Область техники, к которой относится изобретение
Настоящее изобретение относится к способу передачи сигналов.
Уровень техники
Существующие способы передачи сигналов, которые применяют для получения информации от скважинного датчика, например в нефтегазодобывающей промышленности, основаны на передаче сигналов по соответствующим проводам. Такие провода должны проходить по всей длине скважины, в которой расположен датчик. Поскольку прокладка скважинных проводов связана с существенными расходами, для уплотнения сигналов скважинных датчиков желательно использовать другие провода, уже проложенные в стволе скважины.
Ранее было предложено использовать трехфазные провода, применяемые для питания забойных двигателей, находящихся в стволе скважины. Особенность трехфазного питания в симметричном режиме состоит в том, что после прохождения через электрическую нагрузку (такую как двигатель) провода можно заземлить в нейтральной точке. При отсутствии неисправностей трехфазного питания напряжение в нейтральной точке остается практически нулевым относительно потенциала окружающей земли или корпуса. В этом случае, используя три индуктивные нагрузки, можно сконструировать на поверхности зеркальное отражение нейтральной точки и таким образом можно создать проводящий канал между нейтральными точками, находящимися на поверхности и в скважине, при этом сигнал обратной связи идет через обсадную или насосно-компрессорную колонну, находящиеся в стволе скважины. По этой цепи можно пересылать сигналы.
Однако в случае неисправности трехфазного питания (короткого замыкания) скважинная нейтральная точка может оказаться в условиях действия значительных напряжений. Соответственно, до соединения с сигнализирующей контрольно-измерительной аппаратурой в цепь последовательно с нейтральной точкой включают скважинную катушку индуктивности. В сочетании со скважинным конденсатором образуется низкочастотный фильтр, который ограничивает проникновение переменных токов высокого напряжения, питающих забойный двигатель. Это сочетание катушки индуктивности и конденсатора ограничивает скорость изменения передаваемого сигнала, а значит, и полосу пропускания данного канала передачи. Как правило, с учетом предполагаемого в данном случае напряжения необходима такая индуктивность, при которой минимальное время установления сигнала (успокоения колебательной системы) составляет порядка до одной секунды. Иными словами, после скачка приложенного напряжения в скважинной нейтральной точке напряжение в наземной нейтральной точке будет оставаться нестабильным в течение примерно половины секунды, прежде чем оно установится на новом уровне. Для считывания этого нового уровня напряжения необходимо подождать в течение примерно одной секунды. До этого момента напряжение, измеряемое в наземной нейтральной точке, будет непостоянным в результате влияния катушки индуктивности.
В известных системах передачи сигналов, таких как система, описанная в патенте US-A-5539375, для кодирования информации используют уровни напряжения или тока, однако недостатком данных способов является длительное время установления сигнала, обусловленное упомянутыми катушками индуктивности, расположенными на пути прохождения сигнала. Кроме того, электрические помехи, создаваемые мощностью насоса, могут вызывать отклонения уровней тока или напряжения, что ухудшает качество сигнала в случае применения аналоговых методов кодирования или снижает скорость передачи данных в случае применения цифровых методов кодирования.
Кроткое изложение сущности изобретения
Задачей, на решение которой направлено настоящее изобретение, является преодоление этого недостатка и создание системы передачи сигналов, способной разрешить проблему крайне низкого качества канала передачи, обеспечивающей приемлемую полосу пропускания и в значительной мере ослабляющей влияние электрических помех.
Таким образом, в изобретении предлагается система передачи электрических сигналов, содержащая модулятор, демодулятор и канал передачи сигналов от модулятора к демодулятору, где модулятор выполнен с возможностью приема информации и кодирования этой информации в переменном сигнале с повторяющимися нарастающими и спадающими фронтами, причем кодирование осуществляется промежутками времени между следующими друг за другом нарастающими и спадающими фронтами, а демодулятор выполнен с возможностью предварения информационного сигнала опорным сигналом известной длительности, а также детектирования этого опорного сигнала и вычисления на его основе погрешности калибровки.
Очевидно, что измерение может осуществляться между нарастающим фронтом (перепадом) сигнала и следующим за ним спадающим фронтом или же между спадающим фронтом и следующим за ним нарастающим фронтом.
Демодулятор может регистрировать погрешность калибровки и вычитать ее из последующих информационных сигналов. Тогда при отрицательной погрешности калибровки значение выходного сигнала, безусловно, увеличится. Было установлено, что погрешности в сигналах данного типа, а именно в сигналах широтно-импульсной модуляции с узкой полосой частот, передаваемых по индуктивным каналам, склонны иметь систематический характер, поскольку нарастающие и спадающие фронты не являются резкими, а имеют отчетливо выраженный градиент. В результате пороговый детектор выдает результат, чувствительный к выбранному порогу, и этот эффект имеет преобладающее влияние на ошибку или погрешность сигнала. Однако, поскольку профиль нарастающих и спадающих фронтов по существу не зависит от промежутка времени между ними, то такая погрешность, связанная с пороговым значением, является систематической в том смысле, что она имеет по существу одинаковое абсолютное значение вне зависимости от длительности (ширины) импульса. Следовательно, ее можно исправить путем соответствующего прибавления или вычитания.
В другом варианте демодулятор может корректировать этот порог (пороговое значение) для будущих сигналов на основе погрешности калибровки. Демодулятор может сохранять образ опорного сигнала и принимать порог, для которого погрешность калибровки по существу равна нулю либо он может корректировать порог приблизительным образом и проверить это новое значение при поступлении следующего опорного сигнала.
Эти приемы могут сочетаться, к примеру, в системе, которая получает опорный сигнал, замечает ошибку и использует ее в качестве поправки применительно к последующим информационным сигналам, а затем, до поступления следующего опорного сигнала, корректирует порог, устанавливая его новое значение. Таким образом, в отношении информационных сигналов, следующих между опорными сигналами, предпринимается коррекция ошибок, но до поступления следующего опорного сигнала и до следующей итерации пороговое значение устанавливается более точно.
Канал передачи может быть неидеальным, например индуктивным, что не ухудшает эффективности такой системы, хотя и накладывает ограничения на доступную полосу пропускания. Система способна посылать распознаваемые сигналы по кабелю трехфазного питания. Подключенное к кабелю оборудование в общем случае создает шум, накладывающийся сверху на полезный сигнал, но система способна решить эту проблему.
Изобретение особенно подходит для применения в нефтегазодобывающей промышленности, для передачи информации, поступающей от скважинных или глубинных датчиков. Сигналы, выдаваемые такими датчиками, проходят по протяженному каналу передачи данных, где часто применяются кабели, оптимизированные не по условию получения идеальных электрических характеристик, а для обеспечения работоспособности в жестких условиях окружающей среды.
Ведя передачу в заданной последовательности, в передачу можно последовательно включить несколько источников данных. Таким образом, полный пакет данных может, к примеру, включать в себя опорный сигнал, сигнал давления и затем сигнал температуры.
Данные можно подвергать цифровому кодированию с использованием т.н. "бинов" или ячеек, т.е. определенного интервала промежутков времени, которые соответствуют определенному значению входной информации. Например, конкретный результат измерений на выходе измерительного преобразователя можно кодировать в виде любого сигнала в интервале между 410 и 414 мс. В данном случае система будет стремиться послать сигнал 412 мс, и при условии, что частота повторения ошибок составляет менее 2 мс, а предпочтительно - менее 1 мс, принятый на поверхности сигнал не будет содержать неопределенности. Все бины могут быть одинаковой ширины или же иметь переменную ширину, чтобы обеспечивать максимальную точность системы в диапазоне обычных рабочих параметров.
Можно также использовать "двухбиновую" схему кодирования. Например, если желательно передать некоторое значение, к примеру 1057, первый сигнал может содержать указание на то, что передаваемое значение находится в интервале значений от 1000 до 1999, а второй сигнал - указывать 57, в отличие от 56 или 58. При сложении сигналов на выходе получаем искомое значение - 1057. При этом размеры бинов используются более эффективно. Схему кодирования можно организовать таким образом, чтобы сначала шел оцифрованный сигнал (как указано выше), указывающий грубый или приблизительный уровень (например, 1000, 2000, 3000 и т.д.) передаваемого значения, за которым следует другой сигнал (аналоговый или цифровой) для более точного или высокого разрешения. Это может принести значительную выгоду. Если, например, "шум" в системе передачи сигналов составляет 1 мс, а промежуток времени между фронтами измеренного сигнала колеблется от 1 до 2 секунд в зависимости от измеряемого сигнала, то результаты измерений в пределах от 0 до 10000 фунт на кв. дюйм будут кодироваться во временном окне от 0 до 1000 мс при шуме 1 мс. В результате шум составит 10 фунт на кв. дюйм. Если же сначала передать приблизительный уровень, указывающий на грубый интервал (0-999, 1000-1999 и т.д.), то последующему аналоговому сигналу достаточно перекрывать диапазон 0-1000 фунтов на кв. дюйм, а величина шума, следовательно, составит 1 фунт на кв. дюйм.
Изобретение предлагает также дальнейшее усовершенствование в плане проектирования подобных систем. Объектом изобретения является также система передачи электрических сигналов, содержащая модулятор, выполненный с возможностью приема информации от множества источников и кодирования этой информации в виде сигнала широтно-импульсной модуляции, причем информация от множества источников кодируется в виде длительностей последовательных импульсов, информация по меньшей мере от одного датчика кодируется таким образом, чтобы увеличение ее значения соответствовало увеличению длительности импульса, а информация по меньшей мере от одного другого датчика кодируется таким образом, чтобы увеличение ее значения соответствовало уменьшению длительности импульса.
Таким образом, общее время, необходимое для передачи обоих сигналов от двух или более датчиков, может быть в основном постоянным. Это в особенности касается случая, когда датчики измеряют взаимосвязанные параметры, например один и тот же параметр, или когда он спарены для резервирования. При повышении давления или температуры один датчик будет выдавать более долгий импульс, а другой датчик - более короткий импульс. Следовательно, общее время передачи сигналов от обоих датчиков будет в основном одинаковым. Этот полезно с той точки зрения, что если положить длительность импульсов переменной в пределах 1 и 2 секунд, то изобретение исключает возможность разброса времени обнаружения сигналов в интервале от 2 до 4 секунд. Взамен устройство может быть выполнено таким образом, чтобы работать с относительно стабильным временем обнаружения сигналов, равным 3 секундам.
Этот дополнительный аспект изобретения может использоваться в сочетании с вышеописанным аспектом, предусматривающим кодирование информации промежутком времени между нарастающим фронтом и спадающим фронтом. Однако такое сочетание не является существенным, обязательным, и данный аспект равным образом применим в отношении других методов кодирования, например предусматривающих кодирование информации промежутком времени между нарастающим фронтом и последующим нарастающим фронтом. Пример осуществления метода, упомянутого последним, приведен в более ранней заявке GB 0326055.1, поданной 7 ноября 2003 г.
Краткое описание чертежей
Далее в качестве примера приведен вариант осуществления настоящего изобретения, рассмотренный со ссылкой на приложенные чертежи, на которых показано:
на фиг.1 - система скважинной контрольно-измерительной аппаратуры,
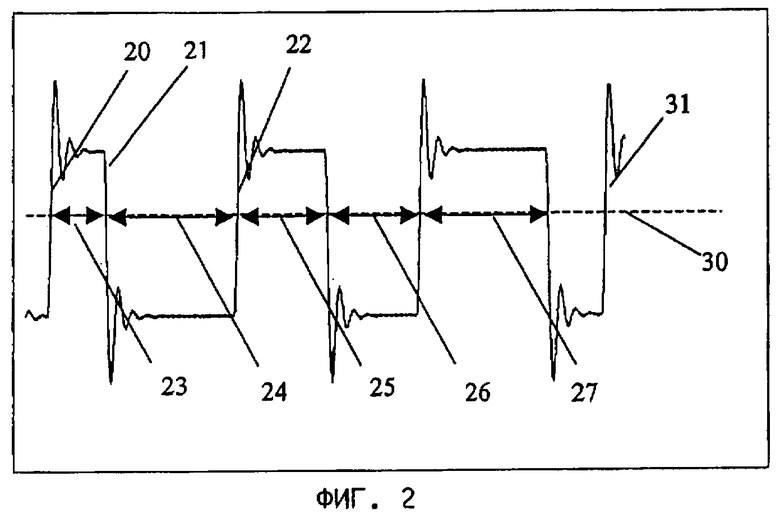
на фиг.2 - сигнал, поступивший от системы скважинной контрольно-измерительной аппаратуры,
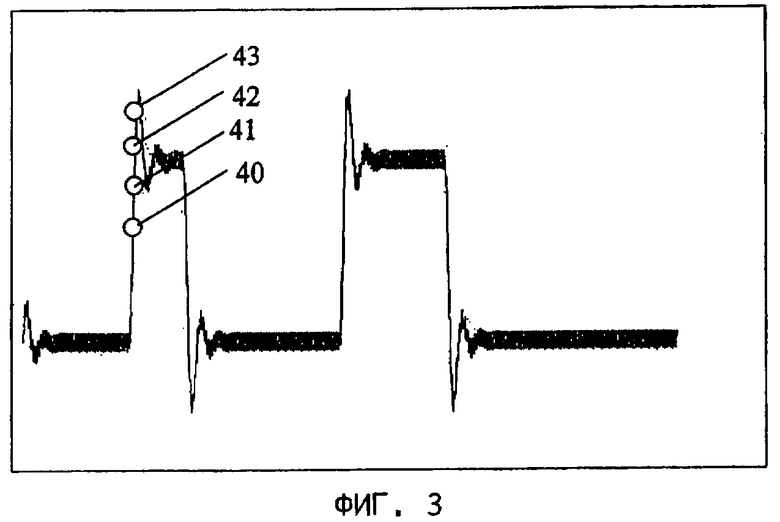
на фиг.3 - влияние шума на полученный сигнал.
Подробное описание вариантов осуществления
На фиг.1 показан забойный двигатель 2, соединенный трехфазным силовым кабелем 13 с наземным изолированным источником 1 питания. Эту систему используют, чтобы способствовать подъему нефти в скважине.
Скважинный прибор, состоящий из скважинного электронного оборудования 7, датчиков 12, конденсатора 11, зенеровского диода 10 и скважинной катушки 9 индуктивности, подключен к нейтральной точке 8 забойного двигателя 2.
Наземное электронное оборудование 5 подключено к находящейся на поверхности нейтральной точке 6, образованной объединением трех наземных катушек 3 индуктивности. Наземные катушки 3 индуктивности электрически связаны с кабелем 13 забойного двигателя.
Таким образом, скважинное электронное оборудование 7 способно взаимодействовать с наземным электронным оборудованием 5 через скважинную катушку 9 индуктивности, забойный двигатель 2, кабель 13 и наземные катушки 3 индуктивности.
Наземное электронное оборудование 5, используя известные технологии, выдает стабильное напряжение постоянного тока, а скважинное электронное оборудование 7, также используя известные технологии, потребляет регулируемый ток. Потребление тока находится под контролем электронного оборудования 7. Изменения в потреблении тока приводят к изменениям тока, снимаемого с наземного электронного оборудования, которое таким образом следит за током. Соответственно, устанавливается линия связи.
Скважинное электронное оборудование 7 связано с датчиками 12. Показания этих датчиков 12 преобразуются в цифровую форму скважинным электронным оборудованием 7, которое затем кодирует эти данные, модулируя электрический ток. Модулированный ток, в свою очередь, принимается наземным электронным оборудованием 5.
Типичный токовый сигнал, генерируемый скважинным электронным оборудованием 7 и принимаемый наземным электронным оборудованием 5, изображен на фиг.2, на которой за положительным (нарастающим) фронтом 20 через временной интервал (промежуток времени) 23 следует отрицательный (спадающий) фронт 21. Аналогичным образом, за отрицательным фронтом 21 через следующий временной интервал 24 следует еще один положительный фронт 22. Затем идут следующие временные интервалы 25, 26 и 27, определяемые аналогичным образом. Наземное электронное оборудование 5 измеряет временные интервалы 23, 24, 25, 26 и 27, задавая пороговый уровень (показан пунктирной линией 30). Форма импульсной последовательности сигнала, в которой положительный фронт 31 означает начало следующей последовательности, постоянно повторяется. Информация отдатчиков 12 кодируется временными интервалами 24, 25, 26 и 27.
Временной интервал 23, задаваемый скважинным электронным оборудованием 7, всегда равен 0,75 секунды. Ввиду индуктивного характера канала передачи между скважинным электронным оборудованием 7 и наземным электронным оборудованием 5 положительный фронт 20 нарастает не мгновенно, а значит, имеет определенный угол подъема. Подобным же образом отрицательный фронт 21 спадает не мгновенно и, следовательно, имеет ограниченный угол падения. Очевидно, что если пороговый уровень 30 задан наземным электронным оборудованием 5 слишком низким, то временной интервал 23, измеренный наземным электронным оборудованием 5, превысит 0,75 секунды. Если же пороговый уровень 30 задан наземным электронным оборудованием 5 слишком высоким, то временной интервал 23, измеренный электронным оборудованием 5, будет меньшим, чем 0,75 секунды. Наземное электронное оборудование 5 активно корректирует пороговый уровень 30 таким образом, чтобы измеренный временной интервал 23 оказался как можно ближе к значению 0,75 секунды, повышая при этом пороговый уровень 30 для следующей последовательности, если измеренный временной интервал 23 превышает значение 0,75 секунды, либо понижая пороговый уровень 30 для следующей последовательности, если измеренный временной интервал 23 меньше 0,75 секунды. В данном примере пороговый уровень 30 остается постоянным на протяжении каждой последовательности.
К датчикам 12 относятся два датчика давления Р1 и Р2 и два датчика температуры Т1 и Т2. Мгновенные значения показаний датчиков Р1, Р2, Т1 и Т2 кодируются временными интервалами 24, 25, 26 и 27 соответственно. Перед декодированием каждого временного интервала наземное электронное оборудование 5 корректирует измеренное значение каждого временного интервала 24, 25, 26 и 27 согласно измеренному значению опорного временного интервала 23. Так, например, если измеренное значение опорного временного интервала 23 составило 0,755 секунды, то из каждого измеренного временного интервала 24, 25, 26 и 27 будет вычитаться 0,005 секунды.
Показания датчиков Р1 и Т1 кодируются таким образом, чтобы выдаваемое ими значение, принимаемое за 0%, генерировало временные интервалы 24 и 26 (соответственно) в 1,000 секунды, а значение, принимаемое за 100%, генерировало временной интервал в 2,000 секунды. Промежуточные процентные значения показаний этих датчиков генерируют промежуточные временные интервалы, причем отображение процентных значений показаний датчиков на временные интервалы является (в данном случае) линейным. Показания датчиков Р2 и Т2 кодируются таким образом, чтобы выдаваемое ими значение, принимаемое за 100%, генерировало временные интервалы 25 и 27 (соответственно) в 1,000 секунды, а значение, принимаемое за 0%, генерировало временной интервал в 2,000 секунды. Промежуточные процентные значения показаний этих датчиков генерируют промежуточные временные интервалы, причем отображение процентных значений показаний датчиков на временные интервалы в данном примере является линейным.
Отсюда видно, что при большом давлении по показаниям датчиков Р1 и Р2 для временного интервала 24 будет генерироваться большое значение, а для временного интервала 25 - малое. При малом же давлении по показаниям датчиков Р1 и Р2 для временного интервала 24 будет генерироваться малое значение, а для временного интервала 25 - большое. Несмотря на то, что в типичных забойных компоновках показания датчиков Р1 и Р2 неодинаковы, они будут схожими и, таким образом, благодаря обратной зависимости между показаниями датчиков Р2 и Т2 и кодирующими их временными интервалами общее время, необходимое для передачи всей последовательности, будет более постоянным для переменных давлений и температур, чем это было бы в случае, если бы показания всех датчиков и кодирующие их временные интервалы были связаны прямой зависимостью.
Альтернативный метод показан на фиг.3, на которой положительный фронт 20 изображен при наличии электрических помех и дискретизирован в четырех точках выборки 40, 41, 42 и 43. Эти данные можно получить, дискретизируя сигнал с помощью быстрого аналого-цифрового преобразователя или используя четыре пороговых уровня и уплотнителя по известным методам. Тогда в микропроцессоре, с использованием стандартных методов построения прямой по точкам, можно получить точное положение фронта 20. В среде с сильным электрическим шумом этот метод обнаружения фронта 20 дает более точные и обесшумленные результаты, чем выборка только в одной точке фронта.
Очевидно, что в описанный выше вариант осуществления могут быть внесены различные изменения, не выходящие за пределы объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ | 2004 |
|
RU2373645C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2605155C2 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА СКВАЖИННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2387831C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ С ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2296424C1 |
| Устройство контроля глубинных параметров бурения | 1988 |
|
SU1544961A1 |
| Способ передачи и приема дискретных сообщений в комплексе декаметровой радиосвязи | 2020 |
|
RU2743233C1 |
| Ретранслятор скважинной электромагнитной телеметрии | 2021 |
|
RU2778079C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА И СПОСОБ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛА | 2008 |
|
RU2431237C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И СПОСОБ СВЯЗИ С ИМПЛАНТИРУЕМЫМ МЕДИЦИНСКИМ УСТРОЙСТВОМ | 2008 |
|
RU2495497C2 |
| Способ передачи информации от скважинной к наземной части геофизической аппаратуры | 1983 |
|
SU1134708A1 |
Изобретение относится к области передачи данных и может быть использовано для передачи данных от скважинных датчиков в нефтегазодобывающей отрасли. Достигаемый технический результат - повышение качества канала передачи в приемлемой полосе пропускания при ослаблении влияния электрических помех. Система передачи электрических сигналов содержит модулятор, демодулятор и канал передачи переменного сигнала, при этом модулятор выполнен с возможностью приема входного параметра и кодирования его в переменном сигнале с повторяющимися нарастающими и спадающими фронтами, а также посылки опорного сигнала известной длительности перед посылкой информационного сигнала, демодулятор выполнен с возможностью определения длительностей опорного сигнала и информационного сигнала, вычисления погрешности калибровки системы по длительности опорного сигнала, регистрации этой погрешности и ее вычитания из последующих информационных сигналов. 2 н. и 23 з.п. ф-лы, 3 ил.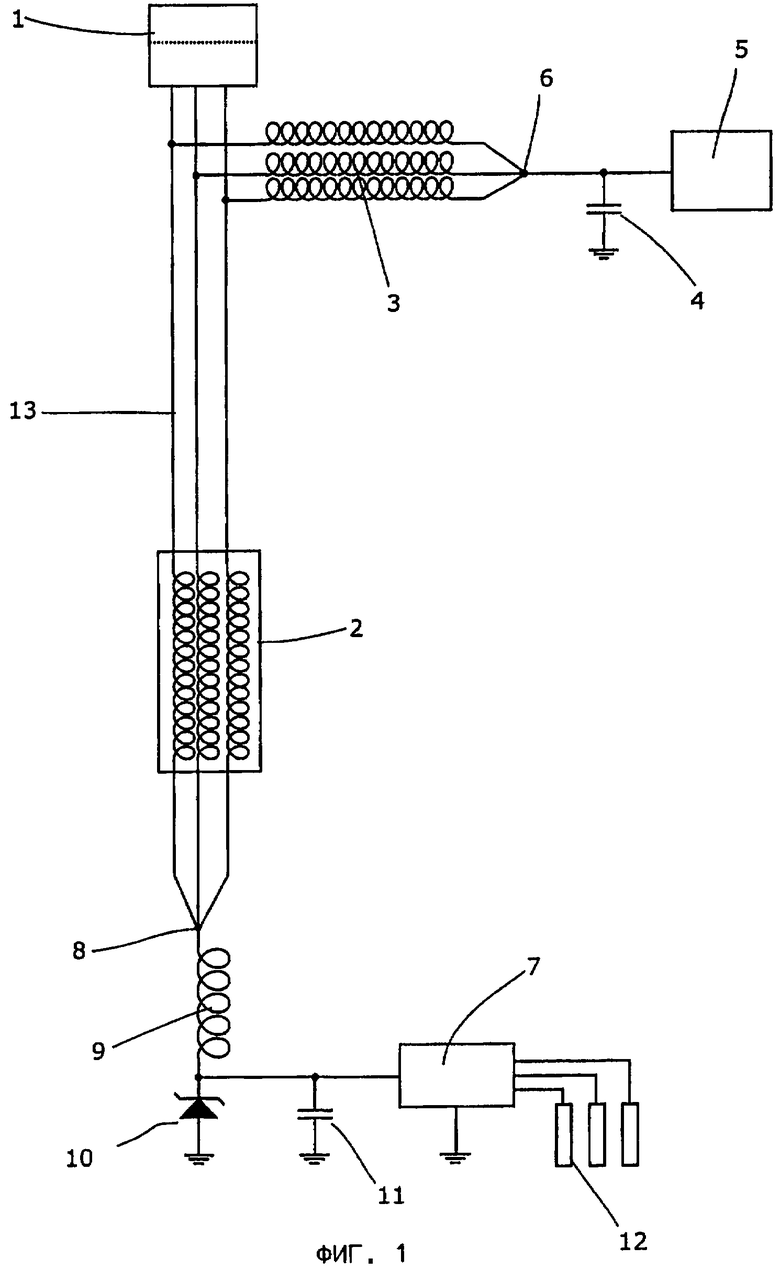
1. Система передачи электрических сигналов, содержащая модулятор, демодулятор и канал передачи переменного сигнала от модулятора к демодулятору, причем модулятор выполнен с возможностью приема входного параметра и кодирования этого входного параметра в переменном сигнале с повторяющимися нарастающими и спадающими фронтами, осуществляемого посредством промежутков времени между следующими друг за другом нарастающими и спадающими фронтами, а также посылки опорного сигнала известной длительности перед посылкой информационного сигнала; демодулятор выполнен с возможностью определения длительностей опорного сигнала и информационного сигнала, вычисления погрешности калибровки системы по длительности опорного сигнала, регистрации указанной погрешности калибровки и ее вычитания из последующих информационных сигналов.
2. Система по п.1, в которой демодулятор определяет фронт сигнала путем сравнения мгновенного значения переменного сигнала с пороговым значением.
3. Система по п.2, в которой демодулятор корректирует пороговое значение для будущих сигналов на основе погрешности калибровки.
4. Система по п.3, в которой демодулятор сохраняет форму опорного сигнала и принимает пороговое значение, для которого погрешность калибровки по существу равна нулю.
5. Система по п.1, в которой канал передачи является неидеальным.
6. Система по п.1, в которой канал передачи является индуктивным.
7. Система по п.1, в которой канал передачи является кабелем трехфазного питания.
8. Система по п.7, в которой кабель трехфазного питания соединен со скважинным оборудованием для добычи нефти или газа.
9. Система по п.1, в которой модулятор выполнен с возможностью последовательного включения входных параметров от нескольких источников данных.
10. Система по п.1, в которой параметры кодируются таким образом, чтобы определенный интервал значений периода повторения импульсов соответствовал определенному значению входного параметра или интервалам значений входного параметра.
11. Система по п.10, в которой интервалы значений входного параметра имеют одинаковую ширину.
12. Система по п.10, в которой интервалы значений входного параметра имеют переменную ширину.
13. Система по п.10, в которой первый сигнал указывает на грубый интервал значений входного параметра, а второй сигнал указывает на точное значение входного параметра.
14. Система по п.13, в которой первый и второй сигнал кодируется по разным протоколам.
15. Система передачи электрических сигналов, содержащая модулятор, демодулятор и канал передачи переменного сигнала от модулятора к демодулятору, где модулятор выполнен с возможностью приема входных параметров от множества датчиков и кодирования этих входных параметров в виде сигнала широтно-импульсной модуляции, причем входные параметры кодируются длительностями последовательных импульсов, входной параметр по меньшей мере от одного датчика кодируется таким образом, что увеличение его значения соответствует увеличению длительности импульса, а входной параметр по меньшей мере от одного другого датчика кодируется таким образом, что увеличение его значения соответствует уменьшению длительности импульса.
16. Система по п.15, в которой имеются два датчика.
17. Система по п.15 или 16, в которой по меньшей мере один датчик и по меньшей мере один другой датчик измеряют параметры, находящиеся в прямой зависимости друг от друга.
18. Система по п.15 или 16, в которой по меньшей мере один датчик и по меньшей мере один другой датчик измеряют один и тот же параметр.
19. Система п.15 или 16, в которой по меньшей мере один датчик и по меньшей мере один другой датчик спарены для резервирования.
20. Система п.15 или 16, в которой по меньшей мере один датчик является датчиком давления.
21. Система по п.15 или 16, в которой по меньшей мере один датчик является датчиком температуры.
22. Система по п.15 или 16, в которой входной параметр по меньшей мере от одного датчика кодируется промежутком времени между нарастающим фронтом и спадающим фронтом.
23. Система по п.22, в которой входной параметр по меньшей мере от одного датчика кодируется промежутком времени между нарастающим фронтом и спадающим фронтом, а входной параметр по меньшей мере от одного другого датчика кодируется промежутком времени между этим спадающим фронтом и следующим за ним нарастающим фронтом.
24. Система по п.15 или 16, в которой входной параметр по меньшей мере от одного датчика кодируется промежутком времени между нарастающим фронтом и следующим за ним нарастающим фронтом.
25. Система по п.24, в которой входной параметр по меньшей мере от одного датчика кодируется промежутком времени между нарастающим фронтом и следующим за ним нарастающим фронтом, а входной параметр по меньшей мере от одного другого датчика кодируется промежутком времени между спадающим фронтом и следующим за ним спадающим фронтом.
| Кипятильник непрерывного действия | 1946 |
|
SU68977A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА МОДУЛИРОВАННЫХ ПО ФАЗЕ И ЧАСТОТЕ СИГНАЛОВ | 2002 |
|
RU2228576C2 |
| DE 2849060 A1, 22.05.1980 | |||
| US 006044333 A, 28.03.2000. | |||

