Изобретение относится к способу передачи информаций между электродвигателем и блоком управления двигателем посредством по меньшей мере одного сигнала переноса, а также к устройству для осуществления такого способа.
Во многих случаях является желательным или даже необходимым передавать информации от двигателя, в частности электродвигателя или его непосредственного окружения на блок управления или прибор управления. В электродвигателях, например, обычно с помощью датчиков регистрируются положение вращения, скорость вращения, а также направление вращения ротора относительно статора, и полученные таким образом информации передаются на прибор управления, с помощью которого, в том числе на основе этих информаций, осуществляется управление электродвигателем.
Соответствующее устройство для передачи информаций при этом обычно выполняется с расчетом на определенный объем информации в единицу времени, так что для передачи дополнительных информаций, которые появляются, например, в случае впоследствии встроенных датчиков, должен дополнительно оборудоваться собственный, то есть дополнительный интерфейс между двигателем и прибором управления.
DE 102010023535 А1 описывает способ передачи данных в системе бортовой сети с электрическим передатчиком сигнала и приемником сигнала. Система бортовой сети выполнена таким образом, что передатчик сигнала может беспроводным способом передавать модулированный полезный сигнал и опорный сигнал для демодуляции модулированного полезного сигнала.
В DE 102005029410 А1 описано устройство и способ для связи между регулятором для источника напряжения и прибором управления в автомобиле. Здесь дополнительные информации для регулирования электрической машины накладываются на базовый сигнал. Предпочтительным образом посредством передаваемого по динамической управляющей линии сигнала может быть представлено опорное напряжение, в частности, для сигналов электрической линии.
Из DE 102007029824 А1 известно устройство для регистрации квадратурных сигналов.
Исходя из этого, в основе изобретения лежит задача предложить усовершенствованный способ передачи информаций, а также устройство для выполнения соответствующего способа. В соответствии с основной идеей при этом должны передаваться, в частности, дополнительные информации, причем они передаются как бы посредством модуляции имеющихся информаций, без существенного изменения имеющихся информаций.
В отношении способа эта задача в соответствии с изобретением решается способом с признаками пункта 1 формулы изобретения и способом с признаками пункта 11 формулы изобретения. Зависимые пункты содержат частично предпочтительные и частично самостоятельные, соответствующие изобретению дальнейшие развития настоящего изобретения.
Способ служит для передачи информаций между электродвигателем или его непосредственным окружением и блоком управления двигателем, причем передача осуществляется с помощью по меньшей мере одного сигнала переноса. При этом в качестве информаций, с одной стороны, передаются информации состояния движения электродвигателя и, с другой стороны, дополнительные информации через по меньшей мере один канал передачи, причем информации состояния движения имеются в форме по меньшей мере одного базового сигнала, и причем дополнительные информации передаются с помощью базового сигнала.
При этом такой способ разработан для сценариев применения, при которых имеется интерфейс между электродвигателем и блоком управления двигателем для передачи информаций состояния движения и при которых дополнительно или последовательно передаваемый в единицу времени объем информации повышается за счет дополнительных информаций. Передача дополнительных информаций осуществляется тогда с использованием уже имеющегося интерфейса. Для этого дополнительные информации предпочтительным образом модулируют базовый сигнал, который несет информации состояния движения, и затем передаются с помощью сигнала переноса. Модуляция дополнительными информациями базового сигнала осуществляется при этом предпочтительно в пределах специфических для протокола временных допусков, так что информационное содержание базового сигнала в сигнале переноса остается неизменным.
Таким образом, имеется, например, устройство с электродвигателем, прибором управления прибором и так называемым квадратурным интерфейсом (интерфейсом квадратурного кодера), при котором движения ротора электродвигателя относительно статора регистрируются посредством инкрементного датчика и при котором эти информации состояния движения передаются через «квадратурный интерфейс» на прибор управления, тогда этот уже имеющийся «квадратурный интерфейс» согласно представленному здесь способу также используется для того, чтобы дополнительные информации, которые генерируются, например, на основе дополнительно или впоследствии реализованных в устройстве и установленных вблизи электродвигателя температурных датчиков, передавать на прибор управления. В соответствии с этим можно, например, отказаться от прокладки кабеля в качестве отдельной сигнальной линии между температурным датчиком и прибором управления.
В качестве дополнительных информаций здесь следует понимать не только информации или данные, которые генерируются посредством датчиков или подобных функциональных блоков, как, например, температурных датчиков, счетчиков рабочего времени, счетчиков для общего числа поворотов ротора или также внешних датчиков, но также информации, которые, в частности, как неизменные параметры сохранены в памяти информации. Так, например, является общепринятым снабжать конструктивные узлы или приборы так называемой «электронной фирменной табличкой», которая, в том числе, обеспечивает простую возможность идентификации. В частности, если несколько таких конструктивных узлов или приборов комбинируются друг с другом для образования системы, и эти конструктивные узлы или приборы осуществляют связь друг с другом, такая «электронная фирменная табличка» обеспечивает возможность распознавания конструктивных узлов или приборов относительно друг друга. Ссылаясь на предыдущий пример, таким образом, электродвигатель и прибор управления были бы снабжены, соответственно, «электронной фирменной табличкой», так что, например, при обусловленной неисправностью замене прибора управления он распознает электродвигатель по «электронной фирменной табличке» электродвигателя и затем путем настройки параметров в приборе управления управляет электродвигателем, как предусмотрено. Также не существует принудительно необходимости непрерывно передавать дополнительные информации, так как они могут возникать, например, также временно, то есть с определенными временными интервалами.
В особенности, если дополнительные информации необходимо передавать не постоянно, является предпочтительным вариант способа, в котором дополнительные информации передаются в форме пакетов данных. При этом предпочтителен вариант способа, при котором для маркировки начала и конца каждого пакета передается соответствующий запускающий сигнал с сигналом переноса. Маркировка начала и конца пакета данных при передаче пакетов в принципе известна и используется прежде всего в том случае, когда для коммуникации между двумя конструктивными узлами или двумя приборами не используется общий опорный такт.
Далее предпочтительным является вариант способа, при котором для генерации сигнала переноса запускающие сигналы добавляются в базовый сигнал и при котором сигнал переноса во временных интервалах между запускающими сигналами соответствует неизмененному базовому сигналу. Это означает, что большую часть времени базовый сигнал сам используется в качестве сигнала переноса и что только в определенных временных интервалах базовым сигналом манипулируют путем преобразования в сигнал переноса, чтобы сгенерировать запускающий сигнал в сигнале переноса. В принципе при этом используют заданный временной профиль базового сигнала и задаваемые тем самым информации, чтобы передавать дополнительные информации, причем приемнику сигнала, то есть блоку управления двигателем, сообщается, в каком временном интервале базового сигнала находятся передаваемые дополнительные информации. Таким способом можно, например, обеспечивать то, что блок оценки, который выполнен с возможностью оценки базового сигнала, для этой оценки может также запитываться сигналом переноса. Предварительное извлечение базового сигнала из сигнала переноса, таким образом, не требуется, и блок оценки также не должен настраиваться, чтобы считывать информации состояния движения, которые содержатся в базовом сигнале, из сигнала переноса. Сигнал переноса вводится тогда параллельно во второй блок оценки, который считывает из сигнала переноса дополнительные информации.
Предпочтительным является дополнительно вариант способа, при котором с каждым пакетом данных передается одно и, в частности, точно одно числовое значение, которое задается количеством событий во временном профиле сигнала переноса между двумя запускающими сигналами и при котором в качестве числовых значений предпочтительно используются только значения из постоянно заданного количества значений. Таким способом в том числе устанавливается количество данных каждого пакета данных, причем в качестве количества данных предпочтительно предусмотрен полубайт (16 возможных значений или состояний). Этот вариант способа, например, также пригоден для устройства с электродвигателем, при котором положение вращения ротора регистрируется с помощью цифрового датчика абсолютного положения, с прибором управления и с интерфейсом между электродвигателем и прибором управления таким образом, что определенные посредством датчика абсолютного положения информации состояния движения передаются с помощью пакетов данных, между которыми, соответственно, имеется пауза. В таком случае тогда, например, генерируется запускающий сигнал таким образом, что простой прямоугольный импульс передается в течение такой паузы, так что сигнал переноса между двумя пакетами данных имеет прямоугольный импульс, и в качестве события во временном профиле сигнала переноса оценивается пауза между двумя пакетами данных. Это означает, что количество событий во временном профиле сигнала переноса в этом случае соответствует количеству пауз между двумя запускающими сигналами.
Целесообразным также является вариант способа, при котором для передачи информаций используются по меньшей мере два сигнала переноса, при котором каждый сигнал переноса передается по собственному каналу передачи, то есть, например, через электрическую линию, и при котором информации состояния движения имеются в форме двух базовых сигналов. Таким образом достигается то, что описанный здесь способ может использоваться при возможно большем количестве сценариев применения.
В частности, при этом между обоими базовыми сигналами имеется фазовое соотношение, причем один из обоих базовых сигналов, согласно предпочтительному варианту способа, используется в неизменной форме как один из сигналов переноса, и причем другой базовый сигнал посредством манипуляции фазового соотношения преобразуется в другой сигнал переноса. Дополнительные информации вводятся тогда посредством манипуляции фазового соотношения в сигналы переноса.
В соответствии с другим предпочтительным вариантом способа, определенное фазовое соотношение между сигналами переноса функционирует как запускающий сигнал. В простейшем случае используются, например, два сигала переноса, между которыми существует зависимое от времени фазовое соотношение. Для этого фазового соотношения тогда предусмотрены базовое значение и запускающее значение в качестве возможных значений, причем в течение большей части времени существует базовое значение, и причем для генерации запускающего сигнала вынуждается ограниченная по времени смена фазового соотношения на запускающее значение.
К тому же является предпочтительным осуществлять временное квантование с дискретными значениями, так что для фазового соотношения предусмотрены только эти значения, и так что эти значения могут использоваться для кодирования дополнительных информаций. Со ссылкой на предыдущий пример тогда, таким образом, может устанавливаться не более двух возможных значений для зависимого от времени фазового соотношения, вместо этого предусматривается большее количество значений. При этом тогда, в частности, осуществляется модуляция фазового соотношения, так что дополнительные информации с помощью этой фазовой модуляции могут вводиться в сигналы переноса.
Целесообразным, кроме того, является вариант способа, при котором информации состояния движения двигателя генерируются посредством инкрементного датчика и при котором для передачи информаций между электродвигателем или его непосредственным окружением и блоком управления двигателем используется «квадратурный интерфейс» (интерфейс квадратурного кодера) с двумя каналами передачи. Этот вариант способа представляет адаптацию к особенно типичному сценарию применения. При этом предпочтительным образом в качестве базовых сигналов и в качестве сигналов переноса используются, соответственно, двоичные сигналы, и, кроме того, предпочтительным образом соответствующее событие задается сменой уровня сигнала. Если, таким образом, например, передается числовое значение, которое согласно предусмотренному кодированию соответствует определенной дополнительной информации, то это числовое значение предпочтительно задается через количество фронтов сигнала для двоичного сигнала переноса. При этом, в частности, в случае двух сигналов переноса предусматривается несколько возможных вариантов, причем, согласно одному варианту, подсчитываются только нарастающие фронты сигнала переноса, причем согласно другому варианту подсчитываются только спадающие фронты сигнала переноса, причем согласно другому варианту подсчитываются нарастающие фронты обоих сигналов переноса и т.д. Особенно предпочтительным является вариант, при котором подсчитываются все фронты, то есть нарастающие и спадающие фронты обоих сигналов переноса, так как здесь скорость переноса данных для дополнительных информаций является наибольшей.
Зависимое от времени фазовое соотношение между обоими сигналами переноса в этом случае задается посредством временного интервала между двумя последовательными сменами уровня сигнала в обоих сигналах переноса. При этом этот временной интервал зависит от скорости вращения ротора электродвигателя. Поэтому, например, временное квантование задается таким образом, что посредством соответствующего управления электродвигателем с помощью блока управления двигателем для ротора задаются только дискретные скорости вращения. В любом случае предпочтительным является временное квантование, осуществляемое таким образом, что за счет соответствующего изменения, как при аналого-цифровом преобразовании, базовых сигналов, например, в модуляторе с помощью сигналов переноса передаются только дискретные скорости вращения. Вследствие этого при типичном фазовом положении 90° между обоими сигналами переноса разрешаются также только дискретные временные интервалы между двумя последовательными сменами уровня сигнала. Диапазон значений между двумя заданными таким образом значениями для фазового соотношения предоставляется тогда в распоряжение, чтобы вводить дополнительные информации за счет манипуляции фазового соотношения в сигналы переноса, так что сигналы переноса отличаются от базовых сигналов, в частности, за счет измененного фазового соотношения.
Кроме того, предпочтительным является вариант способа, при котором по мере необходимости, в зависимости от рабочего состояния электродвигателя, по меньшей мере один из сигналов переноса генерируется посредством суперпозиции одного из базовых сигналов и дополнительного сигнала, который переносит дополнительные информации. Если, например, двоичные базовые сигналы генерируются посредством инкрементного датчика в электродвигателе, и количество фронтов этих базовых сигналов предусматривается в качестве количества событий во временном профиле сигнала переноса между двумя запускающими сигналами, то скорость передачи данных для дополнительных информаций находится в непосредственной связи со скоростью вращения ротора электродвигателя, то есть числом оборотов двигателя. Поэтому в зависимости от случая применения скорость передачи данных для передачи дополнительных информаций при низких числах оборотов двигателя может быть слишком низкой, так что в этих случаях для обеспечения достаточной скорости передачи данных количество событий, то есть, например, смен фронтов, в сигнале переноса по отношению к базовому сигналу дополнительно повышается.
При этом особенно предпочтительным является вариант способа, при котором генерируется дополнительный сигнал как последовательность импульсов, при котором блок управления двигателем содержит счетчик, с помощью которого оцениваются сигналы переноса, и который выдает информации состояния движения в качестве зависимого от времени значения счетчика, и при котором дополнительный сигнал генерируется таким образом, что временной профиль, но не значение счета, изменяется посредством импульса. Это означает, что, например, счетчик оценивает оба фронта прямоугольного импульса и что оба заданные этим изменения значения счетчика отменяются.
В частности, предпочтительным также является вариант способа, при котором блок управления двигателем содержит базовый счетчик и дополнительный счетчик, причем базовый счетчик считает каждую смену фронта, и причем дополнительный счетчик считает и выдает соответственно смену фронта между двумя запускающими сигналами, и причем дополнительный счетчик с каждым запускающим сигналом вновь устанавливается на исходное значение. Базовый счетчик выдает тогда информации состояния движения как зависимое от времени значение базового счетчика, а дополнительный счетчик выдает дополнительные информации как последовательность значений дополнительного счетчика. Сигналы переноса при этом параллельно вводятся в оба счетчика.
Поставленная задача в отношении устройства решается устройством с признаками пункта 13 формулы изобретения, а также устройством с признаками пункта 14 формулы изобретения.
Примеры выполнения изобретения поясняются ниже более подробно со ссылками на схематичные чертежи, на которых представлено следующее:
фиг. 1 - представление в форме блок-схемы приводного блока, включающего в себя электродвигатель и блок управления двигателем,
фиг. 2 - диаграмма фрагментов временного профиля двух базовых сигналов при постоянной скорости вращения электродвигателя,
фиг. 3 - вторая диаграмма фрагментов временного профиля двух сигналов переноса при постоянной скорости вращения электродвигателя,
фиг. 4 - третья диаграмма фрагментов временного профиля двух базовых сигналов, двух сигналов переноса, а также двух значений счетчика при пониженной скорости вращения электродвигателя.
Соответствующие друг другу части на всех чертежах обозначены одинаковыми ссылочными позициями.
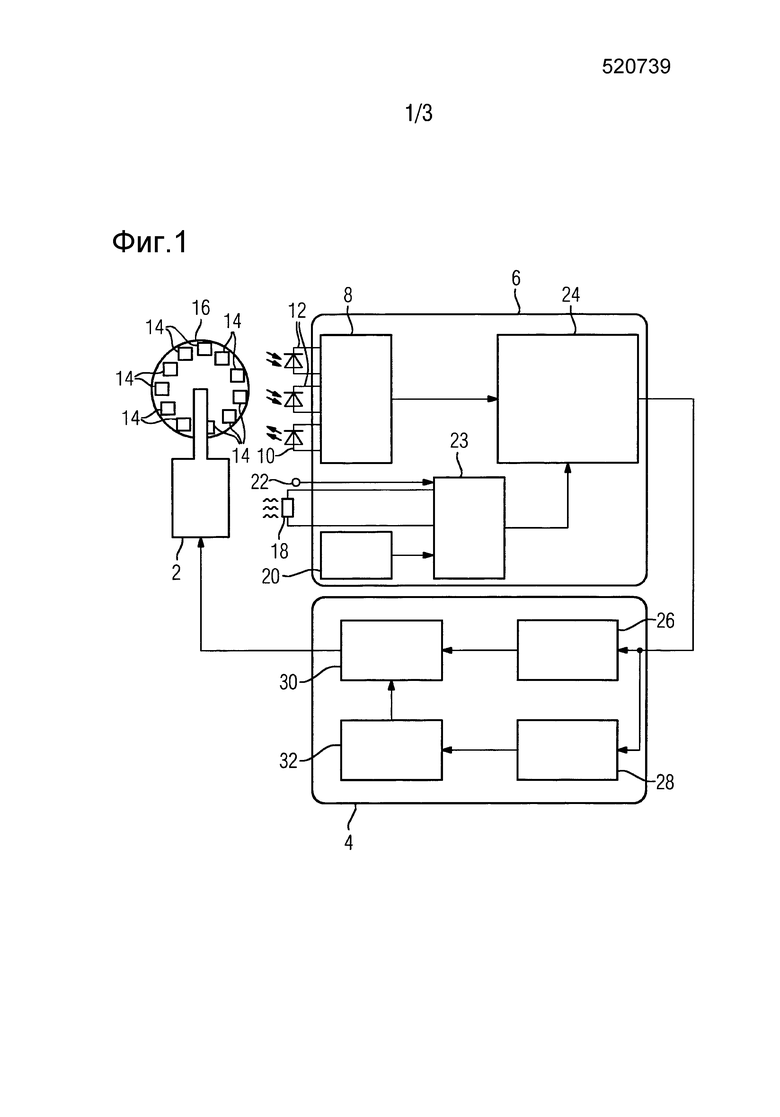
В описываемом ниже примере выполнения электродвигатель 2 функционирует, в качестве примера, как приводной блок подробно не показанной двери лифта. При этом электродвигатель 2, как показано на фиг. 1, управляется с помощью блока 4 управления двигателем и, кроме того, контролируется посредством сенсорного блока 6, причем сенсорный блок 6 передает информации состояния движения электродвигателя 2 и дополнительные информации на блок 4 управления двигателем.
Для генерации информаций состояния движения сенсорный блок 6 содержит инкрементный датчик 8, который в данном примере выполнения работает по известному принципу фотоэлектрического считывания. Для этого инкрементный датчик 8 содержит светоизлучающий диод 10 и два фотодиода 12, противолежащие светоизлучающему диоду 10. В промежуточное пространство между светоизлучающим диодом 10 и расположенными с небольшим смещением относительно друг друга фотодиодами 12 со стороны периферии выступает кодирующий диск 14, расположенный на оси привода и снабженный прорезями 14, так что фотодиоды 14 со смещением во времени облучаются светом от светоизлучающего диода 10, когда прорезь 14 кодирующего диска 16 проходит мимо фотодиодов 12. Если теперь ось привода вращается вместе с кодирующим диском 16, то инкрементный датчик 8 генерирует два двоичных прямоугольных сигнала в качестве базовых сигналов В1 и В2, которые, как указано на фиг. 2, ввиду пространственного смещения обоих фотодиодов 12 смещены по фазе, например на 90°. Каждый из обоих базовых сигналов B1, В2 генерируется при этом с помощью одного фотодиода 12.
Кроме информаций состояния движения в сенсорном блоке 6 предоставляются в распоряжение и другие информации в качестве дополнительных информаций, которые, например, генерируются с помощью дополнительных датчиков, например температурного датчика 18. Кроме того, в сенсорном блоке 6 имеются дополнительные информации, которые сохранены в памяти 20 информации. Кроме того, при необходимости на сенсорный блок 6 могут извне подаваться через вход 22 данных другие дополнительные информации. Тем самым, например, возможно, впоследствии добавлять другие датчики в качестве внешних датчиков, измеренные сигналы которых подаются тогда через вход 22 данных на сенсорный блок 6. Все дополнительные информации собираются в блоке 23 кодирования и подготавливаются для дальнейшей обработки, при необходимости перекодируются и компонуются в пакеты данных.
Согласно основной идее представленного здесь способа, предоставленные в сенсорном блоке 6 дополнительные информации должны передаваться на блок 4 управления двигателем не через собственный канал передачи, а с помощью базовых сигналов B1, В2, которые транспортируют информации состояния движения электродвигателя 2. Для этого в сенсорный блок 6 встроен модулятор 24, в который вводятся базовые сигналы B1, В2, а также подготовленные дополнительные информации. В модуляторе 24 на основе двух базовых сигналов B1, В2 генерируются два сигнала Т1 и Т2 переноса, в которых содержатся информации состояния движения и дополнительные информации. Оба сигнала Т1 и Т2 переноса затем от сенсорного блока 6 через «квадратурный интерфейс» (интерфейс квадратурного кодера) передаются на блок 4 управления двигателем и в блоке 4 управления двигателем параллельно вводятся в базовый блок 26 оценки и демодулятор 28. В базовом блоке 26 сигналы Т1 и Т2 переноса оцениваются в отношении информаций состояния движения, при этом выдаются зависимые от времени значения для положения вращения, скорости вращения и направления вращения кодирующего диска 16 и передаются на логику 30 управления блока 4 управления двигателем. Посредством демодулятора 28 из сигналов Т1 и Т2 переноса извлекаются пакеты данных и передаются на блок 32 декодирования. В блоке 32 декодирования дополнительные информации вновь подготавливаются, при необходимости декодируются или перекодируются и затем подаются на логику 30 управления.
На основе информаций состояния движения и/или дополнительных информаций логика 30 управления генерирует управляющий сигнал, который передается на электродвигатель 2 и управляет им.
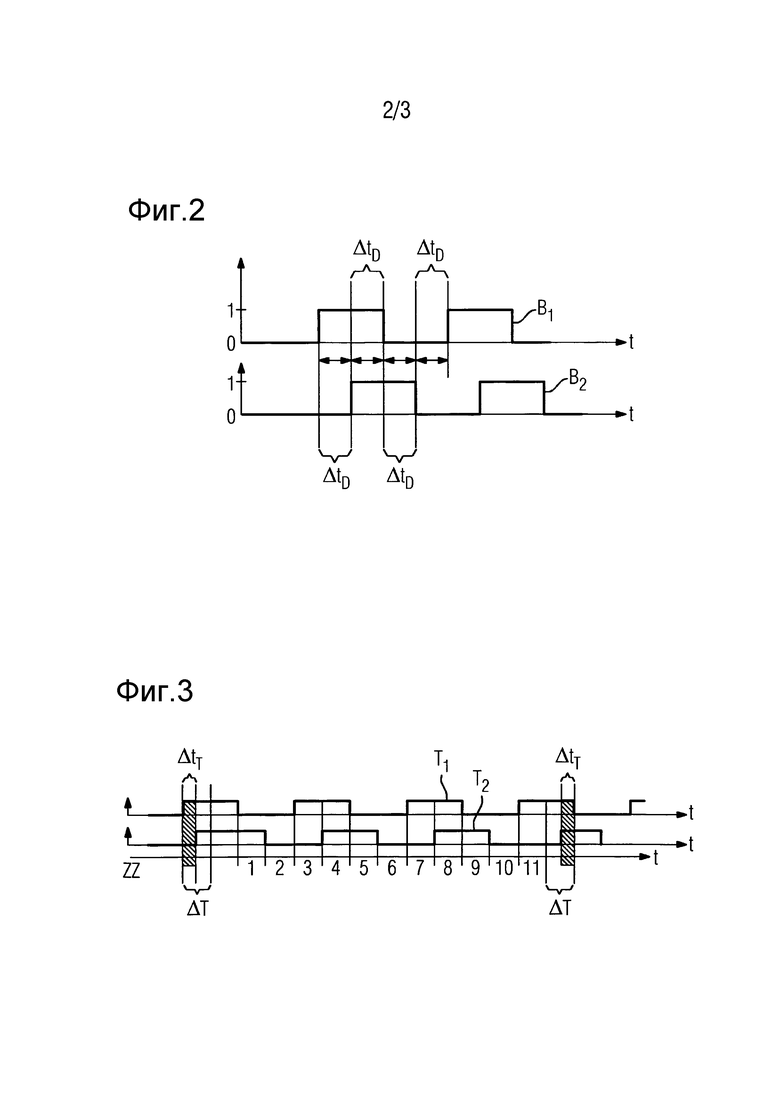
Оба выдаваемых от инкрементного датчика 8 базовых сигнала B1, В2 представляют собой двоичные сигналы или прямоугольные сигналы с двумя определенными состояниями или уровнями сигналов, которые обозначаются как состояние «0», кратко «0» или «низкий», и состояние «1», кратко «1» или «высокий». При этом длительность состояния или временной интервал между двумя сменами уровня сигнала и, тем самым, частота смены уровня сигнала в каждом из базовых сигналов B1, В2 зависит, с одной стороны, от выполнения и распределения прорезей 14 на кодирующем диске 16 и, с другой стороны, от скорости вращения кодирующего диска 16 и, тем самым, от числа оборотов двигателя. При постоянной скорости вращения кодирующего диска 16 оба базовых сигнала B1, В2 демонстрируют идентичный, однако смещенный по фазе на 90° временной профиль, как это фрагментарно показано на фиг. 2. Известным образом можно совместно использовать оба базовых сигнала B1, В2, чтобы определять положение вращения, скорость вращения и направление вращения кодирующего диска 16.
Согласно предложенному способу, однако, оба базовых сигнала B1, В2 не просто передаются на блок 4 управления двигателем и оцениваются базовым блоком оценки 26, но вместо этого в модуляторе 24 преобразуются в сигналы Т1 и Т2 переноса. Для этого временное квантование задается таким образом, что посредством соответствующего преобразования базовых сигналов В1, В2 в модуляторе 24 только дискретные скорости вращения передаются сигналами Т1 и Т2 переноса. При этом базовые сигналы B1, В2 как бы подвергаются квантованию скоростью вращения, подобно аналого-цифровому преобразованию. Вследствие этого, исходя из фазового положения 90° между обоими базовыми сигналами B1, В2, допускаются только дискретные, зависимые от скорости вращения временные интервалы ΔtD между сменой уровня сигнала в сигнале Т1 переноса и сменой уровня сигнала в сигнале Т2 переноса. Диапазон значений между двумя дискретными, зависимыми от скорости вращения значениями для фазового соотношения предоставляется тогда в распоряжение, чтобы посредством манипуляции фазового соотношения осуществлять модуляцию дополнительными информациями в модуляторе 24, так что сигналы Т1 и Т2 переноса также посредством измененного фазового соотношения отличаются от базовых сигналов B1, В2.
Согласно особенно простому варианту, за счет манипуляции фазового соотношения в блок 4 управления двигателем передаются только запускающие сигналы. Для этого сначала для временных интервалов ΔtD в сигналах Т1 и Т2 переноса задаются значения из последовательности 40 мкс, 60 мкс, 80 мкс и т.д., в качестве установленных временным квантованием, зависимых от скорости вращения значений для фазового соотношения. Для передачи запускающего сигнала затем в модуляторе 24 выполняется фазовый сдвиг, так что в сигналах Т1 и Т2 переноса для разности времени ΔtT имеются значения из последовательности 30 мкс, 50 мкс, 70 мкс и т.д., которые затем в демодуляторе 24 распознаются как запускающие сигналы.
Осуществляемый для запускающего сигнала фазовый сдвиг при этом ограничивается по времени, за счет того что состояние в одном из базовых сигналов B1, В2, которые подвергаются временному квантованию, растягивается по своей временной длительности, и к тому же последующее или предшествующее состояние по времени сокращается. Эта ситуация показана на фиг. 3. Оба представленных здесь сигнала Т1 и Т2 переноса различаются от квантованных по времени базовых сигналов В1 и В2 только тем, что во временных интервалах ΔT имеется соответствующий запускающий сигнал. При этом фазовое соотношение во временных интервалах ΔT задается посредством временного интервала ΔtT между сменами уровней сигнала, то есть фронтами прямоугольных сигналов. Этот временной интервал ΔtT детектируется в демодуляторе 28 и распознается и оценивается в качестве запускающего сигнала. При этом за счет выбранного здесь для примера временного смещения обеих последовательностей значений для разностей времен ΔtD и ΔtT, равного 10 мкс, гарантируется, что типично имеющиеся нежелательные колебания в фазовом соотношении сигналов Т1 и Т2 переноса не приводят к ошибочной оценке. При выборе подходящего минимального временного смещения при этом, с одной стороны, необходимо учитывать, что оно больше, чем типично имеющиеся нежелательные колебания фазового соотношения сигналов Т1 и Т2 переноса, а с другой стороны, выбранное временное смещение должно быть достаточно большим, чтобы оно при максимальной скорости вращения электродвигателя 2 и при заданной временной разрешающей способности могло еще регистрироваться демодулятором 28 и базовым блоком 26 оценки.
Альтернативно для разности времени ΔtT при одном запускающем сигнале предусмотрена не последовательность значений, а единственное значение или, точнее, диапазон значений, например от 5 мкс до 30 мкс, который лежит ниже самого низкого значения из последовательности значений для временных интервалов ΔtD (соответствует значению при самом высоком предусмотренном числе оборотов двигателя) и выше временной границы разрешения.
Оба сигнала Т1 и Т2 переноса затем передаются через «квадратурный интерфейс» (интерфейс квадратурного кодера), двужильный электрический провод, на блок 4 управления двигателем и там параллельно вводятся, с одной стороны, в базовый блок 26 оценки и, с другой стороны, в демодулятор 28. Оценка сигналов Т1 и Т2 переноса посредством базового блока 26 оценки осуществляется согласно известному принципу, причем базовый счетчик BZ определяет зависимое от времени значение счетчика. При этом текущее значение счетчика воспроизводит текущее положение вращения кодирующего диска 16, и из временного изменения значения счетчика можно определить скорость вращения и направление вращения кодирующего диска 16. Значение счетчика базового счетчика BZ изменяется с каждой возникающей сменой уровня сигнала в сигналах Т1 и Т2 переноса, причем в зависимости от вида смены уровня сигнала осуществляется изменение на +1 или -1. Возможными здесь вариантами являются следующие:
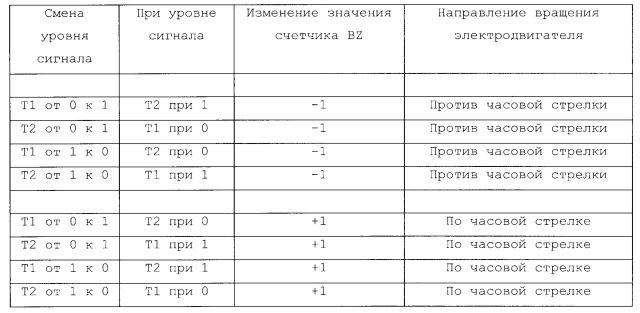
Информации состояния движения электродвигателя 2, представленные посредством временного профиля отсчитанного значения базового счетчика BZ, в базовом блоке 26 оценки перекодируются для дальнейшей обработки в управляющей логике 30 и затем передаются на нее.
Параллельно в демодуляторе 28 осуществляется вторая оценка сигналов Т1 и Т2 переноса. При этом дополнительный счетчик ZZ при каждом появлении запускающего сигнала сначала считывается, а потом снова устанавливается в нуль. Вследствие этого каждая смена уровня сигнала в сигналах Т1 и Т2 переноса обуславливает изменение значения счетчика на +1, пока при следующем запускающем сигнале значение счетчика не будет снова считано и затем сброшено в нуль. Считанное значение счетчика, которое с каждым пакетом данных передается на блок 4 управления двигателем, соответствует кодированной дополнительной информации, которая содержится в этом пакете данных. При этом речь идет о числовом значении между 0 и 17, так что с каждым пакетом данных передается объем данных в один полубайт. Значение счетчика затем передается на блок 32 декодирования, в котором дополнительные информации за счет соответствующего перекодирования подготавливаются для выдачи на управляющую логику 30.
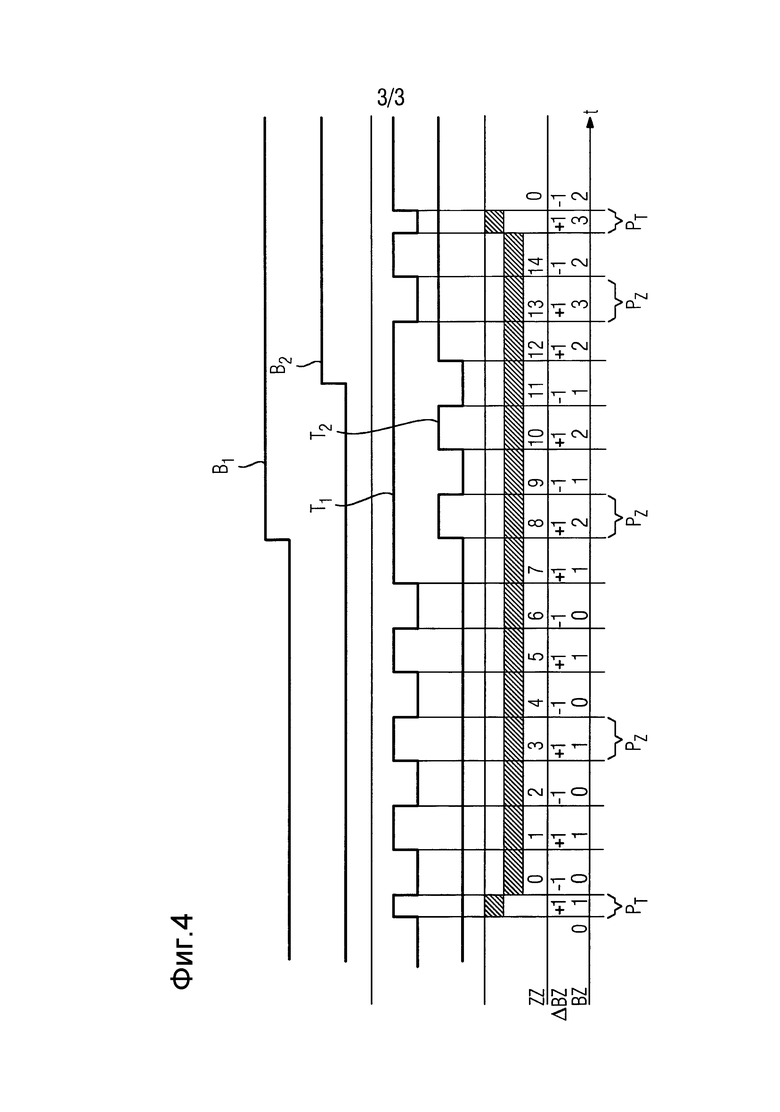
Как уже было упомянуто ранее, частота смены уровней сигнала зависит от числа оборотов электродвигателя 2, из-за чего также скорость передачи данных для дополнительных информаций зависит от числа оборотов двигателя. Для того чтобы гарантировать, что скорость передачи данных не спадет ниже необходимого минимума, модулятор 24 переходит из базового режима работы во второй режим работы, как только временной интервал между двумя следующими друг за другом сменами уровня сигнала превысит сохраненное пороговое значение, здесь 60 мс. В этом втором режиме работы в модуляторе 24 генерируются дополнительные прямоугольные импульсы и передаются на блок 4 управления двигателем, причем сигналы Т1 и Т2 переноса генерируются путем суперпозиции базовых сигналов В1 и В2 с последовательностью этих прямоугольных импульсов. При этом прямоугольные импульсы с короткой длительностью РТ 10 мкс (+/-3 мкс) служат в качестве запускающих сигналов, а прямоугольные импульсы с большей длительностью PZ свыше 17 мкс - для оказания влияния на отсчитанное значение дополнительного счетчика ZZ.
В базовом счетчике BZ, напротив, прямоугольные импульсы в сумме не вызывают никакого изменения отсчитанного значения, так как обе смены уровня сигнала каждого прямоугольного импульса, как представлено на фиг. 4, вызывают изменение ΔBZ на +1 и -1 в базовом счетчике BZ. Альтернативно используются прямоугольные импульсы, при которых последовательность изменений ΔBZ отсчитанного значения является обратной, при которых, следовательно, смены уровня сигнала вызывают изменение ΔBZ на -1 и +1:
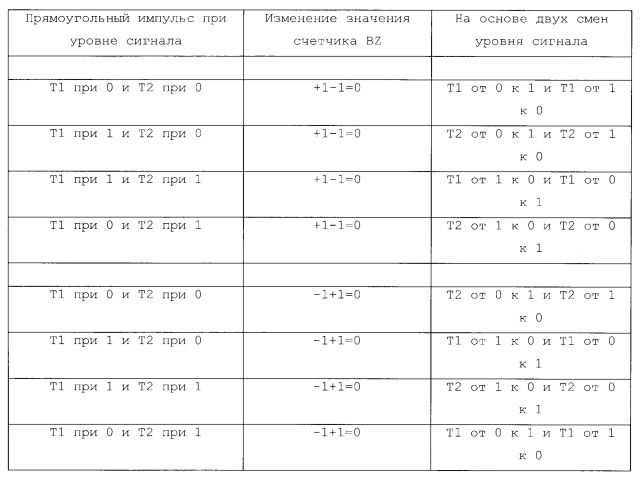
При этом учитывается, что временной интервал между двумя сменами уровня сигнала в сигналах Т1 и Т2 переноса, то есть один в Т1 и один в Т2, составляет по меньшей мере 9 мкс. И здесь при выборе подходящего минимального временного интервала, с одной стороны, следует учитывать, что он больше, чем типично имеющиеся нежелательные колебания фазового соотношения сигналов Т1 и Т2 переноса, а с другой стороны, выбранное временное смещение должно быть достаточно большим, чтобы оно при заданной временной разрешающей способности еще могло регистрироваться.
Если число оборотов электродвигателя 2 снова возрастает выше заданного порогового значения или выше второго порогового значения, то модулятор 24 снова переходит назад в базовый режим работы.
Изобретение не ограничивается вышеописанным примером осуществления. Напротив, специалистом могут быть получены и другие варианты изобретения без отклонения от объема изобретения. В частности, все отдельные признаки, описанные в связи с примером выполнения, могут также комбинироваться между собой иным образом без отклонения от объема изобретения.
Изобретение относится к передаче информаций между электродвигателем и блоком управления двигателем. Заявлена группа изобретений, включающая способы передачи информаций между электродвигателем и блоком управления двигателем, а также устройства с блоком управления двигателем для передачи информаций между электродвигателем и блоком управления двигателем. Особенностью заявленных способов и устройств является то, что в качестве информаций через два канала передачи передают, с одной стороны, информации состояния движения электродвигателя и, с другой стороны, дополнительные информации, причем информации состояния движения имеются в форме двух базовых сигналов, причем дополнительные информации передают с помощью базовых сигналов, причем для передачи информаций используют два сигнала переноса, причем каждый сигнал переноса передают по собственному каналу передачи. Техническим результатом является обеспечение передачи дополнительных информаций посредством модуляции имеющихся информаций без существенного изменения имеющихся информаций. 4 н. и 10 з.п. ф-лы, 4 ил.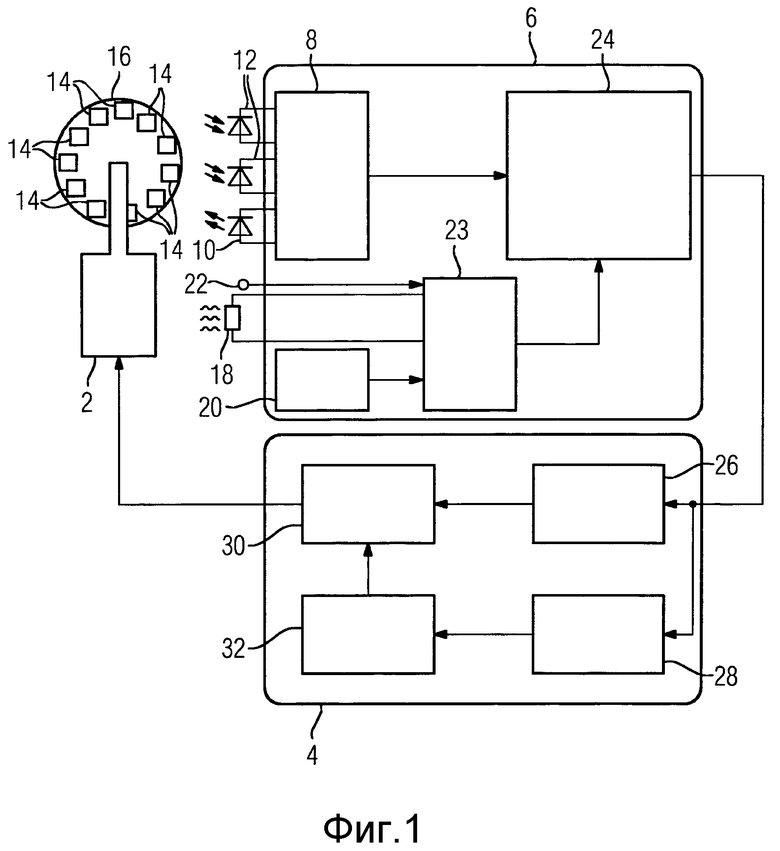
1. Способ передачи информаций между электродвигателем (2) и блоком (4) управления двигателем, причем в качестве информаций через два канала передачи передают, с одной стороны, информации состояния движения электродвигателя (2) и, с другой стороны, дополнительные информации, и причем информации состояния движения имеются в форме двух базовых сигналов (B1, В2), и причем дополнительные информации передают с помощью базовых сигналов (B1, В2), причем для передачи информаций используют два сигнала (T1, Т2) переноса, причем каждый сигнал (T1, Т2) переноса передают по собственному каналу передачи, причем между обоими базовыми сигналами (B1, В2) имеется фазовое соотношение (ΔtD), причем один из обоих базовых сигналов (В1) используют в неизменной форме как один из сигналов (Т1) переноса, и причем другой базовый сигнал (В2) посредством манипуляции фазового соотношения преобразуют в другой сигнал (Т2) переноса.
2. Способ по п. 1,
в котором дополнительные информации передают в форме пакетов данных.
3. Способ по п. 2,
в котором для маркировки начала и конца каждого пакета данных соответствующий запускающий сигнал передают сигналу (Т1, Т2) переноса.
4. Способ по п. 3,
в котором для генерации сигнала (T1, Т2) переноса запускающие сигналы добавляют в базовые сигналы (B1, В2), и причем сигнал (T1, Т2) переноса во временных интервалах между запускающими сигналами соответствует неизмененным базовым сигналам (B1, В2).
5. Способ по п. 3 или 4,
в котором с каждым пакетом данных передают числовое значение, которое задается количеством событий во временном профиле сигнала (T1, Т2) переноса между двумя запускающими сигналами, причем количество событий во временном профиле сигнала (T1, Т2) переноса соответствует количеству пауз между двумя запускающими сигналами, и причем в качестве числовых значений предпочтительно используют только значения из заданного количества значений.
6. Способ по п. 1,
в котором определенное фазовое соотношение (ΔtT) функционирует как запускающий сигнал.
7. Способ по п. 1,
в котором осуществляют временное квантование с дискретными значениями, так что для фазового соотношения (ΔtD) предусмотрены только эти значения, и причем эти значения используют для кодирования дополнительных информаций.
8. Способ по п. 1,
в котором информации состояния движения электродвигателя (2) генерируют посредством инкрементного датчика (8), и причем для передачи информаций между электродвигателем (2) и блоком (4) управления двигателем используют квадратурный интерфейс с двумя каналами передачи.
9. Способ по п. 1,
в котором в качестве базовых сигналов (B1, В2) и в качестве сигналов (T1, Т2) переноса используют, соответственно, двоичные сигналы.
10. Способ передачи информаций между электродвигателем (2) и блоком (4) управления двигателем, причем в качестве информаций через два канала передачи передают, с одной стороны, информации состояния движения электродвигателя (2) и, с другой стороны, дополнительные информации, и причем информации состояния движения имеются в форме двух базовых сигналов (B1, В2), и причем дополнительные информации передают с помощью дополнительного сигнала, причем для передачи информаций используют два сигнала (T1, Т2) переноса, причем каждый сигнал (T1, Т2) переноса передают по собственному каналу передачи, причем в зависимости от рабочего состояния электродвигателя (2) по меньшей мере один из сигналов (T1, Т2) переноса генерируют посредством суперпозиции одного из базовых сигналов (B1, В2) и дополнительного сигнала.
11. Способ по п. 10, в котором в качестве базовых сигналов (B1, В2) и в качестве сигналов (T1, Т2) переноса используют двоичные сигналы, причем передают числовое значение, которое задается количеством событий во временном профиле сигнала (T1, Т2) переноса между двумя запускающими сигналам, причем количество событий во временном профиле сигнала (T1, Т2) переноса между двумя запускающими сигналами соответствует количеству фронтов двоичных сигналов.
12. Способ по п. 11,
в котором дополнительный сигнал генерируют как последовательность импульсов, причем блок (4) управления двигателем содержит счетчик (BZ), с помощью которого оценивают сигналы (T1, Т2) переноса и который выдает информации состояния движения в качестве зависимого от времени значения счетчика, и причем дополнительный сигнал генерируют таким образом, что значение счетчика посредством импульса не изменяется.
13. Устройство с блоком (4) управления двигателем для передачи информаций между электродвигателем (2) и блоком (4) управления двигателем, с сенсорным блоком (6), который для генерации информаций состояния движения содержит инкрементный датчик (8), причем в качестве информаций, с одной стороны, информации состояния движения электродвигателя (2) и, с другой стороны, дополнительные информации предусмотрены для передачи через два канала передачи, причем информации состояния движения имеются в форме двух базовых сигналов (B1, В2), и базовые сигналы (B1, В2) также служат для передачи дополнительных информаций, причем для передачи информаций служат два сигнала (T1, Т2) переноса, причем каждый сигнал (T1, Т2) переноса передается по собственному каналу передачи, причем между обоими базовыми сигналами (B1, В2) имеется фазовое соотношение (ΔtD), причем один из обоих базовых сигналов (В1) используется в неизменной форме как один из сигналов (Т1) переноса, и причем другой базовый сигнал (В2) посредством манипуляции фазового соотношения преобразуется в другой сигнал (Т2) переноса.
14. Устройство с блоком (4) управления двигателем для передачи информаций между электродвигателем (2) и блоком (4) управления двигателем, с сенсорным блоком (6), который для генерации информаций состояния движения содержит инкрементный датчик (8), причем в качестве информаций, с одной стороны, информации состояния движения электродвигателя (2) и, с другой стороны, дополнительные информации предусмотрены для передачи через два канала передачи, причем информации состояния движения имеются в форме двух базовых сигналов (B1, В2), и дополнительные информации передаются с помощью дополнительного сигнала, причем для передачи информаций служат два сигнала (T1, Т2) переноса, причем каждый сигнал (T1, Т2) переноса передается по собственному каналу передачи, причем в зависимости от рабочего состояния электродвигателя (2) по меньшей мере один из сигналов (T1, Т2) переноса генерируют посредством суперпозиции одного из базовых сигналов (B1, В2) и дополнительного сигнала.
| DE 102010023535 A1, 15.12.2011 | |||
| DE 102005029410 A1, 28.12.2006 | |||
| Устройство для управления группой шаговых электродвигателей | 1981 |
|
SU1073871A2 |
| US 4976552 A, 11.12.1990 | |||
| Устройство для определения адгезии металлических поверхностей | 2016 |
|
RU2625257C1 |

