Изобретение относится к оптическим средствам для наблюдения за подводным пространством и обнаружения объектов в нем. Изобретение может применяться в промышленности, например, для своевременного предупреждения попадания в зону водозабора насосной станции посторонних предметов, а также в природоохранных целях, например, для поиска утечек веществ из кораблей, стоящих на рейде, в терминалах наливных портов, у пирсов.
Промышленностью ряда стран освоен выпуск разнообразных технических средств для проведения наблюдения в подводной среде. В частности, для наблюдения подводного пространства применяют погружные видеокамеры фирмы Sony. Однако при данном способе наблюдения сложно организовать контроль подводного пространства с автоматической селекцией ложных объектов (рыб и других биологических видов, проплывающих перед объективом видеокамеры) вследствие:
- невозможности точного определения расстояния до объекта при неизвестных его размерах;
- невозможности точного определения размеров объекта при неизвестном расстоянии до него.
В качестве прототипа заявляемого изобретения выбран способ обнаружения объектов под водой с улучшенной видимостью, описанный в патенте США №6348942 от 09.11.98, опубл. 19.02.2002, МПК H04N 07/18.
Сущность известного способа заключается в регистрации стереоскопического изображения контролируемого участка подводного пространства непосредственно в водной среде. Стереоскопическое изображение регистрируют стереокамерой в водозащищенном исполнении, образованной двумя идентичными однонаправленными видеокамерами, установленными на одной линии на некотором небольшом расстоянии относительно друг друга. Стереоскопическое изображение позволяет правильно оценить размеры и расстояние до интересующего объекта. Одну стереокамеру устанавливают на носовой части смотрового судна, вторую - на кормовой. Осуществляют также подсветку окружающей водной среды с помощью лазеров, излучающих зелено-голубой свет и размещенных в тех же водозащитных корпусах, что и видеокамеры.
Основной недостаток прототипа заключается в невозможности обеспечения одномоментного наблюдения и обнаружения объектов во всем контролируемом подводном пространстве, поскольку поле обзора каждый момент времени ограничено, а смотровое судно перемещается в заданном направлении с лимитированной скоростью. Ограниченная область одномоментного обзора может значительно уменьшить вероятность обнаружения интересующего объекта.
Задача заключается в создании способа эффективного контроля протяженных и площадных подводных зон с сохранением преимуществ, обеспечиваемых стереоскопической съемкой.
Поставленная задача решается следующим образом.
В способе обнаружения объектов под водой, согласно которому регистрируют непосредственно в водной среде стереоскопические изображения контролируемого подводного пространства, при этом осуществляют подсветку контролируемого пространства и анализируют полученные последовательные изображения, согласно изобретению одномоментно регистрируют стереоскопические изображения из нескольких пространственно распределенных точек, расстояния между которыми и направления наблюдения выбирают из условия обеспечения максимально возможной сплошности обзора контролируемого пространства, осуществляют анализ всех полученных в каждый данный момент времени стереоскопических изображений, при этом выполняют подсветку границ контролируемого пространства и/или охраняемого объекта и/или области в его непосредственной близости и определяют посторонние объекты по их теням от источников света на многоракурсных изображениях, полученных за пределами подсвеченной области.
Технический результат обусловлен тем, что увеличенное количество одномоментно регистрируемых многоракурсных стереоскопических изображений обеспечивает формирование сплошной картины контролируемого подводного пространства в каждый заданный момент времени, что позволяет оценивать ситуацию по всей контролируемой территории, своевременно обнаруживая интересующие объекты.
Кроме того, для увеличения эффективности обнаружения объектов при контролировании значительного по площади подводного пространства в условиях замутненности водной среды или недостаточности освещения, осуществляют подсветку границ контролируемого пространства и определяют посторонние объекты по их теням от источников света на многоракурсных изображениях, полученных за пределами подсвеченной области. Для этих же целей осуществляют подсветку охраняемого объекта и/или области в его непосредственной близости и определяют посторонние объекты по их теням на многоракурсных изображениях подсвеченной области, полученных за ее пределами. При такой подсветке за счет рассеяния света в водной среде создается освещенный слой. Объекты, проплывающие между освещенным слоем воды и расположенной вне подсвечиваемой области аппаратурой, регистрирующей изображения, отбрасывают в сторону аппаратуры тень, которая на полученных изображениях выглядит как область затенения освещенного слоя. В результате облегчается поиск объектов на зарегистрированных изображениях вследствие их обнаружения по перепаду яркости (тени) в подсвечиваемом слое.
Кроме того, для обеспечения сплошности наблюдаемой картины контролируемого подводного пространства, в условиях пересеченного рельефа дна, точки наблюдения располагают на разной глубине.
Кроме того, для обеспечения большей дальности обнаружения интересующих объектов, в условиях снижения видимости в воде, подсветку производят в импульсном режиме и синхронизируют ее с регистрацией изображений, в результате чего увеличивается поток света от устройств подсветки (импульсных вспышек) в момент регистрации кадров.
Кроме того, применяют подсветку в разных спектральных диапазонах и при анализе сравнивают и/или комбинируют изображения, полученные в разных спектральных диапазонах. Это обеспечивает лучшее обнаружение объекта с неизвестными спектральными отражательными характеристиками, т.к. такая подсветка позволяет получить на регистрируемых изображениях максимальный перепад в яркости между объектами и фоном, что увеличивает контрастность изображений объектов. А сравнение и/или комбинирование изображений, снятых с подсветкой в разных спектральных диапазонах, позволяет выбрать наиболее информативные из них.
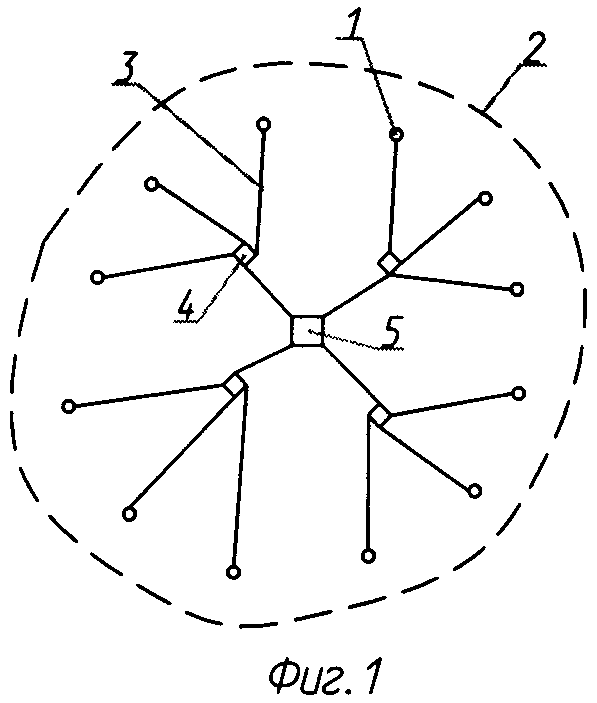
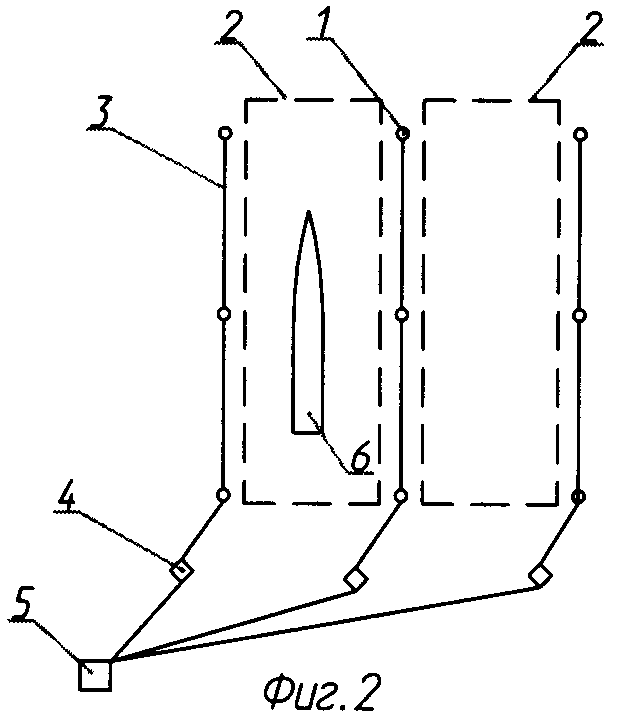
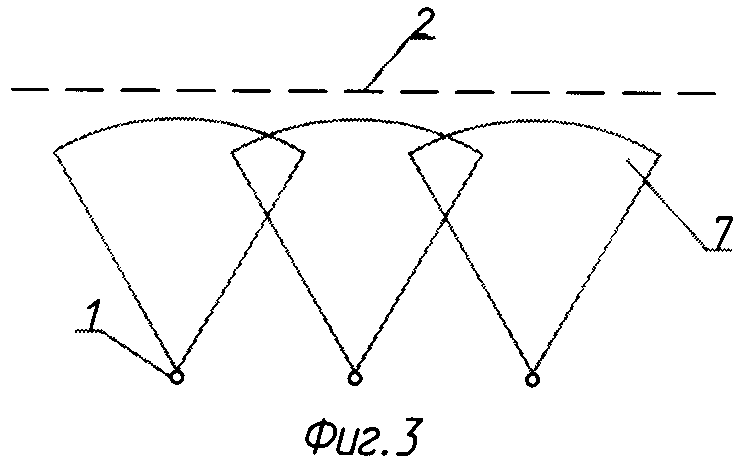
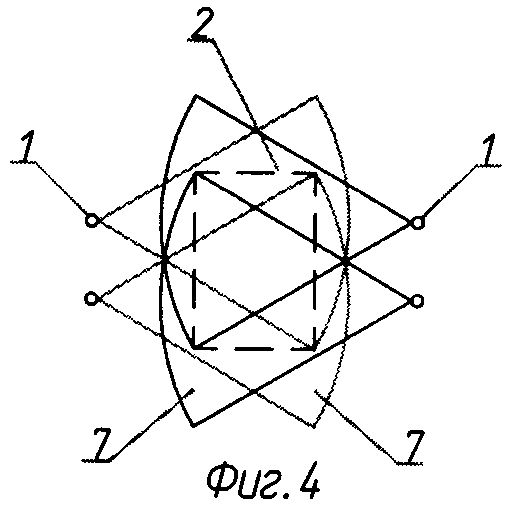
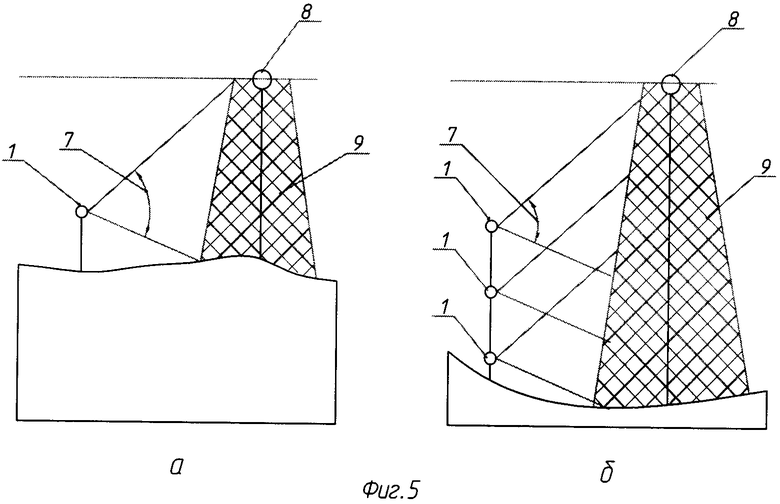
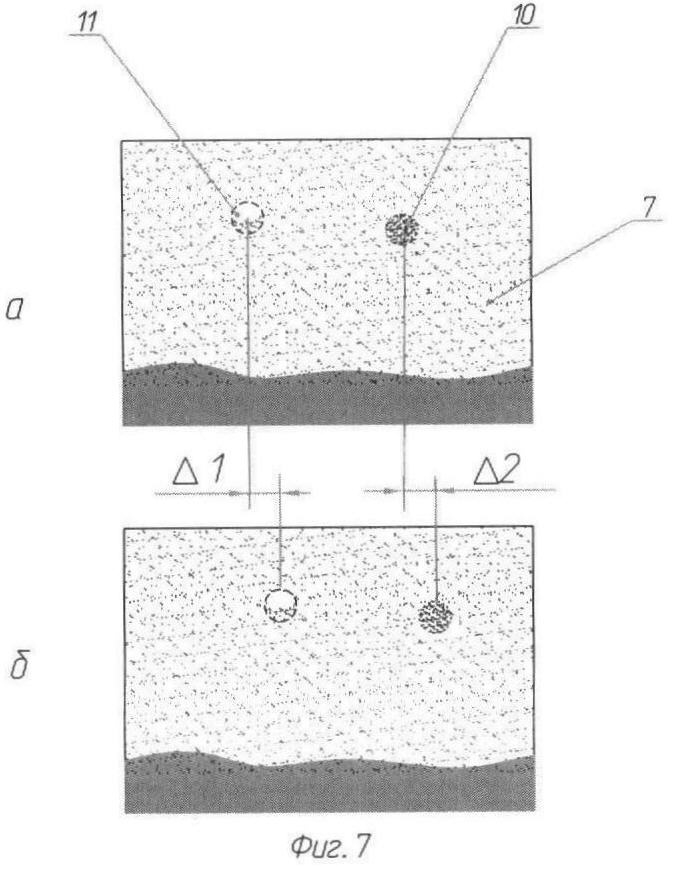
На фиг.1 схематично показано пространственное распределение точек 1 наблюдения вдоль границы 2 контролируемого подводного пространства, где каждая точка 1 наблюдения с помощью оптоволоконной линии 3 связи соединена через ретранслятор 4 с центральным пунктом управления 5. На фиг.2 схематично показано распределение точек 1 по площади контролируемого подводного пространства (например, стоянки корабля 6), ограниченного границей 2 (пунктирная линия), где также все точки 1 наблюдения соединены через оптоволоконные линии 3 связи и ретрансляторы 4 с центральным пунктом наблюдения 5. На фиг.3 условно представлена область обзора границы контролируемого пространства из точек наблюдения 1, формируемая секторами 7, а на фиг.4 - область обзора площади контролируемого пространства из точек наблюдения 1, формируемая аналогичными секторами. На фиг.5 а, б условно показаны два среза водной толщи на участках контролируемого подводного пространства с разными глубинами с использованием источников подсветки, размещенных на буях 8 и формирующих в водной среде подсвечиваемые области 9. На фиг.6 приведен срез водной толщи на контролируемом участке площадной подводной зоны (стоянки кораблей 6), где показаны посторонние объекты 10 и 11, попавшие в зону наблюдения. На фиг.7 а, б показана стереоскопическая пара изображений с зарегистрированными на них интересующими объектами 10 и 11.
Способ реализуется следующим образом.
На первом этапе обнаружения интересующих объектов в водной среде производится одномоментная регистрация многоракурсных стереоскопических изображений контролируемого подводного пространства из нескольких пространственно распределенных точек 1. Точки в зависимости от ставящейся задачи мониторинга могут располагаться:
- вдоль границы 2 контролируемого подводного пространства (фиг.1), обеспечивая мониторинг протяженной подводной зоны (например, периметра границы);
- по площади контролируемого подводного пространства (фиг.2), обеспечивая мониторинг площадной подводной зоны, охватываемой границей 2 (например, стоянки корабля 6).
Расстояние между точками 1 выбирают из условия обеспечения максимально возможной сплошности обзора контролируемого пространства. На фиг.3 непрерывность наблюдения границы 2 контролируемого пространства показана перекрывающимися секторами 7 обзора используемого оборудования, устанавливаемого в точках 1 и регистрирующего стереоскопические изображения. На фиг.4 секторами 7 показана сплошность наблюдения площади контролируемого пространства.
В условиях пересеченного рельефа дна, для обеспечения непрерывности наблюдения контролируемого пространства, точки 1 могут располагаться на разной глубине. На фиг.5 а, б изображены два среза водной толщи с разной глубиной, где показано вертикальное расположение точек 1 и секторов 7.
При недостаточном освещении контролируемого подводного пространства для автоматического обнаружения в нем интересующих объектов организуют его подсветку. Такую подсветку осуществляют установкой приборов-осветителей на буи 11 (фиг.5а, б) или непосредственно на охраняемый объект 6 (фиг.6), формируя подсвечиваемые области 9.
Для увеличения мощности подсветки приборы-осветители должны работать в импульсном режиме с обеспечением синхронизации подсветки с регистрацией кадров.
Также для лучшего обнаружения объекта с неизвестными спектральными отражательными характеристиками должна применяться подсветка в разных спектральных диапазонах, которая позволяет получить на регистрируемых изображениях максимальный перепад в яркости между объектами и фоном, т.е. получить контрастные изображения объектов. Однако на подсвечиваемых изображениях регистрируемые образы объектов могут быть либо пересвеченными, либо в виде теневого контура. Вследствие этого с изображениями, зарегистрированными с подсветкой, чередуются изображения, зарегистрированные без подсветки.
При контролировании значительного по площади подводного пространства в условиях замутненности водной среды или недостаточности освещения производится подсветка преимущественно границ контролируемого пространства, при этом должно соблюдаться условие сплошности подсветки по границе. На фиг.5 а, б на срезе водной толщи показаны подсвечиваемые области 9, расположенные на границе 2 контролируемого пространства. При больших размерах контролируемого пространства и потребности в наблюдении только охраняемого (осматриваемого) объекта подсветка должна производиться с самого охраняемого объекта и/или из области в его непосредственной близости. Аналогично должно соблюдаться условие сплошности подсветки. На фиг.6 на срезе водной толщи показаны подсвечиваемые области 9, охватывающие подводную часть охраняемого объекта (корабля 6, стоящего на рейде в контролируемой области) и пространство в ее непосредственной близости. В обоих случаях при организации данной подсветки наблюдение должно вестись извне пределов подсвечиваемой области (фиг.5 а, б и фиг.6). Эффект от данных способов регистрации изображений заключается в следующем. За счет рассеяния света в водной среде создается освещенный слой. Объекты, проплывающие между освещенным слоем воды и аппаратурой, регистрирующей изображения, отбрасывают в сторону аппаратуры тень, которая на полученных изображениях выглядит как область затенения освещенного слоя. На фиг.6 данный объект показан под позицией 10, а на фиг.7а, б представлен его образ (под той же позицией) в виде тени на изображении освещенного слоя 9, выступающем в роли яркого экрана (светлого заднего фона). В результате облегчается поиск объектов на зарегистрированных изображениях вследствие их обнаружения по перепаду яркости (теням) в подсвечиваемом слое. Образ постороннего объекта 11, попавшего в подсвеченную зону 9, регистрируется непосредственно от самого объекта.
На втором этапе обнаружения интересующих объектов производят анализ полученных многоракурсных стереоскопических изображений.
На каждой стереопаре изображений выделяют фрагменты, соответствующие зарегистрированным образам объектов. Для выделения данных фрагментов может применяться корреляционный поиск, соотносящий два образа соответствующего объекта на бесфоновом изображении, являющемся разностью двух изображений, входящих в анализируемую стереопару, при этом поиск производится как подвижка в направлении параллактического смещения. Одновременно для каждого объекта вычисляется параллактическое смещение Δi его образов на стереопаре, фиг.7. Для упрощения процесса локализации образов объектов в последовательности изображений, снятых чередованием с подсветкой и без нее, образы объектов сначала находятся по их теням на изображениях, полученных с подсветкой, после чего выделенные области соотносят с такими же областями на изображениях, снятых в последующий момент времени в том же ракурсе (из той же точки наблюдения), но без подсветки.
После локализации на зарегистрированных изображениях образов объектов для каждого данного объекта производится оценка его геометрических размеров и удаленности от точки наблюдения, из которой был зарегистрирован его образ. Расстояние Ri до объекта можно оценить исходя из параллактического смещения Δi его образов на стереопаре и известных параметров регистрирующей аппаратуры (фокусного расстояния f и стереоскопического базиса а) по формуле Ri=a·f/Δi. Оценка реальных размеров наблюдаемого объекта производится исходя из вычисленной величины Di, равной произведению расстояния Ri и углового размера объекта, определяемого по выделенному зарегистрированному образу объекта.
Производится селекция обнаруженных объектов по значениям Ri и Di. Объекты, находящиеся дальше заданного расстояния Rmax и имеющие оцениваемые размеры, меньшие, чем Dmin, отбрасываются из рассмотрения. Отбрасывание объектов, находящихся на расстояниях, превышающих Rmax, производится с целью устранения вводящих в заблуждение бликов на водной поверхности, а также предметов на поверхности дна. Оставшиеся объекты считаются интересующими.
Выделенные образы объектов запоминаются для дальнейшей идентификации по ним интересующих объектов. Идентификация проводится зрительно оператором по представляемым ему образам объектов. Кроме того, для улучшения идентификации интересующего объекта возможно сравнение зарегистрированных образов, снятых с разной спектральной подсветкой, и/или их комбинирование в единый более информативный мультиспектральный портрет. Комплекс, реализующий данный способ, может состоять из регистрирующей аппаратуры, расположенной в точках 1 ведения наблюдения, соединенной по оптоволоконным линиям 3 связи (одновременно являющимся линиями электропитания регистрирующей аппаратуры) через узлы ретрансляторы 4 с центральным пунктом 5 управления, обрабатывающим все полученные изображения и передающим их оператору для визуальной идентификации интересующих объектов (фиг.1, 2). Регистрирующая аппаратура может представлять собой стереокамеры, каждая из которых состоит из двух идентичных видеокамер, разнесенных друг относительно друга на расстояние, равное стереоскопическому базису а (выбираемому из условия необходимой максимальной дальности обнаружения интересующих объектов), и ориентированных в одном направлении при условии параллельности главных оптических осей их объективов. Устройства подсветки также должны быть соединены с пунктом управления 5 сигнальными линиями связи. При этом устройства подсветки могут представлять собой мультиспектральные импульсные источники, размещаемые на буях 8 (фиг.5) или на охраняемом объекте 6 (фиг.6).
Реализация предлагаемого способа является вполне возможной, т.к. на сегодняшний день промышленностью освоены все основные компоненты комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2013 |
|
RU2535631C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ | 2008 |
|
RU2383901C2 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ОБЪЕКТОВ НА НЕОДНОРОДНОМ УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2390039C2 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЁННОМ ФОНЕ | 2013 |
|
RU2552123C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2007 |
|
RU2356066C2 |
| СИСТЕМА ДЛЯ ВЕДЕНИЯ ПРИЦЕЛЬНОГО ОГНЯ ИЗ УКРЫТИЯ | 2008 |
|
RU2403526C2 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ОБЪЕКТА СО СТОРОНЫ ВЕРХНЕЙ ПОЛУСФЕРЫ | 2020 |
|
RU2755951C1 |
| Способ активной защиты объекта со стороны верхней полусферы от множественных атак БПЛА | 2022 |
|
RU2784092C1 |
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
Способ заключается в том, что регистрируют непосредственно в водной среде стереоскопические изображения контролируемого подводного пространства, при этом осуществляют подсветку контролируемого пространства и анализируют полученные последовательные изображения. При реализации способа одномоментно регистрируют стереоскопические изображения из нескольких пространственно распределенных точек, расстояния между которыми и направления наблюдения выбирают из условия обеспечения максимально возможной сплошности обзора контролируемого пространства. Осуществляют анализ всех полученных в каждый данный момент времени стереоскопических изображений, при этом выполняют подсветку границ контролируемого пространства и/или охраняемого объекта и/или области в его непосредственной близости. Посторонние объекты определяют по их теням от источников света на многоракурсных изображениях, полученных за пределами подсвеченной области. Технический результат заключается в обеспечении эффективного контроля протяженных и площадных подводных зон с сохранением преимуществ, обеспечиваемых стереоскопической съемкой. 3 з.п. ф-лы, 7 ил.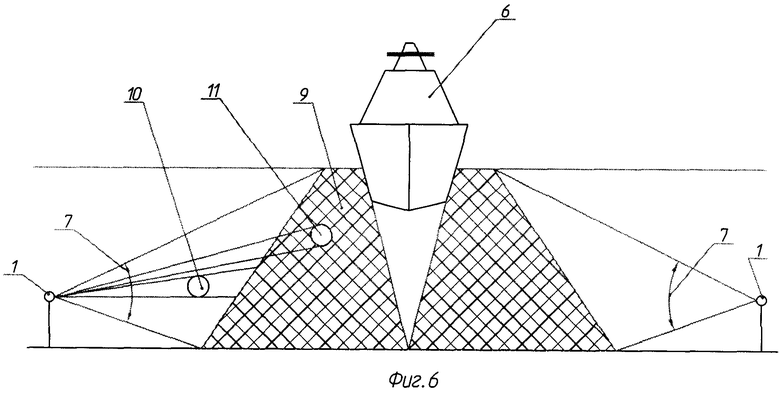
1. Способ обнаружения объектов под водой, согласно которому регистрируют непосредственно в водной среде стереоскопические изображения контролируемого подводного пространства, при этом осуществляют подсветку контролируемого пространства, и анализируют полученные последовательные изображения, отличающийся тем, что одномоментно регистрируют стереоскопические изображения из нескольких пространственно распределенных точек, расстояния между которыми и направления наблюдения выбирают из условия обеспечения максимально возможной сплошности обзора контролируемого пространства, осуществляют анализ всех полученных в каждый данный момент времени стереоскопических изображений, при этом выполняют подсветку границ контролируемого пространства и/или охраняемого объекта и/или области в его непосредственной близости и определяют посторонние объекты по их теням от источников света на многоракурсных изображениях, полученных за пределами подсвеченной области.
2. Способ по п.1, отличающийся тем, что точки наблюдения располагают на разной глубине.
3. Способ по п.2, отличающийся тем, что подсветку производят в импульсном режиме и синхронизируют ее с регистрацией изображений.
4. Способ по п.3, отличающийся тем, что применяют подсветку в разных спектральных диапазонах и при анализе сравнивают и/или комбинируют изображения, полученные в разных спектральных диапазонах.
| US 6348942 В1, 19.02.2002 | |||
| US 2008089556 A1, 17.04.2008 | |||
| US 2006008137 A1, 12.01.2006 | |||
| US 2003231788 A1, 18.12.2003 | |||
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2003 |
|
RU2260847C2 |

