Уровень техники
Данное изобретение относится в общем к определению местоположения, а более конкретно к позиционированию с помощью сигналов от региональных спутниковых систем.
Глобальные навигационные спутниковые системы (GNSS) предоставляют данные позиционирования пользователям по всему миру. С помощью информации от различных GNSS-спутников возможно определять местоположение в глобальной зоне покрытия и синхронизироваться со временем спутника.
Совсем недавно были созданы региональные спутниковые системы в дополнение к существующим GNSS-системам. Региональные спутниковые системы обслуживают конкретные части мира и, среди прочего, помогают улучшать точность, целостность и доступность глобального спутникового позиционирования в своих соответствующих областях обслуживания.
Мобильные устройства становятся все более доступными и могут принимать и обрабатывать сигналы как от глобальных, так и от региональных спутниковых систем. По своей природе эти устройства изменяют местоположение и могут, следовательно, перемещаться в и из зон покрытия различных региональных спутниковых систем.
В результате мобильное устройство может искать региональный искусственный спутник, который недоступен из его текущего местоположения. Этот бесполезный поиск тратит время, энергию и функциональные возможности поиска и, таким образом, ухудшает эффективность позиционирования. В качестве альтернативы, мобильное устройство может быть запрограммировано, чтобы ожидать до тех пор, пока координаты местоположения не будут получены, перед определением доступности региональных спутников. Это также увеличивает время, необходимое, чтобы получить полностью точную позицию, и приводит в результате к пониженной эффективности.
Раскрытие изобретения
Раскрыты система определения местоположения, способ и устройство. Беспроводное устройство принимает первый сигнал и получает идентификатор, указывающий первое местоположение, из первого сигнала. Первый сигнал может быть принят от сотовой базовой станции, и первый идентификатор может быть мобильным кодом страны. Беспроводное устройство использует идентификатор, чтобы определять доступность сигналов от региональной спутниковой системы в первом местоположении. Если сигналы от региональной спутниковой системы доступны в первом местоположении, беспроводное устройство извлекает информацию, ассоциированную с одним или более искусственными спутниками в региональной спутниковой системе. Информация может сохраняться в беспроводном устройстве и может включать в себя псевдослучайные числовые коды или другие идентификаторы спутников, а также диапазон поиска в доплеровском режиме, соответствующий первому местоположению. Беспроводное устройство обрабатывает спутниковые сигналы от одного или более искусственных спутников и определяет свое местоположение на основе по меньшей мере частично информации, полученной из спутниковых сигналов. Беспроводное устройство может обрабатывать сигналы от региональной спутниковой системы, в то же время обрабатывая сигналы от одной или более спутниковых систем глобального позиционирования.
В одном варианте осуществления раскрывается способ определения местоположения. Способ включает в себя прием первого сигнала и получение идентификатора из первого сигнала, указывающего первое местоположение. Способ также включает в себя извлечение информации, ассоциированной по меньшей мере с одним искусственным спутником с помощью идентификатора, при этом по меньшей мере один искусственный спутник принадлежит региональной спутниковой системе. Способ включает в себя прием второго сигнала и обработку второго сигнала, чтобы получить информацию первого спутникового сигнала по меньшей мере для одного искусственного спутника. Способ включает в себя определение местоположения беспроводного устройства по меньшей мере частично на основе информации первого спутникового сигнала. Способ может включать в себя определение орбитального типа по меньшей мере одного искусственного спутника и извлечение диапазона поиска в доплеровском режиме, соответствующего доплеровскому сдвигу частоты в первом местоположении, если орбитальный тип определен как геосинхронный. Диапазон поиска в доплеровском режиме ограничивает поиск первого спутникового сигнала. В некоторых вариантах осуществления способ включает в себя обработку второго сигнала, чтобы получить информацию второго спутникового сигнала по меньшей мере от одного искусственного спутника, который является частью глобальной навигационной спутниковой системы (GNSS), в то же время получая информацию первого спутникового сигнала.
В одном варианте осуществления раскрывается беспроводное устройство. Беспроводное устройство включает в себя первый приемник, выполненный с возможностью принимать несущий информацию сигнал, имеющий первый идентификатор, указывающий первое местоположение. Беспроводное устройство также включает в себя второй приемник, выполненный с возможностью принимать множество спутниковых сигналов и определять местоположение беспроводного устройства с помощью информации из множества спутниковых сигналов, при этом второй приемник принимает по меньшей мере один из множества спутниковых сигналов с помощью вторых идентификаторов для искусственных спутников, которые являются частью региональной спутниковой системы. Беспроводное устройство также имеет процессор, выполненный с возможностью получать первый идентификатор из несущего информацию сигнала и извлекать вторые идентификаторы из памяти беспроводного устройства на основе первого идентификатора. Процессор может также быть выполнен с возможностью определять орбитальный тип искусственных спутников, которые являются частью региональной спутниковой системы, и извлекать диапазон поиска в доплеровском режиме из памяти, если орбитальный тип является геосинхронным, но необязательно геостационарным. Второй приемник ограничивает поиск несущей частотой по меньшей мере одного из множества спутниковых сигналов на основе диапазона поиска в доплеровском режиме. В некоторых вариантах осуществления второй приемник принимает сигналы от глобальной навигационной спутниковой системы с помощью третьих идентификаторов и одновременно принимает по меньшей мере один из множества спутниковых сигналов с помощью вторых идентификаторов.
В одном варианте осуществления раскрывается способ определения местоположения для мобильного устройства. Способ включает в себя сохранение информации, ассоциированной с искусственными спутниками региональных спутниковых систем, в памяти мобильного устройства и прием наземного сигнала от сотовой базовой станции. Наземный сигнал содержит идентификатор, указывающий первое местоположение. Способ также включает в себя определение доступности первой региональной спутниковой системы в первом местоположении на основе идентификатора и извлечение из памяти псевдослучайного числового кода, соответствующего первому искусственному спутнику первой региональной спутниковой системы, если первая региональная спутниковая система доступна в первом местоположении. Способ включает в себя прием второго сигнала и обработку второго сигнала с помощью псевдослучайного числового кода, чтобы получить информацию первого спутникового сигнала. Способ также включает в себя определение местоположения мобильного устройства по меньшей мере частично на основе информации первого спутникового сигнала.
В одном варианте осуществления раскрывается машиночитаемый носитель, закодированный с помощью одной или более инструкций для обнаружения местоположения беспроводных устройств. Одна или более инструкций включают в себя инструкции, которые, когда исполняются одним или более процессорами, инструктируют одному или более процессоров выполнять этапы приема первого сигнала, получение идентификатора из первого сигнала, указывающего первое местоположение, и извлечение информации по меньшей мере об одном искусственном спутнике с помощью идентификатора. По меньшей мере, один искусственный спутник является частью региональной спутниковой системы. Этапы, выполняемые одним или более процессорами, также включают в себя прием второго сигнала, обработку второго сигнала, чтобы получить информацию первого спутникового сигнала по меньшей мере для одного искусственного спутника, и определение местоположения беспроводного устройства по меньшей мере частично на основе информации первого спутникового сигнала.
Краткое описание чертежей
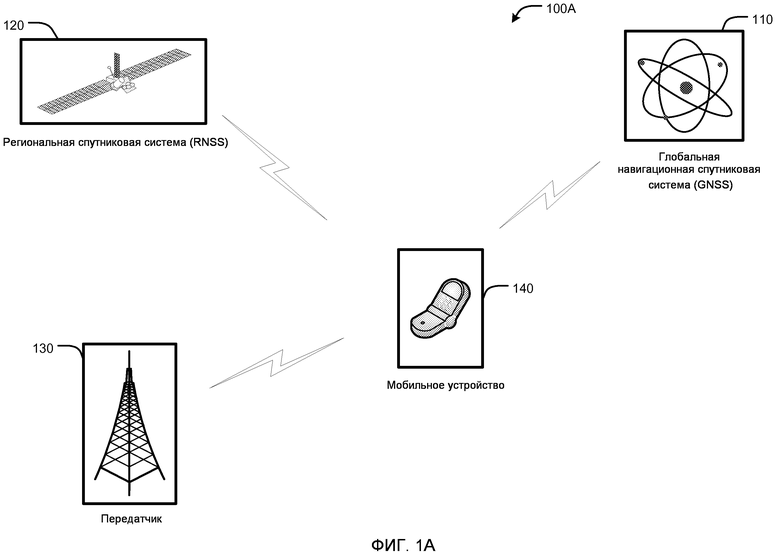
Фиг.1A - это высокоуровневая блок-схема варианта осуществления системы связи, включающей в себя глобальную спутниковую навигационную систему и региональную спутниковую систему.
Фиг.1B показывает дополнительный вариант осуществления системы связи, включающей в себя глобальную навигационную спутниковую систему и две региональные спутниковые системы относительно конкретной географической области.
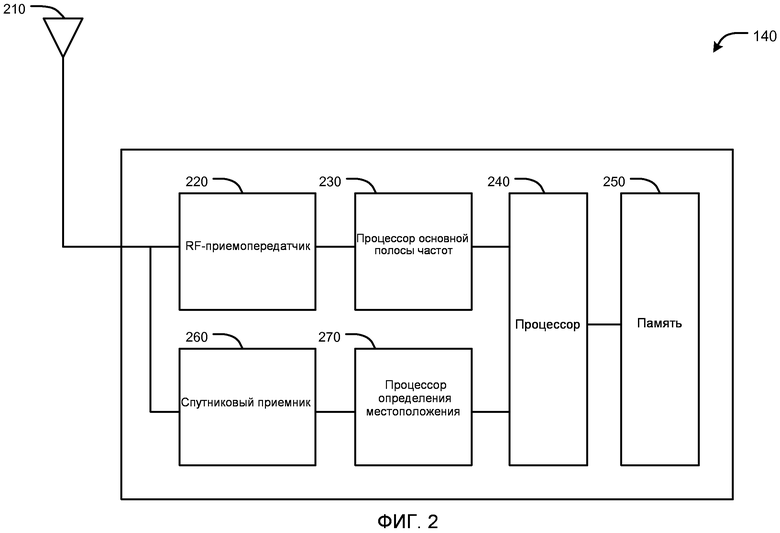
Фиг.2 - это функциональная блок-схема мобильного устройства, которое может быть использовано с системами связи на фиг.1A-1B.
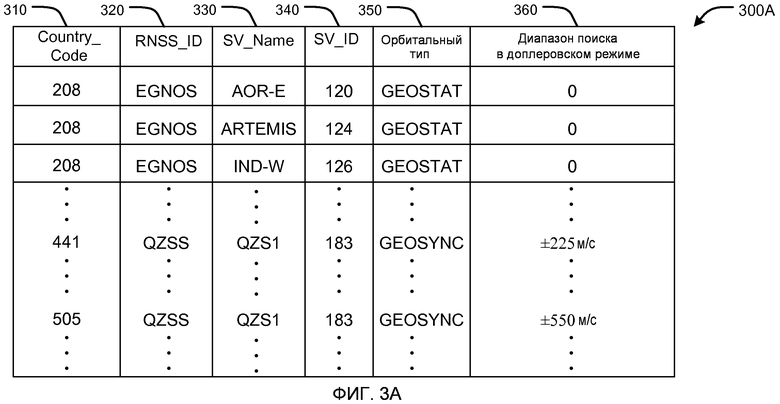
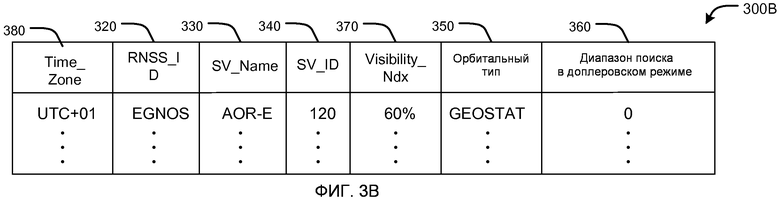
Фиг.3A-3B показывают примерные структуры данных для хранения информации о региональных спутниковых системах.
Фиг.4 - это блок-схема последовательности операций, иллюстрирующая один вариант осуществления способа определения местоположения для использования с беспроводным устройством.
Признаки, характер и преимущества изобретения должны стать более очевидными из изложенного ниже подробного описания, рассматриваемого вместе с чертежами, на которых аналогичные элементы имеют аналогичные номера ссылок.
Осуществление изобретения
Фиг.1 - это высокоуровневая блок-схема системы 100A связи в соответствии с одним вариантом осуществления настоящего изобретения. Как показано, мобильное устройство 140 может принимать сигналы от глобальной навигационной спутниковой системы (GNSS) 110, региональной спутниковой системы (RNSS) 120 и передатчика 130. Мобильное устройство 140 использует информацию, полученную от передатчика 130, чтобы определять доступность спутниковых сигналов от конкретных искусственных спутников RNSS (далее в данном документе также называемых "SV" и "спутники") и ограничивать доплеровский поиск таких спутниковых сигналов. Преимущественно используя информацию от передатчика 130, мобильное устройство 140 выполняет поиск конкретных региональных SV, от которых сигналы наиболее вероятно доступны в его текущем местоположении, прежде чем оно получает координаты местоположения. Дополнительно, мобильное устройство 140 может ограничивать поиск сигналов от региональных SV характерным для местоположения диапазоном поиска в доплеровском режиме.
Глобальная навигационная спутниковая система 110 включает в себя одну или более спутниковых навигационных систем, которые предоставляют данные позиционирования пользователям по всему миру. Например, GNSS 110 может включать в себя систему глобального позиционирования (GPS) для навигации и определения местонахождения спутников, управляемую Соединенными Штатами. В целом, каждый искусственный спутник GPS модулирует несущую, такую как частота L1 (1575,42 МГц), с помощью псевдослучайного числового кода (PRN) и навигационного сообщения. PRN идентифицирует конкретный SV, который передает сигнал, и используется приемником, чтобы определять время между передачей сигнала в искусственном спутнике и временем приема в приемнике, из которого расстояние между спутником и приемником может быть определено и использовано для определения местоположения. Навигационное сообщение содержит информацию об орбите (эфемеридные данные об орбите передающих SV, а также информацию альманаха с приблизительными позициями других SV в группировке спутников GPS) вместе с другой информацией, такой как временная информация (например, время недели или TOW). Хотя GPS-система используется здесь в целях обсуждения, будет понятно, что GNSS 110 может включать в себя другие глобальные спутниковые навигационные системы, такие как система GLONASS, управляемая Россией, система Galileo, разрабатываемая Европейским Союзом, и глобальные спутниковые навигационные проекты, такие как система COMPASS, запланированная для будущего развертывания Китаем. Различные спутниковые системы могут использовать различные схемы для передачи информации, которая должна быть использована для определения местоположения. Например, каждый из спутников системы GLONASS использует один и тот же PRN-код, передаваемый по различным частотным каналам. Однако технологии, описанные в данном документе, не ограничиваются конкретными типами сообщений или схемами передачи.
Региональная спутниковая система 120 включает в себя искусственные спутники, которые дополняют функциональные возможности GNSS 110. Искусственные спутники RNSS обычно имеют либо геостационарные, либо геосинхронные орбиты, и, как результат, они видимы только в определенных частях мира. Другими словами, RNSS 120 обслуживает конкретный географический регион ("зону покрытия"), определенный орбитами ее конкретных спутников. Например, RNSS 120 может включать в себя глобальную систему уточнения и коррекции (WAAS), покрывающую Соединенные Штаты, Европейскую геостационарную службу навигационного покрытия (EGNOS), покрывающую Европу и окружающие регионы, MTSAT спутниковую систему уточнения (MSAS), обслуживающую Японию, и спутниковую систему Quasi-Zenith (QZSS). Будет понятно, что RNSS 120 может также включать в себя другие региональные спутниковые системы, такие как автоматическая система уточнения GPS (GAGAN) и Индийская региональная навигационная спутниковая система (IRNSS), разрабатываемые Индией, и другие похожие системы.
Искусственные спутники в RNSS 120 передают сообщения с данными позиционирования. Типично RNSS-сообщения передаются на той же несущей частоте, что и SV в GNSS 110, но закодированы, чтобы идентифицировать конкретный RNSS-спутник, и используют другой формат сообщения. Региональные спутниковые системы типа WAAS и EGNOS используют наземные станции, чтобы наблюдать за искусственными спутниками GNSS в их соответствующих зонах обслуживания. Наземные станции выгружают корректирующие данные на региональные SV, которые затем передают корректирующие данные в закодированных спутниковых сообщениях. Одним аспектом RNSS 120 является улучшение точности, целостности и надежности глобальных навигационных систем, таких как GPS и GLONASS.
Мобильное устройство 140 является беспроводным устройством, которое может принимать спутниковые позиционирующие и другие сигналы связи. Например, мобильное устройство 140 может быть сотовым телефоном с возможностью определения местоположения. Как показано, мобильное устройство 140 принимает голосовые и информационные сигналы от передатчика 130, такого как сотовая базовая станция. Однако мобильное устройство 140 не ограничивается сотовым телефоном и может также включать в себя персональный цифровой помощник, ноутбук, интеллектуальный телефон и аналогичные устройства связи. В некоторых вариантах осуществления мобильное устройство 140 принимает FM-радиосигналы, сигналы цифрового телевидения и сообщения проводной/беспроводной сети, такой как Ethernet, Wi-Fi, WiMAX (протокол широкополосной радиосвязи) и т.п.
Передатчик 130 предоставляет сигнал с информацией, указывающей его неточное местоположение или зону обслуживания. В примерном варианте осуществления передатчик 130 является сотовой базовой станцией, и ее зона обслуживания идентифицируется посредством кода страны или аналогичных данных. Однако передатчик 130 может включать в себя другие наземные и/или спутниковые ресурсы, такие как FM-радиостанции, трансляции цифрового телевидения и беспроводные или проводные сети передачи данных. В одном варианте осуществления передатчик 130 является беспроводной точкой доступа, которая предоставляет NITZ (идентичность сети и временной пояс) информацию своим клиентам. Мировые (абсолютные) временные пояса, например, соответствуют конкретным географическим регионам и могут, следовательно, служить в качестве идентификаторов местоположения. В другом варианте осуществления передатчик 130 является сервером, который может предоставлять мобильному устройству 140 сетевой адрес или аналогичный идентификатор. Например, поставщик услуг Интернета может назначать клиентскому компьютеру IP (протокол Интернета) адрес, который соответствует приблизительно географическому местоположению.
Мобильное устройство 140 использует информацию о местоположении от передатчика 130, чтобы определять доступность искусственных спутников RNSS 120. Если информация о местоположении указывает страну в Европе, например, тогда мобильное устройство 140 может определять, что оно вероятно находится в зоне покрытия EGNOS и может искать искусственные спутники EGNOS. Аналогично, если информация о местоположении указывает Соединенные Штаты, тогда мобильная станция 140 может определять, что она, вероятно, находится в зоне покрытия WAAS, и может ограничивать свой поиск соответствующим образом. Поскольку искусственные спутники RNSS 120 поддерживают геостационарные или геосинхронные орбиты и предоставляют корректирующие данные для использования в своих конкретных зонах покрытия, мобильное устройство 140 избегает поиска SV, которые невидимы и/или не имеют данных, которые могут быть использованы для того, чтобы определять его местоположение.
В качестве иллюстрации предположим, что мобильное устройство 140 находится где-то в Европе и что оно не имеет координат местоположения. Также предположим, что мобильное устройство 140 испытывает недостаток данных, которые могли бы быть получены из предыдущих координат местоположения, или что предыдущие данные позиционирования стали устаревшими. В этих условиях "холодного" запуска мобильное устройство 140 испытывает недостаток в информации о доступности искусственных спутников RNSS 120. Однако если мобильное устройство 140 приняло сигналы от базовой станции (даже перед текущим состоянием включения электропитания), оно может получить мобильный код страны (MCC) или похожий географический идентификатор. Например, когда активировано, мобильное устройство 140 может автоматически получать сигналы от обслуживающей базовой станции, указывающие, что оно находится где-то в Германии. Используя эту информацию, мобильное устройство 140 определяет, что оно находится в зоне покрытия EGNOS и идентифицирует конкретные EGNOS (региональные) искусственные спутники, от которых оно может принимать данные позиционирования. Это может быть выполнено параллельно с поиском глобальных искусственных спутников в GNSS 110, таким образом, ускоряя процесс получения точных координат местоположения. Альтернативно, мобильное устройство может использовать информацию о техническом состоянии, полученную от множества SV в RNSS 120, чтобы дополнительно уточнять свой поиск GNSS-спутников.
Фиг.1B - это схема, иллюстрирующая аспекты системы 100B связи в конкретной географической области. Как показано, искусственные спутники GNSS 110 и RNSS 120 имеют зону покрытия, которая включает в себя Японию. Мобильное устройство 140 является персональным цифровым помощником (PDA), который принимает сигналы от передатчика 130, а также от глобальных навигационных спутников 110-G и региональных спутников 120-MT, 120-QZ.
В описываемом в настоящий момент варианте осуществления RNSS 120 включает в себя две региональных системы. Первая региональная система - это MTSTAT спутниковая вспомогательная система (MSAS), представленная искусственным спутником 120-MT. MSAS-спутник 120-MT поддерживает геостационарную орбиту над Японией и предоставляет дополнительные данные, как описано выше. Искусственные спутники 120-QZ1, 120-QZ2 являются частью спутниковой системы Quasi-Zenith (QZSS). QZSS-спутники 120-QZ поддерживают геосинхронную орбиту, имеющую зону покрытия (трассу орбиты), протягивающуюся приблизительно от Японии до Австралии. Орбита QZSS-искусственных спутников 120-QZ известна, и, таким образом, их высота и доплеровские характеристики могут быть определены для каждой страны в зоне покрытия.
Мобильное устройство 140 принимает идентификатор от передатчика 130, указывающий географическую область. Как ранее отмечено, различные идентификаторы могут быть использованы и могут иметь изменяющиеся степени точности. Идентификатор мирового часового пояса, например, может указывать только то, что местоположение (Япония) находится в пределах конкретной части Земли по долготе в 15 градусов. С другой стороны, код страны или похожий идентификатор может указывать, что местоположением является Япония или возможно, один из японских островов.
С помощью идентификатора мобильное устройство 140 извлекает информацию о доступности искусственных спутников RNSS 120. В случае Японии мобильное устройство 140 определяет, что и искусственные спутники MSAS, и QZSS доступны в дополнение к глобальным навигационным спутникам GNSS 110. Аналогично мобильное устройство 140 может исключать множество SV в WAAS и EGNOS-системах в качестве возможных кандидатов поиска.
После определения доступности одной или более региональных спутниковых систем, мобильное устройство 140 приоритезирует поиск SV. Например, ожидается, что QZSS-спутники 120-QZ должны передавать обеспечивающие взаимодействие с GPS сигналы для определения местоположения, а также корректирующие данные для GNSS-спутников 110-G в зоне покрытия QZSS. Аналогично орбиты искусственных спутников QZSS будут такими, что по меньшей мере один находится с высоким углом наклона над Токио почти все время. Мобильное устройство 140 может хранить эту и другую информацию о RNSS 120 и ее конкретных SV и может использовать ее, чтобы приоритезировать поиск позиционирующих сигналов.
За пределами доступности региональных спутниковых систем мобильное устройство 140 может осуществлять доступ к информации, с помощью которой может ограничивать поиск сигналов от конкретного регионального искусственного спутника. Это может включать в себя ограничение поиска в доплеровском режиме искусственных спутников QZSS на основе идентификатора местоположения, принятого от передатчика 130. Например, доплеровское смещение частоты сигналов от QZSS-искусственных спутников 120-QZ зависит от местоположения. Как правило, оно равно приблизительно ±250 м/с в Японии, но может достигать ±500 м/с в Австралии. В худшем случае доплеровское смещение QZSS равно приблизительно ±650 м/с. Таким образом, если идентификатор указывает Японию в качестве приблизительного местоположения, диапазон поиска искусственных QZSS-спутников 120-QZ может быть ограничен частотами, соответствующим доплеровским смещениям около ±250 м/с, чтобы значительно улучшать время поиска.
Будет понятно, что настоящее изобретение не ограничивается конкретным географическим регионом или конкретной региональной спутниковой системой. Вместо этого варианты осуществления настоящего изобретения широко охватывают определение доступности RNSS-систем на основе идентификатора местоположения и идентификацию искусственных спутников в доступных RNSS-системах. Также будет понятно, что идентификаторы спутников, такие как псевдослучайные числовые (PRN) коды и номера частотных каналов, могут быть использованы, чтобы идентифицировать конкретные SV в региональной спутниковой системе. Номера частотных каналов, например, могут быть использованы в спутниковых системах типа GLONASS, которые передают сигналы с помощью множественного доступа с частотным разделением каналов (FDMA) или аналогичных технологий. Доступ к информации о доступных RNSS-системах и их спутниках осуществляется для того, чтобы улучшать эффективность поиска и улучшить определение местонахождения позиции. Соответственно, в частности, предполагается, что варианты осуществления настоящего изобретения могут быть использованы с существующими и будущими региональными спутниковыми системами без ограничения.
Фиг.2 - это функциональная блок-схема варианта осуществления мобильного устройства 140. Как показано, мобильное устройство 140 включает в себя RF-приемопередатчик 220 и спутниковый приемник 260, оба соединены с антенной 210. RF-приемопередатчик 220 также соединен с процессором 230 основной полосы частот. На приемном тракте RF-приемопередатчик 220 принимает входящий RF-сигнал и доставляет его контроллеру 230 связи. Процессор 230 основной полосы частот восстанавливает информацию из RF-сигнала. Например, процессор 230 основной полосы частот может демодулировать и декодировать принятый сигнал в дополнение к выполнению других функций обработки сигнала. На передающем тракте процессор 230 основной полосы частот выполняет кодирование и модуляцию данных, принятых от процессора 240, и доставляет исходящий RF-сигнал в RF-приемопередатчик 220.
В различных вариантах осуществления процессор 240 получает идентификатор местоположения из данных, восстановленных процессором 230 основной полосы частот. Как описано выше, идентификатор местоположения может быть кодом страны, передаваемым сотовой базовой станцией, информацией о мировом временном поясе, сетевым адресом или аналогичными данными, указывающими конкретную географическую область. Память 250 хранит информацию для определения доступности одной или более региональных спутниковых систем, а также идентификаторы конкретных региональных искусственных спутников. Дополнительно, память 250 может хранить диапазоны поиска в доплеровском режиме региональных искусственных спутников в конкретных местоположениях. В некоторых вариантах осуществления память 250 включает в себя энергонезависимый запоминающий элемент, такой как флэш-память или питаемое от аккумулятора статическое оперативное запоминающее устройство (SRAM).
Фиг.3A-3B показывают примерные структуры 300 данных, которые могут быть использованы, чтобы доставлять информацию о спутнике в региональной спутниковой системе. Каждая структура данных может включать в себя массив индивидуальных элементов данных и может быть сохранена в памяти 250 для доступа посредством процессора 240. Например, структуры 300 данных могут включать в себя элементы данных для каждого спутника в каждой региональной спутниковой системе. В некоторых вариантах осуществления память 250 хранит несколько разных структур 300 данных, каждая из которых может быть проиндексирована согласно одному или более идентификаторам местоположения и которые могут обновляться процессором 240.
Структура 300A данных включает в себя примерную информацию об искусственных спутниках в региональной спутниковой системе, организованной по значению Country_Code 310 (код страны). Как показано, значения RNSS_ID 320, SV_Name 330 и SV_ID 340 предоставляются для региональных спутников по коду 310 страны. В одном варианте осуществления код 310 страны соответствует списку мобильных кодов стран (MCC), таких как опубликованные в ITU E.212 (Рекомендация 212 от Международного союза электросвязи). RNSS_ID 320 соответствует конкретной региональной спутниковой системе, такой как WAAS, EGNOS, MSAS, QZSS и т.д. SV_Name 330 является названием конкретного искусственного спутника в RNSS, указанной посредством RNSS_ID. SV_ID 340 является идентификатором, таким как псевдослучайный числовой (PRN) код, соответствующий PRN, используемому региональным искусственным спутником, чтобы кодировать свои передачи. Орбиталь 350 указывает, находится ли искусственный спутник (SV_Name) на геосинхронной, геостационарной или другой земной орбите. Для искусственных спутников на геостационарных орбитах диапазон 360 поиска в доплеровском режиме может быть нулевым или пропущен. Иначе, диапазон 360 поиска в доплеровском режиме может указывать значение для использования в ограничении поиска несущего сигнала SV_Name 330 в местоположении, указанном посредством кода 310 страны.
В иллюстративных целях структура 300A данных показана с примерными элементами данных для кода 208 страны (Франция), 441 (Япония) и 505 (Австралия). Франция находится в Европе, и, таким образом, RNSS_ID, соответствующим коду 208 страны, является EGNOS. В региональной спутниковой системе EGNOS искусственные спутники AOR-E, ARTEMIS и IND-W идентифицированы в качестве потенциальных кандидатов поиска местоположений во Франции. Псевдослучайными числовыми кодами искусственных спутников EGNOS являются 120, 124 и 126 соответственно. Как указано, эти искусственные спутники поддерживают геостационарные орбиты (GEOSTAT), и, следовательно, их доплеровские смещения обычно очень малы. Например, доплеровское смещение, ассоциированное с искусственными спутниками WAAS в Соединенных Штатах может быть порядка около ±40 м/с (т.е. сдвиг частоты, соответствующий относительной скорости спутника к/от приемника, около ±40 м/с). Таким образом, в некоторых вариантах осуществления, нулевое значение доплеровского поиска может быть использовано для геостационарных региональных искусственных спутников. В других вариантах осуществления структуры 300 данных могут хранить более точно измеренные значения доплеровского смещения и/или диапазоны поиска в доплеровском режиме для такого регионального искусственного спутника в каждом географическом местоположении.
Как описано выше, Япония находится в зоне покрытия региональных спутниковых систем MSAS и QZSS. Таким образом, код 441 страны включает в себя информацию об искусственных спутниках в обеих региональных спутниковых системах. Примерный элемент данных для Японии указывает доступность искусственного спутника QZS1 в QZSS-системе. Примерный элемент данных также указывает, что данные, переданные посредством QZS1, закодированы с помощью псевдослучайного числового кода 183, что QZS1 находится на геосинхронной (GEOSYNC) орбите, и что диапазон поиска в доплеровском режиме местоположений в Японии равен приблизительно ±225 м/с.
Наконец, примерный элемент данных для кода 505 страны (Австралия) включен для сравнения. Как указано, код 505 страны также находится в зоне покрытия QZSS и может иметь возможность принимать спутниковые сигналы от QZS1 с помощью псевдослучайного числового кода 183. Однако в Австралии может быть необходимым исследовать более широкий диапазон частот для того, чтобы обнаруживать QZS1-сигнал. Таким образом, примерный элемент данных указывает, что спутник QZS1 потенциально доступен для кода 505 страны и что соответствующее значение диапазона поиска в доплеровском режиме равно приблизительно ±550 м/с для этого местоположения.
Фиг.3B показывает альтернативную структуру 300B данных, которая может быть использована, чтобы хранить информацию о доступности и идентичности региональных искусственных спутников. Структура 300B данных может быть сохранена в памяти 250 и, в некоторых случаях, может дополнять или заменять структуру 300A данных. Каждый элемент данных включает в себя поле Time_Zone 380, указывающее соответствующий географический регион. Для каждого временного пояса региональная спутниковая система (RNSS_ID), искусственный спутник (SV_Name) и псевдослучайное число идентифицируются, как обсуждалось ранее. Индекс видимости (Visibility_Ndx 390) также предоставляется. Поскольку мировые временные пояса представляют меридианальные части Земли, видимость спутника может изменяться в пределах конкретного временного пояса.
Чтобы проиллюстрировать этот момент, показан примерный элемент данных для временного пояса UTC+01. UTC+01 включает в себя как Италию, так и Намибию. В то время как EGNOS-спутники видимы из Европы (и частей Северной Африки), они могут быть невидимы где-либо еще на Африканском континенте. Таким образом, Visibility_Ndx 390 предоставляет указание вероятности того, что конкретный региональный спутник видим из местоположений в конкретном временном поясе. Здесь Visibility_Ndx 390 указывает 60% вероятность приема данных позиционирования от спутника AOR-E в местоположениях в пределах UTC+01 временного пояса. Показатель видимости может быть определен согласно населению, площади и другим критериям, относящимся к доступности покрытия в пределах конкретного временного пояса.
Хотя обсуждаются отдельно, следует понимать, что структуры 300A, 300B данных могут быть объединены в одну структуру данных, и что варианты осуществления настоящего изобретения могут включать в себя дополнительные структуры данных с характерной для местоположения информацией о региональных спутниковых системах. Например, примерные структуры данных могут включать в себя множество ключей поиска на основе кода страны, временного пояса, сетевого адреса и аналогичных идентификаторов. Также в целях обсуждения изображается только часть каждой структуры данных. В некоторых вариантах осуществления структуры 300 данных хранят информацию о каждой RNSS-системе и ее спутниках в связи с каждым уникальным значением соответствующих идентификаторов на основе местоположения.
Обращаясь сначала к фиг.2, процессор 240 использует идентификатор местоположения для доступа к структуре данных (например, 300A, 300B) в памяти 250. Если определяется, что одна или более региональных спутниковых систем доступна, процессор 240 предоставляет информацию о множестве ее SV процессору 270 определения местоположения. Среди другой информации процессор 240 может предоставлять псевдослучайные числовые коды (или другие идентификаторы спутников) и доплеровские поисковые значения для каждого регионального SV процессору 270 определения местоположения, чтобы помогать в поиске закодированных спутниковых сигналов. Процессор 240 может также инструктировать показ информации о RNSS и ее SV на экране дисплея мобильного устройства 140. В различных вариантах осуществления процессор 240 отображает карту, соответствующую идентификатору местоположения, на которую наложено относительное местоположение геостационарных SV и/или представление трасс орбит геосинхронных SV.
В некоторых вариантах осуществления процессор 240 выполнен с возможностью обновлять структуры 300 данных в ответ на изменения в региональных спутниковых системах. Например, когда региональные искусственные спутники добавляются или удаляются из конкретной RNSS, процессор 240 может добавлять или удалять элементы данных, соответствующие этим региональным SV. Также, если зона покрытия региональной спутниковой системы изменяется, или если новая региональная спутниковая система становится доступной в конкретном местоположении, процессор 240 может обновлять элементы данных в структурах 300 данных соответствующим образом. Обновления в структурах 300 данных могут выполняться периодически или при необходимости, позволяя мобильному устройству 140 сохранять текущую информацию.
Процессор 270 определения местоположения управляет работой спутникового приемника 260 и определяет местоположение мобильного устройства 140. Процессор 270 определения местоположения принимает параметры, такие как PRN-коды и доплеровские поисковые значения, от процессора 240 и выполняет поиск соответствующих сигналов, принимаемых в спутниковом приемнике 260. В некоторых вариантах осуществления процессор 270 определения местоположения взаимно сопоставляет спутниковые сигналы с сигналом, формируемым локально с помощью PRN конкретного SV. Поскольку PRN-значения соответствуют региональным SV, которые обслуживают географическую местность, возможность нахождения сигналов увеличивается, и мобильное устройство 140, таким образом, избегает поиска региональных SV, которые не предоставляют данных позиционирования для своего текущего местоположения.
Кроме того, процессор 270 определения местоположения минимизирует диапазон Доплера, который необходимо исследовать для того, чтобы обнаруживать требуемый спутниковый сигнал с помощью доплеровских поисковых данных. Например, с GPS-спутниками процессору 270 определения местоположения может быть необходимо исследовать несущие частоты, которые соответствуют доплеровским сдвигам вплоть до ±900 м/с. Т.е. процессору 270 определения местоположения может быть необходимо сопоставлять принятый спутниковый сигнал со сформированными внутренним образом версиями PRN-кода на различных смещениях кода и с различными значениями доплеровского сдвига, охватывающими диапазон возможных доплеровских сдвигов (двухмерный поиск). Максимум в результате сопоставления соответствует конкретному сдвигу кода принятого спутникового сигнала, который может затем быть использован для того, чтобы определять местоположение приемника. Первоначальный поиск ("накопление данных") может быть довольно продолжительным в зависимости от объема информации, доступной процессору 270 определения местоположения. Однако если известно, что конкретный SV находится на геостационарной орбите, этот дополнительный поиск частоты может быть уменьшен или устранен (поскольку относительная скорость спутника к или от приемника является небольшой). Аналогично с геосинхронными SV процессор 270 определения местоположения может ограничивать свой поиск характерным для местоположения доплеровским диапазоном, определенным на основе доплеровского диапазона 360 поиска, который может быть значительно меньше, чем диапазон поиска для глобальных спутниковых систем. Таким образом, процессор 270 определения местоположения может выполнять поиск региональных SV с помощью соответствующих местоположению PRN-кодов и/или других идентификаторов спутников и оптимальных параметров доплеровского поиска.
Будет понятно, что варианты осуществления настоящего изобретения могут выполнять характерный для местоположения поиск искусственных спутников на основе приблизительного географического местоположения, которое может быть получено из наземного источника. Дополнительная информация не требуется, чтобы выполнять поиск. В частности, не нужно сначала получать эфемеридную информацию, альманах или информацию о времени спутника. Эффективность повышается за счет поиска сигналов от региональных искусственных спутников, для которых существует высокая вероятность обнаружения, и недопущения поиска региональных спутников, которые известны как недоступные. Также, время получения спутниковых сигналов может быть уменьшено за счет использования зависящего от местоположения диапазона поиска в доплеровском режиме. В частности, поскольку раскрытая технология уменьшает (или устраняет) пространство поиска доплеровского смещения без необходимости в текущей информации альманаха, эфемеридной или другой зависящей от времени информации об орбите спутника, можно обеспечивать существенное преимущество с точки зрения времени получения в условиях холодного старта. Например, в конкретном варианте осуществления спутниковый приемник может использовать ограниченный диапазон поиска в доплеровском режиме (т.е. меньший, чем минимальный диапазон поиска в доплеровском режиме для GNSS-спутников), чтобы получить информацию о местоположении, ассоциированную с региональным искусственным спутником, прежде чем осуществлять доступ к текущей орбитальной информации спутника (например, текущей информации альманаха, эфемеридной и/или другой орбитальной информации, такой как долговременная орбитальная информация).
Фиг.4 - это блок-схема последовательности операций, показывающая примерный способ 400 определения местоположения для беспроводного устройства. Способ 400 определения местоположения может быть выполнен процессором, таким как процессор 240 и/или процессор 270 определения местоположения. На этапе 410 первый сигнал принимается в беспроводном устройстве. В некоторых вариантах осуществления первый сигнал является наземным сигналом, имеющим идентификатор, указывающий географическое местоположение. Идентификатор может служить, например, в качестве приблизительного указателя области, в которой находится беспроводное устройство.
На этапе 420 идентификатор получается из первого сигнала. После этого на этапе 430 используется идентификатор, чтобы определять доступность региональной спутниковой системы в первом местоположении. Это может подразумевать, например, определение того, находится ли первое местоположение в зоне покрытия одной или более региональных спутниковых систем, таких как WAAS, EGNOS, MSAS и QZSS. Если первое местоположение находится в зоне покрытия одной или более региональных спутниковых систем, извлекается информация о конкретных искусственных спутниках. На этапе 440 идентификатор спутника и диапазон поиска в доплеровском режиме региональных искусственных спутников, определенный как доступный в первом местоположении, извлекаются из памяти или другого запоминающего устройства, доступного беспроводному устройству. В некоторых вариантах осуществления информация о региональных спутниках хранится в энергонезависимой памяти беспроводного устройства.
На этапе 450 второй сигнал, включающий в себя сигналы от одного или более искусственных спутников, принимается в спутниковом приемнике, и выполняется поиск региональных искусственных спутников с помощью информации, извлеченной из памяти. Поиск может включать в себя формирование опорных сигналов в беспроводном устройстве с помощью PRN-кодов для конкретных региональных искусственных спутников и взаимное сопоставление опорных сигналов с сигналами, получаемыми от спутникового приемника, чтобы получить информацию о местоположении. Диапазон поиска в доплеровском режиме может ограничивать частоты, которые исследуются с помощью опорных сигналов. Таким образом, выполняется целевой поиск этих региональных искусственных спутников, обслуживающих первое местоположение, и пространство поиска определяется согласно первому местоположению. Кроме того, поиск региональных спутников на основе местоположения может выполняться параллельно с поиском спутников глобального позиционирования, чтобы дополнительно улучшать результаты поиска.
На этапе 460 местоположение беспроводного устройства определяется с помощью информации, полученной из спутниковых сигналов. Например, местоположение может быть определено согласно хорошо известным технологиям, в которых используется сопоставление, чтобы определять временные сдвиги кода принятых сигналов для множества искусственных спутников, и временные сдвиги кода используются, чтобы определять расстояния между спутниками и приемником, которые, в свою очередь, могут использоваться, чтобы определять местоположение. В некоторых случаях, таких как с QZSS-системой, региональные искусственные спутники сами могут предоставлять достаточные данные позиционирования, чтобы получить координаты местоположения для беспроводного устройства. В других случаях региональные искусственные спутники могут предоставлять только корректирующие данные, которыми можно дополнять позиционирующую информацию, полученную от глобальных искусственных спутников. В некоторых вариантах осуществления один или более спутниковых сигналов могут быть использованы вместе с дополнительной информацией, чтобы получить позицию беспроводного устройства; например, информация времени прохождения сигнала или задержки на полное прохождения сигнала для наземных источников может быть использована вместе со спутниковыми сигналами для определения местоположения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы или выполнены с помощью процессора общего назначения, процессора цифровых сигналов (DSP), процессора с архитектурой на основе сокращенного набора команд (RISC), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, дискретного логического элемента или транзисторной логики, дискретных компонентов аппаратных средств либо любой их комбинации, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессором общего назначения может быть микропроцессор, но в альтернативном варианте процессором может быть любой процессор, контроллер, микроконтроллер или конечный автомат. Процессор также может быть реализован как сочетание вычислительных устройств, к примеру, сочетание DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с ядром DSP либо любая другая подобная конфигурация.
Программный модуль может постоянно размещаться в RAM-памяти, флэш-памяти, энергонезависимой памяти, ROM-памяти, EPROM-памяти, EEPROM-памяти, регистрах, на жестком диске, сменном диске, CD-ROM или любой другой форме носителя хранения данных, известной в данной области техники. Примерный носитель хранения данных соединяется с процессором, так что процессор может считывать информацию и записывать информацию на носитель хранения данных. В альтернативном варианте носитель хранения данных может быть встроен в процессор.
Этапы способа, процесса или алгоритма, описанные в связи с раскрытыми в данном документе вариантами осуществления, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, исполняемом процессором, или в их комбинации. Различные этапы или действия в способе или процессе могут выполняться в показанном порядке или могут выполняться в другом порядке. Дополнительно, один или более этапов процесса или способа могут быть опущены, или один или более этапов процесса или способа могут быть добавлены к способам и процессам. Дополнительный этап, блок или действие могут быть добавлены в начало, конец или между существующими элементами способов и процессов.
Вышеприведенное описание раскрытых вариантов осуществления предоставлено для того, чтобы дать возможность любому обычному специалисту в данной области техники создавать или использовать изобретение. Различные модификации в этих вариантах осуществления будут очевидны для обычных специалистов в данной области техники, а общие принципы, определенные в данном документе, могут быть применены к другим вариантам осуществления, не выходя за рамки сущности или объема изобретения. Таким образом, изобретение не подразумевается ограниченным показанными в данном документе вариантами осуществления, а должно удовлетворять самому широкому объему, соответствующему принципам и новым признакам, раскрытым в данном документе.

Изобретение относится к области радиотехники, а именно к позиционированию с использованием сигналов от региональных спутниковых систем, и может быть использовано в навигационном приемнике. Технический результат заключается в улучшении эффективности поиска спутников, в частности уменьшении времени поиска, без использования дополнительной информации, такой как эфемеридная информация, альманах или информация о времени спутника. Для этого беспроводное устройство принимает первый сигнал и получает идентификатор, указывающий первое местоположение, из первого сигнала. Первый сигнал может быть принят от сотовой базовой станции, и первый идентификатор может быть мобильным кодом страны. Беспроводное устройство использует идентификатор, чтобы определять доступность сигналов от региональной спутниковой системы в первом местоположении. Если сигналы от региональной спутниковой системы доступны в первом местоположении, беспроводное устройство извлекает информацию, ассоциированную с одним или более искусственными спутниками в региональной спутниковой системе. Информация может включать в себя псевдослучайные числовые коды и диапазон поиска в доплеровском режиме, соответствующий первому местоположению. Беспроводное устройство принимает второй сигнал и обрабатывает второй сигнал, чтобы получить информацию первого спутникового сигнала. Беспроводное устройство определяет свое местоположение по меньшей мере частично на основе информации первого спутникового сигнала, 4 н. и 18 з.п. ф-лы, 6 ил.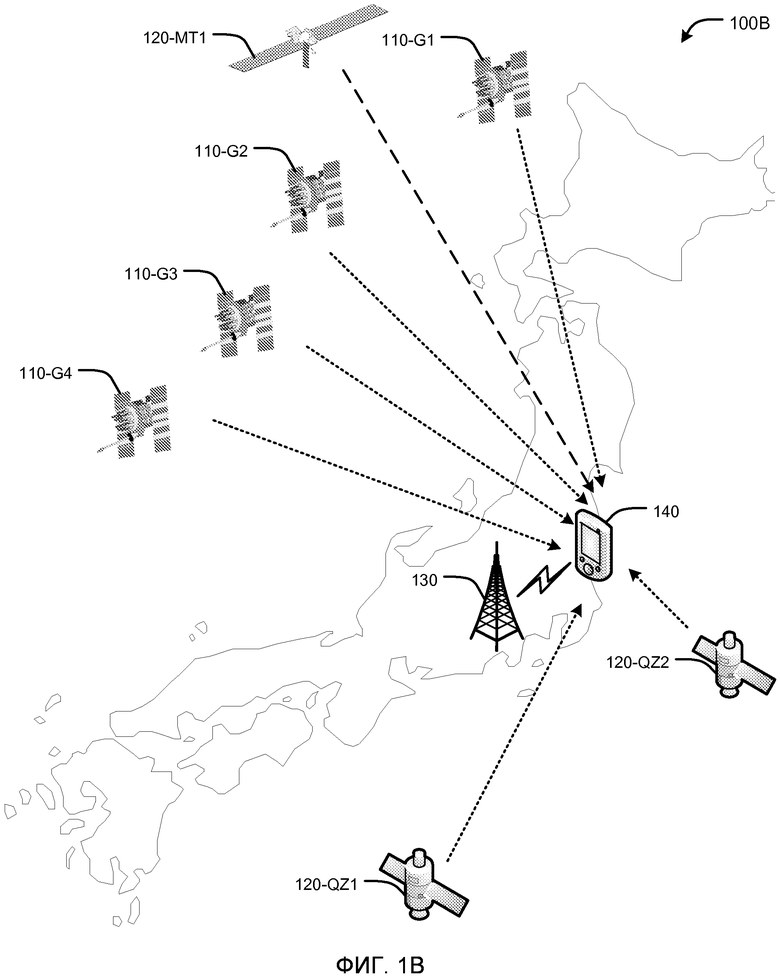
1. Способ определения местоположения беспроводного устройства, содержащий этапы, на которых:
- принимают первый сигнал посредством беспроводного устройства;
- получают идентификатор, указывающий первое местоположение, из первого сигнала, причем упомянутый идентификатор содержит код страны, соответствующий упомянутому первому местоположению;
- извлекают информацию, ассоциированную по меньшей мере с одним искусственным спутником с помощью упомянутого кода страны, причем по меньшей мере один искусственный спутник принадлежит региональной спутниковой системе, орбитальный тип которой является геосинхронным, причем упомянутая информация содержит диапазон поиска в допплеровском режиме, соответствующий упомянутому по меньшей мере одному искусственному спутнику;
- принимают второй сигнал посредством беспроводного устройства;
- обрабатывают второй сигнал, чтобы получить информацию первого спутникового сигнала для по меньшей мере одного искусственного спутника, причем обработка второго сигнала содержит этап, на котором ограничивают поиск первого спутникового сигнала на основании упомянутого диапазона поиска в допплеровском режиме; и
- определяют местоположение беспроводного устройства по меньшей мере частично на основе информации первого спутникового сигнала.
2. Способ по п.1, в котором обработка второго сигнала, чтобы получить информацию первого спутникового сигнала, содержит этап, на котором обрабатывают второй сигнал с помощью ограниченного диапазона поиска в допплеровском режиме перед выполнением доступа к текущей спутниковой орбитальной информации.
3. Способ по п.1, в котором прием первого сигнала дополнительно содержит этап, на котором принимают сигнал от сотовой базовой станции; при этом упомянутый идентификатор содержит мировой временной пояс первого местоположения или по меньшей мере часть сетевого адреса беспроводного устройства.
4. Способ по п.1, дополнительно содержащий этап, на котором обновляют информацию, ассоциированную по меньшей мере с одним искусственным спутником.
5. Способ по п.1, в котором извлечение информации, ассоциированной по меньшей мере с одним искусственным спутником, дополнительно содержит этап, на котором осуществляют доступ к данным в энергонезависимом запоминающем устройстве беспроводного устройства.
6. Способ по п.1, в котором информация, ассоциированная по меньшей мере с одним искусственным спутником, содержит псевдослучайный числовой код (PRN), используемый для кодирования первого спутникового сигнала, и в котором обработка второго сигнала содержит этапы, на которых:
- формируют опорный сигнал с помощью псевдослучайного числового кода и
- взаимно сопоставляют второй сигнал и опорный сигнал.
7. Способ по п.1, в котором региональная спутниковая система выбрана из группы, состоящей из глобальной системы уточнения и коррекции (WAAS), Европейской геостационарной службы навигационного покрытия (EGNOS), MTSAT-спутниковой системы уточнения (MSAS), спутниковой системы Quasi-Zenith (QZSS), автоматической системы уточнения GPS (GAGAN) и Индийской региональной навигационной спутниковой системы (IRNSS).
8. Способ по п.1, дополнительно содержащий этапы, на которых
во время получения информации первого спутникового сигнала обрабатывают второй сигнал, чтобы получить информацию второго спутникового сигнала для второго искусственного спутника, при этом второй искусственный спутник является частью глобальной навигационной спутниковой системы (GNSS).
9. Способ по п.1, в котором первое местоположение является страной в зоне покрытия спутниковой системы Quasi-Zenith (QZSS), причем способ дополнительно содержит этапы, на которых:
- извлекают диапазон поиска в допплеровском режиме, соответствующий по меньшей мере одному искусственному спутнику для страны, указанной идентификатором; и
- ограничивают поиск первого спутникового сигнала на основе диапазона поиска в допплеровском режиме.
10. Беспроводное устройство для определения местоположения, содержащее:
- первый приемник, выполненный с возможностью принимать несущий информацию сигнал, имеющий первый идентификатор, указывающий первое местоположение;
- второй приемник, выполненный с возможностью принимать множество спутниковых сигналов и определять местоположение беспроводного устройства с помощью информации из множества спутниковых сигналов, при этом второй приемник принимает упомянутый по меньшей мере один из множества спутниковых сигналов с помощью вторых идентификаторов для искусственных спутников, которые являются частью региональной спутниковой системы, орбитальный тип которой является геосинхронным, причем упомянутый первый идентификатор используют для извлечения диапазона поиска в допплеровском режиме, соответствующего упомянутому первому местоположению, и упомянутый второй приемник ограничивает поиск несущей упомянутого по меньшей мере одного из множества спутниковых сигналов на основании упомянутого диапазона поиска в допплеровском режиме; и
- процессор, выполненный с возможностью получать первый идентификатор из несущего информацию сигнала, причем упомянутый первый идентификатор содержит код страны, соответствующий упомянутому первому местоположению, и использовать упомянутый код страны, чтобы извлечь вторые идентификаторы из памяти беспроводного устройства, причем вторые идентификаторы содержат диапазон поиска в допплеровском режиме.
11. Беспроводное устройство по п.10, в котором вторые идентификаторы ассоциированы с искусственными спутниками, которые являются частью по меньшей мере одной региональной спутниковой системы, имеющими первое местоположение в ее зоне покрытия, и в котором первый приемник принимает несущий информацию сигнал от сотовой базовой станции.
12. Беспроводное устройство по п.10, в котором первый идентификатор содержит мировой временной пояс первого местоположения.
13. Беспроводное устройство по п.10, в котором первый идентификатор содержит часть сетевого адреса беспроводного устройства, а процессор выполнен с возможностью извлекать вторые идентификаторы из памяти на основе части сетевого адреса.
14. Беспроводное устройство по п.10, в котором память содержит энергонезависимую память, и вторые идентификаторы хранятся в энергонезависимой памяти.
15. Беспроводное устройство по п.10, в котором процессор выполнен с возможностью обновлять первые и вторые идентификаторы в памяти.
16. Беспроводное устройство по п.10, в котором вторые идентификаторы содержат по меньшей мере один псевдослучайный числовой (PRN) код для искусственных спутников, которые являются частью региональной спутниковой системы.
17. Беспроводное устройство по п.16, в котором второй приемник выполнен с возможностью формировать опорный сигнал с помощью одного из по меньшей мере одного псевдослучайного числа и взаимно сопоставлять по меньшей мере один из множества спутниковых сигналов с опорным сигналом.
18. Беспроводное устройство п.10, в котором региональная спутниковая система выбрана из группы, состоящей из глобальной системы уточнения и коррекции (WAAS), Европейской геостационарной службы навигационного покрытия (EGNOS), MTSAT-спутниковой системы уточнения (MSAS), спутниковой системы Quasi-Zenith (QZSS), автоматической системы уточнения GPS (GAGAN) и Индийской региональной навигационной спутниковой системы (IRNSS).
19. Беспроводное устройство по п.10, в котором второй приемник принимает сигналы от глобальной навигационной спутниковой системы (GNSS) с помощью третьих идентификаторов и одновременно принимает по меньшей мере один из множества спутниковых сигналов с помощью вторых идентификаторов.
20. Беспроводное устройство по п.10, в котором первый идентификатор указывает страну, а региональной спутниковой системой является спутниковая система Quasi-Zenith (QZSS), причем процессор выполнен с возможностью извлекать диапазон поиска в допплеровском режиме, соответствующий искусственным спутникам QZSS и стране, указанной идентификатором, и в котором второй приемник ограничивает поиск несущей частоты по меньшей мере одного из множества спутниковых сигналов на основе диапазона поиска в допплеровском режиме.
21. Машиночитаемый носитель, закодированный одной или более инструкцией для определения местоположения беспроводного устройства, причем одна или более инструкций включают в себя инструкции, которые при исполнении одним или более процессорами побуждают один или более процессоров выполнять этапы:
- приема первого сигнала посредством беспроводного устройства;
- получения идентификатора, указывающего первое местоположение, из первого сигнала, причем упомянутый идентификатор содержит код страны, соответствующий упомянутому первому местоположению;
- извлечения информации, ассоциированной по меньшей мере с одним искусственным спутником с помощью упомянутого кода страны, причем по меньшей мере один искусственный спутник принадлежит региональной спутниковой системе, орбитальный тип которой является геосинхронным, причем упомянутая информация содержит диапазон поиска в допплеровском режиме, соответствующий упомянутому по меньшей мере одному искусственному спутнику;
- приема второго сигнала посредством беспроводного устройства;
- обработки второго сигнала, чтобы получить информацию первого спутникового сигнала по меньшей мере для одного искусственного спутника, причем обработка второго сигнала содержит этап, на котором ограничивают поиск первого спутникового сигнала на основании упомянутого диапазона поиска в допплеровском режиме; и
- определения местоположения беспроводного устройства по меньшей мере частично на основе информации первого спутникового сигнала.
22. Беспроводное устройство для определения местоположения, содержащее:
- средство приема несущего информацию сигнала, имеющего первый идентификатор, указывающий первое местоположение;
- средство приема множества спутниковых сигналов и определения местоположения беспроводного устройства с помощью информации из спутниковых сигналов, при этом по меньшей мере один из множества спутниковых сигналов принимают с помощью вторых идентификаторов для искусственных спутников, которые являются частью региональной спутниковой системы, орбитальный тип которой является геосинхронным, причем упомянутый первый идентификатор используют для извлечения диапазона поиска в допплеровском режиме, соответствующего упомянутому первому местоположению, и упомянутое средство приема ограничивает поиск несущей упомянутого по меньшей мере одного из множества спутниковых сигналов на основании упомянутого диапазона поиска в допплеровком режиме; и
- средство получения первого идентификатора из несущего информацию сигнала, причем упомянутый первый идентификатор содержит код страны, соответствующий упомянутому первому местоположению, и использования упомянутого кода страны, чтобы извлечь вторые идентификаторы из запоминающего средства беспроводного устройства, причем вторые идентификаторы содержат диапазон поиска в допплеровском режиме.
| JP 2005283187 А, 13.10.2005 | |||
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| US 6801854 B1, 05.10.2004 | |||
| US 7031730 B1, 18.04.2006 | |||
| US 6040798 A, 21.03.2000 | |||
| US 6208290 B1, 27.03.2001 | |||
| WO 9622546 A1, 25.07.1996. | |||

