Область техники, к которой относится изобретение
Изобретение относится к области поддержки навигационных систем и, в частности, к формату, в котором информация, относящаяся к степени исправности спутников, распространяется из сети связи на терминалы. Изобретение также относится к устройству, содержащему приемник позиционирования для выполнения позиционирования на основе одного или более сигналов спутниковой навигационной системы. Изобретение также относится к сетевому элементу, содержащему передатчик для передачи в приемник поддерживающих данных спутниковой навигационной системы. Кроме того, изобретение относится к способам доставки поддерживающих данных спутниковой навигационной системы в устройство, а также к способу использования поддерживающих данных при позиционировании устройства. Изобретение также относится к модулю, компьютерному программному продукту, сигналу, носителю, имеющему записанный на нем сигнал, и серверу поддерживающих данных.
Предпосылки создания изобретения
Одной из известных навигационных систем является система GPS (глобальная система позиционирования, Global Positioning System), которая в данное время включает более 20 искусственных спутников Земли, половина из которых обычно находится одновременно в поле зрения приемника. Эти спутники передают, например, эфемеридные данные спутника, а также данные о времени спутника. Приемник, используемый при позиционировании, обычно делает вывод о своем местоположении путем вычисления времени прохождения сигналов, получаемых приемником одновременно с нескольких спутников, принадлежащих к системе позиционирования, и вычисляет время передачи (Time of Transmission, ToT) сигнала. Для позиционирования приемник должен обычно получить сигнал по меньшей мере от четырех спутников, находящихся в поле зрения, чтобы вычислить местоположение. Другой уже запущенной навигационной системой является российская система ГЛОНАСС (Глобальная Навигационная Система).
В будущем будут также иметься и другие, отличные от GPS и ГЛОНАСС, навигационные системы на базе искусственных спутников Земли. В Европе проектируется система Galileo, которая будет запущена в течение нескольких лет. Также расширяются системы корректировки на базе спутников (Space Based Augmentation Systems, SBAS), такие как WAAS (Wide Area Augmentation System), EGNOS (European Geostationary Navigation Overlay Service) и GAGAN (GPS Aided GEO Augmented Navigation). Все шире применяются системы локальной корректировки (Local Area Augmentation Systems, LAAS), использующие стационарные наземные навигационные станции. Собственно говоря, системы LAAS фактически не являются навигационными системами на основе спутников, хотя их навигационные станции определяются как «псевдо спутники» или «pseudolites». Принципы навигации, применимые к системам на базе искусственных спутников Земли, могут также применяться к системам LAAS. Сигналы псевдоспутников могут приниматься стандартным приемником глобальной системы спутниковой навигации (Global Navigation Satellite System, GNSS). Кроме того, в Японии разрабатывается собственная дополнительная система GPS, называемая системой Quasi-Zenith Satellite System (QZSS).
Навигационные системы на основе искусственных спутников Земли, включая системы, использующие псевдоспутники, могут обобщенно определяться как глобальные системы спутниковой навигации (Global Navigation Satellite System, GNSS). В будущем, возможно, появятся приемники позиционирования, которые смогут выполнять операции позиционирования, используя одновременно или в качестве альтернативы несколько навигационных систем. Такие гибридные приемники могут переключаться с первой системы на вторую систему в том случае, когда, например, интенсивности сигналов первой системы становятся ниже определенного предела, или видимых спутников первой системы недостаточно, или созвездие видимых спутников первой системы является неадекватным для позиционирования. Обсуждается вопрос одновременного использования разных систем при наличии сложных условий, например в городских зонах, где видимым является ограниченное число спутников. В таких случаях практически невозможна навигация на основе только одной системы вследствие низкой доступности сигналов. Однако комплексное использование различных навигационных систем позволяет осуществлять навигацию в этих сложных для сигналов условиях.
Каждый спутник системы GPS передает зондирующий сигнал на несущей частоте 1575,42 МГц, которая называется частотой L1. Эта частота также указывается в виде 154f0, где f0=10,23 МГц. Кроме того, спутники передают другой зондирующий сигнал на несущей частоте 1227,6 МГц, называемой частотой L2 (которая равна 120f0). На спутнике модуляция этих сигналов производится с использованием по меньшей мере одной псевдослучайной последовательности. Для каждого спутника эта псевдослучайная последовательность различна. В результате модуляции генерируется кодо-модулированный широкополосный сигнал. Используемый метод модуляции позволяет приемнику проводить различие между сигналами, переданными с разных спутников, хотя, по существу, используемые ими при передаче несущие частоты одинаковы. Доплеровский эффект приводит к незначительному (±5 КГц) изменению несущей частоты в зависимости от геометрии созвездия. Этот метод модуляции называется множественным доступом с кодовым разделением каналов (Code Division Multiple Access, CDMA). На каждом спутнике используемая для модуляции сигнала L1 псевдослучайная последовательность является, например, так называемым кодом С/А (Coarse/Acquisition), принадлежащим к семейству кодов Голда (Gold). Каждый спутник GPS передает сигнал, используя индивидуальный код С/А. Коды формируются как сумма по модулю 2 двух 1023-битовых последовательностей. Первая двоичная последовательность G1 формируется с использованием полинома X10+X3+1, а вторая двоичная последовательность G2 формируется путем задержки полинома X10+X9+X8+X6+X3+X2+1 таким образом, что задержка различна для каждого спутника. Эта компоновка позволяет порождать различные С/А-коды с использованием идентичного генератора кодов. Таким образом, С/А-коды являются двоичными кодами, скорость передачи элементов которых в системе GPS равна 1,023 МГц. Код С/А содержит 1023 элементарных сигнала, где длительность кодового периода составляет 1 мс. Сигнал несущей частоты L1 затем модулируется с использованием навигационной информации с битовой скоростью передачи данных 50 бит/с. Навигационная информация заключает в себе данные о степени исправности спутника, его орбите, режиме работы тактового генератора и т.д.
В системе GPS спутники передают навигационные сообщения, включающие эфемеридные данные и данные времени, которые используются при позиционировании приемника для определения местоположения спутника в данный момент времени. Эти эфемеридные данные и данные времени передаются в кадрах, которые затем разбиваются на подкадры. На фиг.6 приведен пример такой структуры кадра FR. В системе GPS каждый кадр содержит 1500 бит, разделенных на 5 подкадров, каждый из которых включает 300 бит. Так как передача одного бита занимает 20 мс, для передачи каждого подкадра необходимо 6 секунд, а весь кадр передается за 30 секунд. Подкадрам присваиваются номера от 1 до 5. В каждом подкадре 1, в котором, например, передаются данные времени, указывается момент передачи подкадра, а также информация о девиации часов спутника по отношению к времени в системе GPS.
Подкадры 2 и 3 используются для передачи эфемеридных данных. Подкадр 4 содержит другую системную информацию, такую как скоординированное всемирное время (UTC). Подкадр 5 предназначен для передачи данных альманаха на все спутники. Логический объект этих подкадров и кадров называется навигационным сообщением GPS, включающим в себя 25 кадров или 125 подкадров. Таким образом, длина навигационного сообщения составляет 12 минут 30 секунд.
В системе GPS время измеряется в секундах от начала недели. В системе GPS моментом начала недели является полночь с субботы на воскресенье. Каждый передаваемый подкадр содержит информацию на момент времени той недели GPS, когда передавался подкадр. Таким образом, данные времени указывают момент передачи определенного бита, то есть в системе GPS это момент передачи последнего бита в подкадре. На спутниках время измеряется с использованием высокоточных атомных хронометров. Несмотря на это, функционирование каждого спутника контролируется в центре управления для GPS-системы (не показан), где, например, выполняется сравнение времени, чтобы обнаружить хронометрические ошибки на спутниках и передать информацию об этом на спутник.
Спутники во время своей работы производят мониторинг состояния оборудования. Например, спутники могут использовать так называемые операции самоконтроля, чтобы производить обнаружение и регистрацию возможных неисправностей в оборудовании. Ошибки и сбои могут быть мгновенными или более длительными. На основе данных о степени исправности некоторые из неисправностей могут быть скорректированы или информация, переданная неисправным спутником, может быть полностью игнорирована. Неисправный спутник устанавливает признак, указывающий на его неисправность, в поле степени исправности спутника навигационного сообщения. Возможно также, что блок управления системы навигации спутника обнаруживает отклонения в работе спутника или в его сигналах. Поэтому блок управления может также установить для такого спутника индикацию о неисправном состоянии. Эта индикация может быть также установлена, когда производится тестирование спутника, или во время возможной операции коррекции орбиты спутника.
Кроме того, возможно обнаружение аномалий в функционировании спутника путем анализа передаваемых им сигналов. Например, наблюдательная станция может произвести измерения прогнозных ошибок псевдодальности и, если прогнозная ошибка отклоняется от вычисленной прогнозной ошибки более чем на заранее заданную пороговую величину, наблюдательная станция принимает решение о неправильном функционировании спутника. Другим вариантом является сравнение точности эфемеридных данных, переданных спутником, с эталонными данными.
В разных навигационных системах могут отличаться число спутников, их орбитальные параметры, структура навигационных сообщений и т.д. Поэтому рабочие параметры приемника позиционирования на основе GPS могут быть неприменимыми в приемнике позиционирования другой спутниковой системы. С другой стороны, по меньшей мере принципы разработки системы Galileo указывают на то, что будет иметься некоторое сходство систем GPS и Galileo в том, что приемник Galileo сможет, во всяком случае, использовать для позиционирования сигналы спутников GPS.
Устройства позиционирования (или приемники позиционирования), т.е. устройства, имеющие возможность производить позиционирование (определение своего местоположения) на основе сигналов, передаваемых в навигационной системе, не всегда могут получить достаточно сильные сигналы от требуемого числа спутников. Например, может случиться, что при выполнении устройством трехмерного позиционирования оно не может принять сигналы от четырех спутников. Это может случиться в помещении, в городской среде и т.д. Для сетей связи были разработаны способы и системы, позволяющие определить местоположение при неблагоприятных условиях приема сигналов. Требование использования минимум трех сигналов в двумерном позиционировании или четырех сигналов при трехмерном позиционировании не может быть снижено в том случае, когда сеть связи обеспечивает только поддержку навигационной модели в приемнике. Однако, если сеть обеспечивает, например, барометрическую поддержку, которая может использоваться для определения высоты над уровнем моря, достаточно трех спутников для трехмерного позиционирования при условии, что приемник позиционирования имеет доступ к барометрическим измерениям (например, от встроенного барометра). Эти так называемые поддерживающие навигационные системы используют другие сети связи для передачи информации, относящейся к спутникам, в устройства позиционирования. Соответственно, такие устройства позиционирования, имеющие возможность приема и использования поддерживающих данных, могут быть названы поддерживаемыми GNSS-приемниками или, более обобщенно, поддерживаемыми устройствами позиционирования.
В настоящее время, только поддерживающие данные, относящиеся к GPS-спутникам, могут предоставляться в поддерживаемых GNSS-приемниках в сети множественного доступа с кодовым разделением каналов (Code Division Multiple Access, CDMA), глобальной системе мобильной связи (Global System for Mobile communications, GSM) и сети широкополосного множественного доступа с кодовым разделением каналов (Wideband Code Division Multiple Access, W-CDMA). Этот формат поддерживающих данных непосредственно соответствует навигационной модели GPS, определенной в спецификации GPS-ICD-200 SIS (ICD, Interface Control Document; SIS, Signal-In-Space). Эта навигационная модель включает в себя модель синхронизации и орбитальную модель. Для повышения точности используется модель синхронизации, чтобы определить соотношение времени спутника и системного времени, в этом случае - времени системы GPS. Орбитальная модель используется для вычисления местоположения спутника в данный момент времени. Оба типа данных необходимы для спутниковой навигации.
Доступность поддерживающих данных может существенно влиять на эксплуатационные показатели приемника позиционирования. В системе GPS требуется по меньшей мере 18 секунд (длительность первых трех подкадров) в условиях хорошего приема сигнала для того, чтобы GPS-приемник извлек копию навигационного сообщения из сигнала, передаваемого в эфир GPS-спутником. Поэтому, если недоступна адекватная копия навигационной модели (полученная, например, из предыдущего сеанса), требуется по меньшей мере 18 секунд, прежде чем GPS-спутник сможет быть использован при расчете местоположения. В настоящее время в приемниках AGPS (Assisted GPS-GPS с поддержкой) сотовая сеть, такая как глобальная система мобильной связи GSM или универсальная система мобильной связи (Universal Mobile Telecommunications System, UMTS), отправляет приемнику копию навигационного сообщения и, следовательно, приемнику не требуется извлекать данные из спутниковой радиопередачи, а он может получить их непосредственно из сотовой сети. Время до первого определения местоположения (Time To First Fix, TTFF) может быть снижено до значения менее 18 секунд. Это сокращение времени до первого определения местоположения может иметь решающее значение, например, при позиционировании при экстренном вызове. Это также улучшает взаимодействие с пользователем в различных сценариях использования, например, когда пользователь запрашивает информацию о службах, доступных поблизости от его текущего местоположения. Эти типы услуг на базе информации о местоположении (Location Based Services, LBS) используют в запросе точное местоположение пользователя. Следовательно, задержки в определении местоположения могут привести к задержке для пользователя при получении им ответа от системы LBS.
Кроме того, при неблагоприятных условиях приема сигналов использование поддерживающих данных может быть единственным вариантом для навигации. Это происходит из-за того, что снижение уровня мощности сигнала может сделать невозможным для GNSS-приемника получение копии навигационного сообщения. Однако когда навигационные данные предоставляются приемнику из внешнего источника (такого как сотовая сеть), навигация снова становится возможной. Эта возможность может иметь большое значение при работе в помещении, а также в городских зонах, где уровни сигналов могут существенно изменяться в результате наличия зданий и других преград, ослабляющих сигналы со спутника.
Когда мобильный терминал, оснащенный поддерживаемым приемником позиционирования, запрашивает поддерживающие данные, сеть отправляет мобильному терминалу по одной навигационной модели для каждого из спутников, находящихся в поле зрения поддерживаемого приемника позиционирования. Формат, в котором отправляются поддерживающие данные, указывается в различных стандартах. Решения плоскости управления (Control Plane) включают в себя протокол служб размещения радиоресурсов (Radio Resource Location Services Protocol, RRLP) в сети GSM, систему управления радиоресурсами (Radio Resource Control, RRC) в сети W-CDMA и стандарты IS-801.1/IS-801.A в сети CDMA. Передаваемые по радио информационные элементы поддерживающих данных определены в стандарте TS 44.035 для сети GSM. И наконец, имеются решения плоскости пользователя (User Plane) ОМА SUPL 1.0 (Open Mobile Alliance, Secure User Plane for Location) и различные фирменные решения для сетей CDMA. Общим фактором для этих решений является то, что они поддерживают только систему GPS. Однако в результате расширения системы Galileo все стандарты в ближайшем будущем должны быть модифицированы с целью обеспечения совместимости с системой Galileo.
В международной публикации заявки WO 02/67462 раскрываются сообщения поддерживающих данных GPS в сотовых сетях связи и способы передачи поддерживающих данных GPS в сотовых сетях.
Навигационные системы индексируют спутники, чтобы определить относящуюся к ним информацию. Это называется индексацией спутников. Индекс спутника используется для идентификации навигационной модели, относящейся к конкретному спутнику. Каждая навигационная система имеет свой собственный способ индексации.
Система GPS индексирует спутник (космический аппарат - Space Vehicle, SV) на базе номеров псевдослучайных последовательностей (Pseudo-Random Noise, PRN). Номер PRN может идентифицироваться с помощью кода расширения СDМА, используемого спутниками.
Система Galileo использует 7-битовое поле (1-128), чтобы идентифицировать спутник. Число может определяться с помощью кода PRN, используемого спутником.
Система ГЛОНАСС использует 5-битовое поле, чтобы различать спутники. Число может определяться с использованием местоположения спутника в плоскостях орбиты (это местоположение называется «слотом» (slot)). Кроме того, в отличие от других систем, ГЛОНАСС использует множественный доступ с частотным разделением (Frequency Division Multiple Access, FDMA), чтобы распределить радиопередачи спутников по спектру. Здесь следует также отметить использование кода расширения CDMA в системе ГЛОНАСС. Следовательно, имеется таблица, в которой устанавливается соответствие номера слота спутника частоте радиопередачи. Это отображение требуется включить в любой формат поддерживающих данных.
Система SBAS, аналогично системе GPS, использует номера PRN, но они имеют смещение 120. Поэтому первый спутник системы SBAS имеет номер спутника равный 120.
Так как документ QZSS SIS ICD пока еще не опубликован, отсутствуют подробные сведения об индексировании спутников в этой системе. Однако, так как в системе используется корректировка GPS, формат, совместимый с системой GPS, окажется с высокой вероятностью совместимым также и с системой QZSS.
Псевдоспутники (LAAS, Local Area Augmentation System) являются наиболее проблематичными в смысле индексирования. В настоящее время отсутствует стандарт, определенный для индексирования псевдоспутников. Однако их индексация должна по меньшей мере приблизительно соответствовать индексации GPS-типа, так как в них используются номера PRN, аналогичные системе GPS. Поэтому путем гарантирования достаточного диапазона индексов спутников имеется возможность описания передатчиков LAAS с индексацией GPS-типа.
Кроме этих требований (индексация, модель синхронизации и орбитальная модель) навигационная модель должна содержать информацию о моменте начала отсчета для модели {время tREFERENCE в модели синхронизации, аналогичное временной отметке, требуется для орбитальной модели), период действия модели, издание данных (для того, чтобы иметь возможность проводить различия между наборами данных модели), и степень исправности космического аппарата (указывает, доступны ли навигационные данные от космического аппарата).
Текущее поле степени исправности спутника необходимо модифицировать, так как будущая система GPS (и другие системы) передают не только один сигнал, а различные сигналы на разных частотах. Кроме того, возможно, что один из этих сигналов является непригодным для использования, но остальные сигналы являются превосходными. К тому же, в параметре степени исправности спутника должна иметься возможность указания на этот вид неисправности. Текущее решение в системе GPS позволяет только установить наличие неисправности в каком-то сигнале (без определения этого сигнала). Проблема ранее решалась только указанием на то, что весь спутник неисправен, без точного определения конкретного сигнала.
Краткое изложение сущности изобретения
Согласно данному изобретению вместо указания на то, что какой-то определенный спутник неисправен, предоставляют список дефектных сигналов, которые передаются конкретным спутником. Если поврежден весь спутник, имеется специальное значение для маркировки любого сигнала этого определенного спутника как дефектного. Этот подход может использоваться по меньшей мере для систем GPS, Galileo, ГЛОНАСС, SBAS, LAAS и QZSS. Имеются также резервирования для еще неизвестных будущих систем.
В соответствии с первым аспектом данного изобретения предлагается устройство, содержащее
- исследующий элемент, адаптированный для исследования принятых поддерживающих данных, относящихся по меньшей мере к одной навигационной системе,
отличающееся тем, что упомянутый исследующий элемент адаптирован для исследования поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу одного или более сигналов опорных станций по меньшей мере одной навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий пригодность сигнала к использованию, причем устройство адаптировано так, чтобы не использовать для позиционирования такой сигнал, который указан в качестве непригодного для использования.
В соответствии со вторым аспектом данного изобретения предлагается сетевой элемент, содержащий
- управляющий элемент для формирования поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что сетевой элемент также содержит
- исследующий элемент, адаптированный для исследования статуса упомянутых одного или более сигналов опорных станций навигационной системы, чтобы определить пригодность сигнала для позиционирования устройства;
и управляющий элемент адаптирован для
- вставки в поддерживающие данные, для каждого сигнала, который определен исследующим элементом как непригодный для позиционирования устройства, указания о непригодности сигнала, при этом упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
В соответствии с третьим аспектом данного изобретения предлагается система, содержащая
- сетевой элемент, который содержит
- управляющий элемент для формирования поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы; и
- передающий элемент для передачи поддерживающих данных в сеть связи;
- устройство, которое содержит
- приемник позиционирования для выполнения позиционирования на базе одного или более сигналов, переданных опорными станциями упомянутой по меньшей мере одной спутниковой навигационной системы;
- приемник для приема упомянутых поддерживающих данных из сети связи; и
- исследующий элемент, адаптированный для исследования принятых поддерживающих данных,
отличающаяся тем, что сетевой элемент системы также содержит
- исследующий элемент, адаптированный для исследования принятых навигационных данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций навигационной системы, упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий пригодность сигнала к использованию;
где управляющий элемент адаптируется для
- вставки в поддерживающие данные, для каждого сигнала, который определен исследующим элементом в качестве непригодного к использованию при позиционировании устройства, указания о непригодности сигнала, упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал;
и этот упомянутый исследующий элемент устройства адаптируется, чтобы исследовать поддерживающие данные для обнаружения информации, относящейся к статусу упомянутых одного или более сигналов опорных станций навигационной системы, упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий пригодность к использованию сигнала, где устройство адаптируется, чтобы не использовать при позиционировании такой сигнал, который индицируется в качестве непригодного к использованию.
В соответствии с четвертым аспектом данного изобретения предлагается модуль, содержащий исследующий элемент, адаптированный для исследования принятых поддерживающих данных, относящихся по меньшей мере к одной спутниковой навигационной системе,
отличающийся тем, что упомянутый исследующий элемент адаптирован для исследования поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу одного или более сигналов опорных станций по меньшей мере одной навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала для использования, и модуль также имеет выход для формирования указания на такой сигнал, который указан как непригодный для использования.
В соответствии с пятым аспектом данного изобретения предлагается способ, включающий
- формирование поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что способ также содержит
- исследование статуса одного или более сигналов опорных станций по меньшей мере одной навигационной системы, чтобы определить пригодность сигнала к использованию для позиционирования устройства; и
- вставку в поддерживающие данные, для каждого сигнала, который определен при исследовании как непригодный для использования при позиционировании устройства, указания о непригодности сигнала к использованию, при этом упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
В соответствии с шестым аспектом данного изобретения предлагается способ использования поддерживающих данных при позиционировании устройства; способ содержит
- прием поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что способ также содержит
- исследование принятых поддерживающих данных для обнаружения информации, относящейся к статусу упомянутых одного или более сигналов опорных станций навигационной системы, упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий пригодность сигнала; и
исключение такого сигнала, который указан в качестве непригодного к использованию, из сигналов, используемых при позиционировании устройства.
В соответствии с седьмым аспектом данного изобретения предлагается компьютерный программный продукт для хранения компьютерной программы, имеющей исполняемые на компьютере инструкции для
- формирования поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что компьютерная программа также включает исполняемые на компьютере инструкции для
- исследования статуса одного или более сигналов опорных станций по меньшей мере одной навигационной системы, чтобы определить пригодность сигнала для использования при позиционировании устройства;
- вставки в поддерживающие данные, для каждого сигнала, который определен при исследовании как непригодный для использования при позиционировании устройства, указания о непригодности сигнала к использованию, при этом упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
В соответствии с восьмым аспектом данного изобретения предлагается компьютерный программный продукт для хранения компьютерной программы, имеющей исполняемые на компьютере инструкции для
- приема поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что компьютерная программа также содержит исполняемые на компьютере инструкции для
- исследования принятых поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций навигационной системы, упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций, содержит указание на опорную станцию, к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала; и
исключения такого сигнала, который указан в качестве непригодного к использованию, из сигналов, используемых при позиционировании устройства.
В соответствии с девятым аспектом данного изобретения предлагается сигнал для доставки поддерживающих данных в устройство;
сигнал содержит
- поддерживающие данные, относящиеся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что сигнал также содержит для каждого сигнала опорной станции, непригодного для позиционирования, указание о непригодности сигнала к использованию, упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
В соответствии с десятым аспектом данного изобретения предлагается носитель, имеющий записанный на нем сигнал для доставки поддерживающих данных на устройство, сигнал содержит
- поддерживающие данные, относящиеся к одной или более опорным станциям по меньшей мере одной навигационной системы,
отличающийся тем, что сигнал также содержит для каждого сигнала опорной станции, который непригоден для позиционирования, указание о невозможности использования сигнала при позиционировании, упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
В соответствии с одиннадцатым аспектом данного изобретения предлагается сервер поддерживающих данных, содержащий
- управляющий элемент для формирования поддерживающих данных, относящихся к одной или более опорным станциям по меньшей мере одной навигационной системы;
отличающийся тем, что сервер поддерживающих данных также содержит
- исследующий элемент, адаптированный для исследования статуса одного или более сигналов опорных станций навигационной системы, чтобы определить пригодность сигнала для позиционирования устройства,
при этом управляющий элемент адаптирован для вставки в поддерживающие данные, для каждого сигнала, который исследующий элемент определил как непригодный для позиционирования устройства, указания о непригодности сигнала к использованию, причем упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
Изобретение дает несколько преимуществ по сравнению с известным уровнем техники. В тех случаях, когда поврежден только некоторый конкретный сигнал, другие сигналы, передаваемые определенным спутником, все еще являются применимыми и поэтому имеется больше пригодных к использованию сигналов и, следовательно, может быть улучшена доступность службы A-GNSS.
Описание чертежей
Ниже будет приведено более подробное описание изобретения со ссылками на прилагаемые чертежи,
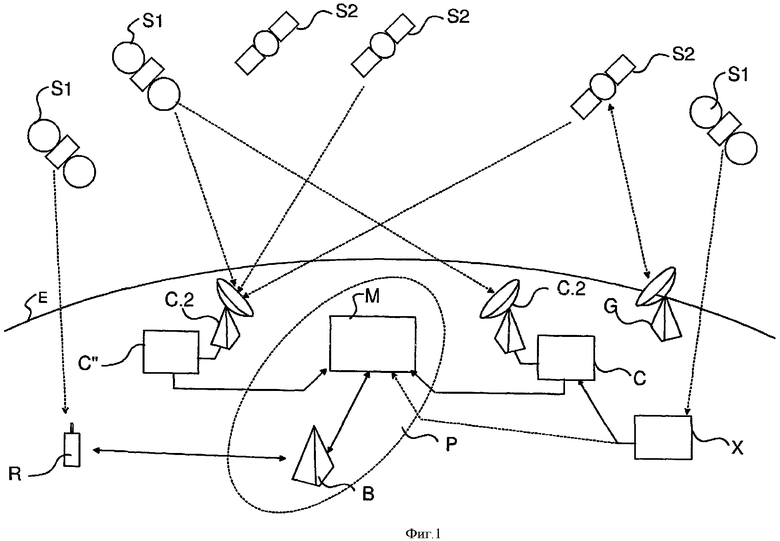
где на фиг.1 изображена общая упрощенная схема системы, в которой может применяться данное изобретение,
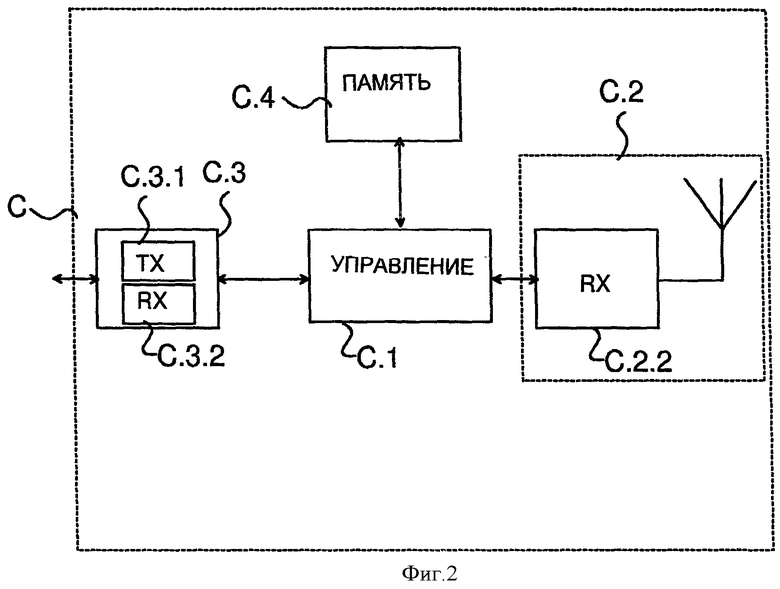
на фиг.2 представлен в виде упрощенной блок-схемы опорный приемник навигационной системы в соответствии с примером воплощения данного изобретения,
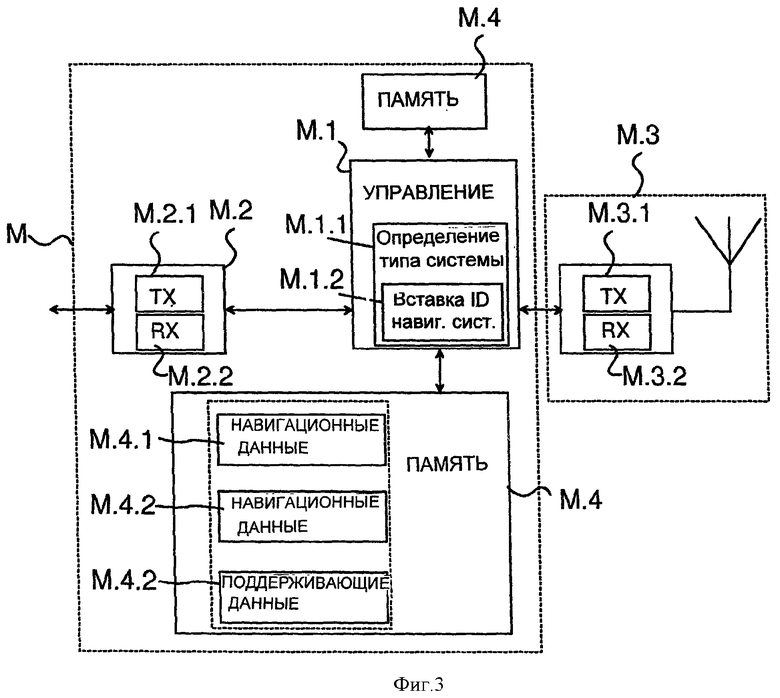
на фиг.3 представлен в виде упрощенной блок-схемы сетевой элемент в соответствии с примером воплощения данного изобретения,
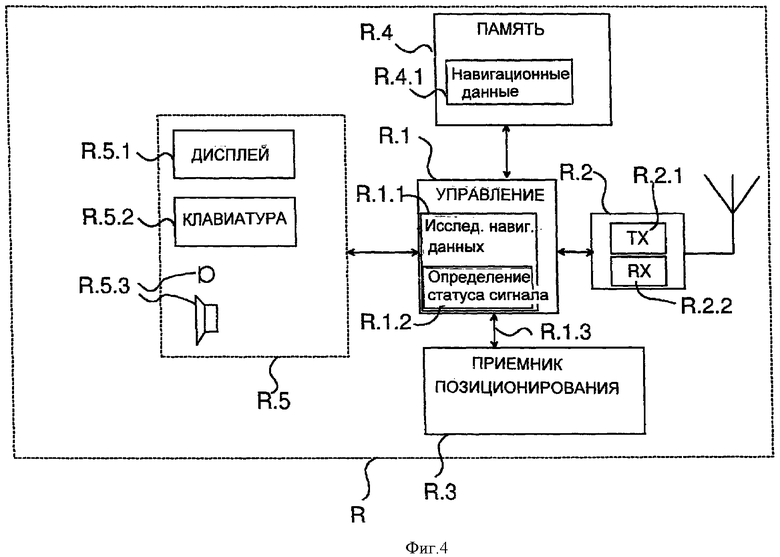
на фиг.4 представлено в виде упрощенной блок-схемы устройство в соответствии с примером воплощения данного изобретения,
на фиг.5 изображен пример воплощения данного изобретения; и
на фиг.6 показан пример структуры кадра, используемой в системе GPS.
Подробное описание изобретения
На фиг.1 приводится пример системы 1, которая может использоваться для позиционирования устройства R. Система 1 содержит опорные станции S, например спутники S1 первой навигационной системы, например GPS, и спутники S2 второй навигационной системы, например системы ГЛОНАСС. Здесь следует отметить, что системы GPS и ГЛОНАСС упоминаются только в качестве неограничивающих примеров и могут использоваться также другие опорные станции S, отличные от спутников (например, псевдоспутники системы LAAS). Кроме того, используется большее число опорных станций, чем это показано на фиг.1. Навигационные системы содержат одну или более наземную станцию G. Наземная станция G управляет функционированием спутников S1, S2 навигационных систем 2, 3 соответственно. Наземная станция G может, например, определить отклонения орбит спутников и точность часов спутников (не показано). Если наземная станция G обнаруживает необходимость коррекции орбиты или часов спутников S1, S2, она передает управляющий сигнал (или сигналы) на спутники S1, S2, которые затем выполняют операцию коррекции на основе управляющего сигнала(ов). Другими словами, наземная станция G относится к наземному сегменту навигационной системы.
В процессе своего функционирования спутники S1, S2 контролируют состояние своего оборудования. Спутники S1, S2 могут использовать, например, операции самоконтроля, чтобы обнаружить возможные неисправности в оборудовании и представить соответствующий отчет. Ошибки и сбои могут быть мгновенными или более длительными. На основе данных о степени исправности некоторые из неисправностей могут быть скорректированы, или информация, переданная неисправным спутником, может быть полностью игнорирована. Неисправный спутник S1, S2 устанавливает в поле степени исправности спутника в навигационном сообщении признак, указывающий на неисправность спутника. Спутник S1, S2 может также указать в навигационном сообщении тот сигнал или сигналы, которые функционируют неверно. Возможно также, что наземная станция G может обнаружить, что какой-то спутник функционирует неправильно, и установить индикацию неисправного сигнала(ов) этого спутника. Эта индикация затем может быть передана в навигационном сообщении в сеть связи Р.
В этом неограничивающем примере воплощения сеть связи Р является сетью GSM, а сетевой элемент М, взаимодействующий с опорным приемником С, является обслуживающим мобильным центром определения местоположения (Serving Mobile Location Centre, SMLC) сети GSM. Опорный приемник С.2 может передавать поддерживающие данные в сетевой элемент М. Сетевой элемент сохраняет поддерживающие данные в памяти М.4 (фиг.3) для передачи в устройство R, когда этому устройству требуются поддерживающие данные для выполнения поддерживаемой операции позиционирования. Имеется также возможность передать поддерживающие данные из сетевого элемента М в устройство R до того, как они потребуются. Например, устройство R может запросить поддерживающие данные для всех видимых спутников и сохранить навигационные данные в памяти R.4 устройства R для более позднего использования.
Сетевой элемент М может также быть центром SMLC сети GSM. Центр SMLC является или отдельным сетевым элементом (таким как MSC) или интегрированным набором функциональных возможностей базовой станции В (контроллера базовой станции (Base Station Controller, BSC)), содержащей функциональность, необходимую для поддержки служб на базе местоположения. Центр SMLC управляет общей координацией и распределением ресурсов, требуемых для определения местоположения устройства R. Он также вычисляет окончательную оценку местоположения и подсчитывает достигнутую точность. Центр SMLC может управлять количеством блоков измерения местоположения (Location Measurement Unit, LMU) с целью получения измерений взаимных радиопомех при определении местоположения или содействия в определении местоположения абонентам мобильных станций в обслуживаемых им зонах.
Теперь основные элементы примера воплощения опорного приемника С будут более подробно описаны с использованием фиг.2. Описание применимо как к опорному приемнику С первой навигационной системы, так и к опорному приемнику С" второй навигационной системы, хотя практические воплощения могут отличаться друг от друга. Опорный приемник С.2 содержит контроллер С.1 для управления его функционированием. Контроллер С.1 содержит, например, процессор, микропроцессор, цифровой процессор сигналов (Digital Signal Processor, DSP) или комбинацию этих элементов. Очевидно, что в контроллере С.1 могут быть более одного процессора, микропроцессора, процессора DSP и т.д. Имеется также блок С.2 приема, содержащий приемник С.2.2 для приема сигналов со спутников S1, S2 навигационной системы. Опорный приемник С также содержит блок связи С.3 для прямого или косвенного обмена информацией с использованием сетевого элемента М сети связи Р. Блок связи С.3 содержит передатчик С.3.1 для передачи сигналов в сетевой элемент М и, если это необходимо, приемник С.3.2 для приема сигналов, переданных сетевым элементом М в опорный приемник С. Опорный приемник С может также содержать память С.4 для хранения данных и программного обеспечения (компьютерного программного кода).
Структура примера воплощения сетевого элемента М изображена на фиг.3. Сетевой элемент М содержит контроллер М.1. Контроллер М.1 сетевого элемента может быть создан на базе процессора, микропроцессора, процессора DSP или комбинации этих элементов. Очевидно, что в контроллере М.1 может быть более одного процессора, микропроцессора, процессора DSP и т.д. Сетевой элемент М может взаимодействовать с опорным приемником С посредством первого блока связи М.2. Первый блок связи М.2 содержит приемник М.2.2 для приема сигналов от опорных приемников С навигационной системы. Первый блок связи М.2 может также содержать передатчик М.2.1 для передачи, например, сообщений запросов в опорный приемник С навигационной системы. Сетевой элемент М также содержит второй блок связи С.3 для взаимодействия с базовыми станциями В или другими точками доступа сети связи Р. Второй блок связи М.3 содержит передатчик М.3.1 для передачи сигналов на базовые станции В и приемник М.3.2 для приема сигналов, переданных базовыми станциями В сетевому элементу М. Сетевой элемент М также содержит память М.4 для хранения данных и программного обеспечения (компьютерного программного кода).
Сетевой элемент М получает поддерживающие данные или из радиопередач спутников посредством использования опорного приемника С или посредством некоторого другого внешнего решения, например из сервера поддерживающих данных X, предназначенного для сбора и передачи такой информации в сети связи. Сервер поддерживающих данных Х содержит элементы, аналогичные сетевому элементу М в отношении операций, относящихся к приему навигационных данных, формированию и передаче поддерживающих данных (т.е. приемник М.2.2, контроллер М.1, передатчик М.3.1 и память М.4). Сервер поддерживающих данных Х может также содержать элементы опорного приемника С.2. Сервер поддерживающих данных Х является, например, сервером коммерческого поставщика услуг, из которого могут быть запрошены поддерживающие данные, возможно за плату.
Опорный приемник С не обязательно является отдельным устройством, размещенным за пределами сети связи Р, но может быть частью сетевого элемента М.
В другом примере воплощения сервер поддерживающих данных Х может также анализировать сигналы, принятые опорным приемником С (который может также быть частью сервера поддерживающих данных X), и определять, правильно ли функционирует сигнал/спутник.
На фиг.4 представлено в виде упрощенной блок-схемы устройство R в соответствии с примером воплощения данного изобретения. Устройство R содержит один или более приемников позиционирования R.3 для приема сигналов от поддерживающих станций 81, 82 одной или более навигационных систем. Это может быть один приемник позиционирования R.3 для каждой навигационной системы, поддержка которой предполагается устройством R, или возможно использование одного приемника позиционирования R.3 для выполнения позиционирования на базе сигналов от более чем одной навигационной системы. Устройство R также содержит контроллер R.1 для управления работой устройства R. Кроме того, контроллер R.1 сетевого элемента может быть создан на базе процессора, микропроцессора, процессора DSP или комбинации этих элементов. Очевидно, что может также использоваться более одного процессора, микропроцессора, процессора DSP и т.д. Также возможно, что приемник позиционирования R.3 может содержать управляющий элемент R.3.1 (например, процессор, микропроцессор и/или процессор D8P) или приемник позиционирования R.3 использует при позиционировании контроллер устройства R. Возможно также, что некоторые из операций позиционирования выполняются управляющим элементом R.3.1 приемника позиционирования R.3, а некоторые другие операции позиционирования выполняются контроллером R.1 устройства. Устройство R может обмениваться информацией с базовой станцией В сети связи Р посредством блока связи R.2. Блок связи R.2 содержит приемник R.2.2 для сигналов, принимаемых из базовой станции В сети связи Р. Блок связи М.2 также содержит передатчик R.2.1 для сообщений, передаваемых на базовую станцию В сети связи Р. Данные и программное обеспечение могут храниться в памяти R.4 устройства. Устройство R также обеспечивается пользовательским интерфейсом R.5 (UI), который содержит, например, дисплей R.5.1, клавишную панель R.5.2 (и/или клавиатуру) и средства для звукозаписи и воспроизведения звука R.5.3, такие как микрофон и громкоговоритель. Возможно также, что устройство имеет более одного пользовательского интерфейса.
Устройство R является, например, устройством мобильной связи, предназначенным для обмена информацией с сетью связи Р известным образом. Пользовательский интерфейс R.5 может быть общим для мобильной части связи и для приемника позиционирования R.3.
Ниже будет показан не ограничивающий изобретение пример полей информационного элемента целостности в реальном времени (Real-Time Integrity) с использованием ссылки на таблицу 1. В таблице 1 приводятся соответствующие количества битов. В соответствии с данным изобретением предполагается, что поле Real-Time Integrity используется для передачи данных о степени исправности спутника в устройство R.
Поле Real-Time Integrity информационного элемента поддерживающих данных (Assistance Data Information Element) системы GNSS содержит параметры, описывающие в реальном времени статус созвездий GNSS. Первоначально предназначенный для недифференциальных применений параметр целостности созвездия спутников в реальном времени имеет большое значение, так как отсутствуют отличительные поправочные данные, с помощью которых устройство R может определить бездефектность каждого спутникового сигнала. Данные целостности спутников в реальном времени (Real-Time Satellite Integrity) уведомляют устройство R о возможных дефектах в работе спутника(ов) созвездий системы GNSS в реальном времени или почти в реальном времени. Сетевой элемент М должен передавать поле Real Time Integrity вместе с текущим списком дефектных сигналов при любой попытке позиционирования системы A-GNSS и всякий раз, когда отправляются поддерживающие данные A-GNSS. Если число дефектных сигналов (Number of Bad Signals, NBS) равно нулю, поле Real Time Integrity будет опущено. Когда информационный элемент Extended Reference IE включен в сообщение запроса RRLP (Radio Resource Location Protocol) Measure Position Request или в сообщение RRLP Assistance Data, станция MS будет интерпретировать отсутствие поля Real Time Integrity в поддерживающих данных, предоставленных центром SMLC, как нулевое число дефектных сигналов. Если отсутствует Extended Reference, эта интерпретация применяется, когда поддерживающие данные предоставляются сетевым элементом М вслед за предшествующим запросом устройства R о передаче данных Real Time Integrity.
Поле UTC указывает значение скоординированного всемирного времени (UTC), когда список создавался.
Значение NBS указывает номер SSS ID, из которого следует, что устройство R не должно использовать его в это время при определении местоположения. Значение NBS определяется из списка Bad_SSS ID.
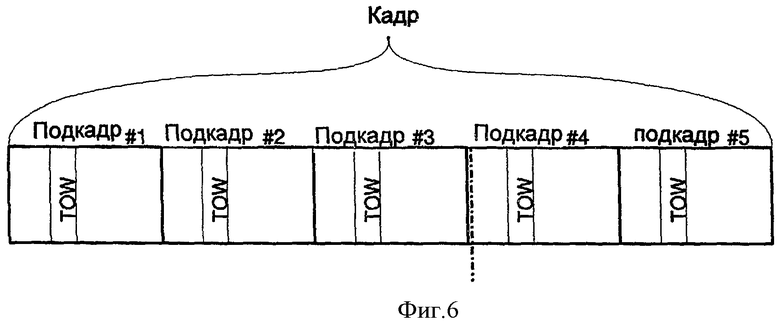
Поле Bad_SSS ID используется для указания системы, индекса спутника SSS ID, параметров SV/Slot и Signal ID для сигнала спутника, который функционирует неправильно. Так как индикация содержит информацию о спутниковой системе, поле Bad_SSS ID обычно может использоваться для указания других сигналов позиционирования других спутников и других спутниковых систем. Это поле SSS ID является 14-битовым полем, разделенным на 3 следующих подполя:
первые три бита формируют поле System ID, содержащее номер ID спутниковой системы;
следующие шесть битов формируют поле SV/Slot ID, которое содержит индекс спутника в системе;
и последние пять битов формируют поле Signal ID, содержащее номер ID сигнала позиционирования.
Для поля SSS ID используется следующая битовая маска:
System ID (3 бита, диапазон 0…7): ххх-----------
SV/Slot ID (6 битов, диапазон 0…63): ---хххххх-----
System ID (5 битов, диапазон 0…31): ---------ххххх
Параметр System ID указывает ту спутниковую систему, к которой принадлежит спутник и сигнал. В текущей версии этого интерфейса поддерживаются следующие системы: GPS, Galileo и SBAS, ГЛОНАСС, QZSS и LAAS (псевдоспутники). В таблице 2 приведены соответствия между системой и значением поля System ID.
Поле SV ID - это индекс спутника в спутниковой системе. Параметр SV ID имеет диапазон значений: 0-63. Диапазон значений SV ID начинается от 0 для каждой спутниковой системы. Фактический номер PRN для спутника может быть получен путем добавления конкретного смещения для спутниковой системы к значению SV ID. Смещения определяются в следующей таблице 3.
В случае системы ГЛОНАСС параметр SV ID относится к номеру слота орбиты конкретного спутника.
Однако возможно также использование других осуществлений, отличных от упомянутых выше, чтобы указать информацию, соответствующую неправильно работающим сигналам.
В поле Signal ID указывается один сигнал позиционирования спутника из различных сигналов, выдаваемых спутником. Значение ANY используется в поле Signal ID, когда конкретный спутник выбирается без указания какого-либо сигнала. Это необходимо, например, в информационном элементе целостности в реальном времени, когда передается уведомление о повреждении целостности спутника, а не сведения о неисправности конкретного сигнала.
Сообщение поддерживающих данных навигационной системы содержит также другие поля и информационные элементы помимо, элемента целостности в реальном времени. Однако они не имеют большого значения с точки зрения данного изобретения и нет необходимости в их более подробном рассмотрении.
Когда необходимо передать сообщение поддерживающих данных навигационной системы в сеть связи, например, из сетевого элемента М в устройстве R, информация отображается в одно или более сообщений, применимых в сети связи. Например, в сети связи GSM имеется определенный подход к доставке сообщения (Radio Resource Location Services Protocol, RRLP) для передачи информации, относящейся к местоположению. Этот подход описывается в стандарте 3GPP TS 44.031, который определяет формат поддерживающих данных GPS, используемых для обмена между сетевым элементом М и устройством R. В этом изобретении данный подход может использоваться для отправки более общих данных о степени исправности в устройство R.
В сетевом элементе М доступная навигационная информация, такая как коррекция DGPS/DGNSS, эфемериды и коррекция часов, и данные календаря, отображается в соответствующие поля сообщения(ий) поддерживающих данных. Эфемериды, коррекция часов, календарь и другие данные, относящиеся к конкретному спутнику, получают из навигационного сообщения этого спутника или от внешней службы X. Сообщение принимается опорным приемником С или опорным приемником во внешнем обслуживающем модуле X. Сообщение поддерживающих данных содержит элемент управления шифром (Cipher Control) для указания, является ли информация зашифрованной, элемент последовательного номера шифрования (Ciphering Serial Number) и информационный элемент данных (Data Information Element). Информационный элемент данных (Data IE) переносит навигационную информацию. Этот элемент описывается ниже в таблице 5.
Например, сообщение поддерживающих данных (Assistance Data) сформировано так, что оно соответствует сообщению фиксированной длины, занимая не обязательно все сообщение. Оно может содержать три набора данных: коррекцию DGPS/DGNSS, эфемериды и коррекцию часов, календарь и другие информационные данные. В том случае, когда сообщение фиксированной длины имеет число информационных элементов меньшее, чем количество доступных битов, в оставшуюся часть сообщения помещают биты заполнения. Обычно не разрешаются неопределенные лишние биты между элементами. В примере воплощения канал для пересылки сообщения Assistance Data является, например, каналом СВСН (Control Broadcast Channel - широковещательный канал управления), над которым используется служба SMSCB DRX (SMSCB, Short Message Service Cell Broadcast - вещательная передача службы коротких сообщений в соте; DRX - прерывистый прием). Одно сообщение SMSCB имеет фиксированную длину информационных данных, равную 82 октетам, и максимальную длину данных Assistance Data сети GPS, равную 82 октетам. Устройство R может идентифицировать сообщение LCS SMSCB с помощью идентификаторов Message Identifier, описанных в стандарте 3GPP TS 23.041.
На фиг.5 показан пример поддерживающего сообщения А в соответствии с примером воплощения данного изобретения. Сообщение содержит поле А.1 целостности в реальном времени (Real-Time Integrity). Это поле А.1 Real-Time Integrity содержит поле А.1.1 времени Time (UTC) и одно или более полей А.2 Bad Signal Indication в соответствии с числом дефектных сигналов, о которых должно быть сообщено устройству R. Поле А.2 Bad Signal Indication содержит информацию о спутнике, которому принадлежит дефектный сигнал (А.2.2), о системе, которой принадлежит спутник (А.2.1), а также указание дефектного сигнала (А.2.3). Этот пример поддерживающего сообщения А не содержит явного указания числа дефектных сигналов, но это значение может быть непосредственно получено из числа полей А.2 Bad Signal Indication, включенных в сообщение.
Ниже будет описан пример применения формата поддерживающего сообщения в соответствии с данным изобретением. Сетевой элемент имеет область хранения М.4.1 в памяти М.4 для хранения навигационных данных, полученных от опорного приемника С. Если отсутствуют сохраненные навигационные данные, например, для спутников первой навигационной системы, контроллер М.1 сетевого элемента формирует сообщение запроса (не показано) и передает его в первый блок связи М.2 сетевого элемента. Передатчик М.2.1 выполняет, если это необходимо, протокольные преобразования сообщения и передает сообщение в опорный приемник С первой навигационной системы. Приемник С.3.2 блока связи первого опорного приемника С принимает сообщение, выполняет, если это необходимо, протокольные преобразования и передает сообщение в контроллер С.1 опорного приемника С. Контроллер С.1 исследует сообщение и определяет, что оно является запросом на передачу навигационных данных в сетевой элемент М. Если память С.4 содержит запрошенные навигационные данные, они могут быть переданы в сетевой элемент М, если нет необходимости в обновлении навигационных данных перед передачей.
После обновления навигационных данных контроллер С.1 опорного приемника формирует сообщение, содержащее навигационные данные, и передает его в передатчик С.3.1 второго блока связи первого опорного приемника С. Контроллер С.1 также определяет, имеются ли спутники, которые функционируют неправильно. Контроллер С.1 исследует сигналы от таких дефектных спутников, чтобы определить, имеются ли какие-либо полезные сигналы, которые могут быть приняты с этого спутника. Например, контроллер С.1 может произвести измерения прогнозных ошибок псевдодальности и, если прогнозная ошибка отклоняется от вычисленной прогнозной ошибки более чем на заранее заданную пороговую величину, контроллер С.1 принимает решение о неправильном функционировании спутника. Другим вариантом является сравнение точности эфемеридных данных, переданных спутником, с эталонными данными. Если исследование указывает на то, что имеется по меньшей мере один полезный сигнал от этого спутника, контроллер С.1 формирует указание для каждого из дефектных (т.е. поврежденных) сигналов этого спутника в сообщении поддерживающих данных. Однако, если исследование указывает на то, что поврежденными являются все сигналы дефектного спутника, для этого спутника может быть сформировано специальное значение указания (=«any» (любое)). В этом случае в сообщении поддерживающих данных имеется только одно поле А.2 Bad Signal Indication, относящееся к этому спутнику.
После выполнения, если это необходимо, протокольных преобразований передатчик С.3.1 передает навигационные данные в сетевой элемент М. Приемник М.2.2 сетевого элемента принимает сообщение, выполняет, если это необходимо, протокольные преобразования и передает сообщение в контроллер М.1 сетевого элемента или сохраняет полученные в сообщении навигационные данные непосредственно в памяти М.4 сетевого элемента. Память может содержать определенные области (М.4.1 и М.4.2 на фиг.3) для хранения навигационных данных спутников различных навигационных систем. Следовательно, данные сохраняются в области, зарезервированной для навигационной системы, от которой получены навигационные данные.
Поддерживающие данные могут быть переданы устройству R или по запросу или путем широковещательной передачи, например, по управляющему каналу сети связи Р. В системе GSM определен формат сообщения GPS Assistance Data Broadcast Message (вещательная передача данных поддержки GPS), который может использоваться в таких широковещательных передачах для GPS. Поддерживающие данные включаются в сообщение с использованием формата, определенного в этом изобретении. Например, контроллер М.1 сетевого элемента М проверяет (М.1.1), имеются ли какие-либо указания дефектных сигналов, и, если проверка указывает на то, что имеется по меньшей мере один поврежденный сигнал, контроллер М.1 формирует поле А.1 Real-Time Integrity и вставляет (М.1.2) в него поле А.2 Bad Signal Indication для дефектных сигналов/спутников. Затем контроллер М.1 создает сообщение поддерживающих данных, содержащее поле А.1 Real-Time Integrity, для передачи на устройство R.
Здесь следует отметить, что определение времени в этом формате поддерживающих данных отличается от используемого в настоящее время времени в сети GPS. Как отмечалось ранее, например, время GPS возвращается к начальной точке каждую неделю. При новом определении времени это не делается. Кроме того, способ определения времени является несущественным с точки зрения данного изобретения.
Контроллер может просматривать навигационные данные первой навигационной системы, сохраненные в первой области хранения М.4.1, чтобы, когда это требуется, сформировать другие сообщения поддерживающих данных для передачи других навигационных данных.
Когда формируется сообщение поддерживающих данных А, оно может быть передано в сеть связи. Контроллер М.1 передает данные в область хранения сообщения поддерживающих данных М.4.3 во втором блоке связи М.3 сетевого элемента. Передатчик М.3.1 второго блока связи сетевого элемента М выполняет необходимые операции для формирования сигналов, несущих поддерживающие данные, и передает сигналы в сеть связи Р.
Сигналы принимаются приемником R.2.2 блока связи устройства R. Приемник R.2.2 демодулирует данные из принятых сигналов и, например, передает данные в контроллер R.1 устройства R. Контроллер R.1 сохраняет данные в памяти R.4 устройства R и анализирует поддерживающие данные (R.1.1). Исследование включает определение полей А.2 Bad Signal Indication (R.1.2) (если они имеются). Как отмечалось выше, устройство R может сделать вывод о числе дефектных сигналов исходя из количества полей А.2 Bad Signal Indication, включенных в это сообщение. Индикация дефектных сигналов может быть передана в приемник позиционирования R.3, например, через выходную линию R.1.3 контроллера R.1. Однако возможно, что контроллер R.1 также используется в операциях позиционирования, когда нет необходимости в передаче данных (указании дефектных сигналов и/или числа дефектных сигналов) в приемник позиционирования R.3, но контроллер R.1 может использовать данные, сохраненные в памяти R.4.
Память R.4 может включать область хранения R.4.1 для хранения навигационных данных, принятых в сообщениях поддерживающих данных, а также для хранения указания дефектных сигналов. В некоторых ситуациях навигационные данные могут быть получены со спутников посредством демодулирования полученных от них сигналов.
Когда поддерживающие данные извлекают из записи(ей) поддерживающих данных, они могут быть сохранены в памяти и использованы при позиционировании. Например, когда приемник позиционирования R.3 может только демодулировать сигналы одного или двух спутников, приемник позиционирования R.3 может сам использовать поддерживающие данные для выполнения позиционирования.
Когда приемнику позиционирования R.3 необходимо использовать навигационные данные одного или более спутников, он также проверяет информацию, относящуюся к полю целостности в реальном времени, чтобы определить, имеются ли какие-либо сигналы от спутников, которые функционируют неправильно, и пытается использовать вместо них другие сигналы/спутники.
Устройство R может выполнить позиционирование на определенных интервалах или в случае выполнения заранее заданного условия. Заранее заданное условие может включать, например, одну или более из следующих ситуаций: пользователь инициирует вызов, например, центра экстренных ситуаций; пользователь выбирает операцию позиционирования в меню устройства R; устройство R и сеть связи Р выполняют переключение на другую соту сети связи Р; сеть связи Р посылает запрос позиционирования в устройство R и так далее.
Возможно также, что сеть связи, например сетевой элемент М, запрашивает устройство R для выполнения позиционирования. Запрос может быть отправлен с использованием механизма доставки сообщений RRLP. Ответ также может быть отправлен с использованием механизма доставки сообщений RRLP.
Когда выполняется позиционирование, приемник позиционирования R.3 или контроллер R.1 устройства может определить, имеется ли достаточное количество новейших навигационных данных, хранящихся в памяти R.4. Если некоторые навигационные данные устарели (т.е. они стали устаревшими по отношению к заданному времени), или отсутствуют какие-либо необходимые навигационные данные, устройство может формировать и отправлять сообщение запроса в сеть связи Р, например, на базовую станцию В, которая пересылает сообщение запроса в сетевой элемент М. Сетевой элемент М собирает запрошенные навигационные данные и формирует ответное сообщение. Затем ответное сообщение передается через обслуживающую базовую станцию В в устройство R. Приемник R.2.2 блока связи R.2 устройства принимает и демодулирует ответное сообщение, чтобы извлечь навигационные данные. Навигационные данные сохраняются, например, в области хранения навигационных данных R.4.1 памяти R.4.
Следует отметить, что указанное навигационное поддерживающее сообщение содержит различные элементы (а именно, toe_MSB, интервал соответствия, IOD, toc, tGD, toe, r0, r1), которые, несомненно, являются важными для правильного функционирования модели навигации, но не являются существенными с точки зрения этого изобретения. Например, момент начала отсчета для модели может быть задан различными способами (в данное время, toe_MSB, toc и toе), но изменение не влияет на функциональность передачи информации о степени исправности космического аппарата. Параметры, которые не имеют большого значения с точки зрения данного изобретения, приводятся только для полноты описания.
Следует также подчеркнуть, что фактическое число битов и масштабные коэффициенты являются предметом изменений в случае появления новых спецификаций или модификаций. Изменение числа битов и/или масштабных коэффициентов не меняет сущности изобретения. Например, добавление разрешения в компоненты скорости не будет отличающимся изобретением. В качестве другого примера рассмотрим параметр SS ID. Используемый в настоящее время в стандартах способ индексации позволяет проводить различие только между спутниками системы GPS. Предложенный теперь параметр SS ID содержит информацию о системе и спутнике. Эти два значения могут быть отражены в одном и том же поле, но в этом нет необходимости (если система определяется в каком-то другом поле). Следовательно, простая модификация полей также не может изменить сущность изобретения.
Сеть связи Р может быть беспроводной сетью, проводной сетью или комбинацией данных сетей. Выше уже упоминались не ограничивающие изобретение примеры сетей связи, но здесь можно также указать на сети WLAN и WiMax.
Операции различных элементов системы могут выполняться по большей части посредством программного обеспечения, то есть контроллеры элементов функционируют на базе компьютерных инструкций. Несомненно, некоторые операции или их часть могут быть жестко запрограммированы, то есть реализованы аппаратно.
Изобретение относится к навигационным системам и элементам. Согласно изобретению сетевой элемент (М) для формирования поддерживающих данных содержит управляющий элемент (М.1) для формирования поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы, и передающий элемент (М.3.1) для передачи поддерживающих данных через сеть связи (Р) в устройство (R). Устройство (R) для позиционирования содержит приемник позиционирования (R.3) для выполнения позиционирования на основе одного или более сигналов, переданных опорными станциями (S1, S2) по меньшей мере одной упомянутой спутниковой навигационной системы; приемник (R.2.2) для приема поддерживающих данных, относящихся по меньшей мере к одной навигационной системе, от сетевого элемента (М); и элемент (R.1.1) для исследования, адаптированный для исследования принятых поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий пригодность сигнала для использования. Устройство (R) адаптировано так, чтобы не использовать для позиционирования такой сигнал, который указан в качестве непригодного для использования. Техническим результатом является повышение точности определения местоположения путем предоставления устройству позиционирования списка дефектных сигналов, передаваемых конкретным спутником. 10 н. и 19 з.п. ф-лы, 6 ил., 5 табл.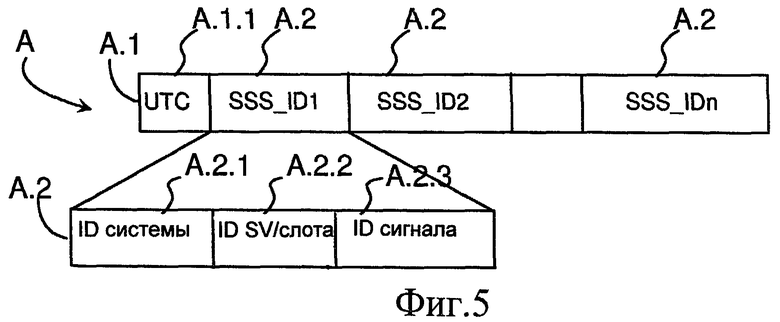
1. Устройство (R) для позиционирования, содержащее элемент (R.1.1) для исследования принятых поддерживающих данных, относящихся по меньшей мере к одной навигационной системе;
отличающееся тем, что упомянутый элемент (R.1.1) для исследования адаптирован для исследования поддерживающих данных так, чтобы обнаружить информацию, относящуюся к статусу одного или более сигналов опорных станций (S1, S2) по меньшей мере одной навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий пригодность сигнала к использованию, причем устройство (R) адаптировано так, чтобы не использовать для позиционирования такой сигнал, который указан в качестве непригодного для использования.
2. Устройство (R) по п.1, отличающееся тем, что упомянутая информация, относящаяся к статусу, передается в сообщении, содержащем поле Real-Time Integrity (Целостность в Реальном Времени) (A.1), где упомянутый элемент (R.1.1) для исследования адаптирован для исследования поля Real-Time Integrity (A.1), чтобы определить число сигналов, которые указаны как непригодные для использования, и идентифицировать сигналы, указанные как непригодные для использования.
3. Устройство (R) по п.2, отличающееся тем, что упомянутое поле Real-Time Integrity (A.1) содержит одно поле Bad Signal Indication (Индикация Дефектного Сигнала) (А.2) для каждого непригодного для использования сигнала, и упомянутый элемент (R.1.1) для исследования содержит определяющий элемент (R.1.2), адаптированный для проверки числа полей Bad Signal Indication (А.2) в поле Real-Time Integrity (A.1), чтобы определить количество сигналов, указанных как непригодные для использования.
4. Устройство (R) по п.3, отличающееся тем, что упомянутое поле Bad Signal Indication (А.2) содержит указание на опорную станцию (S1, S2), к которой относится сигнал.
5. Устройство (R) по п.4, отличающееся тем, что упомянутому указанию на опорную станцию (S1, S2), к которой относится сигнал, назначается заранее заданное значение, чтобы указать на то, что все сигналы одной опорной станции (S1, S2) являются непригодными для использования, при этом упомянутое поле Real-Time Integrity (A.1) содержит только одно поле Bad Signal Indication (А.2) для такой опорной станции (S1, S2).
6. Устройство (R) по любому из пп.3-5, отличающееся тем, что упомянутый определяющий элемент (R.1.2) адаптирован, чтобы определить, что все сигналы навигационной системы являются пригодными для использования, когда проверка указывает на то, что отсутствуют поля Bad Signal Indication (А.2) в поле Real-Time Integrity.
7. Устройство (R) по любому из пп.1-5, отличающееся тем, что приемник позиционирования адаптирован для приема сигналов от по меньшей мере двух различных навигационных систем.
8. Устройство (R) по любому из пп.1-5, отличающееся тем, что упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, содержит указание на навигационную систему, к которой относятся поддерживающие данные, при этом элемент (R.1.1) для исследования адаптирован так, чтобы определить упомянутое указание навигационной системы.
9. Устройство (R) по любому из пп.1-5, отличающееся тем, что оно является устройством мобильной связи.
10. Сетевой элемент (М) для формирования поддерживающих данных, содержащий управляющий элемент (M.1) для формирования поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что сетевой элемент (М) также содержит элемент (M.1.1) для исследования статуса упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, чтобы определить пригодность сигнала для позиционирования устройства (R);
и управляющий элемент (M.1) адаптирован для вставки в поддерживающие данные, для каждого сигнала, который определен элементом (M.1.1) для исследования как непригодный для позиционирования устройства (R), указания о непригодности сигнала, при этом упомянутое указание содержит информацию о сигнале и об опорной станции (S1, S2), к которой относится сигнал.
11. Сетевой элемент (М) по п.10, отличающийся тем, что управляющий элемент (M.1) адаптирован так, чтобы формировать сообщение, содержащее поле Real-Time Integrity (A.1), где упомянутое поле Real-Time Integrity (A.1) содержит упомянутое указание на непригодность для каждого сигнала, который элемент (M.1.1) для исследования определил как непригодный для использования при позиционировании устройства (R).
12. Сетевой элемент (М) по п.11, отличающийся тем, что управляющий элемент (M.1) адаптирован так, чтобы формировать одно поле Bad Signal Indication (A.2) для каждого непригодного для использования сигнала в упомянутом поле Real-Time Integrity (A.1).
13. Сетевой элемент (М) по п.12, отличающийся тем, что управляющий элемент (M.1) адаптирован так, чтобы включать в упомянутое поле Bad Signal Indication (A.2) упомянутое указание на опорную станцию (S1, S2), к которой относится сигнал.
14. Сетевой элемент (М) по п.13, отличающийся тем, что управляющий элемент (M.1) адаптирован так, чтобы назначать заранее заданное значение упомянутому указанию на опорную станцию (S1, S2), к которой относится сигнал, для указания на то, что все сигналы одной опорной станции (S1, S2) являются непригодными для использования, и формировать для такой опорной станции (S1, S2) только одно поле Bad Signal Indication (A.2) в упомянутом поле Real-Time Integrity (A.1).
15. Сетевой элемент (М) по любому из пп.10-14, отличающийся тем, что сетевой элемент (М) также содержит приемник (М.2.2) для приема навигационных данных по меньшей мере одной спутниковой навигационной системы.
16. Сетевой элемент (М) по любому из пп.10-14, отличающийся тем, что он является центром мобильной коммутации системы GSM.
17. Сетевой элемент (М) по любому из пп.10-14, отличающийся тем, что упомянутые поддерживающие данные относятся по меньшей мере к одной из следующих систем:
глобальной системе позиционирования (Global Positioning System);
системе ГЛОНАСС;
системе Galileo;
системе Quasi-Zenith Satellite System;
системе корректировки на базе спутников (Space Based Augmentation System); или
системе локальной корректировки (Local Area Augmentation System).
18. Сетевой элемент (М) по любому из пп.10-14, отличающийся тем, что он является сетевым элементом одной из следующих сетей:
сеть связи GSM;
сеть связи UMTS;
сеть связи CDMA;
сеть связи W-CDMA;
сеть связи WLAN;
сеть связи WiMax.
19. Система для позиционирования, содержащая: сетевой элемент (М), который содержит управляющий элемент (M.1) для формирования поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы; и передающий элемент (М.3.1) для передачи поддерживающих данных в сеть связи (Р); устройство (R), которое содержит приемник позиционирования (R.3) для выполнения позиционирования на основе одного или более сигналов, передаваемых опорными станциями (S1, S2) по меньшей мере одной упомянутой спутниковой навигационной системы; приемник (R.2.2) для приема упомянутых поддерживающих данных из сети связи (Р); и элемент (R.1.1) для исследования принятых поддерживающих данных;
отличающаяся тем, что сетевой элемент (М) системы также содержит элемент (M.1.1) для исследования принятых навигационных данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала к использованию;
и управляющий элемент (M.1) адаптирован для вставки в поддерживающие данные, для каждого сигнала, который элемент (M.1.1) для исследования определил в качестве непригодного к использованию при позиционировании устройства (R), указания на непригодность сигнала к использованию, причем упомянутое указание содержит информацию об этом сигнале и об опорной станции (S1, S2), к которой относится сигнал;
а упомянутый элемент (R.1.1) для исследования в устройстве (R) адаптирован для исследования поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорной станции (S1, S2) навигационной системы, где упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала к использованию, причем устройство (R) адаптировано так, чтобы не использовать для позиционирования такой сигнал, который указан в качестве непригодного для использования.
20. Система по п.19, отличающаяся тем, что она также содержит приемник (М.2.2) для приема сигналов опорных станций (S1, S2) по меньшей мере одной спутниковой навигационной системы.
21. Система по п.19 или 20, отличающаяся тем, что она также содержит приемник (М.2.2) для приема навигационных данных по меньшей мере одной спутниковой навигационной системы с сервера поддерживающих данных (X).
22. Модуль (R.1) для устройства позиционирования, содержащий элемент (R.1.1) для исследования принятых поддерживающих данных, относящихся по меньшей мере к одной спутниковой навигационной системе;
отличающийся тем, что упомянутый элемент (R.1.1) адаптирован для исследования поддерживающих данных так, чтобы обнаружить информацию, относящуюся к статусу одного или более сигналов опорных станций (S1, S2) по меньшей мере одной навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала для использования, и модуль также имеет выход (R.1.3) для формирования указания на такой сигнал, который указан как непригодный для использования.
23. Способ передачи поддерживающих данных в устройство (R), включающий: формирование поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что способ также содержит исследование статуса одного или более сигналов опорных станций (S1, S2) по меньшей мере одной навигационной системы, чтобы определить пригодность сигнала к использованию для позиционирования устройства (R); и вставку в поддерживающие данные, для каждого сигнала, который определен при исследовании как непригодный для использования при позиционировании устройства (R), указания о непригодности сигнала к использованию, при этом упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
24. Способ использования поддерживающих данных при позиционировании устройства (R), включающий: формирование поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что способ также содержит исследование принятых поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, при этом упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала для использования; и исключение сигнала, который указан как непригодный для использования, из сигналов, используемых при позиционировании устройства (R).
25. Память для хранения компьютерной программы, имеющей исполняемые на компьютере инструкции для формирования поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающаяся тем, что компьютерная программа также включает исполняемые на компьютере инструкции для
исследования статуса одного или более сигналов опорных станций (S1, S2) по меньшей мере одной навигационной системы, чтобы определить пригодность сигнала для использования при позиционировании устройства (R);
вставки в поддерживающие данные, для каждого сигнала, который определен при исследовании как непригодный для использования при позиционировании устройства (R), указания о непригодности сигнала к использованию, при этом упомянутое указание содержит информацию о сигнале и об опорной станции, к которой относится сигнал.
26. Память для хранения компьютерной программы, имеющей исполняемые на компьютере инструкции для приема поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что компьютерная программа также включает исполняемые на компьютере инструкции для исследования принятых поддерживающих данных, чтобы обнаружить информацию, относящуюся к статусу упомянутых одного или более сигналов опорных станций (S1, S2) навигационной системы, упомянутая информация, относящаяся к статусу упомянутых одного или более сигналов опорных станций (S1, S2), содержит указание на опорную станцию (S1, S2), к которой относится сигнал, и упомянутый статус, указывающий на пригодность сигнала для использования; и исключение такого сигнала, который указан как непригодный для использования, из сигналов, используемых для позиционирования устройства (R).
27. Считываемый процессором носитель записи, на котором записан сигнал для доставки поддерживающих данных в устройство (R), где указанный сигнал содержит поддерживающие данные, относящиеся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что сигнал также содержит, для каждого сигнала опорной станции (S1, S2), непригодного для позиционирования, указание о непригодности сигнала к использованию, при этом упомянутое указание содержит информацию о сигнале и об опорной станции (S1, S2), к которой относится сигнал, использование которого в устройстве реализует способ использования поддерживающих данных при позиционировании устройства,
28. Сервер поддерживающих данных (X), содержащий управляющий элемент (M.1) для формирования поддерживающих данных, относящихся к одной или более опорным станциям (S1, S2) по меньшей мере одной навигационной системы;
отличающийся тем, что сервер поддерживающих данных (X) также содержит элемент (M.1.2) для исследования статуса одного или более сигналов опорных станций (S1, S2) навигационной системы, чтобы определить пригодность сигнала для позиционирования устройства (R);
при этом управляющий элемент (M.1) адаптирован для вставки в поддерживающие данные для каждого сигнала, который элемент (M.1.1) для исследования определил как непригодный для позиционирования устройства (R), указания о непригодности сигнала к использованию, причем упомянутое указание содержит информацию о сигнале и об опорной станции (S1, S2), к которой относится сигнал.
29. Сервер поддерживающих данных (X) по п.28, отличающийся тем, что он также содержит приемник (М.2.2) для приема сигналов базовых станций (S1, S2) по меньшей мере одной спутниковой навигационной системы.
| US 5440582 А, 08.08.1995 | |||
| НОСИТЕЛЬ ЗАПИСИ, СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПИСИ ИНФОРМАЦИОННЫХ ФАЙЛОВ И УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ С ТАКОГО НОСИТЕЛЯ ЗАПИСИ | 1991 |
|
RU2073913C1 |
| ЭЛЕКТРОМАГНИТНЫЙ РЕГИОНАЛЬНЫЙ ОДНОКОМПОНЕНТНЫЙ СТИМУЛЯТОР | 1995 |
|
RU2067462C1 |
| WO 2005008273 А1, 27.01.2005. | |||

