Изобретение относится к области электротехники, в частности может быть использовано для автоматического регулирования возбуждения синхронных машин (СМ) и машин двойного питания.
Известен способ автоматического регулирования возбуждения, реализованный в устройстве, описанный в [авторское свидетельство №534017, опубликованное в Б.И. №40, 1976 г.], а также на стр. 104-110 в [Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л.: Энергоатомиздат, 1983, 128 с., ил.]. Способ включает воздействие на ток возбуждения синхронной машины по результатам измерения реактивного тока, угла «φ» между током и напряжением статора, а также напряжения статора СМ в направлении стабилизации измеряемых величин. Основными недостатками способа являются следующие: измерение напряжения может осуществляться только с постоянной зоной нечувствительности, устанавливаемой вручную при настройке, отсутствуют узлы дистанционного формирования задания для любого из регулирующих воздействий, доступные более высокому управляющему уровню.
Известен также способ автоматического регулирования возбуждения, содержащий зону нечувствительности по напряжению и регулирование реактивного тока по принципу подчиненного регулирования реактивного тока воздействием напряжения вне зоны нечувствительности. Первичная информация об этом способе содержится в [Гендельман Б.Р., Вайнтруб О.Ш., Швецов А.И. Управление мощным двигателем с тиристорным возбуждением и автоматическим регулятором. - Электротехническая промышленность. Электропривод, 1973, вып.5]. В [Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л.: Энергоатомиздат, 1983, 128 с., ил.] на стр.106, рис.6-2, приведена структурная схема, иллюстрирующая этот способ. Недостатком способа является отсутствие возможности самостоятельного задания воздействия реактивного тока на ток возбуждения при значении напряжения статора внутри зоны нечувствительности, а также неизменность зоны нечувствительности по напряжению.
Наиболее близким аналогом (прототипом) является способ автоматического регулирования возбуждения, реализованный в устройстве UNITROL 1000-15R, рекомендуемом производителем для синхронных генераторов и синхронных двигателей ABB. Информация о способе автоматического регулирования возбуждения, реализованном в устройстве UNITROL 1000-15R, приведена в [http://www.abb.ru]. UNITROL 1000-15R выполнен на микропроцессорном уровне, поэтому фактически его описание является описанием способа с указанием выполняемых функций (в общепринятых терминах) и настроечных коэффициентов. В тексте описания этого изделия употребляются как синонимы понятия «функция» и «режим работы». Эти понятия характеризуют воздействие на ток возбуждения по результатам измерения различных параметров режима.
UNITROL 1000-15R реализует следующие отдельные способы регулирования, осуществляемые с высокой точностью (большими коэффициентами усиления как параметрами регулирования или интегральными воздействиями):
- автоматическое регулирование напряжения;
- автоматическое регулирование коэффициента мощности;
- автоматическое регулирование реактивного тока;
- внутренний узел формирования задания для любого из регулирующих воздействий;
- безударное переключение между различными режимами работы.
Эти переключения могут быть осуществлены только дежурным персоналом или диспетчером путем воздействия из меню, предназначенного для изменения режимов работы и настроек.
Недостатком такого способа регулирования является невозможность быстродействующего автоматического переключения между различными режимами работы (способами регулирования) при изменении параметров режима СМ или сети электроснабжения. Например, при снижении напряжения сети ниже предписываемого ГОСТ 13109-97 целесообразно перейти от режима регулирования коэффициента мощности на режим поддержания напряжения для сохранения устойчивости и предотвращения «лавины» напряжения.
Техническим результатом изобретения является автоматическое изменение процесса регулирования возбуждения машины переменного тока в зависимости от параметров режима машины и (или) питающей электросети, в частности в зависимости от отклонения напряжения и (или) изменения сопротивления питающей линии.
Сущность изобретения заключается в том, что в способе автоматического регулирования возбуждения машины переменного тока, состоящем в том, что измеряют в реальном режиме времени реактивный параметр режима и напряжение якоря (статора) этой машины, фиксируемое на некотором расстоянии от зажимов якоря (статора) в пределах длины питающей линии, сравнивают измеренные значения реактивного параметра режима и напряжения якоря (статора) с заданными, получая отклонения реактивного параметра режима и напряжения, суммируют эти отклонения, сравнивая их с заданием тока возбуждения, и, воздействуя на ток возбуждения машины переменного тока, согласно изобретению, изменяют ток возбуждения машины переменного тока при изменении реактивного параметра, стабилизируя этот параметр независимо от изменения напряжения в пределах зоны отклонения измеряемого напряжения, определяемой относительным сопротивлением питающей линии, но не превышающей допустимого отклонения измеряемого напряжения, а вне этой зоны отклонения напряжения воздействуют изменением тока возбуждения на поддержание напряжения независимо от изменения реактивного параметра.
Термин «реактивный параметр» использован как эквивалентный для следующих параметров: угол сдвига фаз между напряжением и током (φ), а также cos либо tg этого угла, значение реактивной мощности или реактивного тока.
Технический результат имеет целью:
а) поддержание нормативных значений коэффициента реактивного параметра и минимума потерь,
б) повышение устойчивости регулируемой машины и смежной нагрузки.
Указанные цели изобретения являются техническими показателями для каждой последовательности воздействий на ток возбуждения при автоматическом изменении процесса регулирования возбуждения машины переменного тока в зависимости от параметров режима машины и (или) питающей электросети и характеризуются следующими техническими и экономическими особенностями.
Нормативный коэффициент реактивного параметра - это так называемый коэффициент мощности (cos φ) или коэффициент реактивной мощности (tg φ). В прошлом предприятиям предписывалось обеспечить средствами компенсации реактивной мощности определенное значение cos φ в зоне контроля мощности и потребляемой электроэнергии по месту присоединения к электроснабжающей организации. В настоящее время применяется tg φ. За нарушение этих требований устанавливаются санкции, которые значительно превышают эффекты от локальной экономии, достигаемой оптимизацией режима генерации реактивной мощности машины переменного тока для минимизации потерь. Поэтому в случае возможности непосредственного регулирования нормативного коэффициента реактивного параметра этот показатель нормального режима является основным. В случаях, когда СМ является одним из средств компенсации реактивной мощности, экономически целесообразно поддерживать постоянным значение генерируемой реактивной мощности (реактивного тока). Если СМ не используется для компенсации реактивной мощности, технически и экономически целесообразен режим минимальных потерь СМ, состоящий в поддержании постоянства нулевой или даже отстающей реактивной мощности. Использование реактивного тока вместо реактивной мощности определяется упрощением измерения. Для поддержания нулевой реактивной мощности все реактивные параметры эквивалентны. Выбор определяется субъективными основаниями или техническими возможностями наличной аппаратуры.
В случае отклонения напряжения за допустимые пределы, определяемые ГОСТ или расчетами конкретной сети электроснабжения, возникает угроза нарушения устойчивости режимов как самой СМ, так и смежной нагрузки, например асинхронных двигателей. Ущерб по выпуску основной продукции от возможного нарушения устойчивости намного превышает потери от прекращения стабилизации реактивных параметров. В этом случае должен использоваться способ воздействия на ток возбуждения по отклонению напряжения, стабилизирующий напряжение в точке измерения на уровне, ограничиваемом только режимом нагрева обмоток СМ.
В формуле изобретения изменение напряжения фиксируют на некотором расстоянии от зажимов якоря в пределах длины питающей линии. Это объясняется тем, что стабилизация напряжения для предотвращения «лавины напряжения» должна осуществляться в зоне расположения смежной нагрузки (например, асинхронных двигателей). Расстояние от СМ до указанной зоны может составлять десятки километров.
Связь между заявленными целями и указанным техническим результатом состоит в автоматической смене процесса регулирования при изменении уровня напряжения, а также автоматическом изменении границ смены процессов регулирования. Простейшим методом определения этих границ является расчет режимов сети и воздействия для изменения границ смены процессов регулирования по программе, но более эффективно определение сопротивления линии питания и автоматическое изменение границ смены процессов регулирования при изменении этого сопротивления, а также уровня напряжения.
Способ поясняется чертежом, на котором показана структурная схема процессов осуществления действий в способе регулирования возбуждения. Элементы структурной схемы имеют символическое значение, определяющее последовательность, характер и параметры воздействий и операций: линиями со стрелками указаны измеряемые параметры режима и направления воздействий, точками на линиях указаны разветвления измерений и воздействий, квадратиками, треугольниками и кружками - операции (процессы осуществления действий) способа или объекты воздействий. Цифрами обозначены операции и параметры способа, дополнительное буквенное обозначение принято для основных действий, параметров и объектов воздействия в способе, принятое в технической литературе.
Обозначения на чертеже:
1 - синхронная машина СМ или машина двойного питания по своим характеристикам регулирования реактивного параметра и напряжения эквивалентная СМ;
2 - ток I статора СМ или узла учета питающей сети;
3 - напряжение U статора СМ или питающей сети;
4 - ток возбуждения If синхронной машины СМ;
5 - узел измерения реактивного параметра q;
6 - узел сравнения измеренного и установленного значений реактивного параметра q;
7 - q0 - установленное значение реактивного параметра;
8 - отклонение Δq реактивного параметра от установленного;
9 - коммутатор воздействия реактивного параметра на ток возбуждения СМ;
10 - усилитель воздействия реактивного параметра на ток возбуждения СМ;
11 - узел суммирования воздействий на ток возбуждения СМ;
12 - установленное значение If0 тока возбуждения СМ;
13 - суммированное управляющее воздействие на ток возбуждения СМ;
14 - силовой преобразователь (возбудитель) управляющего воздействия в ток возбуждения CM; Kif - коэффициент усиления возбудителя;
15 - обратная связь стабилизации тока возбуждения CM; Tif - постоянная времени в цепи обратной связи;
16 - формирователь сигнала для воздействия на ток возбуждения СМ;
17 - узел сравнения измеренного и установленного значений напряжения U статора СМ или питающей сети;
18 - U0 - установленное значение напряжения U;
19 - отклонение значения напряжения ΔU от установленного;
20 - задающее воздействие для формирования границ зоны нечувствительности;
21 - формирователь автоматически управляемой зоны нечувствительности и воздействия напряжения U на ток возбуждения СМ;
22 - формирователь сигнала воздействия напряжения на ток возбуждения СМ с коэффициентом усиления Ku и постоянной времени Tu;
23 - передача воздействия формирователя зоны нечувствительности на коммутатор реактивного параметра;
24 - передача информации об отклонении реактивного параметра формирователю автоматически управляемой зоны нечувствительности для определения сопротивления линии электропитания.
Отличительные признаки изобретения определяются процессами и действиями, отражаемыми совокупностью элементов 9, 20, 21, 23 и 24 структурной схемы, приведенной на чертеже, отсутствующими у аналогов и прототипа и обеспечивающими совместно с остальными элементами способа технический результат.
В соответствии с чертежом у синхронной машины 1 (CM) измеряют ток статора 2 (I) и напряжение статора 3 (U). CM возбуждается током 4 (If). По результатам измерения I и U формируют с помощью узла измерения 5 значение реактивного параметра q. Затем в узле 6 сравнивают значение реактивного параметра q с установленным (заданным) значением 7 (q0). В результате сравнения получают отклонение 8 реактивного параметра Δq. Отклонение 8 используют для воздействия реактивного параметра на ток возбуждения СМ; одновременно отклонение 8 (воздействие «Δq») используют для изменения крайних значений зоны «нечувствительности» в характеристике отклонения напряжения при изменении относительного сопротивления питающей линии Хл. Сопротивление Хл определяется как отношение отклонения напряжения к отклонению реактивного параметра:
Вычисление по формуле (1) выполняют циклически в реальном режиме времени. Время цикла устанавливают в пределах, не влияющих на устойчивость и качество регулирования, указанные в целях способа. Например, время цикла, равное 6,6 мс, пригодно для СМ мощностью более 250 кВт.
Операцию 9 используют для коммутации передачи отклонения 8 на усилитель 10 для воздействия реактивного параметра на ток возбуждения СМ или поддержания фиксированного значения воздействия на усилитель 10. Отклонение 8 передают на усилитель 10, если определяемое узлом 21 воздействие 23 указывает, что отклонение напряжения не превышает границы зоны нечувствительности. Значение коэффициента усиления Kq и временной постоянной Tq воздействия определяется по методике, приведенной в [Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л.: Энергоатомиздат, 1983, 128 с., ил.]. Воздействие на ток возбуждения формируют путем сложения в сумматоре 11 управляющего воздействия 12 (If0) и воздействия после усиления 10. После сумматора 11 используют полученный результат 13 для непосредственного формирования тока If0 с помощью возбудителя 14. Для стабилизации тока возбуждения используют обратное воздействие тока If на процесс 11 суммирования.
Для регулирования по отклонению напряжения преобразуют измеренное переменное напряжение статора U в постоянное значение, соответствующее интегральной характеристике U (например, среднему или максимальному значению) с помощью элемента 16 (например, цифроаналогового преобразования). Полученное значение U сравнивают в узле 17 с установленным значением напряжения, получая отклонение 19 (ΔU), и передают это отклонение для операций 21 формирования автоматически управляемой зоны нечувствительности и воздействия напряжения U на ток возбуждения СМ. Операции 21 формирования автоматически управляемой зоны нечувствительности используют для вычисления значения относительного сопротивления питающей линии Хл по формуле (1) и передачи воздействия 23, указывающего, что отклонение напряжения превышает границы зоны нечувствительности, а также определяющего фиксированное значение воздействия на усилитель 10. Воздействие 20 используют для программного изменения зоны нечувствительности, что особенно важно при малом сопротивлении линии питания, но значительном суточном изменении напряжении вследствие наличия больших удаленных нагрузок, изменяющихся в течение суток.
Если отклонение напряжения ΔU превышает границы зоны нечувствительности, операции 21 используют для получения пропорционального воздействия на ток возбуждения 4 через формирователь 22 и сумматор 11. Динамические характеристики регулирования по напряжению устанавливают, используя параметры формирователя 22. Например, в микроконтроллере это может быть подпрограмма цифрового фильтра.
Если отклонение напряжения ΔU не превышает границы зоны нечувствительности, операции 21 используют для получения фиксированного воздействия на ток возбуждения 4 через формирователь 22 и сумматор 11.
Способ регулирования может осуществляться без использования изменения связи «Δq» при изменении параметров режима, но с использованием программного воздействия. Однако использование изменения этой связи в процессе регулирования увеличивает эффективность регулирования. В аварийных ситуациях сопротивление линии меняется. Например, аварийное отключение одной параллельной линии увеличивает сопротивление питающей сети. Связь «Δq» уменьшит зону «нечувствительности», повышая устойчивость узла нагрузки. К таким же результатам (как аварийное отключение одной параллельной линии) приведет АВР с включением резервной линии большей длины. Расчеты зоны нечувствительности могут выполняться по методике работы [Абрамович Б.Н., Круглый А.А. Возбуждение, регулирование и устойчивость синхронных двигателей. - Л.: Энергоатомиздат, 1983, 128 с., ил.], гл. 6 или по соотношению:

где  .
.
При получении отрицательных значений ΔU по выражению (2), значение ΔU принимается равным нулю. Значения Zб выражены в процентах. Расчеты в реальном времени, обеспечивающие выполнение операций 21, выполняют, например, в микроконтроллере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННОЙ МАШИНЫ | 2002 |
|
RU2242080C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2011 |
|
RU2453021C1 |
| Автоматический регулятор реверсивного синхронного компенсатора | 1975 |
|
SU612379A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ И ПЕРЕДАВАЕМОЙ МОЩНОСТИ ЭЛЕКТРИЧЕСКОЙ СЕТИ | 2010 |
|
RU2446537C1 |
| Устройство для управления электродвигателем переменного тока | 1977 |
|
SU687553A1 |
| Автоматический регулятор возбуждения | 1975 |
|
SU534017A1 |
| СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2011 |
|
RU2480602C1 |
| СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2014 |
|
RU2567112C2 |
| УСТРОЙСТВО ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМОМ НАПРЯЖЕНИЯ В ЭЛЕКТРИЧЕСКОЙ СЕТИ С ПРИМЕНЕНИЕМ fuzzy-ЛОГИКИ | 2011 |
|
RU2467447C1 |
| Система автоматического регулирования возбуждения реверсивного синхронного компенсатора | 1985 |
|
SU1309253A1 |
Изобретение отностится к области электротехники и может быть использовано в синхронных машинах и машинах двойного питания. Техническим результатом изобретения является автоматическое изменение процесса регулирования возбуждения машины переменного тока в зависимости от параметров режима машины и (или) питающей электросети, в частности в зависимости от отклонения напряжения и (или) изменения сопротивления питающей линии. В способе автоматического регулирования возбуждения машины переменного тока измеряют в реальном времени реактивный параметр режима и напряжение якоря этой машины, фиксируемое на некотором расстоянии от зажимов якоря в пределах длины питающей линии и воздействуют на ток возбуждения машины переменного тока, при этом изменяют ток возбуждения машины переменного тока при изменении реактивного параметра, стабилизируя этот параметр независимо от изменения напряжения в пределах зоны отклонения измеряемого напряжения, определяемой относительным сопротивлением питающей линии, но не превышающей допустимого отклонения измеряемого напряжения, а вне этой зоны отклонения напряжения воздействуют изменением тока возбуждения на поддержание напряжения, одновременно поддерживая неизменным реактивный параметр. 1 ил.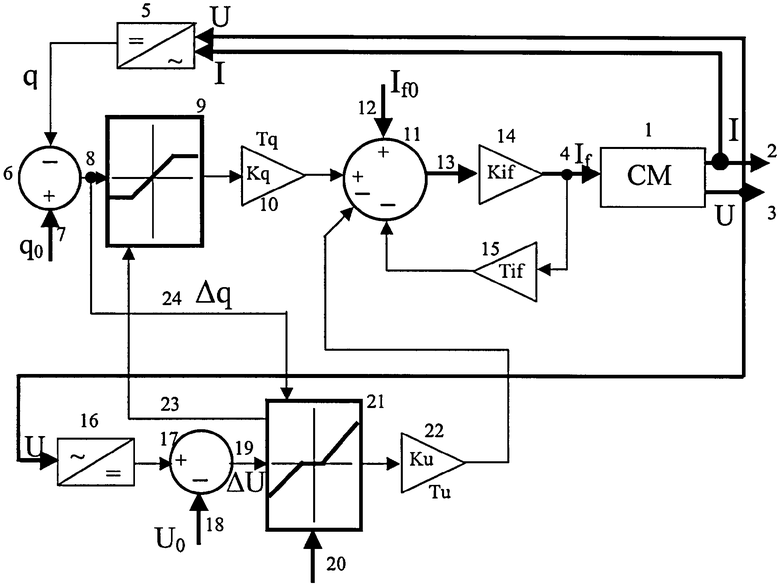
Способ автоматического регулирования возбуждения машины переменного тока, состоящий в том, что измеряют в реальном времени реактивный параметр режима и напряжение якоря этой машины, фиксируемое на некотором расстоянии от зажимов якоря в пределах длины питающей линии, и воздействуют на ток возбуждения машины переменного тока, отличающийся тем, что изменяют ток возбуждения машины переменного тока при изменении реактивного параметра, стабилизируя этот параметр независимо от изменения напряжения в пределах зоны отклонения измеряемого напряжения, определяемой относительным сопротивлением питающей линии, но не превышающей допустимого отклонения измеряемого напряжения, а вне этой зоны отклонения напряжения воздействуют изменением тока возбуждения на поддержание напряжения, одновременно поддерживая неизменным реактивный параметр.
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| Способ газового отопления котлов | 1931 |
|
SU25663A1 |
| Устройство для возбуждения синхронного двигателя | 1990 |
|
SU1739470A1 |
| Способ автоматического определения температуры кристаллизации бензола | 1987 |
|
SU1430844A1 |
| US 2006033465 A1, 16.02.2006 | |||
| JP 5083965 A, 02.04.1992. | |||

