УРОВЕНЬ ТЕХНИКИ
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к спутниковой системе позиционирования (SPS), а конкретнее к содействию мобильной станции в определении ее положения и времени с использованием информации об орбите SPS.
УРОВЕНЬ ТЕХНИКИ
Приемник спутниковой системы позиционирования (SPS) обычно определяет свое положение посредством вычисления времен поступления сигналов от множества спутников. Эти спутники передают, как часть своих сообщений, и спутниковые данные позиционирования, и спутниковые данные синхронизации времени. Положения спутников, скорость и синхронизация времени обычно представляются посредством данных альманаха и эфемерид. Данные эфемерид относятся к содержимому субкадров 1, 2 и 3 в сообщениях, переданных от спутника. Эфемериды предоставляют очень точную оценку орбиты (ошибка приблизительно в 1 метр) (положения спутников, время и смещение времени). Однако типичный процесс поиска и получения спутниковых сигналов, считывания данных эфемерид, переданных спутниками, и вычисление местоположения приемника из этих данных отнимает много времени и требует умеренно сильных уровней сигнала.
Например, устройства глобальной системы позиционирования (GPS) определяют положение на основе измерения времен поступления в приемник GPS сигналов GPS, транслируемых от орбитальных спутников. Как упомянуто, одним недостатком такой системы является относительно большое время, необходимое для выполнения автономного получения сигнала. Спутниковые сигналы не могут отслеживаться до тех пор, пока они не были сначала обнаружены посредством поиска в двумерном "пространстве" поиска, измерениями которого являются задержка сдвига кода и наблюдаемый доплеровский сдвиг по частоте. Процесс поиска, получения и демодуляции спутниковых сигналов в приемнике SPS иногда называется "автономным" режимом работы, который может отличаться от режима работы "с содействием".
Чтобы уменьшить задержку, связанную с автономным режимом работы, может предоставляться информация для помощи приемнику SPS или GPS в получении конкретного сигнала. Такая вспомогательная информация позволяет приемнику сузить пространство поиска, в котором должен быть осуществлен поиск, чтобы обнаружить сигнал, посредством предоставления границ неопределенности кода и частоты. Система, которая применяет приемник GPS, уточняемый вспомогательными данными GPS, обычно называется "глобальной системой позиционирования с содействием" (AGPS).
Один пример системы AGPS включает в себя беспроводную мобильную станцию (MS) (например, сотовый телефон), имеющую в себе или осуществляющую связь с приемником GPS, причем MS осуществляет связь с одной или более базовыми станциями (BS) сети беспроводной связи, также называемыми базовыми приемопередающими подстанциями (BTS) или Узлами B, которые, в свою очередь, осуществляют связь с одним или более серверами содействия определению местоположения, иногда называемыми Объектами определения положения (PDE) или Обслуживающими мобильными центрами определения местоположения (SMLC), в зависимости от протокола связи по радиоинтерфейсу. Другой пример системы AGPS включает в себя MS или переносной компьютер, имеющий в себе или осуществляющий связь с приемником GPS, причем MS или переносной компьютер имеет возможность осуществления связи с сетью связи, например, но не ограничиваясь этим, с Интернетом, посредством которой устройство осуществляет связь с сервером содействия определению местоположения.
Сервер содействия определению местоположения получает вспомогательную информацию GPS от одного или более опорных приемников GPS (крупнорегиональная или глобальная опорная сеть). Сервер содействия определению местоположения также имеет доступ к средству определения приблизительного положения мобильной станции. Сервер содействия определению местоположения поддерживает базу данных GPS, которая может включать в себя эталонное время, информацию об альманахе и эфемеридах орбиты спутника, информацию об ионосфере и информацию о рабочем состоянии спутника ("работоспособность"). Сервер содействия определению местоположения также вычисляет вспомогательную информацию, настроенную для приблизительного положения мобильной станции.
Положение MS в системе AGPS может определяться на MS (иногда это называется режимом позиционирования на основе MS) при содействии сервера содействия определению местоположения. Во время режима позиционирования на основе MS, когда механизм GPS требует обновленных вспомогательных данных, например данных эфемерид, данных альманаха касательно местоположения спутников или базовых станций, информации о синхронизации для базовых станций и/или спутников или исходного положения (например, но не ограничиваясь этим, определенного посредством Улучшенной трилатерации прямой линии связи (AFLT)) и так далее, следующая фиксация положения приведет к тому, что мобильная станция будет контактировать с сетью связи ради данных, посредством этого нагружая сеть и используя энергетические ресурсы MS. Положение MS в системе AGPS в качестве альтернативы может определяться на сервере содействия определению местоположения и передаваться обратно к MS, используя информацию, полученную MS (иногда это называют режимом позиционирования при содействии MS). Орбиты спутников SPS могут моделироваться в виде модифицированных эллиптических орбит с корректирующими коэффициентами для учета различных возмущений. Относительно краткосрочные данные эфемерид предоставляют очень точное представление об орбите спутника. Например, разряд 17 в слове 10 в субкадре 2 GPS является флагом "интервала соответствия", который указывает интервал соответствия кривой, используемый сегментом управления GPS при определении параметров эфемериды, при этом "0" указывает 4-часовое соответствие, а "1" указывает соответствие "более 4 часов". Кроме того, режим расширенной навигации у спутников Block II/IIA GPS гарантирует передачу правильных параметров эфемерид в течение 14 дней для поддержки краткосрочной расширенной работы. Во время обычной работы сегмент управления предоставляет ежедневные выгрузки навигационных (орбитальных) данных на каждый спутник для поддержки точности позиционирования с вероятностью сферической ошибки (SEP) в 16 метров.
Положение MS в системе AGPS также может определяться на MS с использованием данных эфемерид, принятых непосредственно от спутников. Данные эфемерид в течение их периода достоверности (например, 4-часовой эпохи) являются более точными, чем данные альманаха и предсказанные данные об орбите. Предсказанные данные об орбите являются оценкой положения спутников, скорости и синхронизации на основе решения орбиты, предсказанного системой, отличной от спутниковой системы позиционирования реального времени (например, Сегмента управления GPS). Однако транслируемые данные эфемерид могут быть не всегда доступны мобильной станции из-за отсутствия линии прямой видимости, затенения, плохих условий сигнала или других проблем приема, которые препятствуют демодуляции спутниковых трансляций посредством MS, и при их доступности все же требуют времени на демодуляцию.
Необходима система и способ, чтобы дать возможность приемнику SPS использовать доступные данные об орбите для выработки точных положений и синхронизации, даже когда недоступна текущая информация реального времени об орбите и смещения времени (либо из транслируемых данных, либо из данных сервера содействия определению местоположения).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описывается способ и система для мобильной станции, чтобы определять ее положение (или скорость) и время, используя гибридное объединение данных об орбите спутника. В одном аспекте мобильная станция объединяет предсказанные данные об орбите от одного спутника и данные об орбите в реальном времени от другого спутника при определении фиксации. Мобильная станция может динамически изменять объединение, когда изменяется доступность данных об орбите в реальном времени. Объединение может быть сделано для спутников в одной системе спутников или в разных системах спутников. Мобильная станция может использовать данные об орбите спутника в реальном времени в одном периоде времени и предсказанные данные об орбите того же спутника в другом периоде времени. В другом аспекте мобильная станция может использовать данные об орбите в реальном времени для коррекции смещения времени в предсказанных данных об орбите. Коррекция в смещении времени может быть сделана для того же спутника, который предоставляет данные об орбите в реальном времени, или для другого спутника. Другой спутник может находиться в той же системе спутников или в другой системе спутников. В другом аспекте дополнительная неопределенность, представленная предсказанными данными об орбите, и возраст данных об орбите могут учитываться во взвешенном методе наименьших квадратов или в другом вычислении.
Способ и система, описанные в этом документе, предоставляют гибкость и повышают точность в определении мобильной фиксации. Данные об орбите спутника из разных источников могут динамически объединяться посредством мобильной станции. Данные об орбите в реальном времени могут использоваться для повышения точности в смещении времени в предсказанных данных об орбите и для обновления предсказанных данных с подгонкой к фактическим данным об орбите.
Другие признаки настоящего изобретения станут очевидными из прилагаемых чертежей и из подробного описания изобретения, которое следует ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение ради примера, а не ради ограничения иллюстрируется на фигурах прилагаемых чертежей, на которых одинаковые ссылки указывают аналогичные элементы. Следует отметить, что ссылки на "некоторый" или на "один" вариант осуществления в этом раскрытии изобретения не обязательно относятся к одному и тому же варианту осуществления, и такие ссылки означают по меньшей мере один.
Фиг.1 - схема, показывающая пример системы связи, включающей в себя сервер для содействия мобильной станции в обнаружении спутника.
Фиг.2А - схема, показывающая мобильную станцию (MS) из Фиг.1, принимающую данные об орбите от множества спутников.
Фиг.2В - блок-схема алгоритма, которая иллюстрирует пример процесса в MS для объединения данных об орбите в реальном времени и предсказанных данных об орбите от разных спутников.
Фиг.3А - схема, показывающая предсказанные данные об орбите на временной последовательности, в которой данные об орбите в реальном времени доступны в некоторые периоды времени.
Фиг.3В - блок-схема алгоритма, которая иллюстрирует процесс в MS для использования данных в реальном времени об орбите спутника в первом периоде времени и предсказанных данных об орбите того же спутника во втором периоде времени.
Фиг.4 - диаграмма, показывающая пример радиальных ошибок орбиты и ошибок смещения времени в предсказанных данных об орбите, как функцию времени.
Фиг.5 - блок-схема алгоритма, показывающая процесс в MS для коррекции предсказанных данных об орбите с использованием данных об орбите в реальном времени.
Фиг.6 - блок-схема, показывающая пример компонентов в мобильной станции из Фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ
Описывается способ и система для содействия мобильной станции в определении своего положения (или скорости) и времени (называемых "фиксацией"). Способ и система также повышают точность смещения времени спутника. Смещение времени спутника, которое описано в этом документе, относится к разности оценки времени часов спутника и контрольных часов, например контрольных часов глобальной системы позиционирования (GPS). Из положений и смещения времени множества спутников мобильная станция может определить свое положение и время. В одном аспекте изобретения положение и смещение времени каждого спутника могут предоставляться мобильной станции из ряда источников с разными степенями точности. Как правило, данные об орбите в реальном времени (например, эфемериды) обладают наивысшей точностью, но не всегда могут быть доступны. В этом документе вводится "гибридная" методика, чтобы дать возможность мобильной станции объединить данные об орбите в реальном времени с другой информацией об орбите спутника, например предсказанными данными об орбите, при вычислении фиксации положения/скорости/времени. Объединение данных об орбите спутника может вовлекать в себя множество спутников и/или множество систем спутников. Описанная в этом документе гибридная методика также дает возможность мобильной станции использовать данные об орбите спутника в реальном времени, чтобы повысить точность смещения времени спутника в предсказанных данных об орбите. Улучшенные данные предсказания могут быть сделаны для одного и того же спутника или для другого спутника в той же или в другой системе спутников.
При использовании в данном документе мобильная станция (MS) относится к устройству, например сотовому или другому устройству беспроводной связи, устройству персональной системы связи (PCS), персональному навигационному устройству, переносному компьютеру или другому подходящему мобильному устройству, допускающему прием и обработку сигналов SPS. Термин "мобильная станция" также предназначен, чтобы включать в себя устройства, которые осуществляют связь с персональным навигационным устройством (PND), например, посредством беспроводного, инфракрасного, проводного соединения малой дальности или другого соединения независимо от того, происходит прием сигнала спутника, прием вспомогательных данных и/или связанная с положением обработка на устройстве или на PND. Также "мобильная станция" предназначена, чтобы включать в себя все устройства, включая устройства беспроводной связи, компьютеры, переносные компьютеры и т.д., которые имеют возможность осуществления связи с сервером, например, через Интернет, WiFi или другую сеть, и независимо от того, происходит ли прием сигнала спутника, прием вспомогательных данных и/или связанная с положением обработка на устройстве, на сервере или на другом устройстве, связанном с сетью. Любое рабочее объединение вышеупомянутого также считается "мобильной станцией".
Термин "грубые данные об орбите" в этом документе относится к грубой и менее точной оценке положения спутника и данных о времени, переданных от спутника, например альманаха. Термин "данные об орбите в реальном времени" относится к точному представлению положений спутников, скорости и синхронизации, переданных от спутника, например, эфемерид, включающих в себя субкадры 1, 2 и 3. Мобильная станция в заранее определенный интервал времени может получить блок данных об орбите в реальном времени, который действителен в течение некоторого периода времени. Таким образом, "действительные данные об орбите в реальном времени" относятся к данным об орбите в реальном времени, которые недавно получены и находятся в пределах срока действия. "Недействительные данные об орбите в реальном времени" относятся к данным об орбите в реальном времени, которые слишком старые и уже не действительны. Тем не менее, пока специально не указано иное, термин "данные об орбите в реальном времени" в нижеследующем описании относится к "действительным данным об орбите в реальном времени". Термин "предсказанные данные об орбите" относится к точной оценке положения спутника, скорости и синхронизации, которая обладает относительно расширенным сроком действия по сравнению с точными орбитальными данными в реальном времени. Предсказанные данные об орбите доступны на сервере содействия определению местоположения и могут передаваться или сохраняться в местоположении, доступном мобильной станции.
Чтобы повысить эффективность передачи данных, сервер содействия определению местоположения может передавать мобильной станции корректирующие данные, и мобильная станция может восстановить предсказанные данные об орбите или их приближенное значение путем объединения корректирующих данных с грубыми данными об орбите. В нижеследующем описании подразумевается, что "предсказанные данные об орбите", используемые мобильной станцией, включают в себя предсказанные данные об орбите или приближенное значение предсказанных данных об орбите, которое восстановлено мобильной станцией из грубых данных об орбите.
Фиг.1 - блок-схема системы 100 связи в соответствии с аспектом настоящего изобретения. Система 100 включает в себя сервер 130 содействия определению местоположения, соединенный с возможностью связи с одной или более MS 120. Сервер 130 содействия определению местоположения принимает грубые данные об орбите, а также предсказанные данные об орбите и/или файлы предсказанных орбитальных параметров, вмещающие в себя предсказанные данные об орбите. В одном сценарии сервер 130 содействия определению местоположения принимает предсказанные данные об орбите через сеть 162 от поставщика 110 предсказанных данных об орбите. Сеть 162 может содержать, но не ограничивается этим, сеть, которая поддерживает соединения по Интернет-протоколу (IP) (например, Интернет). Сервер 130 содействия определению местоположения при желании может включать в себя интерфейс, например программу защищенной передачи файлов (SFTP), для безопасной передачи предсказанных данных об орбите от поставщика 110 предсказанных данных об орбите.
В одном аспекте поставщик 110 предсказанных данных об орбите периодически генерирует предсказанные данные об орбите (например, каждые несколько часов), чтобы создать орбитальные данные, которые действительны в течение расширенной продолжительности времени (например, 6 часов или больше). Сервер 130 содействия определению местоположения периодически проверяет наличие новых данных от поставщика предсказанных данных об орбите. Предсказанные данные об орбите также могут включать в себя трехмерные значения неопределенности для предсказанных координат спутника, неопределенность в коррекциях предсказанного времени спутника, а также указание предсказанных перерывов. На основе неопределенности и информации о перерывах посредством сервера 130 содействия определению местоположения может быть вычислена пользовательская ошибка по дальности (URE) и предоставлена MS 120.
Сервер 130 содействия определению местоположения принимает грубые данные об орбите от поставщика 150 данных об орбите в реальном времени через сеть 164. Поставщик 150 данных об орбите в реальном времени может быть шлюзом Глобальной опорной сети (GRN) или шлюзом Крупнорегиональной опорной сети (WARN), который принимает информацию о спутнике в реальном времени, включающую в себя, но не ограничиваясь этим, пакетные эталонные данные SPS, навигационные сообщения, информацию о работоспособности, альманах и эфемериды. В одном сценарии сеть 164 является сетью, которая поддерживает IP-соединения, и сервер 130 содействия определению местоположения может принимать информацию о спутнике в реальном времени от поставщика 150 данных об орбите в реальном времени в многоадресных сообщениях IP.
Сервер 130 содействия определению местоположения генерирует корректирующие данные 140 из предсказанных данных об орбите и грубых данных об орбите реального времени. Корректирующие данные 140 могут передаваться непосредственно к MS 120 через сеть 168 или в местоположение хранения, доступное для MS. Например, корректирующие данные 140 могут сохраняться в запоминающем устройстве, локально или удаленно соединенном с сервером 130 содействия определению местоположения. MS 120 может принимать корректирующие данные 140 от хоста 160 данных через сеть 166, используя протокол передачи файлов, такой как FTP, HTTP или другие подходящие сетевые протоколы. MS 120 может принимать эти корректирующие данные (вместе с грубыми данными или без них) способом точка-точка через сеть 168, непосредственно от сервера 130 содействия определению местоположения.
С целью упрощения обсуждения в этом документе термин "корректирующие данные" 140 относится к орбитальным коррекциям спутника, которые могут передаваться по схеме точка-точка, передаваться в файлах, транслироваться или отправляться из одного места в другое посредством любого средства передачи данных. Сообщения, сгенерированные сервером 130 содействия определению местоположения, имеют эффективный формат обмена сообщениями, который позволяет MS 120 определять положения спутников, скорость и синхронизацию посредством небольшого количества разрядов за расширенный период времени. Сообщения предоставляют MS 120 информацию для коррекции грубых данных об орбите, чтобы скорректированное положение спутника было точным в пределах нескольких метров.
Сервер 130 содействия определению местоположения также может предоставлять в MS 120 грубые параметры орбиты, оцененную точность (Пользовательская ошибка по дальности (URE)), модель коррекции ионосферы, модель всемирного скоординированного времени (UTC) и информацию о работоспособности/применимости спутника. Это нужно для обеспечения целостности данных спутника и разрешения мобильной операции без необходимости принимать и декодировать данные, переданные спутниками в эфире. Это также обеспечивает, что MS 120 использует грубые данные об орбите, которые идентичны используемым сервером 130 содействия определению местоположения.
Следует отметить, что описанная выше система показана только с целями иллюстрации, и могут существовать другие конфигурации. Например, сети 162, 164, 166 и 168 в качестве альтернативы могут быть соединениями точка-точка, локальными сетями, глобальными сетями, транслирующими сетями, любыми подходящими проводными или беспроводными сетями, компьютерами или компьютерными сетями или их объединениями, которые поддерживают передачу данных или пересылки файлов.
Специалист в данной области техники увидит, что грубые данные об орбите, которые предоставляют грубую оценку положений спутников, включают в себя широкий диапазон видов. В нижеследующем описании, последняя копия транслированного альманаха GPS предлагается для использования в качестве грубой оценки положений спутников и синхронизации для облегчения понимания идеи изобретения. Однако все в нижеследующем является характерным для альтернативных грубых данных об орбите: более ранняя копия транслированных эфемерид GPS; последние копии транслированных альманаха или эфемерид Galileo или ГЛОНАСС; нетранслированная грубая модель положений спутников, которая придерживается того же вида, что и альманах или эфемериды GPS, Galileo или ГЛОНАСС; любое подмножество или расширение Кеплеровых параметров, используемых в форматах альманаха и эфемерид в GPS, Galileo и ГЛОНАСС; любые некеплеровы представления орбит спутников; и другие предсказанные данные об орбите, которые ухудшились со временем. Также станет понятно, что соответствующая информация, относящаяся к другим спутниковым навигационным системам, также может применяться в объеме раскрытой методологии. Настоящее изобретение включает в себя все без исключения способы описания грубой орбиты. Специалист в данной области техники должен принять во внимание, что методология применяет независимо от того, какую форму принимает грубая оценка.
В некоторых сценариях грубые данные об орбите могут поставляться в MS 120 сервером 130 содействия определению местоположения. В дополнение к передаче грубой оценки положений спутников к MS 120 сервер 130 содействия определению местоположения обладает возможностью включения эталонного времени во вспомогательное сообщение для мобильной станции. В этом аспекте изобретения сервер 130 содействия определению местоположения получает эталонное время от сетевого сервера времени или из данных GPS, принятых от опорных приемников (например, крупнорегиональной опорной сети или Глобальной опорной сети). Эта информация об эталонном времени может добавляться в сообщение, которое передается к MS 120, которое вмещает в себя грубую оценку положений спутников. Сервер 130 содействия определению местоположения также может реализовывать алгоритмы, которые могут повысить точность синхронизации эталонного времени, предоставленного сетевым сервером времени, и передавать это более точное время к MS 120.
Нужно отметить, что MS 120 может напрямую получать эталонное время независимо от сервера 130 содействия определению местоположения, от сети с коммутацией пакетов данных, которая может быть синхронизирована или не синхронизирована со временем GPS (например, с сетевым сервером времени или сетью связи CDMA). Таким образом, MS 120 получает оценку глобального эталонного времени, например времени GPS, всемирного скоординированного времени (UTC), времени WWO и т.д.
Фиг.2А показывает пример среды, в которой может работать MS 120 для определения пространственной и временной информации. MS 120 использует объединение данных об орбите для определения положения (или скорости) в трех пространственных измерениях и в измерении времени. MS 120 использует декодированные данные об орбите в реальном времени от спутников всякий раз, когда доступны данные об орбите в реальном времени. Данные в реальном времени могут быть декодированы из транслируемых сообщений спутника, но также могут поступать от опорной сети спутников через сервер содействия определению местоположения, когда сетевое соединение доступно или было доступно в последнее время. Данные об орбите в реальном времени обычно точнее, чем более ранние предсказанные данные об орбите, которые могут постепенно ухудшаться в течение некоторого периода времени. Также данные об орбите в реальном времени могут вмещать в себя новую информацию о спутниках, не известную во время предсказаний (например, информацию о работоспособности и целостности спутника).
Для простоты в нижеследующем описании термин "недоступные/недоступность данных об орбите в реальном времени" в этом документе относится к ситуации, где данные об орбите в реальном времени не могут быть приняты MS 120, к другой ситуации, где ранее принятые MS 120 данные об орбите в реальном времени становятся недействительными (например, дальше +/-2 часов от TOE), или к объединению обеих ситуаций, пока специально не указано иное. Термин "доступные/доступность" относится к ситуации, где данные об орбите в реальном времени, принятые и сохраненные MS 120, находятся в пределах их срока действия.
Хотя обычно желательнее использовать данные об орбите в реальном времени при вычислении местоположения, MS 120 иногда не имеет доступа к действительным данным об орбите спутника в реальном времени. Эта ситуация может возникать, когда недоступны свежие данные об орбите в реальном времени для спутника и когда стали недействительными данные об орбите в реальном времени (для спутника), ранее принятые MS 120. Свежие данные об орбите в реальном времени для спутника могут быть недоступны из-за отсутствия линии прямой видимости, затенения или других проблем приема, которые мешают MS 120 принимать спутниковые трансляции от спутника, и когда соединение с сервером 130 содействия определению местоположения недоступно или нежелательно (например, в связи со стоимостью передачи данных). Данные об орбите в реальном времени, ранее принятые MS 120, могут стать недействительными, когда данные, полученные MS 120 в более раннем периоде времени, становятся очень старыми для использования (например, дальше +/-2 часов от времени применимости). Когда MS 120 не имеет доступа к действительным данным об орбите в реальном времени от достаточного количества спутников, чтобы вычислить свое местоположение, MS 120 может использовать объединение данных об орбите, например данных об орбите в реальном времени, объединенных с предсказанными данными об орбите, чтобы определить пространственную и временную информацию.
Обратимся к примеру из Фиг.2А, на которой MS 120 предсказала данные об орбите для множества спутников, например спутников 21, 22, 23, 24 и 25, и дополнительно принимает данные в реальном времени (указанные сплошными линиями) об орбите некоторых спутников, например 21 и 22. Данные в реальном времени об орбите спутников 23, 24 и 25 являются недоступными (указаны пунктирными линиями) в момент, когда MS 120 определяет фиксацию. MS 120 может объединить данные в реальном времени об орбите спутников 21 и 22 с предсказанными данными об орбите любых двух из остальных спутников (то есть 23, 24 и 25) при определении трехмерного пространственного местоположения и времени. То есть, если количество спутников, предоставляющих данные об орбите в реальном времени, недостаточно для MS 120, чтобы определить фиксацию (например, два видимых спутника для четырех неизвестных в фиксации, как показано на Фиг.2А), то MS 120 может объединить данные об орбите в реальном времени, предоставленные этими спутниками, с предсказанными данными об орбите от других спутников, чтобы определить фиксацию.
В примере Фиг.2А MS 120 использует данные об орбите от четырех спутников, чтобы определить свое положение (или скорость) в трех пространственных измерениях и во времени. Однако, если MS 120 знает какой-либо из пространственных параметров или время, то уменьшается количество спутников, необходимое MS 120 для определения фиксации. Наглядно, если MS 120 знает свою высоту, то количество неизвестных в фиксации сокращается до трех. Аналогичным образом, при наличии такового, время может быть получено от сети связи или может поддерживаться высокоточным генератором. В результате можно уменьшить количество спутников, необходимое MS 120 для определения фиксации.
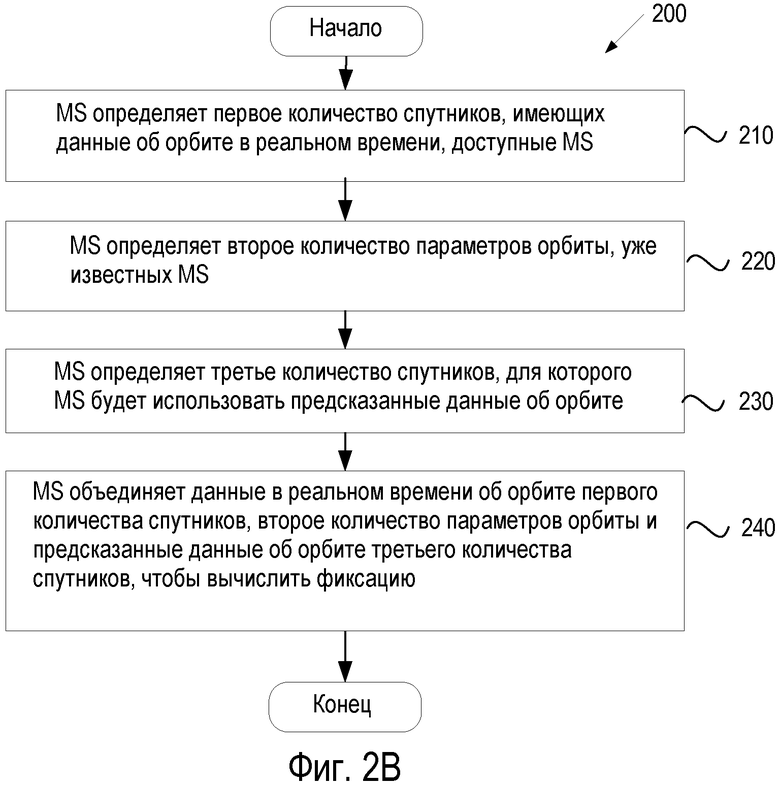
Фиг.2В - блок-схема алгоритма, которая иллюстрирует пример процесса 200 для выполнения описанных выше операций. На этапе 210 MS 120 определяет первое количество спутников, имеющих данные об орбите в реальном времени, доступные MS. Чтобы определить первое количество, MS 120 нужно контролировать достоверность данных об орбите в реальном времени, которые он принял раньше. MS 120 может использовать таймер для отслеживания текущего времени по отношению ко времени применимости данных об орбите в реальном времени. MS 120 также может сбросить таймер, когда принимается свежий набор данных об орбите в реальном времени для спутника, и закончить таймер после заранее определенного периода времени. На этапе 220 MS 120 определяет второе количество параметров орбиты (включающих в себя три пространственных измерения и время), которые ей известны или могут быть получены от другого средства. На этапе 230 MS 120 определяет третье количество спутников, для которого она будет использовать предсказанные данные об орбите. Третье количество может определяться, например, посредством вычитания суммы первого количества и второго количества из четырех. На этапе 240 MS 120 объединяет данные в реальном времени об орбите первого количества спутников, второе количество известных параметров орбиты и предсказанные данные об орбите третьего количества спутников, чтобы вычислить фиксацию.
Снова обратимся к Фиг.2А, в одном сценарии, MS 120 может использовать данные в реальном времени об орбите спутников 21 и 22 и предсказанные данные об орбите спутников 23, 24 и 25, чтобы определить четыре неизвестных в фиксации. Пять наборов данных об орбите от пяти спутников составляют переопределенную систему. MS 120 может подходящим образом назначить вес измерениям спутников от пяти спутников в решении для положения/скорости/времени и учесть ухудшенную точность предсказанных данных об орбите. Веса во взвешенном объединении могут определяться в соответствии с точностью каждого набора данных об орбите. Например, данные об орбите в реальном времени и предсказанные данные об орбите могут взвешиваться в соответствии с их оценками точности. Оценки точности могут включать в себя Пользовательскую ошибку по дальности (URE), Пользовательскую точность по дальности (URA), время до времени эфемерид (TOE), возраст предсказанных данных с последнего обновления, объединение части или всего вышеперечисленного или другие показатели.
Показатели оценки точности дополнительно объясняются ниже. URE обычно вычисляется или предоставляется сервером 130 содействия определению местоположения в качестве оценки неопределенности для предсказанных данных об орбите спутника. Когда MS 120 восстанавливает предсказанные данные об орбите из грубых данных об орбите (с коррекцией), то URE может использоваться в качестве оценки точности для предсказанных данных об орбите. Поскольку грубые данные об орбите одинаково используются сервером 130 содействия определению местоположения и MS 120, то ошибки, связанные с грубой орбитой, не вносят вклад в суммарную ошибку. URA является оценкой неопределенности данных об орбите спутника в реальном времени, которая предоставляется, например, сегментом управления GPS. URA обычно равна паре метров, а URE может быть десятками метров после пары дней предсказаний. Обе оценки ошибок могут использоваться как веса в взвешенном объединении предсказанных данных об орбите и данных об орбите в реальном времени. Дополнительно, время до TOE указывает возраст данных об орбите в реальном времени и также может использоваться в качестве оценки точности, а также весов во взвешенном объединении предсказанных данных об орбите и данных об орбите реального времени. Аналогичным образом, возраст предсказанных данных с последнего обновления указывает точность предсказанных данных об орбите и также может использоваться в качестве оценки точности, а также весов во взвешенном объединении предсказанных данных об орбите и данных об орбите реального времени. Измерения спутников с меньшими ошибками (например, данные об орбите в реальном времени) могут получать больший вес, чем измерения с большими ошибками (например, предсказанные данные об орбите или грубые данные об орбите). Более свежие измерения спутников могут получать больший вес, чем более старые измерения спутников.
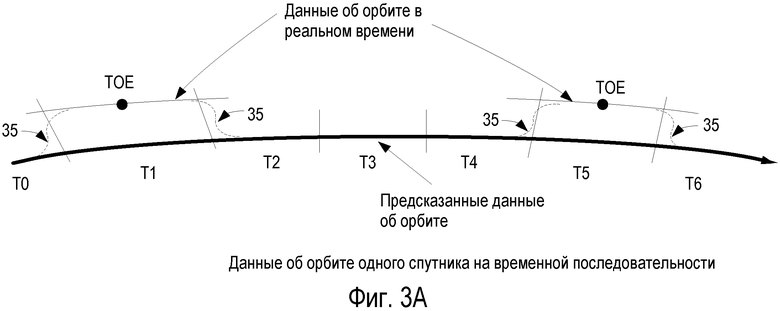
Фиг.3А - схема, которая иллюстрирует временную шкалу доступных данных об орбите для спутника. Обратимся к примеру из Фиг.3А, на которой MS 120 предсказала данные об орбите спутника для периодов времени T0-T6. Данные в реальном времени об орбите того же спутника доступны для MS 120 в периоды времени T1 и T5, которые центрированы в TOE. Данные об орбите в реальном времени отклоняются от фактических данных об орбите и становятся недействительными, когда время движется за границу T1 и T5. В этом примере MS 120 переключается с предсказанных данных об орбите на данные об орбите в реальном времени на границе T0 и T1, и переключается обратно на предсказанные данные об орбите на границе T1 и T2. Аналогичным образом MS 120 переключается с предсказанных данных об орбите на данные об орбите в реальном времени на границе T4 и T5, и переключается обратно на предсказанные данные об орбите на границе T4 и T5. В одном аспекте изобретения MS 120 интерполирует предсказанные данные об орбите и данные об орбите в реальном времени на границе T0 и T1, T1 и T2, T4 и T5, и T4 и T5, используя интерполирующие кривые 35, иллюстративно. Интерполирующие кривые 35 могут вычисляться с использованием любых известных методик интерполяции, которые сглаживают переходы между двумя наборами данных (например, данными об орбите в реальном времени и предсказанными данными об орбите одного спутника), чтобы избежать непредвиденного изменения в данных об орбите, которые используются MS 120 при определении фиксации.
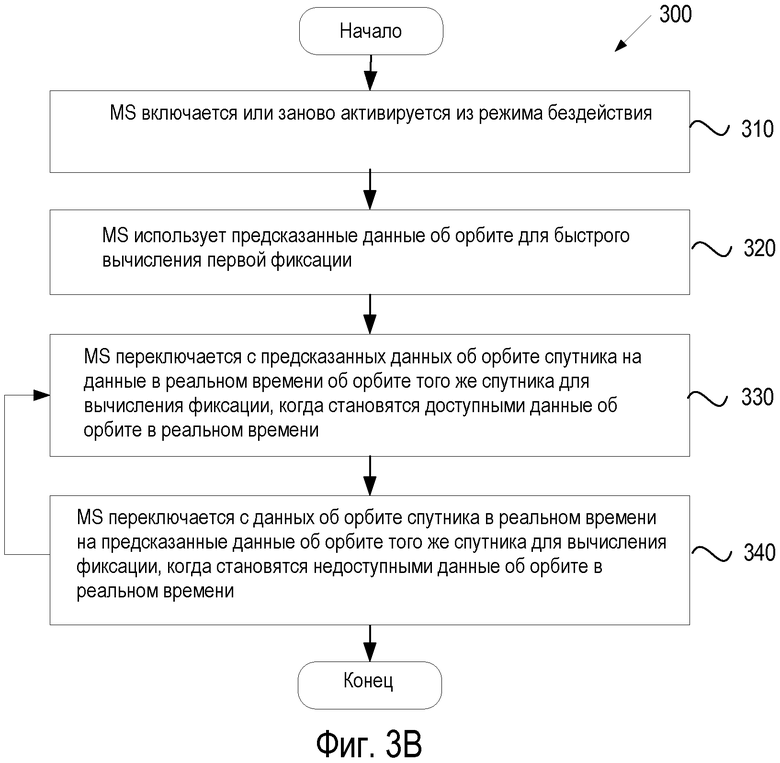
Фиг.3В - блок-схема алгоритма, которая иллюстрирует процесс 300, где MS 120 может объединять использование данных об орбите в реальном времени и предсказанных данных об орбите, как описано на Фиг.3А. В этом сценарии MS 120 использует данные об орбите спутника в реальном времени в первом периоде времени и предсказанные данные об орбите спутника во втором периоде времени. Как упоминалось выше, каждый из спутников 21-25 может иметь данные об орбите в реальном времени, доступные для MS 120 в течение действительного периода данных об орбите в реальном времени. Когда данные об орбите в реальном времени становятся недоступными, MS 120 может переключиться на предсказанные данные об орбите. Когда данные об орбите в реальном времени снова становятся доступными, MS 120 может переключиться обратно на данные об орбите в реальном времени. Таким образом, MS 120 может использовать данные об орбите спутника в реальном времени в течение одного периода времени и предсказанные данные об орбите того же спутника в течение другого периода времени, в зависимости от доступности или достоверности данных об орбите в реальном времени. Ссылаясь на пример из Фиг.3В, на этапе 310 MS 120 включается или заново активируется из режима бездействия. На этапе 320 перед тем, как MS 120 получает доступ к действительным данным об орбите в реальном времени, MS 120 может использовать предсказанные данные об орбите для быстрого вычисления первой фиксации, и может быть достигнута повышенная точность, как только демодулируются и декодируются данные об орбите в реальном времени. MS 120 также может оценить, доступны ли и достаточно свежи для использования сохраненные данные об орбите в реальном времени из предыдущей фиксации и/или загрузки, перед решением использовать предсказанные данные об орбите. В сценарии, где выполняется только одна фиксация, решение между точностью и скоростью может основываться на желаемом качестве обслуживания.
Переходя к этапу 330, когда становятся доступными данные об орбите в реальном времени от любого из спутников, которые MS 120 использует для вычисления фиксации, MS 120 может переключиться с предсказанных данных об орбите спутника на доступные данные об орбите в реальном времени. На этапе 340, когда становятся недоступными данные об орбите в реальном времени от любого из спутников, которые MS 120 использует для вычисления фиксации, MS 120 может переключиться с данных об орбите спутника в реальном времени на его предсказанные данные об орбите. Отметим, что в одном сценарии операция этапа 320 может выполняться параллельно операциям этапов 330 и 340. Операции этапов 330 и 340 могут повторяться, когда данные об орбите в реальном времени становятся доступными или недоступными. Таким образом, MS 120 может объединять данные об орбите в реальном времени от некоторых спутников с предсказанными данными об орбите некоторых других спутников, чтобы определить фиксацию. Объединение данных об орбите в реальном времени и предсказанных данных об орбите является динамическим. В любое время, когда данные об орбите спутника в реальном времени становятся доступными, MS 120 может динамически определить новое объединение данных об орбите в реальном времени и предсказанных данных об орбите для определения фиксации. Новое объединение включает в себя наибольшее количество спутников, имеющих данные об орбите в реальном времени, доступные в любой заданный момент, но не обязательно ждет данные об орбите реального времени перед выполнением первой фиксации.
Обратимся к Фиг.3А, MS 120 может интерполировать данные об орбите в реальном времени и предсказанные данные об орбите того же спутника с использованием взвешенного объединения данных об орбите в реальном времени и предсказанных данных об орбите, которые перекрываются во времени. Взвешенное объединение может применяться к положению, скорости, времени или любому их объединению. MS 120 может подходящим образом присваивать вес данным об орбите в решении для положения/скорости/времени. Например, данные об орбите в реальном времени и предсказанные данные об орбите могут взвешиваться в соответствии с их оценками точности. Оценки точности могут включать в себя Пользовательскую ошибку по дальности (URE), Пользовательскую точность по дальности (URA), время до времени эфемерид (TOE), возраст предсказанных данных с последнего обновления, объединение части или всего вышеперечисленного, или другие показатели.
Вышеприведенные показатели оценки точности объяснены в описании Фиг.2А. В сценарии с одним спутником на Фиг.3А те же показатели оценки точности также применяются к интерполяции данных об орбите в реальном времени и предсказанных данных об орбите, где интерполяция вычисляется в виде взвешенного объединения данных об орбите в реальном времени и предсказанных данных об орбите. Измерения спутников с меньшими ошибками (например, данные об орбите в реальном времени) могут получать больший вес, чем измерения с большими ошибками (например, предсказанные данные об орбите или грубые данные об орбите). Более свежие измерения спутников могут получать больший вес, чем более старые измерения спутников.
В одном сценарии взвешенное объединение (Orbitcombined) предсказанных данных об орбите (Opredicted) и данных об орбите в реальном времени (Oreal-time) может вычисляться как:
Orbitcombined=(W1 Oreal-time+W2 Opredicted)/(W1+W2), где W1 и W2 - функция (URE, URA), времени до TOE, возраста предсказанных данных с последнего обновления, объединения части или всего вышеперечисленного или других показателей.
В другом аспекте изобретения данные об орбите в реальном времени могут использоваться для повышения точности предсказанных данных об орбите. Эти "улучшенные" предсказанные данные об орбите могут использоваться в процессах 200 и 300. То есть они могут использоваться, когда недоступны данные об орбите в реальном времени от того же спутника, и/или могут использоваться для объединения с данными об орбите в реальном времени от других спутников при определении фиксации. Повышение точности может выполняться для всех предсказанных данных об орбите, включая положения спутников в трех пространственных измерениях и смещении времени спутника. В качестве альтернативы повышение точности может быть сделано только для смещения времени спутника, так как смещение времени обычно не такое предсказуемое, как траектория спутника, и более восприимчиво к ухудшению со временем. Повышение точности может быть сделано для одного и того же спутника, предоставляющего данные об орбите в реальном времени, или для другого спутника.
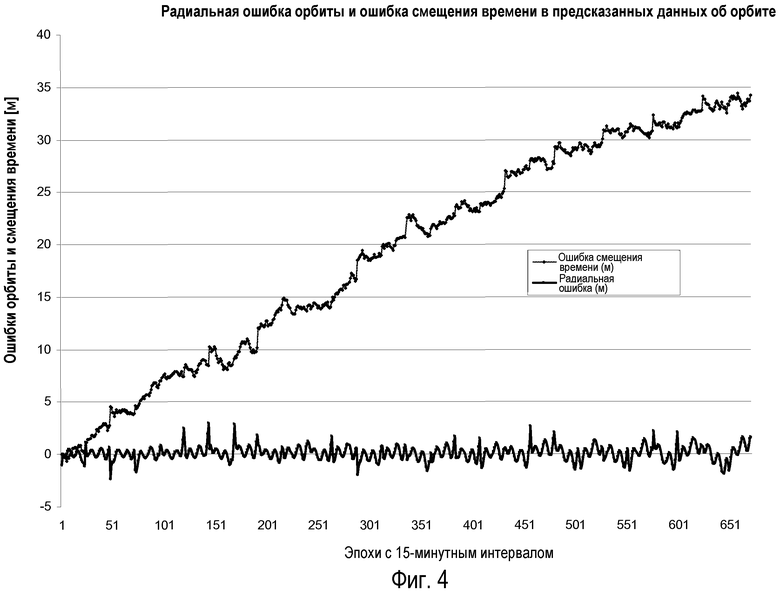
Фиг.4А - диаграмма, показывающая две составляющие ошибки в предсказанных данных об орбите спутника. Первая составляющая ошибки является ошибкой орбиты спутника в радиальном направлении (радиальная ошибка орбиты), а вторая составляющая ошибки является ошибкой смещения времени спутника (ошибка смещения времени). Радиальная ошибка орбиты равна разности между предсказанными и фактическими радиальными положениями орбиты, а ошибка смещения времени равна разности между предсказанными и фактическими смещениями времени. Ось X на диаграмме указывает время, а ось Y указывает величину ошибок в метрах. Диаграмма показывает, что ошибка смещения времени значительно увеличивается со временем, тогда как радиальная ошибка орбиты колеблется около нуля. Таким образом, диаграмма показывает, что точность смещения времени в предсказанных данных об орбите быстро ухудшается со временем.
Смещение времени в предсказанных данных об орбите (предсказанное смещение времени) может корректироваться с помощью двух подходов. Одним подходом является использование данных об орбите в реальном времени в более раннем периоде времени спутника, чтобы скорректировать предсказанное смещение времени у того же спутника в текущем или будущем периоде времени. Другим подходом является использование данных об орбите в реальном времени от других спутников, чтобы предоставить коррекцию для спутника в том же периоде времени. В первом подходе, чем "свежее" (например, чем меньше отклонение от TOE) данные об орбите в реальном времени, тем точнее коррекция. Чтобы сделать коррекцию, предсказанное смещение времени может сравниваться с транслируемыми параметрами спутника в реальном времени (например, из субкадра 1 навигации GPS), чтобы определить величину коррекции к предсказанному смещению времени. Коррекция может включать в себя относительный сдвиг и наклон. После коррекции MS 120 может использовать предсказанные данные об орбите (включающие предсказанное смещение времени) для определения фиксации, когда данные об орбите в реальном времени становятся недоступными.
Чтобы дополнительно объяснить второй подход, полезно пояснить, что второй подход используется в "переопределенной" системе. То есть количество спутников с данными об орбите в реальном времени (в этом документе называемое "группой спутников") больше либо равно количеству неизвестных в мобильной фиксации. MS 120 может однозначно определять фиксацию с использованием количества спутников в группе спутников, которое равно количеству неизвестных в фиксации. Данные об орбите в реальном времени, доступные для группы спутников, и соответствующие измеренные псевдодальности могут использоваться для коррекции предсказанного смещения времени у одного или более спутников вне группы спутников.
В качестве иллюстрации, для оценки двумерного положения (предполагая, что на MS 120 доступны достаточно точные сведения о высоте) MS 120 потребуется три видимых спутника для определения неизвестных параметров, включающих в себя мобильное положение в двух измерениях и время. Данные об орбите в реальном времени, доступные для трех видимых спутников и соответствующих измеренных псевдодальностей, могут использоваться для коррекции предсказанного смещения времени для дополнительных видимых спутников (например, четвертого видимого спутника только с предсказанным смещением времени). Для оценки трехмерного положения MS 120 потребуется четыре видимых спутника для определения неизвестных параметров, включающих в себя мобильное положение в трех измерениях и время. Данные об орбите в реальном времени, доступные для четырех видимых спутников и соответствующих измеренных псевдодальностей, могут использоваться для коррекции предсказанного смещения времени для пятого видимого спутника. Если предсказанные смещения времени от шестого спутника и седьмого спутника также доступны для MS 120, то данные об орбите в реальном времени, предоставленные четырьмя видимыми спутниками, и соответствующие измеренные псевдодальности могут использоваться для коррекции предсказанного смещения времени для дополнительных спутников (например, шестого и седьмого, и т.д.). Коррекция к предсказанному смещению времени может вычисляться посредством взвешенного метода наименьших квадратов (WLS), фильтра Калмана или некоторых других линейных, линеаризованных или нелинейных способов оценки. Эти коррекции могут выполняться в фоне во время работы GPS, даже когда видно полное созвездие GPS, обновляя предсказанные данные для наилучшей точности и производительности, когда теряется видимость спутников и когда эфемериды ухудшились до такой степени, что точнее будет использовать предсказанные или гибридные предсказанные данные.
Описанные в этом документе гибридные методики могут применяться к объединению спутниковых систем позиционирования (SPS) или глобальной навигационной спутниковой системе (GNSS), например, но не только, глобальной системе позиционирования (GPS) в Соединенных Штатах, российской системе ГЛОНАСС, европейской системе Galileo, японской системе QZSS, любой системе, которая использует спутники из объединения систем спутников, или любой системе спутников, разработанной в будущем. То есть MS 120 может использовать предсказанные данные об орбите из одной системы спутников (например, GPS) и данные об орбите в реальном времени из одной или более других систем спутников (например, систем Galileo и ГЛОНАСС), чтобы определить фиксацию. MS 120 также может использовать смещения времени в реальном времени у спутников из одной системы спутников, чтобы скорректировать предсказанное смещение времени у спутника (или спутников) из другой системы спутников, если для этих спутников доступны псевдодальности, и если имеется больше наблюдаемых, чем неизвестных в этой системе. Например, смещение времени в реальном времени у спутника в системе Galileo может использоваться для коррекции предсказанного смещения времени спутника в системе ГЛОНАСС. Для правильного применения этого алгоритма MS 120 должно быть известно общее смещение времени между контрольными часами в двух спутниковых системах позиционирования (например, GPS по сравнению с Galileo).
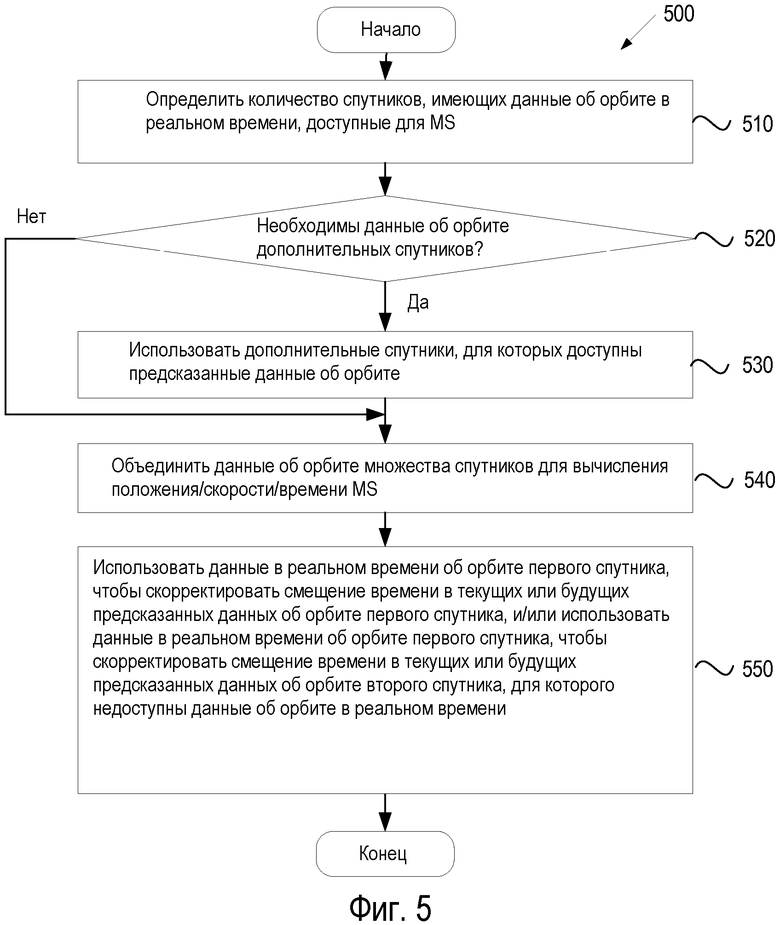
Фиг.5B иллюстрирует блок-схему алгоритма одного примера процесса 500 для определения фиксации положения/скорости/времени на мобильной станции. Процесс 500 может выполняться аппаратным обеспечением (например, схемами, специализированной логикой, программируемой логикой, микрокодом и т.д.), программным обеспечением (например, командами, выполняемыми на устройстве обработки) или их объединением. Процесс 500 может выполняться посредством MS 120 из Фиг.1.
Обратимся к Фиг.5B, на этапе 510 процесс 500 начинается с MS 120, определяющей количество спутников, которые имеют данные об орбите в реальном времени, доступные на MS 120. Как упоминалось выше, количество спутников, необходимое для фиксации, зависит от количества неизвестных на MS 120. Например, если неизвестно ничего из трех пространственных измерений и времени MS 120, то MS 120 потребуются данные об орбите от четырех спутников. В этом сценарии MS 120 в идеале приняла бы данные об орбите в реальном времени от четырех спутников. Однако, если менее четырех спутников предоставляют MS 120 данные об орбите в реальном времени, то MS 120 обратится к одному или более другим спутникам, для которых доступны предсказанные данные об орбите. Как упоминалось выше, количество спутников, имеющих данные об орбите в реальном времени, может отличаться от одного периода времени к следующему из-за затенения, проблем приема и других причин.
Переходя к этапу 520, на основе количества неизвестных у MS 120 процесс 500 определяет, необходимы ли данные об орбите от большего количества спутников. Если необходимы данные об орбите от одного или более дополнительных спутников, то на этапе 530 MS 120 использует предсказанные данные об орбите одного или более дополнительных спутников при определении фиксации. Если MS 120 принимает данные об орбите в реальном времени от достаточного количества спутников или от сервера 130 содействия определению местоположения в предшествующем сеансе AGPS (то есть количество спутников равно количеству неизвестных), то не нужно никаких предсказанных данных об орбите. Переходя к этапу 540, MS 120 объединяет данные об орбите от спутников для вычисления фиксации положения/скорости/времени. В одном аспекте изобретения на этапе 550 MS 120 также использует доступные данные в реальном времени об орбите первого спутника, чтобы скорректировать смещение времени спутника в текущем или будущем предсказанном смещении времени первого спутника, и/или использует доступные данные в реальном времени об орбите первого спутника, чтобы скорректировать смещение времени спутника в текущих или будущих предсказанных данных об орбите второго спутника, для которого недоступны данные об орбите в реальном времени. Второй спутник может находиться в той же или в другой системе спутников, что и первый спутник, как описано выше.
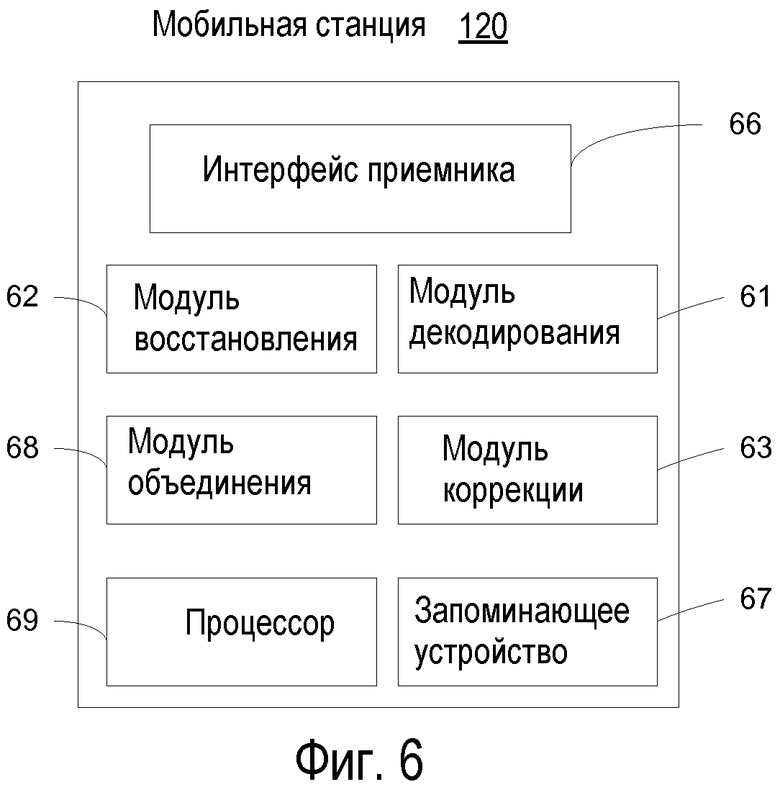
Фиг.6 предоставляет пример блок-схемы компонентов MS 120. MS 120 включает в себя запоминающее устройство 67 и процессор 69. MS 120 также включает в себя интерфейс 66 приемника для приема последовательностей коэффициентов от сервера 130 содействия определению местоположения. Интерфейс 66 приемника также принимает грубые данные об орбите и/или данные об орбите в реальном времени, например альманах, эфемериды и/или другую информацию о положении и синхронизации спутника, из трансляций спутника, от сервера 130 содействия определению местоположения или из других источников данных. Интерфейс 66 приемника может принимать коэффициенты через проводные или беспроводные сети, средства трансляции или любые подходящие средства передачи данных. MS 120 включает в себя модуль 61 декодирования для декодирования последовательностей данных, отправленных от сервера 130 содействия определению местоположения. В одном сценарии MS 120 также может включать в себя модуль 62 восстановления, модуль 68 объединения и модуль 63 коррекции. Модуль 62 восстановления восстанавливает предсказанные данные об орбите, используя последовательность данных, переданную от сервера 130 содействия определению местоположения, например грубые данные об орбите и корректирующие данные. Модуль 68 объединения определяет, действительны ли еще данные об орбите спутника в реальном времени, принятые и сохраненные на MS 120, посредством ведения таймера, который контролирует текущее время по отношению ко времени применимости данных об орбите в реальном времени. В зависимости от доступности и достоверности данных об орбите в реальном времени модуль 68 объединения объединяет данные в реальном времени об орбите некоторых спутников и предсказанные данные об орбите некоторых других спутников, чтобы определить фиксацию. Модуль 63 коррекции использует доступные данные в реальном времени, чтобы скорректировать смещение времени спутника в предсказанных данных, как описывалось выше. Как упоминалось выше, коррекция в смещении времени может быть сделана для того же спутника, для которого доступны данные об орбите в реальном времени, или для другого спутника в той же или другой системе спутников.
Описанные в этом документе методологии могут быть реализованы различными средствами в зависимости от применения. Например, вышеупомянутые компоненты сервера 130 содействия определению местоположения и MS 120 могут быть реализованы в аппаратном обеспечении, аппаратно-программном обеспечении, программном обеспечении или в их объединении. Для реализации в аппаратном обеспечении модули обработки могут реализовываться в одной или более специализированных интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, электронных устройствах, других электронных блоках, спроектированных для выполнения описанных в этом документе функций, или в их объединении.
Для реализации в аппаратно-программном и/или программном обеспечении методологии могут реализовываться с помощью модулей (например, процедур, функций и так далее), которые выполняют описанные здесь функции. Любой машиночитаемый носитель, материально воплощающий команды, может использоваться при реализации описанных в этом документе методологий. Например, обращаясь снова к Фиг.6, коды программного обеспечения могут храниться в запоминающем устройстве (например, запоминающем устройстве 67 в MS 120) и выполняться процессором (например, процессором 69 в MS 120). Запоминающее устройство может быть реализовано внутри процессора или вне процессора. При использовании в данном документе термин "запоминающее устройство" относится к любому типу долговременного, кратковременного, энергозависимого, энергонезависимого или другого запоминающего устройства и не должен ограничиваться никаким конкретным типом запоминающего устройства или количеством запоминающих устройств, или типом носителей, на которых хранится содержимое запоминающего устройства.
Описанные в этом документе способ и устройство могут использоваться с различными спутниковыми системами позиционирования (SPS) или глобальной навигационной спутниковой системой (GNSS), например, но не только, глобальной системой позиционирования (GPS) в Соединенных Штатах, российской системой ГЛОНАСС, европейской системой Galileo, любой системой, которая использует спутники из объединения систем спутников, или любой системой спутников, разработанной в будущем. Кроме того, раскрытые способ и устройство могут использоваться вместе с системами определения положения, которые используют псевдолиты или объединение спутников и псевдолитов. Псевдолиты являются наземными передатчиками, которые транслируют PN-код или другой дальномерный код (аналогичный сигналу сотовой радиосвязи GPS или CDMA), модулированный на несущей частоте L-диапазона (или другой частоте), который может синхронизироваться с временем GPS. Каждому такому передатчику может присваиваться уникальный PN-код, чтобы позволить идентификацию посредством удаленного приемника. Псевдолиты полезны в ситуациях, где сигналы GPS от орбитального спутника могут быть недоступными, например в тоннелях, шахтах, зданиях, городских застройках или других закрытых областях. Другая реализация псевдолитов известна как радиомаяки. Термин "спутник" при использовании в данном документе предназначен, чтобы включать в себя псевдолиты, эквиваленты псевдолитов и по возможности другие. Термин "сигналы SPS" при использовании в данном документе предназначен, чтобы включать в себя SPS-подобные сигналы от псевдолитов или эквивалентов псевдолитов.
Методики определения положения, описанные в этом документе, могут использоваться для различных сетей беспроводной связи, например беспроводной глобальной сети (WWAN), беспроводной локальной сети (WLAN), беспроводной персональной сети (WPAN) и так далее. Термины "сеть" и "система" часто используются взаимозаменяемо. WWAN может быть сетью множественного доступа с кодовым разделением каналов (CDMA), сетью множественного доступа с временным разделением каналов (TDMA), сетью множественного доступа с частотным разделением каналов (FDMA), сетью множественного доступа с ортогональным частотным разделением каналов (OFDMA), сетью множественного доступа с частотным разделением каналов с одной несущей (SC-FDMA) и так далее. Сеть CDMA может реализовывать одну или более технологий радиодоступа (RAT), например CDMA2000, широкополосный CDMA (W-CDMA) и другие современные сети и сети следующего поколения. CDMA2000 включает в себя стандарты IS-95, IS-2000 и IS-856. Сеть TDMA может реализовывать Глобальную систему мобильной связи (GSM), Цифровую усовершенствованную систему мобильной телефонии (D-AMPS) или некоторую другую RAT. GSM и W-CDMA описываются в документах консорциума, именуемого "Проектом Партнерства Третьего Поколения" (3GPP). CDMA2000 описывается в документах консорциума, именуемого "Вторым Проектом Партнерства Третьего Поколения" (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. WLAN может быть сетью IEEE 802.11x, а WPAN может быть сетью Bluetooth, IEEE 802.15x или некоторым другим типом сети. Методики также могут использоваться для любого объединения WWAN, WLAN и/или WPAN.
Хотя настоящее изобретение описано со ссылкой на характерные типовые признаки, должно быть очевидно, что различные модификации и изменения могут быть внесены в эти признаки без отклонения от более широкой сущности и объема изобретения, которые изложены в формуле изобретения. Соответственно, описание изобретения и чертежи должны рассматриваться в пояснительном, а не ограничивающем значении.

Изобретение относится к области радиотехники, а именно к определению местоположения мобильной станции, и может быть использовано в спутниковой системе позиционирования (SPS). Технический результат заключается в обеспечении возможности позволить приемнику SPS использовать доступные данные об орбите для выработки точных положений и синхронизации, даже когда недоступна текущая информация реального времени об орбите и смещении времени. Для этого в способе и системе мобильной станции используют гибридное объединение данных об орбите спутников. В одном аспекте мобильная станция объединяет предсказанные данные об орбите от одного спутника и данные об орбите в реальном времени от другого спутника при определении фиксации, причем объединение может быть сделано для спутников в одинаковой или разных системах спутников. Мобильная станция может использовать данные об орбите спутника в реальном времени в одном периоде времени и предсказанные данные об орбите того же спутника в другом периоде времени. В другом аспекте мобильная станция может использовать данные об орбите в реальном времени для коррекции смещения времени в предсказанных данных об орбите. Коррекция в смещении времени может быть сделана для того же спутника, который предоставляет данные об орбите в реальном времени, или для другого спутника в той же или в другой системе спутников. 13 н. и 4 з.п. ф-лы, 8 ил.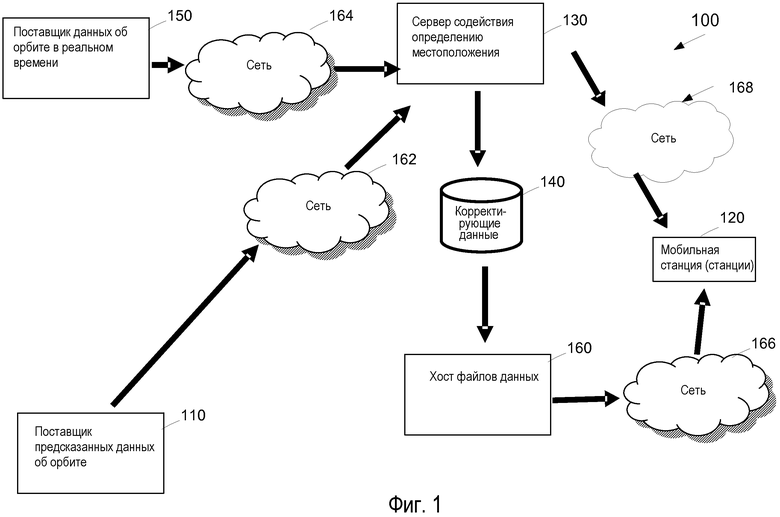
1. Способ определения пространственной и временной информации мобильной станции, содержащий этапы, на которых:
принимают данные в реальном времени об орбите первого спутника и объединяют данные в реальном времени об орбите первого спутника и предсказанные данные об орбите второго спутника при определении пространственной и временной информации мобильной станции, при этом первый спутник и второй спутник принадлежат двум разным системам спутников и при этом предсказанные данные об орбите содержат по меньшей мере одно из следующего: трехмерные значения неопределенности для предсказанных координат спутника, значения неопределенности коррекций предсказанного времени спутника и значения указания предсказанных перерывов спутника.
2. Способ определения пространственной и временной информации мобильной станции, содержащий этапы, на которых:
принимают данные в реальном времени об орбите первого спутника и объединяют данные в реальном времени об орбите первого спутника и предсказанные данные об орбите второго спутника при определении пространственной и временной информации мобильной станции с использованием взвешенного объединения данных об орбите в реальном времени и предсказанных данных об орбите на основе по меньшей мере одного из следующего: Пользовательская точность по дальности (URA), Пользовательская ошибка по дальности (URE), время до времени эфемерид (TOE) и возраст предсказанных данных об орбите с последнего обновления, при этом данные об орбите в реальном времени и предсказанные данные об орбите перекрываются во времени.
3. Способ определения пространственной и временной информации мобильной станции, содержащий этапы, на которых:
принимают данные об орбите в реальном времени от множества спутников для определения пространственной и временной информации мобильной станции и
используют данные об орбите в реальном времени от множества спутников, чтобы скорректировать ошибку в смещении времени в предсказанных данных об орбите одного или более дополнительных спутников, при этом количество спутников во множестве спутников больше либо равно количеству неизвестных в пространственной и временной информации мобильной станции и при этом множество спутников принадлежит разным системам спутников.
4. Способ определения пространственной и временной информации мобильной станции, содержащий этапы, на которых:
принимают данные об орбите в реальном времени от множества спутников для определения пространственной и временной информации мобильной станции и
используют данные об орбите в реальном времени от множества спутников, чтобы скорректировать ошибку в смещении времени в предсказанных данных об орбите одного или более дополнительных спутников, при этом количество спутников во множестве спутников больше либо равно количеству неизвестных в пространственной и временной информации мобильной станции и при этом один или более дополнительных спутников принадлежат первой системе спутников, а множество спутников принадлежит одной или более системам спутников.
5. Система мобильной станции, содержащая:
интерфейс приемника для приема данных в реальном времени об орбите первого спутника и
модуль объединения для объединения данных в реальном времени об орбите первого спутника с предсказанными данными об орбите второго спутника при определении пространственной и временной информации мобильной станции; при этом модуль объединения предназначен для использования предсказанных данных об орбите первого спутника вместо данных в реальном времени об орбите первого спутника при определении пространственной и временной информации мобильной станции, когда данные в реальном времени об орбите первого спутника становятся недоступными, и при этом модуль объединения предназначен для интерполирования данных первого спутника в реальном времени и предсказанных данных об орбите первого спутника, чтобы сгладить переход между данными в реальном времени и предсказанными данными об орбите.
6. Система мобильной станции, содержащая:
интерфейс приемника для приема данных в реальном времени об орбите первого спутника и
модуль объединения для объединения данных в реальном времени об орбите первого спутника с предсказанными данными об орбите второго спутника при определении пространственной и временной информации мобильной станции, при этом модуль объединения предназначен для использования взвешенного объединения на основе по меньшей мере одного из следующего: Пользовательская точность по дальности (URA), Пользовательская ошибка по дальности (URE), время до времени эфемерид (TOE) и возраст предсказанных данных об орбите с последнего обновления, при этом данные об орбите в реальном времени и предсказанные данные об орбите перекрываются во времени.
7. Система мобильной станции, содержащая:
интерфейс приемника для приема данных в реальном времени об орбите первого спутника
модуль объединения для объединения данных в реальном времени об орбите первого спутника с предсказанными данными об орбите второго спутника при определении пространственной и временной информации мобильной станции и
модуль коррекции для коррекции ошибки в смещении времени в предсказанных данных об орбите первого спутника с использованием данных в реальном времени об орбите первого спутника.
8. Система мобильной станции, содержащая:
интерфейс приемника для приема данных в реальном времени об орбите первого спутника и
модуль объединения для объединения данных в реальном времени об орбите первого спутника с предсказанными данными об орбите второго спутника при определении пространственной и временной информации мобильной станции, при этом первый спутник и второй спутник принадлежат двум разным системам спутников и при этом предсказанные данные об орбите содержат по меньшей мере одно из следующего: трехмерные значения неопределенности для предсказанных координат спутника, значения неопределенности коррекций предсказанного времени спутника и значения указания предсказанных перерывов спутника.
9. Система мобильной станции, содержащая:
интерфейс приемника для приема данных в реальном времени об орбите первого спутника;
модуль объединения для объединения данных в реальном времени об орбите первого спутника с предсказанными данными об орбите второго спутника при определении пространственной и временной информации мобильной станции и
модуль восстановления для вычисления приближенного значения для предсказанных данных об орбите на основе грубых данных об орбите второго спутника и коррекции грубых данных об орбите, при этом приближенное значение используется мобильной станцией в качестве предсказанных данных об орбите второго спутника.
10. Система мобильной станции, содержащая:
интерфейс приемника для приема данных об орбите в реальном времени от множества спутников для определения пространственной и временной информации мобильной станции и
модуль коррекции для коррекции ошибки в смещении времени в предсказанных данных об орбите одного или нескольких дополнительных спутников с использованием данных в реальном времени об орбите множества спутников,
при этом количество спутников во множестве спутников больше либо равно количеству неизвестных в пространственной и временной информации мобильной станции.
11. Система по п.10, в которой множество спутников принадлежит разным системам спутников.
12. Система по п.10, в которой один или более дополнительных спутников принадлежат первой системе спутников, а множество спутников принадлежит одной или более другим системам спутников.
13. Система по п.10, в которой модуль коррекции предназначен для использования данных в реальном времени об орбите первого спутника во множестве спутников, чтобы скорректировать ошибку в смещении времени в предсказанных данных об орбите первого спутника.
14. Мобильная станция, содержащая:
средство для приема данных в реальном времени об орбите первого спутника и
средство для объединения данных в реальном времени об орбите первого спутника и предсказанных данных об орбите второго спутника при определении пространственной и временной информации мобильной станции, при этом первый спутник и второй спутник принадлежат двум разным системам спутников и при этом предсказанные данные об орбите содержат по меньшей мере одно из следующего: трехмерные значения неопределенности для предсказанных координат спутника, значения неопределенности коррекций предсказанного времени спутника и значения указания предсказанных перерывов спутника.
15. Мобильная станция, содержащая:
средство для приема данных в реальном времени об орбите первого спутника и
средство для объединения данных в реальном времени об орбите первого спутника и предсказанных данных об орбите второго спутника при определении пространственной и временной информации мобильной станции с использованием взвешенного объединения данных об орбите в реальном времени и предсказанных данных об орбите того же спутника на основе по меньшей мере одного из следующего: Пользовательская точность по дальности (URA), Пользовательская ошибка по дальности (URE), время до времени эфемерид (TOE) и возраст предсказанных данных об орбите с последнего обновления, при этом данные об орбите в реальном времени и предсказанные данные об орбите перекрываются во времени.
16. Компьютерно-читаемый носитель информации, содержащий команды программного обеспечения для выполнения способа определения пространственной и временной информации, которые, при исполнении компьютером, предписывают компьютеру выполнять заранее определенные операции;
при этом заранее определенные операции включают в себя:
прием из первой системы спутников информации, указывающей данные в
реальном времени об орбите первого спутника; и
прием из второй системы спутников информации, указывающей объединение данных в реальном времени об орбите первого спутника и предсказанных данных об орбите второго спутника, при этом вторая система спутников отличается от первой системы спутников и при этом предсказанные данные об орбите содержат по меньшей мере одно из следующего: трехмерные значения неопределенности для предсказанных координат спутника, значения неопределенности коррекций предсказанного времени спутника и значения указания предсказанных перерывов спутника.
17. Компьютерно-читаемый носитель информации по п.16, в котором заранее определенные операции дополнительно приспособлены для генерирования пространственной и временной информации мобильной станции.
| US 2006082497 А1, 20.04.2006 | |||
| US 6798377 Bl, 28.09.2004 | |||
| Milan Horemuz, Johan Vium Andersson ((Polynomial interpolation of GPS satellite coordinates)), 14.01.2006 | |||
| УСТРОЙСТВО РАДИОСВЯЗИ И СИСТЕМА, ВКЛЮЧАЮЩАЯ В СЕБЯ СРЕДСТВО ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ | 1998 |
|
RU2213980C2 |
| US 2007200752 A1, 30.08.2007 | |||
| US 2007299609 A1, 27.12.2007 | |||
| US 5731787 A, 24.03.1998 | |||
| EP 1852711 A1, 07.11.2007 | |||
| US 6058338 A, 02.05.2000 | |||
| US 2006224317 A1, 05.10.2006 | |||
| US 2007247361 A1, 25.10.2007. | |||

