Изобретение относится к средствам для безопасного ведения огня из закрытой позиции.
В боевых условиях, при ведении огня из стрелкового оружия (или других видов переносного оружия), из стационарных укрытий, широко используются толстостенные защитные перегородки с проделанными в них бойницами для размещения в них стволов оружия. При этом прицеливание осуществляется визуально через те же бойницы, диаметр которых достаточно велик, чтобы обеспечить необходимую обзорность поля боя. Сам по себе размер бойницы уже несет в себе определенную опасность поражения бойца через широкий проем. Бойницы с уменьшенным проемом, несколько превышающим диаметр ствола, проигрывают в обзорности и более безопасны, но и они могут быть использованы врагом для прицельного поражения бойца в процессе установки или изъятия оружия. Все это относится к широко известным способам ведения огня в боевых условиях.
Известно также использование перископов для ведения огня из укрытия в виде окопа. Данная система позволяет вести огонь полностью находящемуся в окопе стрелку, одновременно осуществляющему прицеливание при помощи особой конструкции из металлических трубок и стержней (заявка №95121204, МПК F41G 01/40, опубл. 27.12.1998).
Однако такое устройство не обеспечивает высокую точность стрельбы и не универсально, так как не позволяет вести огонь через бойницы, кроме того, данная конструкция громоздка и не позволяет быстро менять боевую позицию.
В качестве прототипа выбрана система дистанционного управления стрельбой, содержащая стационарную систему видеонаблюдения, установленную в зоне предполагаемых боевых действий, и систему управления стрелковым оружием на основе полученной от системы видеонаблюдения информации (заявка на выдачу патента РФ №2005127400, МПК F41H 11/00, от 31.08.2005, опубл. 10.03.2007). Данная система предполагает полностью автоматизированную стрельбу, т.к. спусковой механизм стрелкового оружия снабжен приводами горизонтального и вертикального перемещения, соединенными с блоком управления.
Однако отсутствие человеческого участия не всегда является преимуществом, поскольку правильный выбор цели достигается, прежде всего, разумной работой бойца, осуществляющего охрану контролируемой им зоны.
Задачей настоящего изобретения является создание системы для ведения прицельного огня из укрытий, обеспечивающей высокий уровень точности ведения огня, максимальную безопасность стрелка и исключение поражения случайных целей.
Поставленная задача решается следующим образом.
В системе для ведения прицельного огня из укрытия, содержащей стационарную аппаратуру видеонаблюдения за полем боя в зоне предполагаемых боевых действий, согласно изобретению аппаратура видеонаблюдения, выполненная с функциональной возможностью измерения расстояния до цели (целей), удалена от места ведения стрельбы из оружия, осуществляемой бойцом через бойницу, содержащую поворотный элемент для установки в нем оружия с образованием бронезащиты, при этом поворотный элемент взаимодействует с датчиком его углового положения, соединенным с электронным комплексом, осуществляющим обработку видеоизображений, выход которого подключен к интерфейсному устройству, передающему бойцу информацию о цели.
Технический результат заключается в повышении точности выбора и поражения цели при надежной защите бойца, осуществляющего стрельбу, и обеспечивается:
применением аппаратуры видеонаблюдения (с достаточно высокой разрешающей способностью), позволяющей организовать высокий уровень точности ведения огня;
отнесением системы видеонаблюдения от места ведения прицельной стрельбы;
повышением защищенности стрелка за счет устранения выемок для прицеливания в его бронезащите.
Кроме того, в случае использования бойцом крупногабаритного (длинноствольного) оружия в поворотный элемент может вставляться с образованием бронезащиты только часть оружия, например фрагмент ствола.
Кроме того, при установленном в поворотный элемент оружии или его части образуется сплошная бронезащита, что исключает незащищенность пространства в укрытии.
Кроме того, часть поворотного элемента, контактирующая с частью оружия, может быть выполнена в виде бронезащитной опоры - вставки. При этом опора-вставка является не только элементом бронезащиты, но и адаптером под тип оружия, что позволяет вести огонь из бойницы из разного оружия с предварительно установленной на нем соответствующей опорой-вставкой.
Кроме того, систему ведения прицельного огня снабжают несколькими аналогичными местами ведения стрельбы из одного укрытия или из нескольких укрытий, с использованием информации от единой системы видеонаблюдения, что позволяет контролировать все поле боя и все возможные подходы к укрытию.
Кроме того, для обеспечения функциональной возможности измерения расстояния до цели (целей) система видеонаблюдения содержит одну и более стереокамер.
Кроме того, датчик углового положения поворотного элемента может быть выполнен как оптоэлектронное устройство. Это обеспечивает простоту конструкции поворотного элемент и не требует при проведении измерений непосредственного механического контакта с поворотным элементом.
Кроме того, интерфейсное устройство может быть выполнено в виде монитора с сенсорным экраном, предназначенным для выбора объекта прицеливания на текущем изображении окружающего пространства с системы видеонаблюдения и демонстрации на данном изображении метки текущего положения прицеливания и метки, обозначающей выбранный объект, что позволяет достаточно оперативно наводить оружие на цель и производить стрельбовые поправки.
Кроме того, место ведения стрельбы из укрытия может быть размещено на подвижном транспортном средстве, а сама система снабжена дополнительно датчиками положения и ориентации транспортного средства, соединенными с электронным комплексом обработки видеоизображений. При этом обеспечивается возможность охраны значительно большей площади, а также оперативное отступление на следующие рубежи защиты.
Кроме того, для упрощения монтажа системы в укрытии система видеонаблюдения может быть соединена с электронным комплексом обработки видеоизображений посредством радиоканала.
На фиг.1 представлена общая схема варианта исполнения системы для ведения прицельной стрельбы из укрытия; на фиг.2 - разрез А-А, обозначенный на фиг.1; на фиг.3 - вид Б, обозначенный на фиг.1; на фиг.4 - бронезащита с дополнительной опорой-вставкой; на фиг.5 - способ закрепления бронезащитной опоры-вставки на фрагменте ствола оружия; на фиг.6 - общая схема транспортного варианта исполнения системы; на фиг.7 - иллюстрация геометрических построений для объяснения процесса подготовки системы к работе; на фиг.8 - иллюстрация геометрических построений к объяснению работы системы; на фиг.9 - модель изображения, выводимого на интерфейсное устройство (монитор с сенсорным экраном).
На фиг.1 показана бойница 1 с вставленным в нее поворотным элементом, составленным из полусфер 2 и фланцев 3. В поворотном элементе жестко зафиксирован фрагмент ствола оружия 4. Поворотный элемент (2, 3) взаимодействует с датчиком углового положения 5, который однозначно фиксирует его. Бойница 1 снабжена шарнирно-закрепленной поворотной броневой заслонкой 6, поднимающейся при установке в бойницу оружия 4, закрепленного в поворотном элементе (2, 3), и опускающейся при его выемке.
Датчик углового положения 5 может быть выполнен как оптоэлектронное устройство, которое для проведения измерений не требует непосредственного механического контакта с поворотным элементом (2, 3). Данный датчик однотипен классу сенсоров, применяемых в оптических компьютерных мышах, что обеспечивает простоту конструкции поворотного элемента.
Датчик 5 углового положения поворотного элемента соединен при помощи проводной линии связи через разъем 7 с электронным комплексом 8 для обработки видеоизображений. Электронный комплекс 8 оснащен радиомодемом, работающим в режиме приема видеосигнала от аппаратуры видеонаблюдения 9.
В качестве аппаратуры видеонаблюдения 9 может быть использован комплекс, собранный из серийно выпускаемых деталей и узлов: видеоаппаратуры, помещенной в герметичный термокожух и снабженной радиомодемом, работающим в режиме передачи видеосигнала. Видеоаппаратура может включать в себя одну или несколько стереокамер, каждая из которых представляет две аналогичные видеокамеры, разнесенные на определенное расстояние между собой (стереоскопический базис, варьирующийся от максимальной дальности определения расстояния до объекта прицеливания) с параллельными главными оптическими осями их объективов.
Электронный комплекс 8 соединен при помощи проводной линии связи с интерфейсным устройством 10. Устройство 10 может быть выполнено в виде монитора с сенсорным экраном, предназначенным для выбора объекта прицеливания на текущем изображении окружающего пространства с системы видеонаблюдения 9 и демонстрации на данном изображении метки текущего положения прицеливания и метки, обозначающей выбранный объект.
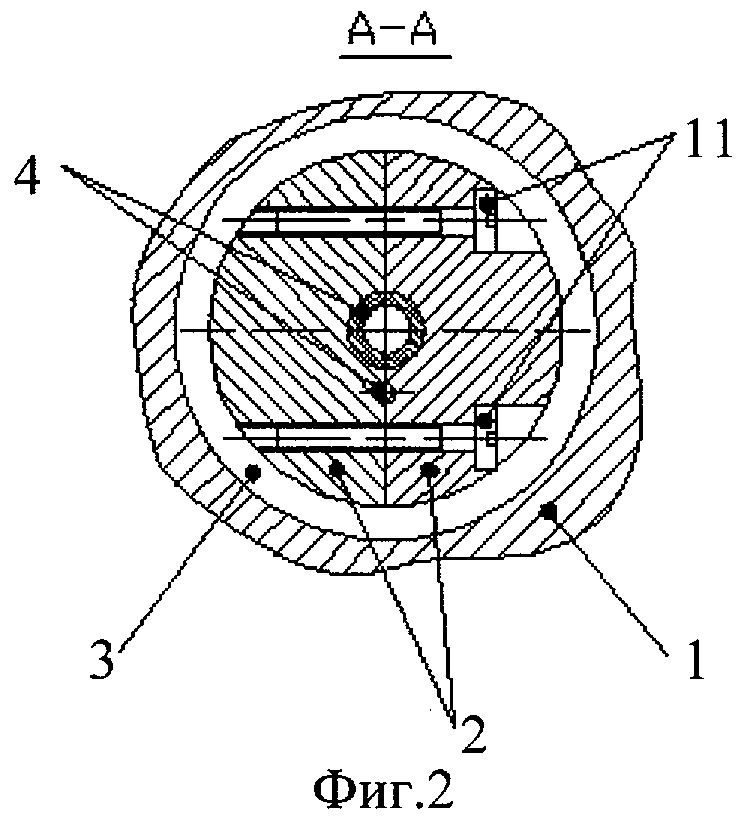
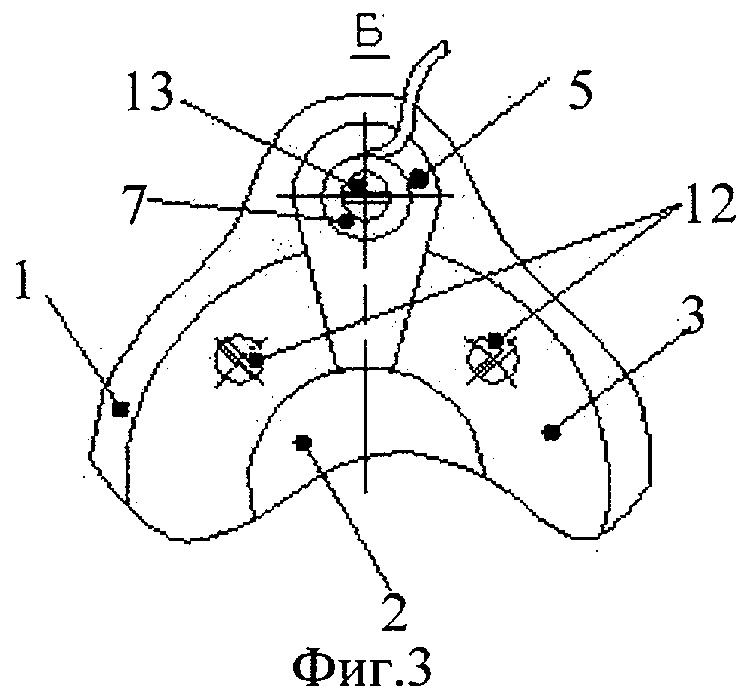
На фиг.2 изображен разрез А-А, фиг.1, показывающий две полусферы 2, охватывающие фрагмент ствола оружия 4, скрепленные вместе двумя винтами 11. Данная конструкция закрепляется в двух фланцах 3, при помощи четырех винтов 12, фиг.3. На фиг.3 также показан корпус датчика углового положения 5, выполненный в виде эксцентрика, поворачивающегося на оси 13. Датчик при повороте своим корпусом фиксирует поворотный элемент (2, 3) в бойнице 1, препятствуя его случайному выпадению из бойницы.
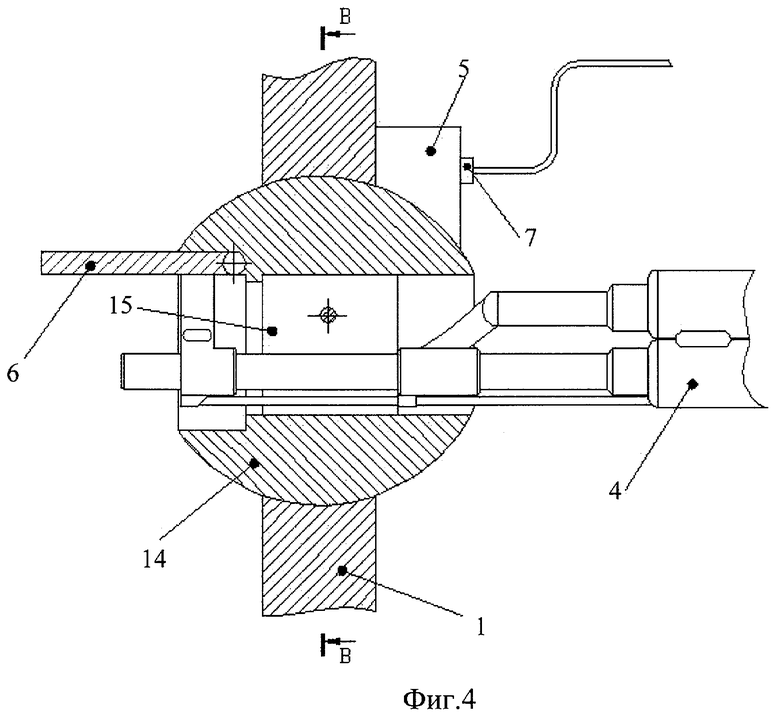
На фиг.4 показан вариант исполнения системы, отличающийся неизвлекаемым поворотным элементом 14, выполненным в виде сферы с проточенным в ней каналом под установку бронезащитной опоры-вставки 15 и поворотной броневой заслонки 6. При этом датчик 5 жестко зафиксирован на бронезащитной плите бойницы 1.
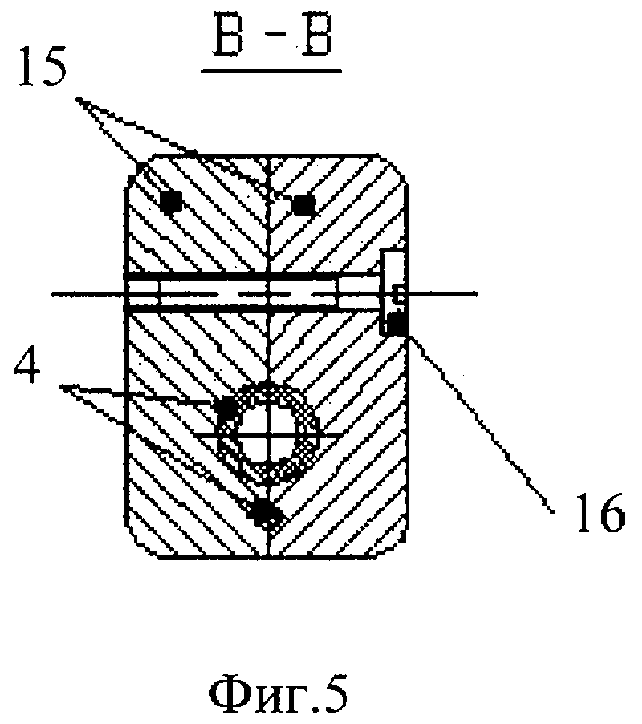
На фиг.5 показана бронезащитная опора-вставка, состоящая из двух деталей 15, охватывающих ствол оружия 4 и однозначно позиционируемых на нем в области дульного среза. Детали 15 скрепляются между собой винтом 16.
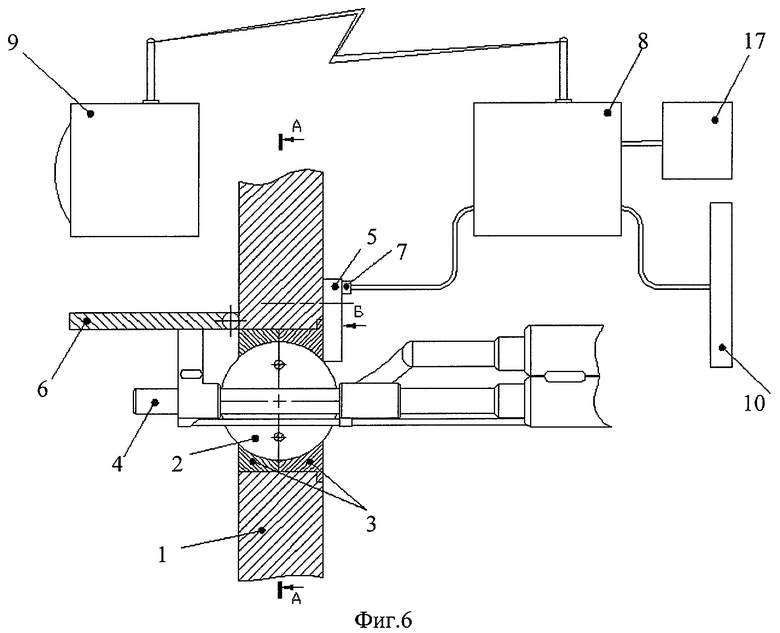
На фиг.6 показан вариант исполнения системы для ведения прицельного огня, отличающийся размещением места ведения стрельбы на подвижном транспортном средстве. При этом система дополнительно снабжена датчиками 17 положения и ориентации транспортного средства, соединенными проводными линиями связи с электронным комплексом 8. Датчики 17, установленные на транспортном средстве, могут включать в себя приемники глобальной навигационной спутниковой системы (GPS и/или Глонасс), электронный компас и автоматизированный измеритель крена транспортного средства по двум осям (по типу авиационных датчиков).
Система для организации круговой обороны укрытия может быть оснащена несколькими аналогичными местами ведения стрельбы - бойницами 1, сделанными с разных направлений подходов к укрытию, при этом управление огнем осуществляется исходя из информации полученной от единой системы видеонаблюдения. Смена бойцом огневой позиции происходит в следующем порядке. Для систем, приведенных на фиг.1 и фиг.6, осуществляются следующие действия: расстыковывается разъем 7, поворачивается датчик 5 на оси 13, затем из бойницы 1 вынимается оружие 4 вместе с закрепленным на нем поворотным элементом (2, 3) и переносится к другой бойнице, вставляется в нее, поворачивается датчик 5 и стыкуется разъем 7. В варианте системы, приведенном на фиг.4, осуществляются следующие действия: расстыковывается разъем 7, затем из бойницы 1 вынимается оружие 4 вместе с закрепленной на нем бронезащитной опорой-вставкой 15 и переносится к другой бойнице, вставляется в нее, и стыкуется разъем 7.
Для энергоснабжения электронных компонентов в системе могут использоваться преимущественного автономные источники питания (АИП). Электропитание датчиков 5 и интерфейсного устройства 8 осуществляется по проводным линиям связи от АИП электронного комплекса 8. Система видеонаблюдения 9 работает от собственного автономного источника электропитания. Датчики 17 могут запитываться от бортовой электросистемы транспортного средства или от АИП электронного комплекса 8.
Перед началом работы производят подготовку и калибровку системы.
1. Устанавливают компоненты системы на местности и в укрытии.
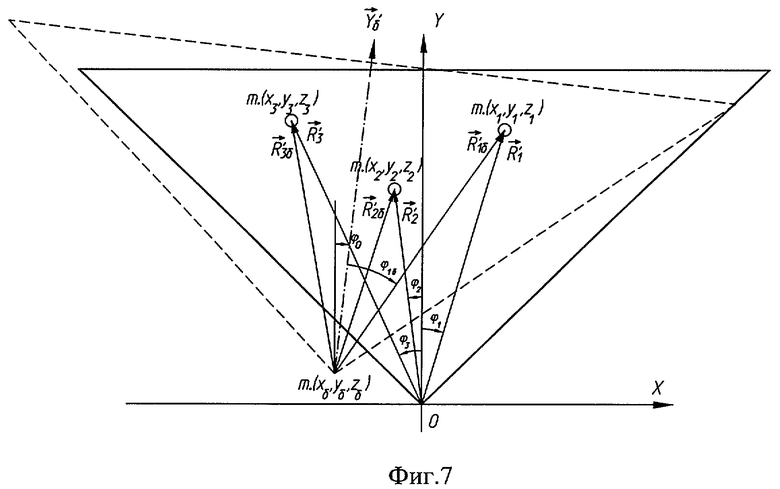
2. Определяют координаты (хб, уб, zб) бойницы в декартовой системе OXYZ, где О - точка установки системы видеонаблюдения, ось Y - вектор абсциссы телесного угла зоны обзора системы видеонаблюдения, ось X параллельна поверхности земли (перпендикулярна силе тяготения), ось Z дополняет до правоориентированного базиса, фиг.7. Определяют ориентацию вектора  абсциссы телесного угла зоны обстрела, ведущегося из бойницы - угол φ0 между
абсциссы телесного угла зоны обстрела, ведущегося из бойницы - угол φ0 между  и плоскостью OYZ, угол ψ0 между
и плоскостью OYZ, угол ψ0 между  и плоскостью OXY. На фиг.7 сплошной жирной линией обозначена зона обзора системы видеонаблюдения, а пунктирной - зона обстрела.
и плоскостью OXY. На фиг.7 сплошной жирной линией обозначена зона обзора системы видеонаблюдения, а пунктирной - зона обстрела.
Данные координаты могут измеряться следующим образом.
- В просматриваемой системой видеонаблюдения области (сцене) на разных высотах устанавливают три тестовых объекта (три шара).
- Получают стереоскопическое изображение сцены при помощи системы видеонаблюдения (стереокамеры) и передают его по радиоканалу на электронный комплекс 8.
Электронный комплекс 8 по зарегистрированному стереоскопическому изображению сцены определяет полярные координаты трех тестовых объектов (φ1, ψ1, R1; φ2, ψ2, R2; φ3, ψ3, R3) в системе OXYZ. Расстояния R1, R2, R3 вычисляются по параллактическому смещению объектов на стереоскопическом изображении по заложенному в комплекс 8 корреляционному алгоритму. На фиг.7 буквами  обозначены проекции векторов
обозначены проекции векторов  на плоскость OXY.
на плоскость OXY.
- Электронный комплекс 8 переводит вычисленные полярные координаты трех тестовых объектов в декартовы (x1, y1, z1; x2, y2, z2; x3, y3, z3) в системе OXYZ.
- Из бойницы при помощи дальномера (не из состава системы) определяют расстояния (R1б, R2б, R3б) до тестовых объектов и вводят их через интерфейсное устройство 10 в электронный комплекс 8. На фиг.7 буквами  обозначены проекции векторов
обозначены проекции векторов  на плоскость OXYZ.
на плоскость OXYZ.
- Используя угломерные приборы (не из состава системы), из бойницы определяют угол φ1б между вектором  (проекцией
(проекцией  на плоскость OXY) и
на плоскость OXY) и  угол ψ1б между проекциями векторов
угол ψ1б между проекциями векторов  и
и 
 на плоскость OYZ. Измеренные величины вводят через интерфейсное устройство 10 в электронный комплекс 8.
на плоскость OYZ. Измеренные величины вводят через интерфейсное устройство 10 в электронный комплекс 8.
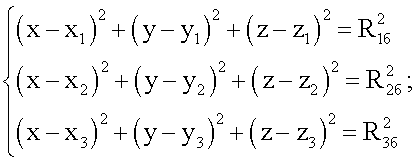
- Электронный комплекс 8 вычисляет координаты хб, уб, zб как решение системы уравнений:
углы φ0, ψ0 из систем уравнений:
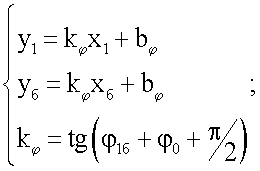

Углы φ, ψ, отсчитываемые по часовой стрелке от проекций вектора  и оси
и оси  , отрицательны.
, отрицательны.
Данные операции повторяют для каждой бойницы из состава системы.
Работа системы осуществляется следующим образом.
1. Боец контролирует окружающее пространство по видеоизображению, транслируемому с системы видеонаблюдения 9 на интерфейсное устройство 10 (монитор с сенсорным экраном).
При обнаружении цели (целей) на мониторе интерфейсного устройства 10 боец обозначает ее (их) на сенсорном экране нажатием (нажатиями) пальца (или специальным пером, поставляемым вместе с монитором). При этом длительное нажатие на сенсорный экран означает, что цель приоритетна, т.е. поражается в первую очередь. Именно по приоритетной цели идет прицеливание оружия 4 системы. Если на экране длительными нажатиями указываются несколько целей, то приоритетной считается последняя по времени.
2. Устройство 10 формирует сигнал об обнаружении цели (целей), содержащий ее (их) координаты на видеоизображении, а также приоритет, и передает его по проводной линии связи на электронный комплекс 8.
3. Электронный комплекс 8 выделяет область цели (целей) на видеоизображении и автоматически отслеживает ее (их) перемещение при помощи корреляционных алгоритмов обработки. В результате определяются текущие координаты цели (целей) на видеоизображении.
4. Одновременно с операциями по п.3 электронный комплекс 8 выполняет следующие действия.
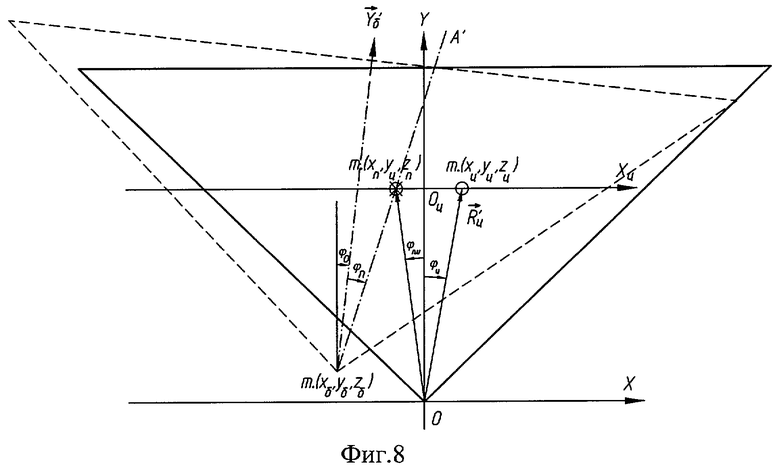
- По текущим координатам хц.и, уц.и (на видеоизображении) приоритетной цели вычисляет соответствующие углы φц, ψц ее пеленга и расстояние Rц (по параллактическому смещению на стереоскопическом изображении); после чего переводит полученные полярные координаты φц, ψц, Rц в декартовы хц, уц, zц, фиг.8  - проекция вектора
- проекция вектора  на плоскость OXY).
на плоскость OXY).
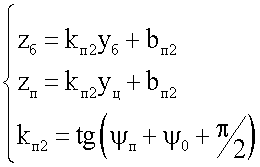
- Определяет координаты xп, zп текущей точки прицеливания, геометрическим местом которой является точка пересечения плоскости OцXцZц (координаты т. Оц (0, уц, 0); оси Xц, Zц параллельны осям X, Z соответственно) и прямой (А), совпадающей с центральной осью канала ствола оружия 4, фиг.8 (А' - проекция прямой А на плоскость OXY). Координаты xп, zп вычисляются как решение следующих систем уравнений:
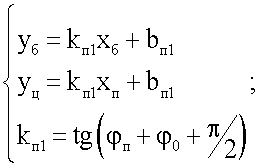
где φп - угол между вектором и проекцией А', измеряемый и постоянно передающийся датчиком 5 на комплекс 8, фиг.8;
ψп - угол между проекциями вектора  и прямой А на плоскость OYZ, измеряемый и постоянно передающийся датчиком 5 на комплекс 8.
и прямой А на плоскость OYZ, измеряемый и постоянно передающийся датчиком 5 на комплекс 8.
- Вычисляет текущее положение точки прицеливания (хп.и, уп.и) на видеоизображении, транслируемом бойцу на мониторе интерфейсного устройства 10. Для определения координат хп.и, уп.и (по известным xп, yц, zп,) предварительно вычисляются углы (φп.и, ψп.и наблюдения видеосистемой 9 точки прицеливания, фиг.8.
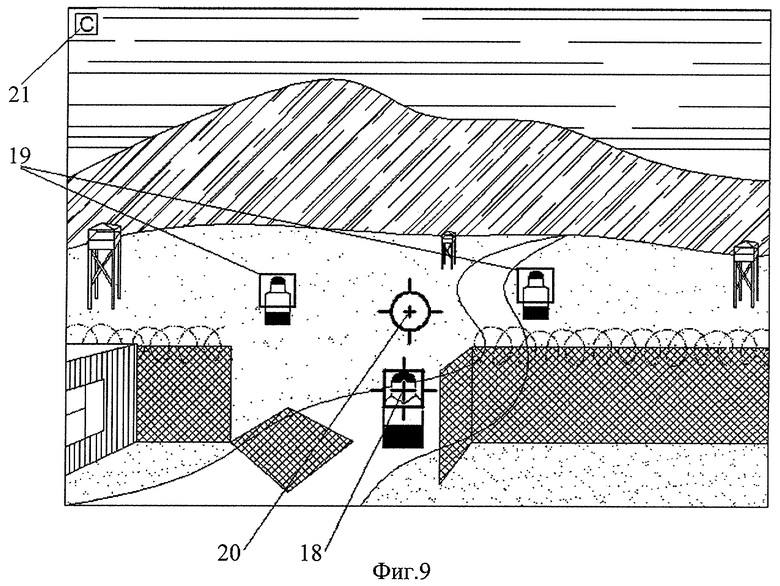
- Визуализирует на видеоизображении, транслируемом бойцу на мониторе интерфейсного устройства 10, точку текущего положения приоритетной (координаты хц.и, уц.и) и других целей, а также текущую точку прицеливания (координаты хп.и, уп.и). Данная операция происходит посредством интеграции в текущее видеоизображение (с системы видеонаблюдения 9) изображений маркеров точки положения приоритетной цели (квадрат с перекрестием - поз.18, фиг.9), маркеров точек положения других целей (квадраты - поз.19, фиг.9) и точки прицеливания (окружность с перекрестием - поз.20, фиг.9).
5. Боец, анализируя видеоизображение, производит прицеливание, вращая ствол оружия 4 в бойнице 1, и поражает приоритетную цель.
6. Для переключения системы на поражение другой цели выполняются следующие действия.
Если цель была ранее выбрана по пункту 1 описания работы системы, боец нажимает на сенсорном экране соответствующий маркер цели (поз.19), при этом происходит присвоение ей приоритета, после чего выполняются действия по пунктам 4, 5.
Если цель не была ранее выбрана, то выполняются действия по пунктам 1-5.
7. Для отмены отслеживания системой конкретной цели боец одновременно нажимает на сенсорном экране соответствующий маркер цели (поз.18, 19) и участок экрана, обозначенный пиктограммой (буква С в квадрате - поз.21, фиг.9); после чего интерфейсное устройство 10 формирует соответствующий сигнал на электронный комплекс 8.
8. Для одновременной отмены отслеживания системой всех целей боец два раза подряд нажимает на участок сенсорного экрана, обозначенный пиктограммой (поз.21); после чего интерфейсное устройство 10 формирует соответствующий сигнал на электронный комплекс 8, возвращающий систему в первоначальное состояние (пункт 1 описания работы).
Реализация предлагаемой системы вполне осуществима современными аппаратурными и программными средствами. Предпочтительно использование для защиты от проникновения на территории охраняемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЕДЕНИЯ ОГНЯ СТРЕЛКОВЫМ ОРУЖИЕМ | 2016 |
|
RU2644759C2 |
| БЫСТРОСЪЕМНЫЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2007 |
|
RU2362105C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ | 2008 |
|
RU2395054C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЕДЕНИЕМ СНАЙПЕРСКОГО ОГНЯ | 2011 |
|
RU2474782C1 |
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| Система автоматизированного управления стрелковым комплексом | 2024 |
|
RU2832853C1 |
| УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ РУЧНОГО ОГНЕСТРЕЛЬНОГО ОРУЖИЯ ПРИ СТРЕЛЬБЕ ИЗ-ЗА УКРЫТИЯ | 2009 |
|
RU2399011C1 |
| АВТОМАТ С ПОДСТВОЛЬНЫМ ГРАНАТОМЕТОМ КОНСТРУКЦИИ СИТОВА, УКОРОЧЕННЫЙ "АГСУ" | 1999 |
|
RU2186319C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| Устройство для ведения прицельного огня | 2019 |
|
RU2705603C1 |
Изобретение относится к средствам для безопасного ведения огня из закрытой позиции. Система содержит стационарную аппаратуру видеонаблюдения за полем боя в зоне предполагаемых боевых действий, выполненную с функциональной возможностью измерения расстояния до цели и удаленную от места ведения стрельбы из оружия, осуществляемой бойцом через бойницу. Бойница содержит поворотный элемент для установки в нем оружия или его части, например фрагмента ствола, с образованием бронезащиты, предпочтительно сплошной. Поворотный элемент бойницы взаимодействует с датчиком его углового положения, который, в свою очередь, соединен с электронным комплексом, осуществляющим обработку видеоизображений, выход которого подключен к интерфейсному устройству, передающему бойцу информацию о цели. Прицельная стрельба может вестись из стационарного укрытия или из транспортного средства. Технический результат - повышение уровня точности, повышение защищенности стрелка. 9 з.п. ф-лы, 9 ил.
1. Система для ведения прицельного огня из укрытия, содержащая стационарную аппаратуру видеонаблюдения за полем боя в зоне предполагаемых боевых действий, отличающаяся тем, что аппаратура видеонаблюдения, выполненная с функциональной возможностью измерения расстояния до цели (целей), удалена от места ведения стрельбы из оружия, осуществляемой бойцом через бойницу, содержащую поворотный элемент для установки в нем оружия с образованием бронезащиты, при этом поворотный элемент взаимодействует с датчиком его углового положения, соединенным с электронным комплексом, осуществляющим обработку видеоизображений, выход которого подключен к интерфейсному устройству, передающему бойцу информацию о цели.
2. Система для ведения прицельного огня из укрытия по п.1, отличающаяся тем, что в поворотный элемент вставляется и фиксируется в нем, образуя бронезащиту, часть оружия, например фрагмент ствола.
3. Система для ведения прицельного огня из укрытия по п.1 или 2, отличающаяся тем, что при установленном в поворотном элементе оружии или его части образуется сплошная бронезащита.
4. Система для ведения прицельного огня из укрытия по п.2, отличающаяся тем, что часть поворотного элемента, контактирующая с частью оружия выполнена в виде бронезащитной опоры-вставки.
5. Система для ведения прицельного огня из укрытия по п.1, отличающаяся тем, что она снабжена несколькими аналогичными местами ведения стрельбы из укрытия (укрытий), использующими информацию от единой аппаратуры видеонаблюдения за полем боя.
6. Система для ведения прицельного огня из укрытия по п.1, отличающаяся тем, что аппаратура видеонаблюдения содержит одну и более стереокамер.
7. Система для ведения прицельного огня из укрытия п.1, отличающаяся тем, что датчик углового положения поворотного элемента выполнен как оптоэлектронное устройство.
8. Система для ведения прицельного огня из укрытия по п.1, отличающаяся тем, что интерфейсное устройство выполнено в виде монитора с сенсорным экраном, предназначенным для выбора объекта прицеливания на текущем изображении окружающего пространства с аппаратуры видеонаблюдения и для демонстрации на данном изображении метки текущего положения прицеливания и метки, обозначающей выбранный объект.
9. Система для ведения прицельного огня из укрытия по п.1, отличающаяся тем, что место ведения стрельбы из укрытия может быть размещено на подвижном транспортном средстве, а сама система снабжена дополнительно датчиками положения и ориентации транспортного средства, соединенными с электронным комплексом.
10. Система для ведения прицельного огня укрытия по п.1, отличающаяся тем, что аппаратура видеонаблюдения соединена с электронным комплексом радиоканалом.
| RU 2005127400 A, 10.03.2007 | |||
| Пневматическая диафрагма для граммофона | 1929 |
|
SU13838A1 |
| US 5347910 A, 20.09.1994 | |||
| WO 9616308 A1, 30.05.1996. | |||

