениями минимального и максимального углов атаки, причем независимо от установки первых лопастей 6а.
Одной из особенностей настоящего изобретения является установка средства сцепления, обозначенных позицией 72, позволяющих связать в отношении вращения оба винта шарико-винтовых передач 38, 68, в которых задний по потоку конец 38а винта первой шарико-винтовой передачи находится вблизи переднего по потоку винта 68а второй шарико-винтовой передачи, как показано на фиг.1. В частности, как будет описано подробнее со ссылками на фиг.3, оба указанных конца винтов взаимодействуют друг с другом, образуя средства 72 сцепления.
В целом система 1 воздушных винтов выполнена таким образом, что когда эти средства 72 сцепления включены, создается взаимное торможение вращающихся средств привода, т.е. возникает относительная скорость вращения между конусом 28, вращаемым первьм ротором 18, и притормаживаемым винтом шарико-винтовой передачи 38, и относительная скорость вращения между конусом 58, вращаемым вторым ротором 48, и притормаживаемьм винтом шарико-винтовой передачи 68, связанным с винтом 38. Эти относительные скорости вращения заставляют каждый из конусов 28, 58 перемещаться, соответственно, в первом направлении 32а и в третьем направлении 62а, приводя лопасти 6а, 8а в их нейтральное положение, обеспечивающее флюгирование.
На фиг.2 показана система 1 воздушных винтов при нормальной работе, т.е. в отсутствие команды на флюгирование винтов.
Как было указано выше, пока не подана команда на изменение установки, и пока средства сцепления остаются отключенными, винты шарико-винтовых передач 38 и 68 вращаются в противоположных направлениях 12 и 14, причем каждый в своем направлении и со скоростью, идентичной скорости соответствующего ротора 18, 48 и его соответствующего конуса 28, 58 по причине его приведения во вращения вокруг оси 4 этим ротором 18, 48. Во время этой нормальной работы газотурбинного двигателя, двигатели 40, 70 можно независимо включать для установки лопастей 6а, 8а в необходимые положения.
Когда в результате команды на флюгирование лопастей средства сцепления вводятся в зацепление, винты шарико-винтовых передач 38, 68 трутся друг о друга, увлекая тем самым друг друга, и, в конечном счете, быстро оказываются связанными в отношении вращения, автоматически приобретая одинаковые скорость и направление вращения.
В первом случае, когда взаимное трение винтов шарико-винтовых передач 36, 38 приводит к кинематическому равновесию между этими двумя винтами, их относительная скорость вращения становится нулевой. Во втором случае эти два влияния не приводят к кинематическому равновесию между винтами, и, следовательно, относительная скорость вращения винтов шарико-винтовых передач 38, 68 не равна нулю. Эта скорость остается ниже скорости вращения роторов 18, 48 и приводных конусов 28, 58, вращаемых этими роторами.
В этих двух случаях, когда оба винта связаны во вращении, именно относительная скорость вращения вокруг оси 4 между винтами шарико-винтовых передач 38, 68 и их соответствующими конусами 28, 58, по-прежнему вращающимися со скоростью роторов, позволяет автоматически получить быстрое и надежное перемещение конусов 28, 58, приводящее к флюгированию лопастей обоих воздушных винтов.
Кроме того, система 1 воздушных винтов противоположного вращения выполнена таким образом, что когда конусы 28, 58 приходят к концу своего поступательного перемещения относительно винтов шарико-винтовых передач 38, 68, приводя лопасти 6а и 8а в нейтральное положение, показанное на фиг.2b, упор в конце хода конусов не позволяет им продолжить движение вдоль винтов. Это положение упора может быть вызвано контактом между отверстиями 30, 60 в конусах 28, 58 и их соответствующими эксцентриковыми пальцами 22, 52, когда последние больше не могут перемещаться в сторону входа. Это приводит к блокировке, связывая конусы 28, 58 во вращении с их соответствующими винтами. В этой связи, предпочтительно, как схематично показано на фиг.1 на позиции 55, можно предусмотреть контакт типа плоскость-плоскость в конце хода между каждым конусом и соответствующим винтом. Разумеется, упоры 57 такого же типа можно выполнить для остановки хода в противоположном направлении перемещения конусов 28, 58.
В первом случае, когда винты шарико-винтовых передач 38, 68 прекращают вращаться относительно роторов 18 и 48, соответственно, в результате действия средств 72 сцепления, конусы одновременно достигают своего положения упора в конце поступательного хода. При этом лопасти оказываются флюгированными, и в результате прекращения их вращения относительно их роторов винты шарико-винтовых передач, соответственно, приводятся во вращение этими же роторами, при этом сцепление выполняет роль дискового тормоза, в результате чего воздушные винты стремятся остановиться. Таким образом, простое приведение в действие средств 72 сцепления автоматически приводит к флюгированию лопастей и к прекращению вращения воздушных винтов 6 и 8.
Во втором вышеупомянутом случае, когда винты шарико-винтовых передач 38, 68 продолжают вращаться с пониженной скоростью относительно статора в результате приведения в действие средств 72 сцепления, например, в направлении вращения 14, положение упора в конце хода конуса 28 возникает раньше, чем для конуса 58. Таким образом, именно в момент, когда конус 28 приходит в положение конца хода, показанное на фиг.2b, этот конус и его соответствующий винт шарико-винтовой передачи 38 блокируются и оказываются связанными во вращении с ротором 18. Таким образом, винт шарико-винтовой передачи 68 вращается с ротором 18, что ускоряет поступательное перемещение конуса 58 в третьем направлении 62а, который быстро приходит в свое положение конца хода, показанное на фиг.2b. Когда конус 58 достигает своего положения упора в конце хода, лопасть оказывается флюгированной, и винт шарико-винтовой передачи 68 стремится вращаться вместе с ротором 48. Поскольку роторы 18 и 48 вращаются в противоположных направлениях, а винты шарико-винтовых передач 38 и 68 связаны во вращении (эффект упора), сцепление ведет себя как дисковый тормоз, замедляя оба ротора 18 и 48.
На фиг.3 показан пример выполнения средств 72 сцепления, образованных выходным концом 38а первого винта шарико-винтовой передачи 38 и входным концом 68а второго винта шарико-винтовой передачи 68, причем эти два конца находятся близко друг к другу.
В целом средства 72 сцепления представляют собой систему сцепления со скользящими дисками. В частности, имеются два ряда дисков 74, 76, при этом первый ряд дисков 74, перпендикулярных к оси 4, находится в скользящей связи с винтом шарико-винтовой передачи 38, а второй ряд дисков 76, тоже перпендикулярных к оси 4, находится в скользящей связи с винтом шарико-винтовой передачи 68.
В состоянии покоя эти диски 74, 76 в достаточной мере отстоят друг от друга, чтобы избежать взаимного трения, поэтому оба винта шарико-винтовых передач 38, 68 могут вращаться в противоположных направлениях вокруг одной оси, не встречая помех со стороны средств 72 сцепления.
При подаче команды на флюгирование лопастей диски 74, 76 входят в контакт, устанавливая связь во вращении между двумя концами 38а, 68а винтов шарико-винтовых передач 38 и 68.
Для этого внутри входного конца 68а установлен поршень 78, выполненный с возможностью перемещения вдоль оси 4 относительно этого конца, чтобы прижимать диски 74, 76 один к другому, сжимая тем самым оба их ряда. Это поступательное перемещение поршня 78 обеспечивается двигателем 80 (схематично показан на фиг.1 и не показан на фиг.3), расположенным внутри входного конца 68а. Предпочтительно используется двигатель вращения, содержащий статор, закрепленный на входном конце 68а, и ротор 82, взаимодействующий с резьбовым участком поршня 78. Вращение ротора, неподвижного в осевом направлении относительно входного конца 68а, преобразуется в поступательное движение поршня 82 вдоль оси 4 относительно этого конца 68а.
Можно предусмотреть альтернативное решение для выключающихся средств 72, содержащее пружины с памятью формы, расширение которых приводит к созданию давления на поршень для обеспечения эффекта сцепления.
Разумеется, специалист может вносить различные изменения в описанное выше изобретение, представленное в качестве неограничивающего примера.


Система (1) воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата содержит первый и второй винты (6, 8), каждый из которых включает в себя систему (26, 56) управления установкой лопастей. Указанная система управления содержит вращающиеся средства (38, 68) привода, обеспечивающие поступательное перемещение скользящего элемента (28, 58) для поворота лопастей на заданный угол атаки. Согласно изобретению система воздушных винтов дополнительно содержит также средства (72) сцепления, позволяющие неподвижно соединять во вращении первые и вторые вращающиеся средства (38, 68) привода, при этом система воздушных винтов выполнена так, что при включении этих средств (72) сцепления возникает относительная скорость вращения между скользящими элементами (28, 58) и их соответствующими вращающимися средствами (38, 68) привода, что приводит лопасти (6а, 8а) в положение флюгирования. Позволяет получить надежное и быстрое флюгирование лопастей обоих воздушных винтов. 3 н. и 4 з.п.ф-лы, 4 ил.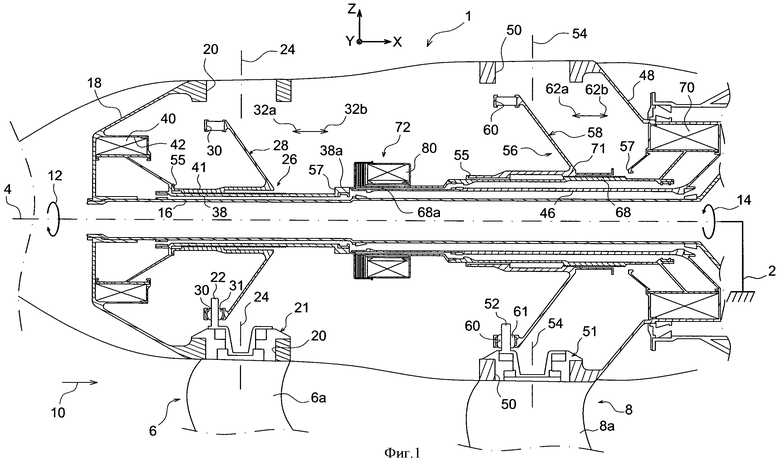
1. Система (1) воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата, содержащая первый и второй воздушные винты (6, 8), центрованные по продольной оси (4), при этом:
первый воздушный винт (6) содержит первый ротор (18) с первыми лопастями (6а), выполненный с возможностью вращения в первом направлении (12) вокруг продольной оси относительно статора (2) этой системы воздушных винтов, и первую систему (26) управления установкой первых лопастей, позволяющую перемешать их между положениями минимального и максимального углов атаки, при этом система управления установкой первых лопастей содержит первый скользящий элемент (28), выполненный с возможностью перемещения вдоль продольной оси и взаимодействующий с первыми лопастями так, что его поступательное перемещение в первом направлении (32a) заставляет указанные первые лопасти приближаться к положению минимального угла атаки, а его перемещение во втором направлении (32b), противоположном первому, заставляет первые лопасти приближаться к положению максимального угла атаки, при этом указанный первый скользящий элемент управляется первыми вращающимся средством (38) привода, вращение которого вокруг продольной оси приводит к скольжению указанного первого элемента вдоль этой же оси, а указанная система управления установкой первых лопастей (6а) содержит первый двигатель (40), выполненный с возможностью придавать вращение первым вращающимся средствам привода, причем указанный первый скользящий элемент и первые вращающиеся средства привода приводятся во вращение первым ротором в первом направлении вращения относительно статора;
второй воздушный винт (8) содержит второй ротор (48) со вторыми лопастями (8а), выполненный с возможностью вращения во втором направлении (14), противоположном первому, вокруг продольной оси относительно статора этой системы воздушных винтов, и вторую систему (56) управления установкой вторых лопастей, позволяющую перемещать их между положениями минимального и максимального углов атаки, при этом система управления установкой вторых лопастей содержит второй скользящий элемент (58), выполненный с возможностью перемещения вдоль продольной оси и взаимодействующий с указанными вторыми лопастями так, что его перемещение в третьем направлении (62а) заставляет указанные вторые лопасти приближаться к положению минимального угла атаки, а его перемещение в четвертом направлении (62b), противоположном третьему, заставляет указанные вторые лопасти приближаться к положению максимального угла атаки, при этом второй скользящий элемент управляется вторыми вращающимися средствами (68) привода, вращение которых вокруг продольной оси приводит к скольжению указанного второго элемента вдоль этой же оси, а указанная система управления установкой вторых лопастей содержит второй двигатель (70), выполненный с возможностью придавать вращение вторым вращающимся средствам привода, причем указанный второй скользящий элемент и вторые вращающиеся средства привода приводятся во вращение вторым ротором во втором направлении вращения относительно статора, отличающаяся тем, что указанная система воздушных винтов противоположного вращения содержит также средства (72) сцепления, выполненные с возможностью неподвижного соединения во вращении первого и второго вращающихся средств (38, 68) привода, так что при вводе в зацепление этих средств сцепления возникают две относительные скорости вращения соответственно между первым скользящим элементом (28), вращаемым первым ротором, и его соответствующим первым вращающимся средством (38) привода, и между вторым скользящим элементом (58), вращаемым вторым ротором, и его соответствующим вторым вращающимся средством (68) привода, заставляя первый и второй скользящие элементы перемещаться в первом и третьем направлениях скольжения соответственно, приводя первые и вторые лопасти (6а, 8а) в положение минимального угла атаки.
2. Система (1) по п.1, отличающаяся тем, что каждое из указанных вращающихся средств (38, 68) привода выполнено в виде шарико-винтовой передачи.
3. Система (1) по любому из пп.1 или 2, отличающаяся тем, что средства (72) сцепления, позволяющие соединять во вращении первые и вторые вращающиеся средства привода, представляют собой систему сцепления со скользящими дисками (74, 76).
4. Система (1) по п.1, отличающаяся тем, что каждый из первого и второго скользящих элементов (28, 58) содержит скользящий конус, взаимодействующий с эксцентриковым пальцем (22, 52) каждой из связанных с ним лопастей.
5. Система (1) по п.1, отличающаяся тем, что указанные первое и третье направления скольжения являются идентичными, также идентичными являются и указанные второе и четвертое направления скольжения.
6. Газотурбинный двигатель летательного аппарата, содержащий систему воздушных винтов противоположного вращения по п.1.
7. Способ управления системой (1) воздушных винтов противоположного вращения газотурбинного двигателя летательного аппарата по п.1, характеризующийся тем, что при необходимости установки минимального угла атаки первых и вторых лопастей на указанные средства (72) сцепления, позволяющие связать во вращении первые и вторые вращающиеся средства (38, 68) привода, подают команду на их сцепление.
| ОСНОВНОЙ ЛИСТ ДЛЯ ЛИСТА АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ, ЛИСТ АНИЗОТРОПНОЙ КРЕМНИСТОЙ СТАЛИ, КОТОРЫЙ ИСПОЛЬЗУЕТСЯ В КАЧЕСТВЕ МАТЕРИАЛА ОСНОВНОГО ЛИСТА ДЛЯ ЛИСТА АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ, СПОСОБ ПРОИЗВОДСТВА ОСНОВНОГО ЛИСТА ДЛЯ ЛИСТА АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ И СПОСОБ ПРОИЗВОДСТВА ЛИСТА АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 2018 |
|
RU2761517C1 |
| Широкополосный ультразвуковой преобразователь | 1981 |
|
SU985976A1 |
| СПОСОБ РАЗМНОЖЕНИЯ ЧЕРЕНКАМИ | 2002 |
|
RU2218747C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ФАЗ ВАЛА | 1996 |
|
RU2176755C2 |
| Гребной винт с переменным шагом | 1925 |
|
SU1312A1 |
| ВОЗДУШНЫЙ ВИНТ ИЗМЕНЯЕМОГО ШАГА И СПОСОБ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЕГО ЛОПАСТЕЙ | 1996 |
|
RU2099242C1 |

